1. Introduction
Pick-and-place operations are among the most common in industrial applications. Within the production process, which may include, e.g., assembly, packaging, bin picking, and inspection, manipulators are commonly used in modern manufacturing environments. Given the wide range of activities that pick-and-place manipulators can perform, research related to the efficiency of these applications is of evident importance.
The productivity of this type of line, where several robots work synergistically, strictly depends on each individual manipulator’s cycle time. The reduction in the cycle time is closely related to the maximum achievable speed, which depends on many factors, including manipulator structure, efficient trajectory programming, and an effective control strategy.
In many applications of this kind, where high speed and precision are required, parallel kinematics manipulators offer many advantages due to their features. Compared with their serial counterparts, their closed-loop architecture makes them generally stiffer. In addition, they also offer better dynamic performance due to the positioning of the motors on the base, which reduces significantly the total moving mass.
As mentioned earlier, making the most of the structural advantages of these manipulators requires appropriate control systems. The existing research on control systems for PKMs (parallel kinematics machines) can be categorized into the following two distinct groups: error-based controllers and model-based controllers. Alternatively, there are also hybrid versions that combine aspects of both types. Error-based controllers, such as PID and its variations, are decentralized. They only consider joint errors and do not take into account the manipulator’s dynamic model, unlike model-based controllers. The computed torque controller family falls under this second category. The use of a descriptive model of the system and the knowledge of its characteristic parameters can provide a number of performance advantages, notwithstanding difficulties related to the model’s uncertainties. Both types of controllers have several advantages and disadvantages; for this reason, several research studies have been conducted to compare the performance of the two families of control systems [
1], focusing on different kinds of parallel kinematic robots as test rigs. Many contributions not only compare model-based controllers with those most widely used to control PKMs such as PD, but offer solutions to improve the efficiency of both.
An effective way to improve performance is the use of variable gains, which has been proposed in several studies. This idea has resulted in numerous contributions towards enhancing performance. A recent example presented in [
2] deals with the motion control of a 6-DOF Altinay Stewart–Gough platform, comparing experimentally the following two control techniques: PD and computed torque control (CTC), also known as inverse dynamics control (IDC). Non-linear gains (NPD and NCTC) and a non-linear observer were added for velocity estimation in both controllers to enhance the performance. The experimental results show that the non-linearity of the gains contributes more to improving performance than the controller structure. The performance improvement of the classical CTC using a non-linear PD component was presented earlier, applied to a planar parallel manipulator, in [
3]. In [
4], a sliding mode control structure was enhanced through the use of fuzzy logic aimed at a reduction in the control effort and in the chattering phenomena; moreover, the developed controller was tested on a simulated Stewart–Gough platform. Another recent article that focuses on a Stewart-like PKM is [
5], in which a robot is controlled using an LQI controller whose gains are tuned in real-time using an artificial neural network. The proposed control strategy is first developed co-simulating the mechanical system and the regulator, and a prototype is subsequently used to experimentally characterize the controller. In [
6], a novel 4-DOF 3T1R parallel robot is controlled using a robust control based on a grey-box dynamic model of the manipulator. Some of the dynamic contributions are modelled analytically; others, such as the Coriolis, centrifugal, and gravitational actions, are approximated using a neural network to reduce the modelling effort. A robust sliding mode control approach is then developed and experimentally tested both on a multisine trajectory and on a simple pick-and-place motion. In [
7], a four-limb parallel manipulator with Schoenflies motion, which is designed for pick-and-place applications, is presented. The paper proposes an experimental validation of an inverse dynamics control applied to a simple pick-and-place trajectory. Starting from the obtained results, the same authors propose a more advanced control system in [
8]. In this case, a PD controller with the addition of an offline precomputed torque is presented. The controller gains are modified in real-time by exploiting fuzzy logic and a bat algorithm. The authors justify the proposal’s use of fuzzy logic due to the need to use model information to achieve good performance and, simultaneously, the difficulty when building an accurate model. Therefore, a simplified model is used for the bat algorithm, which does not consider the rods’ inertia. The evaluation of the proposed system is only simulated on the system model using the same trajectory of the previous work. In addition to the variable gains, the article exploits the dynamic model of the manipulator by adding a feedforward contribution to the PD controller. In [
9], the same strategy is applied on a 3PRRR prototype, a planar kinematically redundant parallel manipulator, on which the authors test a PID controller with a feedforward component dependent on the robot’s model. Using a camera to detect the end-effector position in space, the paper finally proposes a hybrid joint-task space computed torque control strategy, experimentally proven to be the most effective. Visual servoing is used also in [
10] to improve the performance of controllers applied to a parallel 6-RSS robot. Three controllers were implemented and compared: a joint space controller, which does not rely on the camera feedback; a task space controller with visual feedback; and a visual servoing dynamic sliding mode controller. The best results in terms of tracking errors were obtained with the sliding mode controller, while the joint space regulator led to the worst performance. Focused only on performance comparison, ref. [
11] presents the experimental validation of a CT controller applied to a 3-DOF translational parallel manipulator. The results show that, compared to a PD controller, the model-based controller offers better positioning performances.
Among the parallel kinematics manipulators covered in the various surveys, several papers focus on 5R robots.
In 2022, Rodriguez [
12] shows the application of a CTC to a five-bar manipulator. The 2-DOF system is a prototype with small motors. The considered trajectory develops in 70 s, requiring the addition of an integrative component to compensate for errors due to low motion dynamics. In the same year, Coutinho [
13] shows an experimental comparison of two controllers, a PD and a CTC, and the contribution of a Sliding Mode (SM) component. With experimental tests performed on a 2-DOF prototype, both the PD + SM and CT + SM hybrid controllers were shown to reduce the tracking errors, with the one based on the dynamic model being proved more effective. The combination of sliding mode control with classical CTC is also evaluated in [
14]. The comparison between the CT + SM and the generic CTC is performed on the simulated system, showing good performances for both controllers. Another contribution proposing the simulation-based comparison of different types of controllers is [
15], where SMC is compared with PD and CTC, concluding that SMC is more robust to uncertainties. In [
16], the application of a PD controller with precomputed torque feedforward is proposed, where non-linear gains are calibrated in real-time by exploiting neural networks. Compared with a classical CTC, the presented controller offers better performances; however, the results were not validated experimentally, but rather with simulations on the manipulator model. Another research applied to the five-bar mechanism, focused instead on PID controllers, is presented in [
17]. Numerical simulations of a finite-time non-linear PID regulation controller, applied to the model of a five-bar mechanism were conducted. The simulations’ results confirm the usefulness of the proposed approach.
Recalling the interest of PKM robots for industrial pick-and-place applications, the analysis of articles concerning the use of different controllers on parallel kinematics manipulators reveals some of the following main shortcomings:
The present paper deals with an experimental evaluation of the dynamic performances of a 5R 4-DOF robot controlled by an inverse dynamics controller. The design procedure commonly used for robotic or mechatronic systems gives a high confidence level for the evaluation of the mass parameters of the robot. Based on this knowledge already available at the system design level, and on the dynamic model of the robot, the authors chose the inverse dynamics control structure, whose parameters directly come from the design procedure. Moreover, the robot performances obtained using the inverse dynamics controller is compared with the ones of error-based PD/PID controllers, which, being in widespread use, can be considered useful benchmarks. In light of the previous analysis of the literature, the main contributions of the present paper can be summarized as follows:
The experimental activities are conducted on a robot designed for high-speed pick-and-place operations in industrial applications; furthermore, the performances of the system are investigated using a pick-and-place trajectory [
14] that fully exploits the manipulator’s characteristics;
The pick-and-place trajectory used for the experimental activities does not lie just on a plane, but it also has out-of-plane sections; moreover, it features both highly dynamic and quasi-static portions;
The ID controller is applied in the task space and not, as is commonly done, in the joint space;
The different contributions that constitute the global controller signal are evaluated and discussed.
