
A Continuous Taxi Pickup Path Recommendation under The Carbon Neutrality Context



Abstract
:1. Introduction
- (1)
- To overcome the sparsity of trip data, we construct a two-layer structure to reduce the relational space with the coarse-grained graph, which can better extract the implicit structure of the spatiotemporal association of trips.
- (2)
- We design a self-learning semantic relation to capture the dynamic spatial features between trips, combining that with a spatiotemporal neural network to mine the temporal patterns of travel behaviors.
- (3)
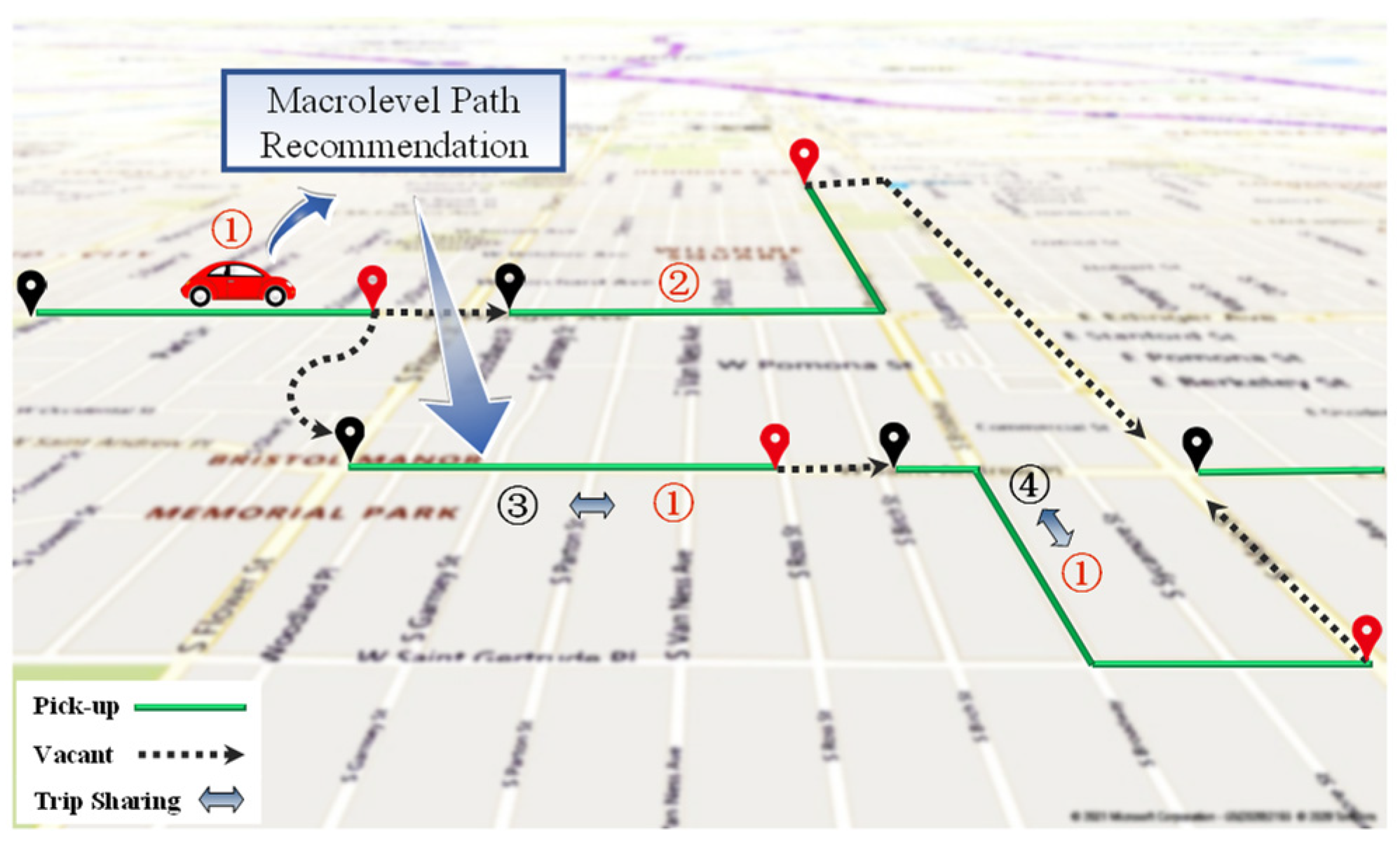
- Without changing the existing travel patterns, we propose a macrolevel path recommendation method for continuous pick-up passengers that seeks the match between passenger demands and taxi service utilization.
2. Related Work
3. Preliminaries
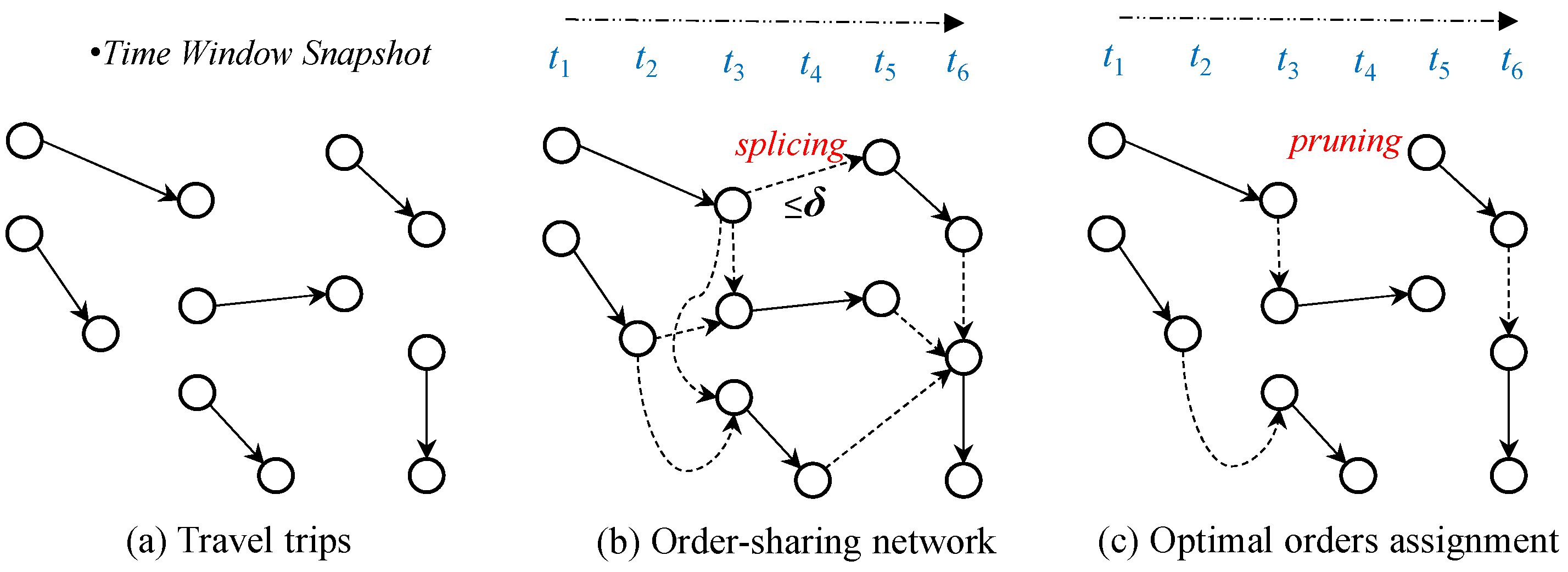
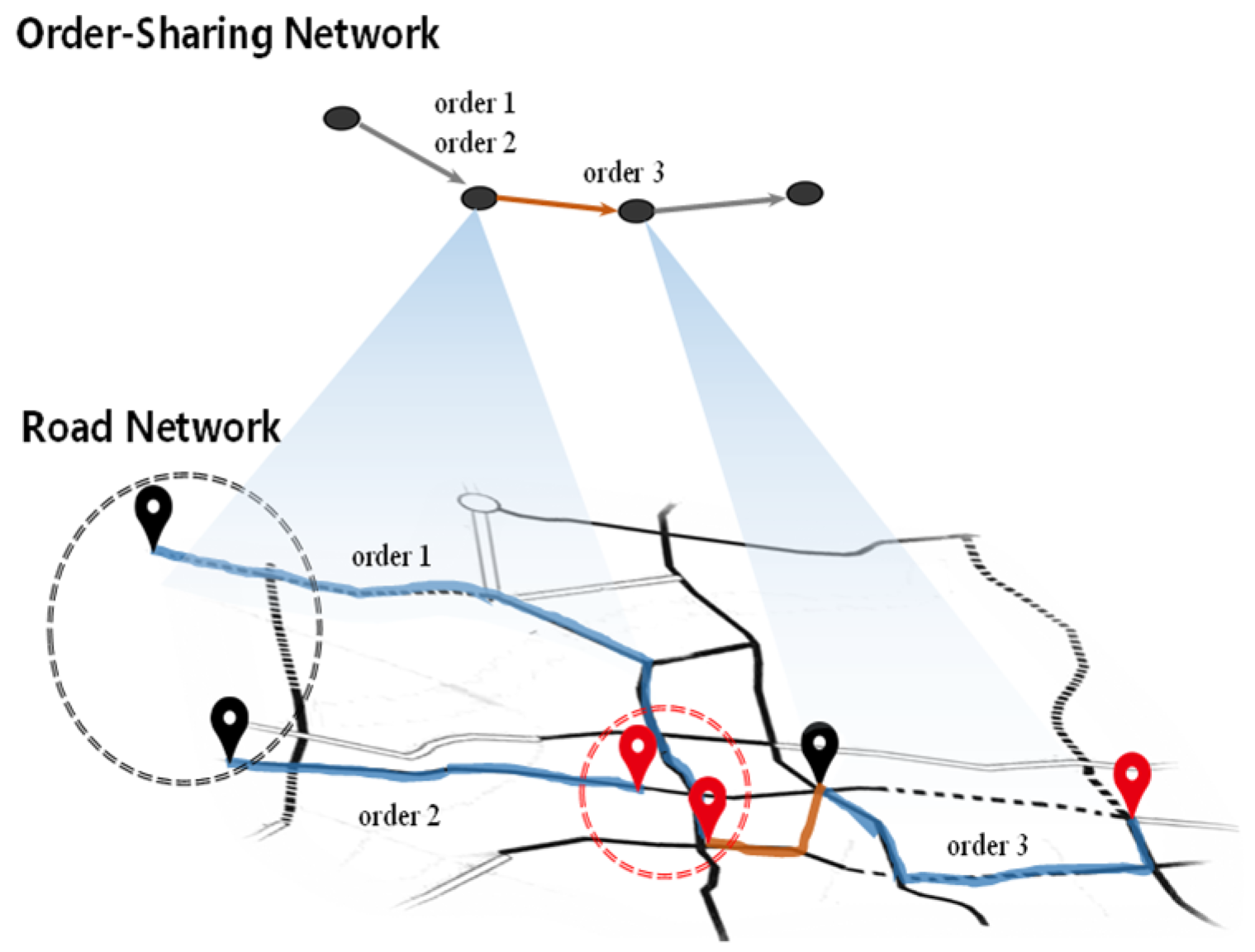
3.1. Taxi Trajectory Sharing Network
3.2. Problem Definition for Continuous Taxi Pickup Path Recommendation
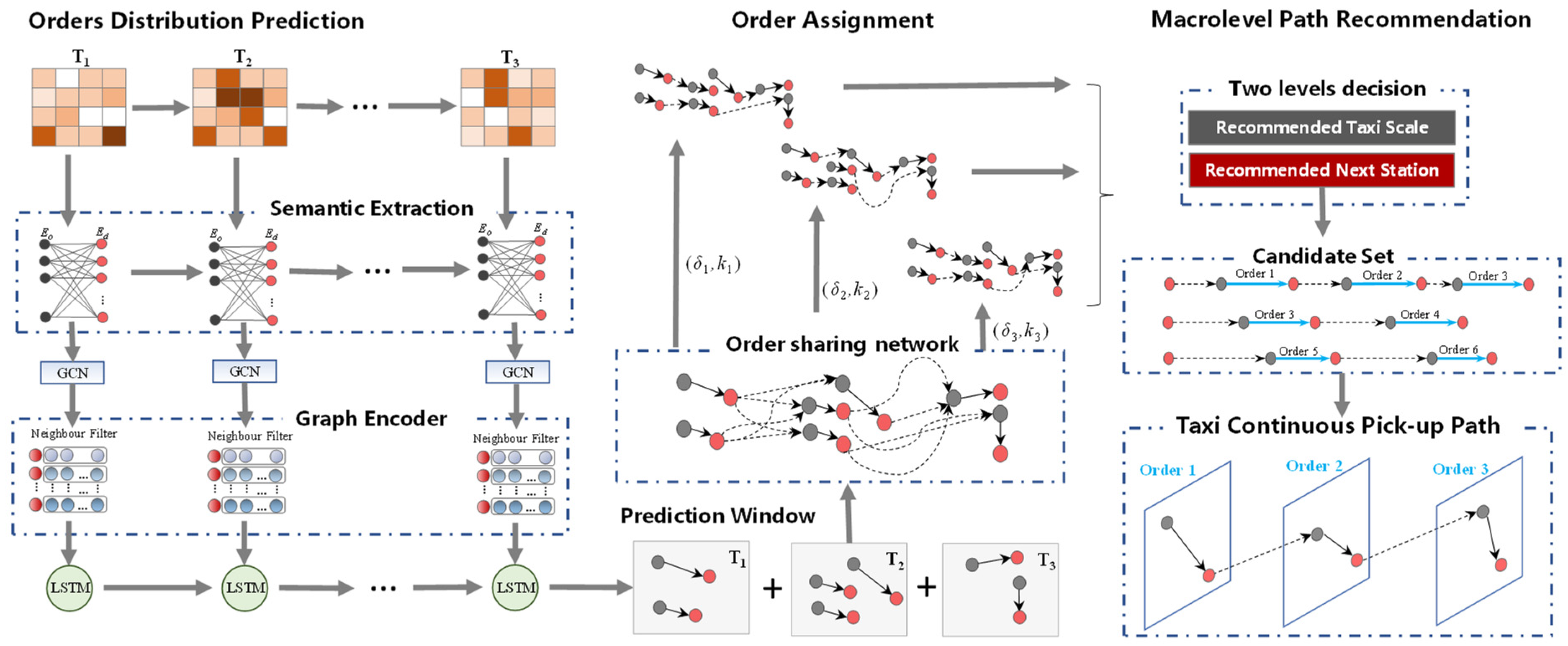
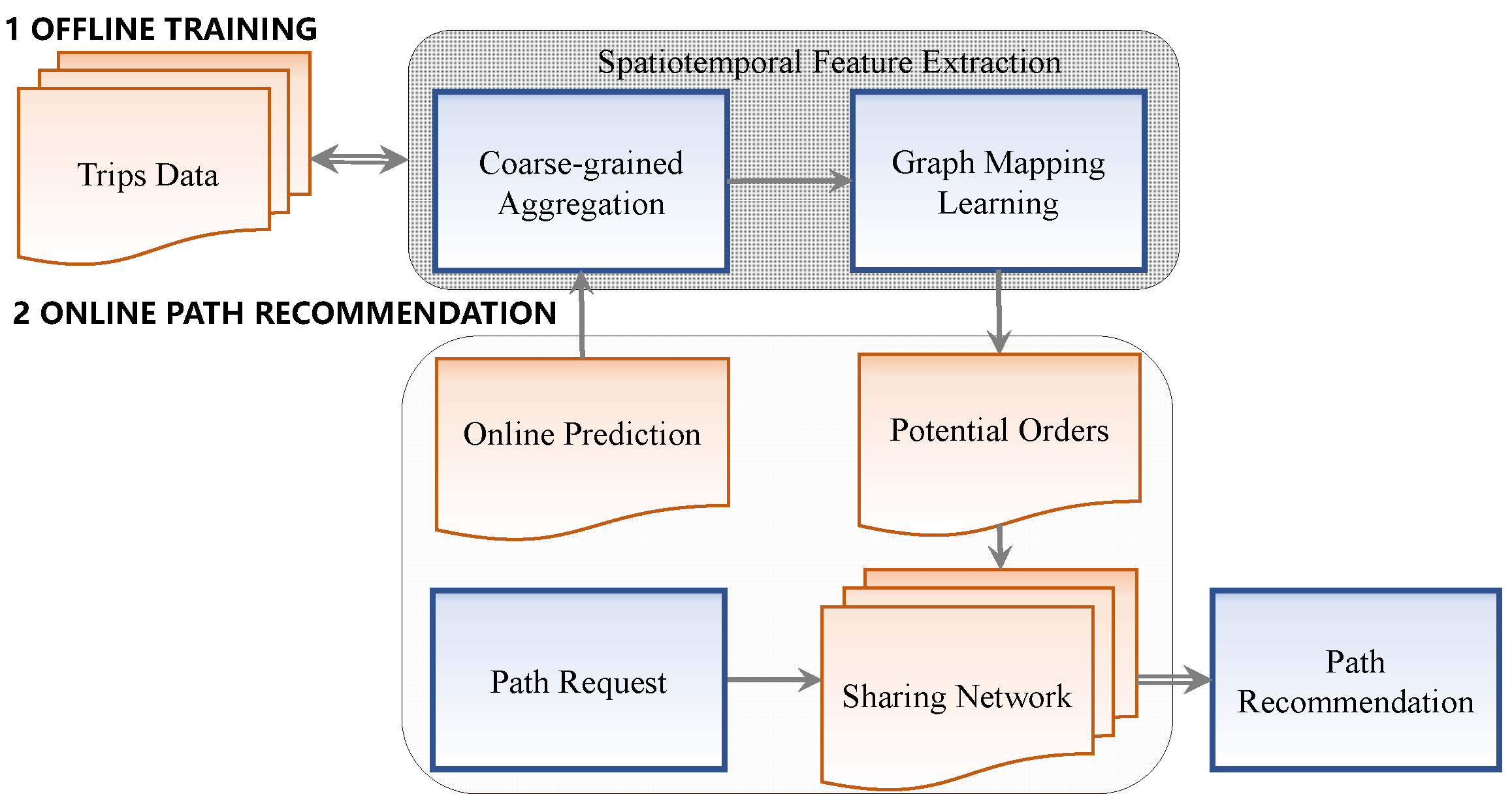
4. Continuous Taxi Pickup (CTPU) Path Recommendation Architecture
4.1. Travel Trip Predictions Based on Self-Learning Semantic Relation
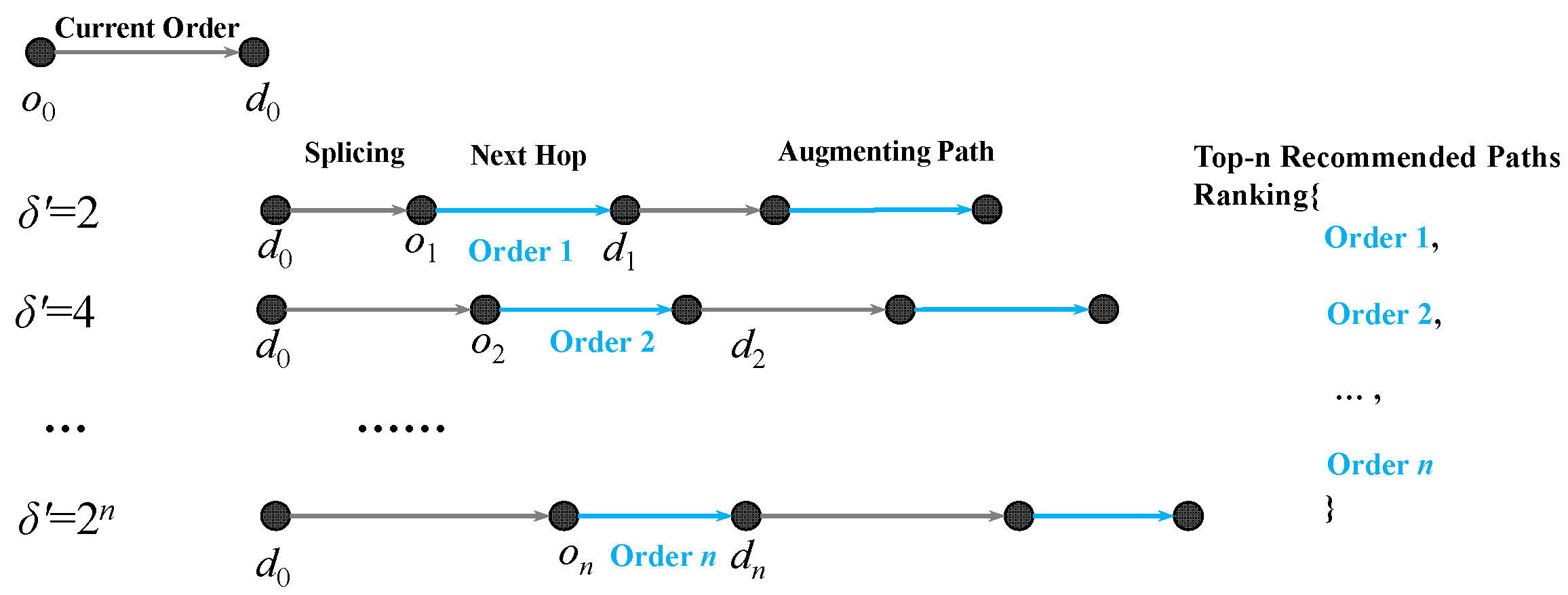
4.2. Continuous Passenger Pick-Up Path Recommendation
4.3. CTPURec Optimization
5. Experimental Results and Analysis
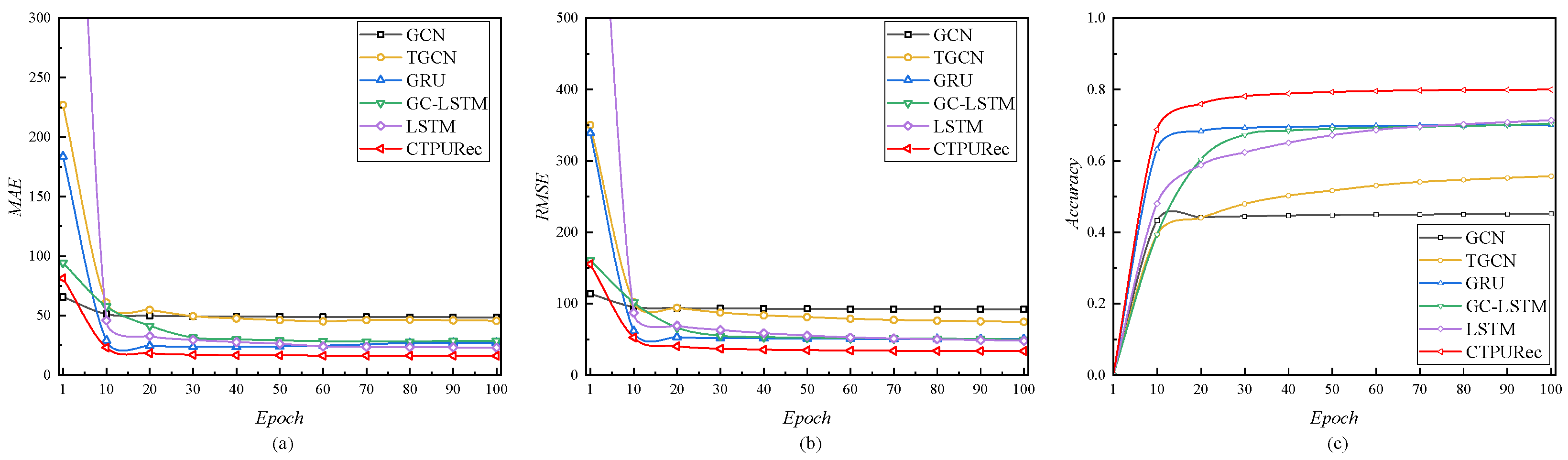
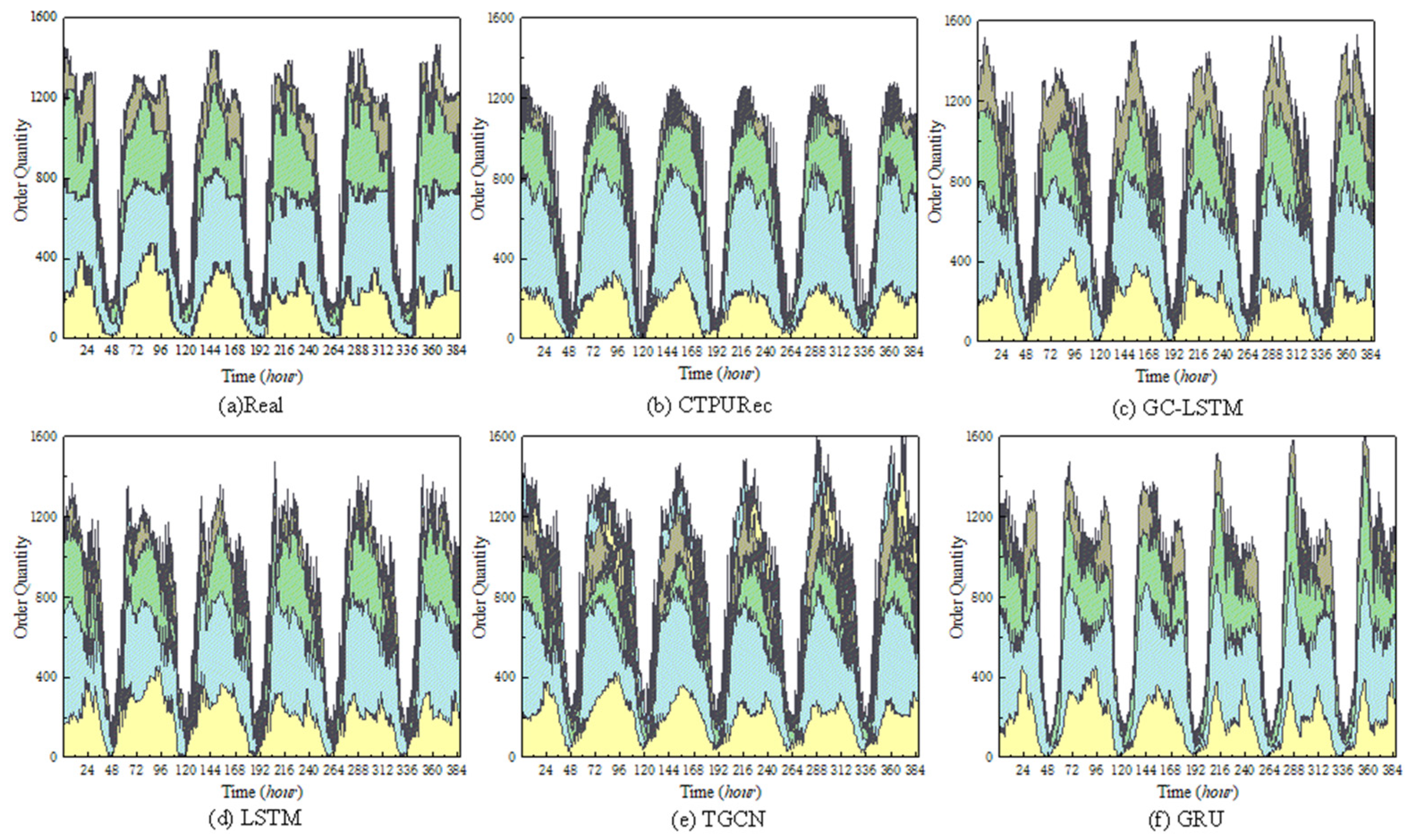
