
Exploiting a Semi-Automatic Point Cloud Segmentation Method to Improve the Quality of Rock-Mass Characterization. The Cima Grappa Conservative Restoration Case Study




Abstract
:1. Introduction
2. Materials and Methods
2.1. Classic Manually Performed Geo-Mechanical Scan-Line Survey
2.2. Remote Geo-Mechanical Survey
2.3. Acquisition Campaign
2.4. Point Clouds Segmentation for Remote Geo-Mechanical Survey
2.5. 3D Kinematic Stability Analysis of the Rock Mass
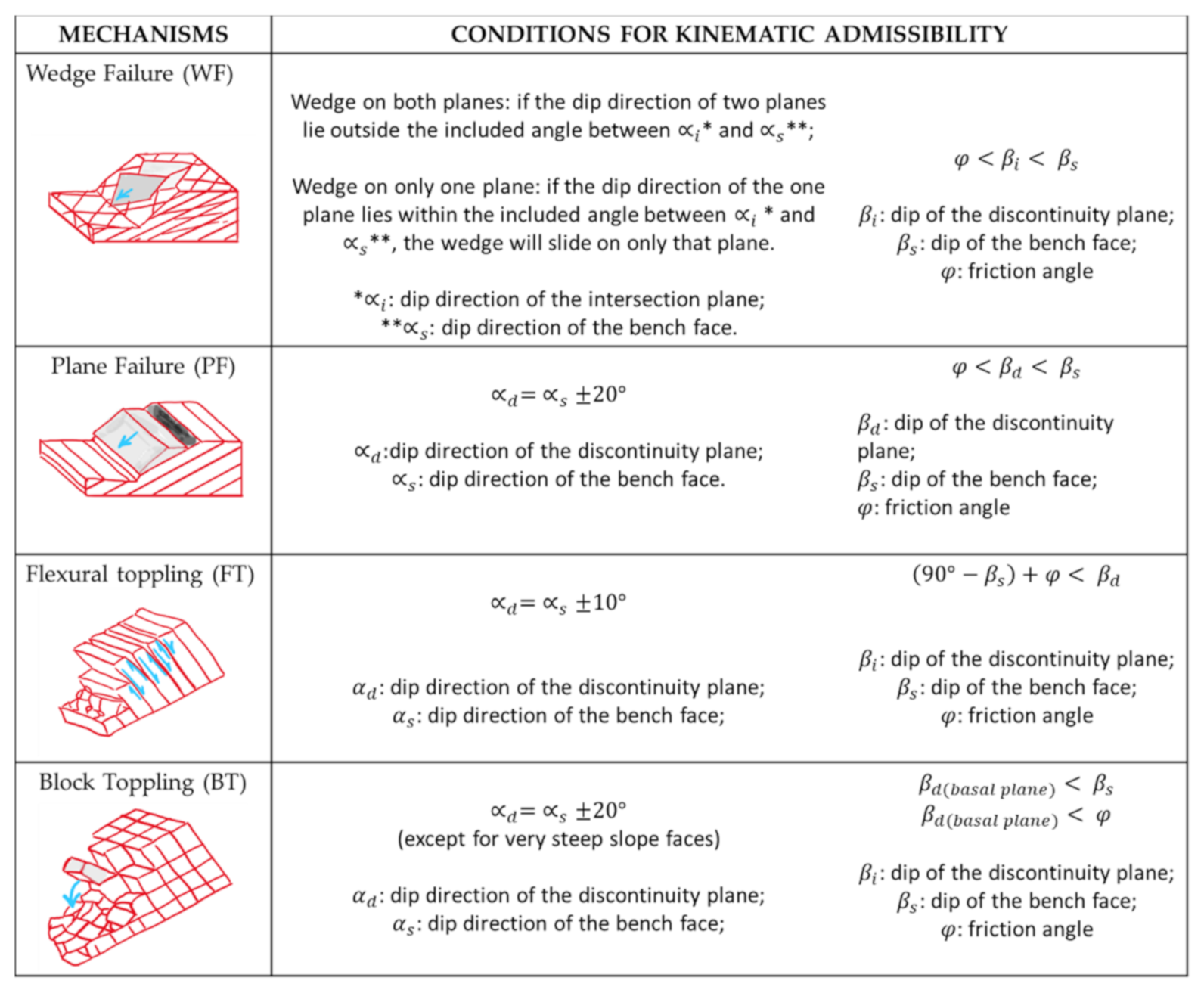
- the rock mass is divided into blocks by flat and infinitely persistent discontinuities;
- the shear resistance along the discontinuity planes is purely due to friction;
- the block system is subject to weight force only.
- Npf = number of poles of the discontinuities that satisfy the conditions for planar sliding;
- Iwf = number of the intersections of the discontinuities that satisfy the conditions for the sliding of wedges;
- Nbt = number of the poles of the discontinuities that satisfy the conditions for direct overturning;
- Ibt = number of intersection lines that satisfy the conditions for direct overturning;
- Nft = number of the poles of the discontinuities that satisfy the conditions for bending overturning.
