
INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings

Abstract
:1. Introduction
2. Methods
2.1. INS Solution
2.1.1. Inertial Navigation Observation Model
2.1.2. Position Calculation by Using INS Observations
2.2. ANFIS and Its Structure
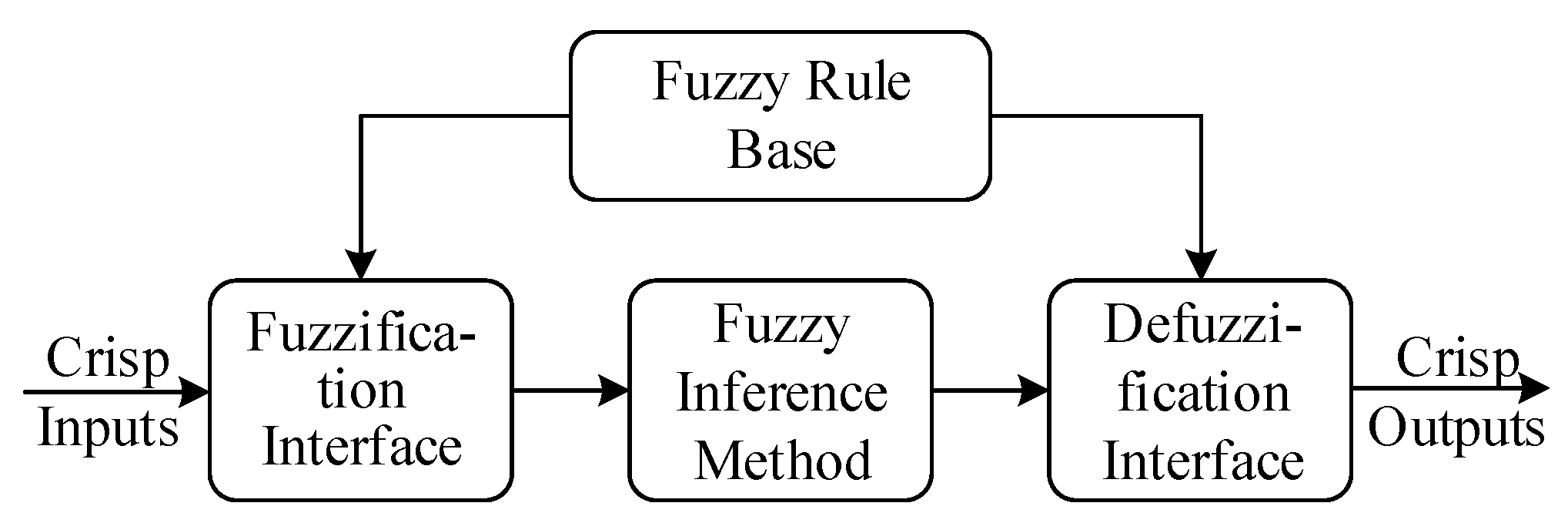
2.2.1. Fuzzy Inference System
2.2.2. Artificial Neural Networks
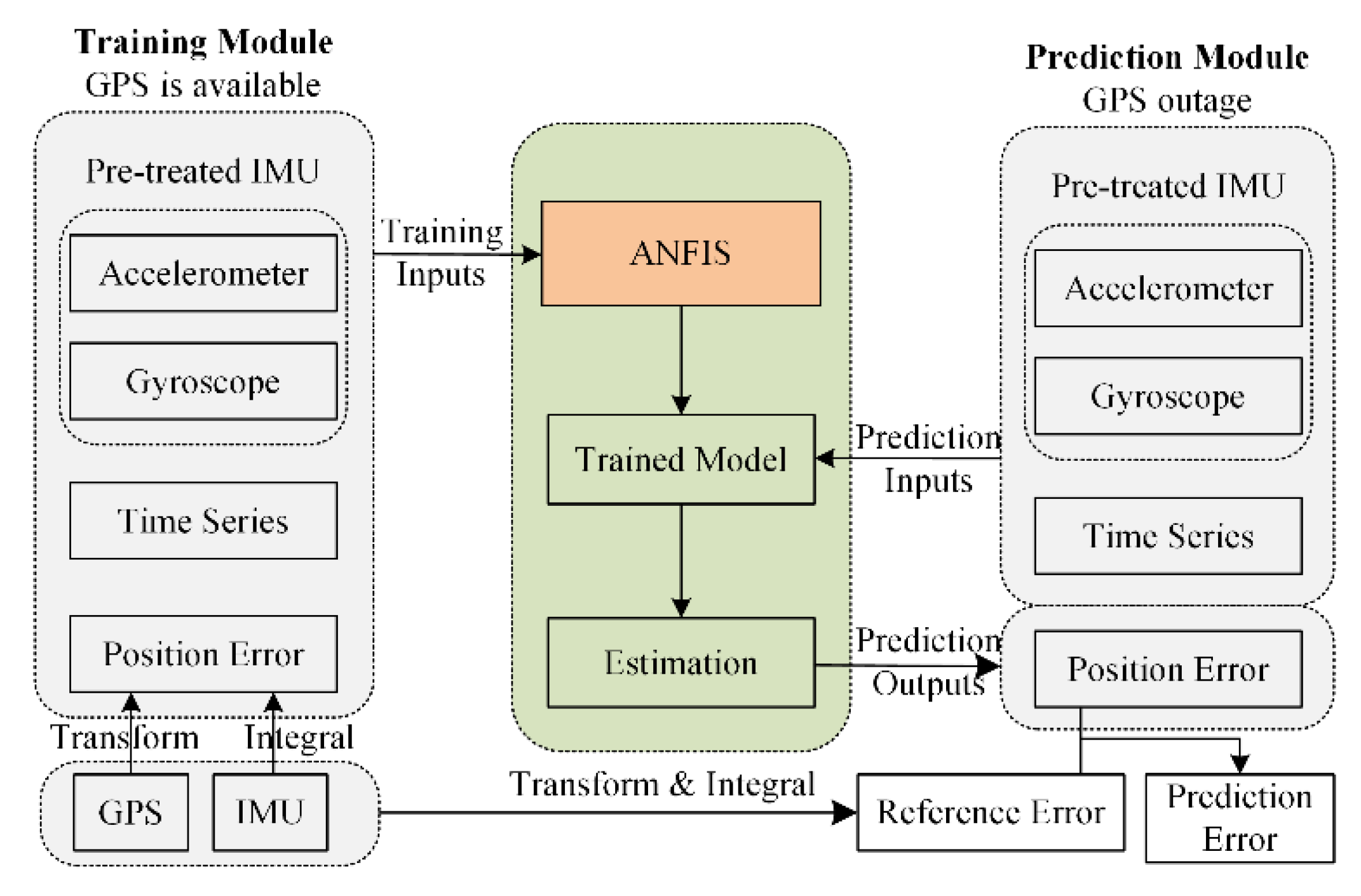
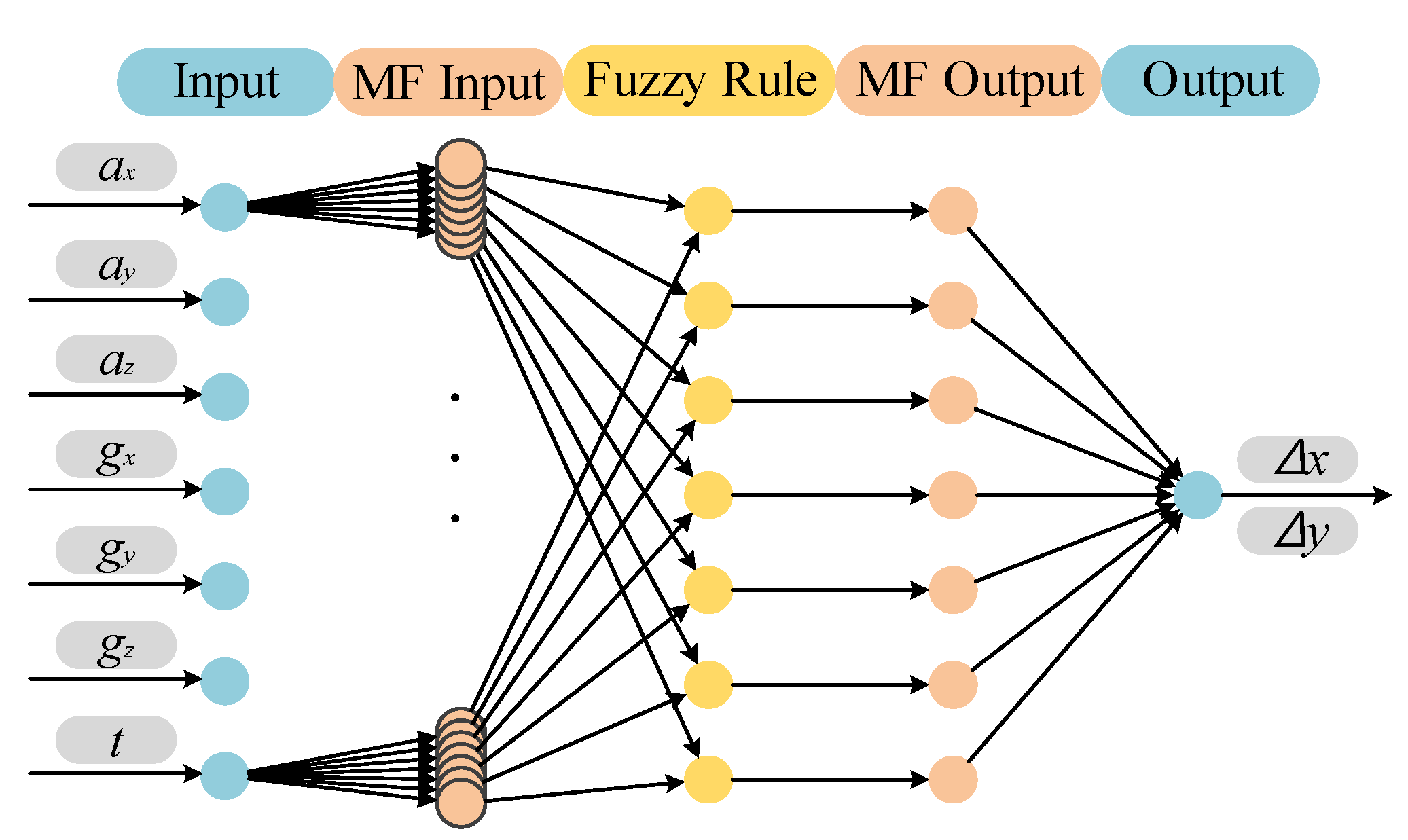
2.2.3. Estimation of the Accumulative Error in the Position of INS Based on an ANFIS
3. Experiments and Results
3.1. Introduction to KITTI
3.2. Process and Result Analysis
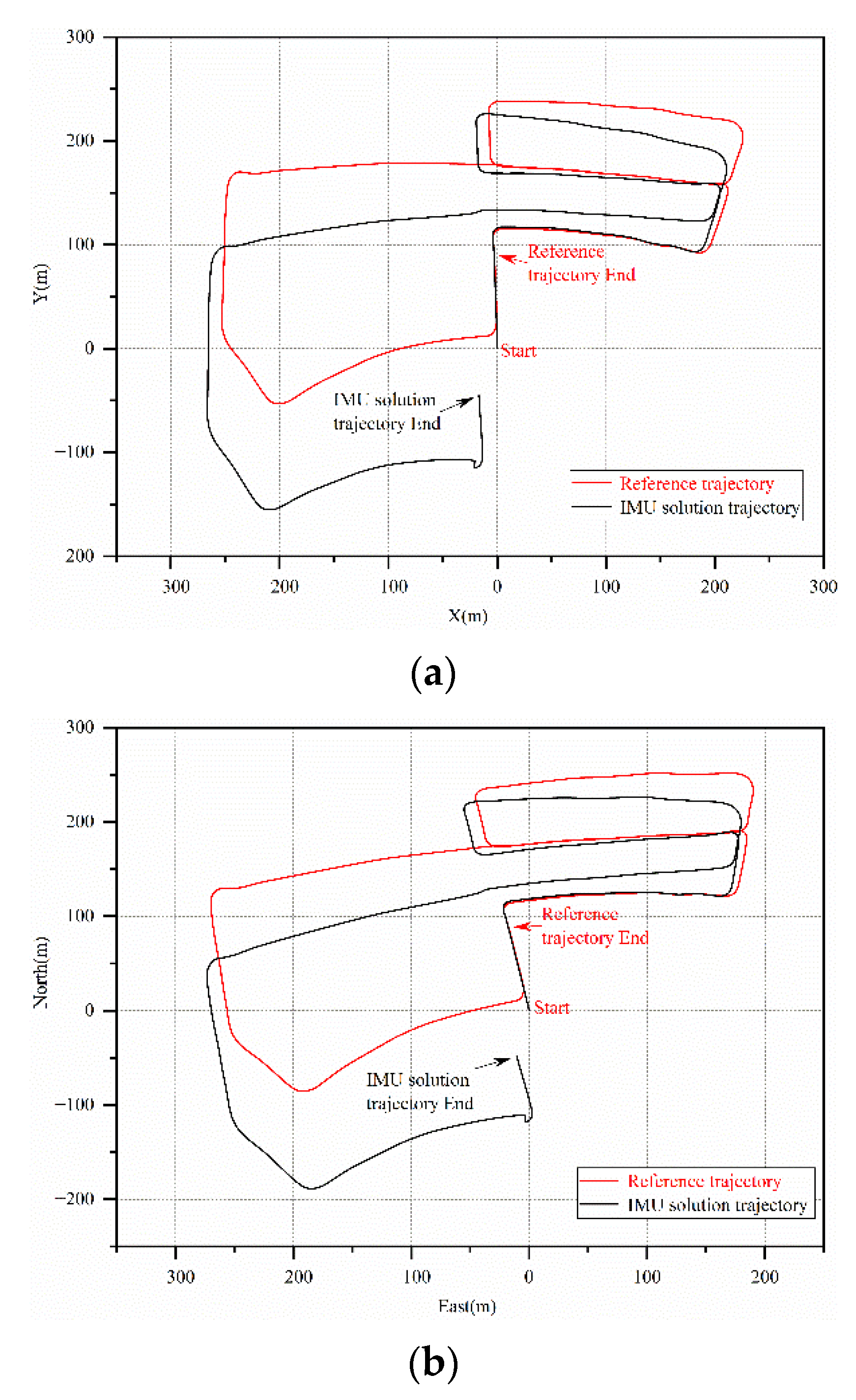
3.2.1. Single-Sequence Position Error Estimation Model
3.2.2. Multi-Sequences Position Error Estimation Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Franz, M.O.; Mallot, H.A. Biomimetic robot navigation. Robot. Auton. Syst. 2000, 30, 133–153. [Google Scholar] [CrossRef] [Green Version]
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Leung, K.T.; Whidborne, J.F.; Purdy, D.; Dunoyer, A. A review of ground vehicle dynamic state estimations utilising GPS/INS. Veh. Syst. Dyn. 2011, 49, 29–58. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Shaukat, A.; Blacker, P.; Spiteri, C.; Gao, Y. Towards Camera-LIDAR Fusion-Based Terrain Modelling for Planetary Surfaces: Review and Analysis. Sensors 2016, 16, 1952. [Google Scholar] [CrossRef] [Green Version]
- Sharaf, R.; Noureldin, A.; Osman, A.; El-Sheimy, N. Online INS/GPS integration with a radial basis function neural network. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 8–14. [Google Scholar] [CrossRef]
- Noureldin, A.; El-Shafie, A.; Bayoumi, M. GPS/INS integration utilizing dynamic neural networks for vehicular navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- El Shafie, A.; Hussain, A.; Eldin, A.E.N. ANFIS-Based Model for Real-time INS/GPS Data Fusion for Vehicular Navigation System. In Proceedings of the 2009 International Conference on Computer Technology and Development, Kota Kinabalu, Malaysia, 13–15 November 2009; Volume 2. [Google Scholar]
