
PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence

Abstract
:1. Introduction
- We propose a technical route based on swarm intelligence to solve the problem of trajectory segmentation and compression, and few similar studies are currently available. The heuristic search and optimization of the trajectory segmentation solution based on population behavior can quickly and accurately find the global optimal segmentation feature point set without user intervention, which lays the foundation for the application of intelligent optimization algorithm in moving target trajectory data processing.
- The proposed algorithm based on PSO has the advantage of global segmentation and compression and does not need to adjust the threshold parameters repeatedly. Compared with the local forward segmentation and compression methods, our algorithm is more accurate on the feature points selection, and the compressed trajectory has better similarity with the original trajectory.
- We propose a new NARJ particle update strategy, which can not only make the local optimal segmentation solution evolve into a better solution efficiently, but can also make the bad solution update quickly to try new segmentation possibilities. Compared with the classical particle swarm optimization method, the generation efficiency of the optimal solution is improved.
- We define the trajectory profile fitting degree as the similarity evaluation index between the compressed trajectory and the original trajectory and apply it to segmentation solution optimization. This index has no dimension, which effectively solves the difficulty in setting the parameters, such as distance threshold and direction change threshold. Therefore, it improves the applicability of the algorithm.
2. Evaluation Index of Segmentation Accuracy
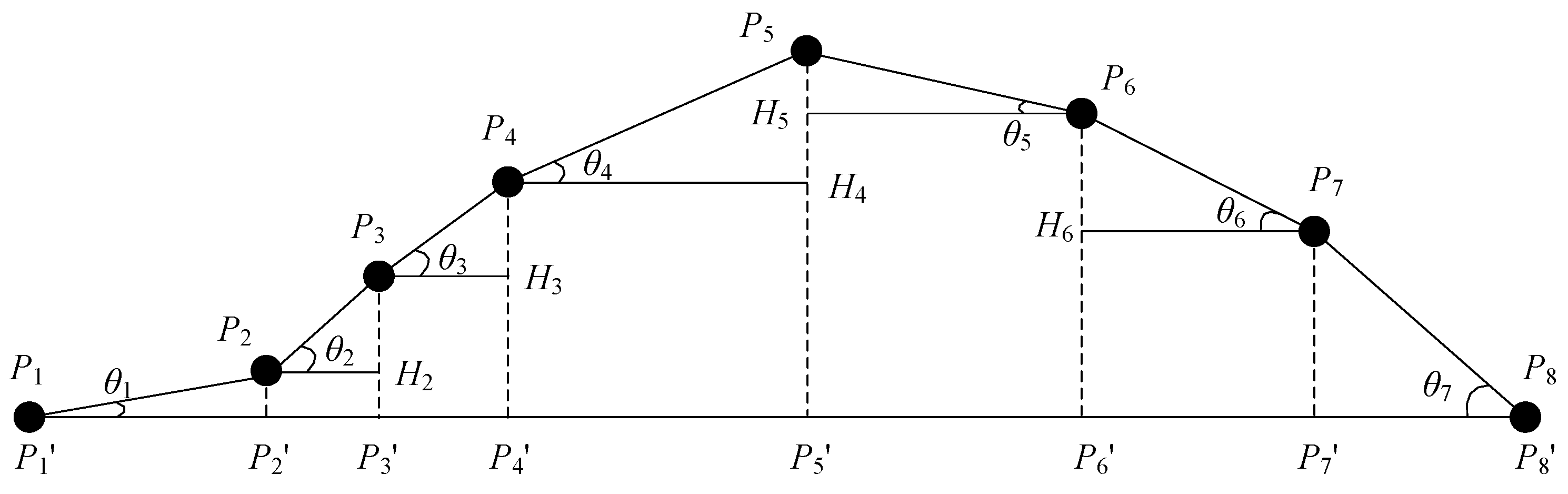
2.1. Related Definitions
2.2. Profile Fitting Degree
3. The PSOTSC Algorithm
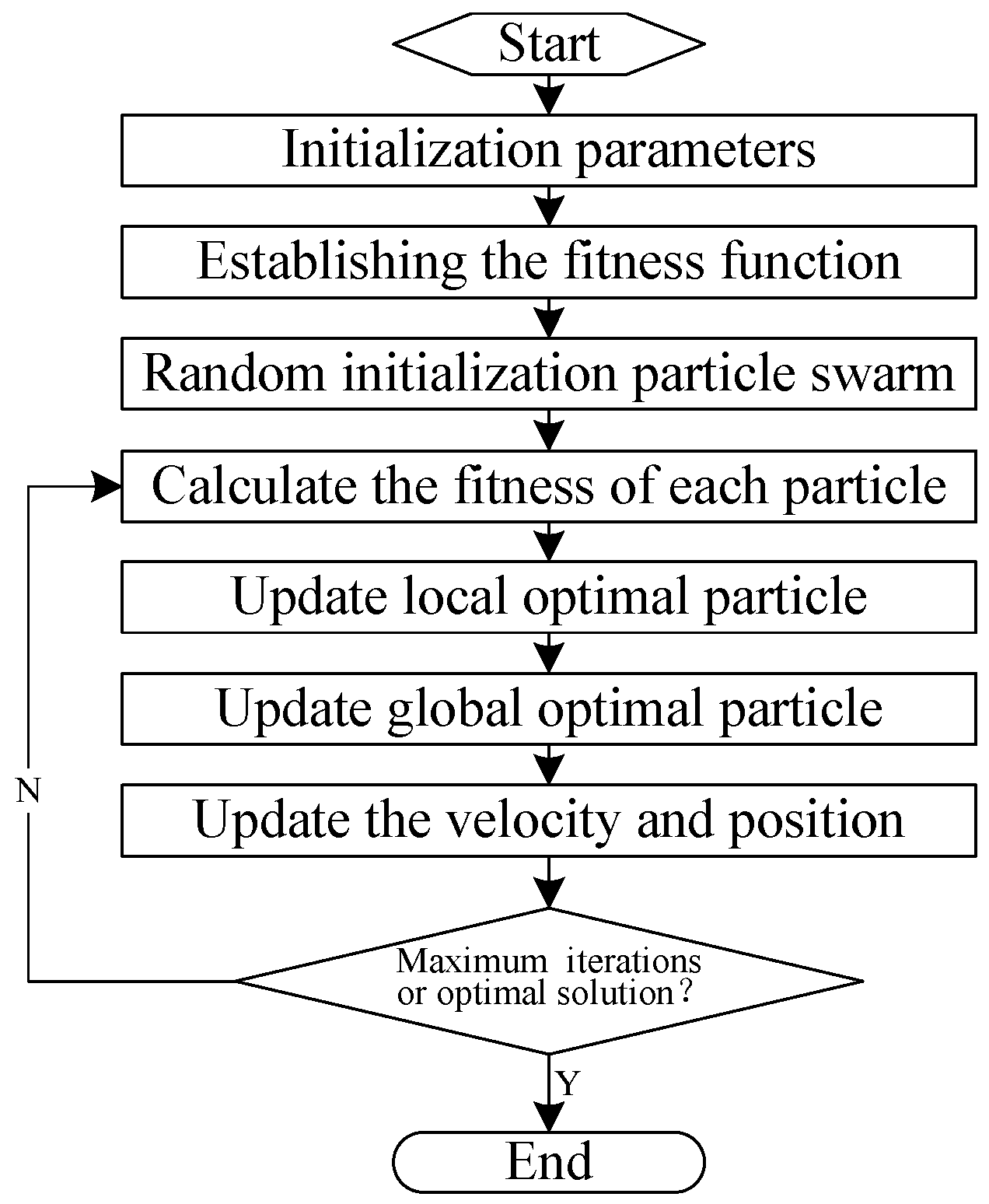
3.1. Overall Framework
| Algorithm 1 PSOTSC |
| Input: A set of trajectories |
| Output: A set of compressed trajectories |
| A compression ratio of and a segmentation accuracy of |
| 01: for each do |
| 02: Number of segments ; |
| 03: while do |
| 04: Search optimal segmentation solution ; |
| 05: Calculate the compression ratio and segmentation accuracy of ; |
