Mapping VHR Water Depth, Seabed and Land Cover Using Google Earth Data

Abstract
:
1. Introduction

2. Materials and Methods
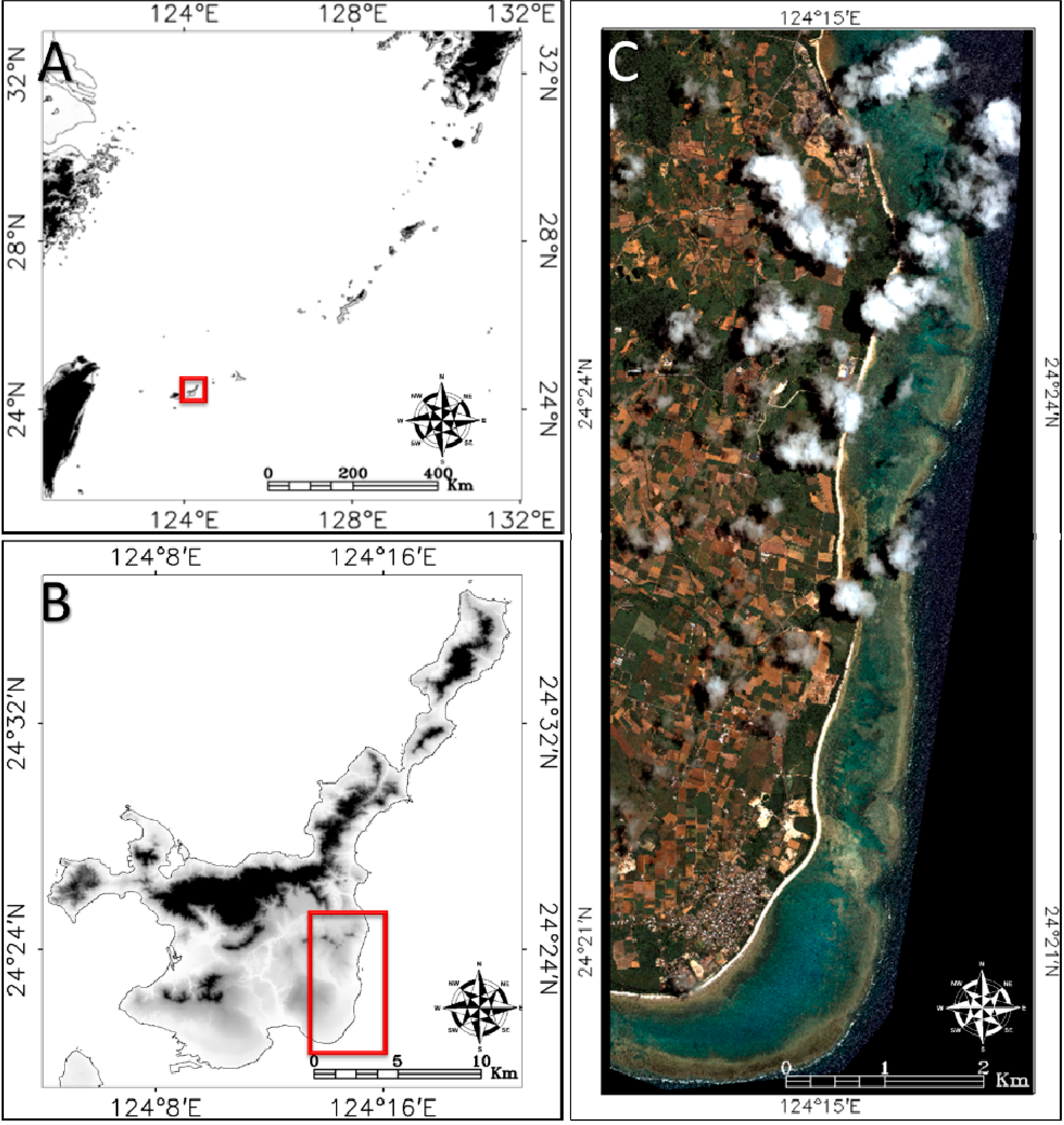
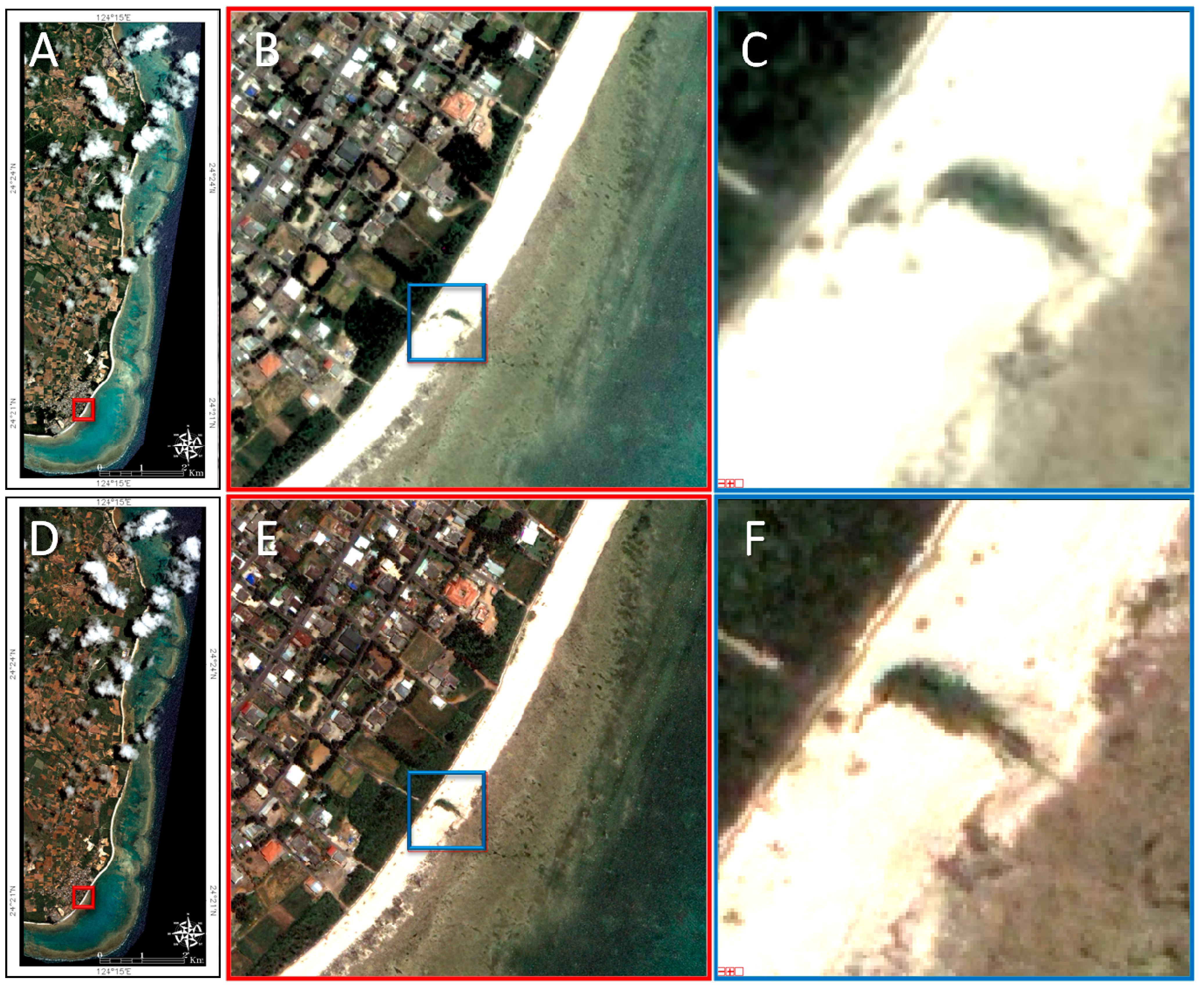
2.1. Study Site
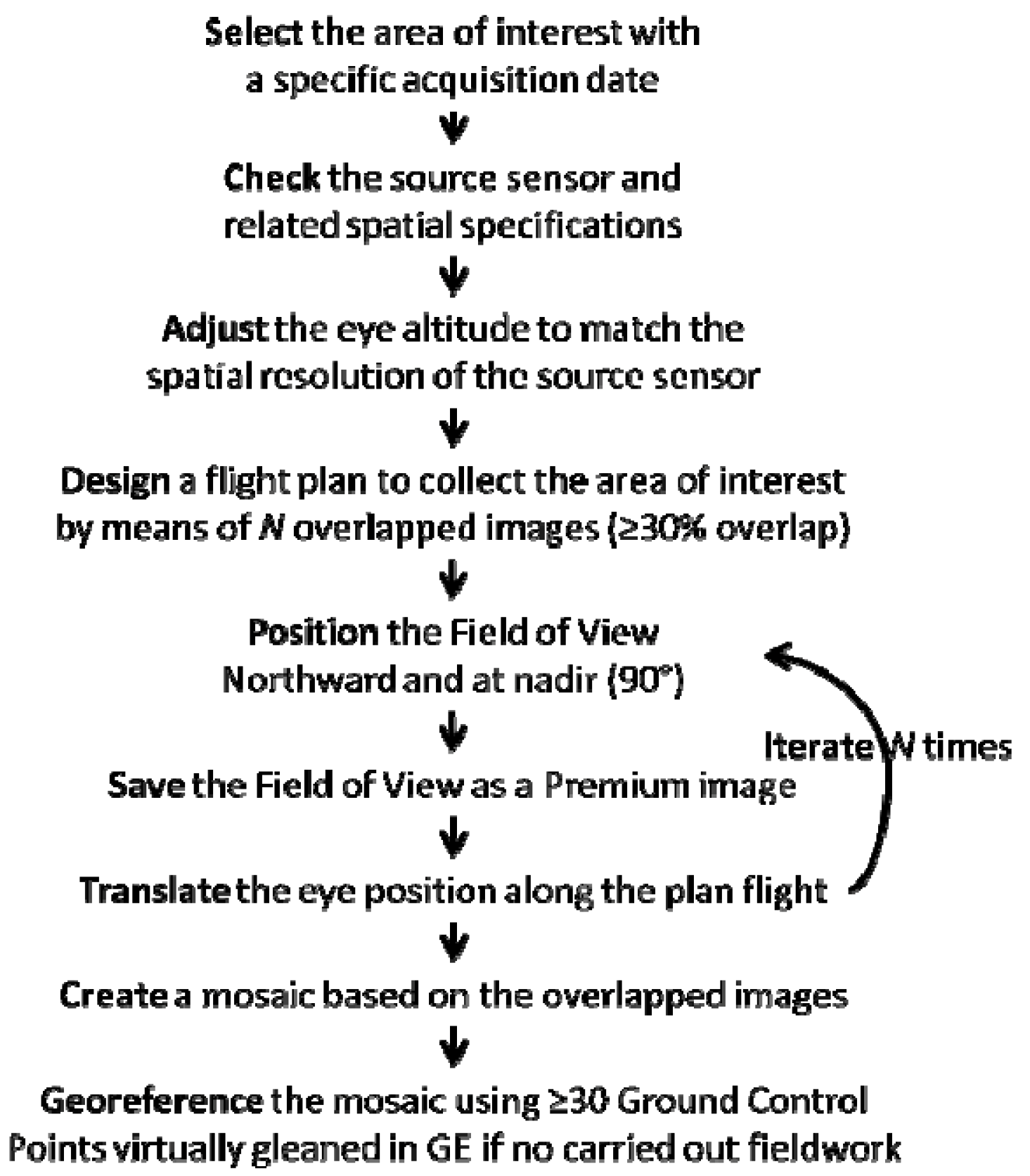
2.2. Remotely Sensed Datasets



2.3. Coastal Water Depth and Cover Types
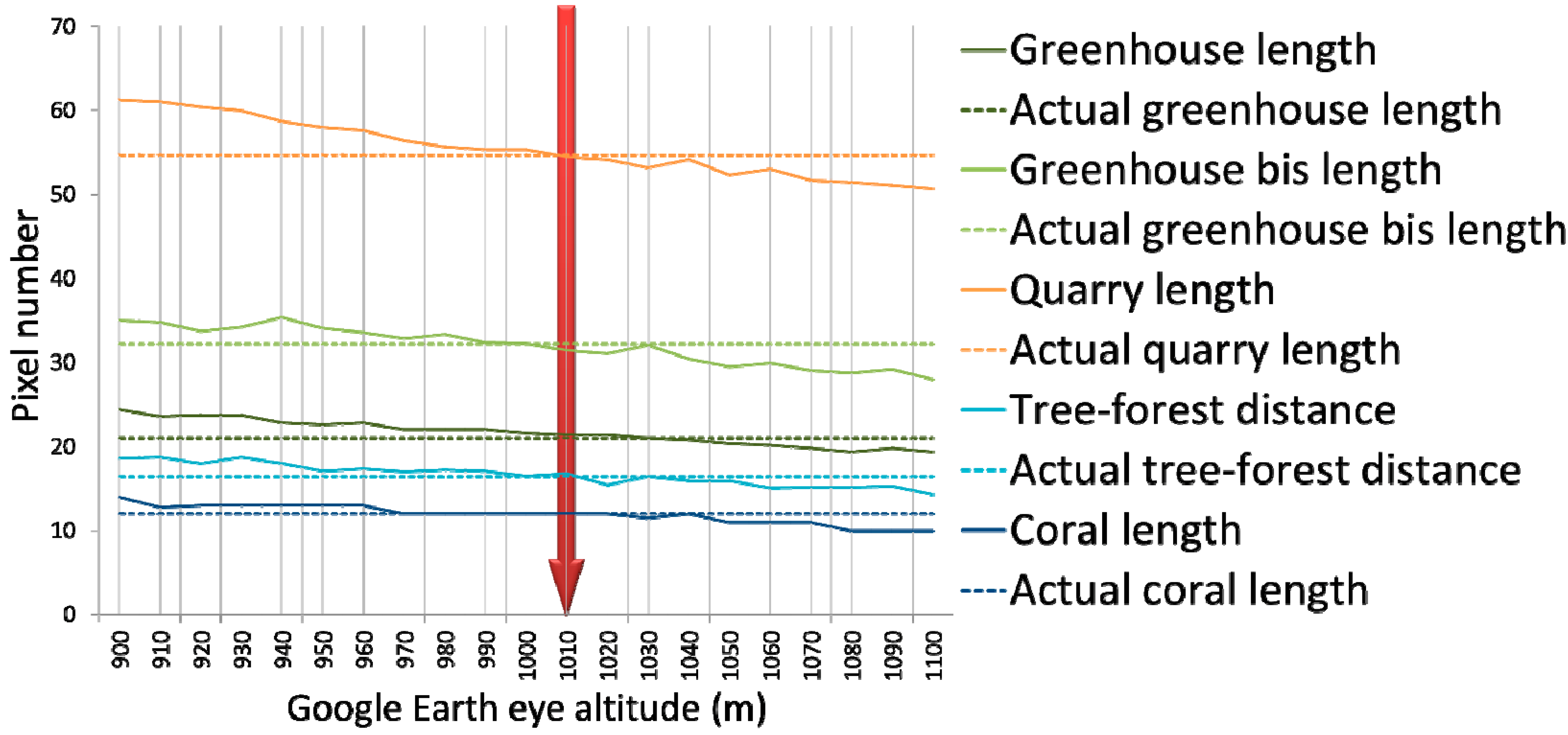
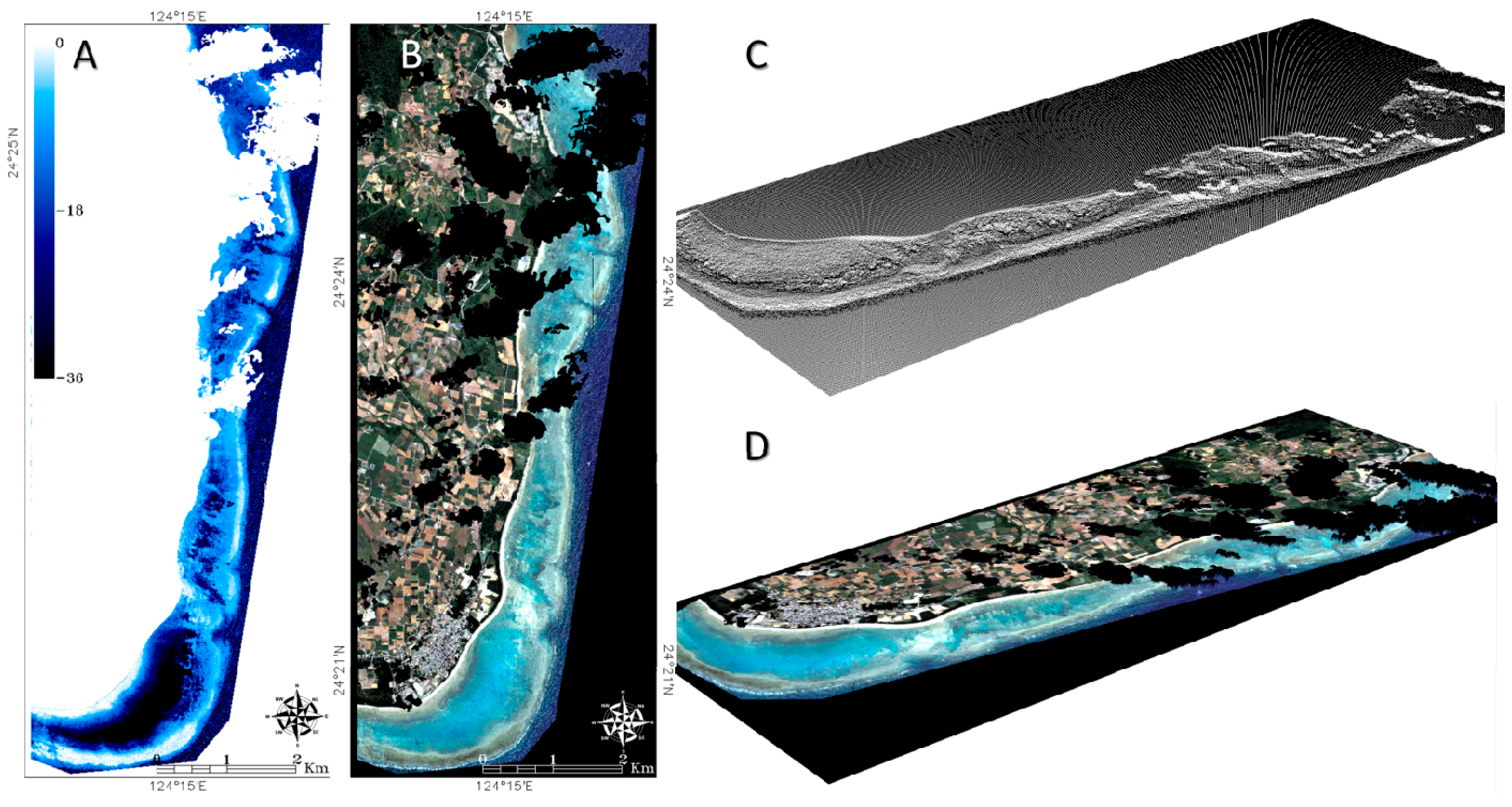
2.3.1. Bathymetry and Topography

2.3.2. Coastal Cover Types

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Realm | Cover Type | Description |
|---|---|---|
| Marine | Abenthic | Optical deep water |
| Mud | Terrigeneous and coralligeneous clastic sediment below 0.0625 mm grain size | |
| Fine sand | Coralligeneous clastic sediment ranging from 0.0625 to 0.25 mm grain size | |
| Sand | Coralligeneous clastic sediment ranging from 0. 25 to 0.5 mm grain size | |
| Coarse sand | Coralligeneous clastic sediment ranging from 0.5 to 2 mm grain size | |
| Pebble | Coralligeneous clastic sediment ranging from 2 to 64 mm grain size | |