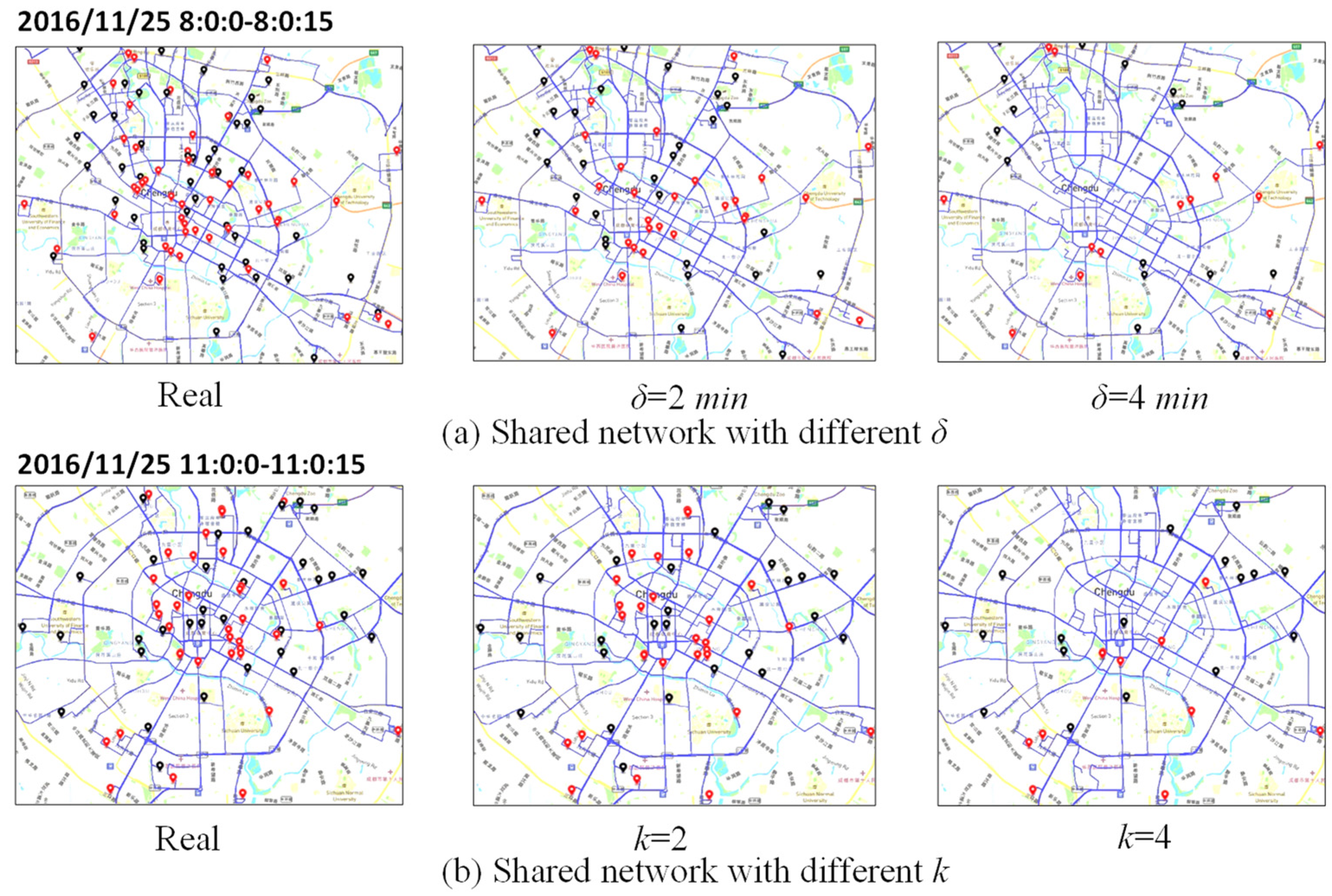
5.1. Potential Trips Sharing Network Distribution Prediction
5.2. The Splicing Efficiency of Taxi Pickup Path with Different Parameters
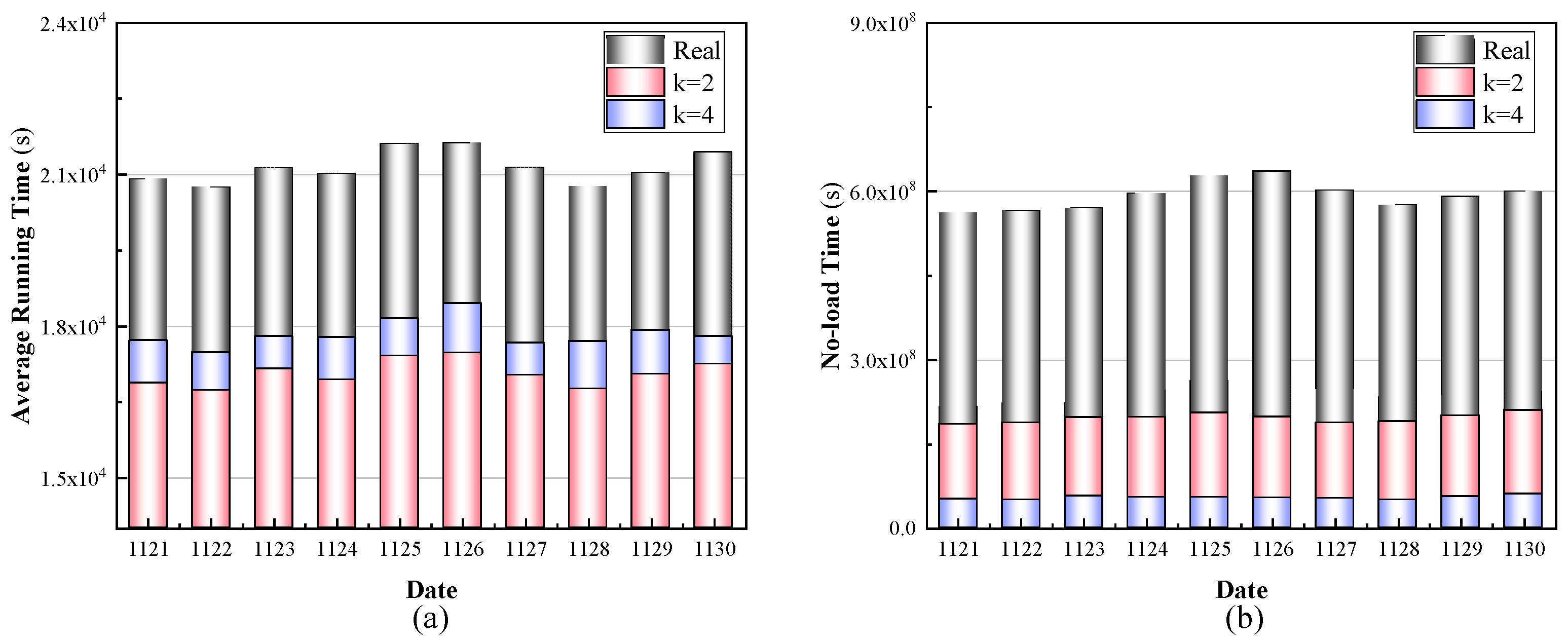
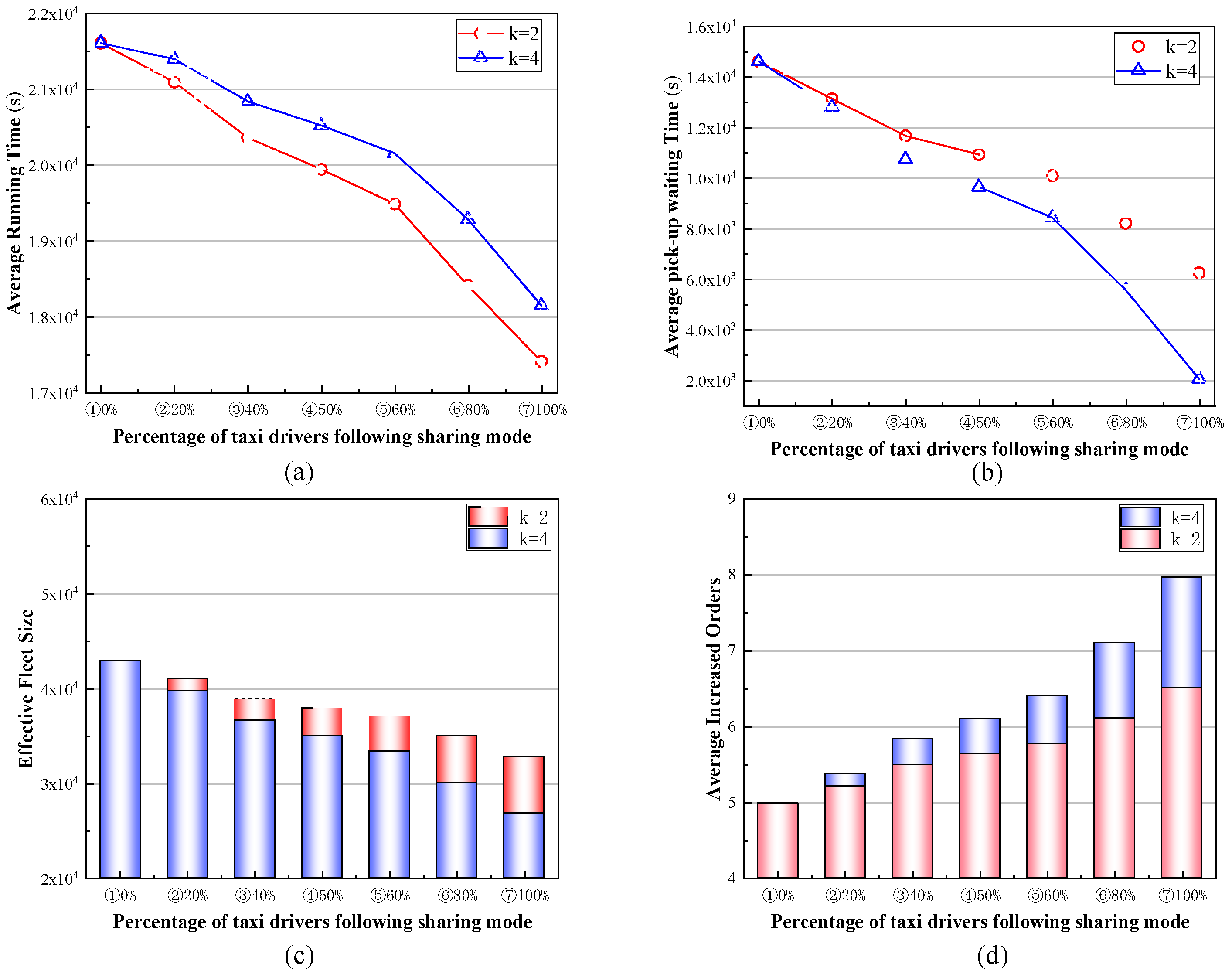
5.3. Optimization for Taxi System with Continuous Pickup Paths
5.4. The Implementation Phase
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, Y.; Anwar, T.; Yang, J.; Wu, J. dFDA-VeD: A Dynamic Future Demand Aware Vehicle Dispatching System. In 17th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services; Association for Computing Machinery, Inc.: New York, NY, USA, 2020; pp. 366–375. [Google Scholar]
- Tang, J.; Jiang, H.; Li, Z.; Li, M.; Liu, F.; Wang, Y. A two-layer model for taxi customer searching behaviors using GPS trajectory data. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3318–3324. [Google Scholar] [CrossRef]
- Lai, Y.; Lv, Z.; Li, K.; Liao, M. Urban traffic coulomb’s law: A new approach for taxi route recommendation. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3024–3037. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Xu, Y.; Huang, Q. Multiagent Reinforcement Learning-Based Taxi Predispatching Model to Balance Taxi Supply and Demand. J. Adv. Transp. 2020, 2020, 8674512. [Google Scholar] [CrossRef] [Green Version]
- Santi, P.; Tatti, C. A future of shared mobility. Urban Regen 2017, 10, 328–333. [Google Scholar]
- Zhang, R.; Pavone, M. Control of robotic mobility-on-demand systems: A queueing-theoretical perspective. Int. J. Robot. Res. 2016, 35, 186–203. [Google Scholar] [CrossRef]
