
Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map

 ,
, 
 , and
, and
Abstract
:1. Introduction
2. Related Work
3. Study Area and Data Set
3.1. Study Area
3.2. Data Set
4. Global Path Planning
4.1. A-Star Path Planning Algorithm
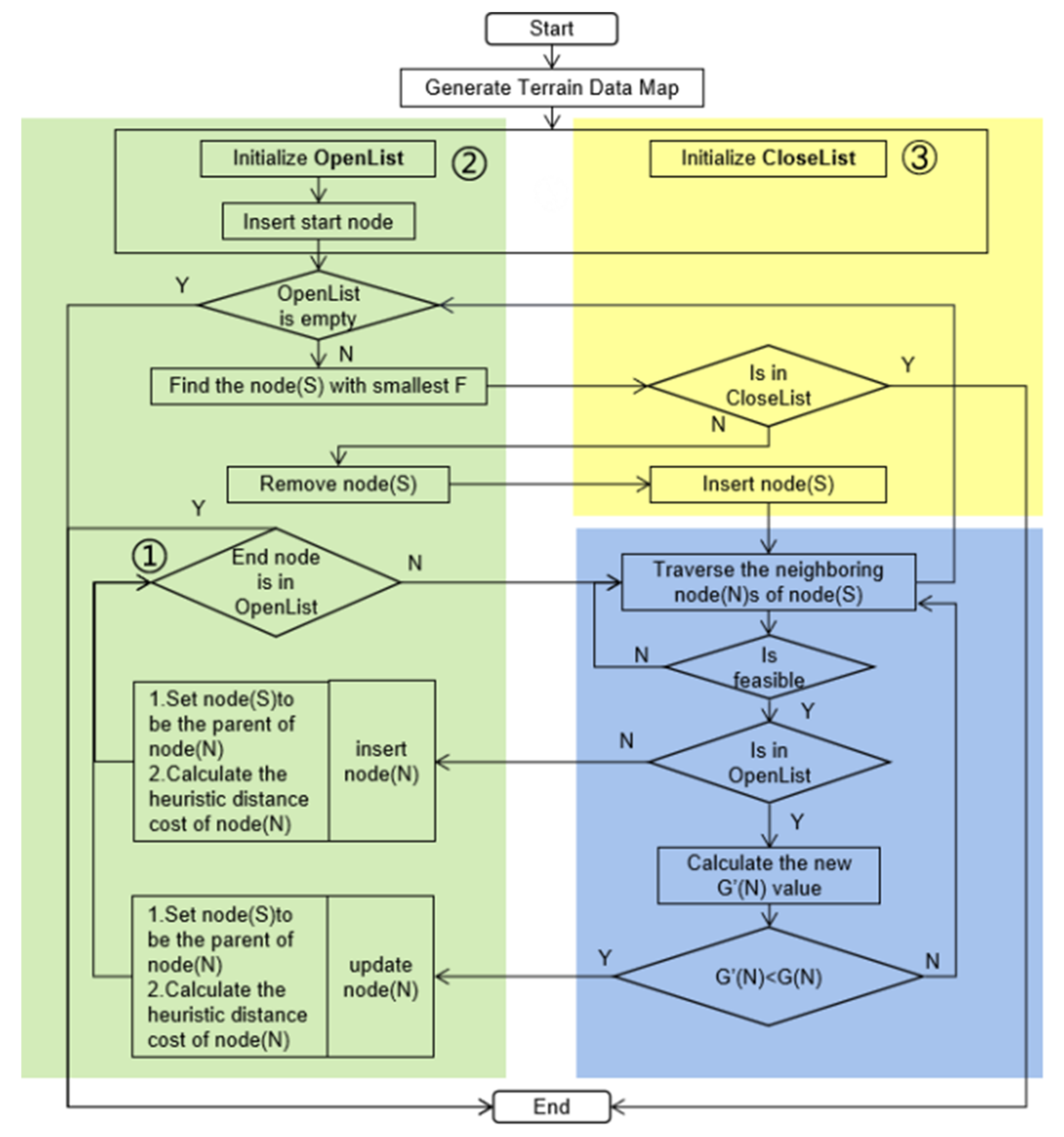
- Initialisation generates an OpenList, CloseList, and PathList, inserting the Start node into OpenList.