- Du, S.; Gan, X.; Zhang, R.; Zhou, Z. The Integration of Rotary MEMS INS and GNSS with Artificial Neural Networks. Math. Probl. Eng. 2021, 2021. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S. Learning wheel odometry and IMU errors for localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Chen, D.; Han, J.Q. Application of wavelet neural network in signal processing of MEMS accelerometers. Microsyst. Technol. 2011, 17, 1–5. [Google Scholar] [CrossRef]
- Jiang, C.H.; Chen, S.; Chen, Y.W.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU de-noising method using long short-term memory recurrent neural networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Ben, Y.; Sun, F. Strapdown fiber optic gyrocompass using adaptive network-based fuzzy inference system. Opt. Eng. 2014, 53, 014103. [Google Scholar] [CrossRef]
- Kaygisiz, B.H.; Erkmen, I.; Erkmen, A.M. GPS/INS Enhancement for Land Navigation using Neural Network. J. Navig. 2004, 57, 297–310. [Google Scholar] [CrossRef]
- Srinivasan, S.; Sa, I.; Zyner, A.; Reijgwart, V.; Siegwart, R. End-to-end velocity estimation for autonomous racing. IEEE Robot. Autom. Lett. 2020, 5, 6869–6875. [Google Scholar] [CrossRef]
- Lima, J.P.S.D.; Uchiyama, H.; Taniguchi, R. End-to-End Learning Framework for IMU-Based 6-DOF Odometry. Sensors 2019, 19, 3777. [Google Scholar] [CrossRef] [Green Version]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU Dead-Reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Yan, H.; Shan, Q.; Furukawa, Y. RIDI: Robust IMU double integration. In Proceedings of the 15th European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Chen, X.; Shen, C.; Zhang, W.; Tomizuka, M.; Xu, Y.; Chiu, K. Novel hybrid of strong tracking Kalman filter and wavelet neural network for GPS/INS during GPS outages. Measurement 2013, 46, 3847–3854. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, Y.; Gao, Y. Model predictive filter based neural networks for INS/GPS integrated navigation during GPS outages. In Proceedings of the 2017 IEEE 7th International Conference on Electronics Information and Emergency Communication (ICEIEC), Macau, China, 21–23 July 2017. [Google Scholar]
- Adusumilli, S.; Bhatt, D.; Wang, H.; Bhattacharya, P.; Devabhaktuni, V. A low-cost INS/GPS integration methodology based on random forest regression. Expert Syst. Appl. 2013, 40, 4653–4659. [Google Scholar] [CrossRef]
- Jaradat, M.A.; Abdel-Hafez, M.F.; Saadeddin, K.; Jarrah, M.A. Intelligent fault detection and fusion for INS/GPS navigation system. In Proceedings of the 9th International Symposium on Mechatronics and its Applications (ISMA), Amman, Jordan, 9–11 April 2013. [Google Scholar]
- Grigorie, L.T.; Jula, N.; Corcau, C.L.; Adochiei, I.R.; Larco, C.; Mustaţă, S.M. A positioning mechanism based on MEMS-INS/GPS and ANFIS data fusion for urban life mobility improvement. In Proceedings of the 4th International Conference on Nanotechnologies and Biomedical Engineering (ICNBME), Chisinau, Moldova, 18–21 September 2019. [Google Scholar]
- Abdel-Hamid, W.; Noureldin, A.; El-Sheimy, N. Adaptive fuzzy prediction of low-cost inertial-based positioning errors. IEEE Trans. Fuzzy Syst. 2007, 15, 519–529. [Google Scholar] [CrossRef]
- Jaradat, M.A.K.; Abdel-Hafez, M.F. Enhanced, delay dependent, intelligent fusion for INS/GPS navigation system. IEEE Sens. J. 2014, 14, 1545–1554. [Google Scholar] [CrossRef]
- Saadeddin, K.; Abdel-Hafez, M.F.; Jaradat, M.A.; Jarrah, M.A. Optimization of intelligent approach for low-cost INS/GPS navigation system. J. Intell. Robot. Syst. 2014, 73, 325–348. [Google Scholar] [CrossRef]
- Abdolkarimi, E.S.; Mosavi, M.R. Wavelet-adaptive neural subtractive clustering fuzzy inference system to enhance low-cost and high-speed INS/GPS navigation system. GPS Solut. 2020, 24. [Google Scholar] [CrossRef]
