Hexapods with Plane-Symmetric Self-Motions


Abstract
:1. Introduction
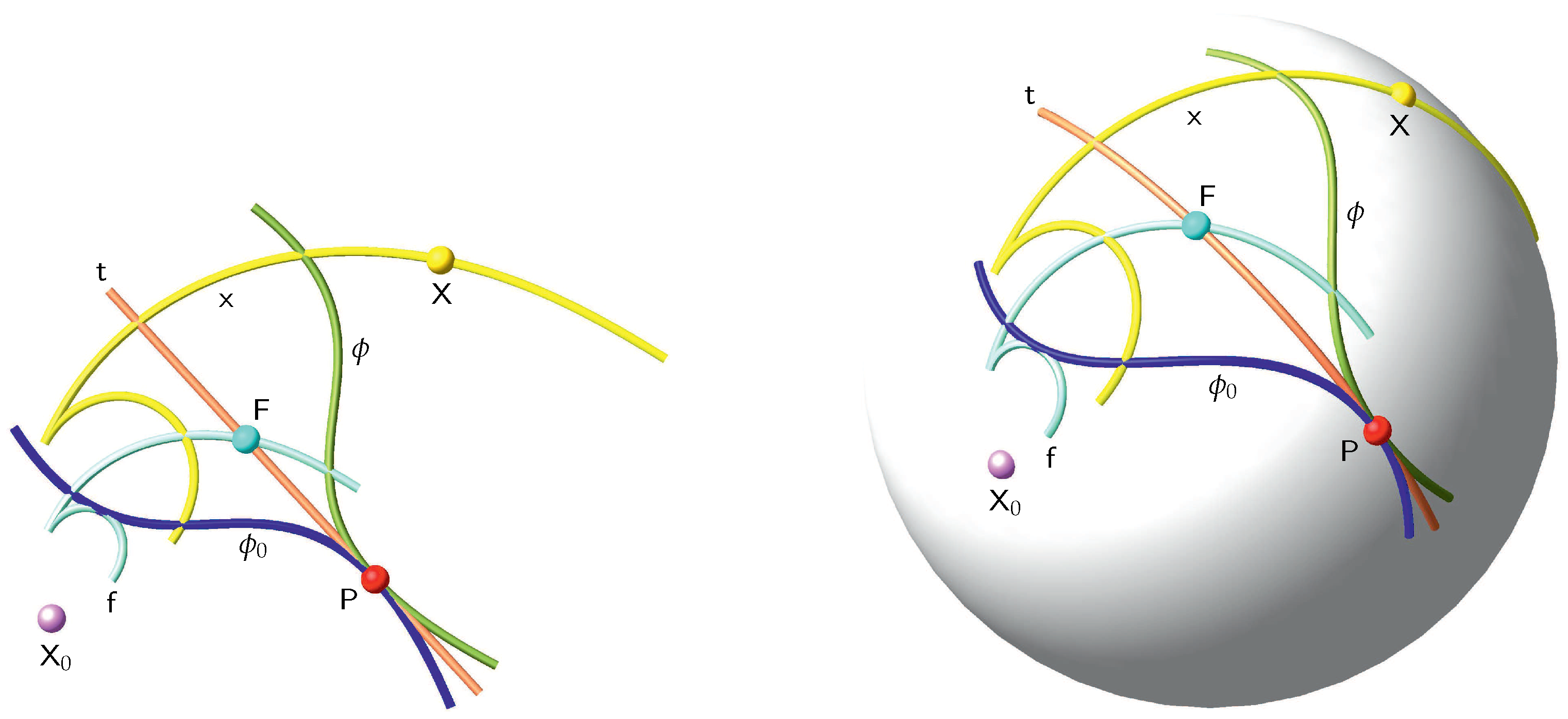
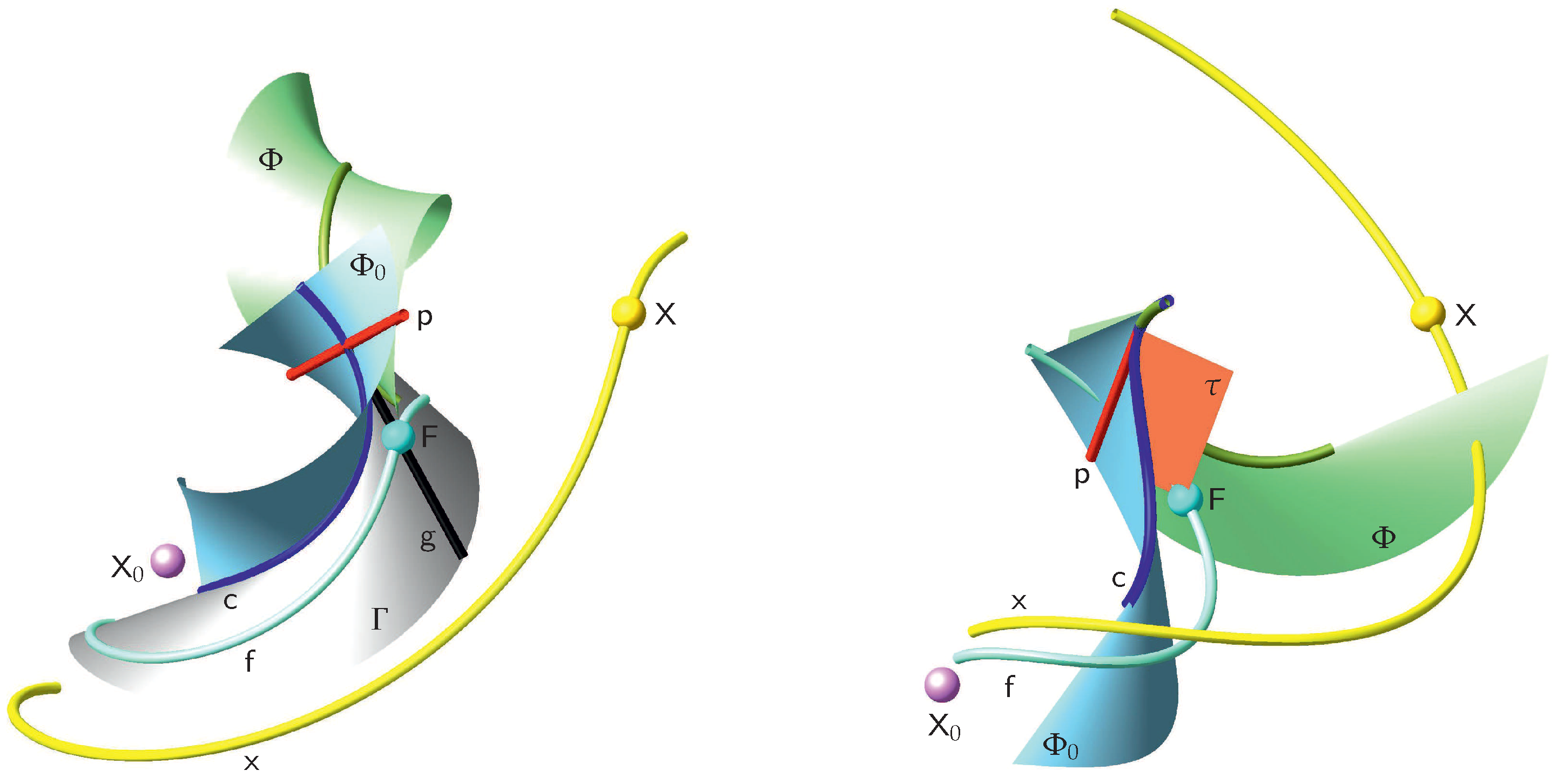
- Darboux noted in [5] (No. 61) a 2-parametric spatial motion, which is generated by the rolling of a moving surface on an indirect congruent fixed surface . It also holds that the path-surface of a point can be generated by the reflexion of a point of the fixed system on each tangent-plane of ; for example, the path-surface can be obtained by a central doubling of ’s pedal-surface with respect to ’s tangent-planes.
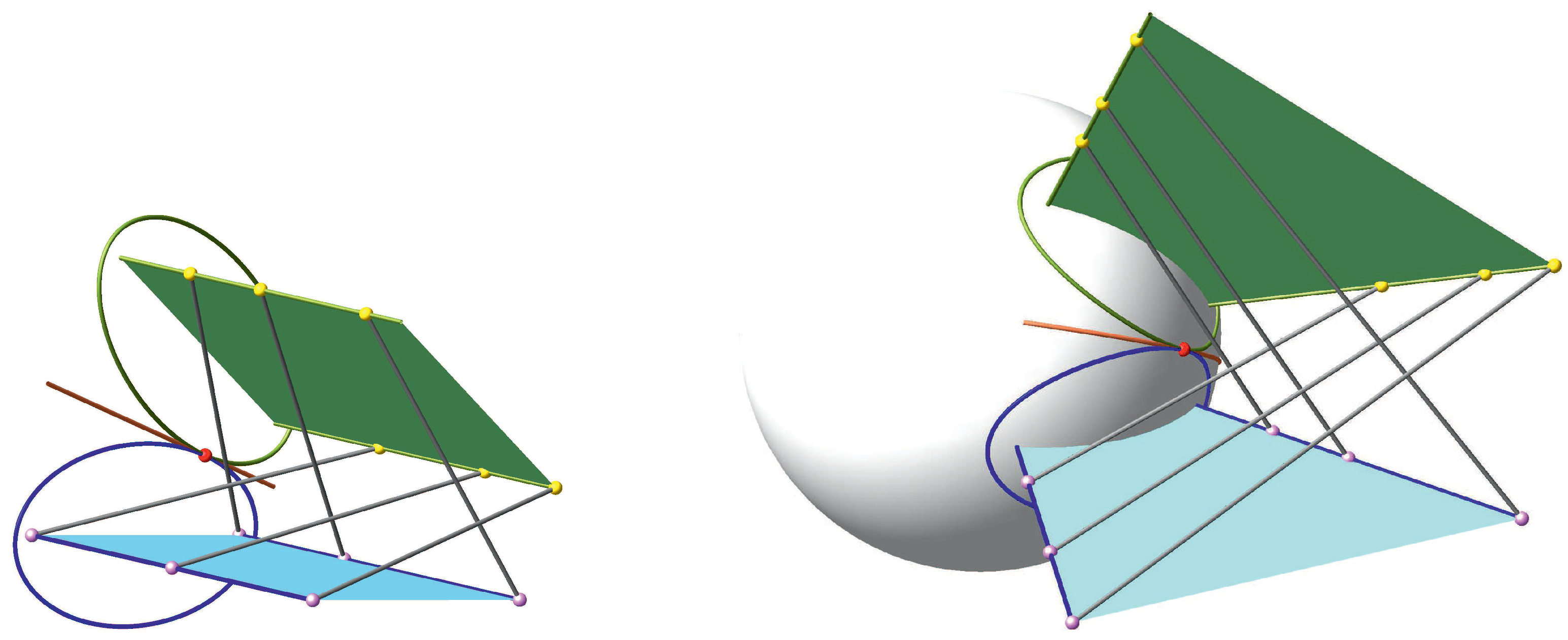
- Krames [6] considered the so-called line-symmetric motion as the 1-parametric spatial analogue of the planar/spherical symmetric rolling. These motions are obtained by reflecting the moving system in a 1-parametric continuous set of lines, which form the so-called basic surface (cf. Figure 2, left). Krames reasoned this by the fact that the path of a point under a line-symmetric motion can be generated by the reflexion of a point on each generator of ; for example, can be obtained by a central doubling of ’s pedal-curve with respect to ’s rulings. However, it should be pointed out that differs from the fixed axode (generated by the central tangents of ). However, and the moving axode are at each time instant symmetric with respect to the axis of the instantaneous screw, which is in general not an instantaneous rotation. For further details and references on this motion type, please see [7,8] (§7 of Ch. 4) and [9].
