Is Artificial Man Still Far Away: Anthropomimetic Robots Versus Robomimetic Humans

{kind=link}
{kind=link}
Abstract
:1. Introduction and Background
- -
- shape and motion,
- -
- intelligence, and
- -
- communication.
2. Human-Like Shape and Motion—Current Status and Trends
2.1. Humanoid Robots
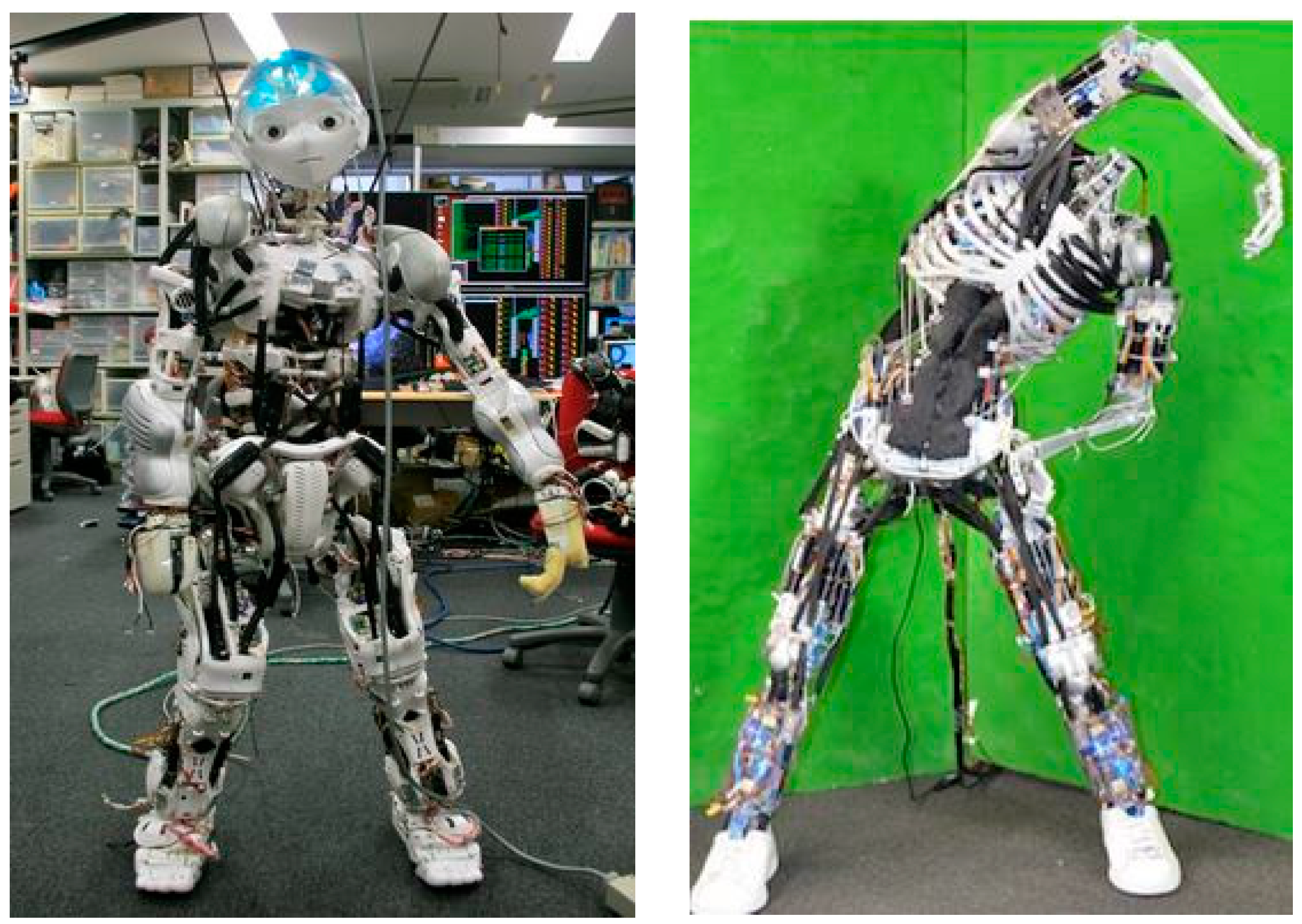
2.2. Anthropomimetic Robots
2.3. Biological Actuators
3. Human-Like Intelligence–Current Status and Trends
4. Human-Like Communication—Current Status and Trends
5. What Now?
5.1. Anthropomimetic Robot
5.2. Robomimetic Human
5.3. Robotics in Science Fiction
5.4. Ethical and Legal Issues
6. Conclusions
Funding
Conflicts of Interest
References
- Fukuda, T.; Michelini, R.; Potkonjak, V.; Tzafestas, S.; Valavanis, K.; Vukobratovic, M. How far away is artificial Man. IEEE Robot. Autom. Mag. 2001, 8, 66–73. [Google Scholar] [CrossRef]
- Zlotowski, J.; Proudfoot, D.; Yogeeswaran, K.; Bartneck, C. Anthropomorphism: Opportunities and challenges in human-robot interaction. Intl. J. Soc. Robot. 2015, 7, 347–360. [Google Scholar] [CrossRef]
- Ogawa, K.; Mori, M.; Hirai, A.; Tsuchiya, K.; Yuhara, H. Analysis of emotions for moving things. Jpn. J. Ergon. 1989, 25, 243–251. [Google Scholar] [CrossRef] [Green Version]
- Shibata, S.; Inooka, H. Psychological evaluations of robot motions. Int. J. Ind. Ergon. 1998, 21, 483–494. [Google Scholar] [CrossRef]
- Juricic, D.; Vukobratovic, M. Mathematical modeling of a bipedal walking system. ASME Publ. 1972, 72-WA/BHF-13. [Google Scholar]
- Vukobratovic, M. Legged Locomotion Robots and Anthropomorphic Mechanisms, Based on the Final Report of the Project: Active Exoskeleton for Paraplegics; Institute “M. Pupin”: Belgrade, Yugoslavia, 1974. [Google Scholar]
- Biped Humanoid Robot. Available online: http://www.takanishi.mech.waseda.ac.jp/top/research/wabian/previous_reserch/previous_research.htm (accessed on 2 April 2020).
- HONDA Robotics. Available online: https://global.honda/innovation/robotics/ASIMO.html (accessed on 2 April 2020).
- Hirai, K. Current and future perspective of Honda humanoid robots. In Robotics Research; Springer: London, UK, 1998; pp. 446–450. [Google Scholar]