| 06: Satisfaction judgment ; |
| 07: if |
| 08: break; |
| 09: Increase number of segments ; |
| 10: end while |
| 11: end for |
| 12: Generate a set of compressed trajectories |
| 13: Calculate and of |
3.2. Particle Swarm Segmentation Optimization
| Algorithm 2 |
| Input: Trajectory points ordered by time |
| A set of parameters of PSO |
| A threshold of trajectory profile fitting |
| A number of compressed trajectory segments |
| Output: Compressed trajectory points ordered by time |
| 01: Initial particle swarm and velocity , |
| 02: while and do |
| 03: for each do |
| 04: Calculate fitness ; |
| 05: end for |
| 06: Find Current best particle and best fitness with maximum ; |
| 07: Update global best particle and best fitness ; |
| 08: for each do |
| 09: Calculate velocity using ; |
| 10: Update particle based on strategy ; |
| 11: end for |
| 12: end while |
| 13: Construct compressed trajectory ; |
3.3. NARJ Particle Update Strategy
| Algorithm 3 |
| Input: A particle and its fitness |
| A neighborhood adjustment span |
| A number of adjusted feature points |
| Output: An evolved particle |
| 01: Select feature points; |
| 02: Evaluate the quality of particle with its fitness ; |
| 03: if is high-quality then |
| /* Neighborhood Adjustment*/ |
| 04: Change the feature points in range; |
| 05: else |
| /* Random Jump */ |
| 06: Change the feature points randomly; |
| 07: end if |
| 08: Set the value of the new points to 1 and the old points to 0; |
| 09: Replace the old particle with the evolved one ; |
3.4. Satisfaction Judgment
4. Results and Discussion
4.1. Experimental Setting
4.2. Results of Segmentation Accuracy
4.2.1. Real Trajectory Data
4.2.2. Maneuvering Target Simulation Data
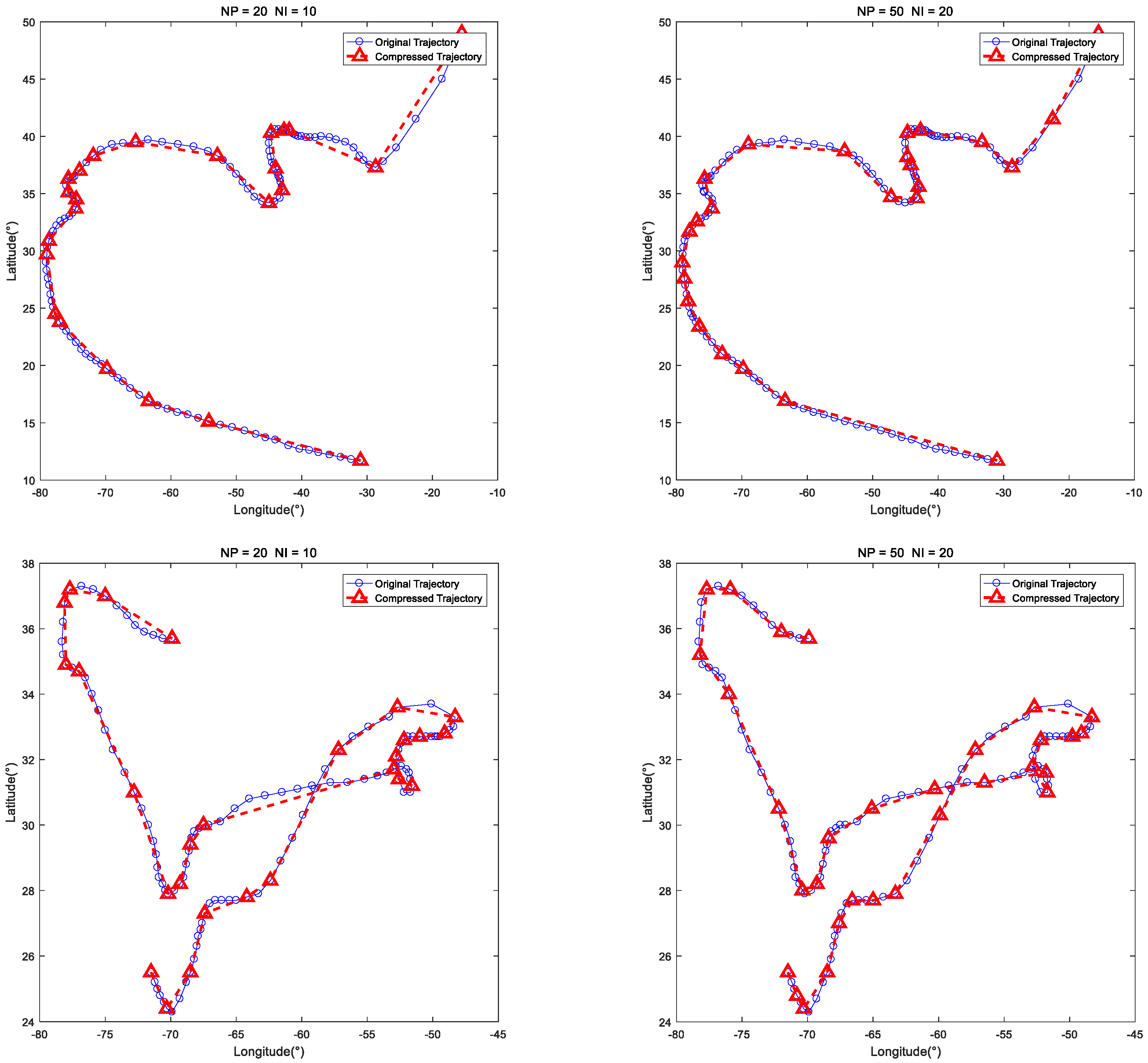
4.3. Results of Algorithm Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kontopoulos, I.; Makris, A.; Tserpes, K. A Deep Learning Streaming Methodology for Trajectory Classification. ISPRS Int. J. Geo-Inf. 2021, 10, 250. [Google Scholar] [CrossRef]
- Hachem, F.; Damiani, M.L. Periodic stops discovery through density-based trajectory segmentation. In Proceedings of the SIGSPATIAL’18, Seattle, WA, USA, 6 November 2018. [Google Scholar]