- It is astonishing that neither Tölke [2] (Section 3.1) nor Krames [6] (p. 394) mentioned the more apparent generalization by reflecting the fixed system in a 1-parametric continuous set of planes. Less attention was paid to these so-called plane-symmetric motions in the literature until now. We summarize the known results in the next section.
1.1. Review on Plane-Symmetric Motions
1.2. Motivation and Outline
- Assumptions on the geometry of the platform and base; e.g.,
- (a)
- (b)
- (c)
- special topology (e.g., octahedral structure [25]),
- Assumptions on the self-motion; e.g.,
2. Preliminary Considerations and Preparatory Work
2.1. Planar/Spherical Symmetric Rollings with Circular Paths
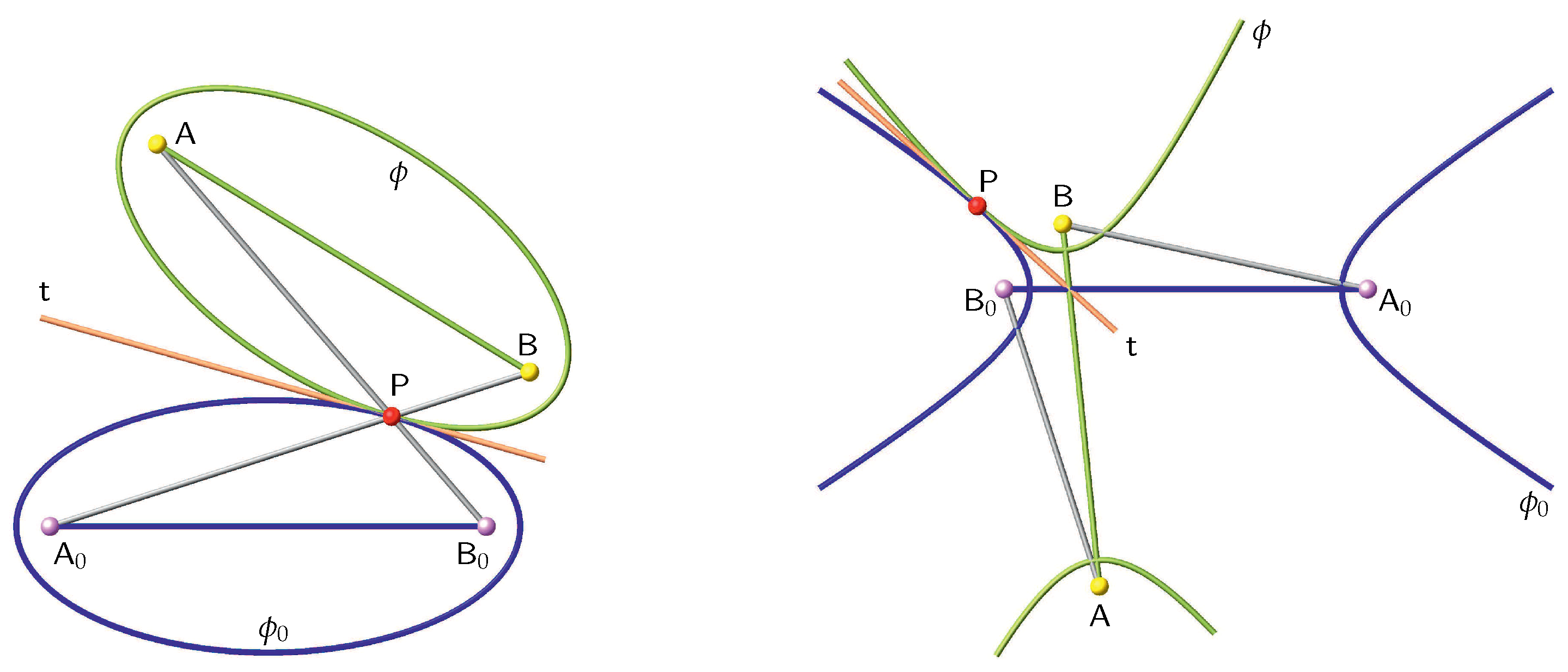
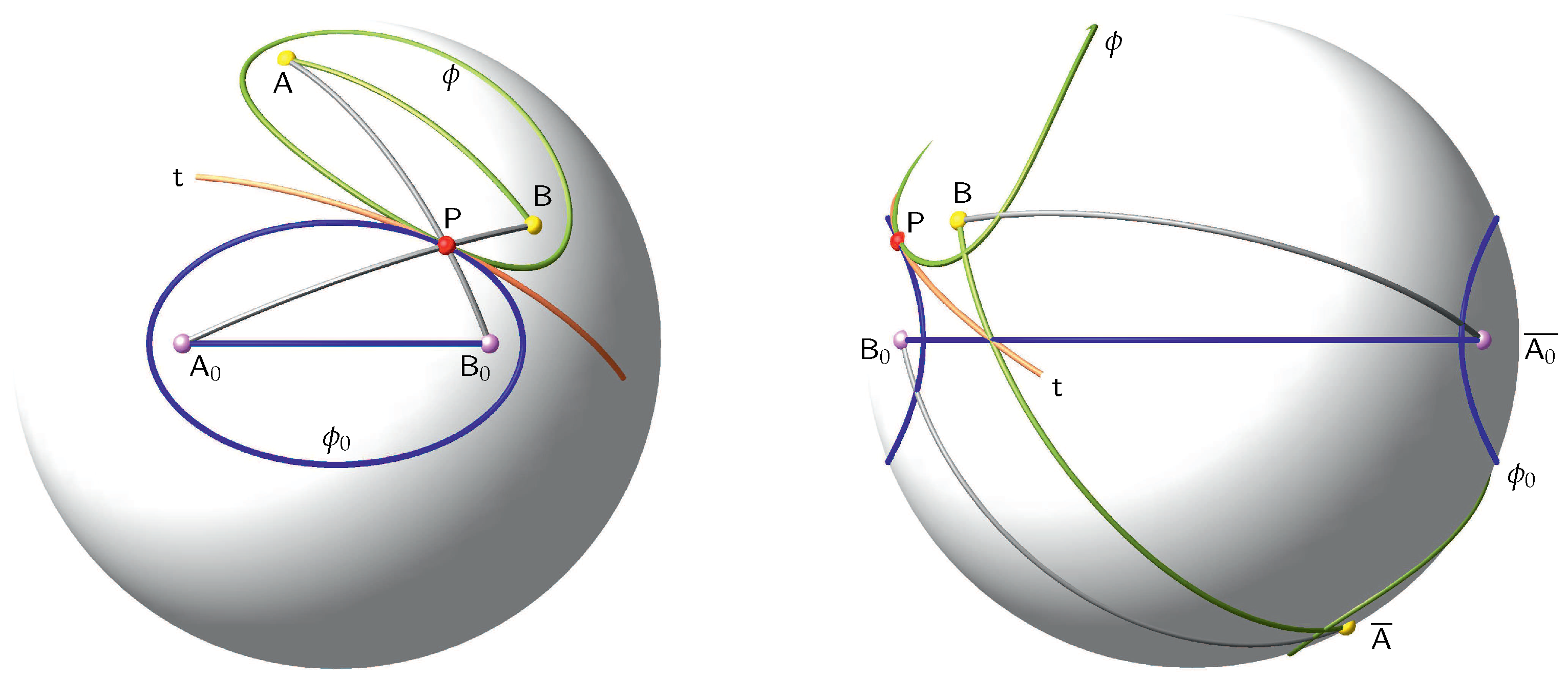
- The planar symmetric rolling motions with points running on circular paths are well known due to the study of Bereis [3]. In this case, the polodes are either ellipses or hyperbolas and the focals (two real, two complex) of the moving ellipse/hyperbola are running on circles. They are the Burmester points of this motion. These motion can be realized by the mechanisms illustrated in Figure 3.
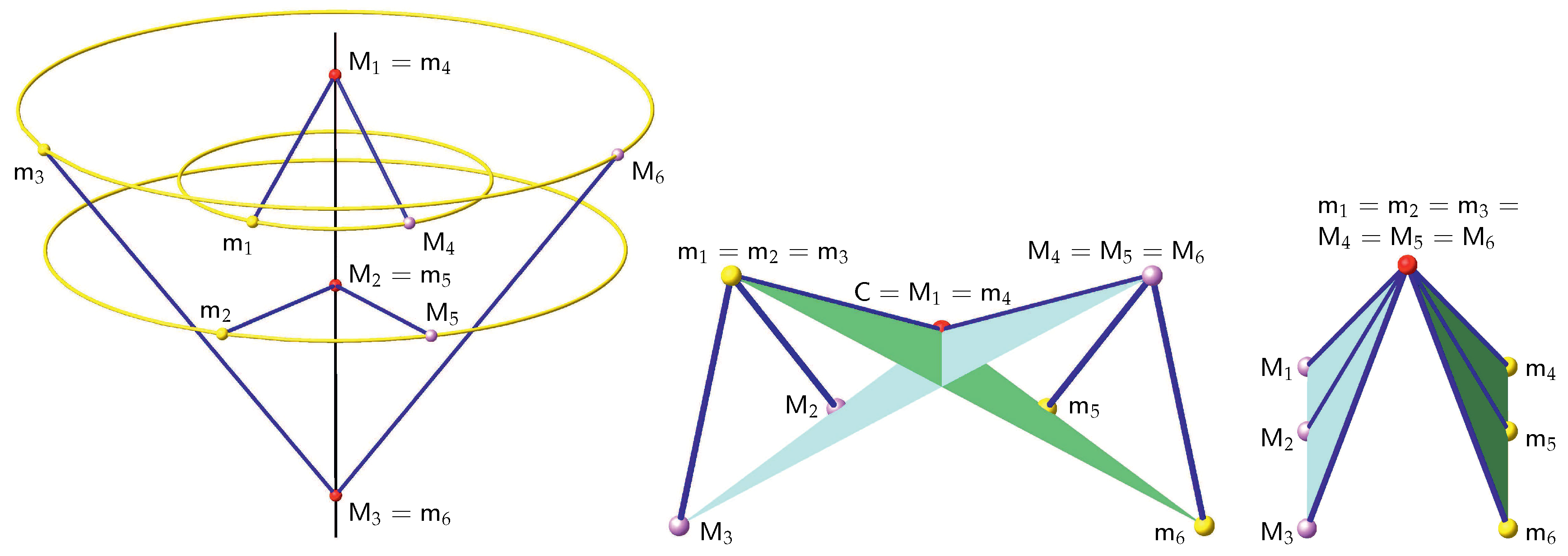
