




Generating Spatial Knowledge Graphs with 2D Indoor Floorplan Data: A Case Study on the Jeonju Express Bus Terminal

Abstract
:1. Introduction
- Designing a process to create 3D spatial information compliant with standard formats for representing building interiors and indoor routes using 2D spatial information so that an efficiency in data production can be expected.
- Enabling the use of 3D indoor spatial information as RDF data by developing a parser to generate data from the created 3D spatial information.
2. Theoretical Background
2.1. RDF
2.2. Indoor Spatial Data to RDF
2.3. Indoor Spatial Data Format
- The Indoor Mapping Data Format (IMDF) [38] was developed by Apple as an indoor mapping standard and is used in the Apple Map, ESRI, and other industrial fields. IMDF is primarily used for developing commercial navigation software within indoor spaces, making it advantageous for depicting attributes of large structures such as airports and shopping malls. The geometrical and attribute information is in a JSON-based format and was adopted as a standard by the Open Geospatial Consortium (OSM) in 2021.
- OSM indoor [39] can be seen more as a tagged schema in OSM rather than an independent data model, designed to represent indoor objects. It can depict individual spaces, doors, and hallways, and can be converted into the XML and GeoJSON formats. Through these details, users can navigate inside buildings and access indoor-specific information. The data, being open source, can be utilized by developers to create indoor navigation apps or enhance existing mapping solutions.
