This section presents the results of experiments conducted to validate our proposed method. The validation is divided into two parts: clustering performance and online feasibility. The former evaluates offline clustering by both the Rand Index (RI) [
13] and Adjusted Rand Index (ARI) [
14] to confirm the effect on clustering performance when changing the data set. The latter assesses the feasibility of online clustering by the reduction ratio of the data set, the precision, and the convergence time.
3.1. Offline Clustering
Offline clustering in this paper is defined as clustering of logged data after the game, which means that we can exploit all geometric data broadcasted by SSL-Vision during the game. Action sequences can be extracted from the data in any duration, and all of them are used for clustering. To consider the duration for clustering strategies, set-plays such as throw-ins and corner kicks tend to represent some kinds of typical patterns. It can be considered that the set-plays are easier to cluster by a human than the other plays. From this viewpoint, we focus on clustering set-plays.
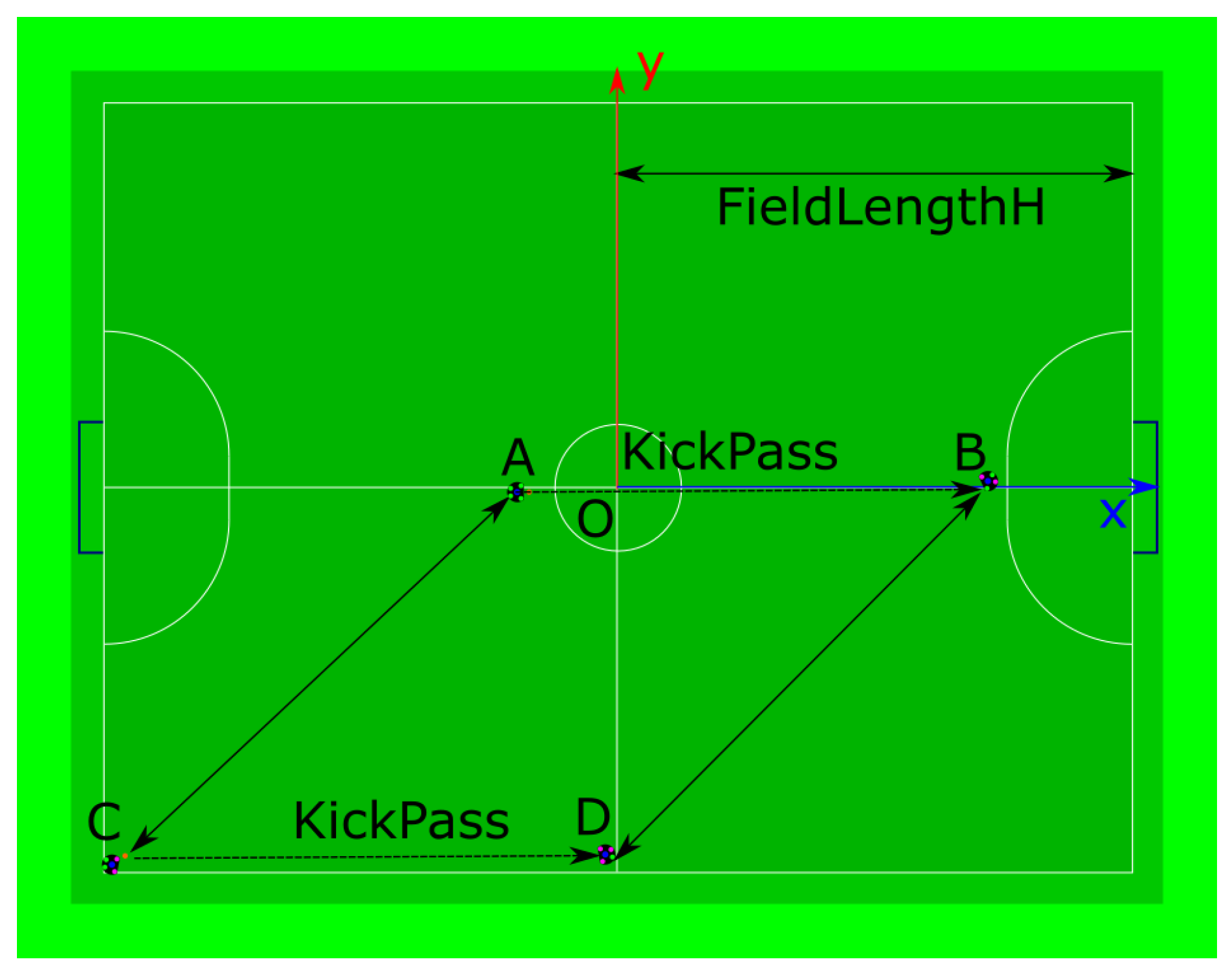
We used actual and test data for evaluation. Actual data were logged in the official SSL games of RoboCup 2015 and 2016. In general, there can be some noise and missing parts in the actual data. For a preliminary test before evaluating clustering of actual data, we created test data without any noise or missing parts. The test data were composed of 15 plays
that belong to three strategies as follows:
where
,
, and
stand for shoot after passing from a corner to the far side (
Figure 5a), shoot after passing from a corner to the near side (
Figure 5b), and shoot after passing from a corner to the near center circle (
Figure 5c), respectively.