- Li, L.; Wang, S.; Wang, F.Y. An Analysis of Taxi Driver’s Route Choice Behavior Using the Trace Records. IEEE Trans. Comput. Soc. Syst. 2018, 5, 576–582. [Google Scholar] [CrossRef]
- Moreira-Matias, L.; Gama, J.; Ferreira, M.; Mendes-Moreira, J.; Damas, L. On Predicting the Taxi-Passenger Demand: A Real-Time Approach. In Portuguese Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8154, pp. 54–65. [Google Scholar]
- Wang, Y.; Yin, H.; Chen, H.; Wo, T.; Xu, J.; Zheng, K. Origin-destination matrix prediction via graph convolution: A new perspective of passenger demand modeling. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 1227–1235. [Google Scholar]
- Liu, L.; Qiu, Z.; Li, G.; Wang, Q.; Ouyang, W.; Lin, L. Contextualized Spatial-Temporal Network for Taxi Origin-Destination Demand Prediction. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3875–3887. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Yu, Z.; Qi, D. Deep Spatio-Temporal Residual Networks for Citywide Crowd Flows Prediction. arXiv 2017, arXiv:1610.00081v2. [Google Scholar]
- Tang, J.; Liang, J.; Liu, F.; Hao, J.; Wang, Y. Multi-community passenger demand prediction at region level based on spatio-temporal graph convolutional network. Transp. Res. Part C Emerg. Technol. 2021, 124, 102951. [Google Scholar] [CrossRef]
- Alberto, R.; Gianni, R.; Monica, B.; Bruno, L. Modelling Taxi Drivers’ Behaviour for the Next Destination Prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2980–2989. [Google Scholar]
