
Discovery of Transition Rules for Cellular Automata Using Artificial Bee Colony and Particle Swarm Optimization Algorithms in Urban Growth Modeling


Abstract
:1. Introduction
2. Urban Growth Modeling by CA
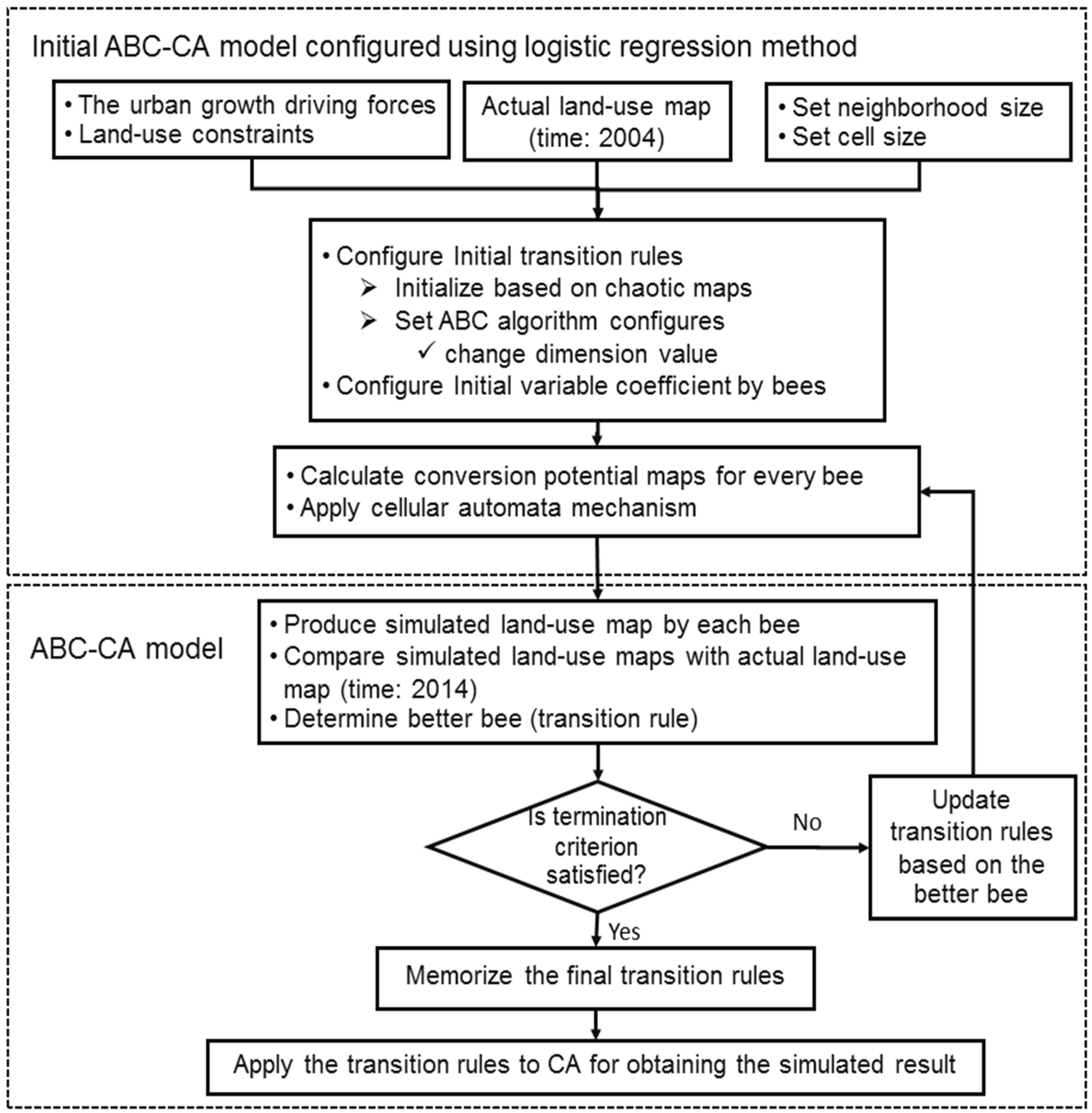
3. Artificial Bee Colony Algorithm
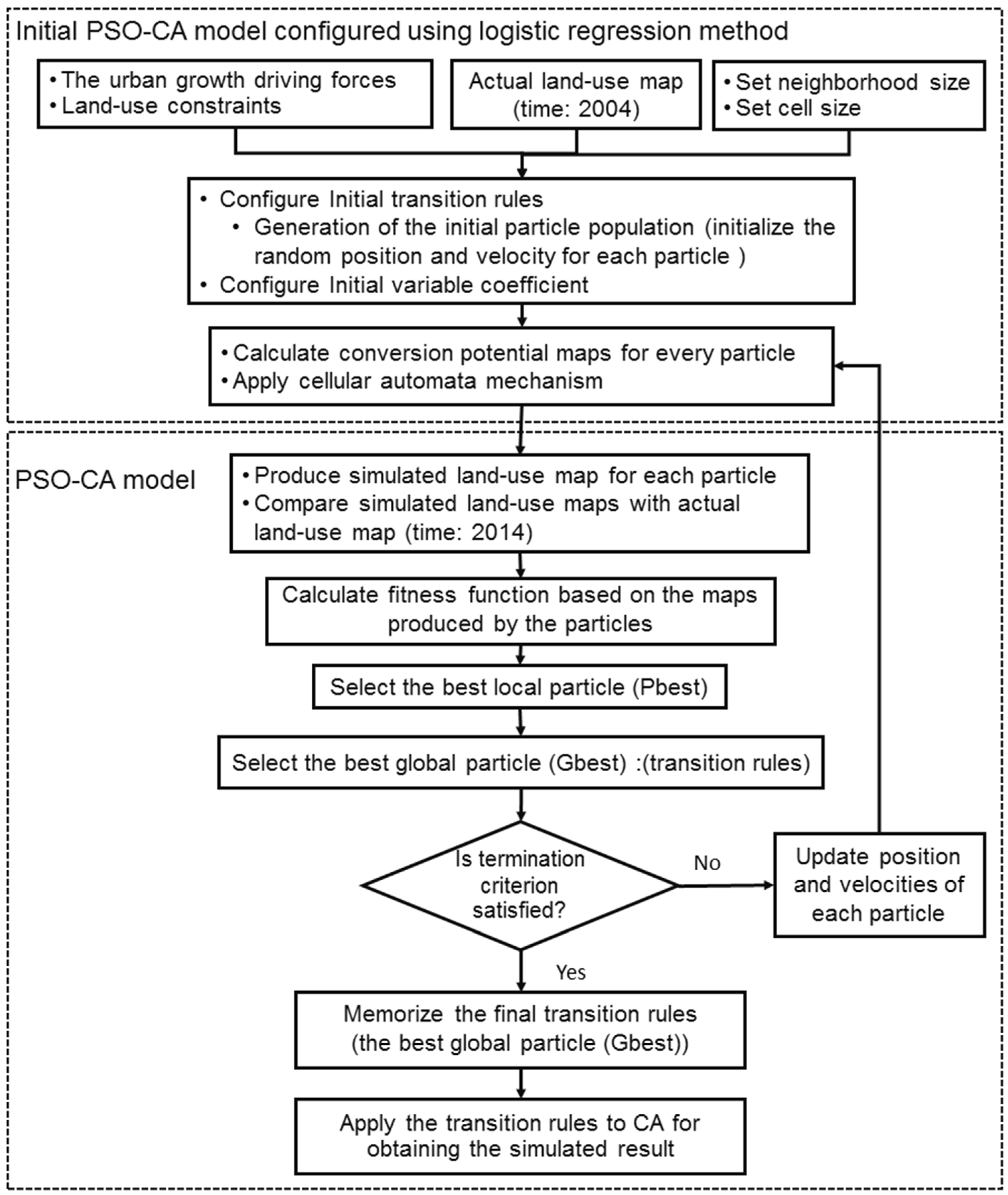
4. Particle Swarm Optimization Algorithm
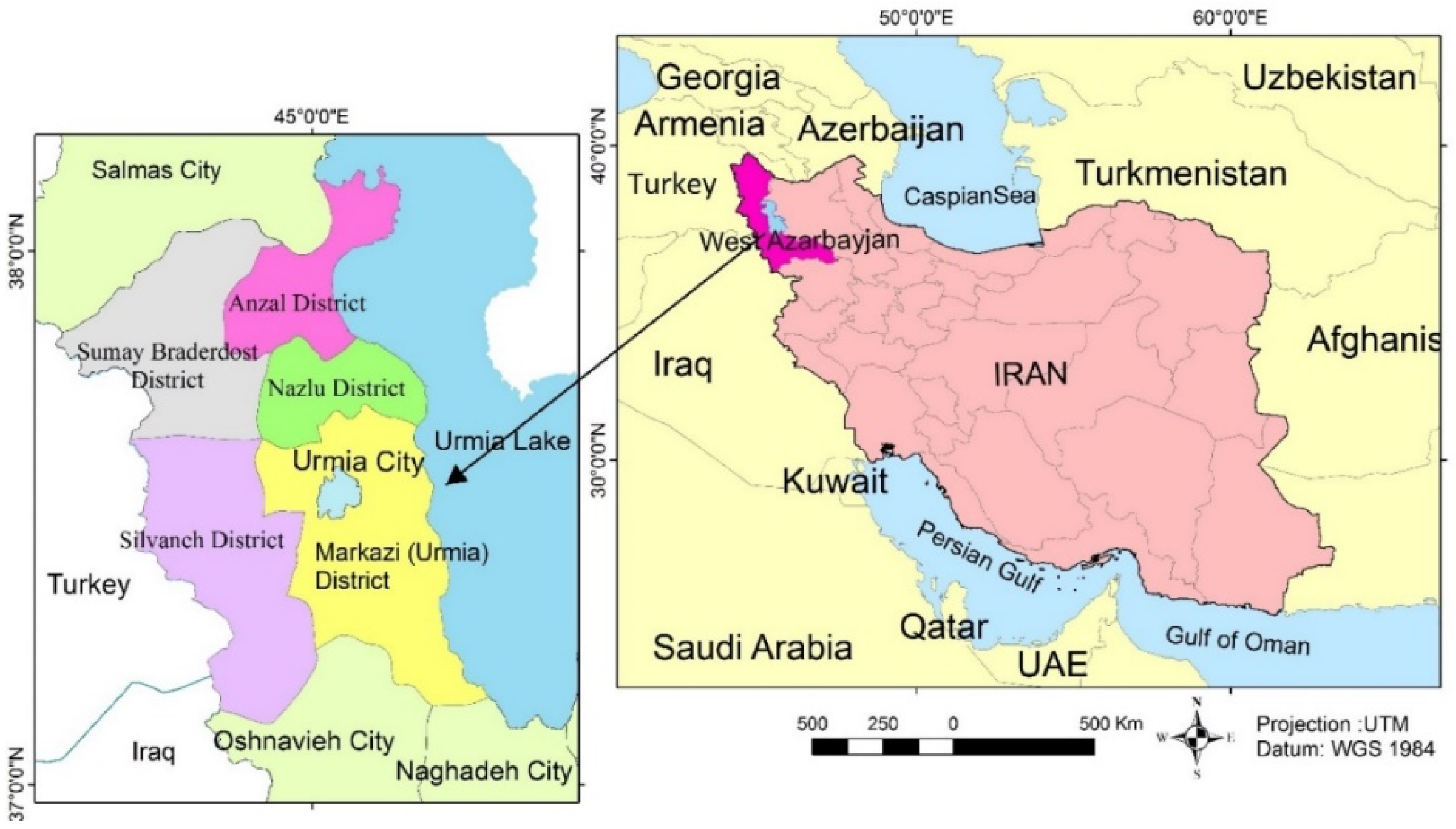
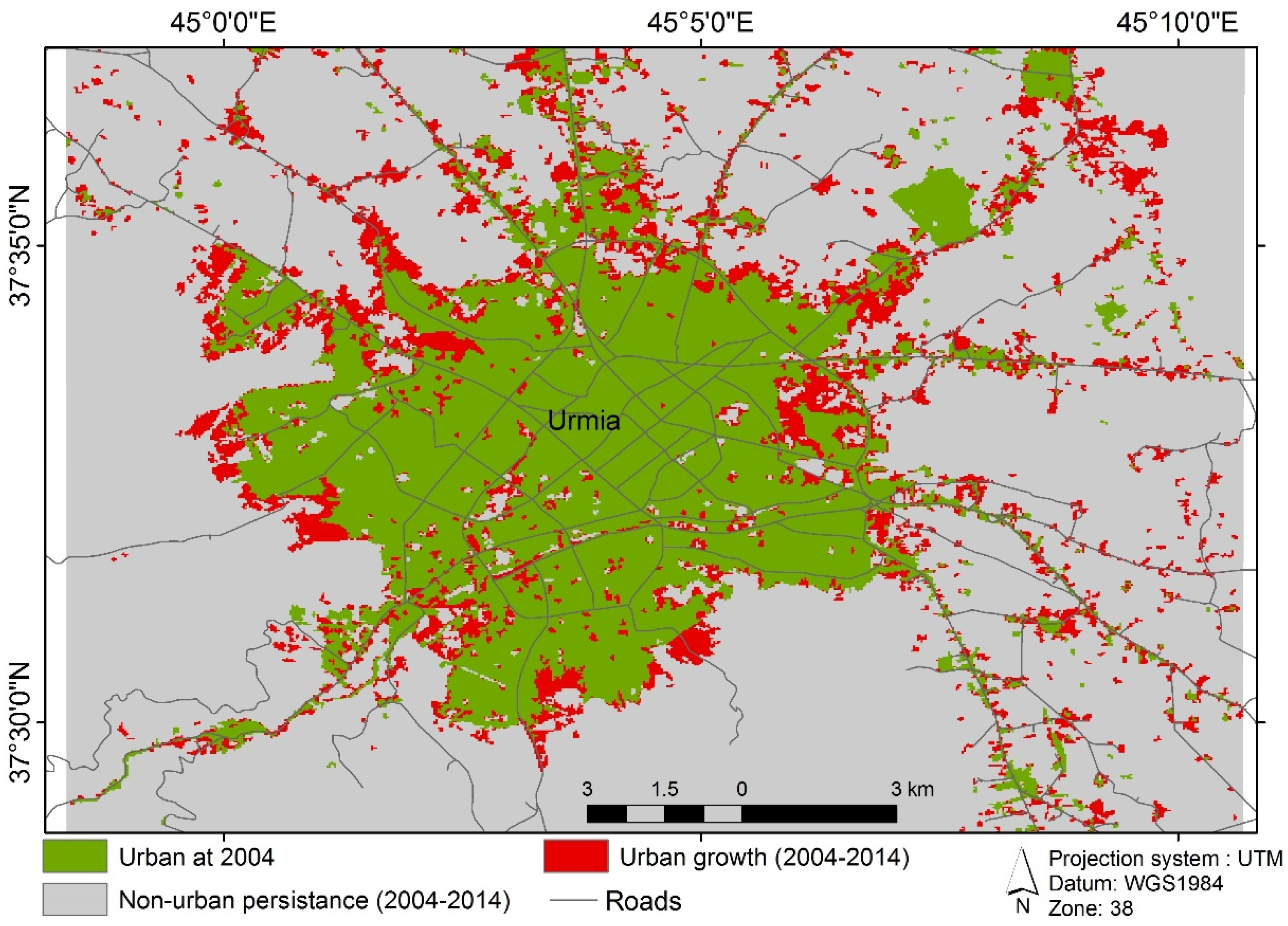
5. Study Area and Datasets
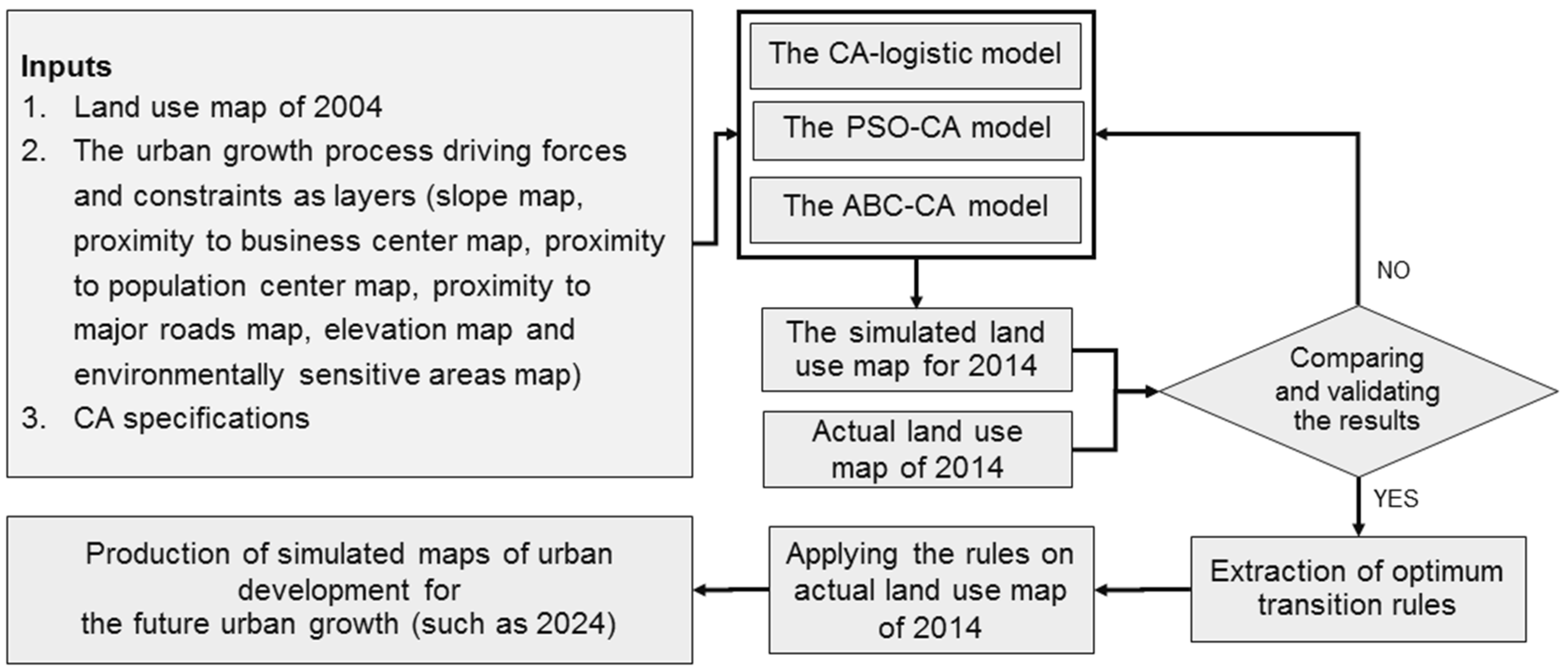
6. Implementation and Simulation Results
7. Discussion
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fragkias, M.; Boone, C.G. Towards a New Framework for Urbanization and Sustainability: Linking Urban Ecology, Environmental Justice and Global Environmental Change; Springer: New York, NY, USA, 2013. [Google Scholar]
- McKinney, M.L. Urbanization, biodiversity, and conservation. BioScience 2013, 5210, 883–890. [Google Scholar] [CrossRef]