The article is structured as follows:
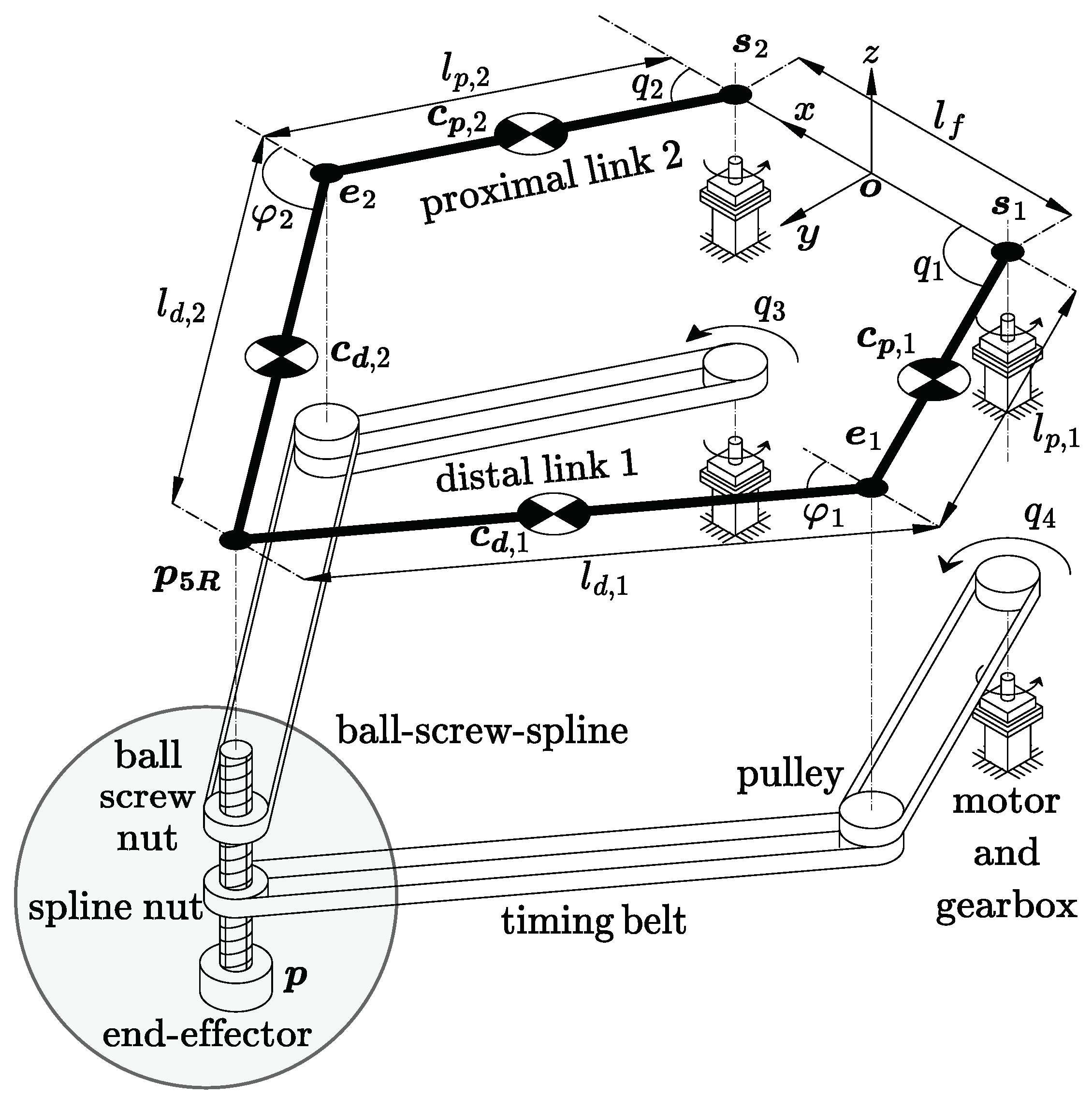
Section 2 presents the dynamic and the kinematic model of the robot object of the investigation (
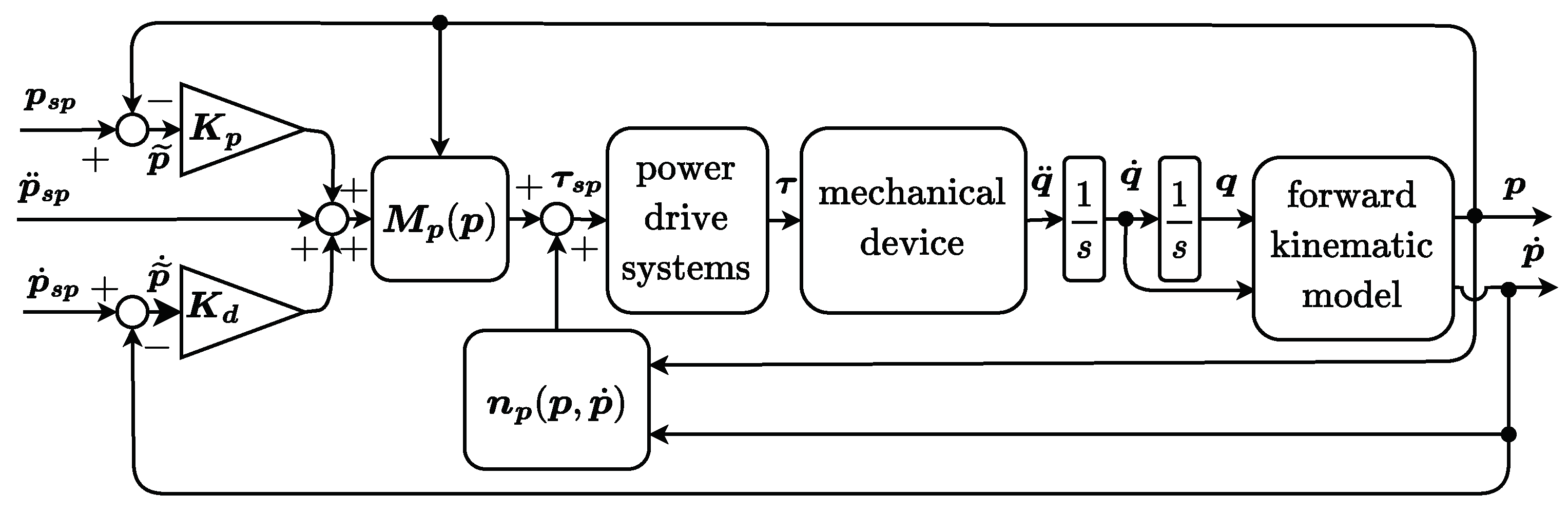
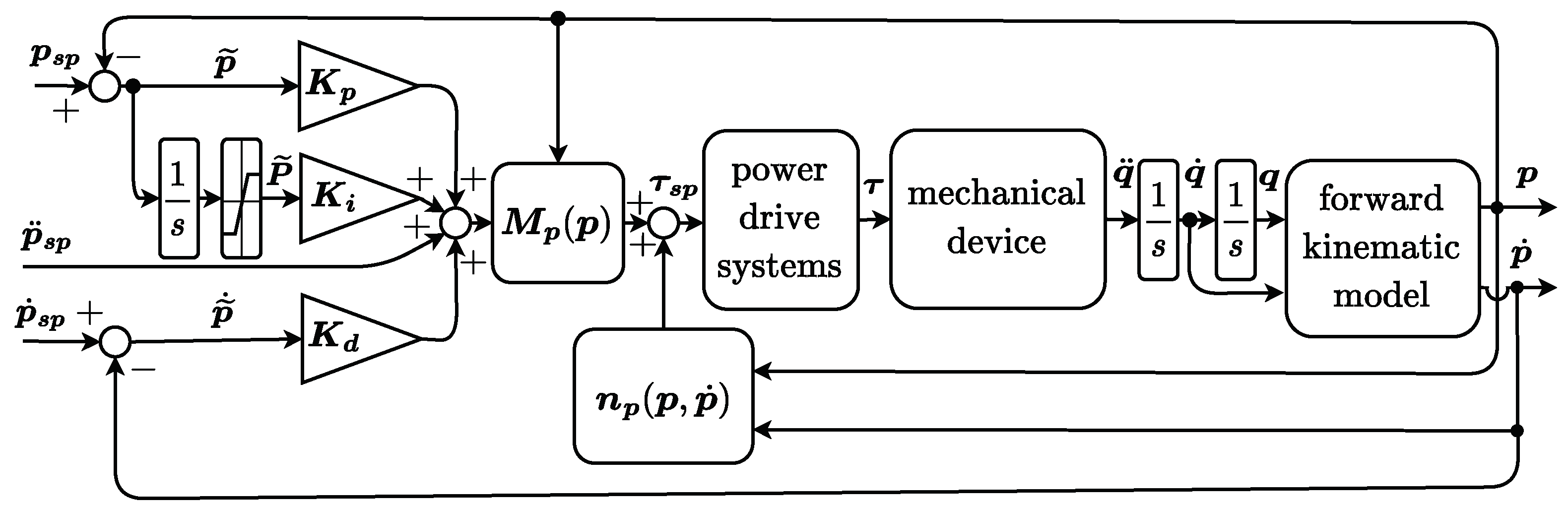
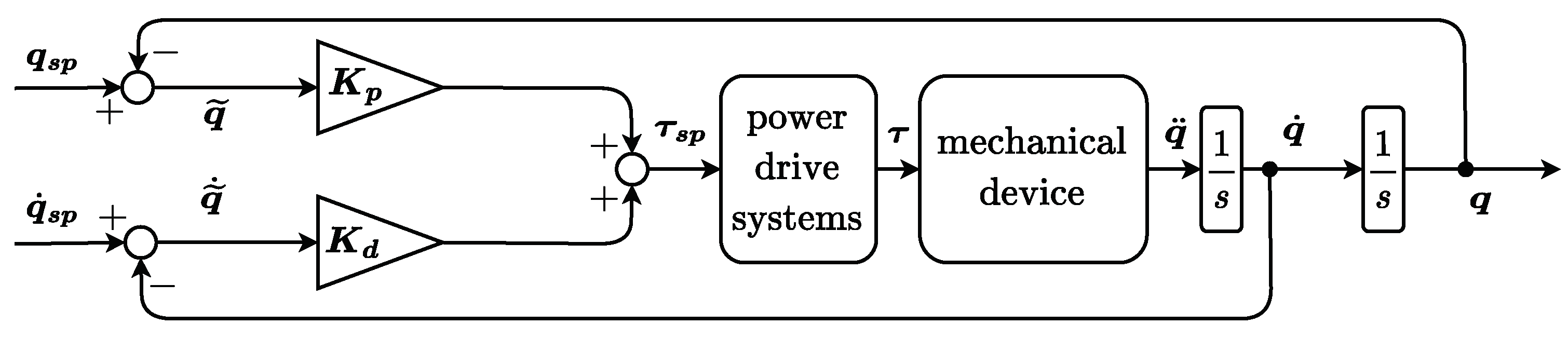
Section 2.1), the control schemes (
Section 2.2), the reference pick-and-place task (
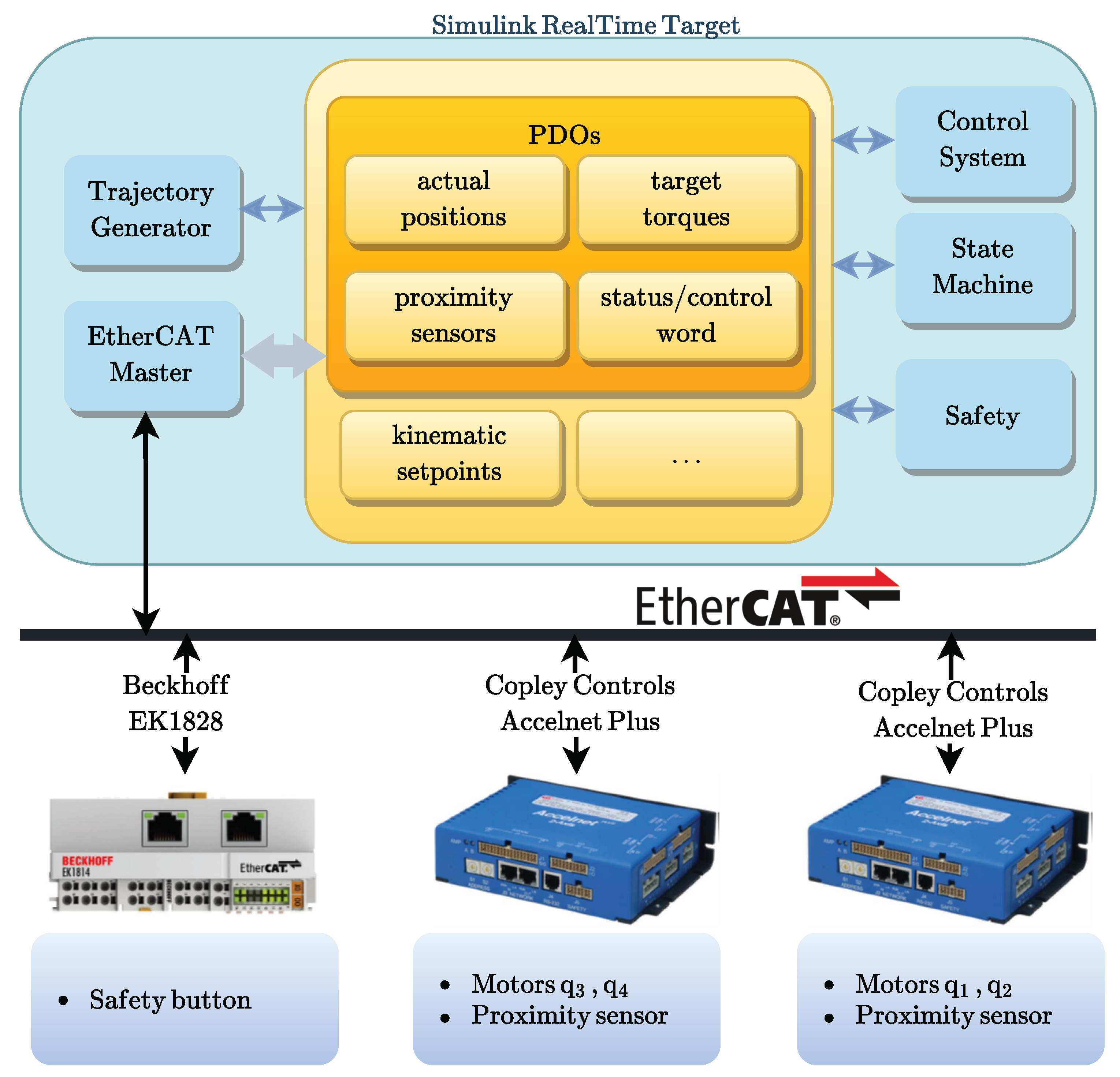
Section 2.3), and the software and hardware equipment (
Section 2.4) used for the experimental activities.
Section 3 discusses the collected experimental results and compares the investigated controllers’ performances. Finally, some conclusions are drawn in
Section 4.
3. Results and Discussion
In this section, the main experimental findings related to the performance of the task space centralized controllers are reported and discussed also through comparison with the joint space PD and PID controllers. Some of the reported results concern the entire workcycle, whereas others focus solely on the higher speed second half of the pick-and-place cycle in order to present an uncluttered overview of the main findings. Whenever this distinction is not immediately evident, it is made explicit in the course of the discussion. The tests were performed through the execution of the workcycle described in