- Bin, C.; Gu, T.; Sun, Y.; Chang, L. A personalized POI route recommendation system based on heterogeneous tourism data and sequential pattern mining. Multimed. Tools Appl. 2019, 78, 35135–35156. [Google Scholar] [CrossRef]
- Xu, J.Q.; Guting, R.H.; Gao, Y.J. Continuous k nearest neighbor queries over large multi-attribute trajectories: A systematic approach. Geoinformatica 2018, 22, 723–766. [Google Scholar] [CrossRef]
- Wang, Y.; Qin, K.; Chen, Y.; Zhao, P. Detecting anomalous trajectories and behavior patterns using hierarchical clustering from taxi GPS data. Int. J. Geo-Inf. 2018, 7, 25. [Google Scholar] [CrossRef] [Green Version]
- Yu, Q.; Luo, Y.; Chen, C.; Chen, S. Trajectory similarity clustering based on multi-feature distance measurement. Appl. Intell. 2019, 49, 2315–2338. [Google Scholar] [CrossRef]
- Cai, L.; Jiang, F.; Zhou, W.; Li, K. Design and Application of an Attractiveness Index for Urban Hotspots Based on GPS Trajectory Data. IEEE Access 2018, 6, 55976–55985. [Google Scholar] [CrossRef]
- Makris, A.; Kontopoulos, I.; Alimisis, P.; Tserpes, K. A Comparison of Trajectory Compression Algorithms Over AIS Data. IEEE Access 2021, 9, 92516–92530. [Google Scholar] [CrossRef]
- Makris, A.; da Silva, C.L.; Bogorny, V.; Alvares, L.O.; Macedo, J.A.; Tserpes, K. Evaluating the effect of compressing algorithms for trajectory similarity and classification problems. GeoInformatica 2021, 25, 679–711. [Google Scholar] [CrossRef]
- Leichsenring, Y.E.; Baldo, F. An evaluation of compression algorithms applied to moving object trajectories. Int. J. Geogr. Inf. Sci. 2019, 34, 539–558. [Google Scholar] [CrossRef]
- Sun, P.H.; Xia, S.X.; Yuan, G.; Li, D.X. An overview of moving object trajectory compression algorithms. Math. Probl. Eng. 2016, 3, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Li, H.; Yang, Z.; Wu, K.; Liu, Y.; Liu, R.W. Adaptive Douglas-Peucker Algorithm with Automatic Thresholding for AIS-Based Vessel Trajectory Compression. IEEE Access 2019, 7, 150677–150692. [Google Scholar] [CrossRef]
- Zhao, L.B.; Shi, G.Y. A method for simplifying ship trajectory based on improved Douglas-Peucker algorithm. Ocean Eng. 2018, 166, 37–46. [Google Scholar] [CrossRef]
- Zhao, L.B.; Shi, G.Y. A trajectory clustering method based on Douglas-Peucker compression and density for marine traffic pattern recognition. Ocean. Eng. 2019, 172, 456–467. [Google Scholar] [CrossRef]