2.6. Extraction of Detailed Meshes
3. Results
- (a)
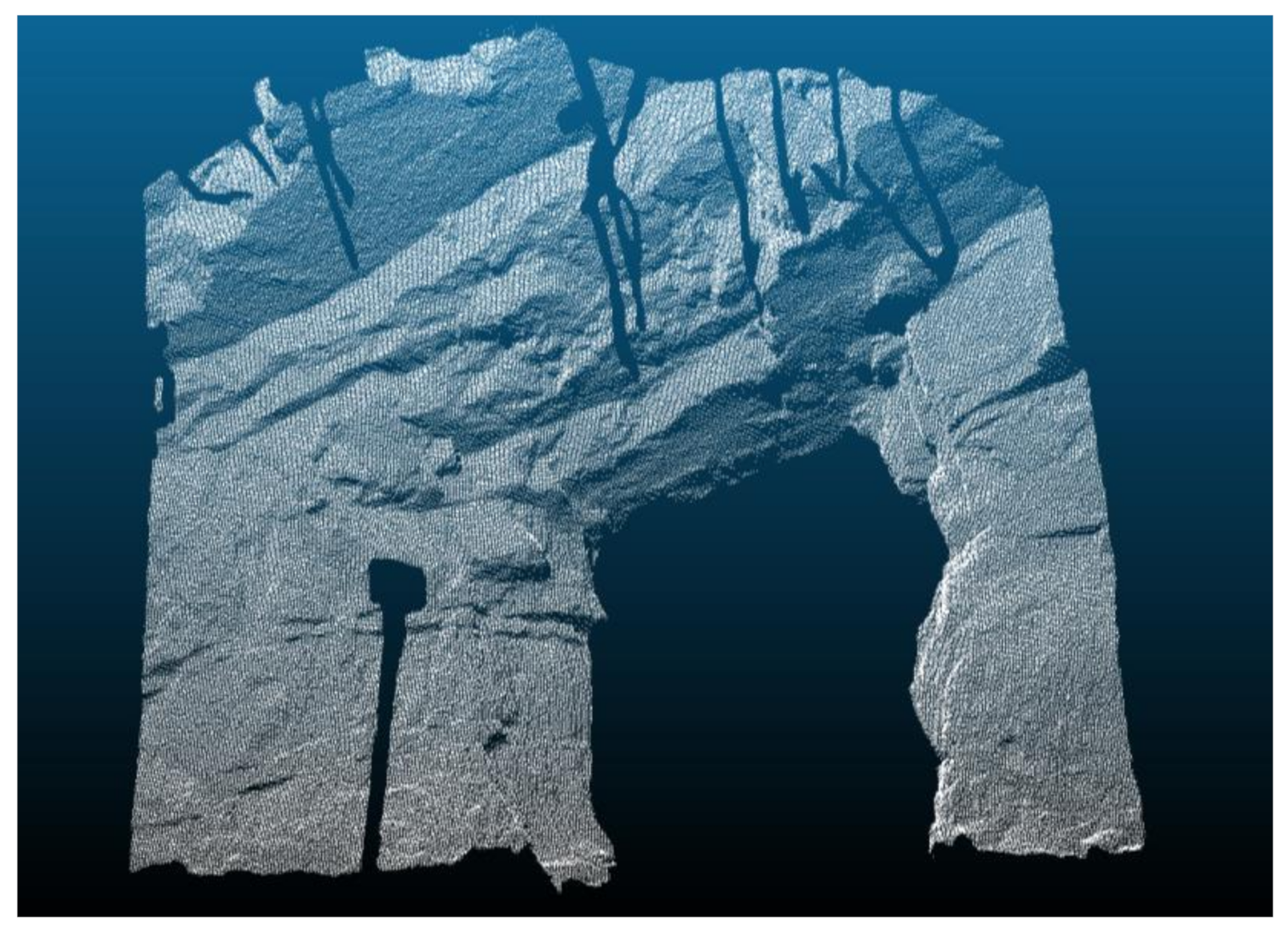
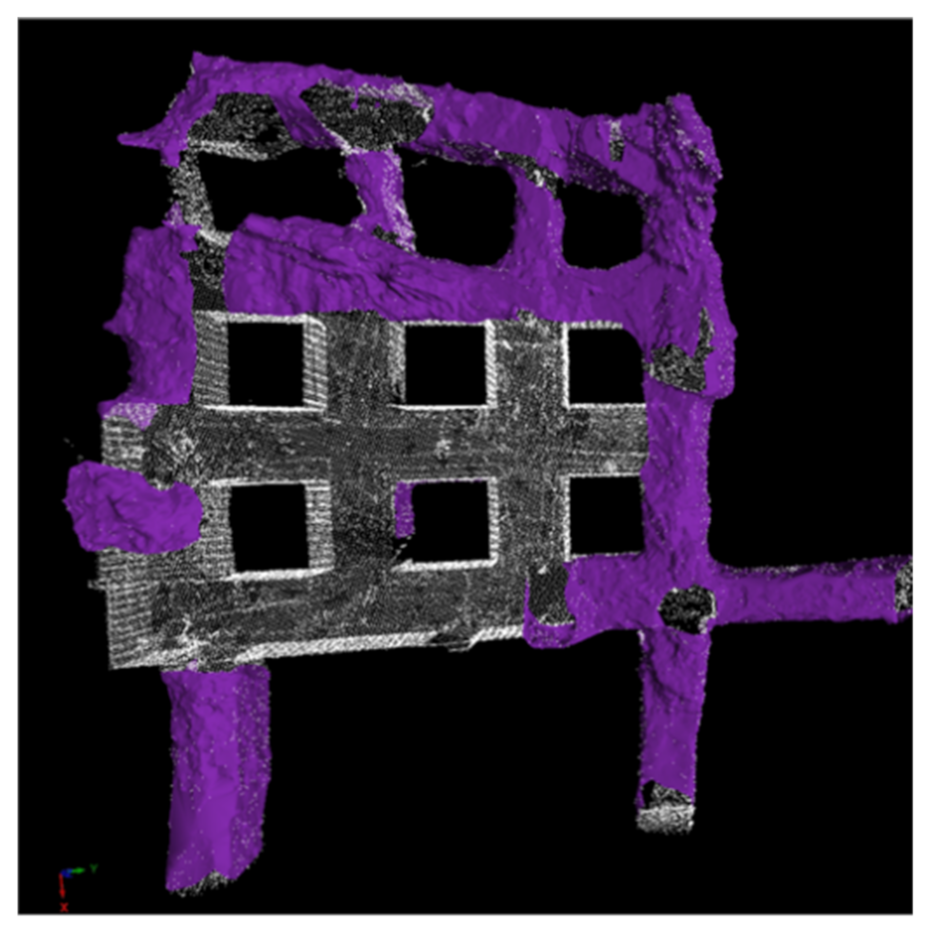
- Extracting a digital 3D model of the limestone rock-mass;
- (b)
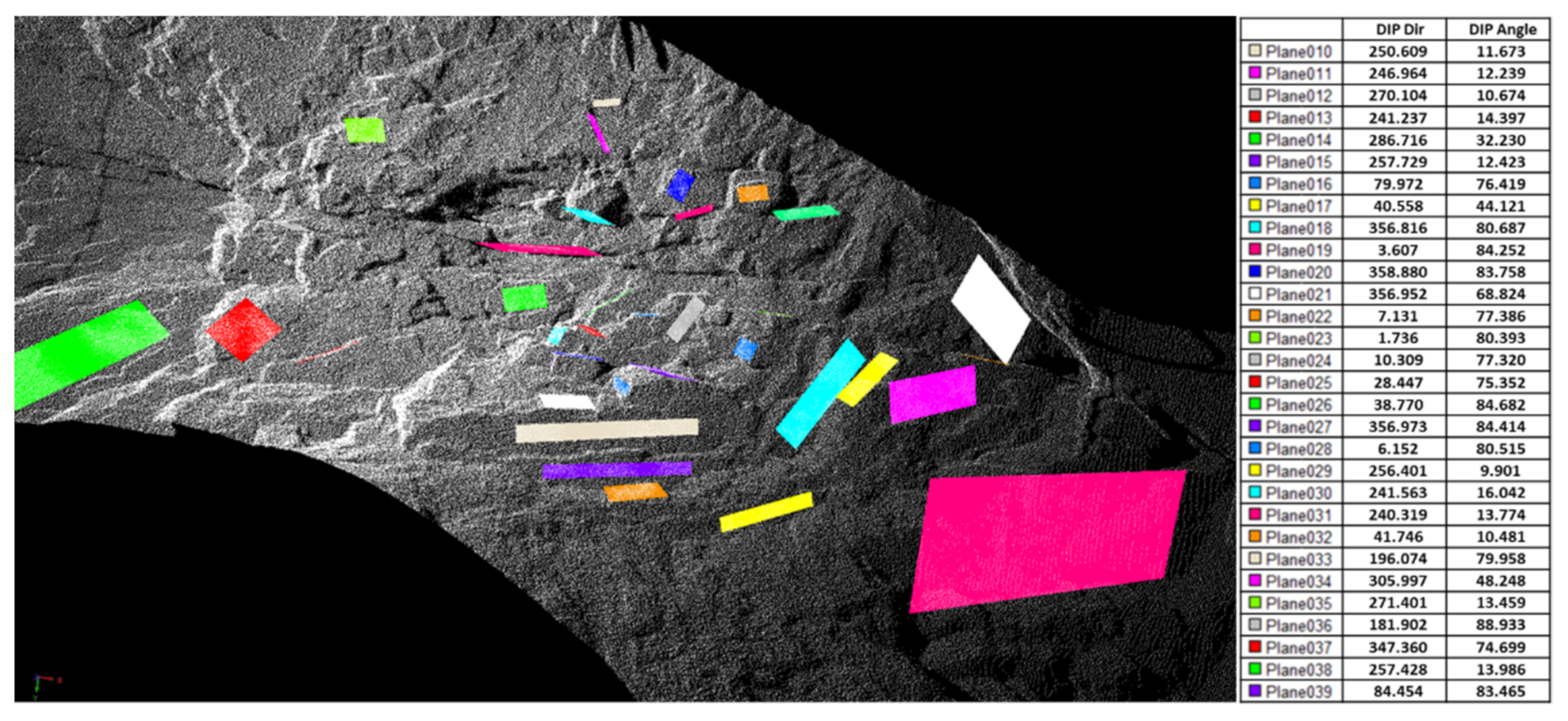
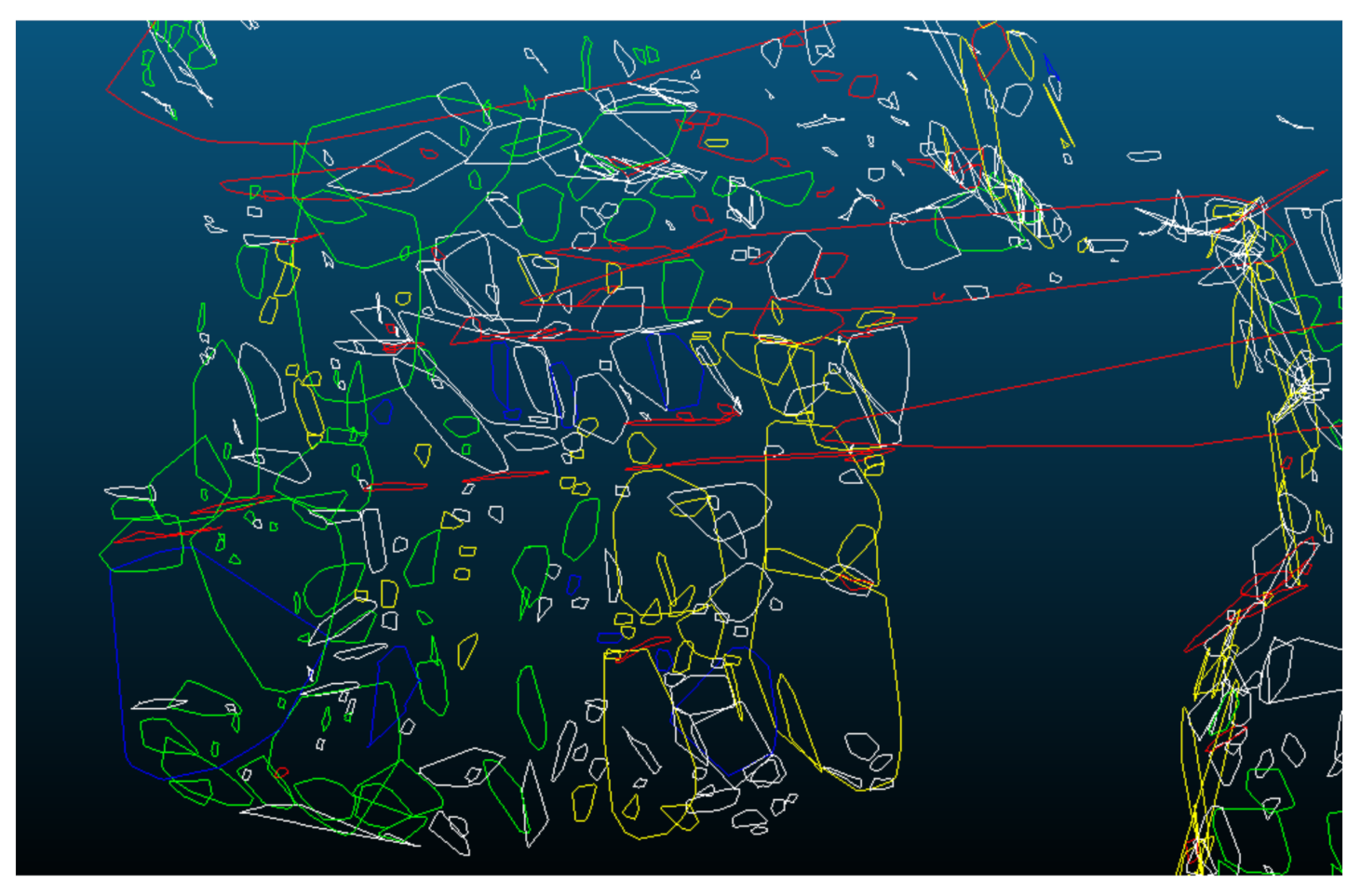
- Integrating the traditional geo-mechanical survey by identifying the main discontinuities affecting the rock mass and dividing them into families;
- (c)
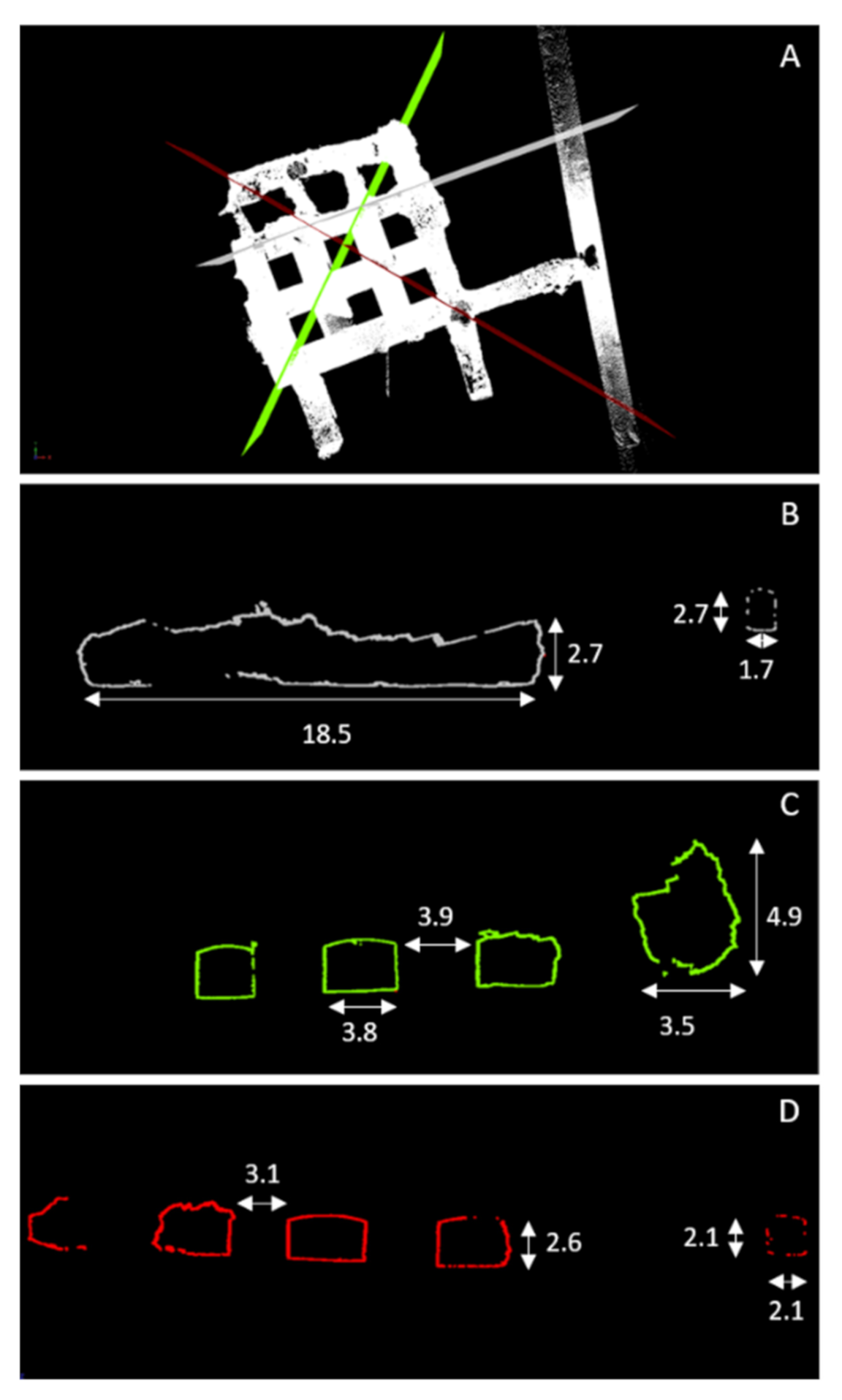
- Providing detailed geometric reconstruction of the collapse events that occurred;
- (d)
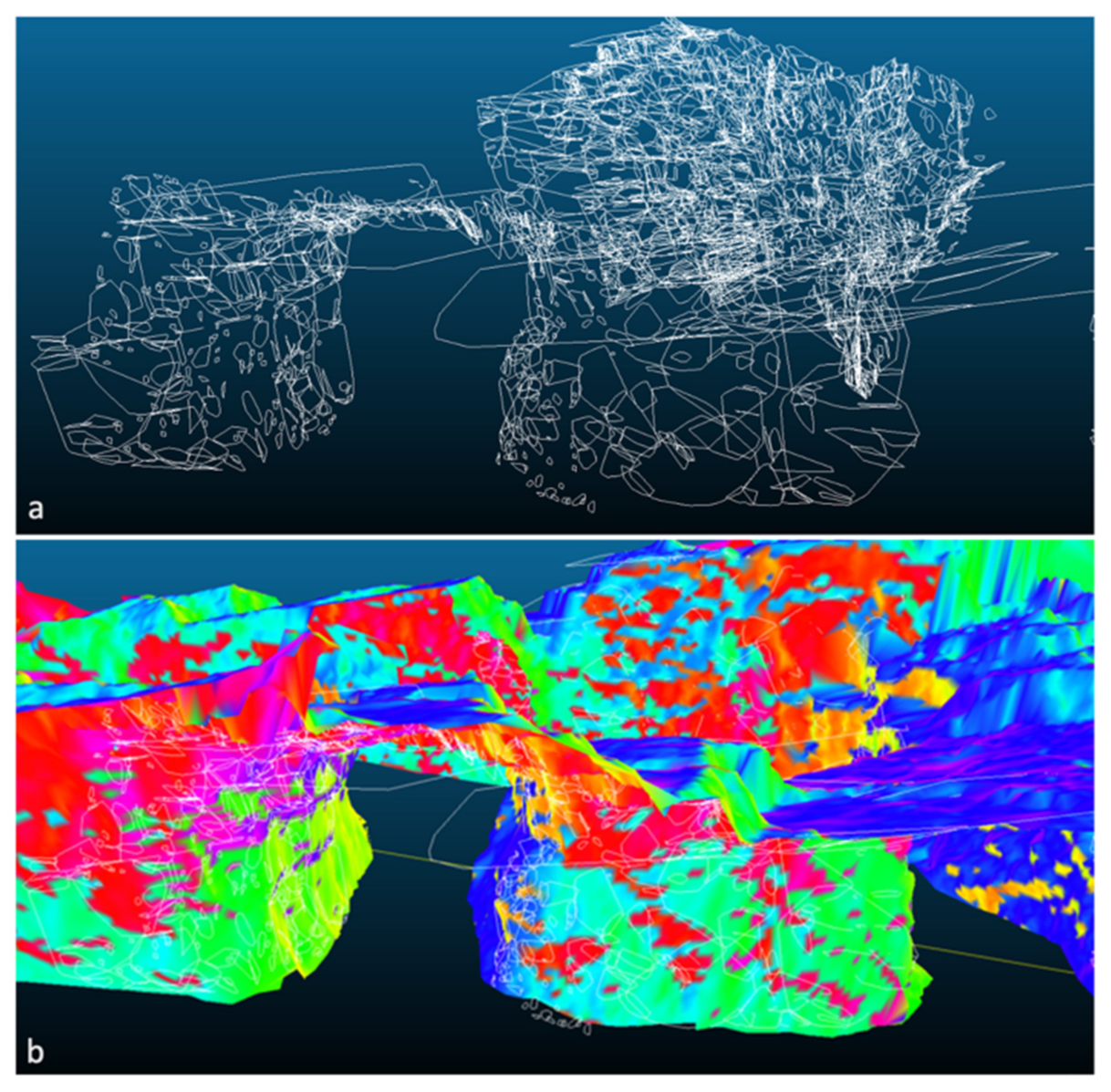
- Identifying main failure mechanisms of the rock mass in correspondence of the tunnels and underground spaces (kinematic analysis).
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Malone, H. Fascist Italy’s Ossuaries of the First World War: Objects or symbols? RIHA J. 2017, 0166. Available online: http://www.riha-journal.org/articles/2017/0150-0176-special-issue-war-graves/0166-malone (accessed on 10 February 2020).
- Barton, N.R.; Lien, R.; Lunde, J. Engineering classification of rock masses for the design of tunnel support. Rock Mech. 1974, 6, 189–239. [Google Scholar] [CrossRef]
- Bieniawski, Z.T. Engineering Rock Mass Classification; John Wiley and Sons: New York, NY, USA, 1989; 251p. [Google Scholar]
- Jaboyedoff, M.; Metzger, R.; Oppikofer, T.; Couture, R.; Derron, M.-H.; Locat, J.; Turmel, D. New insight techniques to analyze rock-slope relief using DEM and 3Dimaging cloud points: COLTOP-3D. In Proceedings of the 1st Canada-U.S. Rock Mechanics Symposium, American Rock Mechanics Association (ARMA), Vancouver, BC, Canada, 27–31 May 2007. [Google Scholar] [CrossRef]
- Li, X.; Chen, Z.; Chen, J.; Zhu, H. Automatic characterization of rock mass discontinuities using 3D point clouds. Eng. Geol. 2019, 259, 105131. [Google Scholar] [CrossRef]
- Riquelme, A.; Tomás, R.; Cano, M.; Pastor, J.L.; Abellán, A. Automatic mapping of discontinuity persistence on rock masses using 3D point clouds. Rock Mech. Rock Eng. 2018, 51, 3005–3028. [Google Scholar] [CrossRef]
