
Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services


Abstract
:1. Introduction
2. Methodology
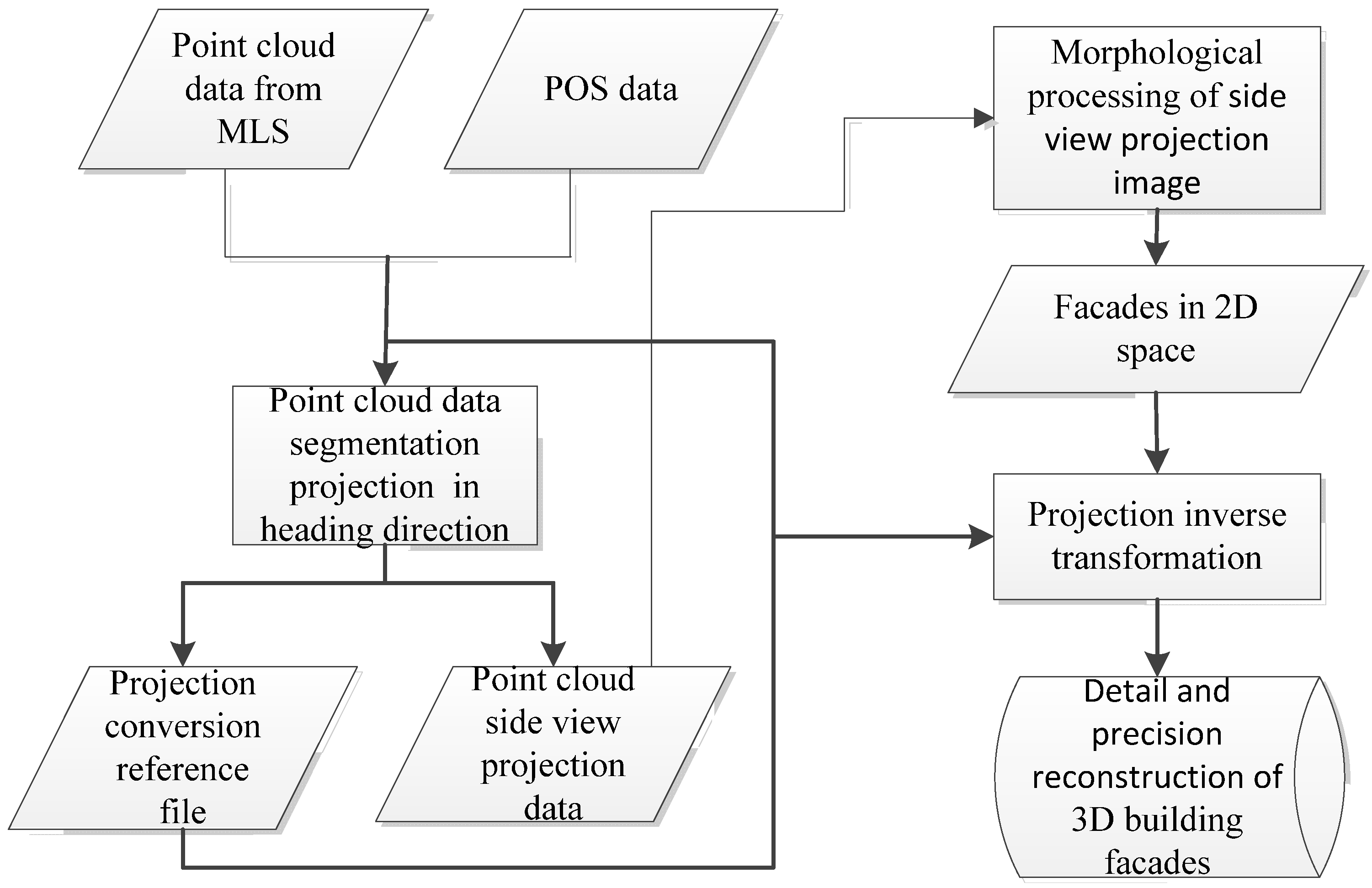
2.1. Technical Framework of the Proposed Approach