| Cobble | Coralligeneous clastic sediment ranging from 64 to 256 mm grain size | |
| Boulder | Coralligeneous clastic sediment ranging above 256 mm grain size | |
| Blue algae | Cyanobacteria communities eroding consolidated coralligeneous sediment | |
| Brown algae | Tufts or carpets of macroalgae dominated by Turbinaria spp. and Padinae spp. | |
| Calcareous algae | Encrusting algae communities (e.g., coralline) eroding consolidated coralligeneous sediment | |
| Seagrass | Meadows of aquatic phanerogam composed of Cymodocea sp., Halodule sp., Halophila sp., Zostera japonica | |
| Hard coral bommie | Pseudo-spherical massive coral colony dominated by hexacorallian Porites spp. | |
| Hard coral thicket | Field of thicket coral colony dominated by hexacorallian Acropora spp. | |
| Blue coral | Pseudo-spherical massive coral colony dominated by octocorallian Heliopora coerulea | |
| Terrestrial | River | Elongated inland water body |
| Wet sand | Intertidal coralligeneous clastic sediment ranging from 0.0625 to 2 mm grain size | |
| Dry sand | Supratidal coralligeneous clastic sediment ranging from 0.0625 to 2 mm grain size | |
| Soil | Various bare substrata devoid of vegetation (if any, very sparse) | |
| Grass | Natural and mowed herbaceous (≤0.5 m) poaceae communities | |
| Crop field | Cultivated herbaceous vegetables and fruits | |
| Sugar cane field | Cultivated shrub poaceae (≥0.5 and ≤6 m) | |
| Mangrove forest | Natural mix of shrubs and trees (≥6 m) rhizophoraceae | |
| Dark forest | Natural mix of tree aquifoliaceae dominated by Ardisia quinquegona | |
| Road | Anthropogenic infrastructure characterized by asphalt-covered curve lines | |
| Roof | Anthropogenic infrastructure made of ceramic or metallic tiles |
2.3.3. Classification of Coastal Covers and Accuracy Assessment
3. Results
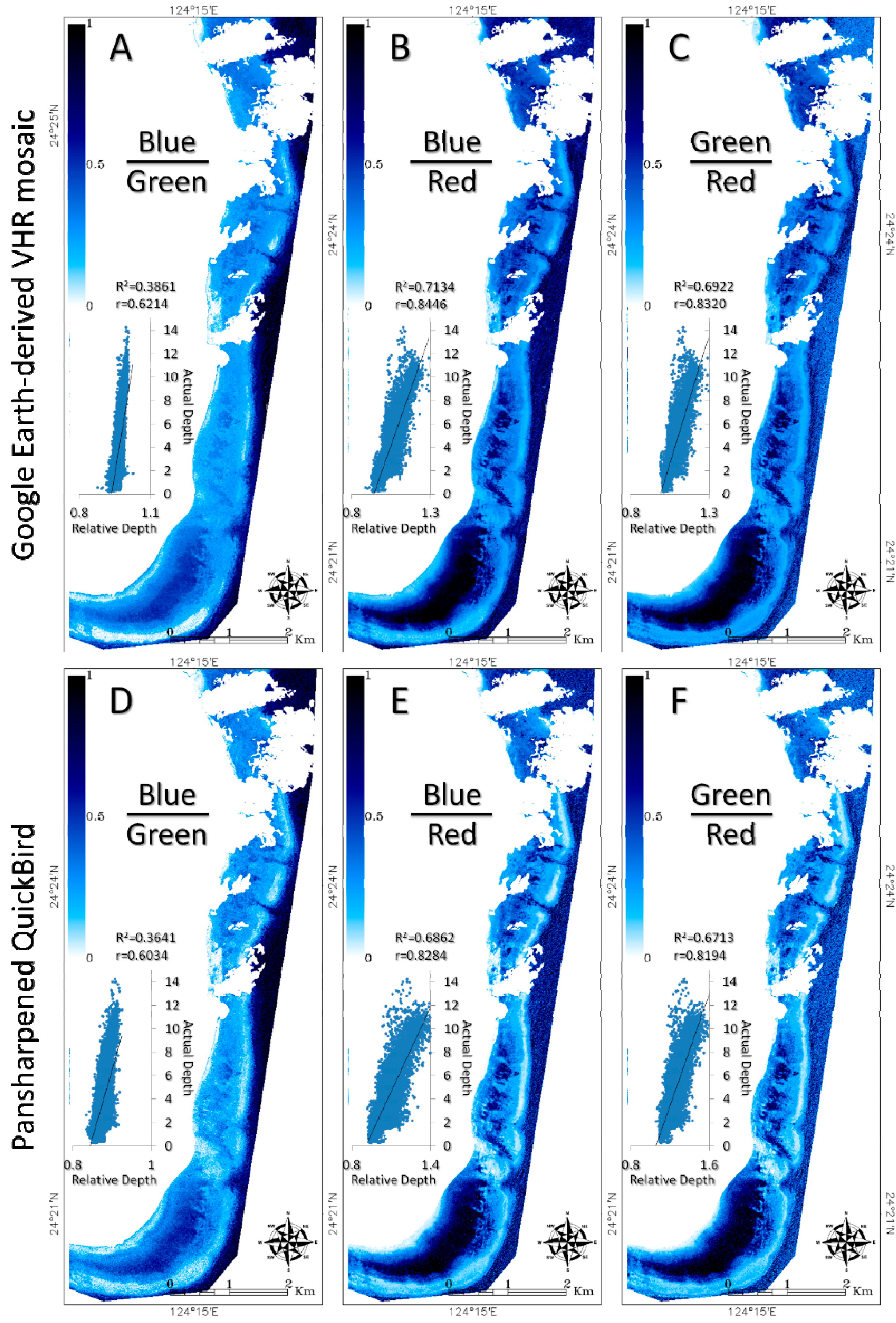
3.1. Comparison of the Water Depth Retrieval

| Google Earth | QuickBird | ||||||
|---|---|---|---|---|---|---|---|
| Blue/Green | Blue/Red | Green/Red | Blue/Green | Blue/Red | Green/Red | ||
| Google Earth | Blue/Green | X | 69.74 | 65.10 | 4.82 | NC | NC |
| Blue/Red | 69.74 | X | 4.92 | NC | 6.29 | NC | |
| Green/Red | 65.10 | 4.92 | X | NC | NC | 4.76 | |