- Bolkas, D.; Vazaios, I.; Peidou, A.; Vlachopoulos, N. Detection of rock discontinuity traces using terrestrial LiDAR data and space-frequency transforms. Geotech. Geol. Eng. 2018, 36, 1745–1765. [Google Scholar] [CrossRef]
- Feng, Q.; Röshoff, K. A survey of 3D laser scanning techniques for application to rock mechanics and rock engineering. In The ISRM Suggested Methods for Rock Characterization, Testing and Monitoring: 2007–2014; Springer: Cham, Switzerland, 2015; pp. 265–293. [Google Scholar]
- Gigli, G.; Casagli, N. Semi-automatic extraction of rock mass structural data from high-resolution LIDAR point clouds. Int. J. Rock Mech. Min. Sci. 2011, 48, 187–198. [Google Scholar] [CrossRef]
- Gomes, R.K.; De Oliveira, L.P.L.; Gonzaga, L.; Tognoli, F.M.W.; Veronez, M.R.; De Souza, M.K. An algorithm for automatic detection and orientation estimation of planar structures in LiDAR-scanned outcrops. Comput. Geosci. 2016, 90, 170–178. [Google Scholar] [CrossRef]
- Admassu, Y.; Shakoor, A. Cut slope design recommendations for sub-horizontal sedimentary rock units in Ohio, USA. Geotech. Geol. Eng. 2013, 31, 1207–1219. [Google Scholar] [CrossRef]
- Battulwar, R.; Zare-Naghadehi, M.; Emami, E.; Sattarvand, J. A state-of-the-art review of automated extraction of rock mass discontinuity characteristics using three-dimensional surface models. J. Rock Mech. Geotech. Eng. 2021, 1674–7755. [Google Scholar] [CrossRef]
- Guo, J.; Wu, L.; Zhang, M.; Liu, S.; Sun, X. Towards automatic discontinuity trace extraction from rock mass point cloud without triangulation. Int. J. Rock Mech. Min. Sci. 2018, 112, 226–237. [Google Scholar] [CrossRef]
- Henk, A.; Laux, D. Terrestrial laser scanning and fracture network characterization-perspectives for a (semi-) automatic analysis of point cloud data from outcrops. Z. Dt. Ges. Geowiss. Ger. J. Geol. 2015, 166, 99–118. [Google Scholar]
- Hu, L.; Xiao, J.; Wang, Y. Efficient and automatic plane detection approach for 3-D rock mass point clouds. Multimed. Tools Appl. 2019, 79, 839–864. [Google Scholar] [CrossRef]
- Kong, D.; Wu, F.; Saroglou, C. Automatic identification and characterization of discontinuities in rock masses from 3D point clouds. Eng. Geol. 2020, 265, 105442. [Google Scholar] [CrossRef]