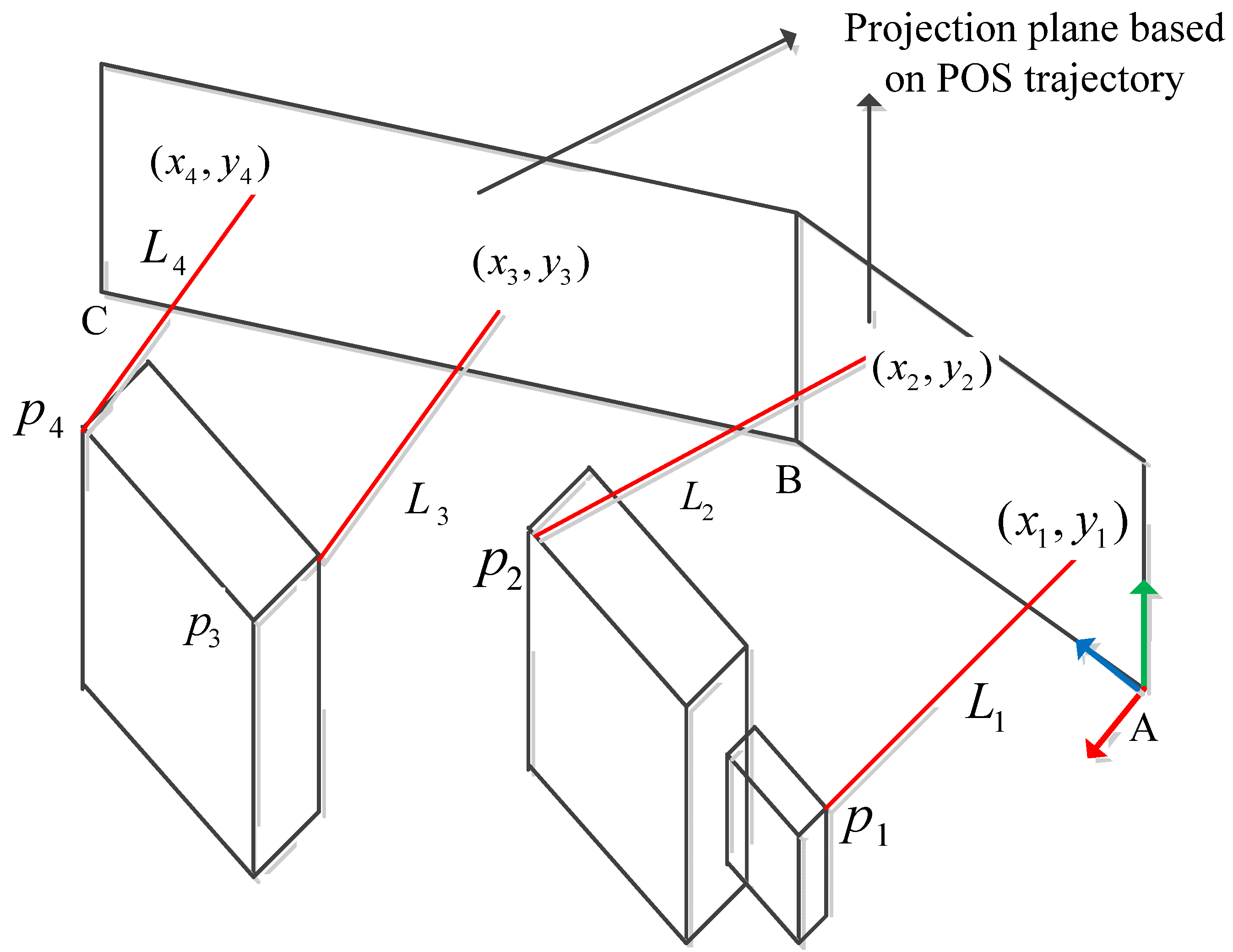
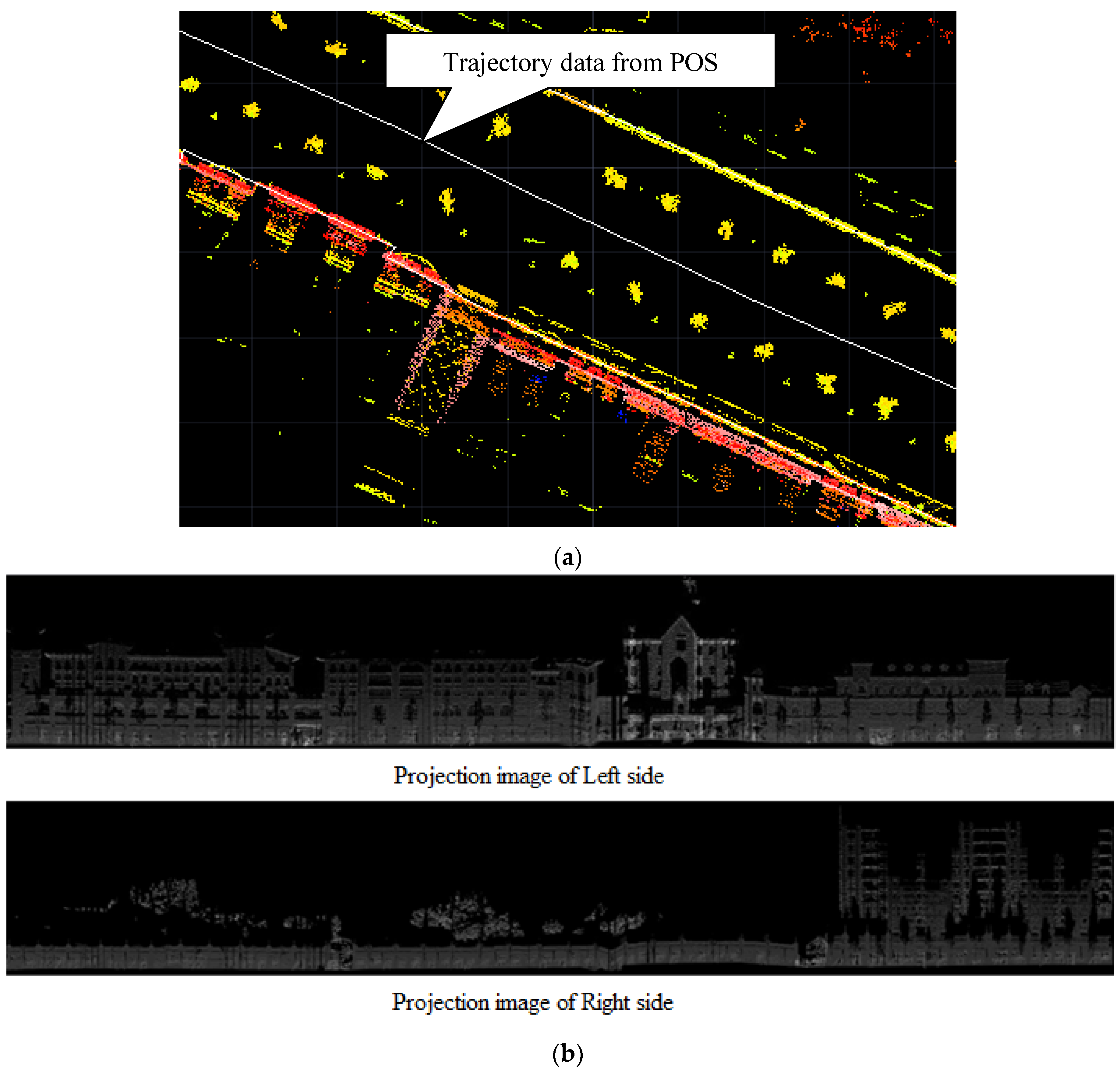
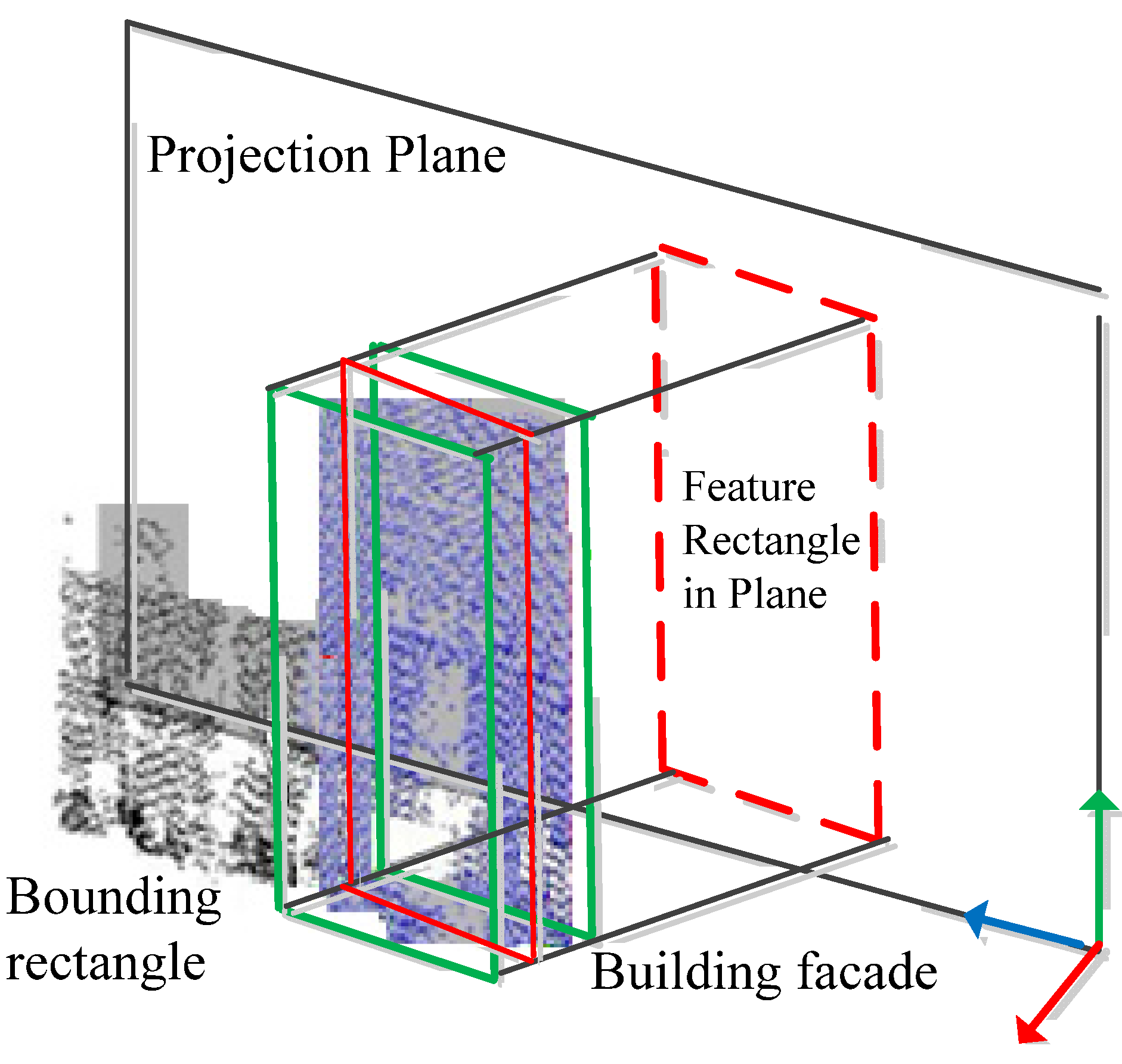
2.2. Point Cloud Projection Based on POS