Section 2.3, once for each controller. The quantities of interest were logged using the functionalities offered by the Simulink Real-Time operating system, and subsequently post-processed and organized in the graphical form presented in the following discussion. The controllers were tuned using different procedures according to their type. For the TSIDC, the gains are such that the dynamics of the in-plane error components nominally have poles at
with damping of
, whereas those of the remaining ones have poles placed at
, with a damping of
. The integral gains of the TSIIDC were, on the other hand, experimentally tuned, leaving the proportional and derivative gains unaltered.
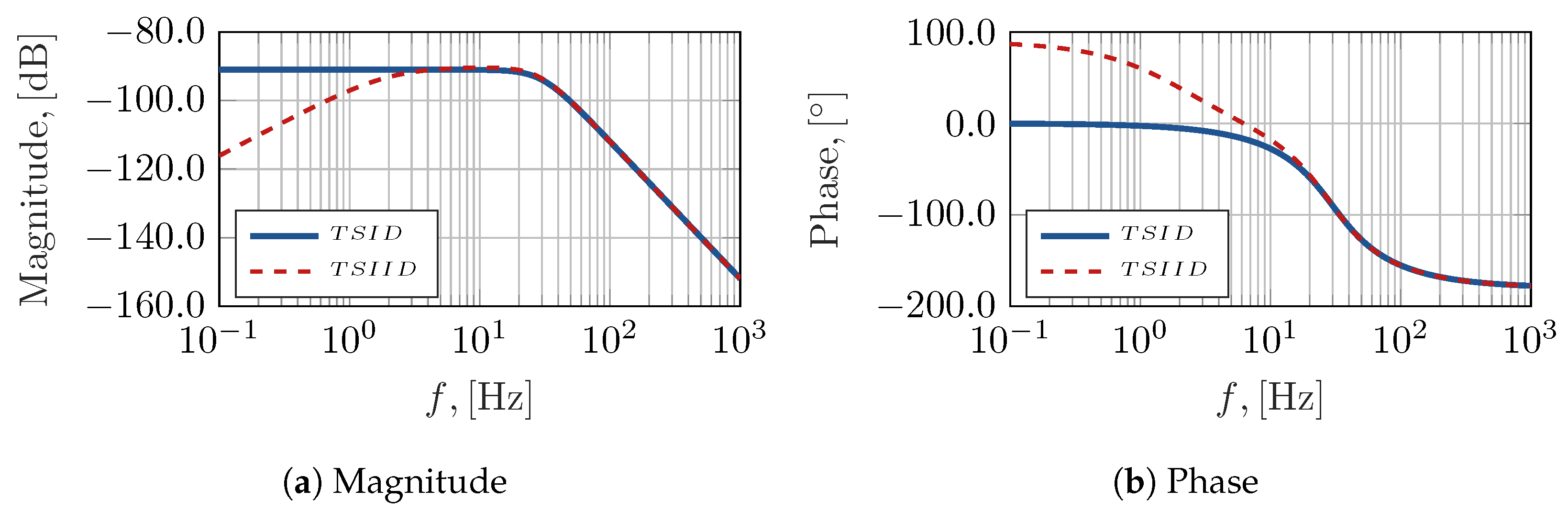
Figure 10 shows the transfer functions from the torque disturbances to the task space in-plane position errors achieved with the TSID and TSIID controllers; in particular, from
Figure 10a it can be observed that the introduction of the integral term improves the rejection of the disturbance’s low frequency components.
The decentralized controllers’ parameters, being less amenable to clear interpretation and representation, were selected with ad hoc tuning aiming at the maximization of the regulator’s performance.