- Niu, K.; Cheng, C.; Chang, J.; Zhang, H.; Zhou, T. Real-Time Taxi-Passenger Prediction with L-CNN. IEEE Trans. Veh. Technol. 2019, 68, 4122–4129. [Google Scholar] [CrossRef]
- Yuan, J.; Zheng, Y.; Zhang, L.; Xie, X.; Sun, G. Where to find my next passenger? In Proceedings of the 13th International Conference on Ubiquitous Computing, Beijing, China, 17–21 September 2011; ACM: New York, NY, USA, 2011; pp. 109–118. [Google Scholar]
- Li, X.; Pan, G.; Wu, Z.; Qi, G.; Li, S.; Zhang, D.; Zhang, W.; Wang, Z. Prediction of urban human mobility using large-scale taxi traces and its applications. Front. Comput. Sci. 2012, 6, 111–121. [Google Scholar]
- Wallar, A.; Alonso-Mora, J.; Rus, D. Optimizing Vehicle Distributions and Fleet Sizes for Shared Mobility-on-Demand. In Proceedings of the 2009 International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 1794–1800. [Google Scholar]
- Spieser, K.; Samaranayake, S.; Gruel, W.; Frazzoli, E. Shared-vehicle mobility-on-demand systems: A fleet operators guide to rebalancing empty vehicles. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016; pp. 1–15. [Google Scholar]
- Alonso-Mora, J.; Wallar, A.; Rus, D. Predictive routing for autonomous mobility-on-demand systems with ride-sharing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3583–3590. [Google Scholar]