- Unfortunately, the considerations of Bereis cannot be generalized straightforward to the sphere (cf. [2] (p. 195)), as in spherical kinematics six Burmester points exist (e.g., [8] (p. 216)). However, we can do the reasoning in a different way. Due to [28] (Theorem 6), one can assume without loss of generality that only two points of a moving body can have spherical trajectories. According to the spherical version of Theorem 1, a second point is also running on a circle due to the symmetric leg-replacement (With the exceptional case that the first leg is orthogonal to the pole tangent, but this will not yield a closed loop; i.e., a spherical parallel manipulator). Thus, we can only end up with a spherical isogram illustrated in Figure 4, which is studied in more detail in [34].
2.2. Mathematical Framework
- not parallel, then the composition is a rotation about the line of intersection,
- parallel, then the composition is a translation orthogonal to these planes.
3. Plane-Symmetric Self-Motions
- straight line,
- conic section,
- cubic curve,
- quartic curve.
3.1. Intersection Curve Is a Straight Line
- General Case: Let us assume that and hold. Clearly, the straight line in has to correspond with a rotation about the line spanned by and . Therefore, the line spanned by and generates either a hyperboloid, cone or cylinder of revolution with axis . Moreover, all these poses of the platform points have to be obtained by plane-reflexions of the points and , respectively. This already implies that the 1-parametric set of planes has to be a pencil of planes with axis . Therefore, the leg lengths and are given bywhich is already the necessary and sufficient condition for the two quadrics and to have a straight line in common.
- Special Case: As the case and cannot arise (legs are identical), we only have to discuss one further case due to the symmetric leg-replacement. Without loss of generality, we can assume and . Now, has to trace a circle about the line , which in fact implies the same condition given in Equation (4) for .
3.2. Intersection Curve Is a Conic
3.3. Intersection Curve Is Cubic

3.4. Intersection Curve Is Quartic
- 1.
- butterfly self-motion,
- 2.
- two-dimensional spherical self-motion,
- 3.
- planar/spherical symmetric rollings of Section 2.1.
- holds, which yields the spherical symmetric rolling (with center ) of Section 2.1,
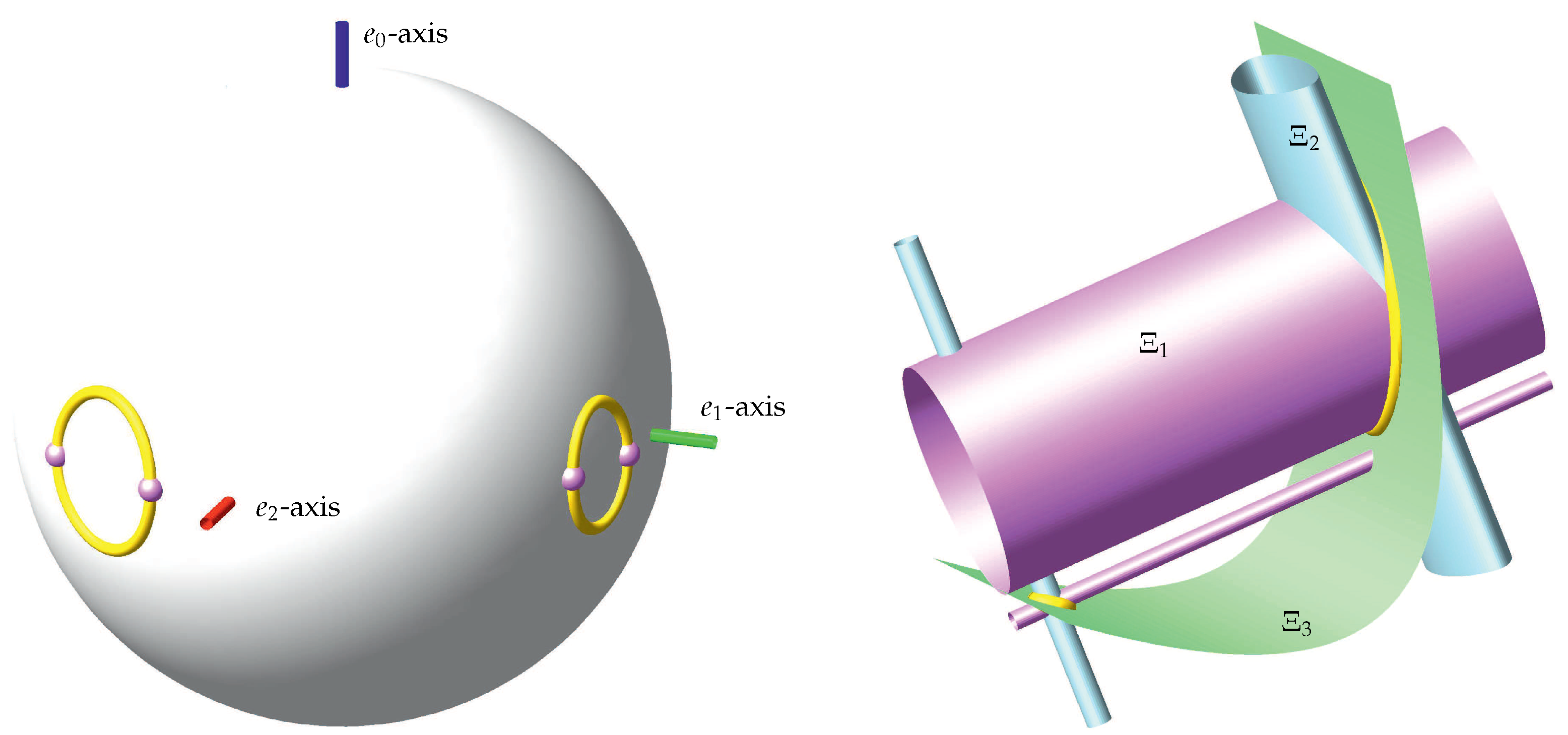
- holds, which implies a two-dimensional spherical self-motion (with center ; cf. Figure 6, right).