- Zhang, P.; Li, J.; Yang, X.; Zhu, H. Semi-automatic extraction of rock discontinuities from point clouds using the ISODATA clustering algorithm and deviation from mean elevation. Int. J. Rock Mech. Min. Sci. 2018, 110, 76–87. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Cao, T.; Xiao, A.; Wu, L.; Mao, L. Automatic fracture detection based on terrestrial laser scanning data: A new method and case study. Comput. Geosci. 2017, 106, 209–216. [Google Scholar] [CrossRef]
- Roncella, R.; Forlani, G. Extraction of planar patches from point clouds to retrieve dip and dip direction of rock discontinuities. In Proceedings of the ISPRS WG III/3, III/4, V/3 Workshop “Laser Scanning 2005”, Enschede, The Netherlands, 12–14 September 2005; pp. 162–167. [Google Scholar]
- Voyat, I.; Roncella, R.; Forlani, G.; Ferrero, A.M. Advanced techniques for geo structural surveys in modelling fractured rock masses: Application to two Alpine sites. In Proceedings of the Golden Rocks 2006, the 41st US Symposium on Rock Mechanics (USRMS), American Rock Mechanics Association, Golden, CO, USA, 17–21 June 2006. [Google Scholar]
- Ferrero, A.M.; Forlani, G.; Roncella, R.; Voyat, H.I. Advanced geostructural survey methods applied to rock mass characterization. Rock. Mech. Rock. Eng. 2009, 42, 631–665. [Google Scholar] [CrossRef]
- Lato, M.; Diederichs, M.S.; Hutchinson, D.J.; Harrap, R. Optimisation of LiDAR scanning and processing for automated structural evaluation of discontinuities in rockmasses. Int. J. Rock Mech. Min. Sci. 2009, 46, 194–199. [Google Scholar] [CrossRef]
- Slob, S.; Hack, R. 3D terrestrial laser scanning as a new field measurement and monitoring technique. In Engineering Geology for Infrastructure Planning in Europe. Lecture Notes in Earth Sciences; Springer: Berlin/Heidelberg, Germany, 2004; pp. 179–189. [Google Scholar]
- García-Sellés, D.; Falivene, O.; Arbués, P.; Gratacos, O.; Tavani, S.; Muñoz, J.A. Supervised identification and reconstruction of near-planar geological surfaces from terrestrial laser scanning. Comput. Geosci. 2011, 37, 1584–1594. [Google Scholar] [CrossRef]
- Gigli, G.; Casagli, N. Extraction of rock mass structural data from high resolution laser scanning products. In Landslide Science and Practice: Spatial Analysis and Modelling; Springer: Berlin/Heidelberg, Germany, 2013; pp. 89–94. [Google Scholar]