| QuickBird | Blue/Green | 4.82 | NC | NC | X | 68.38 | 65.18 |
| Blue/Red | NC | 6.29 | NC | 68.38 | X | 3.38 | |
| Green/Red | NC | NC | 4.76 | 65.18 | 3.38 | X | |

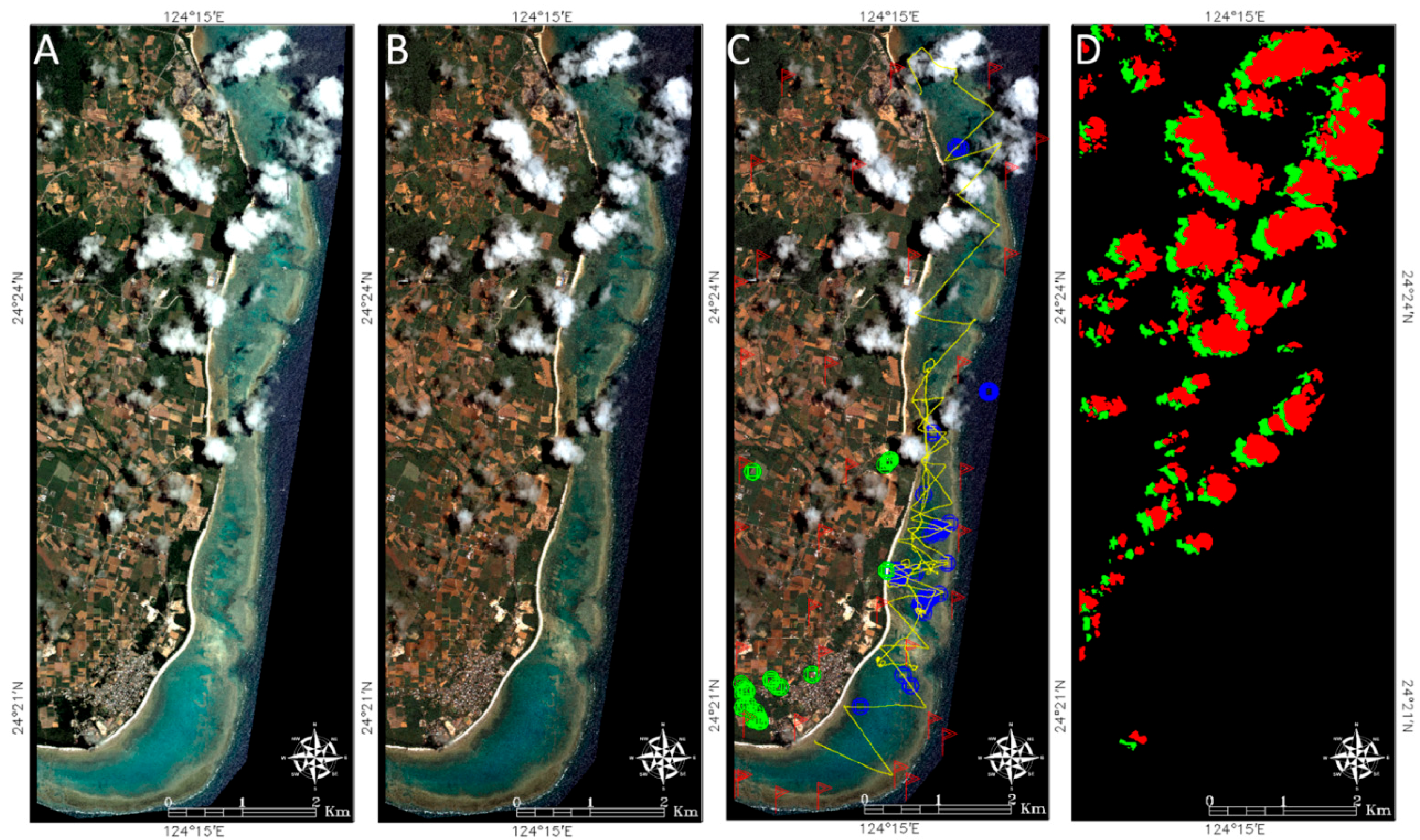
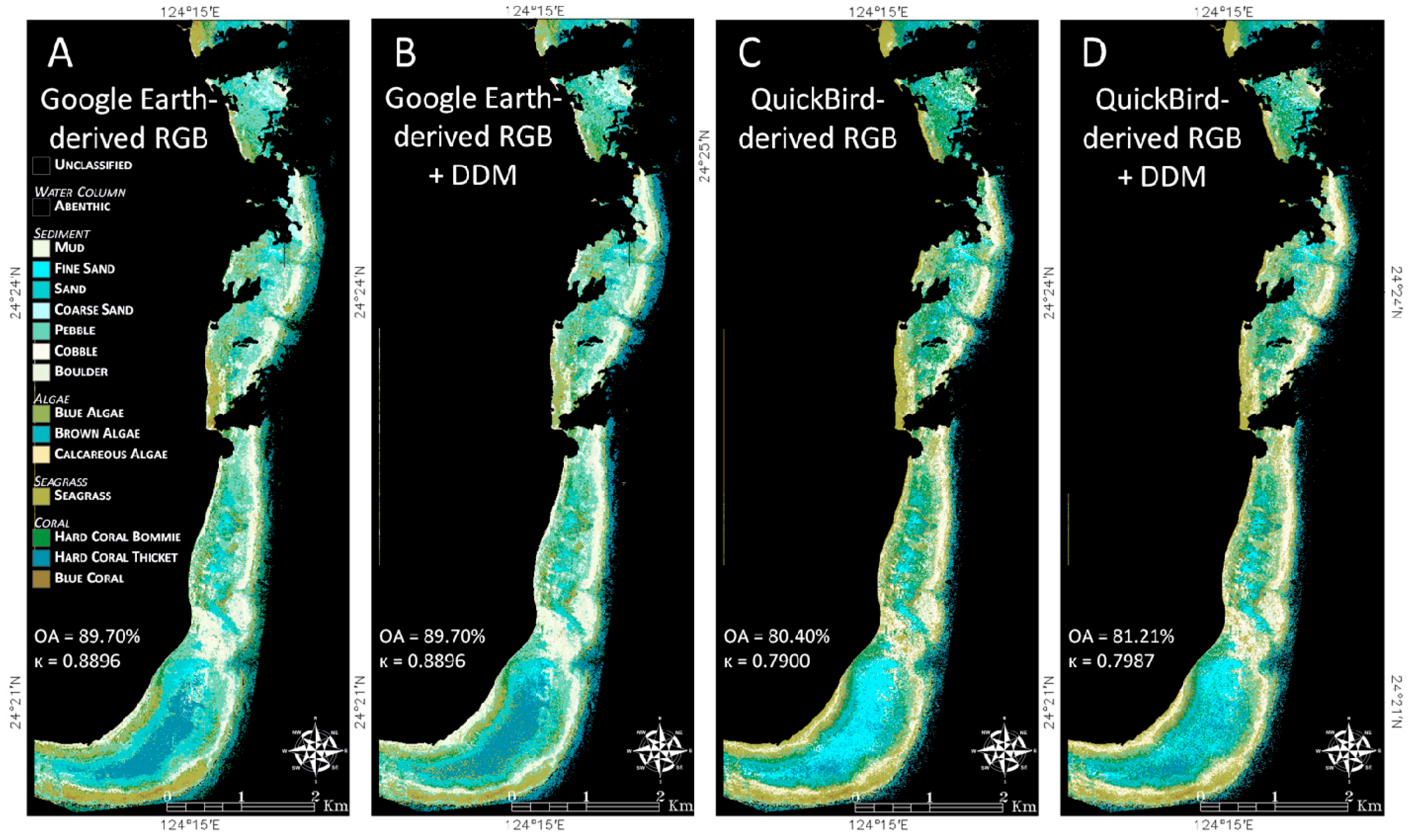
3.2. Comparison of the Seabed Cover Mapping

| Google Earth | QuickBird | |||||||
|---|---|---|---|---|---|---|---|---|
| RGB | RGB + DDM | RGB | RGB + DDM | |||||
| PA | UA | PA | UA | PA | UA | PA | UA | |
| Abenthic | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Mud | 90.91 | 100 | 90.91 | 83.33 | 75.76 | 92.59 | 84.85 | 87.5 |
| Fine sand | 100 | 100 | 96.97 | 100 | 100 | 100 | 96.97 | 100 |
| Sand | 100 | 100 | 96.97 | 96.97 | 100 | 97.06 | 96.97 | 94.12 |
| Coarse sand | 100 | 100 | 100 | 94.29 | 100 | 100 | 100 | 91.67 |
| Pebble | 100 | 100 | 75.76 | 60.98 | 100 | 97.06 | 84.85 | 70 |
| Cobble | 100 | 89.19 | 84.85 | 90.32 | 90.91 | 83.33 | 84.85 | 90.32 |
| Boulder | 90.91 | 100 | 100 | 94.29 | 96.97 | 94.12 | 96.97 | 94.12 |
| Blue algae | 100 | 97.06 | 75.76 | 65.79 | 100 | 86.84 | 75.76 | 60.98 |