- Alonso-Mora, J.; Samaranayake, S.; Wallar, A.; Frazzoli, E.; Rus, D. On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment. Proc. Natl. Acad. Sci. USA 2017, 114, 462–467. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qu, B.; Yang, W.; Cui, G.; Wang, X. Profitable Taxi Travel Route Recommendation Based on Big Taxi Trajectory Data. IEEE Trans. Intell. Transp. Syst. 2020, 21, 653–668. [Google Scholar] [CrossRef]
- Hsieh, H.P.; Lin, F. Recommending taxi routes with an advance reservation—A multi-criteria route planner. Int. J. Urban Sci. 2021, 3, 1–22. [Google Scholar] [CrossRef]
- Tang, J.; Wang, Y.; Hao, W.; Liu, F.; Huang, H.; Wang, Y. A Mixed Path Size Logit-Based Taxi Customer-Search Model Considering Spatio-Temporal Factors in Route Choice. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1347–1358. [Google Scholar] [CrossRef]
- Ji, S.; Wang, Z.; Li, T.; Zheng, Y. Spatio-temporal feature fusion for dynamic taxi route recommendation via deep reinforcement learning. Knowl.-Based Syst. 2020, 205, 106302. [Google Scholar] [CrossRef]
- Santi, P.; Resta, G.; Szell, M.; Sobolevsky, S.; Storgatz, S.; Ratti, C. Quantifying the benefits of vehicle pooling with shareability networks. Proc. Natl. Acad. Sci. USA 2014, 111, 13290–13294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vazifeh, M.; Santi, P.; Resta, G.; Strogatz, S.; Ratti, C. Addressing the minimum fleet problem in on-demand urban mobility. Nature 2018, 557, 534. [Google Scholar] [CrossRef]