- Huang, Y.; Li, Y.; Zhang, Z.; Liu, R.W. GPU-Accelerated Compression and Visualization of Large-Scale Vessel Trajectories in Maritime IoT Industries. IEEE Internet Things J. 2020, 7, 10794–10812. [Google Scholar] [CrossRef]
- Mou, J.M.; Chen, P.F.; He, Y.X.; Zhang, X.J.; Zhu, J.F.; Rong, H. Fast self-tuning spectral clustering algorithm for AIS ship trajectory. J. Harbin Eng. Univ. 2018, 39, 428–431. [Google Scholar]
- Zhu, J.; Huang, C.; Yang, M.; Fung, G.P.C. Context-based prediction for road traffic state using trajectory pattern mining and recurrent convolutional neural networks. Inf. Sci. 2018, 473, 190–201. [Google Scholar] [CrossRef]
- Zhao, Y.; Shang, S.; Wang, Y.; Zheng, B.; Nguyen, Q.V.H.; Zheng, K. REST: A reference-based framework for spatio-temporal trajectory compression. In Proceedings of the 24th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, London, UK, 19–23 August 2018; pp. 2797–2806. [Google Scholar]
- Roniel, S.D.S.; Azzedine, B.; Antonio, A.F.L. Vehicle Trajectory Similarity: Models, Methods, and Applications. ACM Comput. Surv. 2020, 53, 1–32. [Google Scholar]
- Zheng, K.; Zhao, Y.; Lian, D.; Zheng, B.; Liu, G.; Zhou, X. Reference-Based Framework for Spatio-Temporal Trajectory Compression and Query Processing. IEEE Trans. Knowl. Data Eng. 2020, 32, 2227–2240. [Google Scholar] [CrossRef]
- Han, Y.; Sun, W.; Zheng, B. COMPRESS: A comprehensive framework of trajectory compression in road networks. ACM Trans. Database Syst. 2017, 42, 11. [Google Scholar] [CrossRef]
- Jin, J.L.; Zhou, W.J.; Bai, C. Trajectory segmentation algorithm based on behavior pattern. J. Signal Process. 2020, 36, 2074–2084. [Google Scholar]
- Cai, G.; Lee, K.; Lee, I. Mining Semantic Trajectory Patterns from Geo-Tagged Data. J. Comput. Sci. Technol. 2018, 33, 849–862. [Google Scholar] [CrossRef]
- Cai, G.; Lee, K.; Lee, I. Mining Mobility Patterns from Geotagged Photos Through Semantic Trajectory Clustering. Cybern. Syst. 2018, 49, 234–256. [Google Scholar] [CrossRef]
- Wei, Z.; Xie, X.; Zhang, X. AIS trajectory simplification algorithm considering ship behaviours. Ocean. Eng. 2020, 216, 108086. [Google Scholar] [CrossRef]