- Saadeddin, K.; Abdel-Hafez, M.F.; Jaradat, M.A.; Jarrah, M.A. Performance enhancement of low-cost, high-accuracy, state estimation for vehicle collision prevention system using ANFIS. Mech. Syst. Signal Process. 2013, 41, 239–253. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, X.; Hu, D.; Li, T.; Lian, J. Strapdown inertial navigation system algorithms based on dual quaternions. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 110–132. [Google Scholar] [CrossRef]
- Stamou, G.B.; Tzafestas, S.G. Fuzzy relation equations and fuzzy inference systems: An inside approach. IEEE Trans. Syst. Man Cybernetics Part B Cybern. 1999, 29, 694–702. [Google Scholar] [CrossRef]
- Son, L.H.; Van Viet, P.; Van Hai, P. Picture inference system: A new fuzzy inference system on picture fuzzy set. Appl. Intell. 2017, 46, 652–669. [Google Scholar] [CrossRef]
- Schott, D.J.; Hoflinger, F.; Zhang, R.; Reindl, L.M.; Yang, H. Fuzzy inference system assisted inertial localization system. In Proceedings of the 2017 International Conference on Engineering, Technology and Innovation (ICE/ITMC), Madeira, Portugal, 27–29 June 2017. [Google Scholar]
- Wang, L.X. A Course in Fuzzy Systems and Control; Prentice-Hall: Hoboken, NJ, USA, 1997; pp. 90–149. ISBN 978-01-3540-882-7. [Google Scholar]
- Chung-Shi, T.; Bor-Sen, C.; Huey-Jian, U. Fuzzy tracking control design for nonlinear dynamic systems via T-S fuzzy model. IEEE Trans. Fuzzy Syst. 2001, 9, 381–392. [Google Scholar] [CrossRef] [Green Version]
- Basheer, I.A.; Hajmeer, M. Artificial neural networks: Fundamentals, computing, design, and application. J. Microbiol. Methods 2000, 43, 3–31. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Plumb, A.P.; Rowe, R.C.; York, P.; Brown, M. Optimisation of the predictive ability of artificial neural network (ANN) models: A comparison of three ANN programs and four classes of training algorithm. Eur. J. Pharm. Sci. 2005, 25, 395–405. [Google Scholar] [CrossRef]