- Nelson, G.; Saunders, A.; Playter, R. The PETMAN and atlas robots at boston dynamics. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: New York, NY, USA, 2018; pp. 169–186. [Google Scholar]
- Boston Dynamics-Atlas. Available online: https://www.bostondynamics.com/atlas (accessed on 4 April 2020).
- Holland, O.; Knight, R. The anthropomimetic principle. In Proceedings of the AISB’06 (Adaptation in Artificial and Biological Systems), London, UK, 4 April 2006. [Google Scholar]
- Diamond, A.; Knight, R.; Devereux, D.; Holland, O. Anthropomimetic robots: Concept, construction and modelling, invited paper. Int. J. Adv. Robot. Syst. 2012, 9, 209. [Google Scholar] [CrossRef]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-organization, embodiment, and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- The ECCEROBOT Project. Available online: eccerobot.org (accessed on 4 April 2020).
- Wittmeier, S.; Alessandro, C.; Bascarevic, N.; Dalamagkidis, K.; Diamond, A.; Jantsch, M.; Jovanovic, K.; Knight, R.; Marques, H.G.; Milosavljevic, P.; et al. Towards anthropomimetic robotics. Artif. Life Winter 2013, 19, 171–193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mizuuchi, I.; Nakanishi, Y.; Sodeyama, Y.; Namiki, Y.; Nishino, T.; Muramatsu, N.; Urata, J.; Hongo, K.; Yoshikai, T.; Inaba, M. An advanced musculoskeletal humanoid kojiro. In Proceedings of the 7th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2007), Pittsburgh, PA, USA, 29 November–1 December 2007. [Google Scholar] [CrossRef]
- Nakanishi, Y.; Ohta, S.; Shirai, T.; Asano, Y.; Kozuki, T.; Kakehashi, Y.; Mizoguchi, H.; Kurotobi, T.; Motegi, Y.; Sasabuchi, K.; et al. Design approach of biologically-inspired musculoskeletal humanoids. Int. J. Adv. Robot. Syst. 2013, 10, 216. [Google Scholar] [CrossRef]
- Herr, H.; Dennis, R.G. A swimming robot actuated by living muscle tissue. J. Neuro Eng. Rehabil. 2004, 1, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Cvetkovic, C.; Raman, R.; Chan, V.; Williams, B.J.; Tolish, M.; Bajaj, P.; Sakar, M.S.; Asada, H.H.; Saif, M.T.A.; Bashir, R. Three-dimensionally printed biological machines powered by skeletal muscle. Proc. Natl. Acad. Sci. USA 2014, 111, 10125–10130. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cultured Meat. Available online: http://culturedbeef.net/mark-post/ (accessed on 4 April 2020).