- Jiang, W.; Luo, J. Graph Neural Network for Traffic Forecasting: A Survey. arXiv 2021, arXiv:2101.11174. [Google Scholar]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph WaveNet for Deep Spatial-Temporal Graph Modeling. arXiv 2019, arXiv:1906.00121. [Google Scholar]
- Xu, K.; Li, C.; Tian, Y.; Sonobe, T.; Kawarabayashi, K.; Jegelka, S. Representation learning on graphs with jumping knowledge networks. Proceeding ICML 2018, 80, 5449–5458. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. In Proceedings of the 30th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016; pp. 3837–3845. [Google Scholar]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent Neural Network Regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Fu, R.; Zhang, Z.; Li, L. Using lstm and gru neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 324–328. [Google Scholar]
- Thomas, N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3848–3858. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Xu, X.; Wu, Y.; Zheng, H. GC-LSTM: Graph Convolution Embedded LSTM for Dynamic Link Prediction. arXiv 2018, arXiv:1812.04206. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Length | 1 h | 2 h | 3 h | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Metric | MAE | RMSE | Accuracy | MAE | RMSE | Accuracy | MAE | RMSE | Accuracy |
| GCN | 43.73 | 85.61 | 0.492 | 45.35 | 87.30 | 0.481 | 46.51 | 88.51 | 0.473 |
| T-GCN | 29.76 | 48.69 | 0.711 | 29.77 | 50.49 | 0.700 | 32.31 | 53.07 | 0.684 |
| GRU | 14.78 | 27.81 | 0.835 | 19.10 | 32.99 | 0.804 | 27.08 | 50.22 | 0.701 |
| LSTM | 14.74 | 26.35 | 0.844 | 20.67 | 32.02 | 0.810 | 22.58 | 45.72 | 0.728 |