- For , Equation (10) imply and , respectively. imply the conditions of Lemma 1.
- For , Equation (10) imply . Then, the second and third leg are identical under consideration of symmetric leg-replacement.
- For , we have to distinguish two cases:
- (a)
- : now, the condition simplifies to . As implies a contradiction, we set . Then, Equation (10) imply , which results in the conditions of Lemma 1.
- (b)
- : Under this assumption, we can solve this equation for . A further two cases have to be distinguished:
- : If one solves this equation for , then Equation (10) implies for distinct . In both cases, we end up with the conditions of Lemma 1.
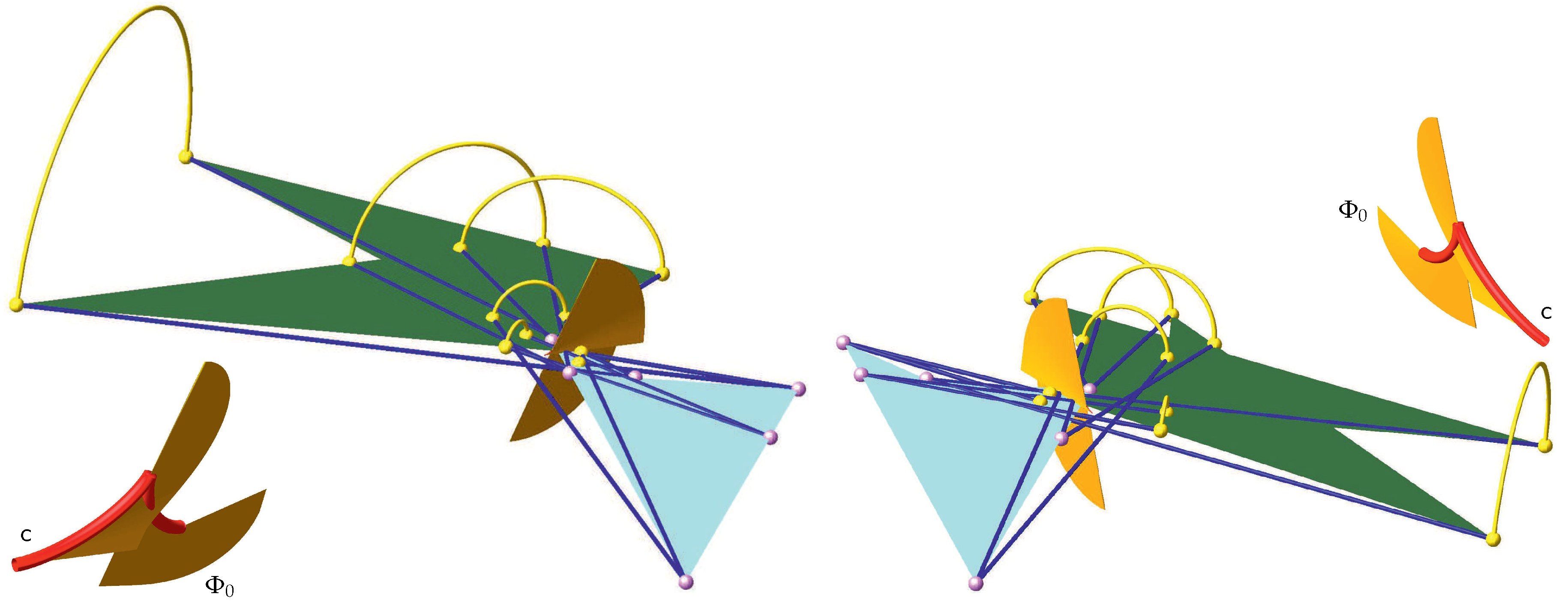
- : Under this assumption, we can solve the condition implied by Equation (10) for , which yields:It can easily be checked that the obtained solution corresponds to the hexapod’s platform and base illustrated in Figure 7, which are also known as Duporcq’s complete quadrilaterals [38]. In the remainder of the paper, this interesting solution, which is discussed/studied in more detail in the next section, is called Duporcq hexapod. Based on this notation, we can formulate the following theorem.