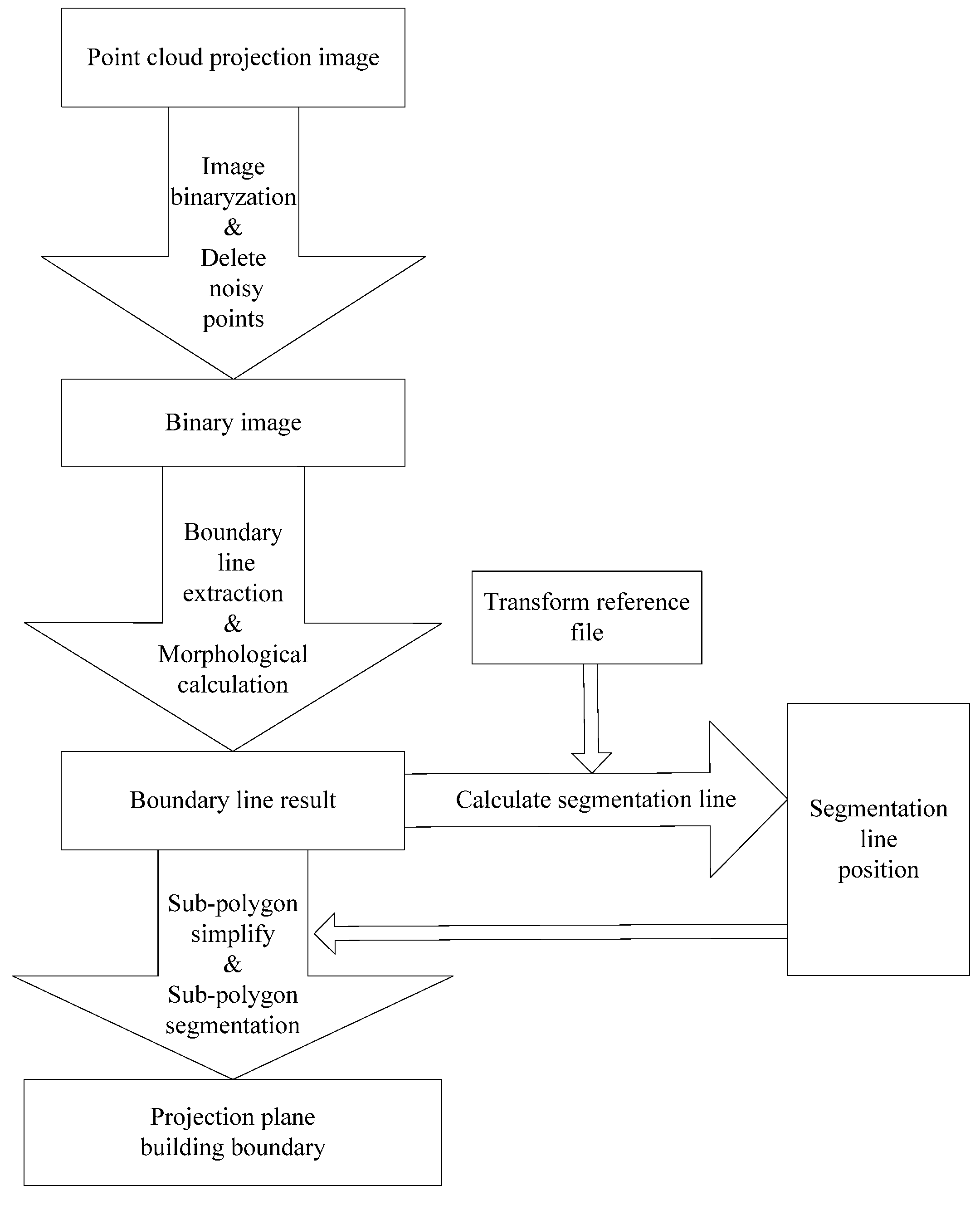
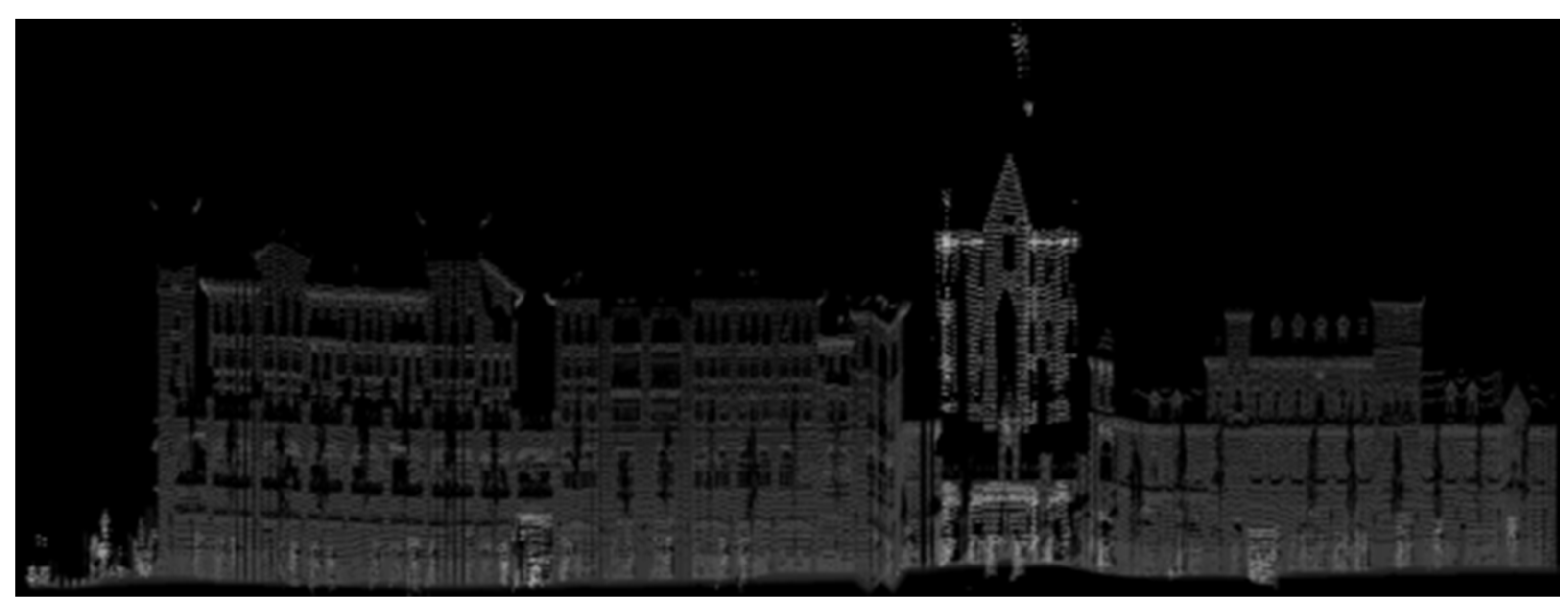
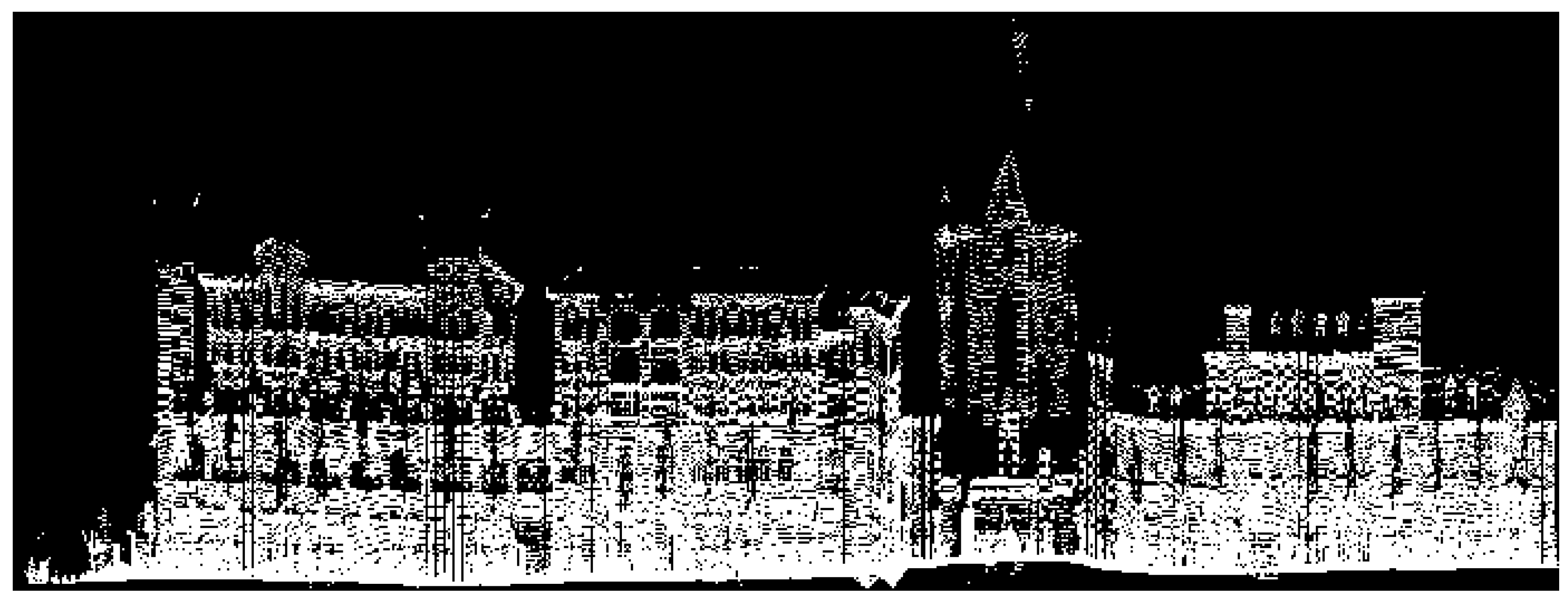
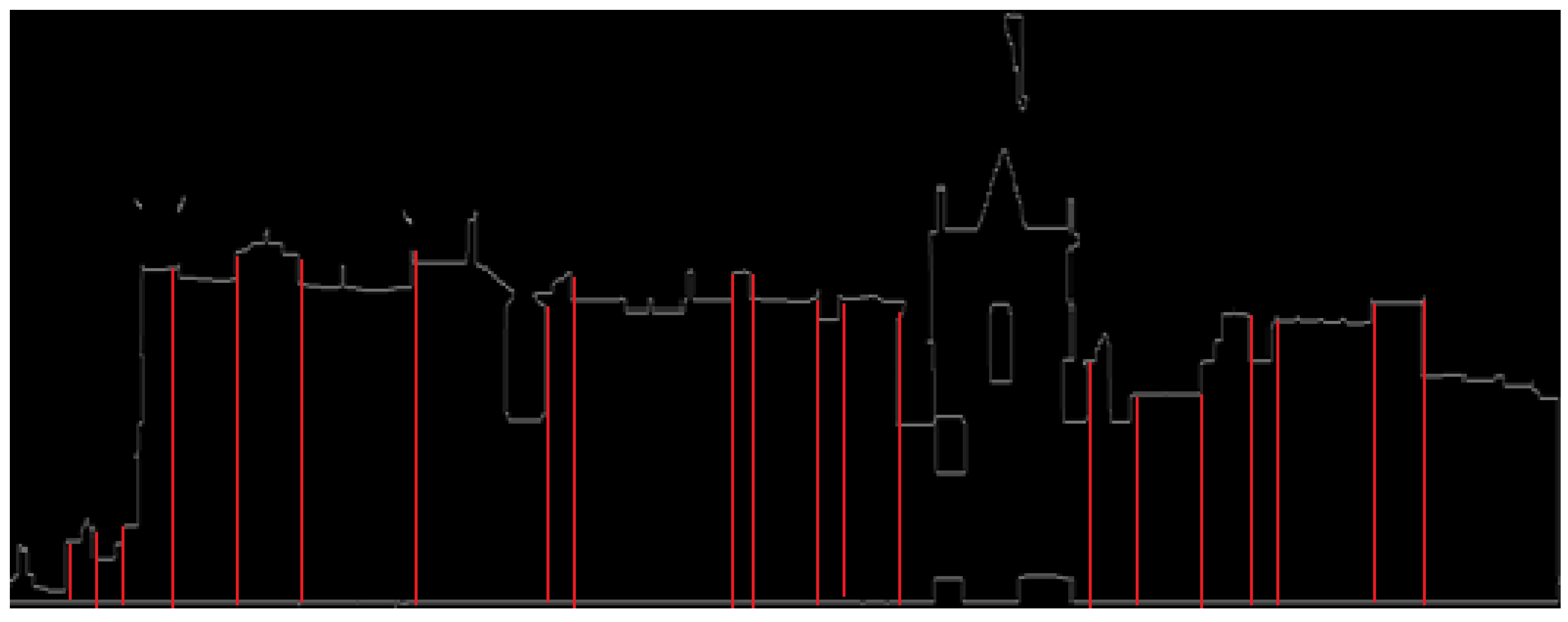
