1. Introduction
Technology is changing faster every day, and the same happens to human relationships and interactions. People are being presented with new mobile apps that allow them to chat to each other and share their lives even if they are geographically distant. Long-distance relationships (LDR) are becoming more common than ever, considering the fact that couples have a wide range of technological options to assist them to be in contact, at least virtually. More specifically, couples are now able to have intimate or sexual relationships while distant by using internet-connected sex toys, and these devices try to reduce the lack of physical contact in LDR couples.
The more the technology is developed, the more costs decrease, and electronic devices become more affordable. An important contribution to the development of technology and of new products is the open-source hardware and software, which allow more developers to work on projects and use their knowledge to help other people. In this work, we would like to highlight the development and popularization of electroencephalography (EEG) headsets. These devices are based on research and medical-grade equipment that are used to diagnose brain diseases and conditions in patients. The commercial EEG headsets led developers to work on a new area called brain-computer interfaces (BCI), which consists on using brain signals to control software or hardware devices.
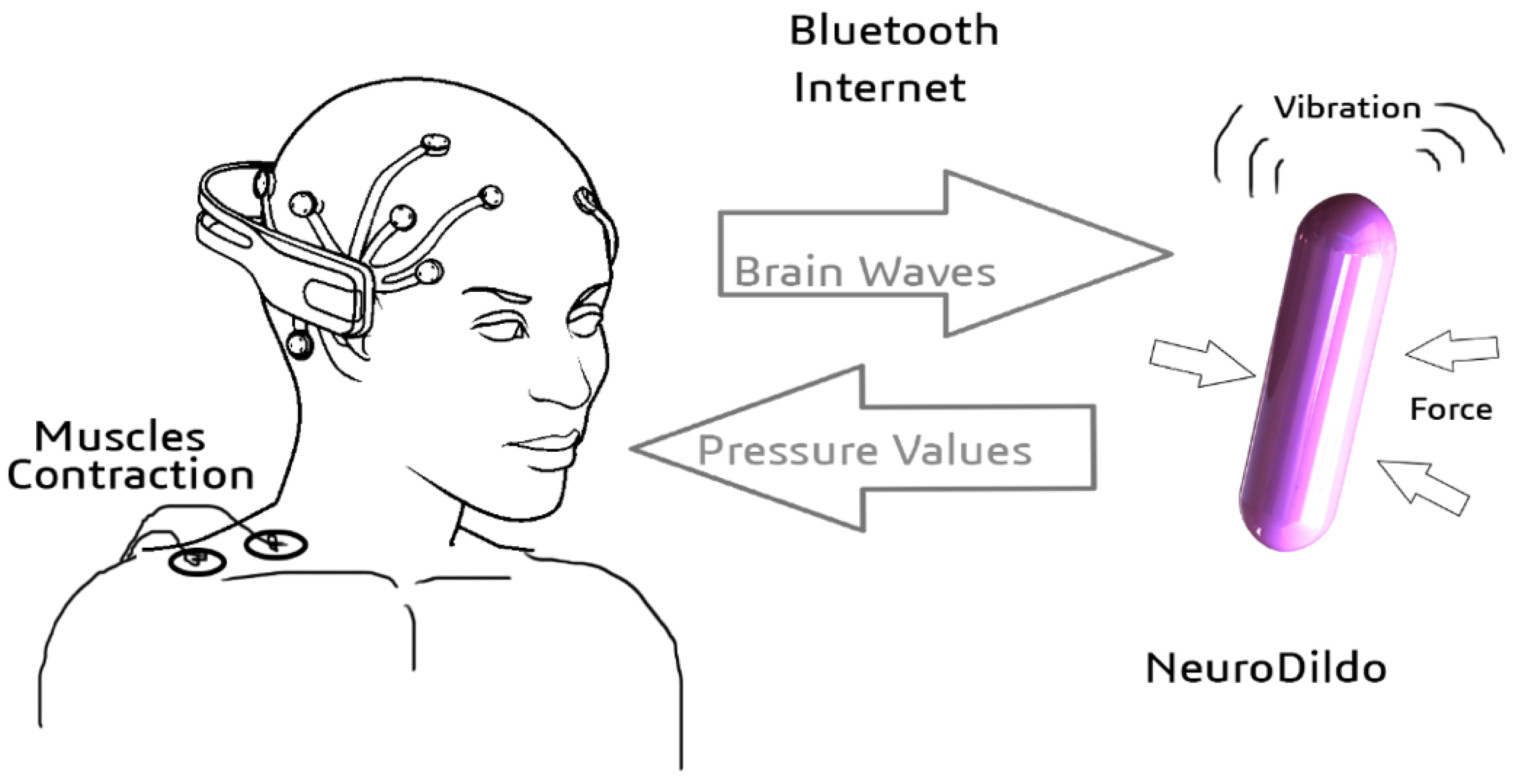
In the context of LDR and BCI, we developed the Neurodildo, which is a brain remote–controlled sex toy primarily for use by people with motor disabilities, for example with spinal cord injury (SCI), and who are not able to manipulate an ordinary sex toy using their hands. We focus on people with disabilities, but we do not exclude the use of the Neurodildo by people with a healthy motor condition. We also explore the scenario of disabled people that have limited social contacts or have failed in attempts to engage in a relationship, considering the importance of the sexual function and wellness to improving their quality of life (QoL). The fact that the sex toy can be used anywhere where it can be connected to the internet or in the presence of the person wearing the EEG headset may enable the person with a disability to have virtual sexual encounters with real physical stimulation. We also propose a feedback response system so that the sex toy may send stimuli to the person wearing the EEG headset and controlling the sex toy: this person would be electro stimulated proportionally as the sex toy feels the body muscular contractions pressure. The Neurodildo can be connected to the internet through Bluetooth and a mobile app or by computer software. It vibrates according to the received brain signal and sends proportional values of the attached pressure sensors, which will be used to activate an e-stimuli device connected to the wearer of the headset (
Figure 1). In this stage of the research, we designed and tested the technical features of the prototype. With this physical and working version of the prototype, we can preliminarily evaluate the user experience and consider their inputs for the next version, which will be clinically tested.
2. Background
A series of subjects was important for designing the concept of the Neurodildo, which was a multidisciplinary project. Due its complexity, the background research involved some aspects of the sexuality of people with disabilities, the injuries (focusing on SCI) and their effects in the body. We also explored the existing options on BCIs and how they could serve to our purposes, and also the existing projects and products related to disabled people, teledildonics, and mind-controlled devices. We also conducted research on the implications of the use of sex robots by people with disabilities so we could discuss how the Neurodildo could integrate with this technology and help people. In the following subsections, we briefly explain each topic and its importance to our work.
2.1. Disability and Sexuality
Spinal cord injury has a big impact in the life of individuals that have suffered it and also on their familiars. Studies indicate that researchers focus on the motor rehabilitation of people with SCI, in particular the restoration of locomotion function. SCI causes loss of important functions, including bladder, bowel, sexual, and sensory dysfunctions, that are not always directly visible to others [
1]. Though the anatomy and physiology of SCI-induced deficits are well understood, including sexual impairments such as fertility and reproduction, these should not be the only reason for studying the sexual problems resulting from SCI [
2].
In a study conducted by Anderson in 2004 [
3], people with SCI have been surveyed about their desires for functional restoration, and the results showed that most people ranked sexual function in the top priorities, above the priority of regaining walking movement. In another study [
2], 82.9% of the surveyed subjects stated that improving sexual function was important to the improving of their quality of life (QoL). They were also asked about the main reasons for pursuing sexual activity, resulting in 57.7% listing intimacy need as the primary reason, 18.9% for sexual need, 9.8% because of self-esteem, and 8.4% to keep a partner. Anderson also states that considering the fact that more than 80% of the participants stated that their SCI had altered their sexual sense of self and that improving sexual function would improve their QoL, it is reasonable to consider that research in this area needs to be expanded. People with SCI may still be sexual people, with desires and necessities, but certain attention is needed regarding the nature of their physical disability.
The damaged nerves or blood supply can interfere with the sexual response, and it may be difficult to get into a position for making love, or there may be limitations that interfere with the foreplay [
4]. In male population, for example, SCI affects the sexual function depending on the level of the lesion and its completeness. One may have its capability of maintaining erections affected, or the occurrence of ejaculation may become relatively rare or to cease. Studies on vibrostimulation indicated that using stronger stimulation parameters significantly increased the success rate for ejaculation [
5]. The development and using of technological devices such as sex toys can improve the sexual function of disabled people and improve their QoL.
2.2. Sex Toys for Disabled People
Sex toys are designed not only focusing on penetrative sex, and this must be emphasized while considering the design for people with SCI. A range of products is available in the market, and these products can be used as sexual aids for disabled people [
6]. Cosmetics for increasing lubrication of women, massagers [
7], sex furniture [
8], nipple clamps, floggers, plugs, and commercial vibrators are options, but none of them are specifically made for people with disabilities.
The design of a sex toy for people with SCI should consider particular aspects that may not be clear for people without disabilities. People may have limitations in the positions they can do while making love, but they can also have increased or decreased sensibility in certain parts of the body. Bowel and bladder dysfunctions, loss or impairment of hand function, decreased energy levels, and less lubrication than in healthy conditions (in the case of women) may be caused by SCI [
4].
The design parameters commonly used for assistive devices for people with physical disabilities, such as wheelchairs (manual or automatic), walkers, and canes prosthetics, may provide valuable insights when designing sex toys for disabled people. A study [
9] applied a method for evaluating the main factors that general disabled consumers, not only those who are physically disabled, considered when choosing an assistive device, and not abandoning it. A total of 17 factors were prioritized in this research, but the most important were effectiveness, affordability, operability, and dependability.
Ferticare [
10] is a Danish product designed with disabled people in mind. It helps men with spinal cord injuries to ejaculate by vibrostimulation of the penis. The amplitude and frequency of the vibrations can be adjusted with large knobs, and the device can be turned on and off by hitting its base. These features are valuable for people with decreased strength of hands, but in most situations, users would need the assistance of a carer when setting up the device and positioning it for use. Other examples of accidentally accessible sex toys are the Tantus Rumble [
11], which is an ergonomic, lightweight ,and comfortable to hold vibrator; Liberator [
12], which is a furniture brand that has a line of wedge-shaped pillows that can support the body during sex; Eva [
13], which is a hands-free vibrator for women; Pulse [
14], which is also a hands-free sex toy, but for men; and Humpus [
15], which is a sex machine for men and women with interchangeable attachments and that can be used as a belt, so it becomes hands-free.
2.3. Long-Distance Relationship as a Possibility
Within all the benefits that technological advances can provide for the population, we highlight the area of social relations, more specifically long-distance relationships (LDR). In the past, couples could communicate only by sending letters and after that by phone calls. Because of the internet, live video calls became feasible and popular, and more recently, mobile devices appeared as an important tool for communication. LDR may occur for different reasons, including but not limited to the demands of work, choice of careers, college studies and studying abroad programs, or the autonomy of the individuals. While LDR may be beneficial, couples face several challenges, ranging from technical problems while video chatting and time zone differences to lack of true physicality needed by most in order to support intimate sexual acts [
16].
Recently, companies have developed products aimed at, but not only for, couples in LDR. The products consist of sex toys that can be connected to the internet and, in the most cases, vibrating being controlled remotely by a mobile app or computer software. These devices are part of the area called teledildonics, within the area of the internet of things (IoT). The most known IoT sex toys are the Lovense Lush [
17], the We-Vibe Sync [
18], and the Ohmibod Panty Vibe [
19]. Most of these toys have Bluetooth connection and are able to pair with a mobile phone and, through an app, be controlled over the internet. Though these sex toys are designed for couples, they only permit the person wearing the sex toy, usually the woman, to receive stimuli controlled by the person using the app, who does not receive any sexual stimuli besides the visual feedback of the woman having sexual pleasure.