- Che, Z.; Chiang, T.; Che, Z. Feed-forward neural networks training: A comparison between genetic algorithm and back-propagation learning algorithm. Int. J. Innov. Comput. Inf. Control. 2011, 7, 5839–5850. [Google Scholar] [CrossRef]
- Zhang, Y.; Mu, B.; Zheng, H. Link Between and Comparison and Combination of Zhang Neural Network and Quasi-Newton BFGS Method for Time-Varying Quadratic Minimization. IEEE Trans. Cybern. 2013, 43, 490–503. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Zhang, L.; Song, Y. The Learning Effect of Different Hidden Layers Stacked Autoencoder. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 11–12 September 2016; Volume 2. [Google Scholar]
- Mirchandani, G.; Cao, W. On hidden nodes for neural nets. IEEE Trans. Circuits Syst. 1989, 36, 661–664. [Google Scholar] [CrossRef]
- Wanas, N.; Auda, G.; Kamel, M.S.; Karray, F.A.K.F. On the optimal number of hidden nodes in a neural network. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering (Cat. No.98TH8341), Waterloo, ON, Canada, 25–28 May 1998; Volume 1–2. [Google Scholar]
- Kuo, R.J.; Chen, C.H.; Hwang, Y.C. An intelligent stock trading decision support system through integration of genetic algorithm based fuzzy neural network and artificial neural network. Fuzzy Sets Syst. 2001, 118, 21–45. [Google Scholar] [CrossRef]
- Pradhan, B. A comparative study on the predictive ability of the decision tree, support vector machine and neuro-fuzzy models in landslide susceptibility mapping using GIS. Comput. Geosci. 2013, 51, 350–365. [Google Scholar] [CrossRef]
- Nayak, P.C.; Sudheer, K.P.; Rangan, D.M.; Ramasastri, K.S. A neuro-fuzzy computing technique for modeling hydrological time series. J. Hydrol. 2004, 291, 52–66. [Google Scholar] [CrossRef]
- Suganthi, L.; Iniyan, S.; Samuel, A.A. Applications of fuzzy logic in renewable energy systems—A review. Renew. Sustain. Energy Rev. 2015, 48, 585–607. [Google Scholar] [CrossRef]