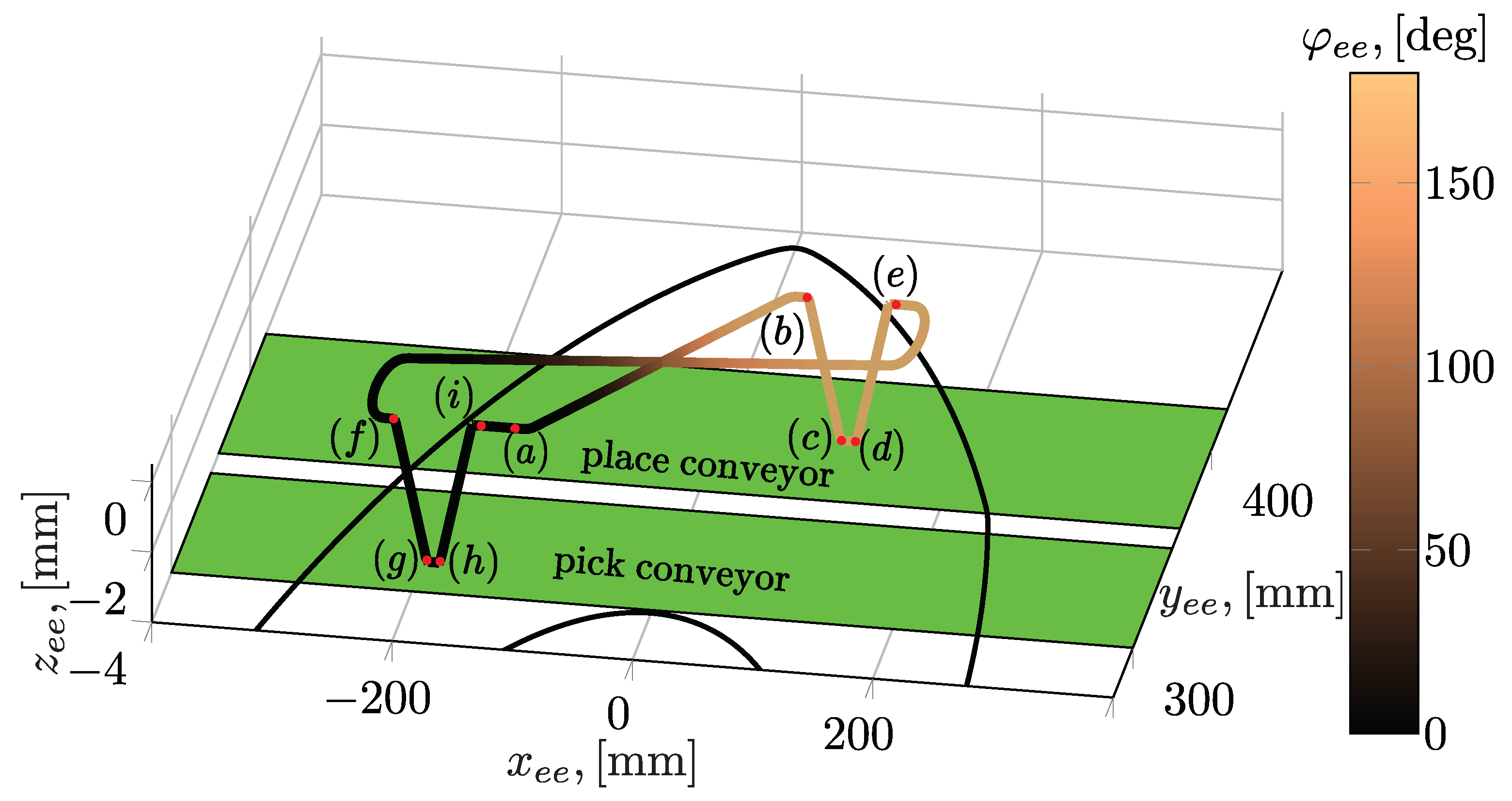
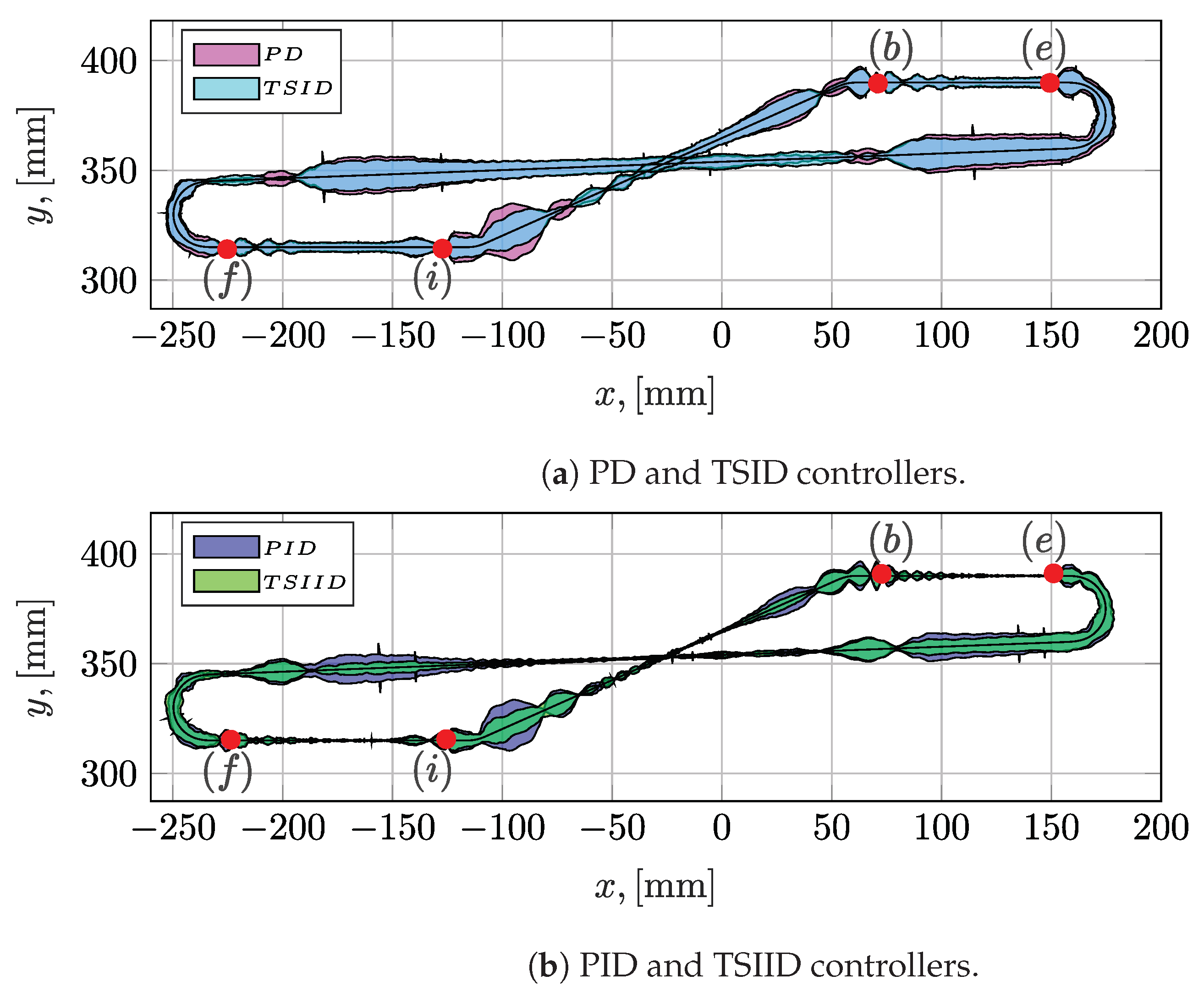
Figure 11 shows the norm of the errors on the horizontal plane, projected along the normal direction of the path and magnified by a factor of 20. The path, whose planar projection is shown in the figure, coincides with the one reported in
Figure 6, and described in detail in
Section 2.3. Here, it may be remarked that the conveyor tracking phases take place between points (b)–(e) and (f)–(i), whereas the remaining portions of the trajectory are fast intercept motions.
Figure 11a in particular shows the errors achieved using the PD and TSID controllers, whereas
Figure 11b depicts the errors obtained using the PID and TSIID controllers. It can be seen that the TSID controller generally performs better than the PD regulator, similarly, the TSIIDC outperforms the PID controller. It therefore appears that the introduction of model-based components is beneficial irrespectively of the presence of an integral term. Through the comparison of
Figure 11a to
Figure 11b it can be concluded that, in general, the introduction of an integral control action leads to significant performance improvements, especially in those phases of the workcycle that are characterized by low accelerations (i.e., the conveyor tracking phases (b)–(e) and (f)–(i), along with the central portions of the intercept motions).
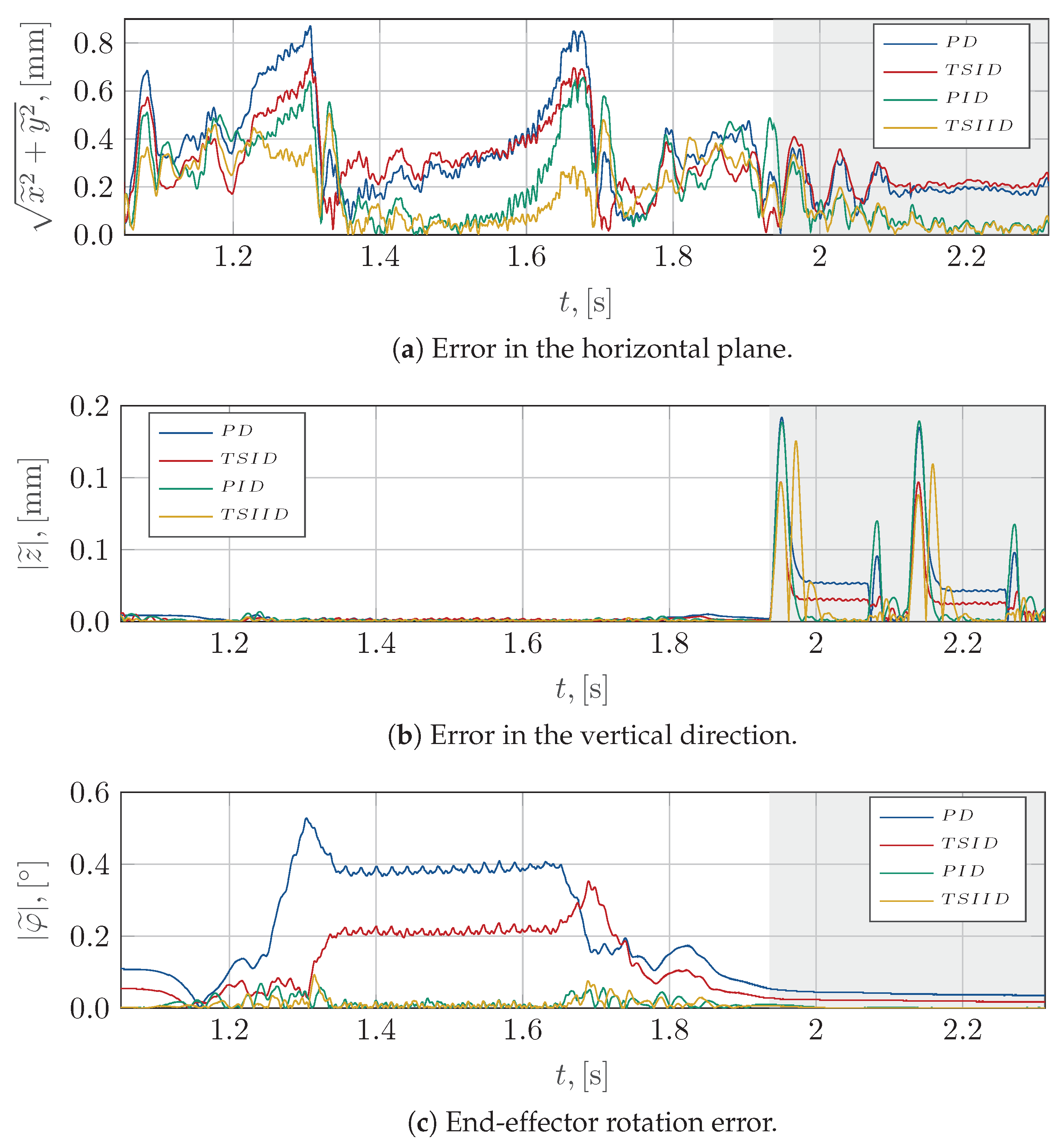
Figure 12 presents the position errors in the time domain, focusing on the second half of the workcycle; the gray area highlights the tracking phase; the same convention is adopted also for subsequent figures.