| Brown algae | 100 | 100 | 96.97 | 96.97 | 96.97 | 100 | 90.91 | 93.75 |
| Calcareous algae | 100 | 94.29 | 72.73 | 77.42 | 96.97 | 91.43 | 78.79 | 74.29 |
| Seagrass | 57.58 | 61.29 | 21.21 | 58.33 | 72.73 | 66.67 | 21.21 | 70 |
| Hard coral bommie | 63.64 | 70 | 54.55 | 66.67 | 81.82 | 77.14 | 60.61 | 68.97 |
| Hard coral thicket | 66.67 | 68.75 | 78.79 | 61.9 | 63.64 | 84 | 78.79 | 68.42 |
| Blue coral | 75.76 | 65.79 | 60.61 | 55.56 | 69.7 | 76.67 | 66.67 | 57.89 |
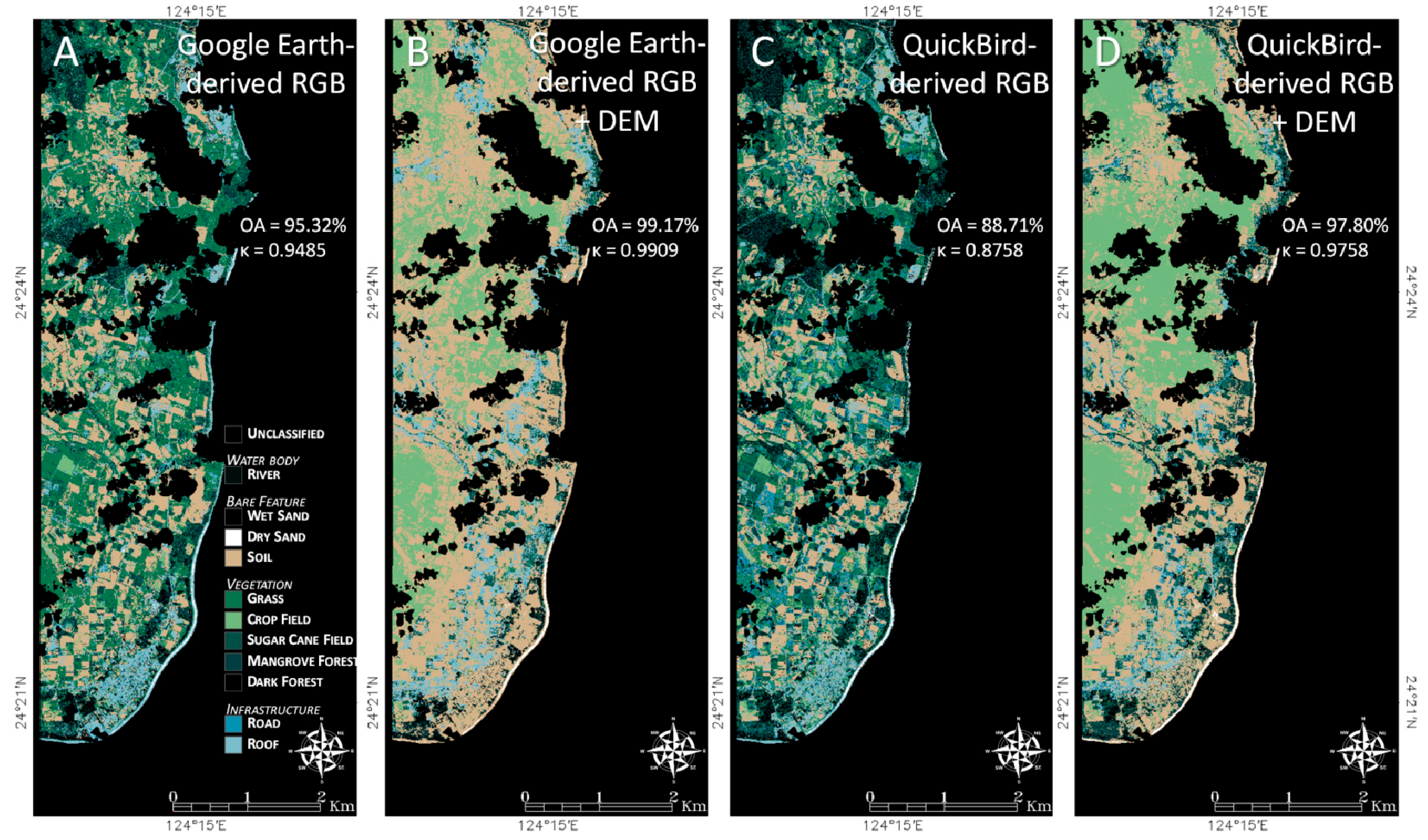
3.3. Comparison of the Land Cover Mapping

| Google Earth | QuickBird | |||||||
|---|---|---|---|---|---|---|---|---|
| RGB | RGB + DEM | RGB | RGB + DEM | |||||
| PA | UA | PA | UA | PA | UA | PA | UA | |
| River | 87.88 | 93.55 | 96.97 | 96.97 | 93.94 | 86.11 | 93.94 | 100 |
| Wet sand | 100 | 100 | 100 | 100 | 96.97 | 100 | 100 | 100 |
| Dry sand | 93.94 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Soil | 100 | 100 | 100 | 100 | 93.94 | 96.88 | 96.97 | 94.12 |
| Grass | 100 | 97.06 | 100 | 100 | 90.91 | 90.91 | 100 | 100 |
| Crop field | 100 | 100 | 100 | 100 | 100 | 94.29 | 93.94 | 100 |