If the proposed method works ideally, each play should be grouped into the corresponding strategy.
By using the Rand Index (RI) [
13] and Adjusted Rand Index (ARI) [
14], the clustered result is evaluated in comparison with the ground truth. Note that:
This comparative evaluation means whether or not the proposed algorithm can cluster plays as well as a human does. RI and ARI are well-known performance indexes for clustering. If the value of each index is one, it means that the clustered result matches the ground truth. In related work [
4], RI is used for the performance index. For performance comparison with the method in [
4], we adopt RI here as well; we give another evaluation based on ARI because ARI overcomes a drawback of RI.
First, experiments using test data were performed with the parameters in
Table 3 to evaluate the clustering performance of the proposed method in comparison with the previous method [
6]. Note that the following conditions are adopted for a fair comparative evaluation:
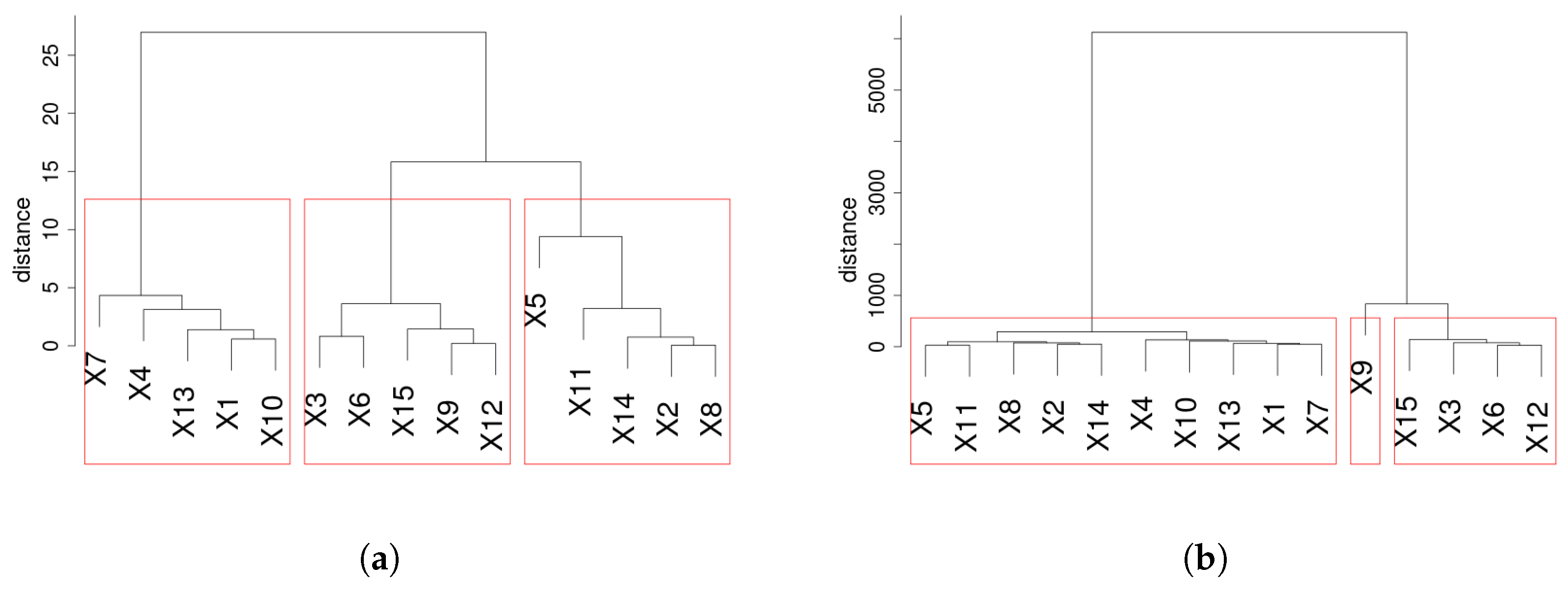
Figure 6 shows experimental results.