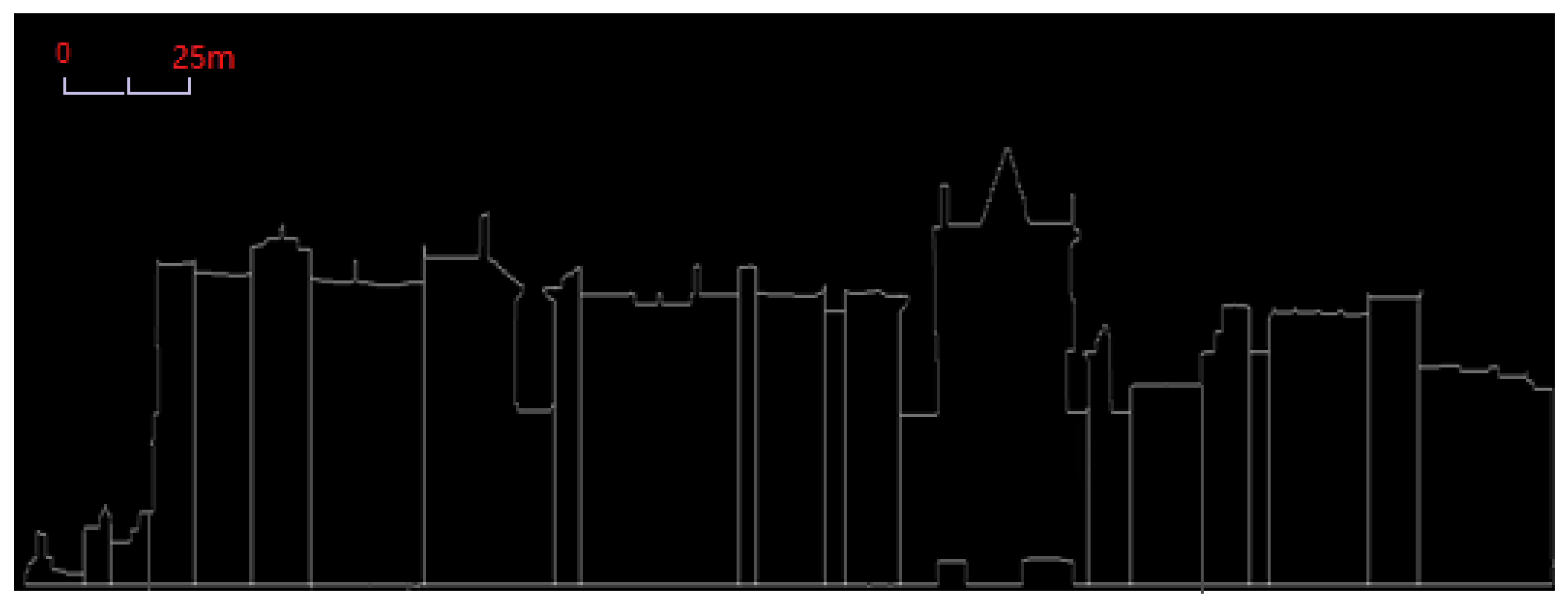
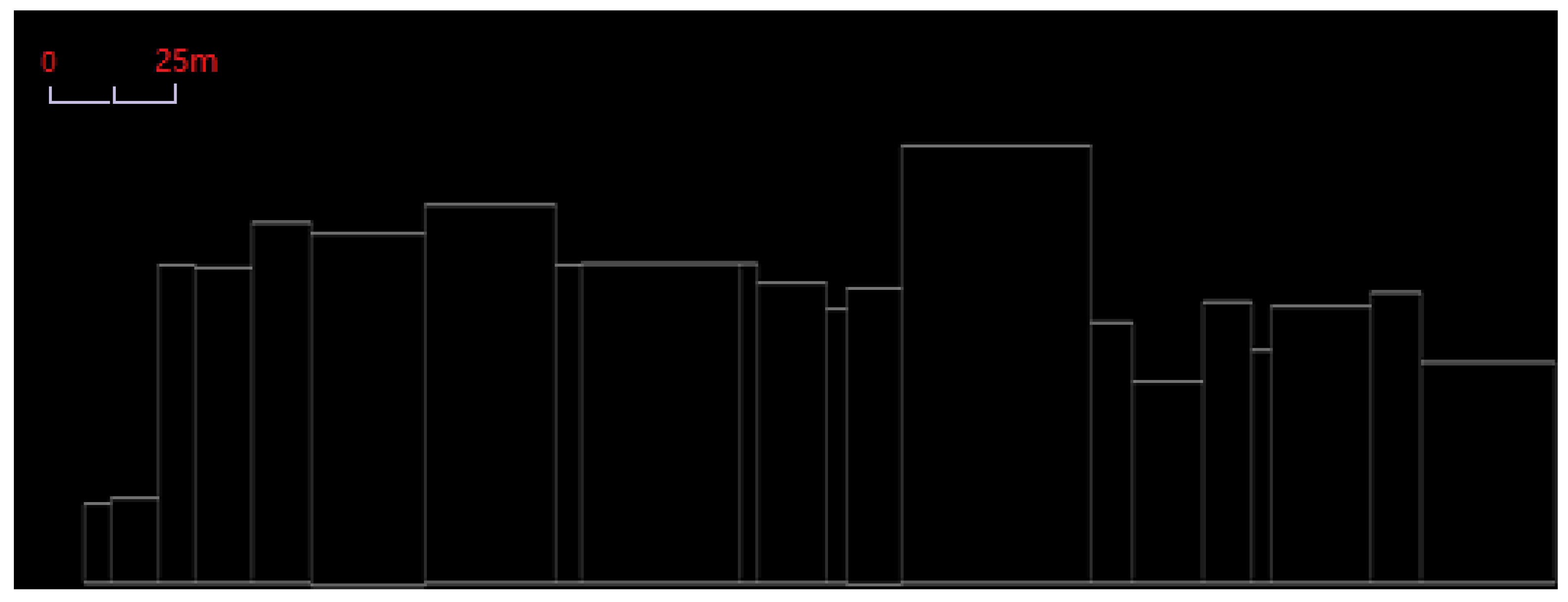
2.3. Façade Extraction from Point Cloud Projection Image after Morphological Filtering
- ①
- Relationships between each pixel gray value and distance of LIDAR point to the projection plane. The bigger the gray value, the farther it is from the projection plane.