| Sugar cane field | 96.97 | 100 | 100 | 100 | 100 | 94.29 | 100 | 100 |
| Mangrove forest | 96.97 | 88.89 | 96.97 | 96.97 | 48.48 | 64 | 100 | 94.29 |
| Dark forest | 96.97 | 91.43 | 100 | 100 | 78.79 | 76.47 | 100 | 100 |
| Road | 90.91 | 85.71 | 100 | 97.06 | 90.91 | 76.92 | 96.97 | 94.12 |
| Roof | 84.85 | 93.33 | 96.97 | 100 | 81.82 | 93.1 | 93.94 | 93.94 |
4. Discussion
4.1. Coastal Shallow Water Depth

4.2. Seamless Seabed and Land Cover Mapping
4.3. Limitations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Costanza, R.; d’Arge, R.; de Groot, R.; Farber, S.; Grasso, M.; Hannon, B.; Limburg, K.; Naeem, S.; O’Neill, R.V.; Paruelo, J.; et al. The value of the world’s ecosystem services and natural capital. Ecol. Econ. 1998, 25, 3–15. [Google Scholar] [CrossRef]
- Sukhdev, P. The Economics of Ecosystems and Biodiversity; European Communities: Wesseling, Germany, 2008. [Google Scholar]
- The Other 70% UNEP Marine and Coastal Strategy; UN-Gigiri: Nairobi, Kenya, 2011.
- Martínez, M.L.; Intralawan, A.; Vázquez, G.; Pérez-Maqueo, O.; Sutton, P.; Landgrave, R. The coasts of our world: Ecological, economic and social importance. Ecol. Econ. 2007, 63, 254–272. [Google Scholar] [CrossRef]
- Intergovernmental Panel on Climate Change (IPCC). Climate Change 2013—The Physical Science Basis: Working Group I Contribution to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgely, P.M., Eds.; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Adger, W.N.; Hughes, T.P.; Folke, C.; Carpenter, S.R.; Rockström, J. Social-ecological resilience to coastal disasters. Science 2005, 309, 1036–1039. [Google Scholar] [CrossRef] [PubMed]
- Cumming, G.S. Spatial resilience: Integrating landscape ecology, resilience, and sustainability. Landsc. Ecol. 2011, 26, 899–909. [Google Scholar] [CrossRef]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. Remote Sensing Handbook for Tropical Coastal Management; Edwards, A. J., Ed.; UNESCO Publishing: Paris, France, 2005. [Google Scholar]
- Landsat GeoCover ETM+ 2000 Edition Mosaics; USGS: Sioux Falls, SD, USA, 2004.
- GLSDEM, 90 m Scene GLSDEM_p123r024_utmz13; Global Land Cover Facility, University of Maryland: College Park, MD, USA, 2008.