- Morimoto, Y.; Onoe, H.; Takeuchi, S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues. Sci. Robot. 2018, 3, eaat4440. [Google Scholar] [CrossRef] [Green Version]
- Russel, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Pfeifer, R.; Scheier, C. Understanding Intelligence; The MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; The MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Pfeifer, R.; Iida, F. Embodied artificial intelligence: Trends and challenges. In Embodied Artificial Intelligence (International Seminar, Dagstuhl Castle, Germany, 2003); Springer: New York, NY, USA, 2003; pp. 1–26. [Google Scholar]
- Kawato Dynamic Brain Project. Available online: http://www.cns.atr.jp/erato/ (accessed on 4 April 2020).
- Imamizu, H.; Miyauchi, S.; Tamada, T.; Takino, R.; Puets, B.; Yoshioka, T.; Kawato, M. Human cerebellar activity reflecting an acquired internal model of a novel tool. Nature 2000, 403, 192–195. [Google Scholar] [CrossRef] [PubMed]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]
- Schaal, S. Is imitation learning the route to humanoid robots? Trends Cogn. Sci. 1999, 3, 233–242. [Google Scholar] [CrossRef]
- Schroeder, M.R. Computer Speech: Recognition, Compression, Synthesis; Springer: New York, NY, USA, 2004. [Google Scholar] [CrossRef]
- Amazon Alexa. Available online: https://en.wikipedia.org/wiki/Amazon_Alexa (accessed on 16 May 2020).
- Siri. Available online: https://en.wikipedia.org/wiki/Siri (accessed on 16 May 2020).
- Cloud Text-to-Speech. Available online: https://cloud.google.com/text-to-speech (accessed on 16 May 2020).
- Potkonjak, V.; Tzafestas, S.; Radojicic, J.; Kostic, M. Modeling robot psycho-physical state and reactions—A new option in human-robot communication, part 1: Concept and background, part 2: Modeling and simulation. J. Intell. Robot. Syst. 2002, 35, 339–364. [Google Scholar] [CrossRef]
- Hiroshi Ishiguro Laboratories. Available online: http://www.geminoid.jp (accessed on 4 April 2020).
- Dolly (Sheep). Available online: https://en.wikipedia.org/wiki/Dolly_(sheep) (accessed on 4 April 2020).
- Campbell, K.H.; McWhir, J.; Ritchie, W.A.; Wilmut, I. Sheep cloned by nuclear transfer from a cultured cell line. Nature 1996, 380, 64–66. [Google Scholar] [CrossRef] [PubMed]
- Human Genome Project. Available online: https://en.wikipedia.org/wiki/Human_Genome_Project (accessed on 4 April 2020).
- International Human Genome Sequencing Consortium. Initial sequencing and analysis of the human genome. Nature 2001, 409, 860–921. [Google Scholar] [CrossRef] [Green Version]
- International Human Genome Sequencing Consortium. Finishing the euchromatic sequence of the human genome. Nature 2004, 431, 931–945. [Google Scholar] [CrossRef] [PubMed]
- Normile, D. Chinese Scientist Who Produced Genetically Altered Babies Sentenced to 3 Years in Jail. Science Magazine. 30 December 2019. Available online: https://www.sciencemag.org/news/2019/12/chinese-scientist-who-produced-genetically-altered-babies-sentenced-3-years-jail (accessed on 25 June 2020).
- Regalado, A. China’s Crispr Twins Might Have Had Their Brains Inadvertently Enhanced; Center for Genetics and Society: Berkeley, CA, USA; Available online: https://www.geneticsandsociety.org/article/chinas-crispr-twins-might-have-had-their-brains-inadvertently-enhanced (accessed on 25 June 2020).
- Pence, G.E. (Ed.) Flesh of My Flesh-The Ethics of Cloning Humans; Rowman & Littlefield: Lanham, MD, USA, 1998. [Google Scholar]
- Ayala, F.J. Cloning Humans? Biological, ethical, and social considerations. Proc. Natl. Acad. Sci. USA 2015, 112, 8879–8886. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Human Cloning. Available online: https://en.wikipedia.org/wiki/Human_cloning#Current_law (accessed on 14 May 2020).


© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Potkonjak, V. Is Artificial Man Still Far Away: Anthropomimetic Robots Versus Robomimetic Humans. Robotics 2020, 9, 57. https://doi.org/10.3390/robotics9030057
Potkonjak V. Is Artificial Man Still Far Away: Anthropomimetic Robots Versus Robomimetic Humans. Robotics. 2020; 9(3):57. https://doi.org/10.3390/robotics9030057
Chicago/Turabian StylePotkonjak, Veljko. 2020. "Is Artificial Man Still Far Away: Anthropomimetic Robots Versus Robomimetic Humans" Robotics 9, no. 3: 57. https://doi.org/10.3390/robotics9030057
APA StylePotkonjak, V. (2020). Is Artificial Man Still Far Away: Anthropomimetic Robots Versus Robomimetic Humans. Robotics, 9(3), 57. https://doi.org/10.3390/robotics9030057