Figure 6a is a dendrogram given by the proposed method;
Figure 6b is a dendrogram given by the previous method in [
6]. Strategies
and
are similar in terms of the trajectories of robots, but are different in terms of the trajectory of a ball. The previous method [
6] cannot cluster these strategies separately. The reason for this is that a ball direction (or kick action) is not used as a feature for clustering in the previous method [
6]. On the other hand, the proposed method achieves ideal clustering.
Next, by using logged data, we evaluate the proposed method in comparison with the previous method in [
6]. The experimental conditions are the same as in the case of the test data.
Table 4 summarizes the result. The proposed method is better than the previous one, especially for the values of ARI, which indicates that the proposed method using action sequences has the same or better performance than the previous method using geometric data, as in [
6], despite the smaller amount of data.
Finally, we tested the proposed method with the number of clusters
obtained from Equation (14).
Table 5 shows the values of RI ranging from 0.835 to 0.943 (the average value: 0.885). From a comparison with
Table 4, the difference of
affects the result, but the performance is almost the same. In related work [
4], the values of RI for some SSL games were reported. Focusing on only scenes close to our experimental settings (e.g., the number of set-plays), the values of RI range from 0.87 to 0.94 (average value: 0.907). This means that the performance of the proposed method is close to that of the method in [
4].
3.2. Online Clustering
This subsection validates the online feasibility of the proposed method. Online clustering involves grouping an ongoing play into clusters successively during the game. In this type of clustering, the amount of data should be small to reduce storage space and also achieve fast computation. The clustered results would be useful for dominating the game against an opponent team.
Regarding the amount of data for clustering, a method using action sequences has an advantage over one using geometric data.
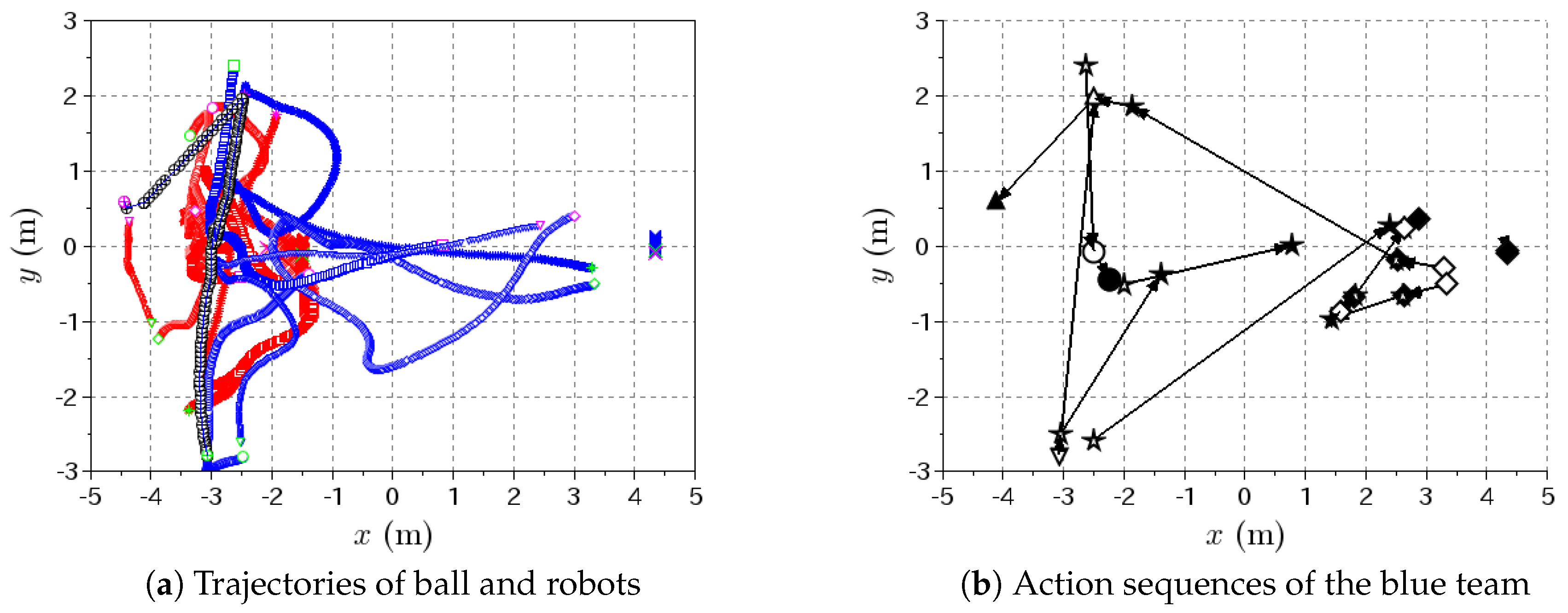
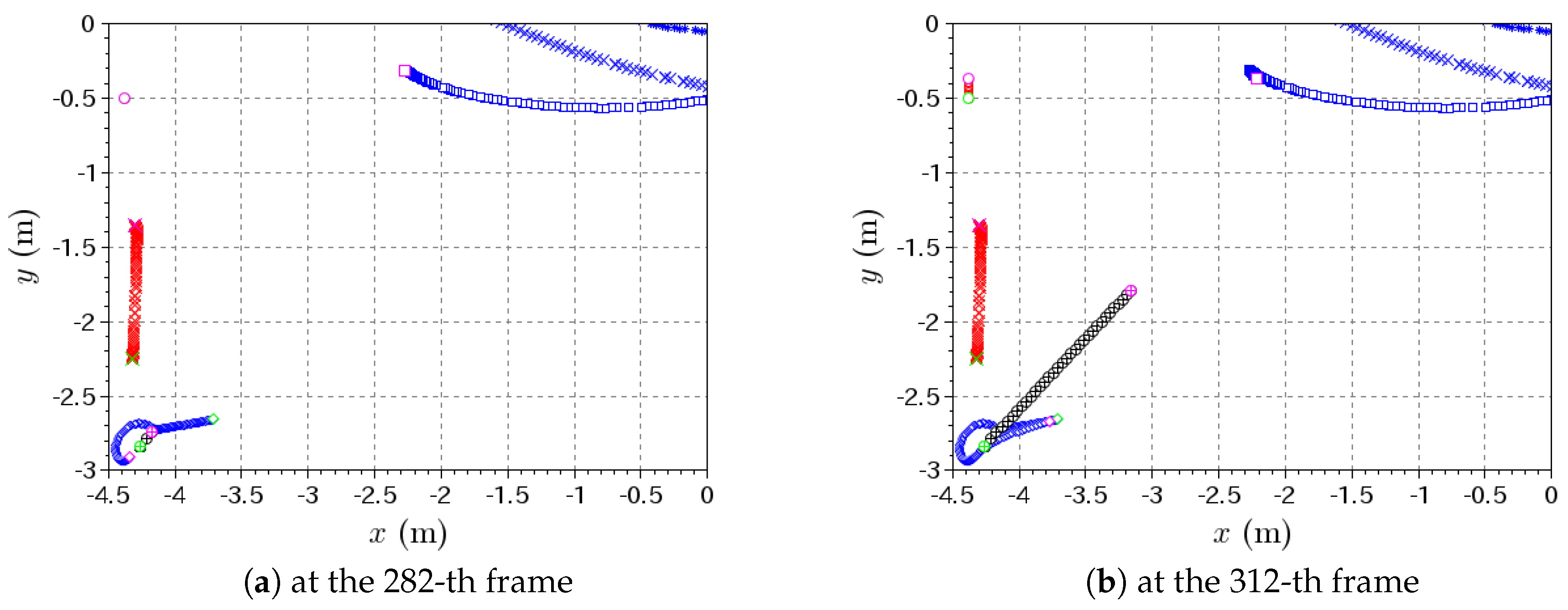
Figure 7 shows trajectories and corresponding action sequences in a set-play.