- When OpenList is not empty, the point traverses are determined in the OpenList with the smallest F value, removed from the OpenList, added to CloseList, and taken as the current point.
- Traverse the neighbouring feasible node corresponding to the current point to determine whether the neighbouring feasible node is in OpenList. If not, add it to the OpenList, add the current point to PathList, and calculate the heuristic distance cost. If it is in the OpenList, calculate its G value; continue traversing other nearby feasible nodes; otherwise, add the current point to PathList and update the heuristic distance cost of the node.
- The iteration moves to subsequent nodes until the current node becomes the end node.
4.2. Improved A-Star Path Planning Algorithm
| Algorithm 1: Improved A-Star Algorithm. |
| Input: start node SStart, end node Send, slope map Smap, feasible slope Fslope |
| Outout: PathList |
| 1 initialise: vector PathList |
| 2 path node P = FINDPATH (SStart, Send) |
| 3 while(P) |
| 4 add P into PathList and set P is the parent node of P |
| Function FINDPATH (SStart, Send) |
| 5 initialise: priority_queue OpenList, **CloseList |
| 6 add SStart into OpenList |
| 7 while OpenList is not empty do |
| 8 current node S is node with lowest F value in OpenList |
| 9 if S is in CloseList return S |
| 10 else delete S from OpenList and set S is in CloseList |
| 11 for each neighboring node N of S do |
| 12 if ISFEASILE(N)! = ture continue |
| 13 if N is in OpenList |
| 14 set the parent node of N is S and calculate F(N),G(N),H(N) and add N into OpenList |
| 15 else calculate new G’(N) |
| 16 if G’(N) < G(N) |
| 17 set the parent node of N is S and calculate F(N),G(N),H(N) and update N |
| 18 if H(S) < 100 //optimisation ① |
| 19 if Send is in OpenList |
| 20 return Send |
| Function ISFEASILE(N) |
| 21 if slope of N in Smap is greater than Fslope |
| 22 return ture |
| 23 else return false |
- In terms of search strategy optimisation, since the actual point retrieved will not be the end point at the beginning of the path planning, checking whether the endpoint is reached is not necessary. The intermediate detection retrieving the end point in the OpenList runs at the end of the path planning. If the end point is found in the OpenList, the execution of path planning ends. When the distance between the leading and end point is less than 100, the intermediate detection is started. It will reduce the retrieval time. Additionally, the threshold for the distance is not a fixed value. Additionally, 100 is an appropriate threshold for distances, obtained through experiments. This improvement is illustrated in ① of Figure 4.
- In terms of data structure optimisation, the improved A-Star algorithm uses the hybrid data structure of minimum heap and 2D array to reduce the time cost of data processing. OpenList has frequent insert, delete, update, and retrieve operations, especially the process of finding the node with the least heuristic value in OpenList is time-consuming; therefore, the priority queue (minimum heap) is used as the container of OpenList, and the time complexity of finding the minimum heuristic value node and deleting process is reduced from O(n) to O(1). Although the time complexity is increased from O(1) to O(log(n)) in the process of constructing the binary tree, the overall time complexity is reduced. This improvement is located in ② of Figure 4. CloseList has frequent insert and retrieve operations, which have time complexities of O(1) and O(n), respectively. There is no delete operation in CloseList, so the retrieval time will continue to increase as the number of nodes increases. The 2D state array stores the retrieval state of each point in the map. Thus, the time complexity in the CloseList retrieval process is reduced from the original O(n) to O(1), which greatly improves retrieval speed. This improvement is located in ③ of Figure 4.