- ②
- As the chosen projection planes are a group of continuous façades of different buildings, an abrupt change may appear along the direction of the connection position of the two façades. This manifests in images as missing pixel information of one or many columns.
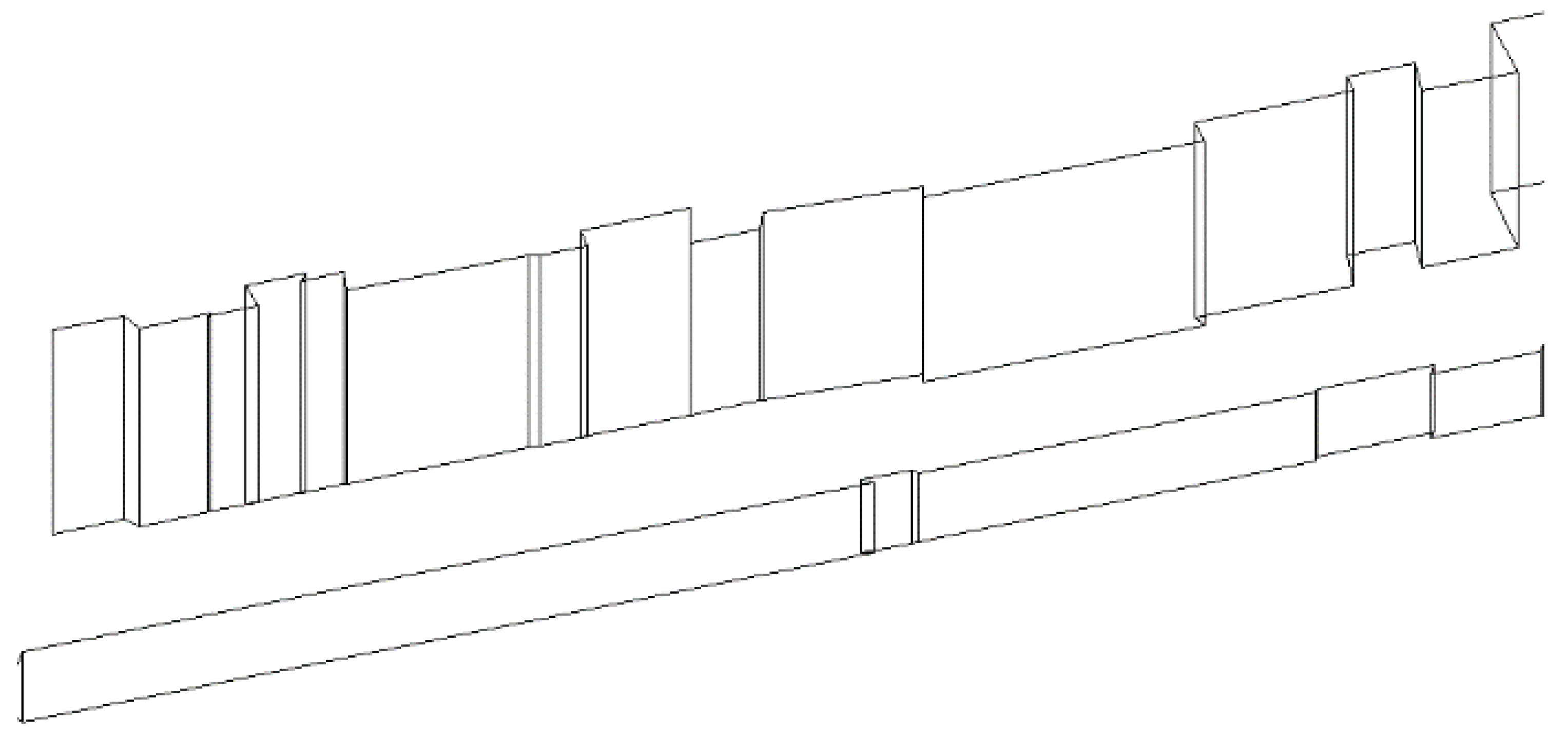
2.4. Building Façade Pieces Reconstruction in 3D Point Cloud Space
3. Experiments and Results
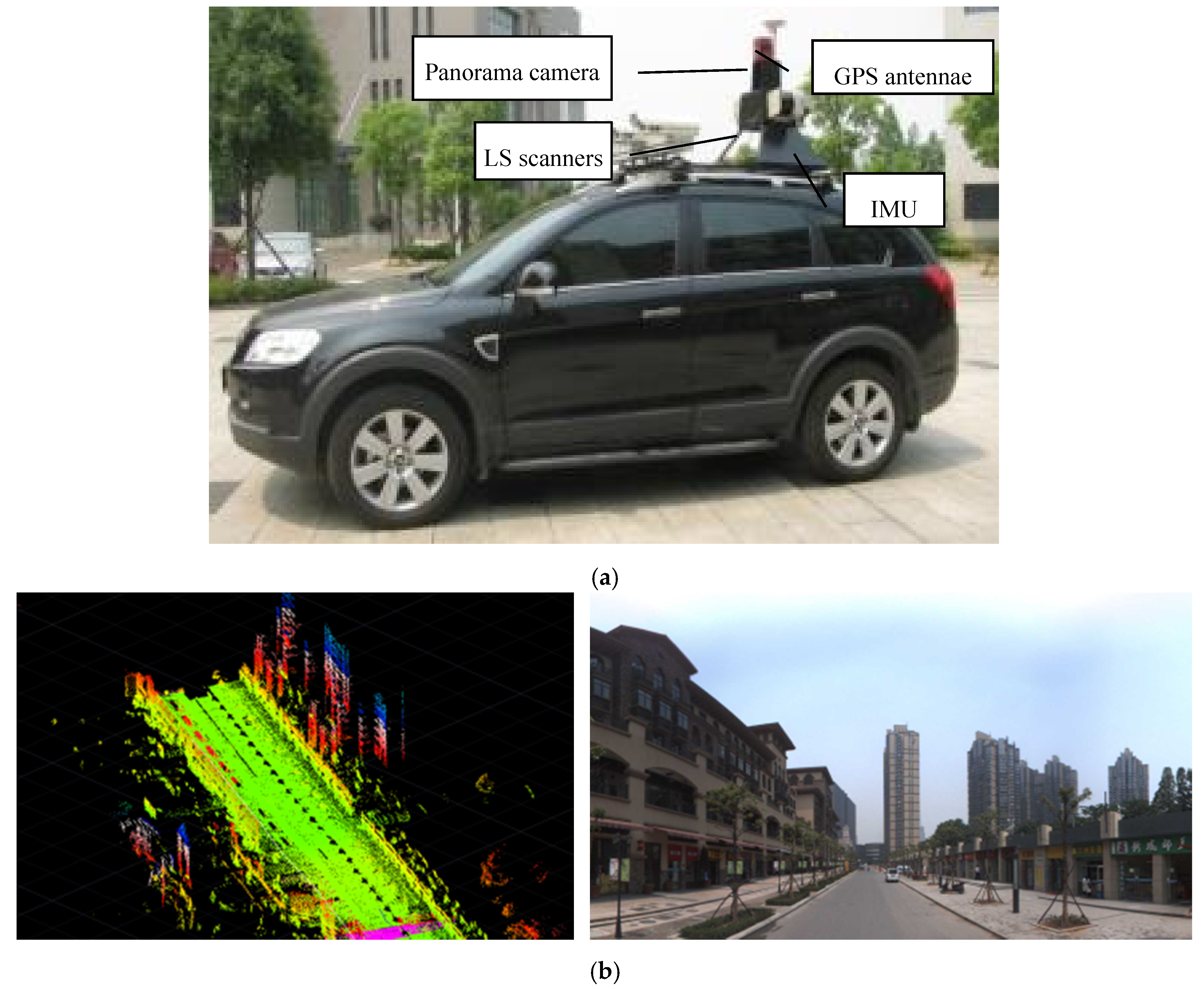
3.1. Datasets
3.2. Result Analysis
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Majid, Z.; Chong, A.K.; Ahmad, A.; Setan, H.; Samsudin, A.R. Photogrammetry and 3D laser scanning as spatial data capture techniques for a national craniofacial database. Photogramm. Rec. 2005, 20, 48–68. [Google Scholar] [CrossRef]
- Wang, R. 3D building modeling using images and LIDAR: A review. Int. J. Image Data Fusion 2013, 4, 273–292. [Google Scholar] [CrossRef]
- Elseberg, J.; Borrmann, D.; Nüchter, A. Algorithmic solutions for computing precise maximum likelihood 3D point clouds from mobile laser scanning platforms. Remote Sens. 2013, 5, 5871–5906. [Google Scholar] [CrossRef]
- Poreba, M.; Goulette, F. Line segment-based approach for accuracy assessment of MLS point clouds in urban areas. In Proceedings of the 8th International Symposium on Mobile Mapping Technology, Tainan, Taiwan, 1–3 May 2013; pp. 660–665.
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Automatic detection and feature estimation of windows in 3D urban point clouds exploiting façade symmetry and temporal correspondences. Int. J. Remote Sens. 2014, 35, 7726–7748. [Google Scholar] [CrossRef]
- Bing, L.V.; Zhong, R.F.; Wang, J.N. Vehicle-borne mobile laser scanner products: A review. Geomat. Spat. Inf. Technol. 2012, 35, 184–187. [Google Scholar]
- Rutzinger, M.; Höfle, B.; Oude Elberink, S.; Vosselman, G. Feasibility of facade footprint extraction from mobile laser scanning data. Photogramm. Fernerkund. Geoinf. 2011, 6952, 97–107. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.K.; Elberink, S.J.O.; Vosselman, G. Tree modelling from mobile laser scanning data-sets. Photogramm. Rec. 2011, 26, 361–372. [Google Scholar] [CrossRef]
- Anguelov, D.; Dulong, C.; Filip, D.; Christian, F.; Stéphane, L.; Richard, L. Google street view: Capturing the world at street level. Computer 2010, 43, 32–38. [Google Scholar] [CrossRef]
- Hara, K.; Le, V.; Froehlich, J. Combining crowdsourcing and Google street view to identify street-level accessibility problem. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; pp. 631–640.
- Torii, A.; Havlena, M.; Pajdla, T. From Google Street View to 3D city models. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Kyoto, Japan, 27 September–4 October 2009; pp. 2188–2195.
- Sampath, A.; Shan, J. Segmentation and reconstruction of polyhedral building roofs from aerial LIDAR point clouds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1554–1567. [Google Scholar] [CrossRef]