- Van Knapen, B.; Slob, S. Identification and characterization of rock mass discontinuity sets using 3D laser scanning. Procedia Eng. 2006, 191, 838–845. [Google Scholar]
- Weidner, L.; Walton, G.; Kromer, R. Classification methods for point clouds in rock slope monitoring: A novel machine learning approach and comparative analysis. Eng. Geol. 2019, 263, 105326. [Google Scholar] [CrossRef]
- Hoek, E.; Bray, J.W. Rock Slope Engineering, 3rd ed.; The Institution of Mining and Metallurgy: London, UK, 1981; pp. 341–351. [Google Scholar]
- Priest, S.D. Discontinuity Analysis for Rock Engineering; Chapman and Hall: London, UK, 1993. [Google Scholar]
- Olariu, M.I.; Ferguson, J.F.; Aiken, C.L.V.; Xu, X. Outcrop fracture characterization using terrestrial laser scanners: Deep-water Jackfork sandstone at big rock quarry. Ark. Geosphere 2008, 4, 247–259. [Google Scholar] [CrossRef]
- Abellán, A.; Vilaplana, J.M.; Martínez, J. Application of a long-range terrestrial laser scanner to a detailed rockfall study at Vall de Núria (Eastern Pyrenees, Spain). Eng. Geol. 2006, 88, 136–148. [Google Scholar] [CrossRef]
- García-Cortés, S.; Galán, C.O.; Argüelles-Fraga, R.; Díaz, A.M. Automatic detection of discontinuities from 3D point clouds for the stability analysis of jointed rock masses. In Proceedings of the 18th International Conference on Virtual Systems and Multimedia, VSMM 2012 Virtual Systems in the Information Society, Milan, Italy, 2–5 September 2012; pp. 595–598. [Google Scholar]
- Ge, Y.; Tang, H.; Xia, D.; Wang, L.; Zhao, B.; Teaway, J.W.; Chen, H.; Zhou, T. Automated measurements of discontinuity geometric properties from a 3D-point cloud based on a modified region growing algorithm. Eng. Geol. 2018, 242, 44–54. [Google Scholar] [CrossRef]
- Lai, P.; Samson, C.; Bose, P. Surface roughness of rock faces through the curvature of triangulated meshes. Comput. Geosci. 2014, 70, 229–237. [Google Scholar] [CrossRef]
- Priest, S.D.; Hudson, J.A. Estimation of discontinuity spacing and trace length using scan-line surveys. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1981, 18, 183–197. [Google Scholar] [CrossRef]