- Jang, R.J. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Lohani, A.K.; Goel, N.K.; Bhatia, K.K.S. Takagi–Sugeno fuzzy inference system for modeling stage–discharge relationship. J. Hydrol. 2006, 331, 146–160. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, M.; Chen, Y.; Li, M. IMU data processing for inertial aided navigation: A recurrent neural network based approach. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xian, China, 31 May–5 June 2021. [Google Scholar]
- Podobnik, J.; Kraljic, D.; Zadravec, M.; Munih, M. Centre of pressure estimation during walking using only inertial-measurement units and end-to-end statistical modelling. Sensors 2020, 20, 6136. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Farrell, J.A.; Barth, M. The Global Positioning System and Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999; pp. 21–28. ISBN 007022045X. [Google Scholar]
- MathWorks. 3-D Coordinate and Vector Transformations—Functions. 2021. Available online: https://www.mathworks.com/help/map/referencelist.html?type=function&category=3-d-coordinate-and-vector-transformations&s_tid=CRUX_topnav (accessed on 26 May 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Unit | LIF | Remarks |
|---|---|---|---|
| Latitude | deg | 1 | WGS-84 |
| Longitude | deg | 2 | |
| Altitude | m | 3 | |
| Roll | rad | 4 | (−π–π) |
| Pitch | rad | 5 | (−1/2π–1/2π) |
| Yaw | rad | 6 | (−π–π) |
| Forward acceleration | m/s2 | 12 | b system |
| Leftward acceleration | m/s2 | 13 | |
| Upward acceleration | m/s2 | 14 | |
| Time stamp | s | / | timestamp.txt |
| LSTM | ANFIS | |||||||
|---|---|---|---|---|---|---|---|---|
| Direction | X | Y | East | North | X | Y | East | North |
| MSE | 0.00045 | 3.9 | 0.09 | 2.9 | 0.0017 | 0.0079 | 0.0039 | 0.0088 |
| RMSE | 0.02 | 1.97 | 0.30 | 1.70 | 0.04 | 0.09 | 0.06 | 0.09 |
| IMU Solution | ANN | LSTM | ANFIS | |||||
|---|---|---|---|---|---|---|---|---|