- Wang, X.; Li, P. Extraction of earthquake-induced collapsed buildings using very high-resolution imagery and airborne LIDAR data. Int. J. Remote Sens. 2015, 36, 2163–2183. [Google Scholar] [CrossRef]
- Gilani, S.A.N.; Awrangjeb, M.; Lu, G. An automatic building extraction and regularization technique using LiDAR point cloud data and orthimage. Remote Sens. 2016, 8, 258. [Google Scholar] [CrossRef]
- Hui, Z.Y.; Hu, Y.J.; Xu, P. Automatic Extraction of Building Footprints from LIDAR Using Image Based Methods Geo-Informatics in Resource Management and Sustainable Ecosystem; Springer: Berlin/Heidelberg, Germany, 2015; pp. 79–86. [Google Scholar]
- Sun, S.; Savalggio, C. Complex building roof detection and strict description from LIDAR data and orthorectified aerial imagery. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; Volume 22, pp. 5466–5469.
- Arachchige, N.H.; Perera, S.N.; Maas, H.G. Automatic processing of mobile laser scanner point clouds for building facade detection. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B5, 187–192. [Google Scholar]
- Rodríguez-Cuenca, B.; García-Cortés, S.; Ordóñez, C.; Alonso, M.C. An approach to detect and delineate street curbs from MLS 3D point cloud data. Autom. Construct. 2015, 51, 103–112. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z.; Zhao, G.; Dai, W. Hierarchical extraction of urban objects from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2015, 99, 45–57. [Google Scholar] [CrossRef]
- Wang, J.; Jin, F.X.; Lu, H.Y.; Lin, Z.M. Extraction of Building Façade Information based on Vehicular Laser Scanner. J. Shandong Univ. Sci. Technol. 2004, 23, 8–11. [Google Scholar]
- Huang, L.; Lu, X.S.; Chen, C.F. Extraction of building’s facade information from laser scanning data. Sci. Surv. Map. 2006, 31, 141–142. [Google Scholar]
- Li, B.J.; Li, Q.Q.; Shi, W.Z.; Wu, F.F. Feature extraction and modeling of urban building from vehicle-borne laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 934–939. [Google Scholar]
- Lu, X.S.; Huang, L. Grid method on building information using laser scanner data. Geomat. Inf. Wuhan Univ. 2007, 32, 852–855. [Google Scholar]
- Yang, B.; Wei, Z.; Li, Q.; Li, J. Semi-automated building facade footprint extraction from mobile LIDAR point clouds. IEEE Geosci. Remote Sens. Lett. 2013, 10, 766–770. [Google Scholar] [CrossRef]
- Singh, S.; Grewal, S.K. Role of mathematical morphology in digital image processing: A review. Int. J. Sci. Eng. Res. 2014, 2, 1–3. [Google Scholar]
- Wu, H.; Li, N.; Liu, C.; Shi, B. Airborne LIDAR data segmentation based on 3D mathematical morphology. J. Remote Sens. 2011, 6, 1189–1201. [Google Scholar]
- Hernández, J.; Marcotegui, B. Morphological segmentation of building façade images. In Proceedings of the IEEE International Conference on Image Processing, Cairo, Egypt, 7–10 November 2009; pp. 4029–4032.