- Commission on The Standardization of Laboratory and Field Test (ISRM). Suggested methods for the quantitative description of discontinuities in rock masses. Int. J. Rock Mech. Min. Sci. Geomech. Abs. 1978, 15, 319–368. [Google Scholar]
- Slob, S.; van Knapen, B.; Hack, R.; Turner, K.; Kemeny, J. Method for automated discontinuity analysis of rock slopes with three-dimensional laser scanning. Transp. Res. Rec. 2005, 1913, 187–194. [Google Scholar] [CrossRef]
- Mah, J.; Samson, C.; McKinnon, S.D. 3D laser imaging for joint orientation analysis. Int. J. Rock Mech. Min. Sci. 2011, 48, 932–941. [Google Scholar] [CrossRef]
- Reid, T.R.; Harrison, J.P. A semi-automated methodology for discontinuity trace detection in digital images of rock mass exposures. Int. J. Rock Mech. Min. Sci. 2000, 37, 1073–1089. [Google Scholar] [CrossRef]
- Thiel, K.H.; Wehr, A. Performance capabilities of laser-scanners—An overview and measurement principle analysis. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 14–18. [Google Scholar]
- Vöge, M.; Lato, M.J.; Diederichs, M.S. Automated rockmass discontinuity mapping from 3-dimensional surface data. Eng. Geol. 2013, 164, 155–162. [Google Scholar] [CrossRef]
- Mavrouli, O.; Corominas, J.; Jaboyedoff, M. Size distribution for potentially unstable rock masses and in situ rock blocks using LIDAR-generated digital elevation models. Rock Mech. Rock Eng. 2015, 48, 1589–1604. [Google Scholar] [CrossRef] [Green Version]
- Battulwar, R.; Emami, E.; Zare Naghadehi, M.; Sattarvand, J. Automatic extraction of joint orientations in rock mass using PointNet and DBSCAN. In Proceedings of the International Symposium on Visual Computing, San Diego, CA, USA, 5–7 October 2020; Springer: Cham, Switzerland, 2020; pp. 1–10. [Google Scholar]
- Casagli, N.; Pini, G. Analisi cinematica della stabilità in versanti naturali e fronti di scavo in roccia. Geol. Appl. Idrogeol. 1993, 28, 223–232. [Google Scholar]
- Sturzenegger, M.; Stead, D. Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat. Hazards Earth Syst. Sci. 2009, 9, 267–287. [Google Scholar] [CrossRef]
