Position Estimation of Small Robotic Fish Based on Camera Information and Gyro Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Robotic Fish FOCUS
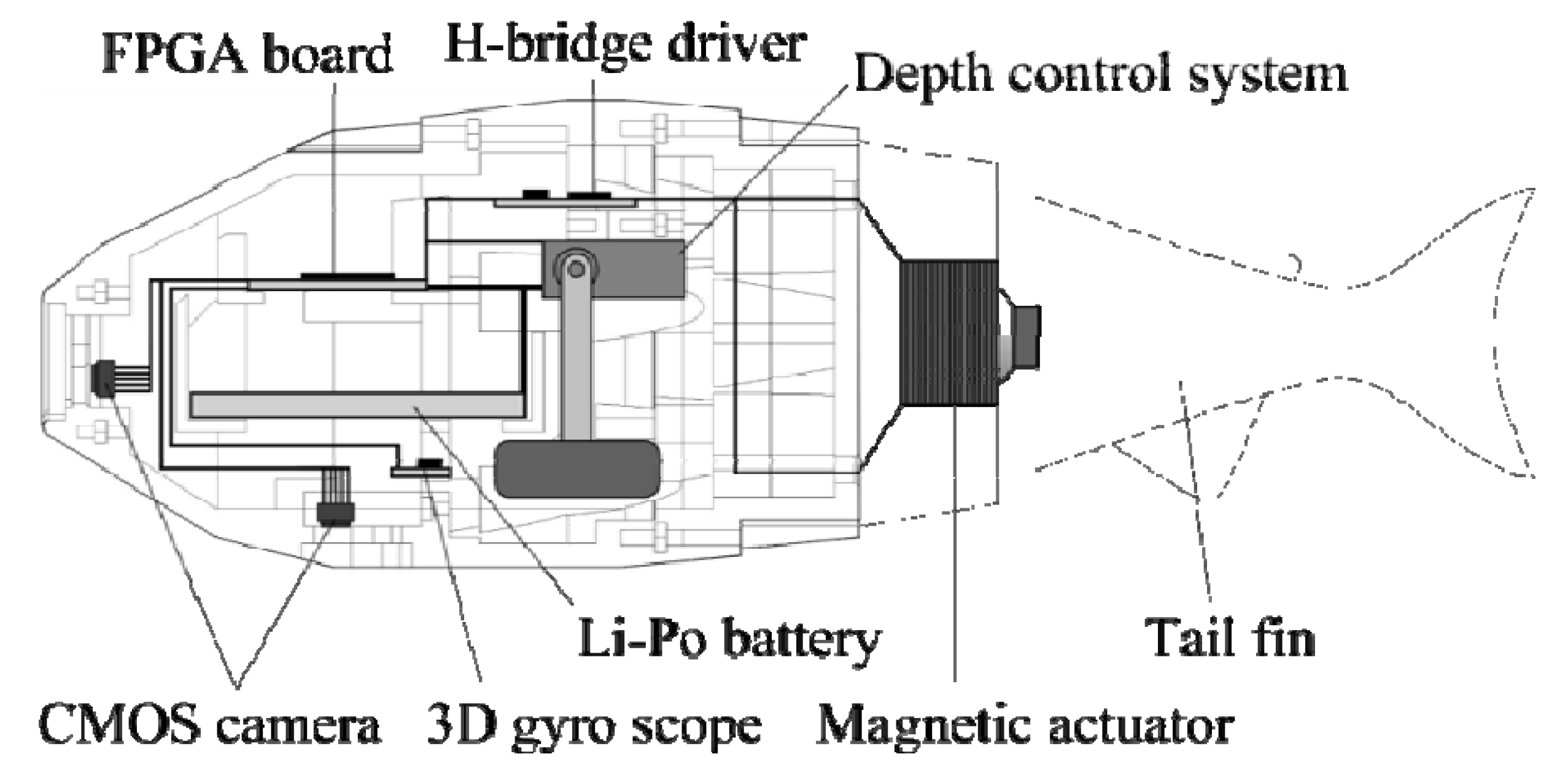
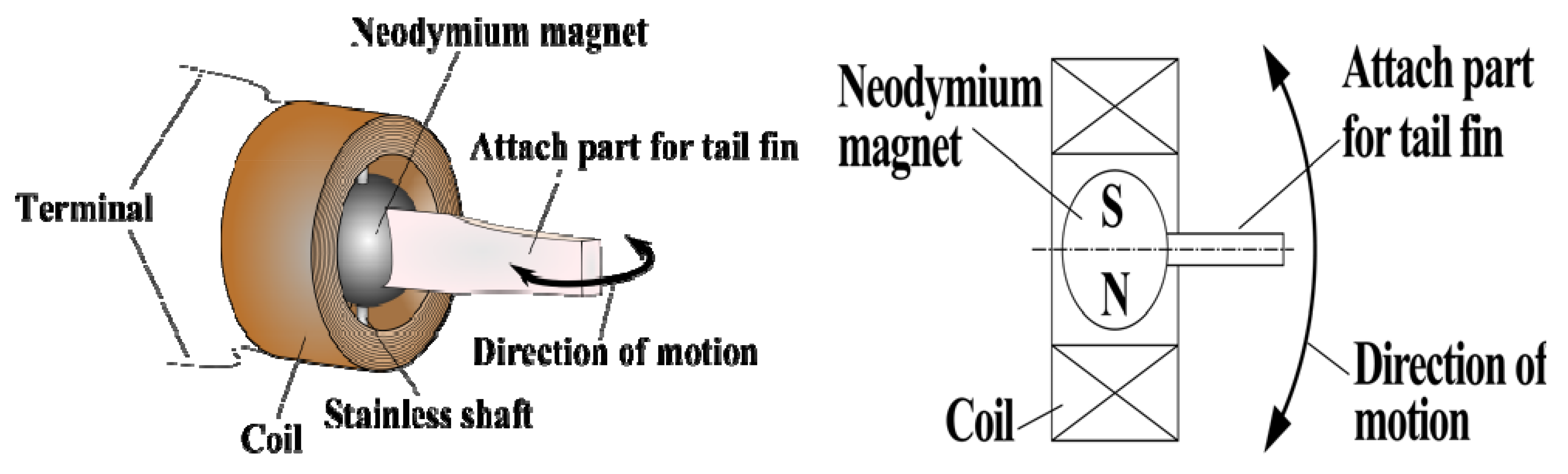
2.1. Structure of FOCUS




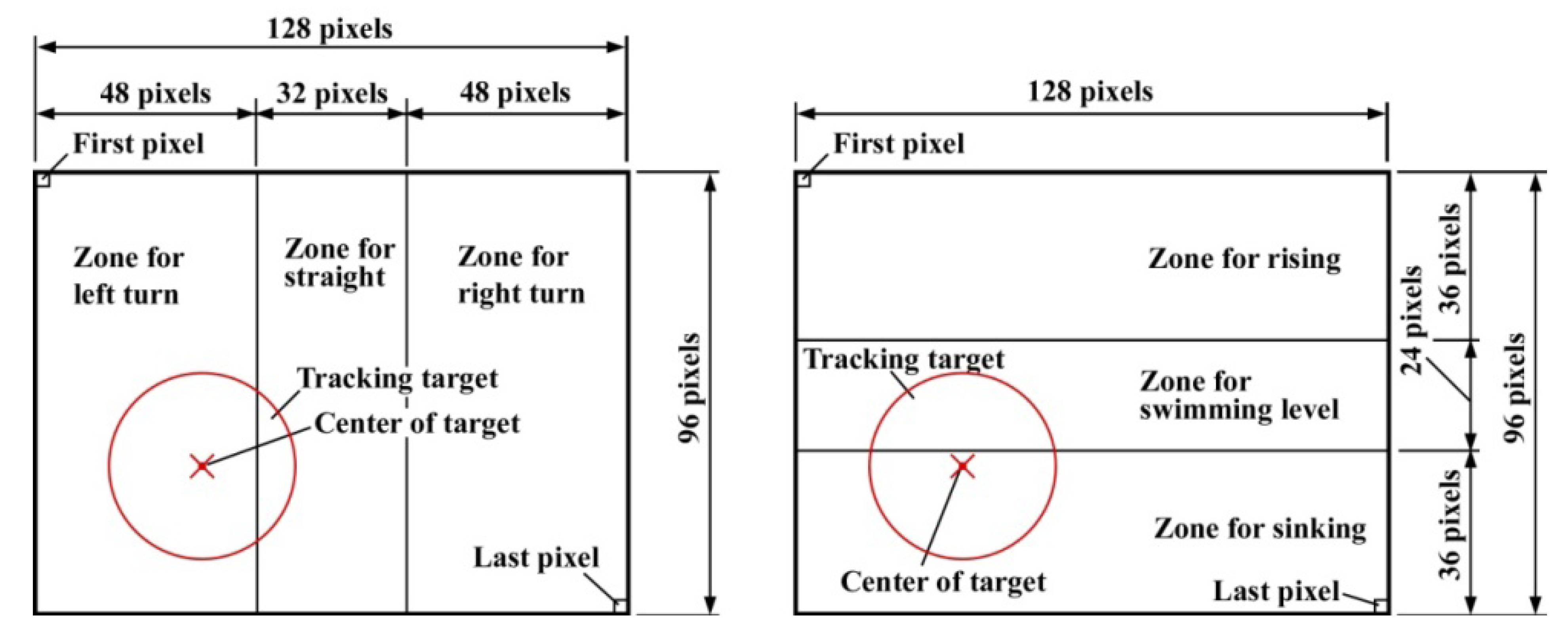
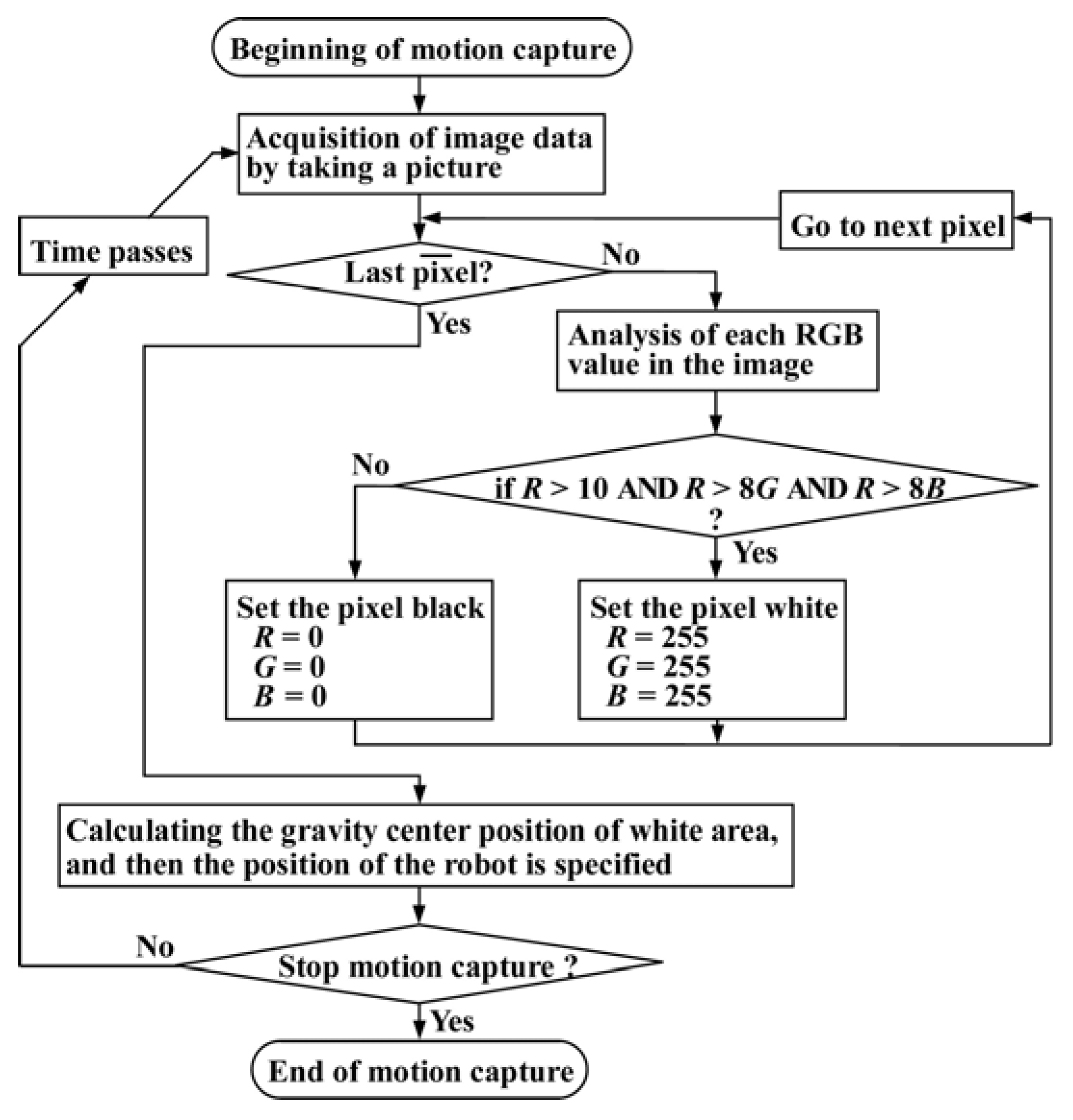
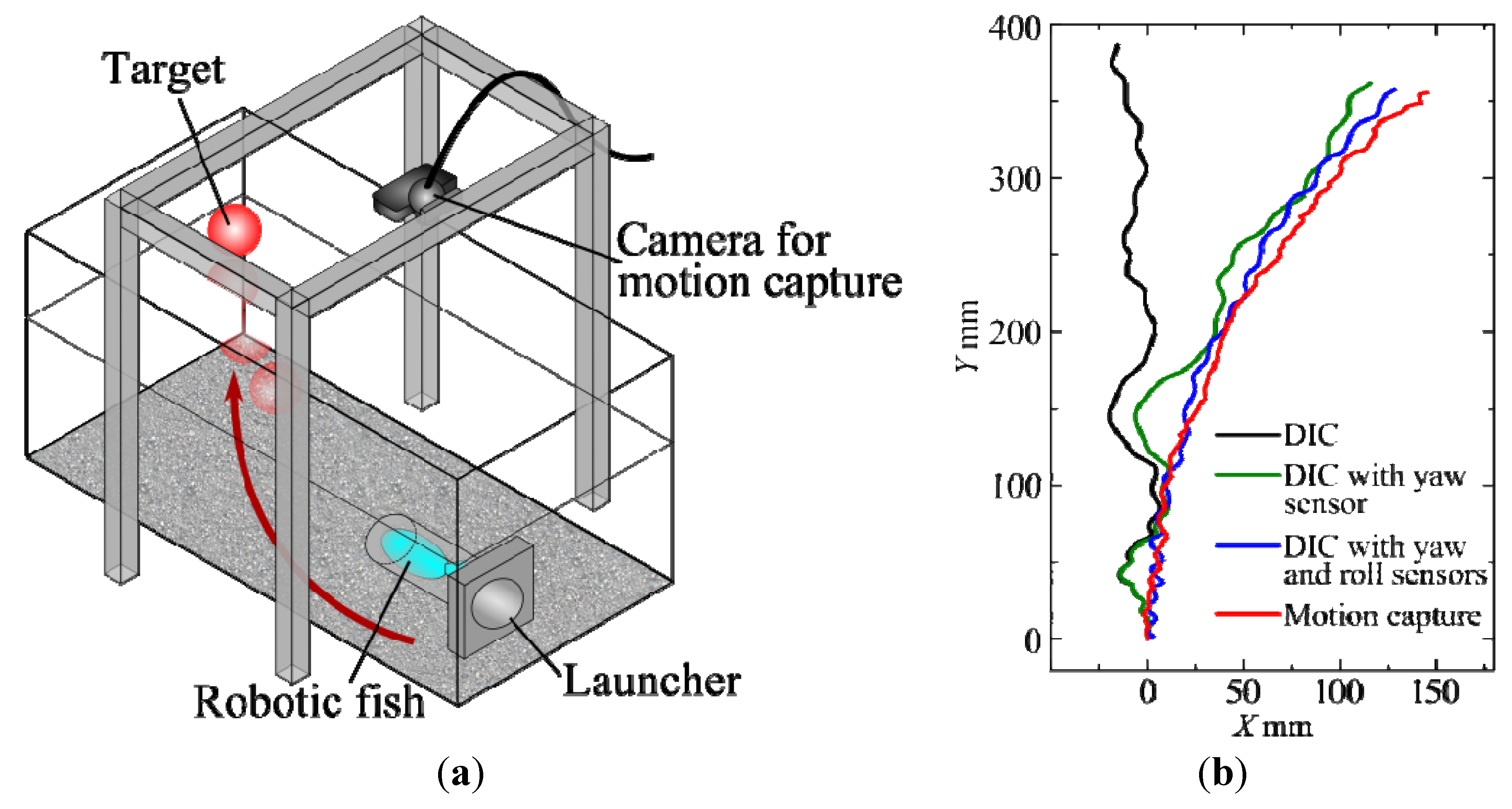
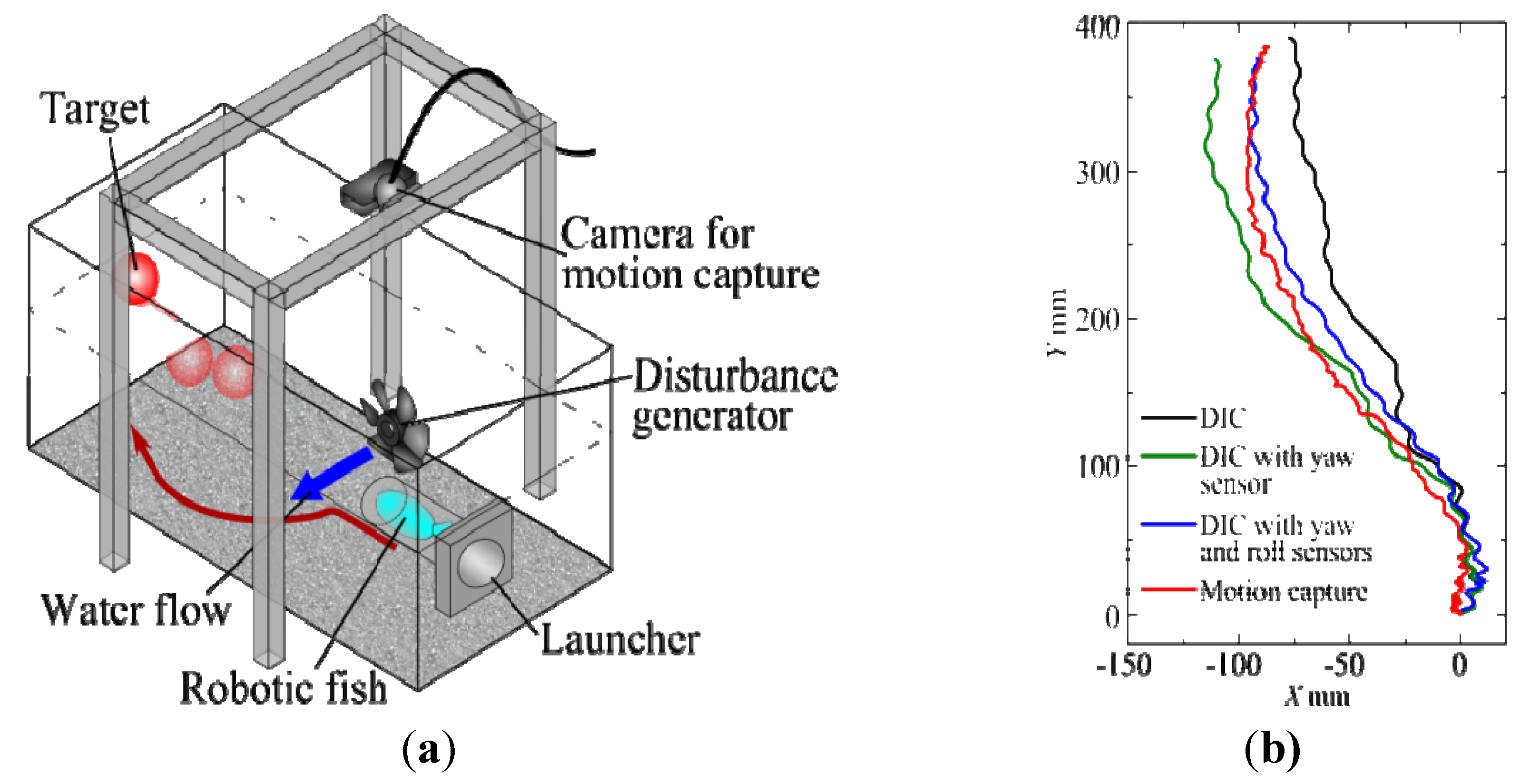
2.2. Target Tracking Method


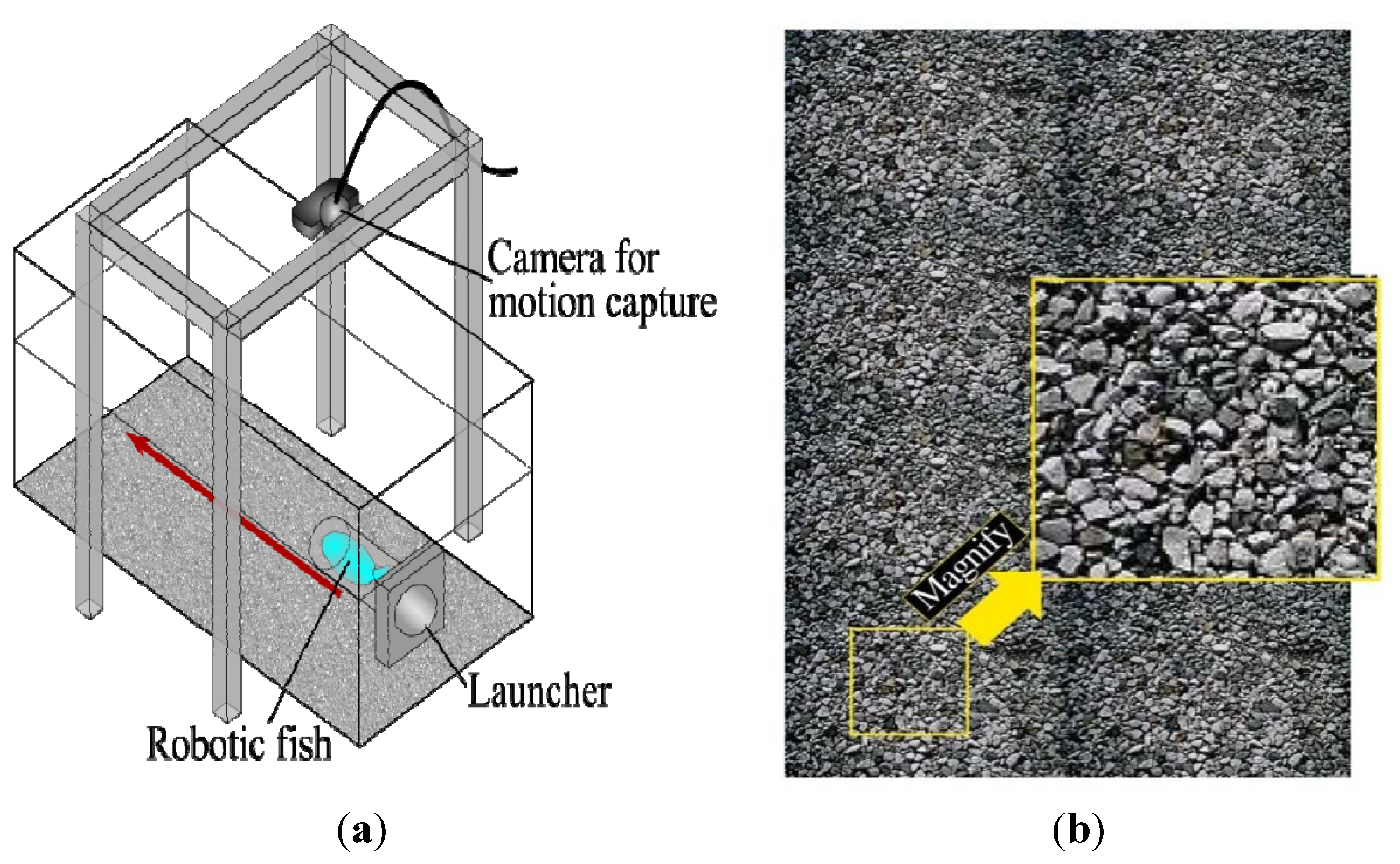
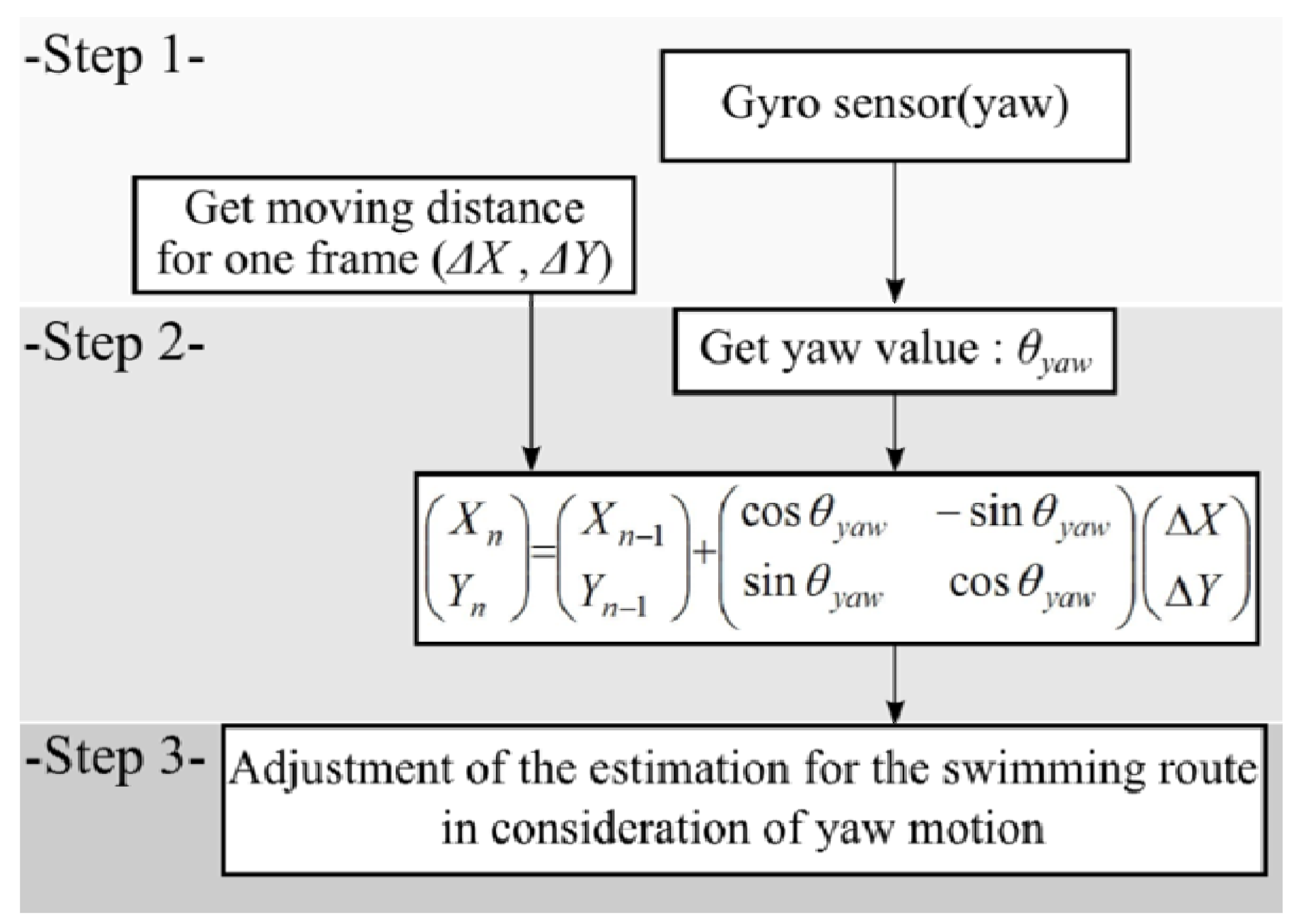