4. Duporcq Hexapod
4.1. Plane-Symmetric Self-Motions of the Duporcq Hexapod
4.2. Point-Symmetric Self-Motions of the Duporcq Hexapod
- the Duporcq manipulator also has pure translational one-dimensional self-motions,
- each two-dimensional line-symmetric self-motion of a Duporcq manipulator contains a pure translational one-dimensional sub-self-motion.
- point-symmetric self-motion,
- plane-symmetric self-motion.
5. Conclusions
Funding
Conflicts of Interest
References
- Quetelet, L.A.J. Memoire sur une nouvelle maniere de considerer les caustiques, produites soit par reflexion soit par refraction. Brux. Nouv. Mem. 1826, 3, 89–140. (In French) [Google Scholar]
- Tölke, J. Ebene euklidische und sphärische symmetrische Rollungen. Mech. Mach. Theory 1978, 13, 187–198. (In German) [Google Scholar] [CrossRef]
- Bereis, R. Über die symmetrische Rollung. Österr. Ing. Arch. 1953, 7, 243–246. (In German) [Google Scholar]
- Bottema, O. Characteristic properties of the symmetric plane motion. Proc. K. Ned. Akad. Wet. B 1972, 75, 145–151. [Google Scholar]
- Darboux, G. Lecons sur la Theorie Generale des Surfaces; Gauthier-Villars: Paris, France, 1887. (In French) [Google Scholar]
- Krames, J. Über Fußpunktkurven von Regelflächen und eine besondere Klasse von Raumbewegungen (Über symmetrische Schrotungen I). Monatsh. Math. Phys. 1937, 45, 394–406. (In German) [Google Scholar] [CrossRef]
- Selig, J.M.; Husty, M. Half-turns and line symmetric motions. Mech. Mach. Theory 2011, 46, 156–167. [Google Scholar] [CrossRef] [Green Version]
- Bottema, O.; Roth, B. Theoretical Kinematics; North-Holland: Amsterdam, The Netherlands, 1979. [Google Scholar]
- Gallet, M.; Nawratil, G.; Schicho, J.; Selig, J.M. Mobile Icosapods. Adv. Appl. Math. 2017, 88, 1–25. [Google Scholar] [CrossRef]
- Hernandez-Gutierrez, I. Screw Surfaces in the Analysis and Synthesis of Mechanisms. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1989. [Google Scholar]
- Pottmann, H.; Wallner, J. Computational Line Geometry; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Kunze, S.; Stachel, H. Über ein sechsgliedriges räumliches Getriebe. Elem. Math. 1974, 29, 25–32. (In German) [Google Scholar]
- Baker, J.E. The single screw reciprocal to the general plane-symmetric six-screw linkage. J. Geom. Graph. 1997, 1, 5–12. [Google Scholar]
- Husty, M.E. Borel’s and R. Bricard’s Papers on Displacements with Spherical Paths and their Relevance to Self-Motions of Parallel Manipulators. In Proceedings of the International Symposium on History of Machines and Mechanisms–HMM 2000; Ceccarelli, M., Ed.; Kluwer: Dordrecht, The Netherlands, 2000; pp. 163–171. [Google Scholar]
- Nawratil, G. Correcting Duporcq’s theorem. Mech. Mach. Theory 2014, 73, 282–295. [Google Scholar] [CrossRef] [PubMed]
- Karger, A. Singularities and self-motions of equiform platforms. Mech. Mach. Theory 2001, 36, 801–815. [Google Scholar] [CrossRef]
- Karger, A. Singularities and self-motions of a special type of platforms. In Advances in Robot Kinematics: Theory and Applications; Lenarcic, J., Thomas, F., Eds.; Kluwer: Dordrecht, The Netherlands, 2002; pp. 155–164. [Google Scholar]
- Karger, A. Parallel manipulators with simple geometrical structure. In Proceedings of the EUCOMES 08: The Second European Conference on Mechanism Science; Ceccarelli, M., Ed.; Springer: Dordrecht, The Netherlands, 2008; pp. 463–470. [Google Scholar]
- Nawratil, G. Non-existence of planar projective Stewart Gough platforms with elliptic self-motions. In Computational Kinematics: Proceedings of the 6th International Workshop on Computational Kinematics (CK2013); Thomas, F., Perez Garcia, A., Eds.; Springer: Dordrecht, The Netherlands, 2013; pp. 49–57. [Google Scholar]
- Nawratil, G. On equiform Stewart Gough platforms with self-motions. J. Geom. Graph. 2013, 17, 163–175. [Google Scholar]
- Nawratil, G. Congruent Stewart Gough platforms with non-translational self-motions. In Proceedings of the 16th International Conference on Geometry and Graphics; Schröcker, H.-P., Husty, M., Eds.; Innsbruck University Press: Innsbruck, Austria, 2014; pp. 204–215. [Google Scholar]
- Nawratil, G. On the Self-Mobility of Point-Symmetric Hexapods. Symmetry 2014, 6, 954–974. [Google Scholar] [CrossRef] [Green Version]
- Dietmaier, P. Forward kinematics and mobility criteria of one type of symmetric Stewart-Gough platforms. In Recent Advances in Robot Kinematics; Lenarcic, J., Parenti-Castelli, V., Eds.; Kluwer: Dordrecht, The Netherlands, 1996; pp. 379–388. [Google Scholar]