- CityGML [40], an open data model based on GML, is a data exchange standard for city and city features currently defined by ISO TC211. As a specialized application called Application Domain Extensions (ADEs), CityGML offers additional frameworks for urban modeling, excavating, water management, etc. CityGML possesses a concept of differentiating urban models based on accuracy, from LoD1-4, with LoD4 being capable of representing indoor objects. However, it does not explicitly represent indoor paths.
- IndoorGML [41] was developed by the OGC as a standard for representing indoor spatial models and functions as an exchange format. IndoorGML can represent attributes of individual indoor spaces, connections between spaces, and indoor Points of Interest (POI). It is characterized by its compatibility with BIM, CityGML, and various spatial information data.
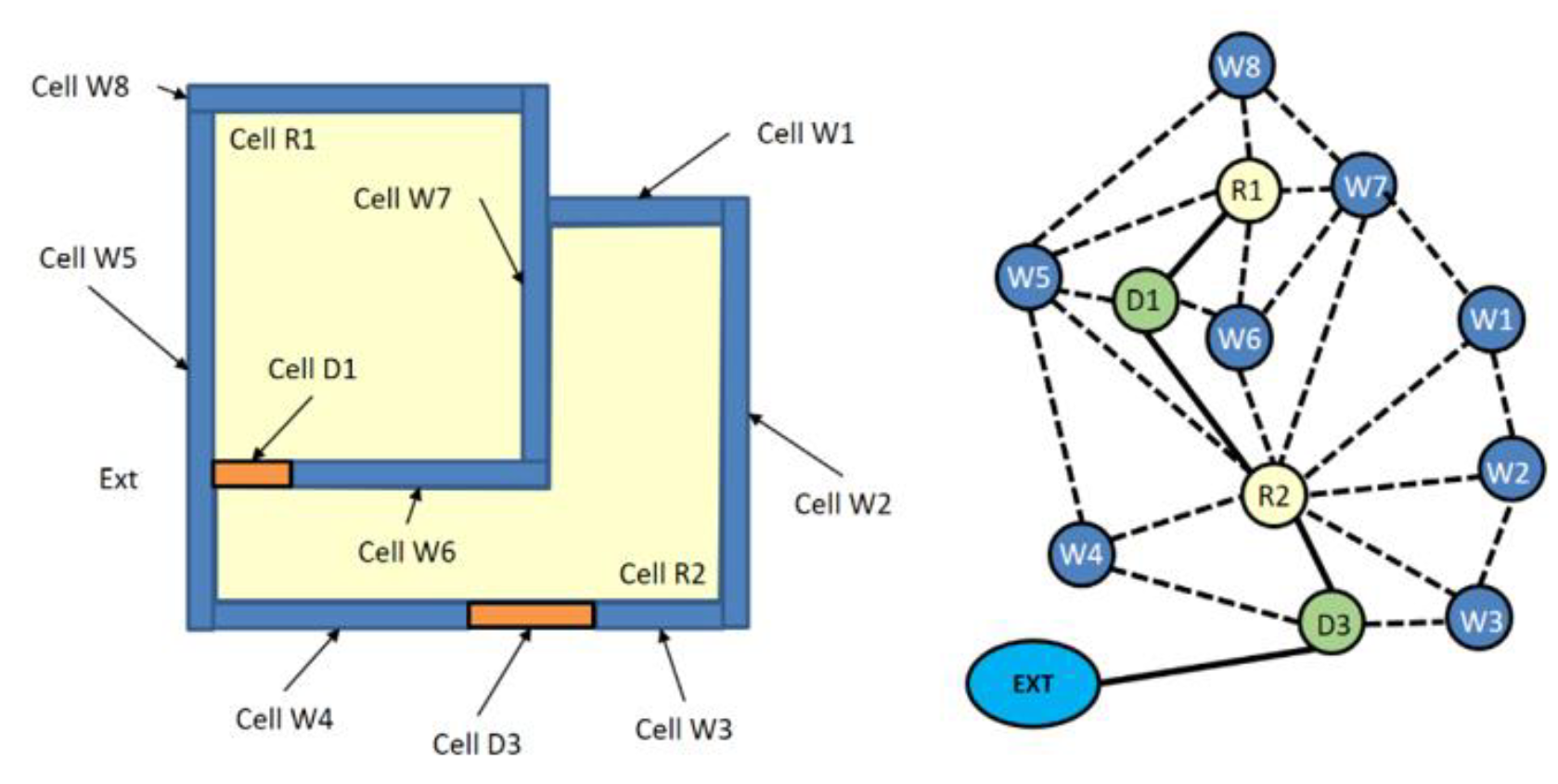
2.4. IndoorGML Schema
3. Methodology
3.1. Data
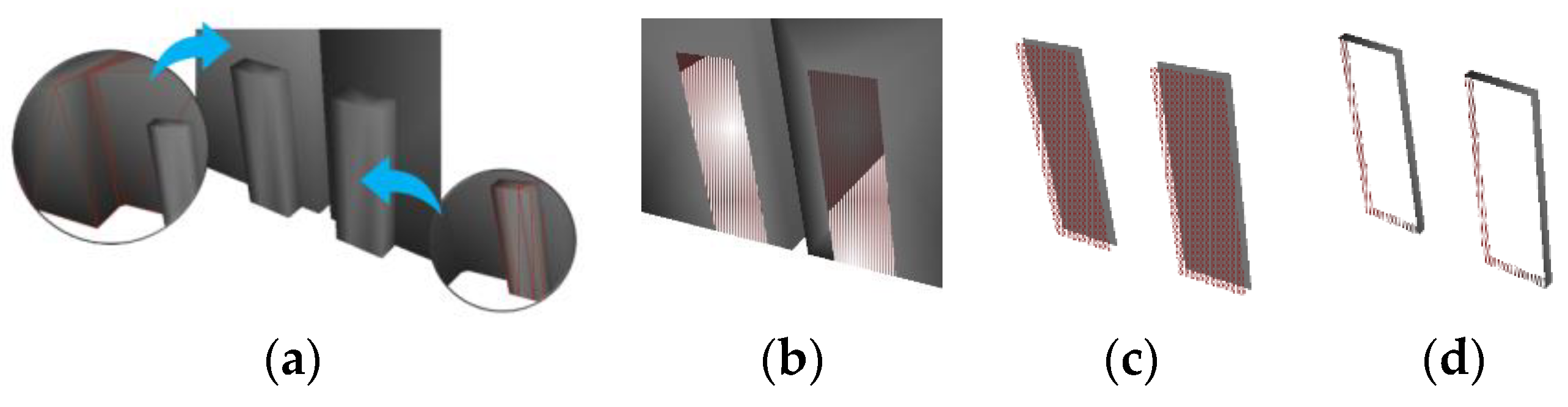
3.2. 3D Feature Generation
- PrimalSpaceFeature entities generation
- MultiLayeredGraph entities generation
3.3. IndoorGML to RDF
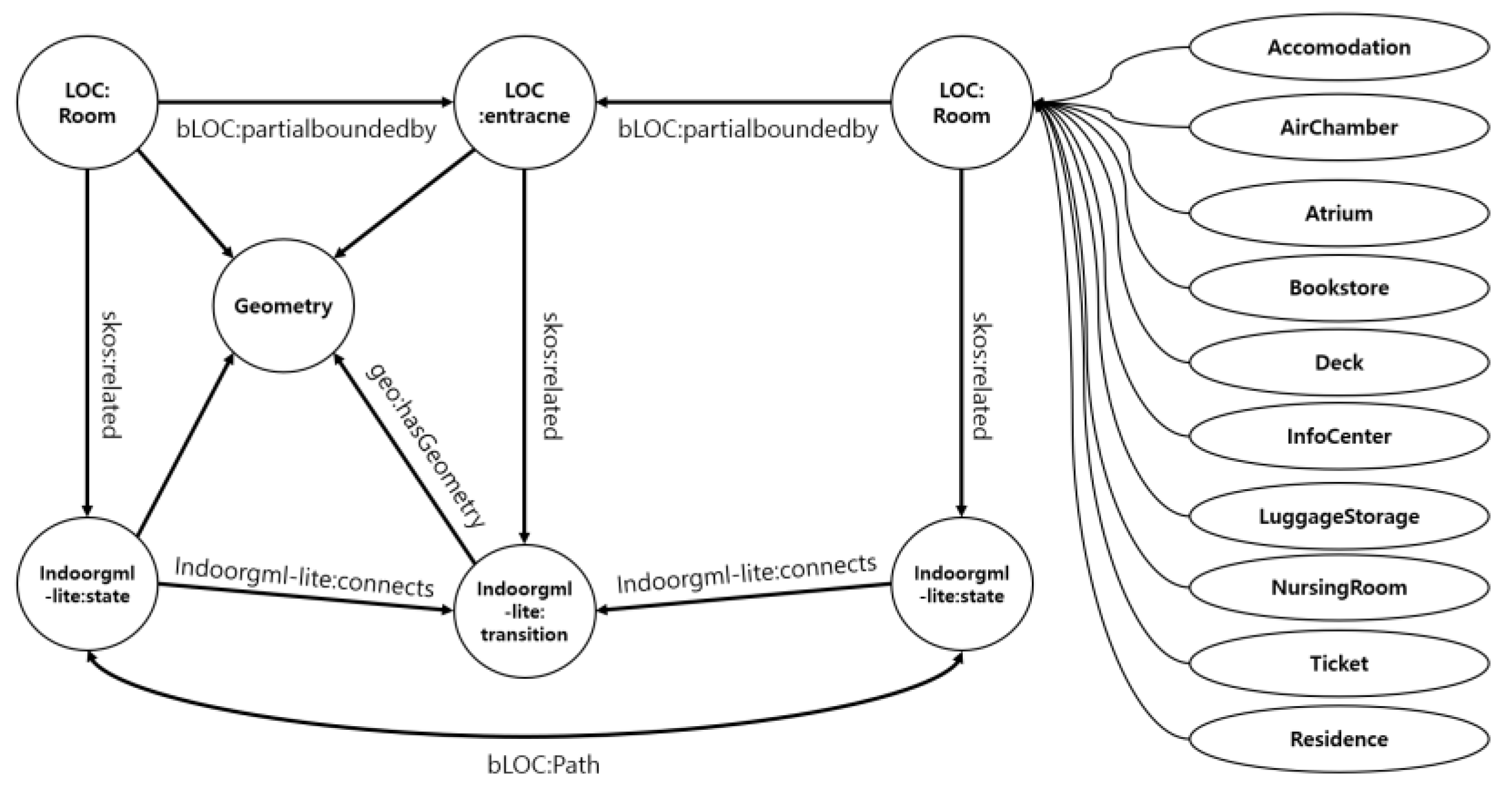
3.3.1. Schema Mapping
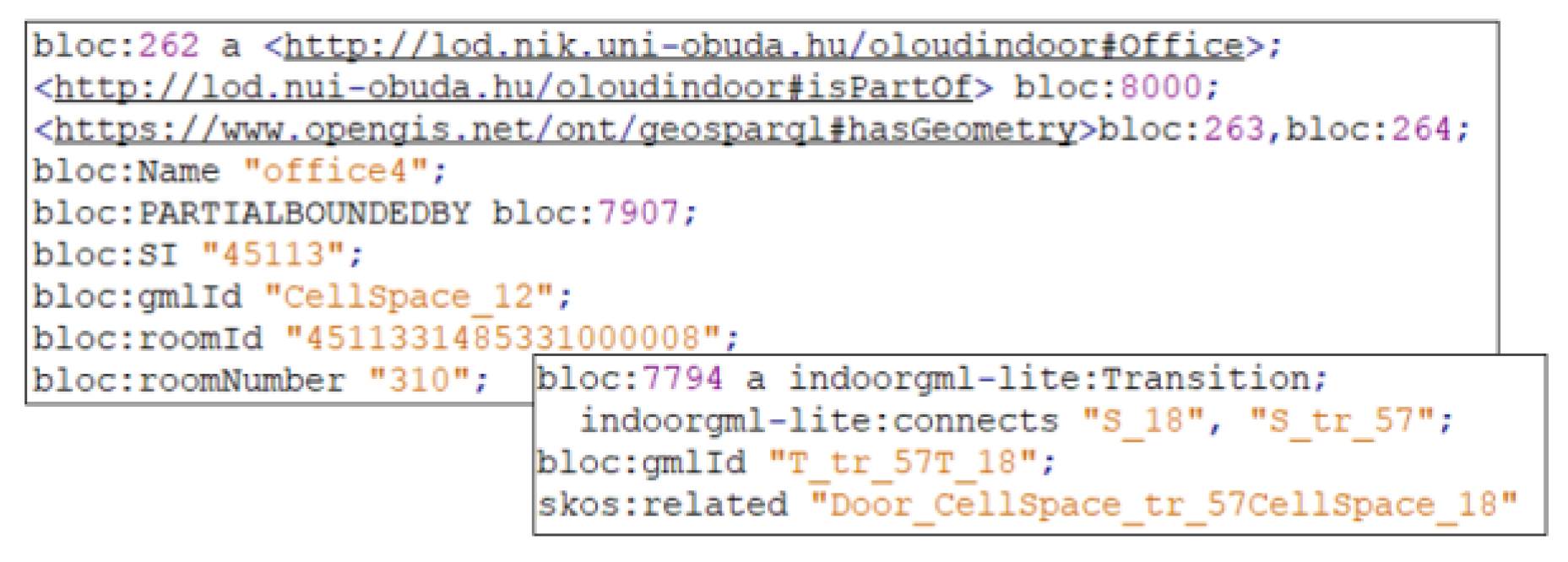
3.3.2. RDF Data Generation
4. Data Generation and Result
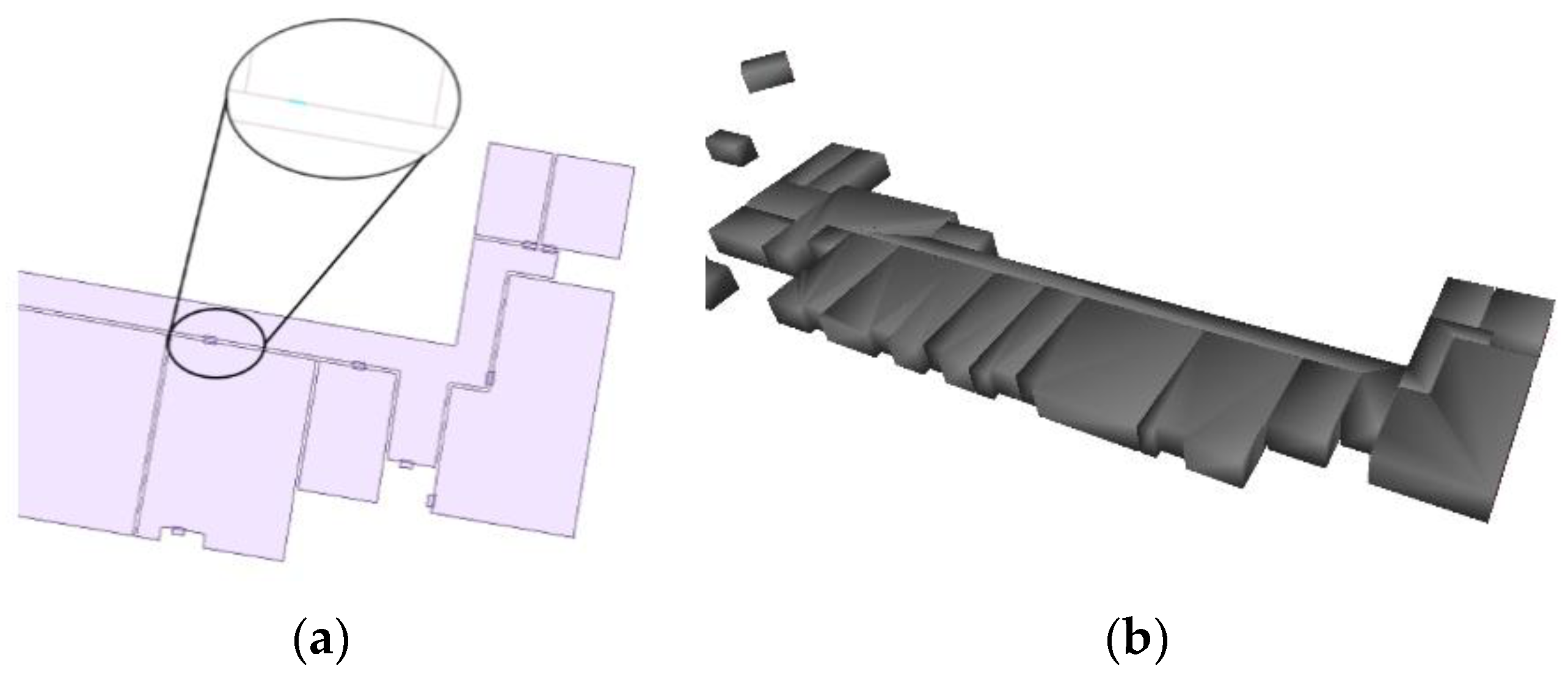
4.1. 3D Object Generation from 2D Shapefile
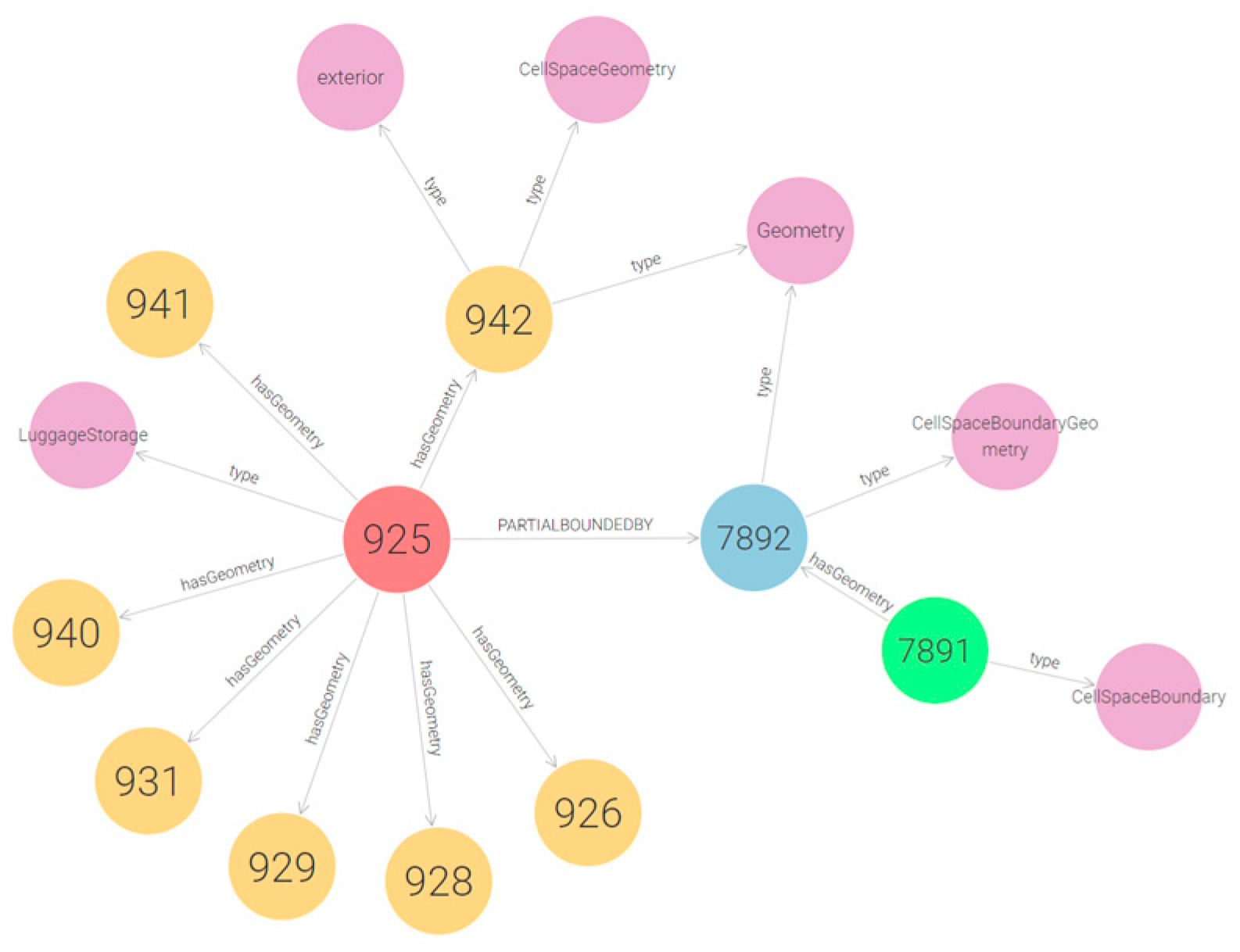
4.2. RDF Data Generation
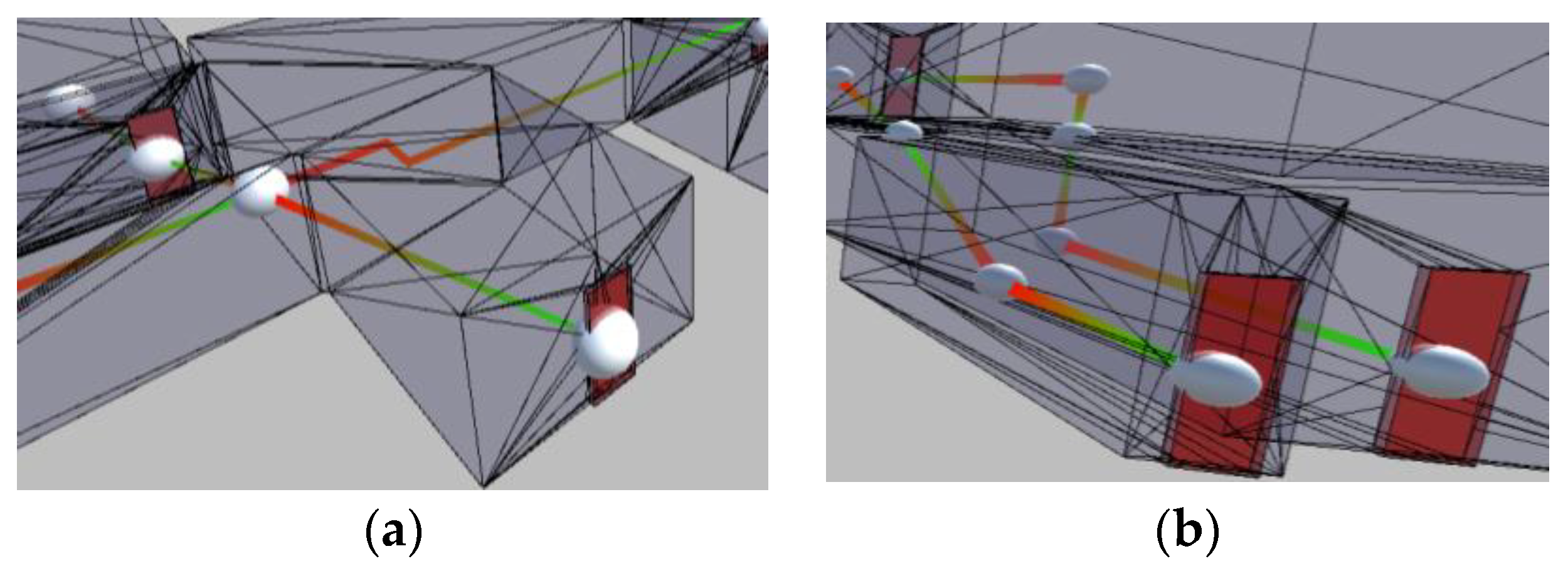
4.3. Visualization and Case Study
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bollacker, K.; Evans, C.; Paritosh, P.; Sturge, T.; Taylor, J. Freebase: A collaboratively created graph database for structuring human knowledge. In Proceedings of the 2008 ACM SIGMOD International Conference on Management of Data, Vancouver, BC, Canada, 9–12 June 2008; pp. 1247–1250. [Google Scholar]