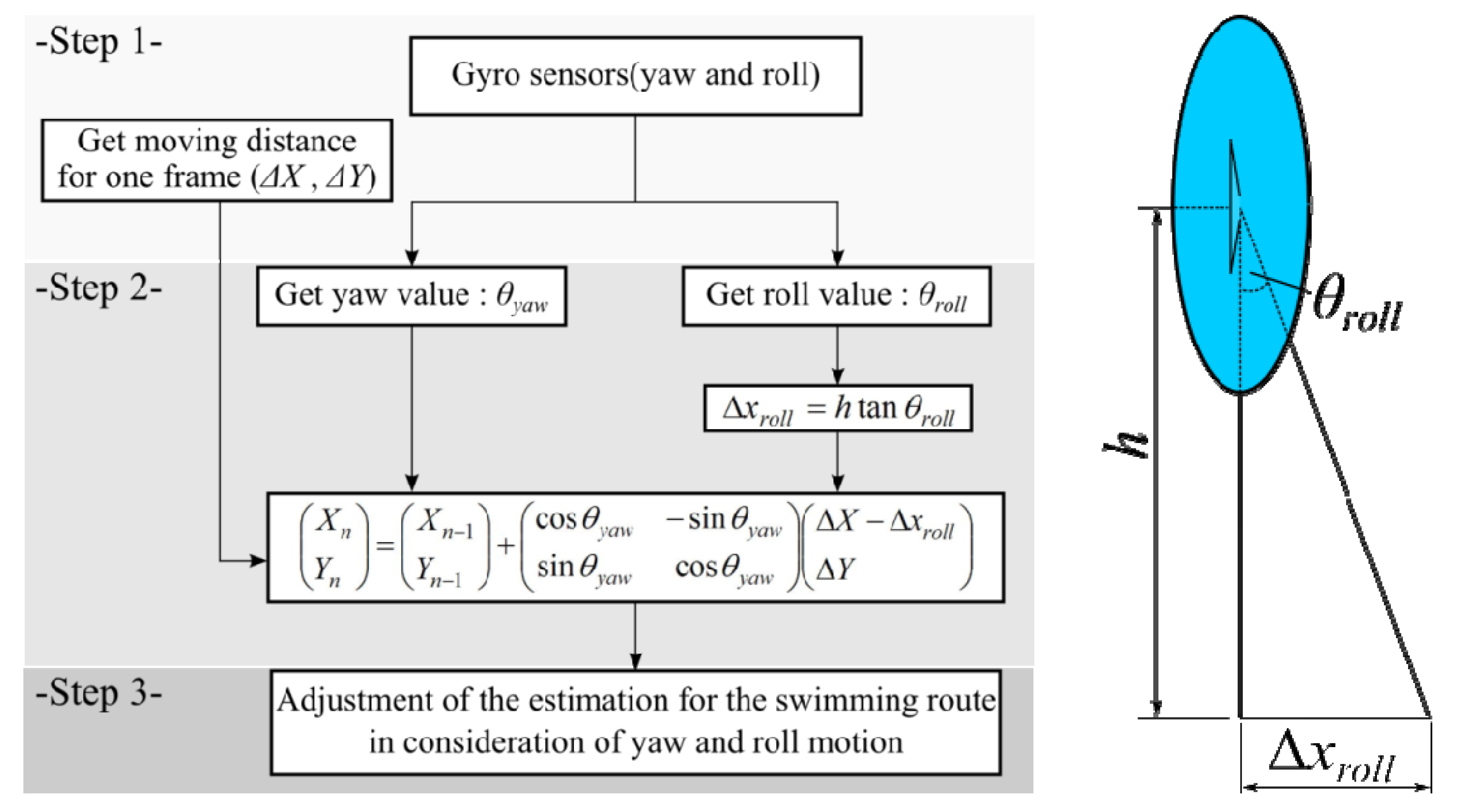
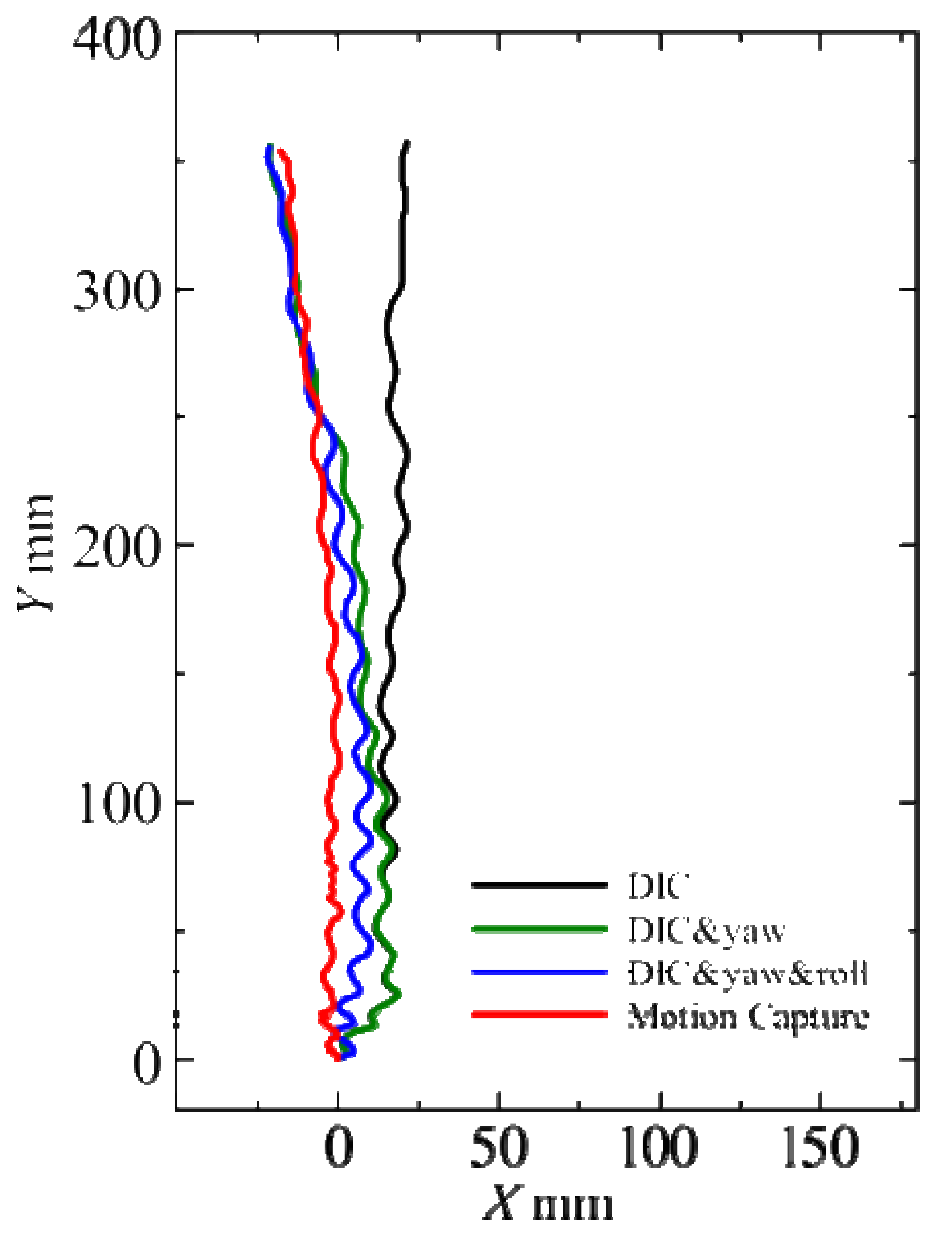
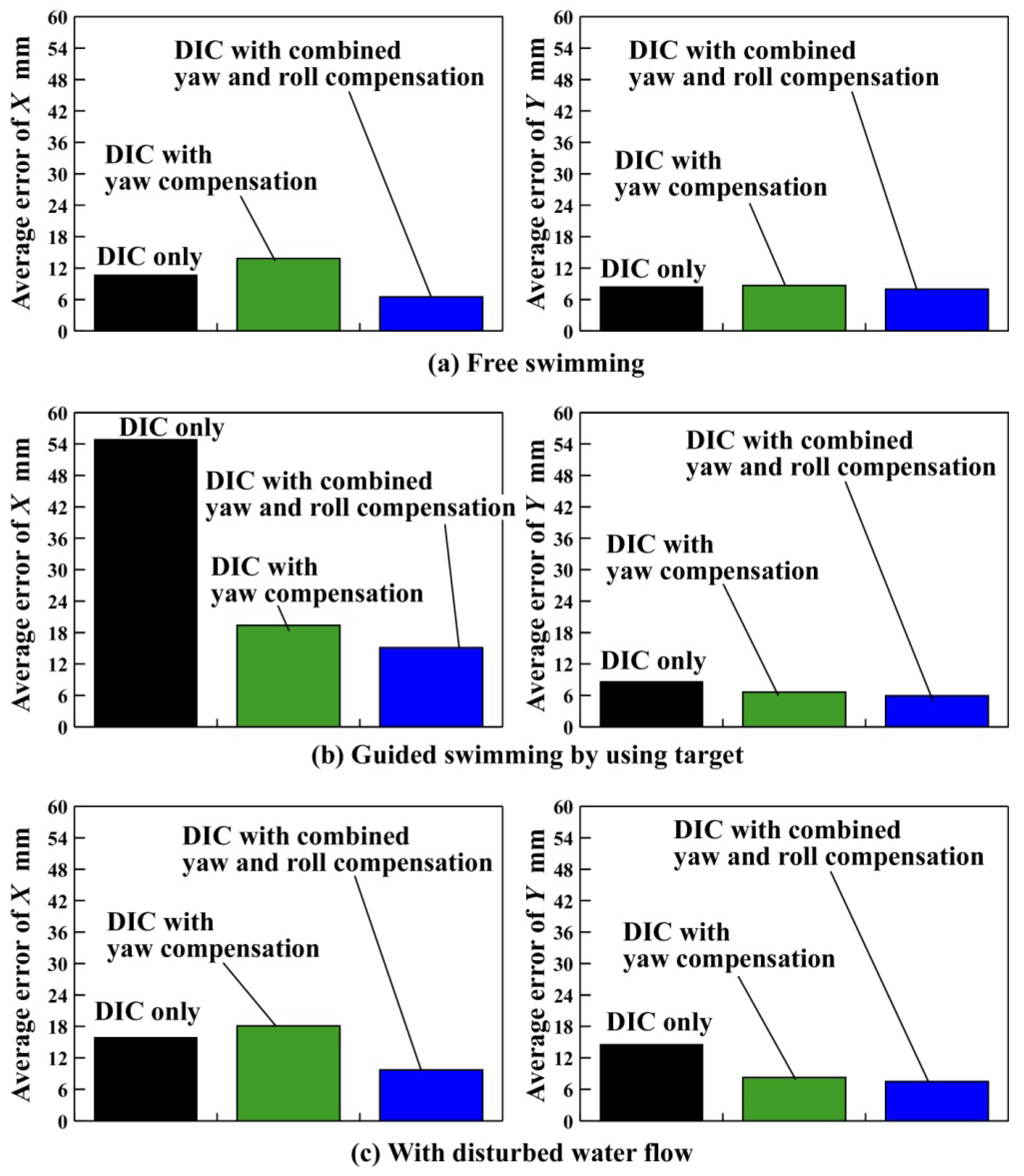
3. Position Estimation










4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hirata, K.; Takimoto, T.; Tamura, K. Study on turning performance of a fish robot. In Proceedings of the 1st International Symposium on Aqua Bio-Mechanisms, Honolulu, HI, USA, 28–30 August 2000; pp. 287–292.
- Nakashima, M.; Kaminaga, K.; Ono, K. Experimental study of two-joint dolphin