- Tang, Z.; Engel, B.A.; Pijanowski, B.C.; Lim, K.J. Forecasting land use change and its environmental impact at a watershed scale. J. Environ. Manag. 2005, 761, 35–45. [Google Scholar] [CrossRef] [PubMed]
- Wiley, M.J.; Hyndman, D.W.; Pijanowski, B.C.; Kendall, A.D.; Riseng, C.; Rutherford, E.S.; Rediske, R.R. A multi-modeling approach to evaluating climate and land use change impacts in a Great Lakes River Basin. Hydrobiologia 2010, 6571, 243–262. [Google Scholar] [CrossRef]
- LaBeau, M.B.; Robertson, D.M.; Mayer, A.S.; Pijanowski, B.C.; Saad, D.A. Effects of future urban and biofuel crop expansions on the riverine export of phosphorus to the Laurentian Great Lakes. Ecol. Model. 2014, 277, 27–37. [Google Scholar] [CrossRef]
- Dewan, A.M.; Yamaguchi, Y.; Rahman, M.Z. Dynamics of land use/cover changes and the analysis of landscape fragmentation in Dhaka Metropolitan, Bangladesh. GeoJournal 2012, 77, 315–330. [Google Scholar] [CrossRef]
- Frumkin, H. Urban sprawl and public health. Public Health Rep. 2002, 117, 201–217. [Google Scholar] [CrossRef]