- Giannis, F.; Kostas, P.; Alexander, A. Optimizing Vessel Trajectory Compression. In Proceedings of the 21st IEEE International Conference on Mobile Data Management, Versailles, France, 3 July 2020; pp. 2429–2436. [Google Scholar]
- Liang, M.; Liu, R.W.; Li, S.; Xiao, Z.; Liu, X.; Lu, F. An unsupervised learning method with convolutional auto-encoder for vessel trajectory similarity computation. Ocean. Eng. 2021, 225, 108803. [Google Scholar] [CrossRef]
- Etemad, M.; Soares, A.; Etemad, E.; Rose, J.; Torgo, L.; Matwin, S. SWS: An unsupervised trajectory segmentation algorithm based on change detection with interpolation kernels. GeoInformatica 2020, 25, 269–289. [Google Scholar] [CrossRef]
- Junior, A.S.; Times, V.C.; Renso, C.; Matwin, S.; Cabral, L.A. A Semi-Supervised Approach for the Semantic Segmentation of Trajectories. In Proceedings of the 19th IEEE International Conference on Mobile Data Management, Aalborg, Denmark, 26–28 June 2018; pp. 145–154. [Google Scholar]
- Fazzinga, B.; Flesca, S.; Furfaro, F.; Masciari, E. RFID-data compression for supporting aggregate queries. ACM Trans. Database Syst. 2013, 38, 1–45. [Google Scholar] [CrossRef]
- Fazzinga, B.; Flesca, S.; Furfaro, F.; Masciari, E. Efficient and effective RFID data warehousing. In Proceedings of the 2009 International Database Engineering & Applications Symposium, Cetraro, Italy, 16–18 September 2009; pp. 251–258. [Google Scholar]
- Hershberger, J.E.; Snoeyink, J. Speeding up the douglas-peucker line-simplification algorithm. In International Symposium on Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 1992; pp. 134–143. [Google Scholar]
- Meratnia, N.; Rolf, A. Spatiotemporal compression techniques for moving point objects. In Proceedings of the Advances in Database Technology (EDBT 2004); Springer: Berlin/Heidelberg, Germany, 2004; pp. 765–782. [Google Scholar]
- Muckell, J.; Olsen, P.W.; Hwang, J.H.; Lawson, C.T.; Ravi, S.S. Compression of trajectory data: A comprehensive evaluation and new approach. Geoinformatica 2014, 18, 435–460. [Google Scholar] [CrossRef]
- Muckell, J.; Hwang, J.H.; Lawson, C.T.; Ravi, S.S. Algorithms for compressing GPS trajectory data: An empirical evaluation. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; pp. 402–405. [Google Scholar]
- Bellman, R.E. On the approximation of curves by line segments using dynamic programming. CACM 1961, 4, 284. [Google Scholar] [CrossRef]