Figure 7b depicts the action sequences extracted from the trajectories (i.e., geometric data) of the blue team in
Figure 7a. The trajectories in
Figure 7a are made up of 443 sampling data points expressed as
coordinates. If we use all coordinates of the blue team, the amount of data are
21,264
, where a unit
frame is defined as 1/60 s—the sampling period of SSL-Vision data. On the other hand, the action sequences in
Figure 7b are made up of 15 actions, where the amount of data are
. In this case, the reduction ratio is (387/21,264)
%, which means that action extraction compressed
% of geometric data.
Table 6 shows the reduction ratios for several game logs from RoboCup 2015 and 2016. Note that these reduction ratios were averaged for the number of set-plays in each game. The results indicate that action extraction compresses the full geometric data to less than 2%.
Next, to evaluate the online performance of the proposed method, an experiment was conducted according to the following three steps: (i) analyzing the logged data every
frames, (ii) arranging action sequences when the first kick of a play is detected, and (iii) evaluating the clustered results in comparison with the ground truth. Step (ii) is for adapting the current play to the previous ones. In Step (iii), the following precision is adopted as a performance index for clustering:
where TP and FP are defined as follows:
TP: the number of true positives, i.e., the number of plays that belong to both an inferred cluster and a true one.
FP: the number of false positives, i.e., the number of plays that belong not to an inferred cluster but to a true one.