- Xu, X.; Du, Z.; Zhang, H. Integrating the system dynamic and cellular automata models to predict land use and land cover change. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 568–579. [Google Scholar] [CrossRef]
- Huang, G.; Gao, W. Simulation study on CA model based on parameter optimization of genetic algorithm and urban development. Proced. Eng. 2011, 15, 2175–2179. [Google Scholar] [CrossRef]
- Shen, Q.; Chen, Q.; Tang, B.S.; Yeung, S.; Hu, Y.; Cheung, G. A system dynamics model for the sustainable land use planning and development. Habitat Int. 2009, 33, 15–25. [Google Scholar] [CrossRef]
- Basse, R.M.; Omrani, H.; Charif, O.; Gerber, P.; Bódis, K. Land use changes modelling using advanced methods: Cellular automata and artificial neural networks. The spatial and explicit representation of land cover dynamics at the cross-border region scale. Appl. Geogr. 2014, 53, 160–171. [Google Scholar] [CrossRef]
- Batty, M.; Xie, Y.; Sun, Z. Modeling urban dynamics through GIS-based cellular automata. Comput. Environ. Urban Syst. 1999, 233, 205–233. [Google Scholar] [CrossRef]
- Guan, D.; Li, H.; Inohae, T.; Su, W.; Nagaie, T.; Hokao, K. Modeling urban land use change by the integration of cellular automaton and Markov model. Ecol. Model. 2011, 222, 3761–3772. [Google Scholar] [CrossRef]
- Brown, D.G.; Riolo, R.; Robinson, D.T.; North, M.; Rand, W. Spatial process and data models: Toward integration of agent-based models and GIS. J. Geogr. Syst. 2005, 71, 25–47. [Google Scholar] [CrossRef]
- Pijanowski, B.C.; Pithadia, S.; Shellito, B.A.; Alexandridis, K. Calibrating a neural network-based urban change model for two metropolitan areas of the Upper Midwest of the United States. Int. J. Geogr. Inf. Sci. 2005, 192, 197–215. [Google Scholar] [CrossRef]
- Tayyebi, A.; Perry, P.C.; Tayyebi, A.H. Predicting the expansion of an urban boundary using spatial logistic regression and hybrid raster–vector routines with remote sensing and GIS. Int. J. Geogr. Inf. Sci. 2014, 28, 639–659. [Google Scholar] [CrossRef]