5. Experiment and Results
5.1. Slope Threshold for Off-Road Vehicles
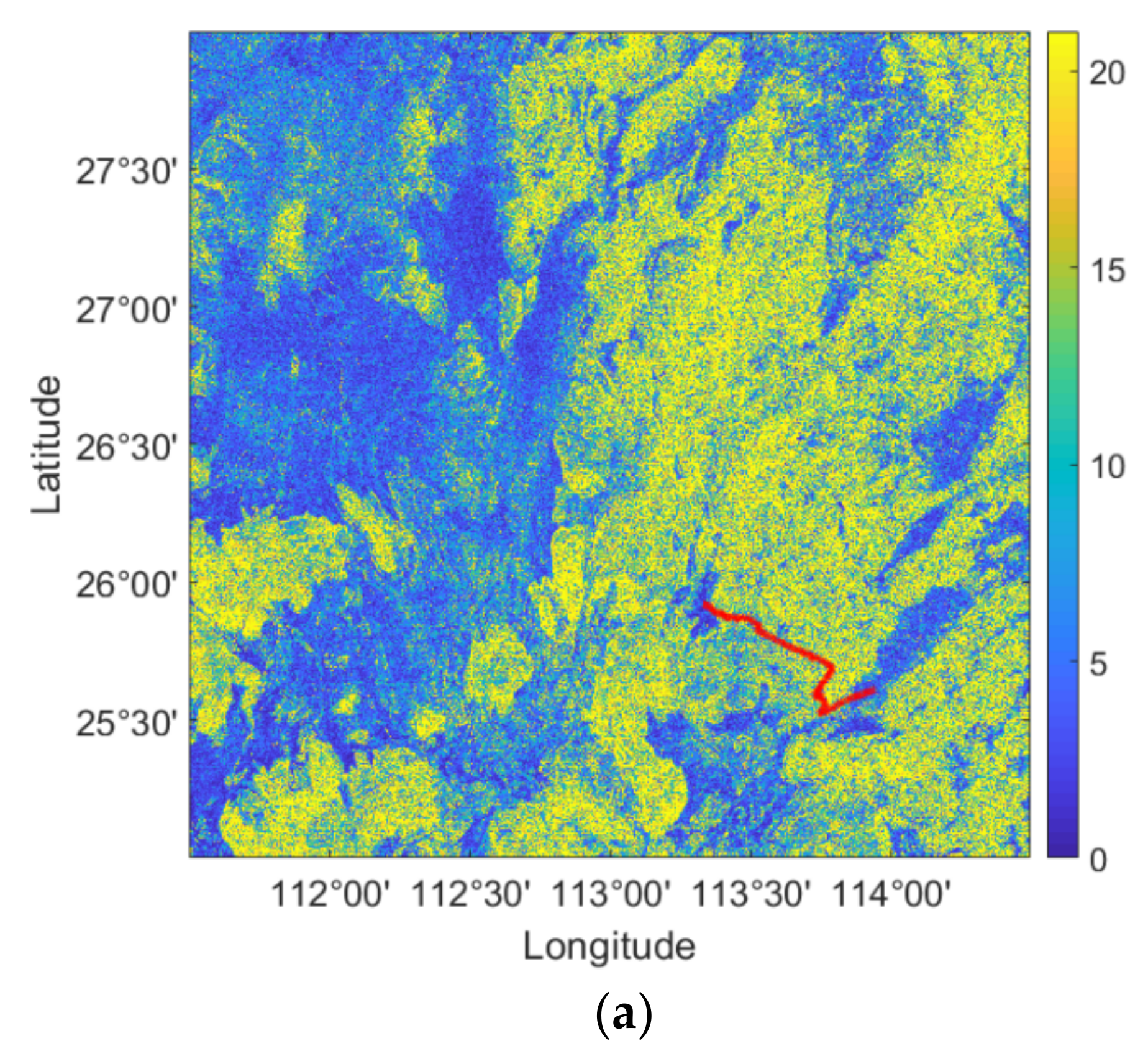
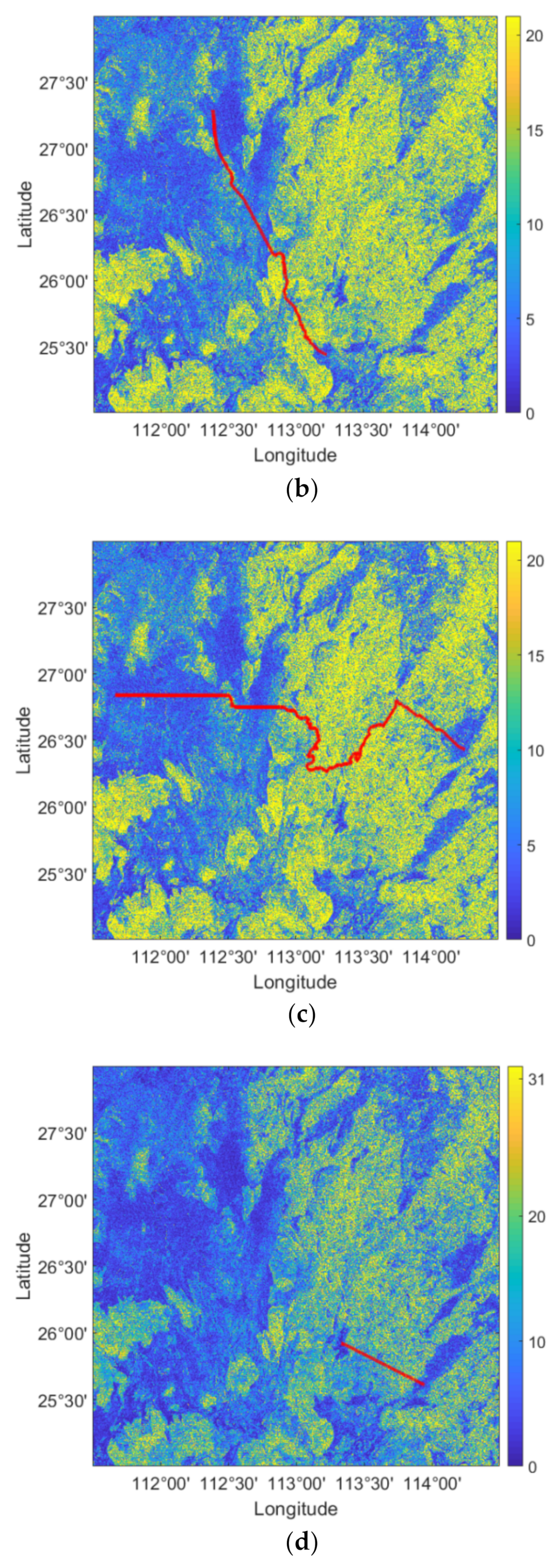
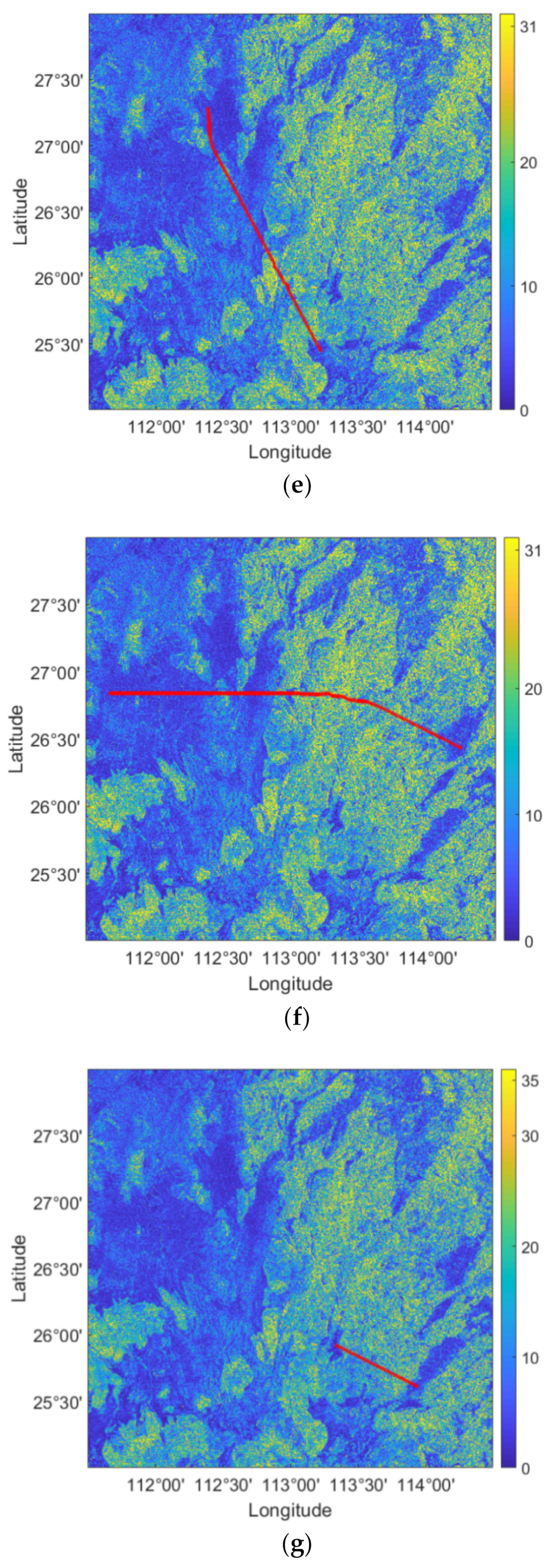
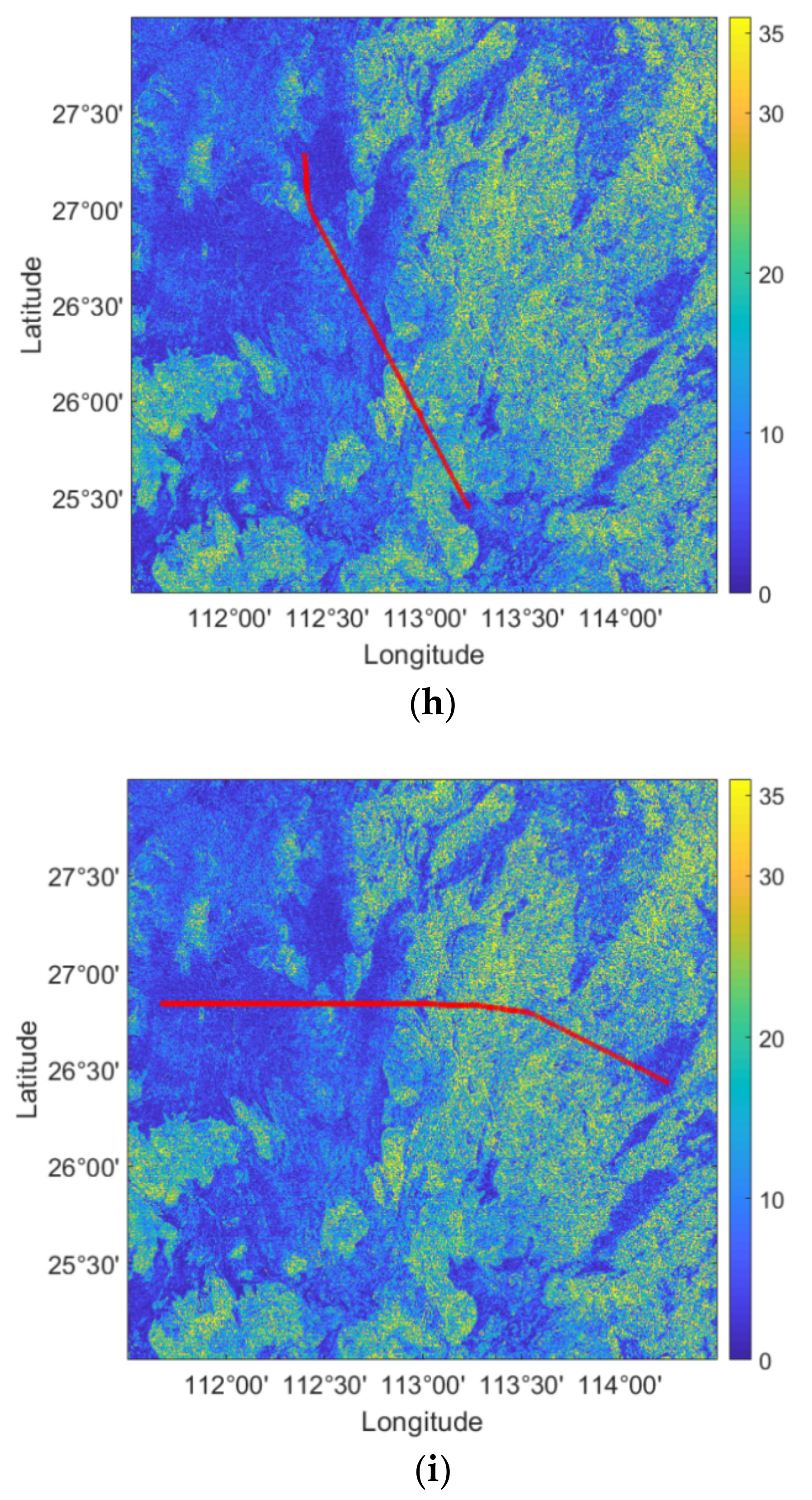
5.2. Improved A-Star Algorithm for Path Planning of Different Off-Road Vehicles
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kundra, H.; Sood, M. Cross-country path finding using hybrid approach of PSO and BBO. Int. J. Comput. Appl. Technol. 2010, 7, 15–19. [Google Scholar] [CrossRef]
- Liang, H.; Bai, H.; Sun, R.; Sun, R.; Li, C. Three-dimensional path planning based on DEM. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 5980–5987. [Google Scholar]
- Korkmaz, M.; Durdu, A. Comparison of optimal path planning algorithms. In Proceedings of the 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 1 February 2018; pp. 255–258. [Google Scholar]
- Dalton, A.J. Autonomous Vehicle Path Planning with Remote Sensing Data. Master Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2008. [Google Scholar]
- Wang, B.; Li, S.; Guo, J.; Chen, Q. Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm. Neurocomputing 2018, 282, 42–51. [Google Scholar] [CrossRef]
- Zhou, X.; Xie, Q.; Guo, M.; Zhao, J.; Wang, J. Accurate and Efficient Indoor Pathfinding Based on Building Information Modeling Data. IEEE Trans. Ind. Inform. 2020, 16, 7459–7468. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, S.; Sima, B.; Wen, B.; Peng, S.; Jia, Y. A precise visual localisation method for the Chinese Chang’e-4 Yutu-2 rover. Photogramm. Rec. 2020, 35, 10–39. [Google Scholar] [CrossRef]