- Goodman, R.E.; Bray, J.W. Toppling of rock slopes. Proc. Spec. Conf. Rock Eng. Found. Slopes. 1976, 2, 201–234. [Google Scholar]
- Farina, P.; Bardi, F.; Lombardi, L.; Gigli, G. Combining structural data with monitoring data in open pit mines to interpret the failure mechanism and calibrate radar alarms. In Proceedings of the 2020 International Symposium on Slope Stability in Open Pit Mining and Civil Engineering; Dight, P., Ed.; Australian Centre for Geomechanics: Perth, Australia, 2020; pp. 523–534. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson surface reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, Goslar, Germany, 26–28 June 2006; pp. 61–70. [Google Scholar]
- Castagnetti, C.; Bertacchini, E.; Capra, A.; Dubbini, A. Terrestrial laser scanning for preserving cultural heritage: Analysis of geometric anomalies for ancient structures. In Proceedings of the FIG Working Week 2012—Knowing to Manage the Territory, Protect the Environment, Evaluate the Cultural Heritage, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Chías, P.; Abad, T.; Echeverría, E.; De Miguel, M.; Llorente, P. Underground surveying: 16th-century cellar vaults in the Gallería de Convalecienties, monastery of San Lorenzo del Ecorial. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Nafplio, Greece, 1–3 March 2017; Volume XLII2/W3, pp. 179–186. [Google Scholar] [CrossRef] [Green Version]
- Grussenmeyer, P.; Alby, E.; Landes, T.; Koehl, M.; Guillemin, S.; Hullo, J.F.; Assali, P.; Smigiel, E. Recording approach of heritage sites based on merging point clouds from high resolution photogrammetry and terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIXB5, 553–558. [Google Scholar] [CrossRef] [Green Version]
- Olsen, M.; Kuester, M.; Chang, B.; Hutchinson, T. Terrestrial laser scanning-base structural damage assessment. J. Comput. Civ. Eng. 2010, 24, 264–272. [Google Scholar] [CrossRef]
- Assali, P.; Grussenmeyer, P.; Villemin, T.; Pollet, N.; Viguier, F. Surveying and modeling of rock discontinuities by terrestrial laser scanning and photogrammetry: Semi-automatic approaches for linear outcrop inspection. J. Struct. Geol. 2014, 66, 102–114. [Google Scholar] [CrossRef]