- Potamias, M.; Patroumpas, K.; Sellis, T. Sampling trajectory streams with spatiotemporal criteria. In Proceedings of the 18th SIGSPATIAL International Conference on Scientific and Statistical Database Management (SSDBM’06), Vienna, Austria, 3–5 July 2006; pp. 275–284. [Google Scholar]
- Liu, J.; Zhao, K.; Sommer, P.; Shang, S.; Kusy, B.; Jurdak, R. Bounded quadrant system: Error-bounded trajectory compression on the go. In Proceedings of the 31st IEEE International Conference on Data Engineering, Seoul, Korea, 13–17 April 2015; pp. 987–998. [Google Scholar]
- Chen, C.; Ding, Y.; Xie, X.; Zhang, S.; Wang, Z.; Feng, L. TrajCompressor: An Online Map-matching-based Trajectory Compression Framework Leveraging Vehicle Heading Direction and Change. IEEE Trans. Intell. Syst. 2019, 21, 1–15. [Google Scholar] [CrossRef]
- Lee, J.G.; Han, J.; Whang, K.Y. Trajectory clustering: A partition-and-group framework. In Proceedings of the 2007 ACM SIGMOD International Conference on Management of Data, Beijing, China, 12–14 June 2007; pp. 593–604. [Google Scholar]
- Lee, J.G.; Han, J.; Li, X. Trajectory outlier detection: A partition-and-detect framework. In Proceedings of the 24th International Conference on Data Engineering, Cancun, Mexico, 7–12 April 2008; pp. 140–149. [Google Scholar]
- Lee, J.G.; Han, J.; Li, X.; Gonzalez, H. TraClass: Trajectory classification using hierarchical region-based and trajectory-based clustering. Proc. VLDB Endow. 2008, 1, 1081–1094. [Google Scholar] [CrossRef]
- Lee, J.G.; Han, J.; Li, X. A unifying framework of mining trajectory patterns of various temporal tightness. IEEE Trans. Knowl. Data Eng. 2015, 27, 1478–1490. [Google Scholar] [CrossRef]
- Yuan, H.; Qian, Y.; Yang, R. Research on GPS- trajectory-based personalization POI and path mining. Syst. Eng. Theory Pract. 2015, 35, 1276–1282. [Google Scholar]
- Liu, X.; Dong, L.; Shang, C.; Wei, X. An improved high-density sub trajectory clustering algorithm. IEEE Access 2020, 8, 46041–46054. [Google Scholar] [CrossRef]
- Zhang, H.F.; Pi, D.C.; Dong, Y.L. iBTC: A trajectory clustering algorithm based on Isolation Forest. Comput. Sci. 2019, 46, 251–259. [Google Scholar]
- Guan, Y.; Xia, S.X.; Zhang, L.; Zhou, Y. Trajectory clustering algorithm based on structural similarity. J. Commun. 2011, 32, 103–110. [Google Scholar]