- Vrandečić, D.; Krötzsch, M. Wikidata: A free collaborative knowledgebase. Commun. ACM 2014, 57, 78–85. [Google Scholar] [CrossRef]
- Suchanek, F.M.; Kasneci, G.; Weikum, G. Yago: A core of semantic knowledge. In Proceedings of the 16th International Conference on World Wide Web, Banff, AB, Canada, 8–12 May 2007; pp. 697–706. [Google Scholar]
- Shu, Y.; Yu, Z.; Li, Y.; Karlsson, B.F.; Ma, T.; Qu, Y.; Lin, C.Y. Tiara: Multi-grained retrieval for robust question answering over large knowledge bases. arXiv 2022, arXiv:2210.12925. [Google Scholar]
- Ye, X.; Yavuz, S.; Hashimoto, K.; Zhou, Y.; Xiong, C. Rng-kbqa: Generation augmented iterative ranking for knowledge base question answering. arXiv 2021, arXiv:2109.08678. [Google Scholar]
- Gu, Y.; Su, Y. Arcaneqa: Dynamic program induction and contextualized encoding for knowledge base question answering. arXiv 2022, arXiv:2204.08109. [Google Scholar]
- Chen, S.; Liu, Q.; Yu, Z.; Lin, C.Y.; Lou, J.G.; Jiang, F. ReTraCk: A flexible and efficient framework for knowledge base question answering. In Proceedings of the 59th Annual Meeting of the Association for Computational Linguistics and the 11th International Joint Conference on Natural Language Processing: System Demonstrations, Online, 1–6 August 2021; pp. 325–336. [Google Scholar]
- Zhou, J.; Xu, W. End-to-end learning of semantic role labeling using recurrent neural networks. In Proceedings of the 53rd Annual Meeting of the Association for Computational Linguistics and the 7th International Joint Conference on Natural Language Processing, Beijing, China, 26–31 July 2015; pp. 1127–1137. [Google Scholar]