- Rodríguez-Cuenca, B.; García-Cortés, S.; Ordóñez, C.; Alonso, M. Morphological operations to extract urban curbs in 3D MLS point clouds. ISPRS Int. J. Geo-Inf. 2016, 5, 93. [Google Scholar] [CrossRef]
- Serna, A.; Marcotegui, B.; Hernández, J. Segmentation of façades from urban 3D point clouds using geometrical and morphological attribute-based operators. ISPRS Int. J. Geo-Inf. 2016, 5, 6. [Google Scholar] [CrossRef]
- Serna, A.; Marcotegui, B. Urban accessibility diagnosis from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2013, 84, 23–32. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, Y.; Yevenyo, Y.; Yu, X. An improved morphological algorithm for filtering airborne LIDAR point cloud based on multi-level kriging interpolation. Remote Sens. 2016, 8, 1–16. [Google Scholar] [CrossRef]
- Mukherjee, K.; Banerjee, T.; Roychowdhury, P.; Yamane, T. Terrestrial LIDAR survey and morphological analysis to identify infiltration properties in the Tamala Limestone, western Australia. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4871–4881. [Google Scholar]
- Cao, Z.; Wu, Y. A Novel Multi-scale 3D Area morphological filtering method for airborne LIDAR building extraction. Int. J. Smart Home 2016, 10, 267–276. [Google Scholar]
- Shi, W.Z.; Li, B.; Li, Q. A method for segmentation of range image captured by vehicle-borne laser scanning based on the density of projected points. Acta Geodaetica Cartogr. Sin. 2005, 34, 96–100. [Google Scholar]
- Guan, Y.; Chen, X.; Shi, G. A robust method for fitting a plane to point clouds. J. Tongji Univ. (Nat. Sci.) 2008, 36, 981–984. [Google Scholar]
- Parape, C.D.; Premachandra, C.; Tamura, M. Optimization of structure elements for morphological hit-or-miss transform for building extraction from VHR airborne imagery in natural hazard areas. Int. J. Mach. Learn. Cybern. 2015, 6, 641–650. [Google Scholar] [CrossRef]
- Wu, X.L.; Yang, L.L.; Liang, F.; Cui, S.G. Petiole segmentation method based on multi-structure elements morphology. Appl. Mech. Mater. 2015, 734, 581–585. [Google Scholar] [CrossRef]
- Mehdisouzani, C.; Digne, J.; Audfray, N.; Lartigue, C.; Morel, J.M. Feature extraction from high-density point clouds: Toward automation of an intelligent 3D contactless digitizing strategy. Comput. Aided Des. Appl. 2010, 7, 863–874. [Google Scholar]
- Hackel, T.; Wegner, D.; Schindler, K. Fast segmentation of 3D point cloud with strongly varying density. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. 2016, III-3, 177–184. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Building Feature Points in Original Point Cloud (m) | Extracted Building Facade Feature Points (m) | Coordinate Differences (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | H | x | y | H | dx | dy | dH | |
| 1 | 538,450.77 | 76,201.90 | 41.44 | 538,450.77 | 76,201.98 | 41.40 | 0.00 | −0.08 | 0.04 |
| 2 | 538,375.36 | 76,239.66 | 38.98 | 538,375.96 | 76,239.59 | 39.50 | −0.60 | 0.06 | −0.52 |
| 3 | 538,388.44 | 76,230.80 | 36.80 | 538,389.59 | 76,232.22 | 37.70 | −1.16 | −1.42 | −0.89 |
| 4 | 538,262.76 | 76,292.79 | 38.09 | 538,262.20 | 76,291.99 | 37.70 | 0.56 | 0.80 | 0.40 |
| 5 | 538,293.03 | 76,270.01 | 19.96 | 538,292.44 | 76,269.58 | 19.50 | 0.59 | 0.43 | 0.46 |
| 6 | 538,287.53 | 76,281.12 | 19.73 | 538,286.35 | 76,279.94 | 18.70 | 1.18 | 1.18 | 1.03 |
| 7 | 538,312.67 | 76,260.06 | 24.27 | 538,312.45 | 76,260.25 | 24.46 | 0.22 | −0.19 | −0.19 |
| 8 | 538,322.84 | 76,263.37 | 30.52 | 538,321.84 | 76,263.37 | 30.80 | 1.00 | 0.00 | −0.28 |
| 9 | 538,331.24 | 76,259.51 | 37.79 | 538,331.28 | 76,259.48 | 37.77 | −0.04 | 0.03 | 0.02 |
| 10 | 538,329.95 | 76,257.24 | 37.65 | 538,329.91 | 76,257.23 | 37.90 | 0.04 | 0.01 | −0.25 |
| 11 | 538,444.49 | 76,204.95 | 33.39 | 538,445.53 | 76,204.93 | 33.80 | −1.04 | 0.02 | −0.41 |
| 12 | 538,474.52 | 76,221.89 | 18.64 | 538,474.39 | 76,221.81 | 17.77 | 0.13 | 0.08 | 0.88 |
| 13 | 538,329.68 | 76,256.80 | 37.86 | 538,329.91 | 76,257.23 | 37.70 | −0.24 | −0.43 | 0.16 |
| 14 | 538,241.81 | 76,303.07 | 21.22 | 538,241.71 | 76,303.10 | 20.40 | 0.10 | −0.04 | 0.83 |
| 15 | 538,241.26 | 76,301.94 | 38.51 | 538,241.71 | 76,303.10 | 38.30 | −0.45 | −1.17 | 0.21 |
| Average | 0.49 | 0.40 | 0.44 | ||||||
| Standard deviation | 0.66 | 0.64 | 0.55 | ||||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Hu, Q.; Wu, M.; Liu, J.; Wu, X. Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services. ISPRS Int. J. Geo-Inf. 2016, 5, 231. https://doi.org/10.3390/ijgi5120231
Li Y, Hu Q, Wu M, Liu J, Wu X. Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services. ISPRS International Journal of Geo-Information. 2016; 5(12):231. https://doi.org/10.3390/ijgi5120231
Chicago/Turabian StyleLi, Yan, Qingwu Hu, Meng Wu, Jianming Liu, and Xuan Wu. 2016. "Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services" ISPRS International Journal of Geo-Information 5, no. 12: 231. https://doi.org/10.3390/ijgi5120231
APA StyleLi, Y., Hu, Q., Wu, M., Liu, J., & Wu, X. (2016). Extraction and Simplification of Building Façade Pieces from Mobile Laser Scanner Point Clouds for 3D Street View Services. ISPRS International Journal of Geo-Information, 5(12), 231. https://doi.org/10.3390/ijgi5120231