robot (propulsive characteristics of 2nd large model). In Proceedings of the International Symposium on Aqua Bio-Mechanisms, Honolulu, HI, USA, 28–30 August 2000; pp. 311–314.
- Toda, Y.; Ikeda, H.; Sogihara, N. The motion of fish-like under-water vehicle two undulating side fins. In Proceedings of the 3rd International Symposium on Aqua Bio-Mechanisms, Okinawa, Japan, 3–7 July 2006.
- Kobayashi, S.; Nakabayashi, M.; Morikawa, H. Bioinspired propulsion mechanism in fluid using fin with dynamic variable-effective-length spring. J. Biomech. Sci. Eng. 2006, 1, 280–289. [Google Scholar] [CrossRef]
- Yamamoto, I. Research and development of robotic fish. J. JIME 2008, 43, 99–102. [Google Scholar] [CrossRef]
- Low, K.H. Modelling and parametric study of modular undulating fin rays for fish robots. Mech. Mach. Theory 2009, 44, 615–632. [Google Scholar] [CrossRef]
- Takada, Y.; Araki, R.; Nonogaki, M.; Ebita, K.; Ishii, T.; Wakisaka, T. Development of small and ultra-light passive-type polymer electrolyte fuel cell and application to small fish robots. Trans. Jpn. Soc. Mech. Eng. Ser. B 2010, 76, 650–659. [Google Scholar]
- Takada, Y.; Araki, R.; Nakanishi, Y.; Nonogaki, M.; Ebita, K.; Wakisaka, T. Development of small fish robots powered by small and ultra-light passive-type polymer electrolyte fuel cells. J. Robot. Mechatron. 2010, 22, 150–157. [Google Scholar]
- Takada, Y.; Masuda, H.; Tajiri, T.; Wakisaka, T. Development of small fish robot with built-in fuel cells. In Proceedings of the Techno-Ocean, Kobe, Japan, 27 July 2010.