Figure 12a is clearly consistent with the results already presented in
Figure 11, whereas
Figure 12b,c confirm the analysis above also in relation to the vertical translation and rotation errors. In particular, in
Figure 12b, it can be seen that during the conveyor tracking phases, where the
setpoint is not constant, both the PD controller and the TSIDC lead to relatively large errors, with the TSIDC performing better than the PD regulator. On the contrary, the controllers having an integral contribution are better able to bring the error along the vertical direction to zero. The TSIIDC error displays, however, a more oscillating behaviour compared both to the decentralized controllers and to the TSIDC.
In
Figure 12c, it can be seen that during the intercept motions, where the end-effector should perform a 180 ° rotation, the PD regulator and the TSIDC lag behind the setpoint; additionally, they are unable to bring the error to zero also during the ensuing tracking phase, where the end-effector does not rotate anymore. A significantly better behaviour is instead achieved through the introduction of the integral component, with the PID controller and the TSIIDC performing equally well.
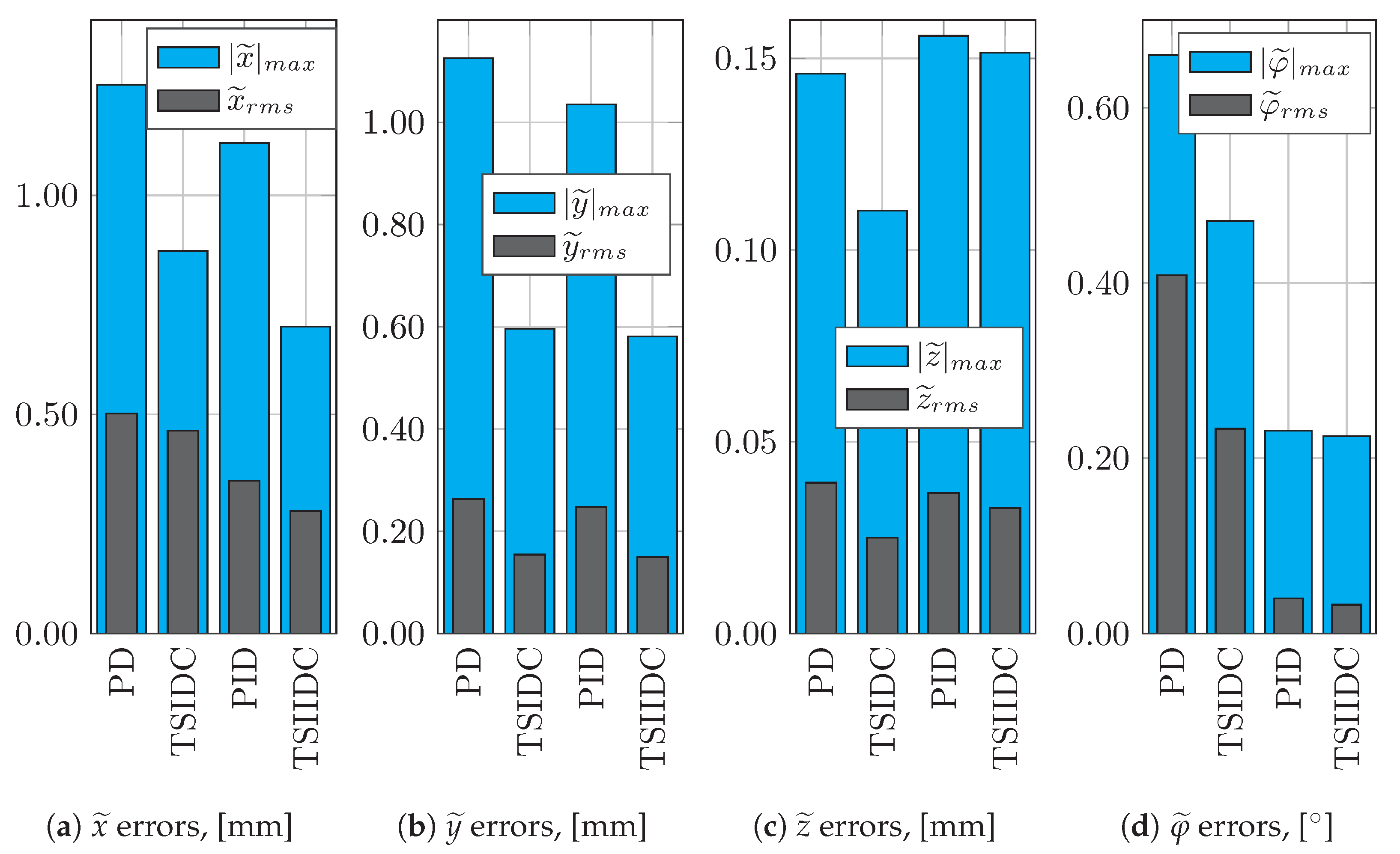
Figure 13 presents the achieved peak and RMS errors computed along the entire workcycle, for each end-effector coordinate and for each controller. This kind of global representation has not been commonly found in the reviewed literature, which focuses mostly on the errors’ time history; however, these synthetic indices are also useful to compare at an aggregate level to the performance of the controllers. Concerning the peak
and
errors, an analogous trend can be discerned, namely, the centralized controllers are able to markedly reduce them. Along the
x direction, the introduction of an integral term appears to be useful to reduce the RMS error, as the PID and TSIID controllers outperform the remaining two. On the other hand, along the
y direction the best performers in terms of the RMS errors are the two centralized controllers. The peak and RMS
errors seem to suggest that, in aggregate terms, the best performer is the TSID regulator; however, a review of
Figure 12b shows that the controllers that also feature an integral term are better able to bring the error to zero in quasi-stationary conditions, occurring, e.g., during the release or grasping phases. As can be seen in
Figure 13d, the rotational error
, both in peak and RMS values progressively improves going from the PD to the TSID and then to the PID and TSIID controllers. It is possible to deduce that for this coordinate, the introduction of an integral term is the most important factor as follows: indeed, notwithstanding the fact that the TSID controller significantly outperforms the PD regulator, further non-negligible improvements are achieved in almost equal measure by the PID and TSIID controllers.
The articles reviewed in the introduction seldom report a measure of the control torques (or currents), with the greatest focus being only on the achieved errors. On the contrary, in this work, not only the overall control torques but also their constitutive components are highlighted, both instantaneously and at the aggregate level. This is done in order to clearly show how each controller operates, and which components of the control systems are actually relevant during the different phases of the test workcycle. In fact, a peculiarity of the case study presented here is the alternation of highly dynamic motions in which inertial forces dominate and of the almost constant velocity phases during which static and viscous friction is expected to act as a relevant source of disturbance.
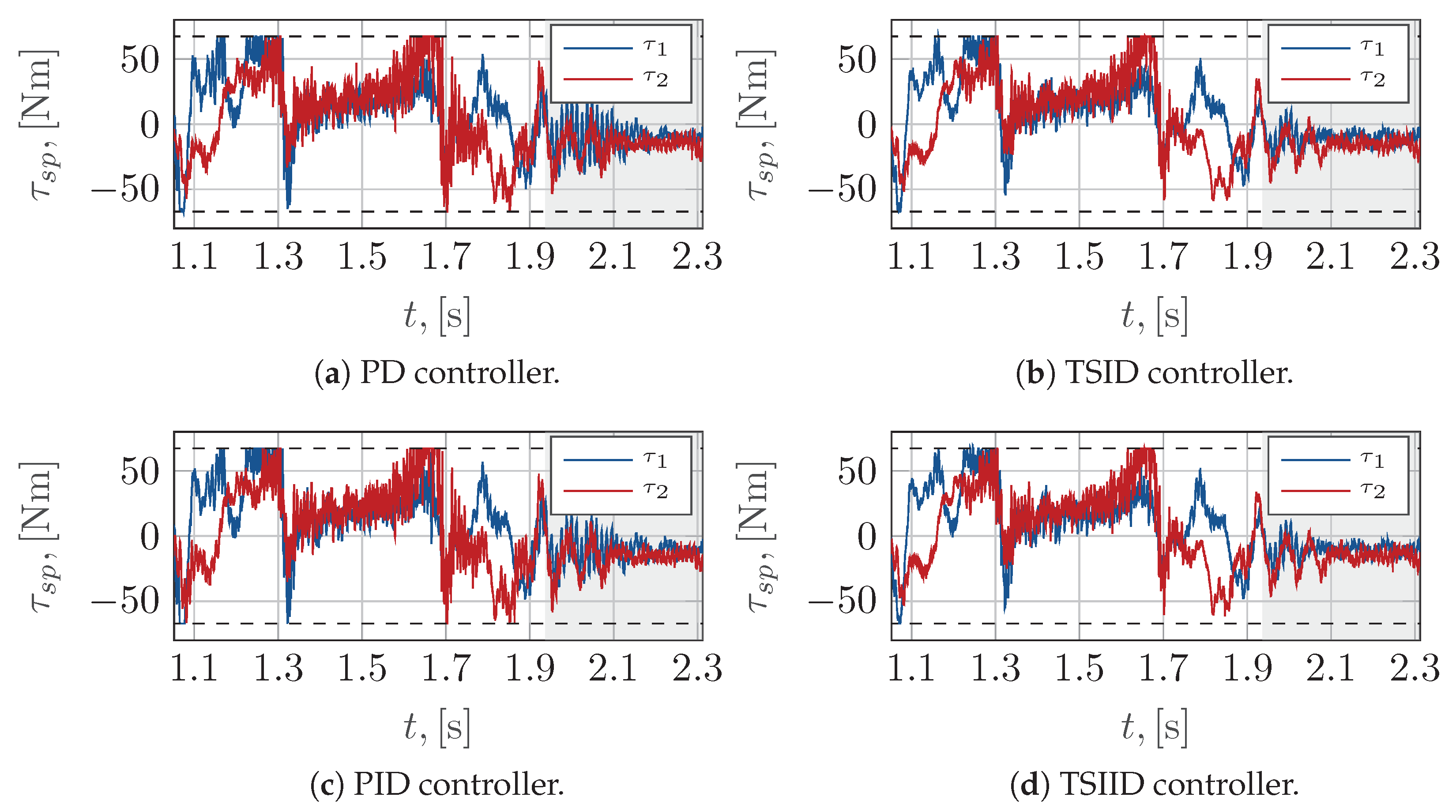
Figure 14 and
Figure 15 illustrate the torque setpoints generated by each controller, respectively, at the motors actuating the joint coordinates
,
and
,
. As already introduced, the possibility of short-term torque saturation was purposely allowed to ensure that the behaviour of the system is investigated up to maximally challenging conditions. Concerning
Figure 14, it can be seen that the overall behaviour is very similar for all controllers, with torque saturations also being reached in all cases around times 1.25 s and 1.65 s. A close inspection reveals that for the centralized controllers, the saturations have a slightly lower duration, and also the remaining torque peaks are less pronounced. The saturations tend to be correlated on the one hand with the in-plane error peaks, and on the other with higher setpoint accelerations.