- Apeh, M.M.; Abdul Rahman, A. A review of 3D spatial data models for surface and subsurface integration of spatial objects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 15–23. [Google Scholar] [CrossRef]
- Auer, S.; Lehmann, J.; Hellmann, S. Linkedgeodata: Adding a spatial dimension to the web of data. In The Semantic Web-ISWC 2009; Springer Berlin Heidelberg: Chantilly, VA, USA, 2009; pp. 731–746. [Google Scholar]
- Punjani, D.; Singh, K.; Both, A.; Koubarakis, M.; Angelidis, I.; Bereta, K.; Stamoulis, G. Template-based question answering over linked geospatial data. In Proceedings of the 12th Workshop on Geographic Information Retrieval, Seattle, WA, USA, 6 November 2018; pp. 1–10. [Google Scholar]
- Dsouza, A.; Tempelmeier, N.; Yu, R.; Gottschalk, S.; Demidova, E. Worldkg: A world-scale geographic knowledge graph. In Proceedings of the 30th ACM International Conference on Information & Knowledge Management, Virtual, 1–5 November 2021; pp. 4475–4484. [Google Scholar]
- Vinasco-Alvarez, D.; Samuel, J.S.; Servigne, S.; Gesquière, G. From Citygml to Owl. Ph.D. Thesis, École Centrale de Lyon, Ecully, France, 2020. [Google Scholar]
- Hamzei, E.; Tomko, M.; Winter, S. Translating place-related questions to GeoSPARQL queries. In Proceedings of the ACM Web Conference, Online, 25–29 April 2022; pp. 902–911. [Google Scholar]
- Homburg, T.; Staab, S.; Janke, D. Geosparql+: Syntax, semantics and system for integrated querying of graph, raster and vector data. In The Semantic Web–ISWC 2020; Springer International Publishing: Athens, Greece, 2020; pp. 258–275. [Google Scholar]