People with SCI and other disabilities may benefit themselves by using services and products designed for LDR. Disabilities might make it difficult for a person to go out on a date or even to find a partner. There are some dating websites focusing on people with disabilities [
20], but they can also use other dating services or mobile apps that are for general public. Another option is contacting a sex worker, but the person should fully understand the inherent risks [
4]. By engaging a LDR or contacting a sex worker, a teledildonic device may be a useful resource for either people with or without disabilities. Self-stimulation by using teledildonic devices is also possible, considering that a person, even with limited arm movement, has access to and can use a smartphone for controlling the sex toy after positioning it.
2.4. Brain–Computer Interfaces (BCI)
A brain–computer interface (BCI), or brain–machine interface (BMI), is a set of hardware and software system that enables humans to interact with their surroundings without the involvement of peripheral nerves and muscles. This interaction is possible by the interpretation, processing, and application of signals generated by electroencephalography activity [
21]. Most researchers apply BCI to provide communications capabilities to severely disabled people who are totally paralyzed, including people who suffered SCI. The BCI can recognize certain set of patterns in brain signals by acquisition of the signals using electrodes placed on the scalp, pre-processing the signals (filtering artifacts), extracting features, and classifying the signals to control the interface.
Consumer-grade BCI are now available, including proprietary products such as Emotiv Epoc [
22] and the Neurosky MindWave [
23] headsets. Open-source projects can also be used for BCI, including the Olimex OpenEEG [
24], based on the project OpenEEG [
25], and the OpenBCI project [
26], which is a source of useful resources like software and hardware schematics. In this work, we have chosen to use an Emotiv Epoc headset because we had it available and would not need to build the hardware by ourselves in this first stage of the research. The Emotiv Epoc is a set of 14 electrodes and two references that are able to detect patterns of thought, feelings, and expressions in real time [
22].
Researchers have successfully demonstrated that BCI headsets like the Emotiv Epoc are able to work as an interface for controlling other devices. Through the brain waves, a robot arm can be remotely controlled [
27], and regarding the people with SCI, studies have combined BCI and assistive technologies for example, by developing an electric wheelchair controlled by the mind [
28]. Recently, the media has published some articles about companies and designers who are exploring the possibilities of using BCI for controlling sex toys [
29,
30].
2.5. Sex Robots and Disabled People
In recent years, the media has started publishing an increasing number of articles related to sex robots. This increase may suggest that the general public is demanding more information and becoming interested in the topic, besides raising ethical and moral issues that we have to may cope with in the near future. In the academic community, an increased number of papers and books [
31,
32] about sex robots and related technology indicates that the concerns of general public should be discussed in order to keep safe the future applications of this technology.
According to Danaher [
32], a sex robot can be defined as an artificial entity that is used for sexual purposes (i.e., for sexual stimulation and release). The sex robot must also meet the following conditions:
Humanoid form: it is intended to represent a human or human-like being in its appearance;
Human-like movement/behavior: it is intended to represent a human or human-like being in its behaviors and movements;
Some degree of artificial intelligence (AI): it is capable of interpreting and responding to information in its environment. This may be minimal (e.g., simple preprogrammed behavioral responses) or more sophisticated (e.g., human-equivalent intelligence).
By meeting these conditions, a sex robot can differentiate from other robots, for example industrial robots (which are not for sexual purposes nor have a human-like being form), and from sex toys and machines (which are for sexual purposes, sometimes represent human, in the case of sex dolls but generally do not have any degree of AI).
As a promising technology in the field of human interactions, sex robots can be discussed in the context of the sexuality of people with disabilities. Many people need assistance in order for their sexual needs to be satisfied, e.g., the severely physically and mentally disabled, but also many elderly people who suffer from neurodegenerative diseases. In the Robot Sex book [
32], the author Ezio Di Nucci discuss the sexual rights of disabled people and how sex robots could benefit them. Sophisticated sex robots may be able to assist disabled people and help them achieve having sexual satisfaction, filling a gap that occurs in some cases, when disabled people cannot find any other person, e.g., a partner or a sexual carer, willing to help them.
3. Neurodildo Design Process
3.1. System Overview
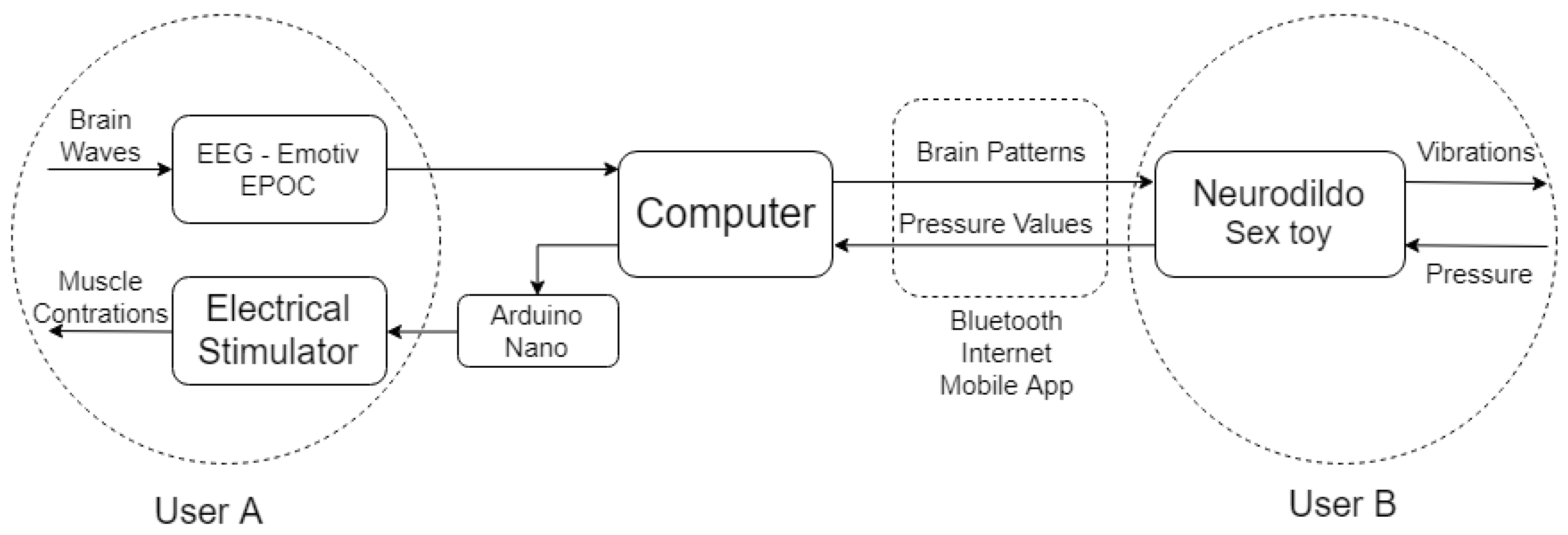
The Neurodildo device consists of a system with three major parts. The first part is the sex toy, which is able to communicate by Bluetooth with a smartphone or a computer. It also has a microcontroller board (Arduino) and a circuit to drive a vibration motor, allowing vibration in eight different patterns and intensities. The sex toy has also two force sensors attached to its plastic surface and under a silicone sleeve, that are able to measure and react to the external pressure against its surface. The second part of the system is the BCI headset (the Emotiv EPOC) and its control software running on a computer. The third and last part of the system is the computer-controlled E-Stim device (Electrical Muscle Stimulation), which is responsible for stimulating the muscles of the person who controls the sex toy vibration using the brain signals. The stimulation is proportional to the force applied to the sex toy sensors.
The Neurodildo system works as follows:
User A wears the Emotiv Epoc headset and places the electrical stimulation electrodes on the desired part of one’s own body;
User A turns on the Emotiv Epoc and the e-stim device and sets up the necessary software, including the Emotiv and the python script for communicating with the sex toy;
User B turns the sex toy on so that it can be paired with the computer of User A. In the future, we will develop a mobile app so that User B can pair the sex toy with a smartphone instead of a computer;
The User A begin concentrating on the brain patterns that he or she has trained previously, for example by focusing on a pre-trained pattern (pushing a virtual block);
The User B feels the vibration of the sex toy changing as the User A focus with more or less intensity;
The pressure applied to the body of the sex toy, for example by a sensitive body part, is sensed by the force sensors under the silicone sleeve of the toy;
The variation of the pressure values is transmitted through Bluetooth to the computer of User A;
The User A feels an electrical stimulation of his or her muscles proportional to the intensity that User B is pressing on the sex toy;
The User A gets aroused because of the visual stimulation (in person or by video chat) and due to the e-stim and then makes the sex toy vibrate more, arousing the User B, and so on.
The block diagram representing the Neurodildo system is shown in
Figure 2:
In the following sections, we will detail each part of the Neurodildo system and components used to build the first version of the prototype.
3.2. Design of the Sex Toy
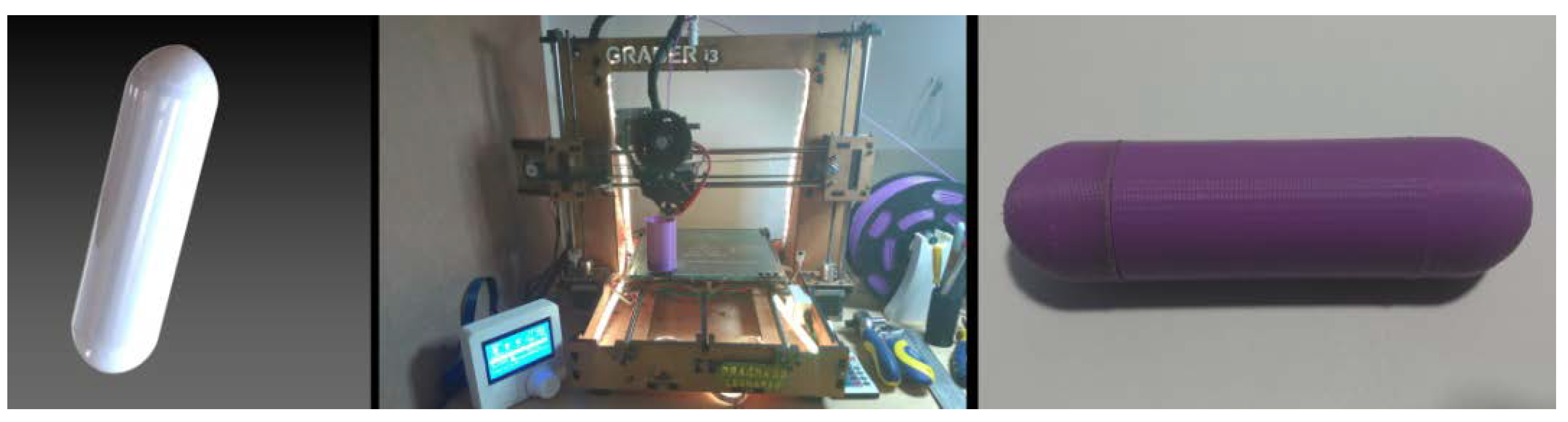
The first step of building the sex toy prototype was the 3D modelling of the plastic body. We modelled the plastic body as a cylinder with the top and bottom ends in a rounded shape. Although the name of our sex toy includes the word “Dildo”, which means a phallic sex toy intended for sexual penetration, our Neurodildo is essentially a vibrator, which by definition may have or not a phallic shape. We used Solidworks 2017, Dassault Systèmes, Vélizy-Villacoublay, France, a software for modelling and generating the STL file, which would be used after in the 3D printing stage. The body of the sex toy is hollow for housing the electronics, battery and the vibration motor. After modelling, we used Cura 14.07, Ultimaker, Geldermalsen, Netherlands
, a software for slicing the 3D model and generating the g-code file, which is the one used by the 3D printer. We printed the body of the sex toy in ABS plastic using a homemade 3D printer. The dimensions of the sex toy were 35 mm external diameter and 127 mm length, and those dimensions were chosen considering that the sex toy should be small enough to be used in penetration but large enough to be easily handled. The 3D rendered model, the 3D printing process, and the plastic parts assembled of the sex toy are shown in
Figure 3. A hand holding the sex toy is shown in
Figure 4 for scale.