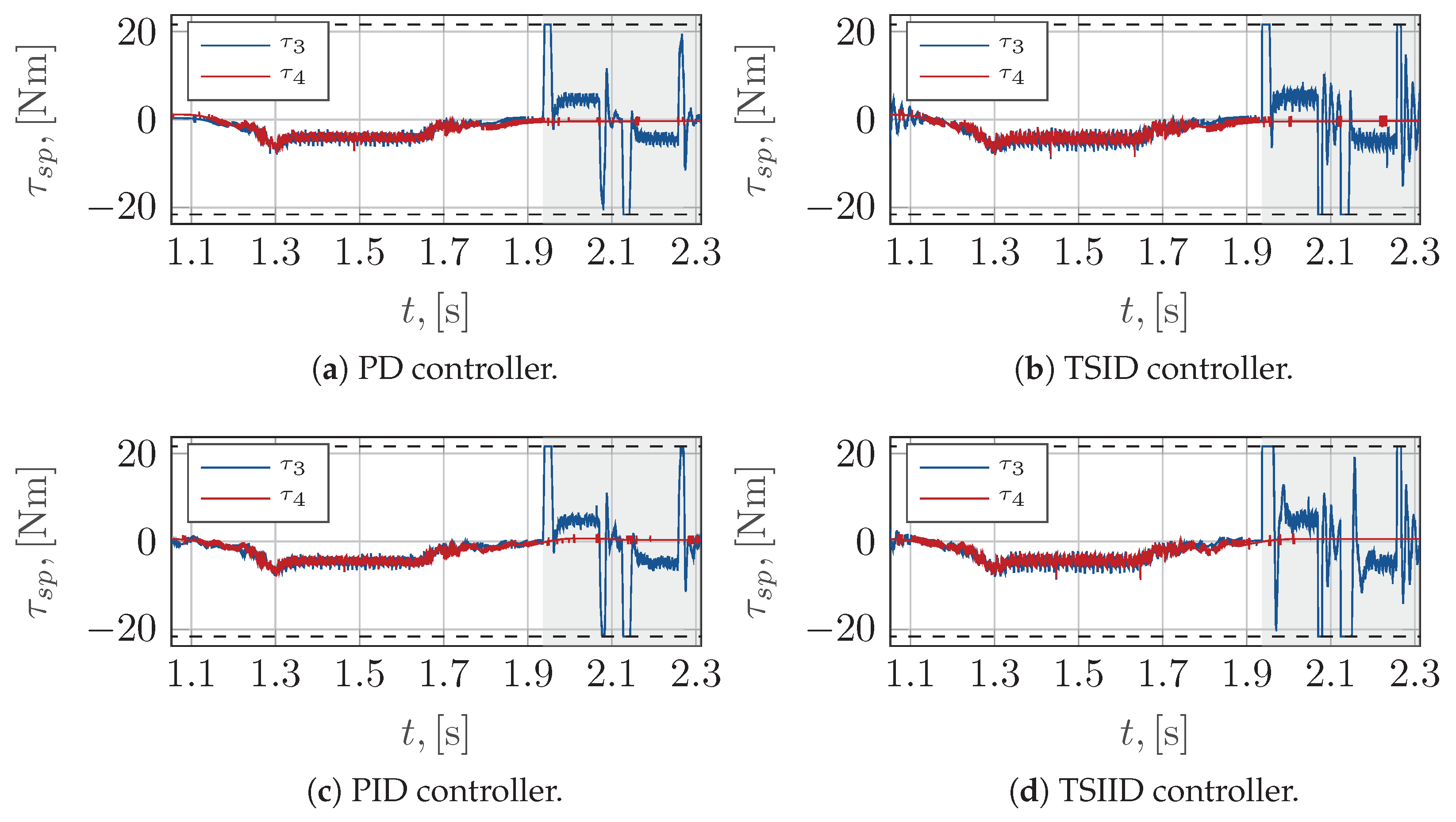
Figure 15 shows that during the target intercept phase, the motors actuating the
joints are not under particular strain; conversely, in the conveyor tracking phase, especially along the vertical descent and ascent motions, motor torque
has a tendency to reach its saturation value. The behaviour of the four regulators is similar in this respect; however, the torque
generated by the centralized controllers displays more marked oscillations.
Figure 16,
Figure 17,
Figure 18 and
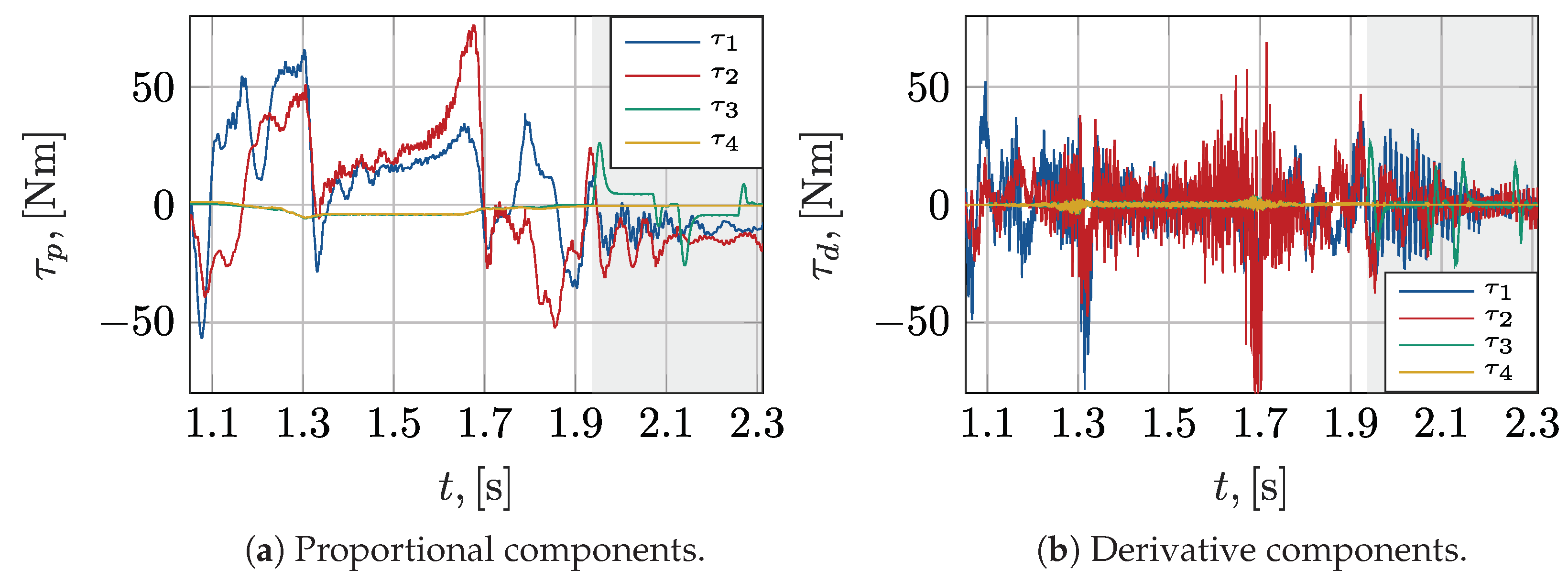
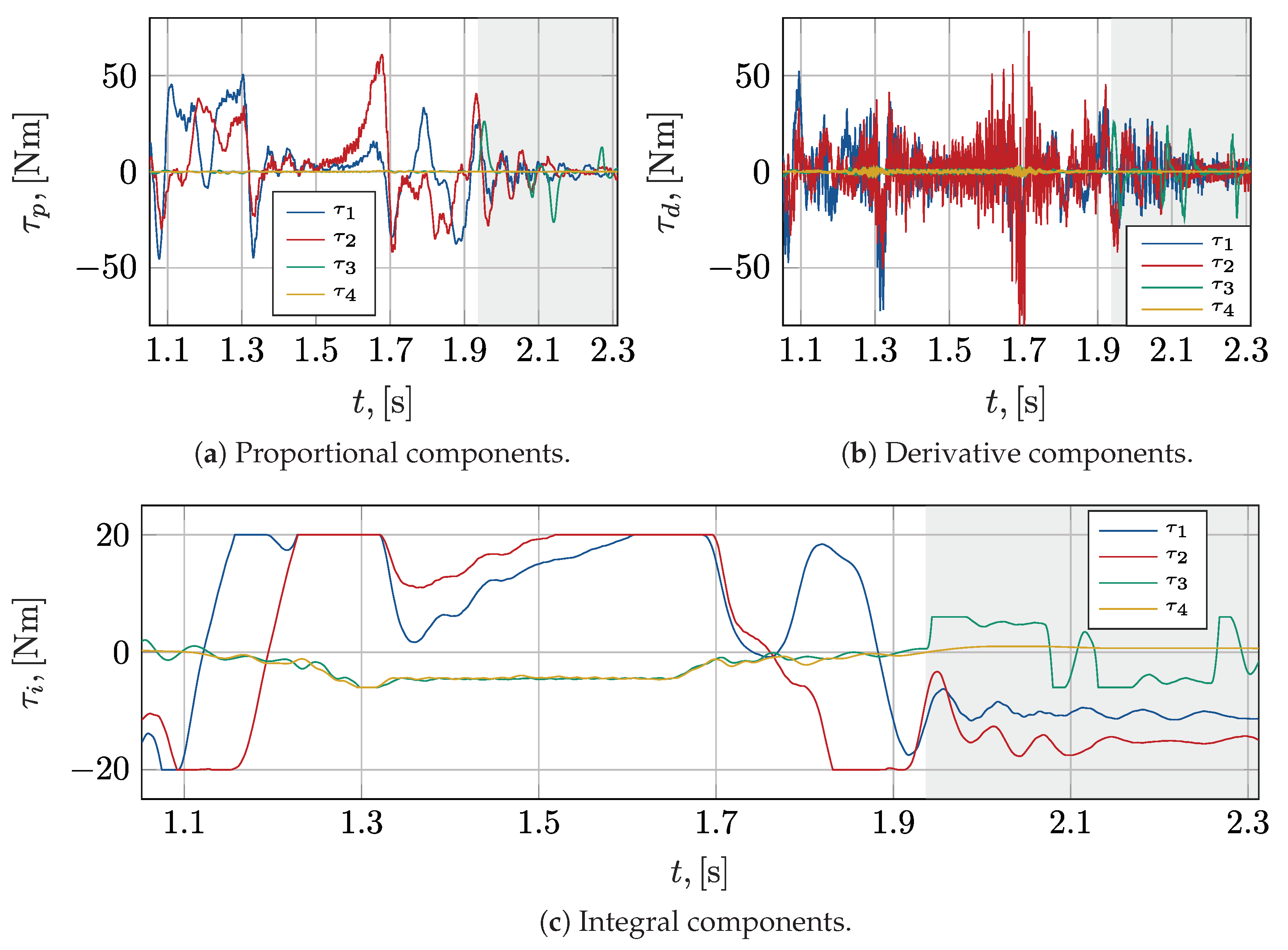
Figure 19 show the several components that contribute to the overall torque setpoint generated by each controller. These torque components are represented without considering the global saturations, since the ability to clearly tell them apart would be otherwise impaired. Comparing
Figure 16 to
Figure 17, it can be clearly seen that the proportional components are not distributed, in the case of the PD controller, around the zero level. Conversely, in the case of the PID controller, the proportional terms, especially in the portions of the trajectory characterized by less pronounced accelerations, decay to or oscillate around zero. This effect is due to the introduction of the integral actions, which successfully prevent, in the several sub-phases of the trajectory, the permanence of non-null position errors, while the overall torques are similar, they result as already commented in quite different error patterns. No significant differences emerge by the comparison between the derivative components of the PD and PID controllers.