Note that:
If the current play belongs to an inferred cluster, the precision with respect to the cluster can be computed. Otherwise, precision cannot be computed. This case is excluded from evaluation of precision.
Precision is computed every
frames. The stored values are averaged not only per elapsed frame but also per play, as follows:
where
p and
f represent the numbers of plays and elapsed frames, respectively. Equation (
18) is referred to as averaged precision in this paper.
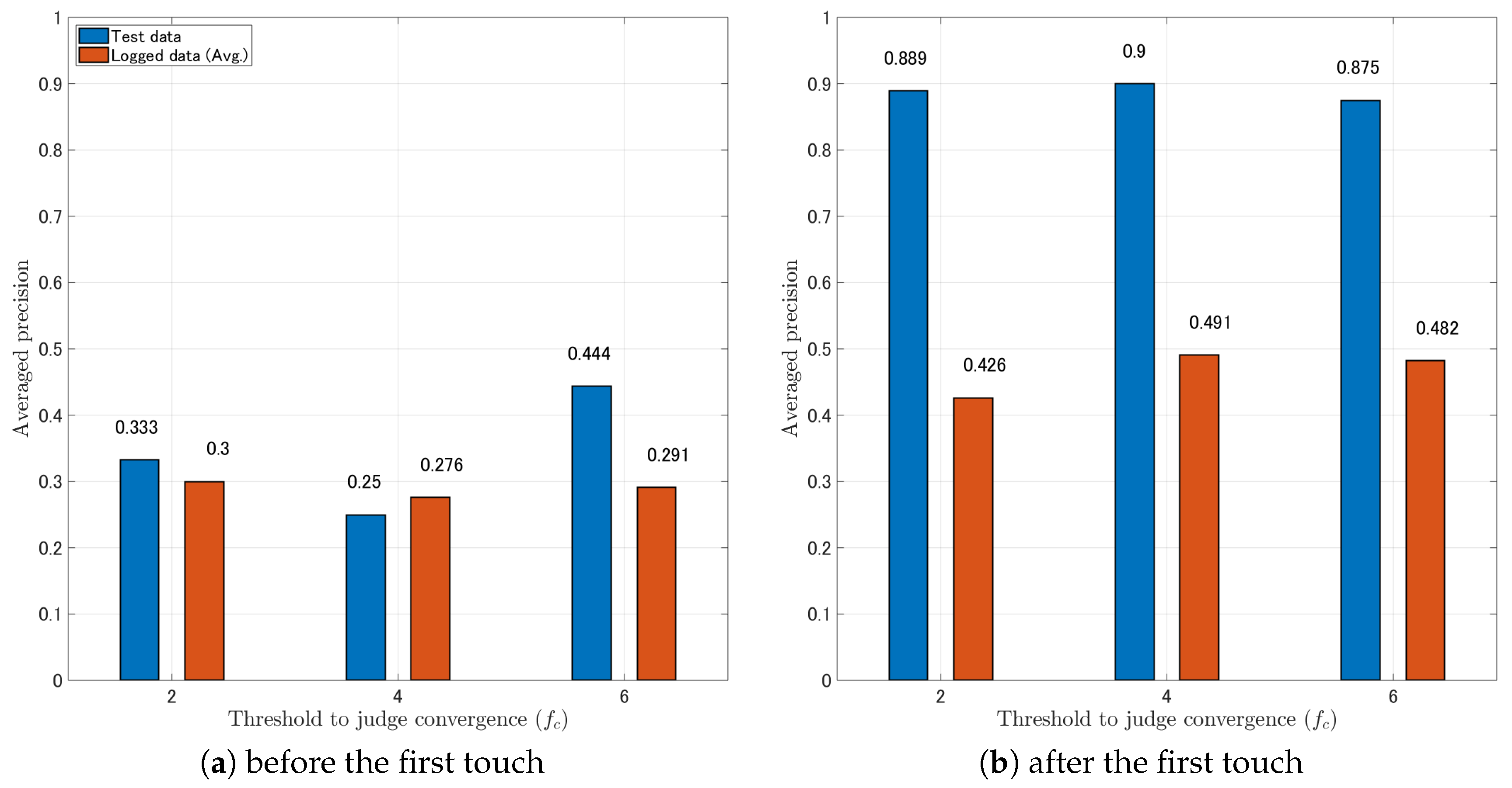
Additionally, how long it takes for the current play to converge into an inferred cluster is also important for online clustering. Such an elapsed period is referred to as . We here deal with three cases: .
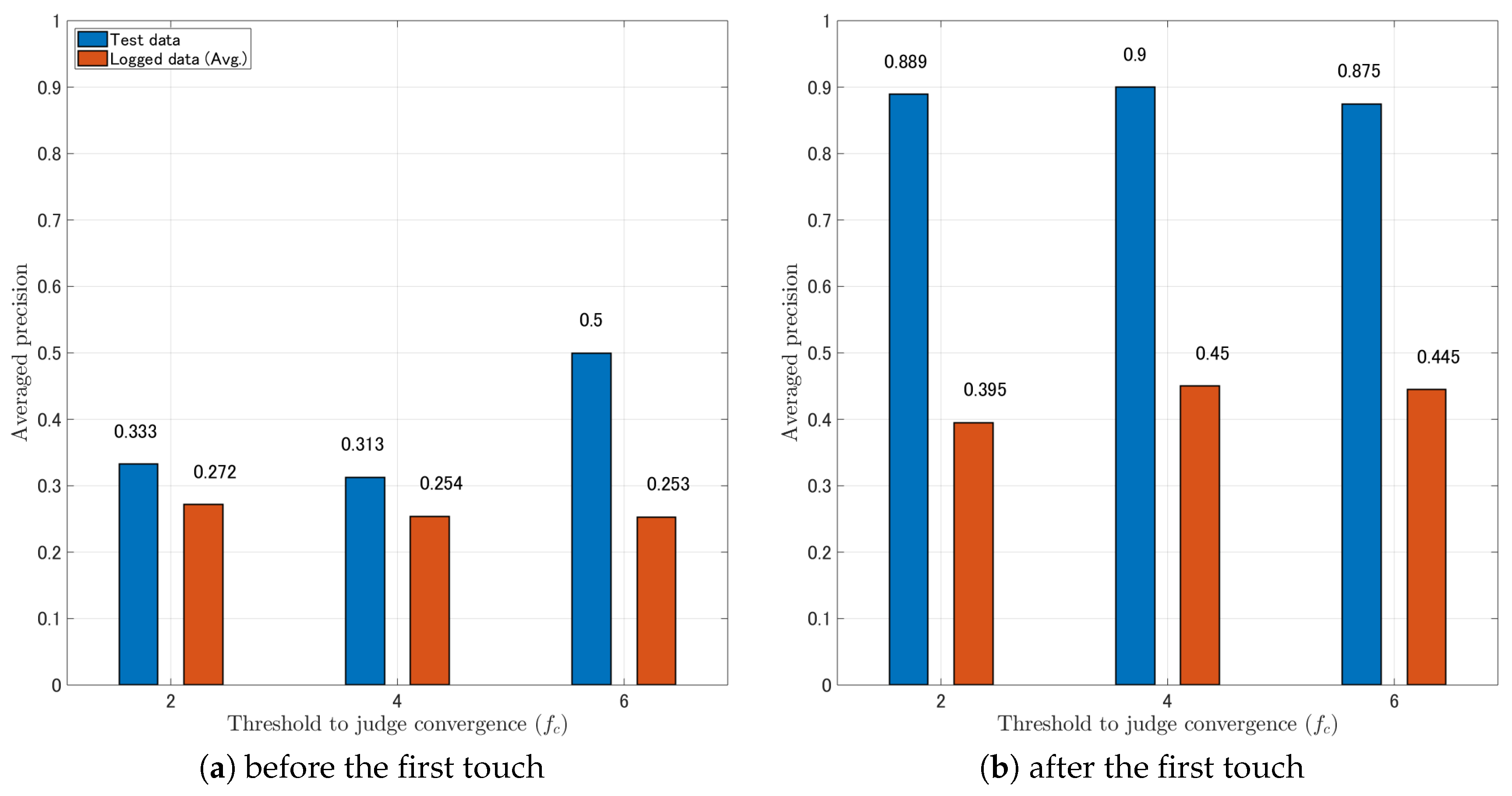
Any set-play can be divided into two phases by the first touch after restarting the game: one phase before the first touch and another phase after the first touch. In the phase before the first touch, the attacking team normally prepares for offense, e.g., coordinating the formation of the teammates according to a certain strategy. After one player of the attacking team touches the ball, the other players start their individual actions. Our objective is to estimate the strategy of the attacking team before the first touch or immediately after the first touch. For both the test data and logged data which are the same as in the previous subsection,
Figure 8 shows the averaged precision. From the results in