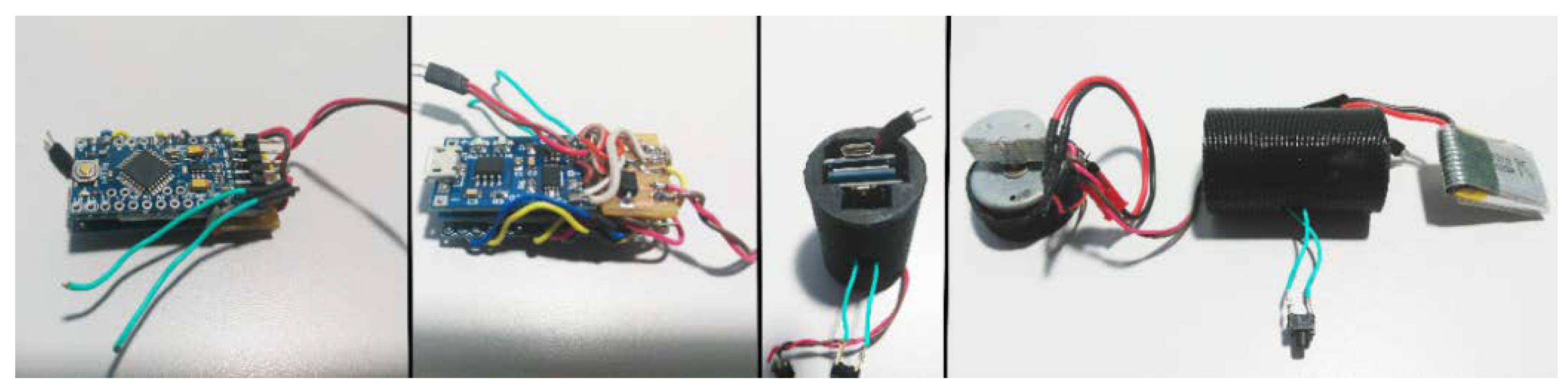
After 3D printing and assembling the body of the sex toy, we designed the electronic circuits. We used an Arduino Pro Mini board, which is connected to an HC-05 Bluetooth module. As we designed the sex toy to be portable, we used a TP4056 battery charger module and a 340 mAh 3.7 V Lipo battery. The vibration motor used in this prototype is a commercial one commonly used in gaming controllers, and to drive this motor we used a board with a switching transistor circuit. We fixed the electronics modules housed in a 3D printed enclosure that was inserted inside the body of the sex toy. A tactile button was also installed so the user can change between the pre-programmed vibration patterns and put the sex toy in sleep mode. In
Figure 5, we show the electronic modules (top and bottom view) and its wiring, the plastic housing with electronics inside, and the modules connected to the vibration motor and battery cell. With this setup, the sex toy can work for approximately 45 min, and the charging time is 90 min.
For the pressure sensing function, we chosen to use two force-sensitive resistors (FSR) attached to the body of the sex toy. FSR are sensors that detect physical pressure, squeezing, and weight [
33]. Its resistance decreases when a force is applied to its surface, and by using a voltage divider circuit, we could measure a variation of an analog voltage depending on the force applied to the sensors. In
Figure 6, we show the Neurodildo with the FSR attached to its body.
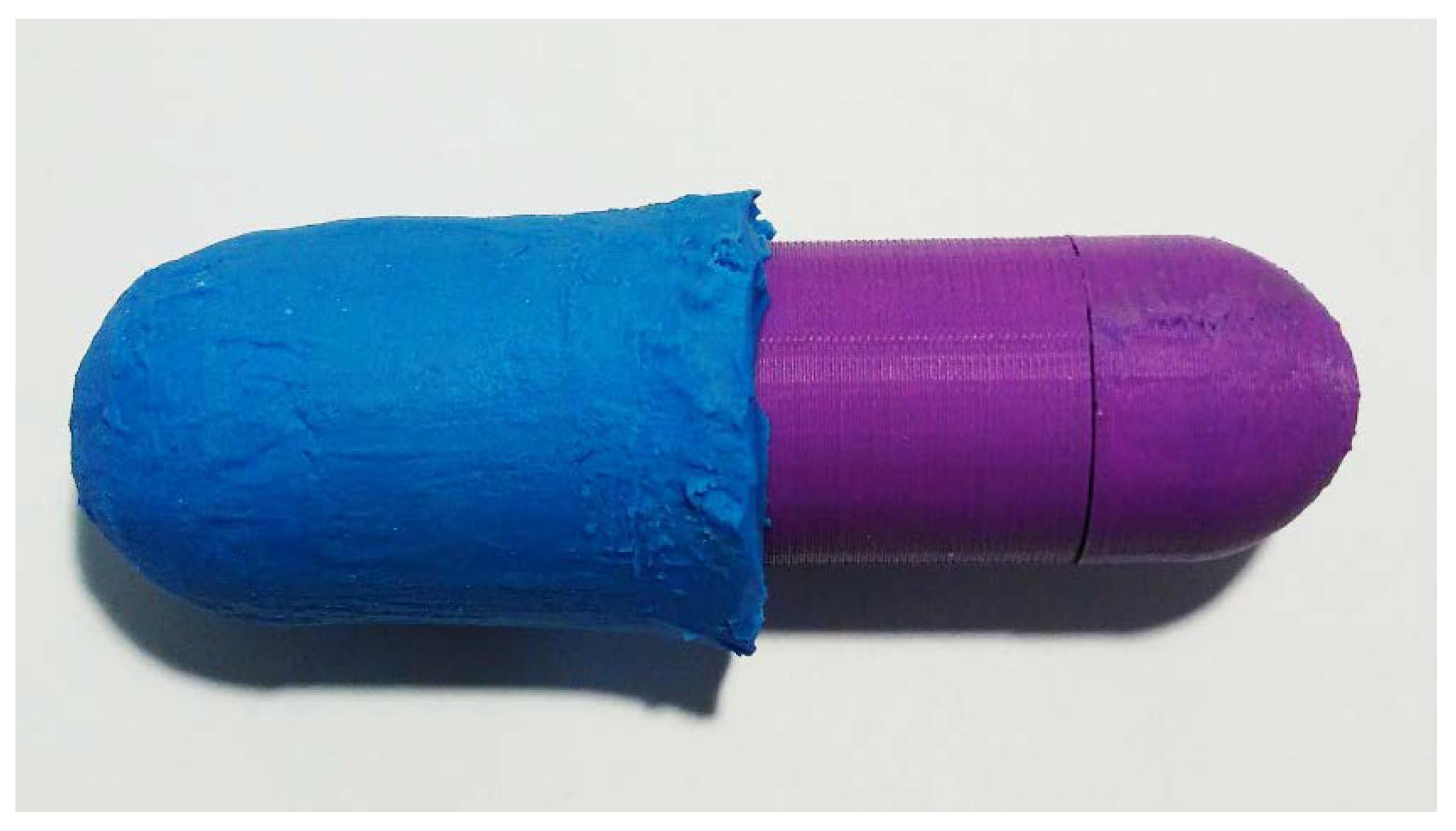
In order to protect the sensors, we designed a silicone sleeve that is placed over the plastic body of the sex toy and over the sensors. We made the negative mold of a slightly bigger version of the body of the sex toy using plaster of Paris and then used the silicone casting technique to create the sleeve by pouring silicone in the space between the mold and the original sex toy body. In this prototype we did not use medical-grade silicone, so this version is not suitable for being in contact with the body. The process of making the silicone sleeve is represented in
Figure 7.
Finally, we assembled the sex toy (
Figure 8) with the electronics inside, the attached sensors, and glued on the silicone sleeve. The bottom of the sex toy is removable because it is necessary to access the inside of the sex toy to charge the battery. For charging, a smartphone charger and a micro USB cable can be used.
3.3. The BCI—Emotiv EPOC
In order to use the Emotiv EPOC, Emotiv, San Francisco, California, USA, an EEG headset with the Neurodildo system, a series of steps are necessary for setting up the hardware and the software. First of all, the electrode sensors must be wetted using a saline solution in order to obtain good contact with the scalp and good signal quality. After that, the sensors need to be mounted in the neuroheadset arms, and the Emotiv USB transceiver is plugged into the computer.
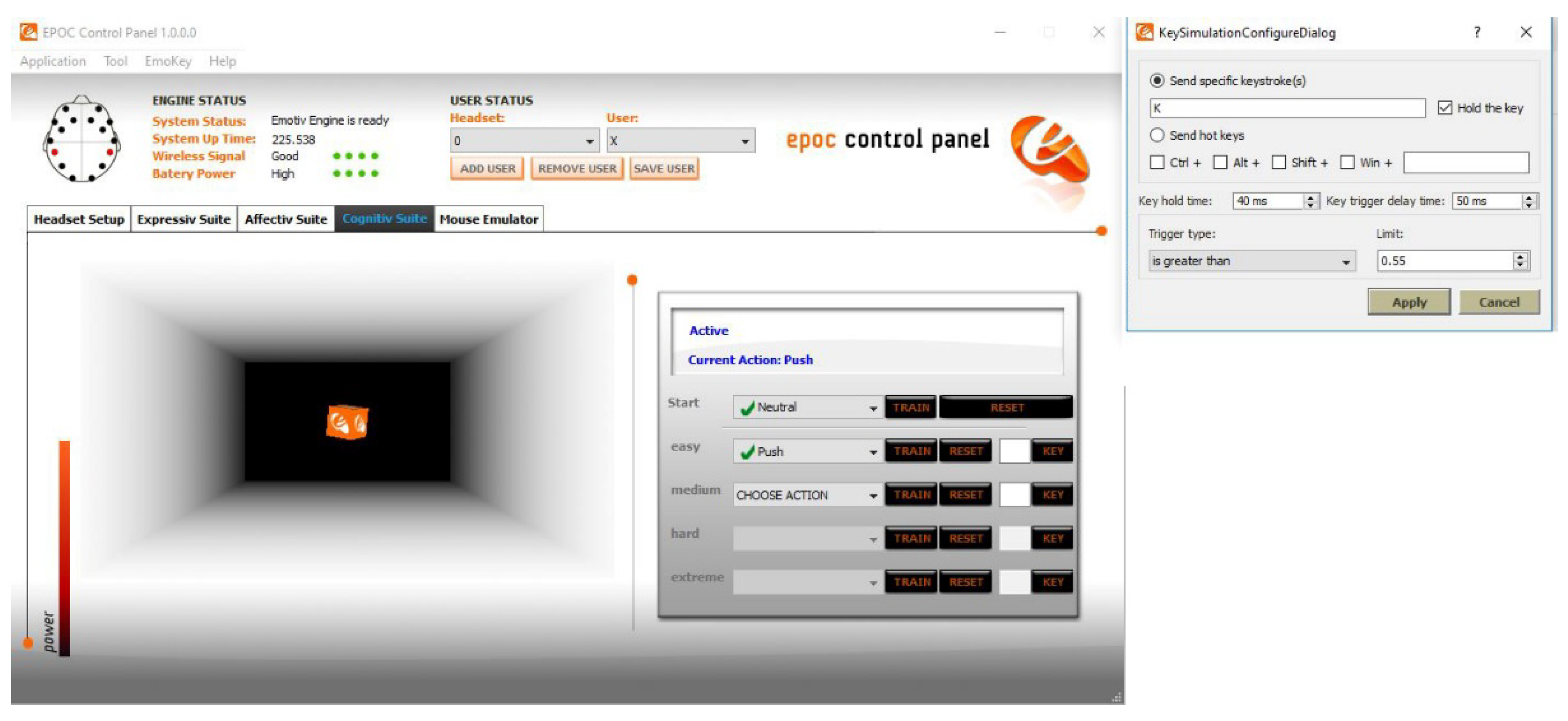
The first software to be used is the EPOC Control Panel, Emotiv, San Francisco, California, USA, which must be launched, and then the EPOC headset can be adequately placed on the head, following the positioning instructions in the user’s manual. The signal quality for all the sensors should be checked, and if all of them are green, the BCI is ready for use. Next, we should use the Cognitive Suite, in the Control Panel, for training the detection of brain waves and associate them with the user’s conscious intent to perform physical actions, like pushing or pulling an object and the neutral state of mind. The trained actions should be linked with keystroke commands using the Emokey. Inside the Cognitive Suite tab, any of the possible actions (push, pull, roll, etc.) can be associated with a keystroke action, which is set up by choosing the right parameters. The main parameters are the Limit, Trigger Type, Key Hold Time, and Key Trigger Delay time, the former representing the level of focusing, for example, that should activate the keystroke in the system. It is also necessary to choose what key will be virtually pressed, and the Key Hold Time parameter defines the duration of the keystroke. It is also possible to choose if the key will be held as long the pre-trained pattern intensity value is higher than the chosen threshold. In our tests, we set the limit to 0.55 and the hold time to 40 ms, achieving good recognition of the brain patterns of interest. The parameters should be changed every time a training session occurs or when another person uses the headset. The Cognitive Suite and Key Configuration windows are represented in
Figure 9, which includes the image of the virtual block used for brain pattern training.