- Panov, A.I.; Yakovlev, K.S.; Suvorov, R. Grid path planning with deep reinforcement learning: Preliminary results. Procedia Comput. Sci. 2018, 123, 347–353. [Google Scholar] [CrossRef]
- Bai, J.H.; Oh, Y.J. Global Path Planning of Lunar Rover Under Static and Dynamic Constraints. Int. J. Aeronaut. Space Sci. 2020, 21, 1105–1113. [Google Scholar] [CrossRef]
- Liu, Q.; Zhao, L.; Tan, Z.; Chen, W. Global path planning for autonomous vehicles in off-road environment via an A-star algorithm. Int. J. Veh. Auton. Syst. 2017, 13, 330–339. [Google Scholar] [CrossRef]
- Noreen, I.; Khan, A.; Habib, Z. Optimal path planning using RRT * based approaches: A survey and future directions. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Castillo, O.; Trujillo, L.; Melin, P. Multiple objective genetic algorithms for path-planning optimization in autonomous mobile robots. Soft Comput. 2007, 11, 269–279. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A * algorithm for practical unmanned surface vehicle path planning. Appl. Ocean Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path planning with modified a star algorithm for a mobile robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, L.L.; Lin, H.C.; Ma, Z.; Zhao, J. Development of path planning approach based on improved A-star algorithm in AGV system. In Proceedings of the International Conference on Internet of Things as a Service, Taichung, Taiwan, China, 20–22 September 2017; pp. 276–279. [Google Scholar]
- Shang, E.; Dai, B.; Nie, Y.; Zhu, Q.; Xiao, L.; Zhao, D. A Guide-line and Key-point based A-star Path Planning Algorithm For Autonomous Land Vehicles. In Proceedings of the 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 24 December 2020; pp. 1–7. [Google Scholar]
- Wang, C.; Wang, L.; Qin, J. Path planning of automated guided vehicles based on improved A-Star algorithm. In Proceedings of the International Conference on Information and Automation (ICIA), Lijiang, China, –10 August 2015; pp. 2071–2076. [Google Scholar]
- Zhao, X.; Wang, Z.; Huang, C.K.; Zhao, Y.W. Mobile Robot Path Planning Based on an Improved A * Algorithm. Robot 2018, 40, 903–910. [Google Scholar]
- Zambrano-Martinez, J.L.; Calafate, C.T.; Soler, D.; Lemus-Zúñiga, L.G.; Cano, J.C.; Manzoni, P.; Gayraud, T. A centralized route-management solution for autonomous vehicles in urban areas. Electronics 2019, 8, 722. [Google Scholar] [CrossRef] [Green Version]