- Akroyd, J.; Mosbach, S.; Bhave, A.; Kraft, M. Universal Digital Twin-A Dynamic Knowledge Graph. Data-Centric Eng. 2021, 2, e14. [Google Scholar] [CrossRef]
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Silva, P.F.E. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef]
- Chen, L.; Nugent, C.D.; Wang, H. A knowledge-driven approach to activity recognition in smart homes. IEEE Trans. Knowl. Data Eng. 2011, 24, 961–974. [Google Scholar] [CrossRef]
- Fensel, A.; Tomic, S.; Kumar, V.; Stefanovic, M.; Aleshin, S.V.; Novikov, D.O. Sesame-s: Semantic smart home system for energy efficiency. Inform. Spektrum 2013, 36, 46–57. [Google Scholar] [CrossRef]
- Jang, H.; Yu, K.; Yang, J. Indoor reconstruction from floorplan images with a deep learning approach. ISPRS Int. J. Geo-Inf. 2020, 9, 65. [Google Scholar] [CrossRef]
- Teo, T.A.; Cho, K.H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Gunduz, M.; Isikdag, U.; Basaraner, M. A review of recent research in indoor modelling & mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 289–294. [Google Scholar]
- Kim, Y.J.; Kang, H.Y.; Lee, J. Development of indoor spatial data model using CityGML ADE. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 41–45. [Google Scholar] [CrossRef]
- Kang, H.K.; Li, K.J. A standard indoor spatial data model—OGC IndoorGML and implementation approaches. ISPRS Int. J. Geo-Inf. 2017, 6, 116. [Google Scholar] [CrossRef]
- Srivastava, S.; Maheshwari, N.; Rajan, K.S. Towards generating semantically-rich indoorgml data from architectural plans. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 591–595. [Google Scholar] [CrossRef]