The following step is to launch a python script that we developed and that runs in the background. This script is responsible for measuring the duration of the last keystroke in the system, which is related to the intensity of the recognized brain pattern, converting this time to a vibration intensity parameter (
Table 1), and sending this information to the sex toy by Bluetooth. The minimum vibration intensity, i.e., when the motor has 1.011 V, was calibrated manually by changing the voltage value and observing the minimum that could make the motor rotate without draining much current from the battery. The same python script is responsible for receiving the pressure values from the sex toy and activating the Arduino Nano, which activates the e-stim device and causes the user’s muscles to contract, who “feels” the same pressure that the sex toy is being subjected.
Figure 10 shows the Emotiv EPOC EEG headset [
22].
3.4. Pressure to E-Stim Feedback
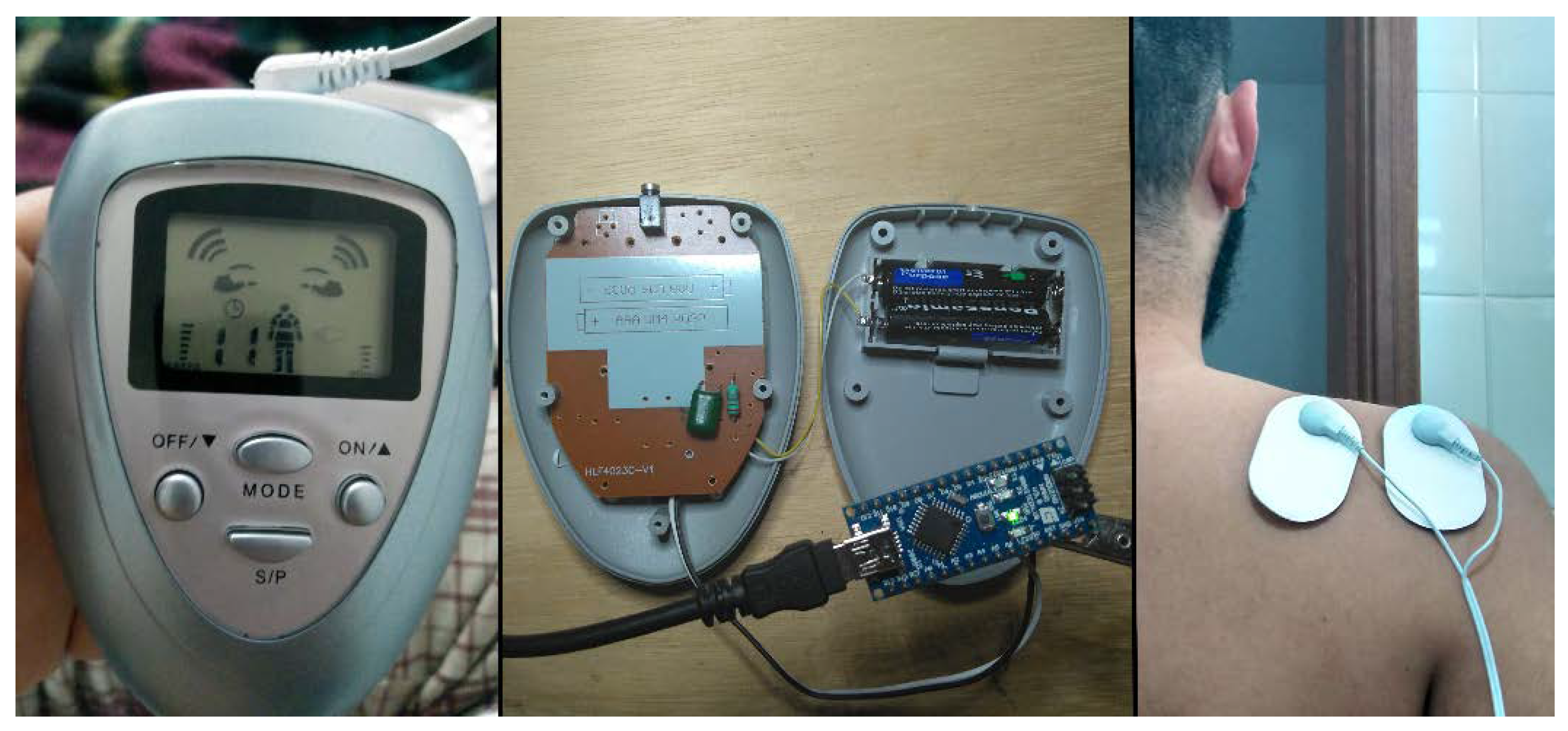
The third part of the Neurodildo system is the e-stim feedback device. The e-stim, or electrical muscle stimulation, is a type of physical therapy modality that can treat illness, pain, and be used for muscle healing. By placing electrodes on the skin, an electrical current causes a single muscle or a group of muscles to contract [
34]. The e-stim device can vary the amplitude and timing of the electrical stimulation, causing different sensations, similar to a vibration motor in contact with the skin. We’ve chosen to use an e-stim device integrated to the Neurodildo system because we wanted that the user, who is controlling the sex toy vibrations using the mind, could receive an additional stimulation beside the visual stimulus, when having virtual sex.
We decided to explore using of the e-stim because the electrodes can be attached to the body of the person—for example, one who has SCI—and do not need to be hand-held—as would happen with a second vibrator. In our system, there is an Arduino Nano board connected to the board of the e-stim plugged into a computer through a USB cable. The computer receives the information about the pressure on the sex toy by Bluetooth and activates the Arduino using a Python script. The Arduino, activates the e-stim, which generates an output wave to the electrodes proportional to the pressure applied to the sex toy.
Figure 11 shows the e-stim device, its connection to the Arduino, and the electrodes placed on a skin.
4. Experimental Results
A series of tests was performed to technically evaluate our prototype. We tested the parts of the system (the sex toy, the BCI, and the e-stim device) separately and integrated. In this section, we present the tests and their most important results, and by this, we demonstrate the working of the Neurodildo prototype.
4.1. Vibration Patterns and Intensities
Depending on the brain waves pattern captured by the BCI device, the vibration pattern and intensity can be changed proportionally in the sex toy. We implemented the recognition of only one pattern, the one corresponding to the “push” action trained on the Emotiv software that is associated with how long the user can keep focused. Our software sends the vibration intensity (bits) data by Bluetooth, which is converted to three different vibration intensities (motor voltage): weak, medium, and strong (
Figure 12). To demonstrate the vibration intensities, we placed the sex toy tip in a bowl filled with water, so we could show the level of the intensity as the waves produced by the vibration in the water. As the vibration becomes stronger, the wavelength decreases.