- Karger, A.; Husty, M. Classification of all self-motions of the original Stewart-Gough platform. Comput. Aided Des. 1998, 30, 205–215. [Google Scholar] [CrossRef]
- Nawratil, G. Self-motions of parallel manipulators associated with flexible octahedra. In Proceedings of the Austrian Robotics Workshop; Hofbaur, M., Husty, M., Eds.; Umit Lecture Notes: Hall in Tyrol, Austria, 2011; pp. 232–248. [Google Scholar]
- Nawratil, G. Planar Stewart Gough platforms with a type II DM self-motion. J. Geom. 2011, 102, 149–169. [Google Scholar] [CrossRef]
- Husty, M.L.; Karger, A. Self motions of Stewart-Gough platforms, an overview. In Proceedings of the Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, Quebec City, QC, Canada, 2–3 October 2002; Gosselin, C.M., Ebert-Uphoff, I., Eds.; pp. 131–141. [Google Scholar]
- Nawratil, G. Introducing the theory of bonds for Stewart Gough platforms with self-motions. ASME J. Mech. Rob. 2014, 6. [Google Scholar] [CrossRef]
- Gallet, M.; Nawratil, G.; Schicho, J. Liaison Linkages. J. Symb. Comput. 2017, 79, 65–98. [Google Scholar] [CrossRef]
- Borel, E. Mémoire sur les déplacements à trajectoires sphériques. In Mém. Présent. Var. Sci. Acad. Sci. Natl. Inst. Fr. TOME XXXIII; Imprimerie Nationale: Paris, France, 1908; pp. 1–128. (In French) [Google Scholar]
- Bricard, R. Mémoire sur les déplacements à trajectoires sphériques. J. École Polytech. 1906, 11, 1–96. (In French) [Google Scholar]
- Karger, A. New Self-Motions of Parallel Manipulators. In Advances in Robot Kinematics: Analysis and Design; Lenarcic, J., Wenger, P., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 275–282. [Google Scholar]
- Karger, A. Self-motions of Stewart-Gough platforms. Comput. Aided Geom. Des. 2008, 25, 775–783. [Google Scholar] [CrossRef]
- Figliolini, G.; Angeles, J. The Spherical Equivalent of Bresse’s Circles: The Case of Crossed Double-Crank Linkages. ASME J. Mech. Rob. 2014, 9. [Google Scholar] [CrossRef]
- Glaeser, G.; Stachel, H.; Odehnal, B. The Universe of Conics; Springer Spektrum: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Husty, M.L. An algorithm for solving the direct kinematics of general Stewart-Gough platforms. Mech. Mach. Theory 1996, 31, 365–380. [Google Scholar] [CrossRef]
- Borras, J.; Thomas, F.; Torras, C. On Delta Transforms. IEEE Trans. Robot. Autom. 2009, 25, 1225–1236. [Google Scholar] [CrossRef] [Green Version]
- Duporcq, E. Sur un remarquable déplacement à deux paramétres. Bull. Soc. Math. Fr. 1901, 29, 1–4. (In French) [Google Scholar]
- Nawratil, G.; Schicho, J. Duporcq Pentapods. ASME J. Mech. Rob. 2017, 9. [Google Scholar] [CrossRef]
- Gogu, G. Branching singularities in kinematotropic parallel mechanisms. In Computational Kinematics: Proceedings of the 5th International Workshop on Computational Kinematics; Kecskemethy, A., Müller, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 341–348. [Google Scholar]
- Stachel, H. Flexible Polyhedral Surfaces With Two Flat Poses. Symmetry 2015, 7, 774–787. [Google Scholar] [CrossRef]
- Wohlhart, K. Kinematotropic linkages. In Recent Advances in Robot Kinematics; Lenarcic, J., Parenti-Castelli, V., Eds.; Kluwer: Dordrecht, The Netherlands, 1996; pp. 359–368. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flat Pose | |||
|---|---|---|---|
| 1 | −0.63171148011492395006 | 0.77520358996267041460 | 0.24434973773984142590 |
| 2 | −0.26236530678800600560 | 0.96496862425367773706 | 0.36840718493416854565 |
| 3 | 0.89932040897259076870 | 0.43729029489044469464 | −1.6168042368274940498 |
| 4 | 0.98317707611585865513 | 0.18265496708349071532 | −2.3876030965525136289 |
| Flat Pose | |||
|---|---|---|---|
| 1 | 1 | 0.1406805116103807682 | −0.2234541534831142304 |
| 2 | 1 | 2.9246864608666834522 | −1.0586559382600050357 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nawratil, G. Hexapods with Plane-Symmetric Self-Motions. Robotics 2018, 7, 27. https://doi.org/10.3390/robotics7020027
Nawratil G. Hexapods with Plane-Symmetric Self-Motions. Robotics. 2018; 7(2):27. https://doi.org/10.3390/robotics7020027
Chicago/Turabian StyleNawratil, Georg. 2018. "Hexapods with Plane-Symmetric Self-Motions" Robotics 7, no. 2: 27. https://doi.org/10.3390/robotics7020027
APA StyleNawratil, G. (2018). Hexapods with Plane-Symmetric Self-Motions. Robotics, 7(2), 27. https://doi.org/10.3390/robotics7020027