- Dewan, A.M.; Yamaguchi, Y. Land use and land cover change in Greater Dhaka, Bangladesh: Using remote sensing to promote sustainable urbanization. Appl. Geogr. 2009, 29, 390–401. [Google Scholar] [CrossRef]
- Mahboob, M.A.; Atif, I.; Iqbal, J. Remote sensing and GIS applications for assessment of urban sprawl in Karachi, Pakistan. Sci. Tech. Dev. 2015, 34, 179–188. [Google Scholar] [CrossRef]
- Wu, Q.; Li, H.; Wang, R.; Paulussen, J.; He, Y.; Wang, M.; Wang, B.; Wang, Z. Monitoring and predicting land use change in Beijing using remote sensing and GIS. Landsc. Urban Plan. 2006, 78, 322–333. [Google Scholar] [CrossRef]
- Alsharif, A.A.; Pradhan, B. Urban sprawl analysis of Tripoli Metropolitan City (Libya) using remote sensing data and multivariate logistic regression model. J. Indian Soc. Remote Sens. 2014, 42, 149–163. [Google Scholar] [CrossRef]
- Store, R.; Kangas, J. Integrating spatial multi-criteria evaluation and expert knowledge for GIS-based habitat suitability modeling. Landsc. Urban Plan. 2001, 55, 79–93. [Google Scholar] [CrossRef]