- Gigli, G.; Mugnai, F.; Leoni, L.; Casagli, N. Brief communication “Analysis of deformations in historic urban areas using terrestrial laser scanning”. Nat. Hazards Earth Syst. Sci. 2014, 9, 1759–1761. [Google Scholar] [CrossRef]
- Xin, W.; Lejun, Z.; Xiaohua, S.; Yupeng, R.; Yi, Q. A region-growing approach for automatic outcrop fracture extraction from a three-dimensional point cloud. Comput. Geosci. 2017, 99, 100–106. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Measurement Range | 0.2–1000 m |
| Accuracy | 10 mm |
| Laser class | 1 |
| Minimum angle step width | 0.004° |
| Scan-Line Survey | Remote |
|---|---|
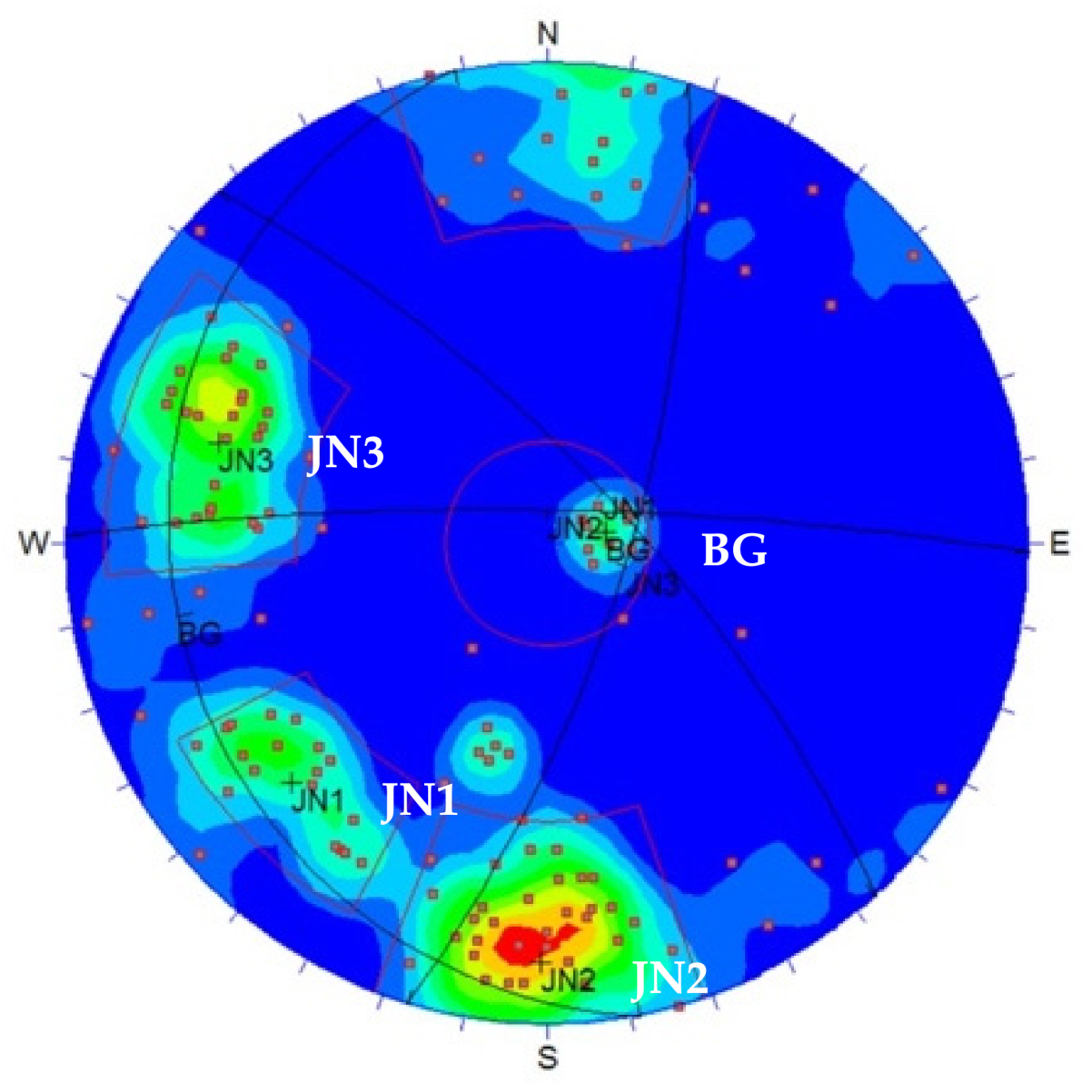
| JN1 059/78° | JN1: 65°/76° |
| JN2 002/87° | JN2: 001°/82° |
| JN3 115/75° | JN3: 121°/75° |
| BG 250/09° | BG: 245°/13° |
| Instability Mechanism | Hazard Index |
|---|---|
| Planar failure | |
| Wedge failure | |
| Flexural toppling | |
| Block toppling |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mugnai, F.; Farina, P.; Tucci, G. Exploiting a Semi-Automatic Point Cloud Segmentation Method to Improve the Quality of Rock-Mass Characterization. The Cima Grappa Conservative Restoration Case Study. ISPRS Int. J. Geo-Inf. 2021, 10, 276. https://doi.org/10.3390/ijgi10050276
Mugnai F, Farina P, Tucci G. Exploiting a Semi-Automatic Point Cloud Segmentation Method to Improve the Quality of Rock-Mass Characterization. The Cima Grappa Conservative Restoration Case Study. ISPRS International Journal of Geo-Information. 2021; 10(5):276. https://doi.org/10.3390/ijgi10050276
Chicago/Turabian StyleMugnai, Francesco, Paolo Farina, and Grazia Tucci. 2021. "Exploiting a Semi-Automatic Point Cloud Segmentation Method to Improve the Quality of Rock-Mass Characterization. The Cima Grappa Conservative Restoration Case Study" ISPRS International Journal of Geo-Information 10, no. 5: 276. https://doi.org/10.3390/ijgi10050276
APA StyleMugnai, F., Farina, P., & Tucci, G. (2021). Exploiting a Semi-Automatic Point Cloud Segmentation Method to Improve the Quality of Rock-Mass Characterization. The Cima Grappa Conservative Restoration Case Study. ISPRS International Journal of Geo-Information, 10(5), 276. https://doi.org/10.3390/ijgi10050276