4.2. Pressure Sensing Function
The Neurodildo sex toy has two force sensors attached to its body, as mentioned in
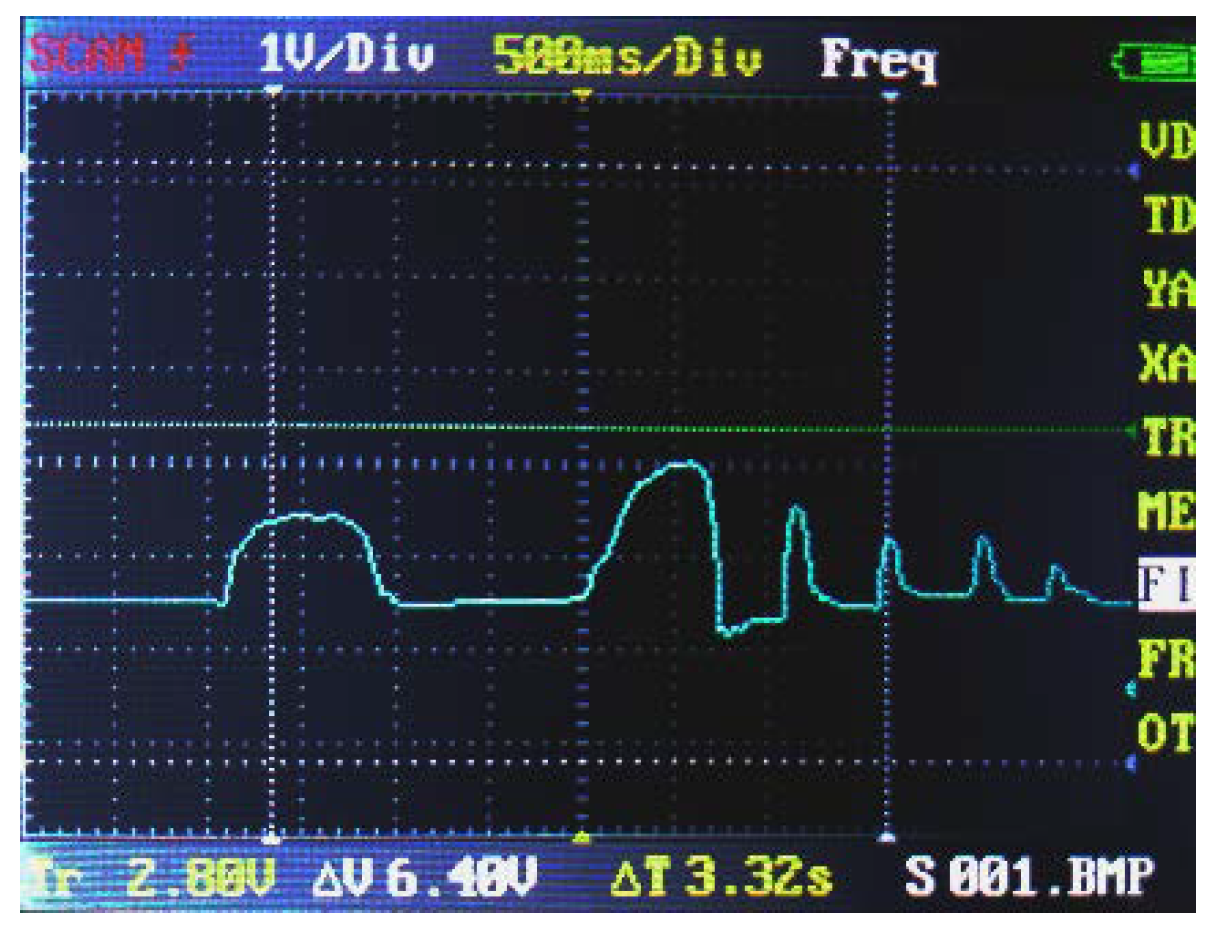
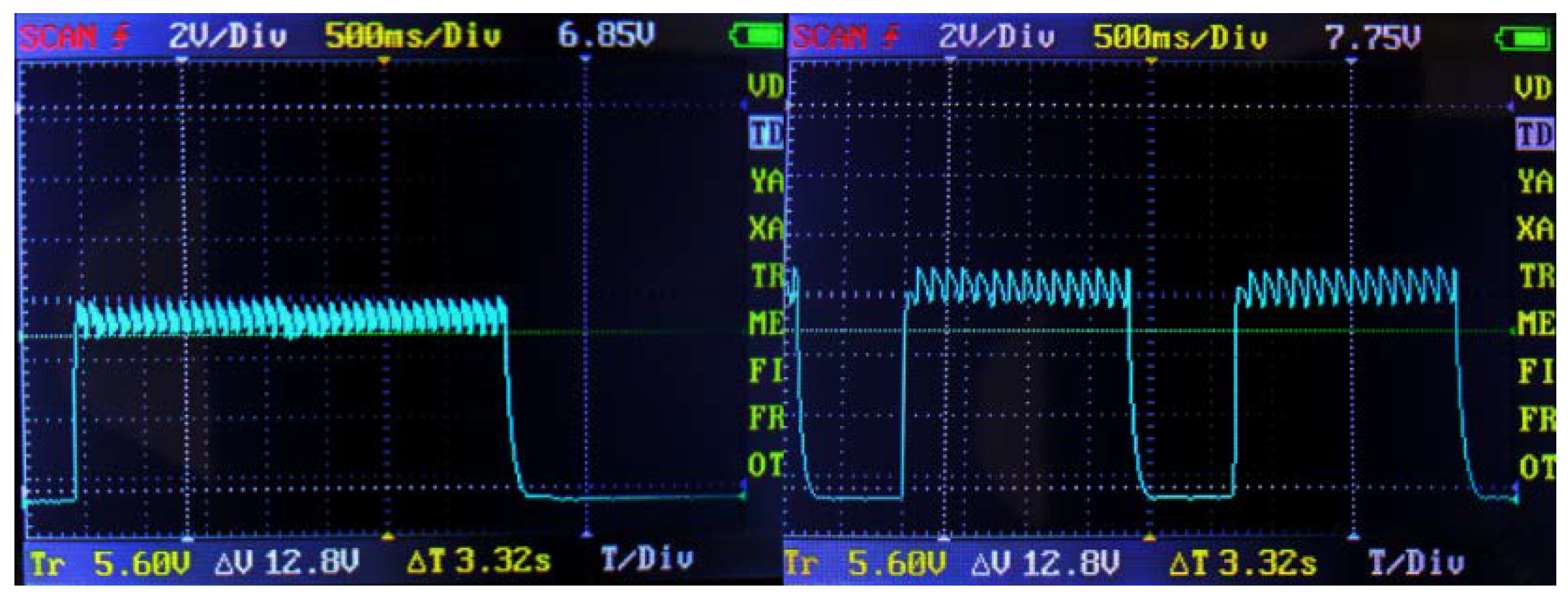
Section 3.2. They are responsible for sensing the pressure when the sex toy is being penetrated or rubbed against the body. For evaluating this function, we made two different tests. First, we measured the voltage variation caused by pressure applied to one of the sensors with an oscilloscope. Second, we collected the pressure values transmitted from the sex toy to the computer by Bluetooth, and then we plotted this data and compared with the oscilloscope-measured signal.
Figure 13 shows the screen capture of the oscilloscope during the first test. Each oscillation corresponds to the moment that the sensor was pressured, and the intensity of these oscillations is proportional to the force applied.
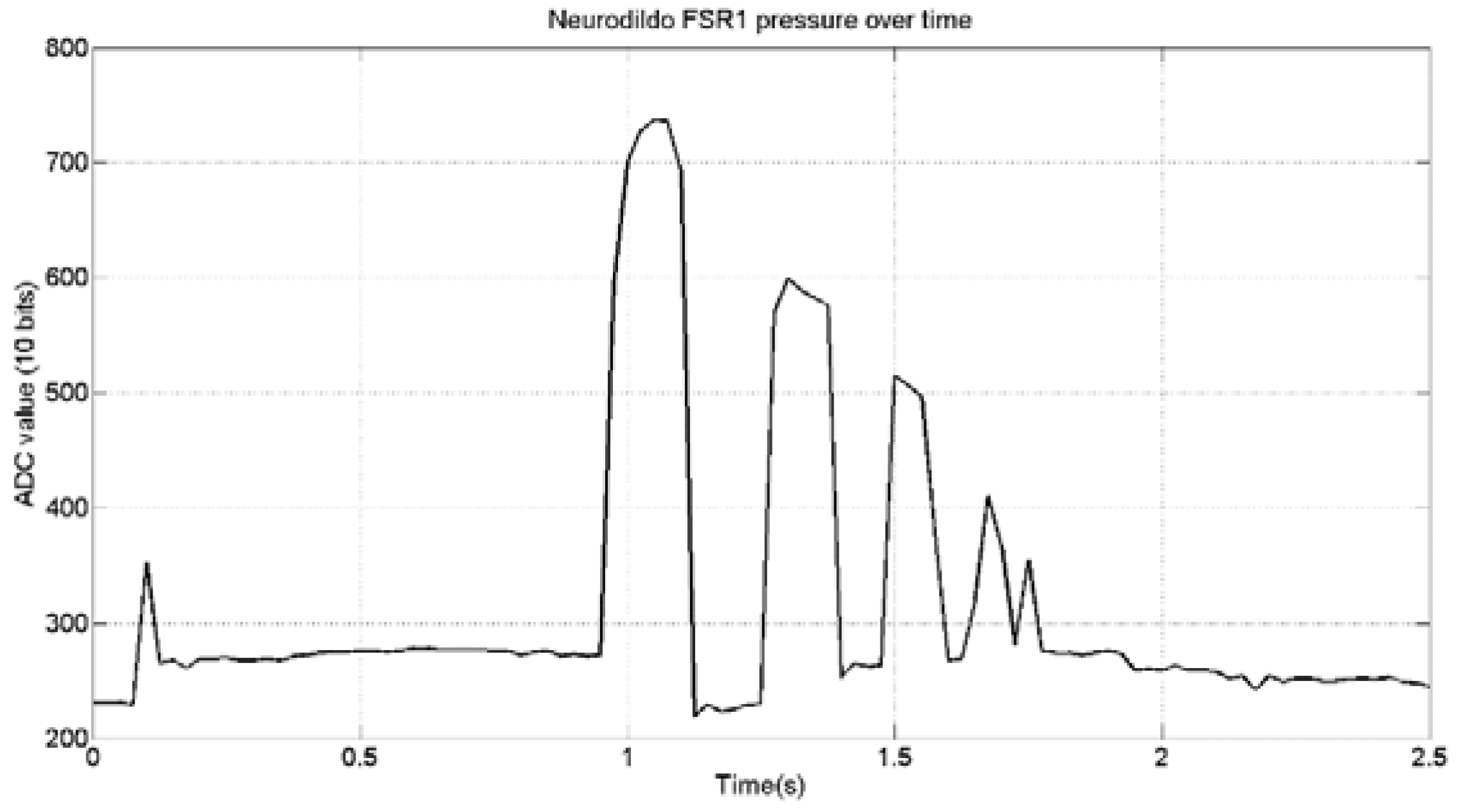
In the second test, we saved a log of the pressure data received from the sex toy and plotted it using the MATLAB software. The data was received and saved at the same time the first test was done.
Figure 14 represents the received pressure values, with the
y axis corresponding to the ADC converter values (10 bits, or 1024 values), and the
x axis is the time of the measure. Data was sent in packages every 25 ms, and the resolution was 3.23 mV for each ADC unit. By comparing
Figure 13 and
Figure 14, it is clear that the pressure data was collected and transmitted correctly.