- Mirvahabi, S.S.; Abbaspour, R.A. Automatic extraction of IndoorGML core model from OpenStreetMap. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 459–462. [Google Scholar] [CrossRef]
- Tessema, L.S.; Jäger, R.E.; Stilla, U. Extraction of IndoorGML Model from an Occupancy Grid Map Constructed Using 2D LiDAR. In Proceedings of the German Society for Photogrammetry, Remote Sensing and Geoinformation, Vienna, Austria, 20–22 February 2019. [Google Scholar]
- Berners-Lee, T. Linked Data-Design Issues. Available online: http://www.w3.org/DesignIssues/LinkedData.html (accessed on 12 October 2023).
- Battle, R.; Kolas, D. Geosparql: Enabling a geospatial semantic web. Semant. Web J. 2011, 3, 355–370. [Google Scholar] [CrossRef]
- Pauwels, P.; Van Deursen, D. IFC-to-RDF: Adaptation, aggregation and enrichment. In Proceedings of the First International Workshop on Linked Data in Architecture and Construction, Ghent, Belgium, 28–29 March 2012; pp. 1–3. [Google Scholar]
- Matuszka, T.; Gombos, G.; Kiss, A. A new approach for indoor navigation using semantic web technologies and augmented reality. In Proceedings of the Virtual Augmented and Mixed Reality Designing and Developing Augmented and Virtual Environments: 5th International Conference, VAMR 2013, Held as Part of HCI International 2013, Las Vegas, NV, USA, 21–26 July 2013; Proceedings, Part I 5. Springer: Berlin/Heidelberg, Germany, 2013; pp. 202–210. [Google Scholar]
- Fleiner, R.; Szász, B.; Piros, P. Indoor navigation Linked Data at Obuda University. In Proceedings of the 2016 IEEE 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 12–14 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 25–30. [Google Scholar]