Figure 8, it can be seen that the averaged precision after the first touch is greater than the one before the first touch. This indicates that meaningful features of the strategy appeared since the first touch. In particular, regarding test data, the difference of averaged precision between before the first touch and after the first touch is quite large. This is because three kinds of strategies that compose the test data are similar before the first touch but totally differ after the first touch.
Table 7 shows the convergence time. Focusing on the results after the first touch, we can find the following relationship between the averaged precision in
Figure 8 and convergence time in
Table 7. The greater the value of
becomes, the longer the convergence time is; the value of the averaged precision slightly grows from
to
while reducing from
to
. In particular, the result in the case of
implies that the proposed algorithm used the correct strategy at 45% in less than half a second after the first touch.
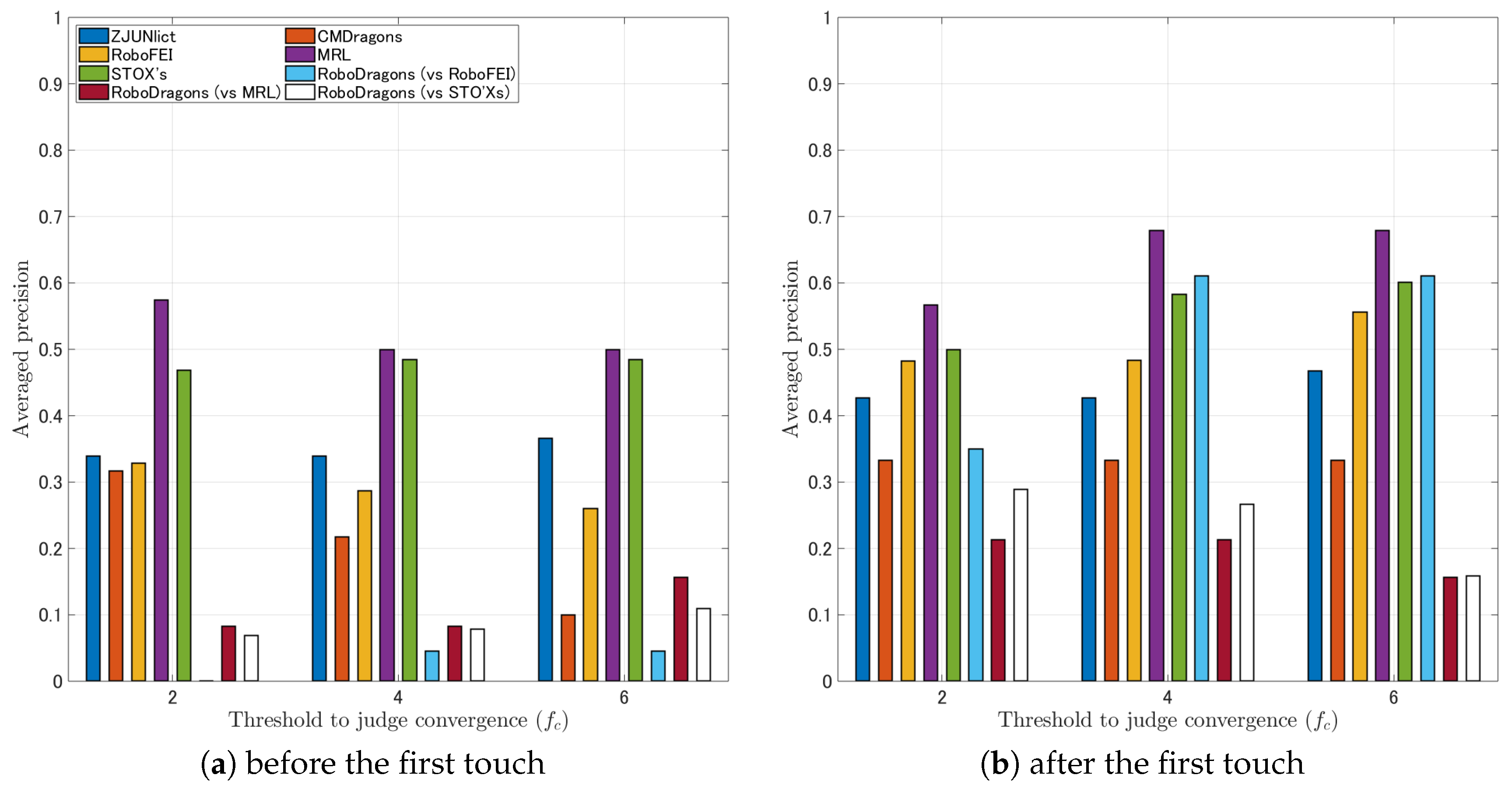
The values of precision in
Figure 8 were calculated by using all past set-plays in the cluster into which the ongoing set-play is grouped. We can also consider another way that involves picking the nearest play out of the cluster. The experimental results obtained in this way are depicted in
Figure 10. By contrast with
Figure 8, all values of precision are improved.
3.3. A Possible Application to Countering: Shoot-Cut
The proposed method can be applied to countering an opponent’s strategy. This subsection demonstrates shoot-cut as one defending strategy.
Numerical experiments were conducted on grSim [
15]—an SSL simulator based on the Open Dynamics Engine (ODE). Four kinds of set-play strategies labeled
,
,
, and
were executed five times in this order. The strategies
,
, and
are the same strategies used in test data named
,
, and
, respectively. The
is a new strategy including two passes and also is more complex than the other three strategies. Letting the obtained set-plays be referred as
,
, …, and
, the relationship between them and
is described as
Figure 12 represents situations of set-plays
and
in a part of the field. There is a goal mouth located from
to
. At the beginning of a set-play, a goalkeeper and a defender of a defending team are placed at
and
, respectively; an attacking team deploys two players at
, and
, respectively. After restarting the game, the first touch is a kick by an attacker at
for passing a ball to another attacker at
. Then, the second attacker passes the ball to the first attacker again. Finally, the first attacker shoots the ball towards the goal of the defending team.
From
Figure 12a, it can be seen that a defender did almost nothing against a shot ball from an attacking player at
. The reason is that
was the first set-play from Strategy
. On the other hand,
Figure 12b shows that a defender tried to cut a shot ball. This means that a countering action of the defender was improved as a result of the increased number of stored set-plays from the same strategy. In addition, an action “KickShoot” can be easily found from the past action sequences that are most similar to the current action sequences.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}