| GC-LSTM | 14.46 | 27.27 | 0.835 | 18.70 | 33.73 | 0.800 | 22.83 | 40.96 | 0.756 |
| CTPURec | 12.68 | 25.02 | 0.851 | 13.97 | 27.81 | 0.835 | 15.28 | 30.49 | 0.819 |
| %Improve | 12.31% | 5.05% | 0.83% | 25.29% | 13.15% | 3.09% | 32.33% | 25.56% | 8.33% |
| Date | 1121 | 1122 | 1123 | 1124 | 1125 | 1126 | 1127 | 1128 | 1129 | 1130 |
|---|---|---|---|---|---|---|---|---|---|---|
| Real | 14,592 | 14,399 | 14,691 | 14,581 | 14,617 | 14,685 | 14,555 | 14,345 | 14,480 | 14,883 |
| k = 2 | 6297 | 6257 | 6631 | 6383 | 6236 | 6014 | 5944 | 6159 | 6387 | 6710 |
| k = 4 | 2143 | 2049 | 2328 | 2175 | 2030 | 2010 | 2038 | 1993 | 2171 | 2353 |
| k = 8 | 2173 | 2222 | 2102 | 2200 | 2058 | 1859 | 1523 | 2489 | 2619 | 2208 |
| k = 16 | 7122 | 7168 | 7301 | 7179 | 7257 | 6360 | 5594 | 7993 | 8197 | 7871 |
| Date | 1121 | 1122 | 1123 | 1124 | 1125 | 1126 | 1127 | 1128 | 1129 | 1130 |
|---|---|---|---|---|---|---|---|---|---|---|
| Real | 38,500 | 39,279 | 38,785 | 40,885 | 42,889 | 43,257 | 41,317 | 40,096 | 40,771 | 40,297 |
| k = 2 | 29,258 | 29,883 | 29,632 | 30,842 | 32,819 | 32,897 | 31,487 | 30,735 | 31,267 | 31,193 |
| k = 4 | 23,715 | 24,281 | 24,230 | 25,015 | 26,830 | 26,651 | 25,697 | 25,042 | 25,568 | 25,504 |
| k = 8 | 17,928 | 18,349 | 18,470 | 18,866 | 20,178 | 20,168 | 19,378 | 18,752 | 19,326 | 19,315 |
| k = 16 | 13,231 | 13,575 | 13,602 | 13,842 | 14,773 | 14,730 | 14,114 | 13,739 | 14,274 | 14,168 |
| Date | 1121 | 1122 | 1123 | 1124 | 1125 | 1126 | 1127 | 1128 | 1129 | 1130 |