- Simon-Nagy, G.; Fleiner, R. Ontology Extension for Personalized Accessible Indoor Navigation. In Proceedings of the 16th International Conference on Global Research and Education Inter-Academia, Iași, Romania, 25–28 September 2017; Springer: Cham, Switzerland, 2018; pp. 281–288. [Google Scholar]
- Chalhoub, N.; Simon-Nagy, G. Indoor Navigation Based on Linked Data at Honvéd Hospital, Budapest. In Proceedings of the 2018 IEEE 12th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 17–19 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Li, K.J.; Zlatanova, S.; Torres-Sospedra, J.; Pérez-Navarro, A.; Laoudias, C.; Moreira, A. Survey on indoor map standards and formats. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–8. [Google Scholar]
- Chen, J.; Clarke, K.C. Modeling standards and file formats for indoor mapping. In Proceedings of the International Conference on Geographical Information Systems Theory, Applications and Management, Online, 23–25 April 2017; SciTePress: Setúbal, Portugal, 2017; Volume 2, pp. 268–275. [Google Scholar]
- Yang, C.T.; Chen, S.T.; Den, W.; Wang, Y.T.; Kristiani, E. Implementation of an Intelligent Indoor Environmental Monitoring and Management System in Cloud. Future Gener. Comput. Syst. 2019, 96, 731–749. [Google Scholar] [CrossRef]
- IMDF. Available online: https://docs.ogc.org/cs/20-094/index.html (accessed on 15 October 2023).
- Goetz, M. Using crowdsourced indoor geodata for the creation of a three-dimensional indoor routing web application. Future Internet 2012, 4, 575–591. [Google Scholar] [CrossRef]
- CityGML. Available online: https://www.ogc.org/standard/citygml/ (accessed on 15 October 2023).
- IndoorGML. Available online: https://www.indoorgml.net/ (accessed on 15 October 2023).