- Xu, P.F.; Ding, Y.X.; Luo, J.C. Complete Coverage Path Planning of an Unmanned Surface Vehicle Based on a Complete Coverage Neural Network Algorithm. J. Mar. Sci. Eng. 2021, 9, 1163. [Google Scholar] [CrossRef]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The Algorithm of Determining an Anti-Collision Manoeuvre Trajectory Based on the Interpolation of Ship’s State Vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhou, J.; Zheng, G.; Yun, L. HAS: Hierarchical A-Star Algorithm for Big Map Navigation in Special Areas. In Proceedings of the International Conference on Digital Home (ICDH), Guangzhou, China, 28–30 November 2014. [Google Scholar]
- Al Zoubi, O.; Awad, M. Dynamic Area Search with Shared Memory: A Meta-Framework to Improve Pathfinding Algorithms. In Proceedings of the International Conference on Innovations in Information Technology (IIT), Al Ain, United Arab Emirates, 18–19 November 2018; pp. 81–87. [Google Scholar]
- Kwa, J.B. BS∗: An admissible bidirectional staged heuristic search algorithm. Artif. Intell. 1989, 38, 95–109. [Google Scholar] [CrossRef]
- Gao, Y.; Ehsani, M. Parametric design of the traction motor and energy storage for series hybrid off-road and military vehicles. IEEE Trans. Power Electron. 2006, 21, 749–755. [Google Scholar]
- Zhang, Y.; Qiu, M.; Liu, X.; Li, J.; Song, H.; Zhai, Y.; Hu, H. Research on Characteristics of Tracked Vehicle Steering on Slope. Math. Probl. Eng. 2021, 2021, 3592902. [Google Scholar] [CrossRef]
- Wakabayashi, S.; Sato, H.; Nishida, S.I. Design and mobility evaluation of tracked lunar vehicle. J. Terramechanics 2009, 46, 105–114. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| level | Vehicle Type | Feasible Slope (Degree) |