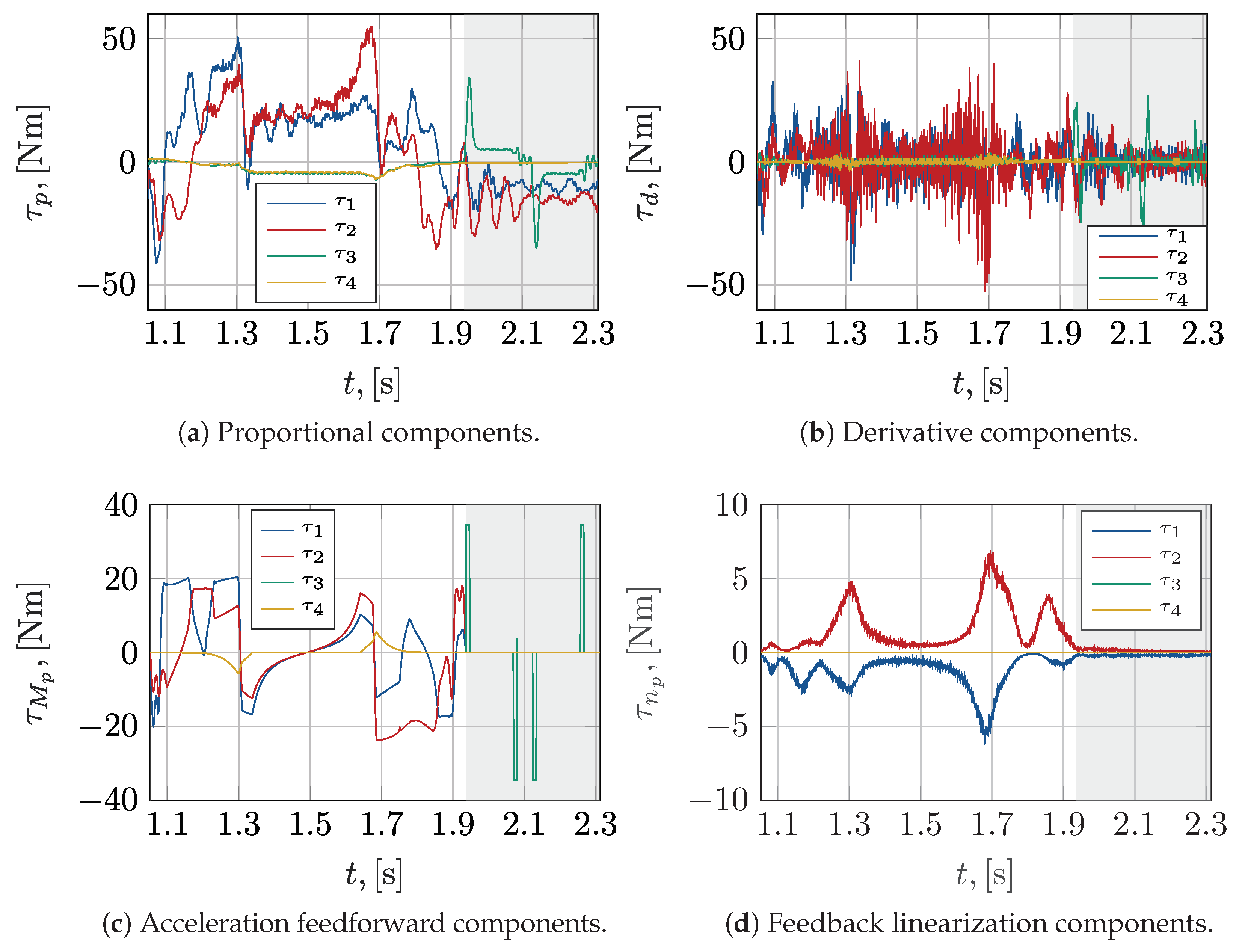
The joint analysis of
Figure 18 and
Figure 19 shows that, quite obviously, the
and
components are, respectively, exactly or practically the same for the TSID and TSIID controllers. The feedback linearization contributions
and
to torques
and
are almost null, and due exclusively to the almost negligible gravitational actions. Conversely,
and
do contribute to torques
and
, but significantly so only in the vicinity of the velocity peaks. Their entity is at any rate lower than the acceleration feedforward components
and
.
Comparing the proportional components of the PD and TSID controllers, and also observing the acceleration feedforward components , it is possible to ascertain that the peak values tend to occur synchronously, in the trajectory portions characterized by high accelerations. The acceleration feedforward components of the TSIDC appear to absorb part of the torque from the proportional terms, leading to the reduction in their peak values. As occurred for the PD regulator, also the proportional torque components of the TSIDC do not coalesce around zero, since position errors attributable to unmodelled friction actions persist also during quasi-stationary conditions.