| X | Y | X | Y | X | Y | X | Y | |
| MSE | 4.46 | 3351.00 | 100.15 | 345.45 | 25.19 | 109.86 | 1.90 | 16.85 |
| RMSE | 2.11 | 57.89 | 10.01 | 18.59 | 5.02 | 10.48 | 1.38 | 4.11 |
| Accumulative Error | 9.83% | 3.59% | 1.77% | 0.45% | ||||
| Distance | 1052.9 m | |||||||
| IMU Solution | ANN | LSTM | ANFIS | |||||
|---|---|---|---|---|---|---|---|---|
| East | North | East | North | East | North | East | North | |
| MSE | 113.67 | 3280.96 | 145.43 | 529.14 | 155.43 | 62.23 | 1.71 | 13.16 |
| RMSE | 10.66 | 57.28 | 12.06 | 23.00 | 12.47 | 7.89 | 1.31 | 3.63 |
| Accumulative Error | 9.83% | 5.34% | 2.33% | 0.43% | ||||
| Distance | 1052.9 m | |||||||
| Sequence | Driving Time/s | Driving Distance/m | Accumulative Error |
|---|---|---|---|
| 09300018 | 260.29 | 1925.87 | 7.04% |
| 09300033 | 154.07 | 1623.47 | 4.14% |
| 09300034 | 127.53 | 919.89 | 3.84% |
| IMU Solution | ANFIS | |||
|---|---|---|---|---|
| X | Y | X | Y | |
| MSE | 288.33 | 865.53 | 54.25 | 143.41 |
| RMSE | 16.98 | 29.42 | 7.37 | 11.98 |
| Accumulative Error | 4.14% | 0.61% | ||
| Distance | 1623.47 m | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Y.; Li, H.; Wu, S.; Zhang, K. INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings. ISPRS Int. J. Geo-Inf. 2021, 10, 388. https://doi.org/10.3390/ijgi10060388
Duan Y, Li H, Wu S, Zhang K. INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings. ISPRS International Journal of Geo-Information. 2021; 10(6):388. https://doi.org/10.3390/ijgi10060388
Chicago/Turabian StyleDuan, Yabo, Huaizhan Li, Suqin Wu, and Kefei Zhang. 2021. "INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings" ISPRS International Journal of Geo-Information 10, no. 6: 388. https://doi.org/10.3390/ijgi10060388
APA StyleDuan, Y., Li, H., Wu, S., & Zhang, K. (2021). INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings. ISPRS International Journal of Geo-Information, 10(6), 388. https://doi.org/10.3390/ijgi10060388