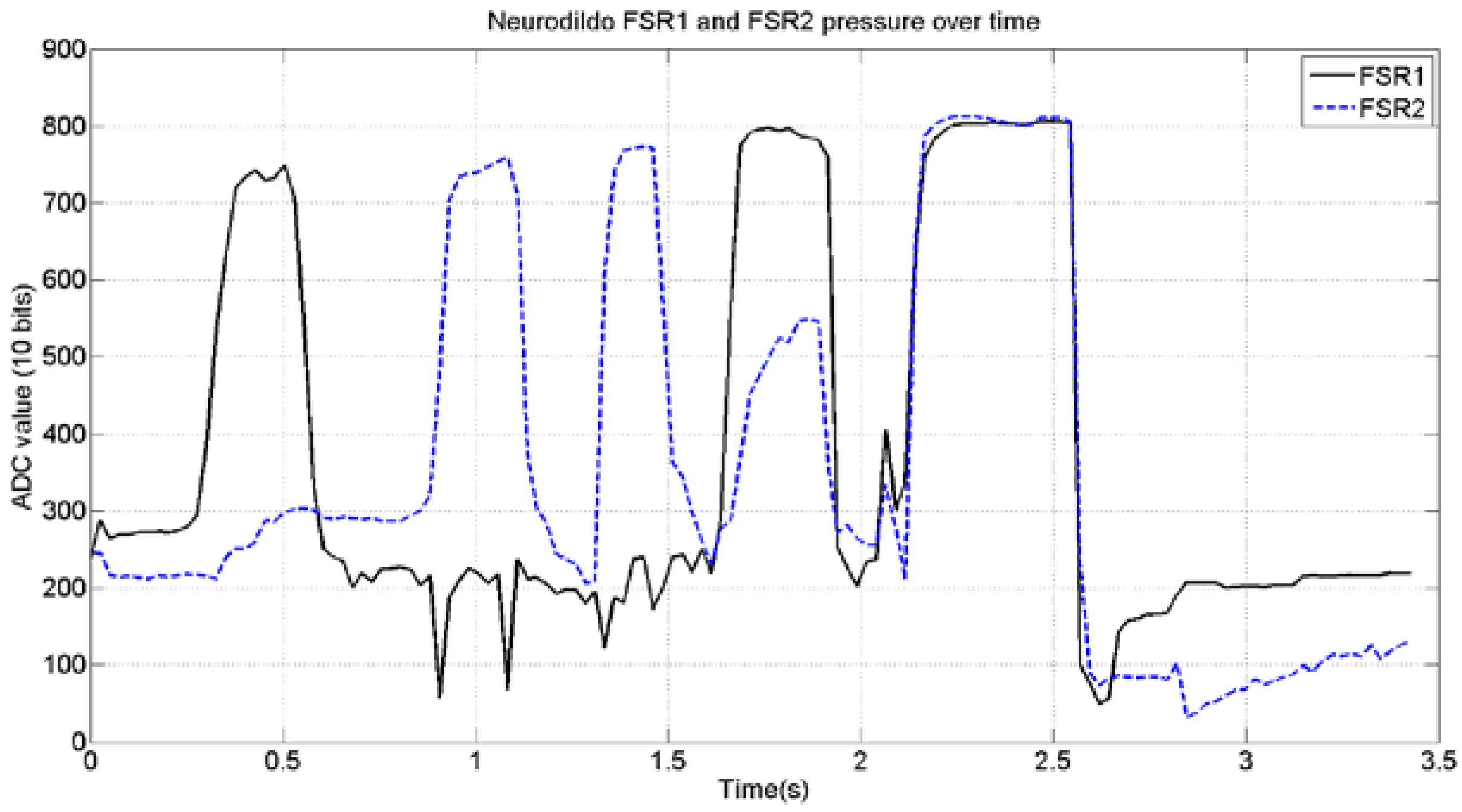
For evaluating the functioning of the two sensors at the same time and data transmission, we saved a log of the received packages and plotted a graph, which is represented in
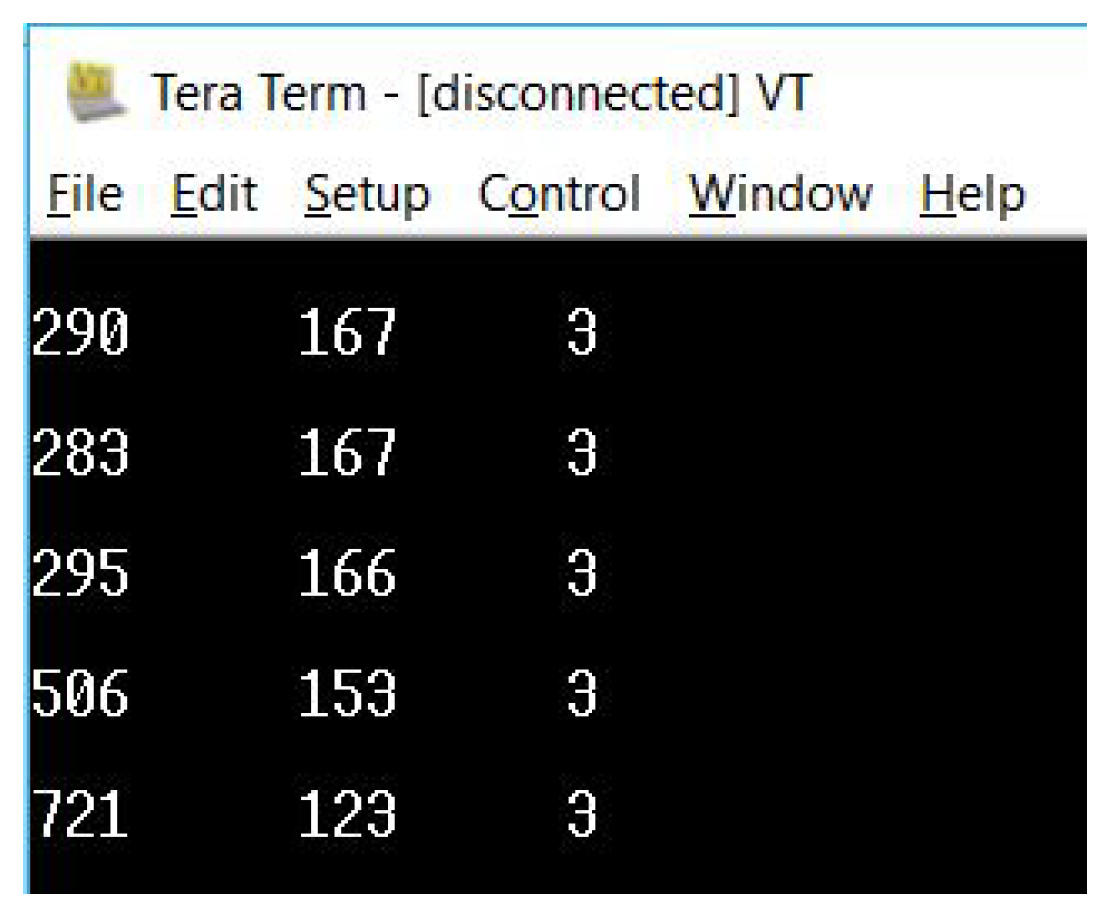
Figure 15. The black line is the signal of the first FSR sensor, and the blue dashed line is the second FSR sensor. It is shown that pressure can be sensed independently by each sensor, and when the same force is applied to both sensors, the data representing the voltage variation has the same value for each sensor. In the future, we plan to calibrate the pressure sensors and represent the data not by ADC counts but by absolute pressure or force applied to the sex toy. The example of the received data packages is represented in
Figure 16 by the screen capture of terminal software. The first column is the first sensor, the second column is the second sensor, and the third is a value representing the intensity of the pressure applied to both sensors. This value is used for controlling the intensity of the e-stim device.
4.3. BCI—Emotiv Test
The Emotiv Epoc headset is responsible for measuring the brain waves and detecting the pre-trained pattern associated with the brain waves. In our system, the Emotiv (or BCI) data is received by the Emotiv Control Panel and then passed to our python script. The python script is responsible for transmitting the data about the detected pattern to the sex toy and for receiving the pressure values data, which will be converted and passed to the e-stim device. The correct positioning of the Emotiv Epoc headset is represented in
Figure 17.
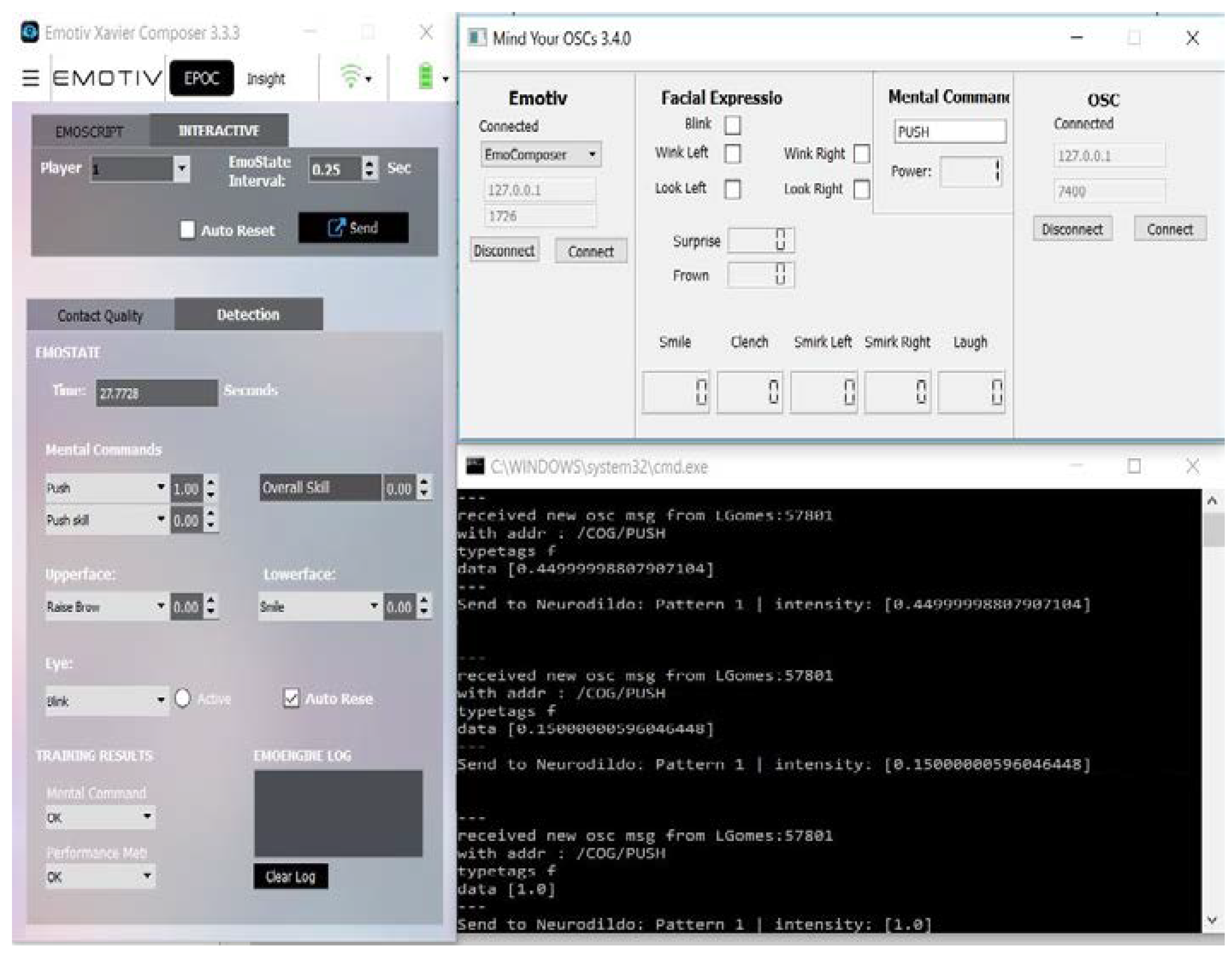
In order to debugging our python script and test the Neurodildo system, we used software called Emotiv Xavier Composer, Emotiv, San Francisco, CA, USA, which is capable of simulating different brain patterns and intensities, the same way that the BCI headset would detect them (
Figure 18).
The black window in
Figure 18 is the output of our python script. This window displays the brain pattern detected or simulated, which in this case is the “push” pattern. For each received pattern, the corresponding intensity is also received, which is a value ranging from 0.0 to 1.0. The pattern’s intensity is the value that our python script sends to the sex toy, and it converts it to vibration intensities. In
Figure 18, the first received intensity is 0.45 approximately, the second is 0.15, and the last is 1.0.
4.4. The E-Stim Test
The last part of the Neurodildo system is the e-stim device, which is a commercial TENS equipment driven by an Arduino circuit and connected to a computer by USB cable. Our python script has the function of integrating the system, and it sends the pressure intensity data to the e-stim device, which varies the pattern of muscles stimulation. The voltage of the electrodes attached to the skin can change its intensity and frequency, and different patterns cause different sensations in the muscles. The idea of the e-stim device is to provide a feedback response in the user wearing the BCI headset that corresponds to the pressure being applied to the sex toy by the second user. We measured two different patterns of muscle stimulation with an oscilloscope connected to the e-stim circuit (
Figure 19).
5. Discussion
5.1. Evaluation of the Neurodildo First Version Prototype
The design process of the first version of the Neurodildo produced a working prototype, which fulfilled all the functions that were initially proposed. During the experimental tests, we evaluated what functions worked better and the limitations of the prototype, including what should be improved in the future. At this stage of the project, no clinical tests were made because a partnership with a hospital must be carried out and an ethical approval must be obtained in order to work with patients with disabilities.