- Deng, Y.; Ai, H.; Deng, Z.; Gao, W.; Shang, J. An Overview of Indoor Positioning and Mapping Technology Standards. Standards 2022, 2, 157–183. [Google Scholar] [CrossRef]
- Kyzirakos, K.; Savva, D.; Vlachopoulos, I.; Vasileiou, A.; Karalis, N.; Koubarakis, M.; Manegold, S. GeoTriples: Transforming Geospatial Data into RDF Graphs Using R2RML and RML Mappings. J. Web Semant. 2018, 52, 16–32. [Google Scholar] [CrossRef]
- Huang, C.Y.; Chiang, Y.H.; Tsai, F. An Ontology Integrating the Open Standards of City Models and Internet of Things for Smart-City Applications. IEEE Internet Things J. 2022, 9, 20444–20457. [Google Scholar] [CrossRef]
- Available online: https://www.w3.org/OWL/ (accessed on 17 October 2023).
- Ledoux, H.; Arroyo Ohori, K.; Kumar, K.; Dukai, B.; Labetski, A.; Vitalis, S. CityJSON: A Compact and Easy-to-Use Encoding of the CityGML Data Model. Open Geospat. Data Softw. Stand. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Available online: https://github.com/tudelft3d/indoorjson (accessed on 17 October 2023).
- Teo, T.A.; Yu, S.C. The extraction of indoor building information from BIM to OGC IndoorGML. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 167–170. [Google Scholar] [CrossRef]
- Adouane, K.; Stouffs, R.; Janssen, P.; Domer, B. A model-based approach to convert a building BIM-IFC data set model into CityGML. J. Spat. Sci. 2020, 65, 257–280. [Google Scholar] [CrossRef]
- Bast, H.; Brosi, P.; Kalmbach, J.; Lehmann, A. An Efficient RDF Converter and SPARQL Endpoint for the Complete OpenStreetMap Data. In Proceedings of the 29th International Conference on Advances in Geographic Information Systems, Beijing, China, 2–5 November 2021; pp. 536–539. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | URL | Description | Access date |
|---|---|---|---|
| wd | http://www.wikidata.org/entity/ | Entities in Wikidata | 10 October 2023 |
| osm | https://www.openstreetmap.org/ | Entities in OpenStreetMap | |
| lgdo | http://linkedgeodata.org/ontology/ | Entities in LinkedGeodata [10] | |
| wkgs | http://www.worldkg.org/schema/ | Entities in worldKG [12] | |
| geosparql | http://www.opengis.net/ont/geosparql/ | Geosparql ontology [29] |
| No. | Type | Number of Features | No. | Type | Number of Features |
|---|---|---|---|---|---|
| 1 | Accomodation | 2 | 7 | InfoCenter | 1 |
| 2 | AirChamber | 1 | 8 | NursingRoom | 1 |
| 3 | Atrium | 1 | 9 | Ticket | 1 |
| 4 | BookStore | 1 | 10 | Toilet | 8 |
| 5 | Deck | 1 | 11 | Office | 6 |
| 6 | Hallway | 3 | 12 | Residence | 16 |
| Construction Element | IndoorGML Feature | Generation Method | |
|---|---|---|---|
| PrimalSpaceFeature | Wall (Polygon) | CellSpace | 3D polygon extrusion |
| Door (point) | CellSpace | 3D polygon extrusion, intersection with solids from Wall polygon | |
| CellSpaceBoundary | Intersection between wall solid and door solid | ||
| MultiLayeredGraph | Points (line) connecting center of wall (point) | State | Center point of the 3D solid |
| Transition | Extraction of the connection relationship between centers. | ||
| Path (line) | State and Transition | Extraction of the movement path’s point | |
| 2D Shapefile Features | Count | RDF Triples | Count | Accuracy (%) | |
|---|---|---|---|---|---|
| Room | 53 | Subject | CellSpace | 61 | >100 |
| Door | 76 | CellSpaceBoundary | 76 | 100 | |
| - | State | 204 | 100 | ||
| - | Transition | 203 | 100 | ||
| - | Predicate | connects | 406 | 100 | |
| - | partialboundedBy | 152 | 100 | ||
| - | path | 203 | 100 | ||
| - | related | 274 | 100 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, H.; Yu, K.; Kim, J. Generating Spatial Knowledge Graphs with 2D Indoor Floorplan Data: A Case Study on the Jeonju Express Bus Terminal. ISPRS Int. J. Geo-Inf. 2024, 13, 52. https://doi.org/10.3390/ijgi13020052
Jang H, Yu K, Kim J. Generating Spatial Knowledge Graphs with 2D Indoor Floorplan Data: A Case Study on the Jeonju Express Bus Terminal. ISPRS International Journal of Geo-Information. 2024; 13(2):52. https://doi.org/10.3390/ijgi13020052
Chicago/Turabian StyleJang, Hanme, Kiyun Yu, and Jiyoung Kim. 2024. "Generating Spatial Knowledge Graphs with 2D Indoor Floorplan Data: A Case Study on the Jeonju Express Bus Terminal" ISPRS International Journal of Geo-Information 13, no. 2: 52. https://doi.org/10.3390/ijgi13020052
APA StyleJang, H., Yu, K., & Kim, J. (2024). Generating Spatial Knowledge Graphs with 2D Indoor Floorplan Data: A Case Study on the Jeonju Express Bus Terminal. ISPRS International Journal of Geo-Information, 13(2), 52. https://doi.org/10.3390/ijgi13020052