|---|---|---|---|---|---|---|---|---|---|---|
| Real | 4.98 | 4.96 | 5.10 | 4.85 | 4.98 | 4.91 | 4.90 | 4.99 | 5.10 | 5.17 |
| k = 2 | 6.55 | 6.52 | 6.68 | 6.44 | 6.51 | 6.46 | 6.43 | 6.52 | 6.65 | 6.68 |
| k = 4 | 8.08 | 8.02 | 8.17 | 7.94 | 7.96 | 7.97 | 7.89 | 8.00 | 8.13 | 8.17 |
| k = 8 | 10.69 | 10.62 | 10.72 | 10.53 | 10.59 | 10.54 | 10.46 | 10.68 | 10.76 | 10.79 |
| k = 16 | 14.49 | 14.36 | 14.56 | 14.35 | 14.46 | 14.43 | 14.36 | 14.58 | 14.57 | 14.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, M.; Chi, Y.; Ding, Z.; Tian, J.; Zheng, Y. A Continuous Taxi Pickup Path Recommendation under The Carbon Neutrality Context. ISPRS Int. J. Geo-Inf. 2021, 10, 821. https://doi.org/10.3390/ijgi10120821
Chang M, Chi Y, Ding Z, Tian J, Zheng Y. A Continuous Taxi Pickup Path Recommendation under The Carbon Neutrality Context. ISPRS International Journal of Geo-Information. 2021; 10(12):821. https://doi.org/10.3390/ijgi10120821
Chicago/Turabian StyleChang, Mengmeng, Yuanying Chi, Zhiming Ding, Jing Tian, and Yuhao Zheng. 2021. "A Continuous Taxi Pickup Path Recommendation under The Carbon Neutrality Context" ISPRS International Journal of Geo-Information 10, no. 12: 821. https://doi.org/10.3390/ijgi10120821
APA StyleChang, M., Chi, Y., Ding, Z., Tian, J., & Zheng, Y. (2021). A Continuous Taxi Pickup Path Recommendation under The Carbon Neutrality Context. ISPRS International Journal of Geo-Information, 10(12), 821. https://doi.org/10.3390/ijgi10120821