- Yuan, G.; Xia, S.; Zhang, L.; Zhou, Y.; Ji, C. An efficient trajectory-clustering algorithm based on an index tree. Trans. Inst. Meas. Control. 2011, 34, 850–861. [Google Scholar] [CrossRef]
- Cheng, L.; Raymond, C.W.W.; Jagadish, H.V. Direction-preserving trajectory simplification. Proc. VLDB Endow. 2013, 6, 949–960. [Google Scholar]
- Kennedy, J.; Eberhart, R.; Shi, Y.H. Swarm Intelligence; Morgan Kaufmann Publishers: San Mateo, CA, USA, 2001. [Google Scholar]
- Engelbrecht, A.P. Computational Intelligence: An Introduction; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Hussain, K.; Salleh, M.N.M.; Cheng, S.; Shi, Y.H. Metaheuristic research: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2191–2233. [Google Scholar] [CrossRef] [Green Version]
- Houssein, E.H.; Gad, A.G.; Hussain, K.; Suganthan, P.N. Major Advances in Particle Swarm Optimization: Theory, Analysis, and Application. Swarm Evol. Comput. 2021, 63, 1–39. [Google Scholar] [CrossRef]
- Pace, F.; Santilano, A.; Godio, A. A Review of Geophysical Modeling Based on Particle Swarm Optimization. Surv. Geophys. 2021, 42, 1–45. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the International Conference on Neural Networks (ICNN’95), Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Wang, D.S.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Poli, R. Analysis of the Publications on the Applications of Particle Swarm Optimisation. J. Artif. Evol. Appl. 2008, 2008, 1–10. [Google Scholar] [CrossRef]
- Adhan, S.; Bansal, P. Applications and variants of particle swarm optimization: A review. Int. J. Electron. Electr. Comput. Syst. 2017, 6, 215–223. [Google Scholar]
- Ratnaweera, A.; Halgamuge, S.K.; Watson, H.C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefcients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar] [CrossRef]
- Perez, R.E.; Behdinan, K. Particle swarm approach for structural design optimization. Comput. Struct. 2007, 85, 1579–1588. [Google Scholar] [CrossRef]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S. Adaptive particle swarm optimization. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 1362–1381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gou, J.; Lei, Y.X.; Guo, W.P.; Wang, C.; Cai, Y.Q.; Luo, W. A novel improved particle swarm optimization algorithm based on individual diference evolution. Appl. Soft Comput. 