The parts of the prototype were first tested separately from the other parts, e.g., the vibration patterns independently from the BCI headset, and the pressure sensor independently from the e-stim device. All parts worked correctly, and after these tests, the system could be integrated and evaluated completely. After setting up the BCI headset, the sex toy was turned on, paired with the computer (the same one running the BCI software and connected to the e-stim controller module), and the electrodes of the e-stim were attached to any part of the body (for example, the right shoulder). By focusing in a pre-trained action, the user could remotely control the intensity of the sex toy vibration in a range of four intensities (off, weak, medium, and strong). On the sex toy side, the pressure against its surface caused a proportional intensity stimulation in the part of the body where the electrodes were attached. The more the sex toy is pressed, the more the muscles are electrically stimulated, and this connection is also wireless (by Bluetooth).
During all the tests, the system worked correctly as long as the batteries of the sex toy and the BCI headset had enough energy. One limitation that we verified is the brain signal quality reduction that occurred because of changes in the position of the BCI headset during usage or the drying of the saline solution, which is used for wetting the BCI electrodes and to increase their conductance. Recognition of the brain patterns (focus) was affected by the aforementioned limitations but also by the inherent hardware and software characteristics of the consumer-grade BCI headset (Emotiv EPOC) that we decided to use in this prototype.
The silicone sleeve used in this prototype, as mentioned before, has not medical grade, and it could not be in contact with sensitive or internal parts of the body. The reason for not using medical-grade silicone at this stage of the research was because we had readily available the basic silicone rubber for prototyping, which costs six times less than the medical version, and we would not clinically test the prototype. For the next stage, we will improve the design of the silicone sleeve for covering the entire plastic body of the sex toy and use appropriate material to be in contact with the body, so we can conduct the clinical tests safely. Battery consumption is also a limitation, keeping in mind that the Neurodildo has the possibility of becoming a product. The sex toy, when kept in sleep mode, discharged in less than one week. The electronic modules were not optimized to this project, so improving them would directly affect the size of the sex toy and its ergonomic aspects. As the project is intended to be as hands-free as possible, making the e-stim device able to communicate wirelessly with the other parts of the system is needed.
5.2. User Requirements and the New Design
Considering the limitations observed during the development and testing of the Neurodildo, and the fact that transforming a prototype into a valuable product is a complex task, new inputs are necessary for changing the design for a second version. It is indispensable when designing an assistive product that the user requirements and impressions should be taken into account. We can discuss the limitations of the current version of the Neurodildo alongside the user requirements presented for assistive devices [
9], since the consumers, i.e., people with physical disabilities, are shared.
Table 2 presents the factors that consumers consider determining for assistive devices, the limitations of these factors in the Neurodildo prototype, and what can be changed for a second version of our project (
Table 3).
The previous tables presented an overview of the main limitations and actions that should be taken in order to achieve an improved design. We analyzed the user requirements presented in an existing work [
9], but we need to consider developing our own methodology for listing the main consumer needs. By applying the Quality Function Deployment (QFD) methodology [
35] or Design Thinking techniques, the user requirements can be better characterized for our purposes and a more effective and valuable product can be developed. Reducing the steps for setting up and using the Neurodildo, which were presented in
Section 3.1, is an important change to be considered in the next version. People diagnosed within the same physical disability may have different limitations, and these limitations differences become more complex when considering a wide range of existing physical disabilities. Designing a device for assisting all or most of the limitations and medical conditions is a very hard task, if not impossible, and that is the why we have chosen to design a mind-controlled device, considering the premise that besides their physical limitations, people can still use their mental skills.
5.3. Issues Regarding the BCI Technology
Even though many technical limitations were observed in our current design, issues regarding the BCI headset, which is responsible for measuring the brain signals, were the majority. Designing our own headset, that would be less complex and would have dedicated features for our tasks, might be a solution for the excessive cost when comparing the consumer grade BCI to the rest of our system (sex toy and e-stim device). Reducing the complexity of setting up the BCI by reducing the number of electrodes and changing to the dry electrodes technology would directly affect the user experience and learnability of the system. However, by deciding to incorporate these changes into our design, we should deal with important trade-offs.
Researchers [
36,
37] already compared the accuracy of detecting brain patterns on a single-channel EEG recording system and a multiple electrodes system. In real-life applications, using a single-channel EEG (or BCI) device presents advantages over standard traditional systems, for example reduced cost, portability, and easier set-up. Traditional systems can do a better job capturing good quality EEG data because the high number of electrodes covering the entire scalp but are usually not a user-friendly and are complex systems with elevated cost and inconvenience.
According to another study [
38], BCI illiteracy is one of the major problems when applying BCI technology in real-life applications, for example to control other devices, and this problem must be resolved before BCI can be adopted to wide use by the public. BCI illiteracy is related to the high performance variability both between and within subjects. The authors argue that a consumer EEG device is only suitable for a beginner level brain signal measurement and research and usable as a control device brain reading only if a person has really no other means of signal input (like in a complete locked-in paralysis state, which is not always the case of people with SCI), otherwise other means of command recognition (blinking, eye tracking, sound, video, etc.) are much more viable.
5.4. Current Usage Scenarios and Future Possibilites
Regarding the current sex toy design, we also highlight five possible scenarios that may happen for users of the Neurodildo.
In
Table 4, we refer to healthy couple member as a person without disabilities and of any gender. In scenario 1, we explore the possibility of a couple in an LDR using the Neurodildo as an option to soften the lack of physical contact. In the second scenario, a person with SCI and locomotion limitations may use the remote-controlled sex toy in his or her relationship without the need to go outside his or her home. In the third scenario, we consider a person with SCI or any other disability that has a limited physical condition and/or has failed to engage in a relationship. This person could contact a sex worker and have virtual sex. In both scenarios 2 and 3, it would be recommended that the person with disability had the help of a carer or a trusted person to set up the Neurodildo, the BCI (EEG) headset, and the e-stim device. Improving the design after evaluating the user requirements will enable other scenarios, for example, making the sex toy more portable might enable a better masturbating experience for the user without being uncomfortable while wearing the hardware of the system (scenarios 4 and 5). Even though the Neurodildo is configured as a vibrator, which is a sex device mostly used by women, we consider that the prototype can be used by any gender and any sexual orientation, disabled or not.
As the system is being developed to achieve maximum effectiveness, portability, and compatibility with other systems, it possible to integrate the Neurodildo with sex robots in the near future [
39]. People with and without disabilities, besides other means of interaction, might interact with sex robots by sending commands for sexual actions or any other action that the robot is programmed to do. Another possible interaction is the robot recognizing the emotions of the human, which could be measured and transmitted by the BCI device, and then reacting and learning from the human input. Even though both the BCI and the Sex Robots technology are not sophisticated enough yet, we should consider that this integration and application is real [
40], and we must advance in studies related to ethical, moral, and social issues that may affect our future. Are we prepared to live with human-like robots and eventually fall in love and have sex with them? What will the rights of both humans and robots be? Will every human-like robot be intended to have sex? Will the robots be safe and/or helpful for people with disabilities? These and many other questions should be studied before the deployment of this controversial technology.
5.5. Future Work
The prototype presented in this paper is the first one of a work in progress. There are some aspects that we will improve—for example, by designing our own EEG/BCI headset based on the open-source projects, and this should considerably reduce the price of the final product. Another point that should be changed is that the computer will be removed from the system and substituted with an embedded hardware solution capable of processing the EEG signals and connecting to the internet by Wi-Fi or Bluetooth and with a smartphone. The design and aesthetics of the sex toy will also be improved. As we used commercial electronic modules, the size of the hardware was limited to the size of all modules and batteries. Building our own electronics board would reduce the size of the sex toy, and we may also add new sensors and actuators for creating new stimulation methods. The physical design of the sex toy will also be changed by taking into account ergonomic aspects for people with or without disabilities and trendy sex toys in the market. We will develop a smartphone app, so the working distance of the Neurodildo can be limitless when having internet access. Finally, we will test the Neurodildo with volunteers (disabled and not) to consider what we should keep and what to change in the next versions.
6. Conclusions
In this paper, we presented the Neurodildo by explaining its concept, design process, usage scenarios, and technical evaluation. We also discussed the importance of considering the user requirements when designing an assistive product. The Neurodildo is a sex toy remotely controlled by brain waves, which enables long-distance relationship couples to experience sensations that video calls cannot provide. The Neurodildo might be used by people with disabilities, for example with spinal cord injury, who have physical limitations and usually cannot handle commercial sex toys by themselves. We discussed the limitations of the current prototype and effectiveness of BCI for controlling other devices. We also introduced a discussion on the application of sex robots for people with disabilities and how the Neurodildo could be used for controlling these robots in the future. The importance of the work is the design of an innovative technology that might improve the sexual wellness of people with disabilities and improve their quality of life, enabling more possibilities for interaction with other people.
Author Contributions
Conceptualization, L.M.G. and R.W.; Data curation, L.M.G.; Formal analysis, L.M.G.; Investigation, L.M.G.; Methodology, L.M.G.; Project administration, L.M.G.; Resources, L.M.G. and R.W.; Software, L.M.G.; Supervision, L.M.G.; Validation, L.M.G. and R.W.; Visualization, L.M.G.; Writing—original draft, L.M.G.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pons, J.L.; Raya, R.; González, J. (Eds.) Emerging Therapies in Neurorehabilitation, 1st ed.; Springer: Berlin, Germany, 2014. [Google Scholar]
- Anderson, K.D.; Borisoff, J.F.; Johnson, R.D.; Stiens, S.A.; Elliott, S.L. The impact of spinal cord injury on sexual function: Concerns of the general population. Spinal Cord 2007, 45, 328–337. [Google Scholar] [CrossRef] [PubMed]
- Anderson, K.D. Targeting Recovery: Priorities of the Spinal Cord-Injured Population. J. Neurotrauma 2004, 21, 1371–1383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cooper, E.; Guillebaud, J. Sexuality and Disability—A Guide for Everyday Practice, 1st ed.; Radcliffe Medical Press: Oxon, UK, 1999. [Google Scholar]
- Vodusek, D.B.; Boller, F. Neurology of Sexual and Bladder Disorders; Elsevier: New York, NY, USA, 2015; Volume 130. [Google Scholar]
- Selinger, C. Sex Toys and Sexual Aids for Adults with SCI. Available online: http://www.spinalcord.org/video-sex-toys-sexual-aids-adults-sci (accessed on 26 July 2017).
- Hitachi Magical Wand. Available online: http://www.magicalwandoriginal.com (accessed on 29 July 2017).
- Love Bumper. Available online: https://www.lovebumper.com (accessed on 29 July 2017).
- Andrew, I.; Batavia, J.D.; Guy, S.H. Toward the development of consumer-based criteria for the evaluation of assistive devices. J. Rehabil. Res. Dev. 1990, 27, 425–436. [Google Scholar]
- Ferti Care Personal Vibrator. Available online: http://www.ferticare.pl (accessed on 28 July 2017).
- Tantus Rumble. Available online: https://www.tantusinc.com/pages/tantus-rumble (accessed on 14 June 2018).
- Liberator Sex Furniture, Wedges, Ramps, Pillows. Available online: https://www.liberator.com/liberator-sex-furniture.html (accessed on 14 June 2018).
- Eva II—Dame Products. Available online: https://www.dameproducts.com/products/eva-ii (accessed on 14 June 2018).
- Hot Octopuss Pulse Vibrator. Available online: https://www.hotoctopuss.com/ (accessed on 14 June 2018).
- Humpus–Probably the Best Sex Machine Ever Invented. Available online: http://www.humpus.com/ (accessed on 14 June 2018).
- Neustaedter, C.; Greenberg, S. Intimacy in Long-Distance Relationships over Video Chat. In Research Report 2011-1014-26; Department of Computer Science, University of Calgary: Calgary, AB, Canada, 2011. [Google Scholar]
- Lush. Available online: https://www.lovense.com/bluetooth-remote-control-vibrator (accessed on 29 July 2017).