- Techno-Ocean 2010 Pre Event, Ocean Science Seminar, Amazing World of Aqua Bio Mechanics. Available online: http://www.marine.osakafu-u.ac.jp/~lab06/pre-event/ (accessed on 28 January 2014).
- Asakawa, K.; Kojima, J.; Ito, Y.; Takagi, S.; Shirasaki, Y.; Kato, N. Autonomous underwater vehicle AQUA EXPLORER 1000 for inspection of underwater cables. In Proceedings of the AUV’96, Monterey, CA, USA, 2–6 June 1996.
- Ura, T. Construction of AUV R2D4 based on the success of full-autonomous exploration of Teisi Knoll by R-one robot. In Proceedings of the AUV Show Case, New Maiden, UK, 27–28 September 2002; pp. 23–28.
- Maeda, T.; Ishiguro, S.; Yokoyama, K.; Hirokawa, K.; Hashimoto, A.; Okuda, Y.; Tani, T. development of fuel cell AUV “URASHIMA”. Mitsubishi Heavy Ind. Tech. Rev. 2004, 41, 344–347. [Google Scholar]
- Nakatani, T.; Ura, T.; Ito, Y.; Kojima, J.; Tamura, K.; Sakamaki, T.; Nose, Y. AUV “TUNA-SAND” and its Exploration of hydrothermal vents at Kagoshima Bay. In Porceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008.