2017, 57, 468–481. [Google Scholar] [CrossRef]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Margarita, R.-S.; Carlos, A.C.C. Multi-objective particle swarm optimizers: A survey of the state-of-the-art. Int. J. Comput. Intell. Res. 2006, 2, 287–308. [Google Scholar]
- Tripathi, P.K.; Bandyopadhyay, S.; Pal, S.K. Multi-Objective Particle Swarm Optimization with time variant inertia and acceleration coefficients. Inf. Sci. 2007, 177, 5033–5049. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Sun, S.; Corchado, J.M.; Siyau, M.F. A particle dyeing approach for track continuity for the SMC-PHD filter. In Proceedings of the 17th International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particles | Iterations | m_CR | sd_CR | m_AY | sd_AY |
|---|---|---|---|---|---|
| 5 | 5 | 23.1972% | 0.0237% | 98.3321% | 0.0102% |
| 10 | 5 | 22.5092% | 0.0211% | 98.354% | 0.0069% |
| 20 | 10 | 21.6146% | 0.0182% | 98.3918% | 0.0062% |
| 40 | 15 | 21.2099% | 0.0171% | 98.4182% | 0.0047% |
| Particles | Iterations | Compression Ratio | m_AY | sd_AY |
|---|---|---|---|---|
| 5 | 5 | 20% | 82.7117% | 0.0431% |
| 10 | 5 | 20% | 83.1876% | 0.0368% |
| 20 | 10 | 20% | 84.1799% | 0.0249% |
| 5 | 5 | 30% | 86.6399% | 0.0347% |
| 10 | 5 | 30% | 87.4521% | 0.0254% |
| 20 | 10 | 30% | 88.6618% | 0.0189% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, Z.; Xue, L.; Ding, F.; Li, D. PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence. ISPRS Int. J. Geo-Inf. 2021, 10, 817. https://doi.org/10.3390/ijgi10120817
Ouyang Z, Xue L, Ding F, Li D. PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence. ISPRS International Journal of Geo-Information. 2021; 10(12):817. https://doi.org/10.3390/ijgi10120817
Chicago/Turabian StyleOuyang, Zhihong, Lei Xue, Feng Ding, and Da Li. 2021. "PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence" ISPRS International Journal of Geo-Information 10, no. 12: 817. https://doi.org/10.3390/ijgi10120817
APA StyleOuyang, Z., Xue, L., Ding, F., & Li, D. (2021). PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence. ISPRS International Journal of Geo-Information, 10(12), 817. https://doi.org/10.3390/ijgi10120817