- We-Vibe Sync. Available online: http://we-vibe.com/sync (accessed on 29 July 2017).
- Ohmibod. Available online: http://www.lovelifetoys.com/For-Her (accessed on 29 July 2017).
- Dating Websites—United Spinal Association—Spinal Cord Resource Center. Available online: http://www.spinalcord.org/resource-center/askus/index.php?pg=kb.page&id=2538 (accessed on 29 July 2017).
- Nicolas-Alonso, L.F.; Gomez-Gil, J. Brain Computer Interfaces, a Review. Sensors 2012, 12, 1211–1279. [Google Scholar] [CrossRef] [PubMed]
- Emotiv EPOC + EEG Headset. Available online: https://www.emotiv.com/epoc/ (accessed on 29 July 2017).
- Neurosky MindWave. Available online: http://neurosky.com/biosensors/eeg-sensor/biosensors/ (accessed on 29 July 2017).
- Olimex OpenEEG. Available online: https://www.olimex.com/Products/EEG/ (accessed on 29 July 2017).
- OpenEEG Project. Available online: http://openeeg.sourceforge.net/doc/index.html (accessed on 29 July 2017).
- OpenBCI. Available online: http://openbci.com/ (accessed on 29 July 2017).
- Ranky, G.N.; Adamovich, S. Analysis of a commercial EEG device for the control of a robot arm. In Proceedings of the 2010 IEEE 36th Annual Northeast Bioengineering Conference, New York, NY, USA, 26–28 March 2010. [Google Scholar]
- Millán, J.D.; Rupp, R.; Müller-Putz, G.; Murray-Smith, R.; Giugliemma, C.; Tangermann, M.; Vidaurre, C.; Cincotti, F.; Kubler, A.; Leeb, R.; et al. Combining brain-computer interfaces and assistive technologies: State-of-the-art and challenges. Front. Neurosci. 2010, 4, 161. [Google Scholar] [CrossRef] [PubMed]
- Companies Explore Potential Benefits of Mind-Controlled Sex Toys. Available online: https://futureofsex.net/remote-sex/companies-explore-potential-benefits-mind-controlled-sex-toys/ (accessed on 29 July 2017).
- Sex Toy: Mind Controlled Dildo! Yep, This Exists. Available online: https://www.youtube.com/watch?v=-40vsVdf5vs (accessed on 29 July 2017).
- Levy, D. Love and Sex with Robots: The Evolution of Human-Robot Relationships, 1st ed.; Harper Collins: New York, NY, USA, 2007. [Google Scholar]
- Danaher, J.; McArthur, N. Robot Sex—Social and Ethical Implications, 1st ed.; The MIT Press: New York, NY, USA, 2017. [Google Scholar]
- Round Force-Sensitive Resistor (FSR)—Interlink 402. Available online: https://www.adafruit.com/product/166 (accessed on 30 July 2017).
- Electrical Stimulation. Available online: https://www.verywell.com/electrical-stimulation-2696122 (accessed on 30 July 2017).
- Akao, Y. Quality Function Deployment (QFD): Integrating Customer Requirements into Product Design, 1st ed.; Productivity Press: New York, NY, USA, 1990. [Google Scholar]
- Anwar, D.; Garg, P.; Naik, V.; Gupta, A.; Kumar, A. Use of portable EEG sensors to detect meditation. In Proceedings of the 10th International Conference on Communication Systems & Networks (COMSNETS), Bengaluru, India, 3–7 January 2018. [Google Scholar]
- Przegalinska, A.; Ciechanowski, L.; Magnuski, M.; Gloor, P. Muse Headband: Measuring Tool or Collaborative Gadget? In Collaborative Innovation Networks. Studies on Entrepreneurship, Structural Change and Industrial Dynamics; Grippa, F., Leitão, J., Gluesing, J., Riopelle, K., Gloor, P., Eds.; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Maskeliunas, R.; Damasevicius, R.; Martisius, I.; Vasiljevas, M. Consumer-grade EEG devices: Are they usable for control tasks? PeerJ 2016, 4, e1746. [Google Scholar] [CrossRef] [PubMed]
- Sex Robots ‘Will Be Able to Pleasure People through Mind Control’: Joshua Nevett—Daily Star. Available online: https://www.dailystar.co.uk/news/latest-news/668500/sex-robots-mind-control-pleasure-neurodildo-conference-london-leonardo-gomes (accessed on 15 June 2018).
- Güneysu, A.; Akin, H.L. An SSVEP based BCI to control a humanoid robot by using portable EEG device. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013. [Google Scholar]
Figure 1.
The concept of the Neurodildo: a brain-controlled sex toy.
Figure 1.
The concept of the Neurodildo: a brain-controlled sex toy.
Figure 2.
Block diagram of the Neurodildo and its main parts.
Figure 2.
Block diagram of the Neurodildo and its main parts.
Figure 3.
3D model of the sex toy plastic body, 3D printing of the parts, and the plastic body assembled.
Figure 3.
3D model of the sex toy plastic body, 3D printing of the parts, and the plastic body assembled.
Figure 4.
User holding the sex toy. Dimensions are 35 mm external diameter and 127 mm length.
Figure 4.
User holding the sex toy. Dimensions are 35 mm external diameter and 127 mm length.
Figure 5.
Electronic modules of the Neurodildo (top and bottom view), the electronics housing, and the connections with the vibration motor and battery.
Figure 5.
Electronic modules of the Neurodildo (top and bottom view), the electronics housing, and the connections with the vibration motor and battery.
Figure 6.
Force-sensitive resistor (FSR) sensors attached to the sex toy plastic body.
Figure 6.
Force-sensitive resistor (FSR) sensors attached to the sex toy plastic body.
Figure 7.
The silicone casting process for creating the sleeve of the sex toy.
Figure 7.
The silicone casting process for creating the sleeve of the sex toy.
Figure 8.
Neurodildo sex toy assembled.
Figure 8.
Neurodildo sex toy assembled.
Figure 9.
Cognitive Suite for brain-pattern training and keystroke configuration.
Figure 9.
Cognitive Suite for brain-pattern training and keystroke configuration.
Figure 10.
Emotiv EPOC BCI (Brain-Computer Interface) headset.
Figure 10.
Emotiv EPOC BCI (Brain-Computer Interface) headset.
Figure 11.
The commercial E-stim device; the Arduino Nano connected to the control panel of the E-stim; the electrodes placed on the shoulder of a user.
Figure 11.
The commercial E-stim device; the Arduino Nano connected to the control panel of the E-stim; the electrodes placed on the shoulder of a user.
Figure 12.
Vibration intensities in the water: first is the weak, second the medium, and third the strong.
Figure 12.
Vibration intensities in the water: first is the weak, second the medium, and third the strong.
Figure 13.
Voltage oscillation when force is applied to one of the FSR sensors. The x axis is time (500 ms/Square Division), and the y axis is voltage (1 V/Square Division).
Figure 13.
Voltage oscillation when force is applied to one of the FSR sensors. The x axis is time (500 ms/Square Division), and the y axis is voltage (1 V/Square Division).
Figure 14.
Pressure data of one sensor received by Bluetooth.
Figure 14.
Pressure data of one sensor received by Bluetooth.
Figure 15.
Pressure data applied to the two sensors attached to the sex toy.
Figure 15.
Pressure data applied to the two sensors attached to the sex toy.
Figure 16.
Pressure data from the sex toy, received by the computer using the terminal software.
Figure 16.
Pressure data from the sex toy, received by the computer using the terminal software.
Figure 17.
User wearing the Emotiv EPOC (BCI) headset.
Figure 17.
User wearing the Emotiv EPOC (BCI) headset.
Figure 18.
The software set responsible for collecting the brain patterns and sending them to the sex toy.
Figure 18.
The software set responsible for collecting the brain patterns and sending them to the sex toy.
Figure 19.
Two different patterns of the e-stim muscle stimulation: the first is weaker and continuous; the second is stronger and with faster oscillation.
Figure 19.
Two different patterns of the e-stim muscle stimulation: the first is weaker and continuous; the second is stronger and with faster oscillation.
Table 1.
Conversion values of the brain-pattern duration (Focusing) to vibration intensity (motor voltage).
Table 1.
Conversion values of the brain-pattern duration (Focusing) to vibration intensity (motor voltage).
| Focusing (Seconds) | Value (Bits) | Vibration Intensity (%) | Motor Voltage (V) |
|---|
| 0 | 0 | 0 | 0 |
| 1 < t < 3 | 70 | 27.34 | 1.011 |
| 3 < t < 5 | 128 | 50 | 1.85 |
| t > 5 | 255 | 100 | 3.7 |
Table 2.
Description of technical limitations of the first Neurodildo version and the user requirements.
Table 2.
Description of technical limitations of the first Neurodildo version and the user requirements.
| User Requirements | Neurodildo v1 |
|---|
| Effectiveness | Eventual problems on brain pattern recognition |
| Affordability | The consumer grade BCI is expensive |
| Operability | Separate software modules and complex BCI setup |
| Dependability | Plastic parts are not resistant enough and easily removable |
| Portability | Separate hardware modules, computer needed for integrating the system |
| Durability | Sex toy is not water proof, battery usage is not optimized |
| Compatibility | This version need a computer with Python software installed |
| Flexibility | The current design has no flexible options |
| Ease of Maintenance | Maintenance wasn’t taken into account in this version |
| Securability | No security precautions were taken |
| Learnability | The BCI is complex for setting up, no user instructions about the sex toy |
| Personal Acceptance | The consumer would need assistance on setting up the system |
| Physical Comfort | The BCI exerts constant pressure of the electrodes against the scalp |
| Supplier Repair | Does not apply |
| Physical Security | Electrical Stimulation may cause undesirable effects, e.g., increase the heart rate |
| Consumer Repair | Does not apply |
| Easy of Assembly | Does not apply |
Table 3.
Examples of design improvements for the second Neurodildo version and the user requirements.
Table 3.
Examples of design improvements for the second Neurodildo version and the user requirements.
| User Requirements | Neurodildo v2 |
|---|
| Effectiveness | Improve design of the BCI and communication |
| Affordability | To design our own BCI, with simplified functions |
| Operability | Integrate the software, develop our own pattern recognition and simplify the BCI design using dry electrodes |
| Dependability | Better design by changing from 3D printer method to injection molding |
| Portability | Embedded software, hardware integration and complexity reduction, add a mobile app for setting up the system |
| Durability | Improve battery consumption and charging, make the sex toy waterproof and washable |
| Compatibility | Design a cross-platform mobile app for controlling the system |
| Flexibility | Different color, sizes, programmed patterns, etc. |
| Ease of Maintenance | Make the sex toy washable |
| Securability | Encrypted communication between modules, user account |
| Learnability | Reduce BCI complexity, accessible tutorials on how to use the sex toy |
| Personal Acceptance | Reduce the complexity and making the system more accessible |
| Physical Comfort | Reduce the number of electrodes and improve the BCI design |
| Supplier Repair | Product warrant and replacement policies |
| Physical Security | Using same values for electrical stimulation, to inform the precautions needed regarding the electrodes positioning |
| Consumer Repair | Does not apply |
| Easy of Assembly | Does not apply |
Table 4.
Neurodildo usage scenarios.
Table 4.
Neurodildo usage scenarios.
| Scenario No. | User A | User B |
|---|
| 1 | Healthy couple member 1 | Healthy couple member 2 |
| 2 | Couple member with SCI | Healthy couple member |
| 3 | Person with disability | Sex worker |
| 4 | Person with disability 1 | Person with disability 2 |
| 5 | Person with disability | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}