|---|---|---|
| 1 | Tracked vehicle | 35 |
| 2 | Wheeled vehicle | 31 |
| 3 | Tracked lunar rover | 20 |
| Path | Start Point (px, px) | End Point (px, px) | Distance (km) | Characteristics |
|---|---|---|---|---|
| Short | (8031, 9183) | (10,709, 10,551) | 60.144 | Mountainous |
| Median | (3881, 3134) | (7580, 11,302) | 179.33 | Mostly flat, partly mountainous |
| Long | (741, 5121) | (12,053, 6931) | 229.118 | Partially flat, mostly mountainous |
| Vehicle Type | Distance Set | Conventional A-Star | Improved A-Star | Bidirectional Search | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Retrieve Length (px) | Path Length (px) | Process Time (s) | Retrieve Length (px) | Path Length (px) | Process Time (s) | Retrieve Length (px) | Path Length (px) | Process Time (s) | ||
| Tracked vehicle | Short | 2697 | 2691 | 1.573 | 2697 | 2691 | 0.801 | 2685 | 2679 | 1.022 |
| Medium | 8293 | 8267 | 18.992 | 8293 | 8267 | 5.63 | 8273 | 8239 | 12.556 | |
| Long | 11,547 | 11,444 | 39.526 | 11,547 | 11,444 | 8.512 | 11,406 | 11,323 | 23.716 | |
| Wheeled vehicle | Short | 2789 | 2737 | 1.489 | 2789 | 2737 | 0.745 | 2751 | 2721 | 1.156 |
| Medium | 8562 | 8343 | 18.394 | 8562 | 8343 | 6.553 | 8413 | 8298 | 12.667 | |
| Long | 12,942 | 11,623 | 45.267 | 12,942 | 11,623 | 9.244 | 12,325 | 11,507 | 29.135 | |