- Hyakudome, T.; Furuyama, H.; Baba, T.; Kasaya, T.; Oomika, S.; Ishibashi, S.; Yoshida, H.; Tsukioka, S.; Matsuura, M.; Aoki, T. The Seafloors Which AUV “URASHIMA” Watched. Available online: http://jairo.nii.ac.jp/0153/00013762/en (accessed on 15 March 2014).
- Sakagami, N.; Ibata, D.; Ikeda, T.; Shibata, M.; Ueda, T.; Ishimaru, K.; Onishi, H.; Murakami, S.; Kawamura, S. Development of a removable multi-DOF manipulator system for man-portable underwater robots. In Proceedings of the 21th International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011; pp. 279–284.
- Takada, Y.; Nakanishi, Y.; Araki, R.; Wakisaka, T. Investigation of propulsive force and water flow around a small fish robot by PIV Measurement and three-dimensional numerical analysis. Trans. Jpn. Soc. Mech. Eng. Ser. C 2010, 76, 665–672. [Google Scholar]
- Takada, Y.; Nakanishi, Y.; Araki, R.; Nonogaki, M.; Wakisaka, T. Effect of material and thickness about tail fins on propulsive performance of a small fish robot. J. Aero Aqua Bio-Mech. 2010, 1, 51–56. [Google Scholar] [CrossRef]
- Takada, Y.; Araki, R.; Ochiai, T.; Tajiri, T.; Wakisaka, T. Effects of tail fin flexibility on propulsive performance in small fish robots (investigation by fluid-structure interaction analysis considering elastic deformation of tail fin). Trans. Jpn. Soc. Mech. Eng. Ser. C 2011, 77, 2351–2362. [Google Scholar] [CrossRef]
- Takada, Y.; Ochiai, T.; Fukuzaki, N.; Tajiri, T.; Wakisaka, T. Analysis of flow around robotic fish by three-dimensional fluid-structure interaction simulation and evaluation of propulsive performance. J. Aero Aqua Bio-Mech. 2013, 3, 57–64. [Google Scholar] [CrossRef]
- Takada, Y.; Fukuzaki, N.; Ochiai, T.; Tajiri, T.; Wakisaka, T. Evaluation of artificial caudal fin for fish robot with two joints by using three-dimensional fluid-structure simulation. Adv. Mech. Eng. 2013, 2013. ID:310432. [Google Scholar] [CrossRef]
- Takada, T.; Nakamura, T.; Koyama, K.; Tajiri, T. Target following control of small fish robot FOCUS based on color information. Trans. Jpn. Soc. Mech. Eng.Ser. C 2012, 78, 2924–2934. [Google Scholar] [CrossRef]
- Takada, Y.; Nakamura, T.; Koyama, K.; Wakisaka, T. Self-position estimation of small fish robot based on visual information from camera. J. Jpn. Inst. Mar. Eng. 2012, 47, 138–146. [Google Scholar]
- Takada, Y.; Nakamura, T.; Koyama, K.; Fukuzaki, N.; Tajiri, T.; Wakisaka, T. Target following and self-position estimation of small fish robot FOCUS. J. Jpn. Inst. Mar. Eng. 2012, 47, 108–113. [Google Scholar]
- Kawasue, K.; Ishimatsu, T.; Shih, C. Fast correlation technique of particle image velocimetry. Trans. Jpn. Soc. Mech. Eng. Ser. C 1994, 60, 2084–2089. [Google Scholar] [CrossRef]
- Uneda, M.; Murata, S.; Narise, T.; Yamazaki, T.; Ohnishi, O.; Kurokawa, S.; Ishikawa, K.; Doi, T. Quantitative evaluation of slurry flow behavior using digital image processing. Trans. Jpn. Soc. Mech. Eng. Ser. C 2011, 77, 3891–3903. [Google Scholar] [CrossRef]
- Maki, T.; Kondo, H.; Ura, T.; Sakamaki, T. AUVnavigation with particle filter. Month. J. Inst. Industrial Sci. 2004, 56, 429–433. [Google Scholar]
- Eriguchi, Y.; Ishii, K.; Watanabe, K. An underwater sound source localization system using probabilistic methods. Dyn. Des. Conf. 2009, 11, 244–247. [Google Scholar]
- Tajiri, T.; Takada, Y.; Takada, M.; Kawai, T. Movement control including localization for a wheeled mobile robot. In Proceedings of the 16th Asia Pacific Symposium on Intelligent and Evolutionary Systems, Kyoto, Japan, 13–14 December 2012; pp. 3–6.
- Gray, J. Studies in Animal Locomotion, VI. The Propulsive Power of the Dolphin. J. Exp. Biol. 1935, 13, 192–199. [Google Scholar]
- Lighthill, M.J. Note on the swimming of slender fish. J. Fluid Mech. 1960, 9, 305–317. [Google Scholar] [CrossRef]
- Lighthill, M.J. Aquatic animal propulsion of high hydrodynamical efficiency. J. Fluid Mech. 1970, 44, 265–301. [Google Scholar] [CrossRef]
- Nagai, M.; Teruya, I.; Uechi, K.; Miyazato, T. Study on an oscillating wing propulsion mechanism. Trans. JSME, Ser. B 1996, 62, 200–206. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Takada, Y.; Koyama, K.; Usami, T. Position Estimation of Small Robotic Fish Based on Camera Information and Gyro Sensors. Robotics 2014, 3, 149-162. https://doi.org/10.3390/robotics3020149
Takada Y, Koyama K, Usami T. Position Estimation of Small Robotic Fish Based on Camera Information and Gyro Sensors. Robotics. 2014; 3(2):149-162. https://doi.org/10.3390/robotics3020149
Chicago/Turabian StyleTakada, Yogo, Keisuke Koyama, and Takahiro Usami. 2014. "Position Estimation of Small Robotic Fish Based on Camera Information and Gyro Sensors" Robotics 3, no. 2: 149-162. https://doi.org/10.3390/robotics3020149
APA StyleTakada, Y., Koyama, K., & Usami, T. (2014). Position Estimation of Small Robotic Fish Based on Camera Information and Gyro Sensors. Robotics, 3(2), 149-162. https://doi.org/10.3390/robotics3020149