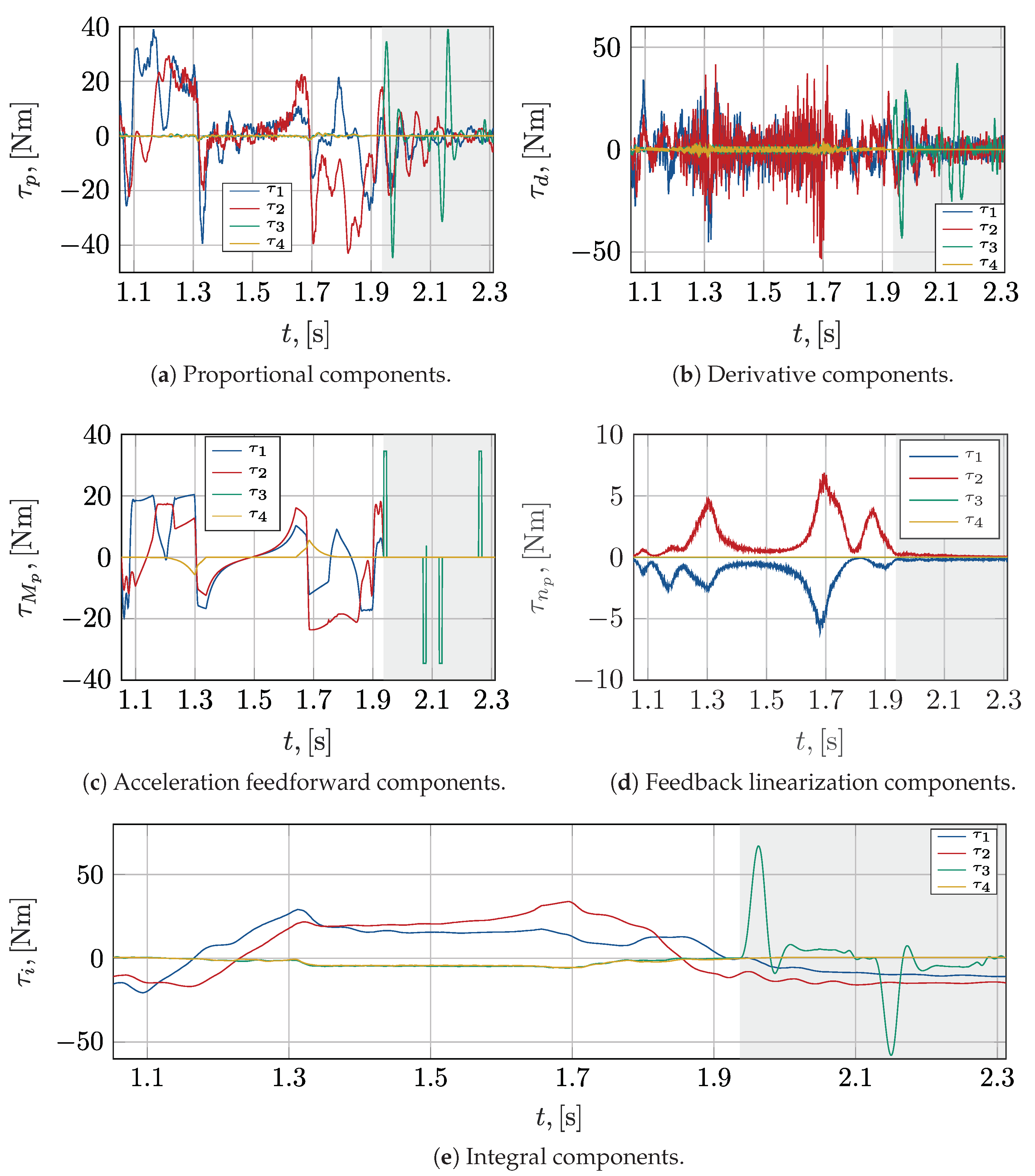
The introduction of the integral terms in the TSIIDC counteracts this effect, as these contributions absorb the low-frequency components of
. The overall supplied torque remains largely unchanged, but the position errors induced by the unmodelled terms that characterize the actual robot’s dynamics are reduced. The adoption of centralized control methods finally appears to reduce the peak values of the components based on the velocity errors.
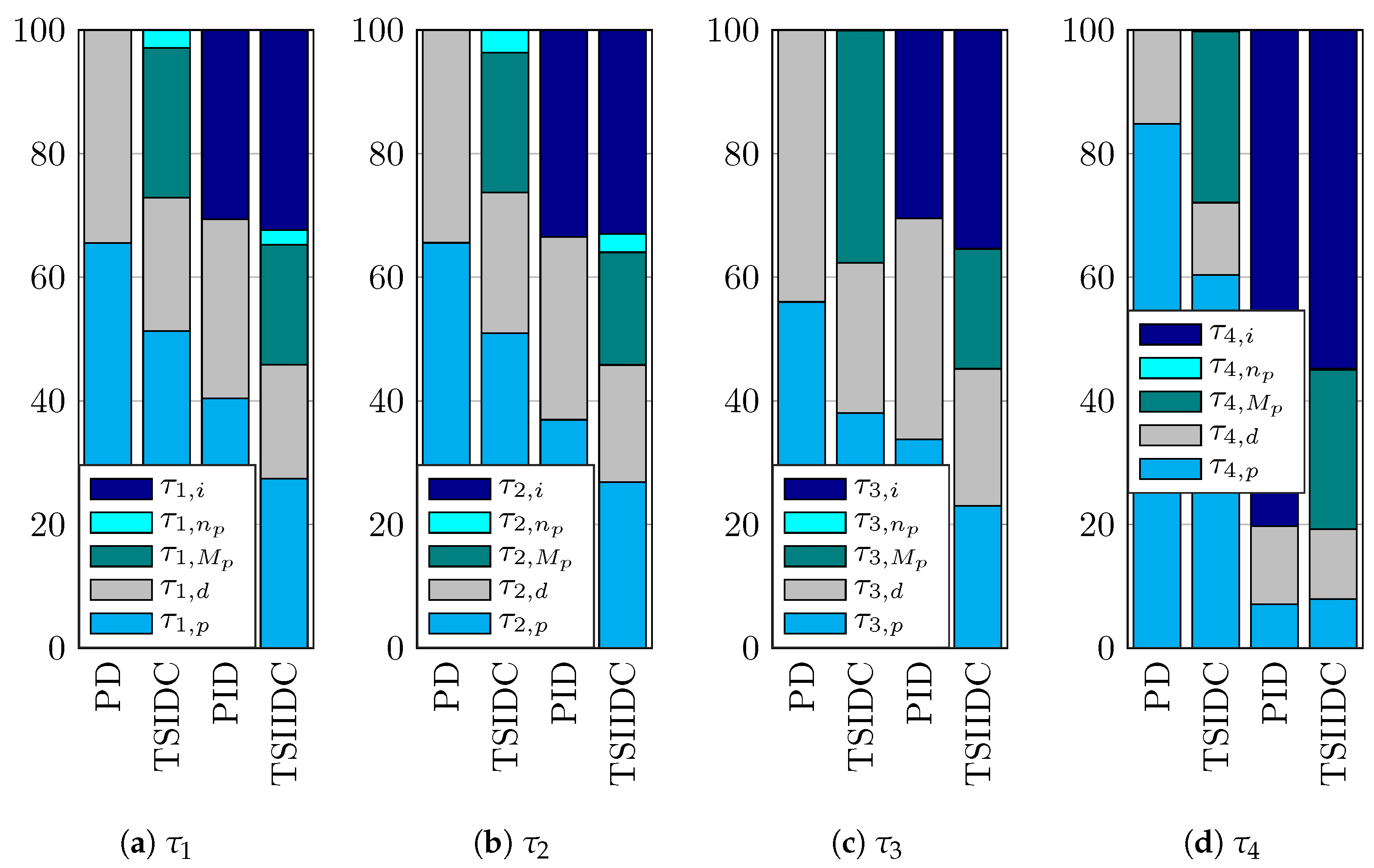
Figure 20 shows how the torque setpoints are divided into the different components at an aggregate level, over the course of the entire workcycle. In particular, the RMS values of each torque component were evaluated, and are expressed in the figure as a percentage of their overall sum. In
Figure 20a,b, which concern, respectively,
and
, almost identical trends can be observed. Going from the PD regulator to the TSID and then to the PID and TSIID controllers, the proportional torque contribution is progressively reduced. The PID and TSIID controllers feature an integral term of roughly equal weight. The feedback linearization terms are of low entity in both the TSIDC and the TSIIDC. Using the PD as the base case, it can be observed that the derivative contributions decrease especially when control centralization is introduced, and conversely, are less affected by additional integral components. Similar considerations can be drawn from
Figure 20c. In
Figure 20d, which concerns the fourth degree of freedom, it is apparent that the integral contribution is especially important whenever it is introduced. In particular, for both the PID and the TSIID controllers, the proportional and derivative terms have a similarly low relevance.
4. Conclusions
In this work, centralized model-based controllers for a 4-DOF parallel kinematic robot are synthesized using the information derived from the mechatronic design of the entire system. Given the availability of an accurate characterization of the geometric and mass properties of the robot, which are established at design time, it is possible to build kinematic and dynamic models useful for control system development and for dynamic performance maximization. A task space formulation of the inverse dynamics control was first adopted and further refined through the introduction of an integral action term. The computational load stemming from the evaluation of the mathematical model of the robot was observed to be compatible with modern commodity hardware, despite the relatively high sampling frequency of . The behaviour of the centralized controllers was experimentally characterized through the execution of a high-speed pick-and-place cycle representative of the robot’s intended use. One peculiarity of this application lies in the wide range of experienced working conditions, which alternate between highly dynamic motions and slower movements in which the accuracy requirements are stringent. Classic PD and PID regulators were also considered as benchmarks.
The TSIDC performed well during the high speed and high acceleration phases, but was unable to bring the errors to zero during the quasi-stationary motions due to disturbances arising from unmodelled friction actions. These were, therefore, counteracted through the introduction of an integral term, yielding the TSIID controller, which was found to be able to operate satisfactorily in both kinds of situation. The PD and PID decentralized regulators were reliably outperformed by their centralized counterparts. Moreover, despite their simple structure, their experimental tuning was found to be time consuming. On the contrary, the synthesis of the TSID and TSIID controllers required an undeniably more complex implementation, which, however, finds a natural collocation within the overall design of the mechatronic system. Once developed, moreover, their free parameters were tuned with lower effort thanks to their clear interpretability.
Based on these considerations, it can be stated that, for applications similar to the one presented in this paper, the use of a centralized controller and, in particular, of a TSIID controller, allows the system to achieve high positioning performances both in high dynamics operations and in semi-stationary conditions. The adoption of centralized controllers in general appears particularly advantageous whenever a high-confidence estimate of the main system parameters is available as a by-product of the device design process.
Moreover, the proposed investigation highlighted the several components that contribute to the control torques. The results show that, in general, the centralized control actions account for a sizable part of the overall generated torque, and are especially beneficial for the reduction in the peak errors; moreover, the integral action introduced within the TSIIDC also has a relevant weight and leads to significantly lower RMS errors. These findings suggest that while the inertial effects have been successfully compensated thanks to the dynamic model of the system, the friction actions are non-negligible terms within the actual mechanical dynamics. The authors therefore plan to specifically investigate this issue, with the overall goal of providing an alternative to the integral torque components in the form of a suitably derived friction model.


 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}