| Tracked lunar rover | Short | 113,315 | 5432 | 2502.35 | 113,315 | 5432 | 24.575 | 110,032 | 5432 | 1626.527 |
| Medium | 24,419 | 10,046 | 99.333 | 24,419 | 10,046 | 14.487 | 23,206 | 9993 | 62.58 | |
| Long | 567,091 | 21,453 | 182,753.8 | 567,091 | 21,453 | 331.468 | 554,127 | 21,313 | 113,307.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Z.; Sun, P.; Tong, X.; Pan, H.; Zhou, R.; Zhang, Y.; Han, Y.; Wang, J.; Yang, S.; Xu, L. Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map. ISPRS Int. J. Geo-Inf. 2021, 10, 785. https://doi.org/10.3390/ijgi10110785
Hong Z, Sun P, Tong X, Pan H, Zhou R, Zhang Y, Han Y, Wang J, Yang S, Xu L. Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map. ISPRS International Journal of Geo-Information. 2021; 10(11):785. https://doi.org/10.3390/ijgi10110785
Chicago/Turabian StyleHong, Zhonghua, Pengfei Sun, Xiaohua Tong, Haiyan Pan, Ruyan Zhou, Yun Zhang, Yanling Han, Jing Wang, Shuhu Yang, and Lijun Xu. 2021. "Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map" ISPRS International Journal of Geo-Information 10, no. 11: 785. https://doi.org/10.3390/ijgi10110785
APA StyleHong, Z., Sun, P., Tong, X., Pan, H., Zhou, R., Zhang, Y., Han, Y., Wang, J., Yang, S., & Xu, L. (2021). Improved A-Star Algorithm for Long-Distance Off-Road Path Planning Using Terrain Data Map. ISPRS International Journal of Geo-Information, 10(11), 785. https://doi.org/10.3390/ijgi10110785