- Liu, H.; Jezek, K.C. A complete high-resolution coastline of Antarctica extracted from orthorectified Radarsat SAR imagery. Photogramm. Eng. Remote Sens. 2004, 70, 605–616. [Google Scholar] [CrossRef]
- McClain, C.R.; Feldman, G.C.; Hooker, S.B. An overview of the SeaWiFS project and strategies for producing a climate research quality global ocean bio-optical time series. Deep Sea Res. II 2004, 51, 5–42. [Google Scholar] [CrossRef]
- MacMillan, D.; Bock, Y.; Fang, P.; Beckely, B.; Ma, C. Monitoring the TOPEX and Jason-1 microwave radiometers with GPS and VLBI wet zenith path delays. Mar. Geod. 2004, 27, 703–716. [Google Scholar] [CrossRef]
- Collin, A.; Archambault, P.; Planes, S. Bridging ridge-to-reef patches: Seamless classification of the coast using very high resolution satellite. Remote Sens. 2013, 5, 3583–3610. [Google Scholar] [CrossRef]
- Wang, L.; Sousa, W.P.; Gong, P.; Biging, G.S. Comparison of IKONOS and QuickBird images for mapping mangrove species on the Caribbean coast of Panama. Remote Sens. Environ. 2004, 91, 432–440. [Google Scholar] [CrossRef]
- Ghioca-Robrecht, D.M.; Johnston, C.A.; Tulbure, M.G. Assessing the use of multiseason Quickbird imagery for mapping invasive species in a Lake Erie coastal marsh. Wetlands 2008, 28, 1028–1039. [Google Scholar] [CrossRef]
- Dribault, Y.; Chokmani, K.; Bernier, M. Monitoring seasonal hydrological dynamics of minerotrophic peatlands using multi-date GeoEye-1 very high resolution imagery and object-based classification. Remote Sens. 2012, 4, 1887–1912. [Google Scholar] [CrossRef]
- Giri, C.; Ochieng, E.; Tieszen, L.L.; Zhu, Z.; Singh, A.; Loveland, T.; Masek, J.; Duke, N. Status and distribution of mangrove forests of the world using earth observation satellite data. Glob. Ecol. Biogeogr. 2011, 20, 154–159. [Google Scholar] [CrossRef]
- Gong, P.; Niu, Z.; Cheng, X.; Zhao, K.; Zhou, D.; Guo, J.; Liang, L.; Wang, X.; Li, D.; Huang, H.; et al. China’s wetland change (1990–2000) determined by remote sensing. Sci. China Earth Sci. 2010, 53, 1036–1042. [Google Scholar] [CrossRef]
- Guo, J.; Liang, L.; Gong, P. Removing shadows from Google Earth images. Int. J. Remote Sens. 2010, 31, 1379–1389. [Google Scholar] [CrossRef]
- Potere, D. Horizontal positional accuracy of Google Earth’s high-resolution imagery Archive. Sensors 2008, 8, 7973–7981. [Google Scholar] [CrossRef]
- Hu, Q.; Wu, W.; Xia, T.; Yu, Q.; Yang, P.; Li, Z.; Song, Q. Exploring the use of Google Earth imagery and object-based methods in land use/cover mapping. Remote Sens. 2013, 5, 6026–6042. [Google Scholar] [CrossRef]
- Mann, K.H.; Lazier, J.R.N. Dynamics of Marine Ecosystems: Biological-Physical Interactions in the Oceans, 2nd ed.; Blackwell Scientific Publications: Oxford, UK, 2006. [Google Scholar]
- Marine Biotic Survey (1989–1992) in the 4th National Survey on the Natural Environment: 1/10,000 Distribution Map of Coral Reefs; Environment Agency: Tokyo, Japan, 1996.
- Kayanne, H.; Harii, S.; Ide, Y.; Akimoto, F. Recovery of coral populations after the 1998 bleaching on Shiraho Reef, in the southern Ryukyus, NW Pacific. Mar. Ecol. Prog. Ser. 2002, 239, 93–103. [Google Scholar] [CrossRef]
- Lin, C.Y.; Wu, M.; Bloom, J.A.; Cox, I.J.; Miller, M.L.; Lui, Y.M. Rotation, scale, and translation resilient watermarking for images. IEEE Trans. Imag. Process. 2001, 10, 767–782. [Google Scholar] [CrossRef]
- Laben, C.A.; Brower, B.V. Process for Enhancing the Spatial Resolution of Multispectral Imagery Using Pan-Sharpening. U.S. Patent 6,011,875, 4 January 2000. [Google Scholar]
- Heyman, W.D.; Ecochard, J.L.B.; Biasi, F.B. Low-cost bathymetric mapping for tropical marine conservation—A focus on reef fish spawning aggregation sites. Mar. Geod. 2007, 30, 37–50. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Collin, A.; Hench, J.L. Towards deeper measurements of tropical reefscape structure using the WorldView-2 spaceborne sensor. Remote Sens. 2012, 4, 1425–1447. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; Congalton, R., Green, K., Eds.; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Collin, A.; Planes, S. Enhancing coral health detection using spectral diversity indices from WorldView-2 imagery and machine learners. Remote Sens. 2012, 4, 3244–3264. [Google Scholar] [CrossRef]
- Smith, R.C.; Baker, K.S. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef] [PubMed]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM Version 2. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011.
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Collin, A.; Nadaoka, K.; Nakamura, T. Mapping VHR Water Depth, Seabed and Land Cover Using Google Earth Data. ISPRS Int. J. Geo-Inf. 2014, 3, 1157-1179. https://doi.org/10.3390/ijgi3041157
Collin A, Nadaoka K, Nakamura T. Mapping VHR Water Depth, Seabed and Land Cover Using Google Earth Data. ISPRS International Journal of Geo-Information. 2014; 3(4):1157-1179. https://doi.org/10.3390/ijgi3041157
Chicago/Turabian StyleCollin, Antoine, Kazuo Nadaoka, and Takashi Nakamura. 2014. "Mapping VHR Water Depth, Seabed and Land Cover Using Google Earth Data" ISPRS International Journal of Geo-Information 3, no. 4: 1157-1179. https://doi.org/10.3390/ijgi3041157
APA StyleCollin, A., Nadaoka, K., & Nakamura, T. (2014). Mapping VHR Water Depth, Seabed and Land Cover Using Google Earth Data. ISPRS International Journal of Geo-Information, 3(4), 1157-1179. https://doi.org/10.3390/ijgi3041157