- Wu, F.; Webster, C.J. Simulation of land development through the integration of cellular automata and multicriteria evaluation. Environ. Plan. B Plan. Des. 1998, 25, 103–126. [Google Scholar] [CrossRef]
- Wu, F. Calibration of stochastic cellular automata: The application to rural-urban land conversions. Int. J. Geogr. Inf. Sci. 2002, 16, 795–818. [Google Scholar] [CrossRef]
- Riccioli, F.; El Asmar, T.; El Asmar, J.P.; Fratini, R. Use of cellular automata in the study of variables involved in land use changes. Environ. Monit. Assess. 2013, 185, 5361–5374. [Google Scholar] [CrossRef] [PubMed]
- Pijanowski, B.C.; Brown, D.G.; Shellito, B.A.; Manik, G.A. Using neural networks and GIS to forecast land use changes: A land transformation model. Comput. Environ. Urban Syst. 2002, 266, 553–575. [Google Scholar] [CrossRef]
- Tayyebi, A.; Pijanowski, B.C.; Tayyebi, A.H. An urban growth boundary model using neural networks, GIS and radial parameterization: An application to Tehran, Iran. Landsc. Urban Plan. 2011, 100, 35–44. [Google Scholar] [CrossRef]
- Tayyebi, A.; Pijanowski, B.C. Modeling multiple land use changes using ANN, CART and MARS: Comparing tradeoffs in goodness of fit and explanatory power of data mining tools. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 102–116. [Google Scholar] [CrossRef]
- Tayyebi, A.; Pijanowski, B.C.; Linderman, M.; Gratton, C. Comparing three global parametric and local non-parametric models to simulate land use change in diverse areas of the world. Environ. Model. Softw. 2014, 59, 202–221. [Google Scholar] [CrossRef]
- Grekousis, G.; Manetos, P.; Photis, Y.N. Modeling urban evolution using neural networks, fuzzy logic and GIS: The case of the Athens metropolitan area. Cities 2013, 30, 193–203. [Google Scholar] [CrossRef]
- Riccioli, F.; El Asmar, T.; El Asmar, J.P.; Fagarazzi, C.; Casini, L. Artificial neural network for multifunctional areas. Environ. Monit. Assess. 2016. [Google Scholar] [CrossRef] [PubMed]
- Triantakonstantis, D.; Stathakis, D. Urban growth pre- diction in Athens, Greece, using Artificial Neural Networks. Int. J. Civ. Environ. Struct. Construct. Architect. Eng. 2015, 9, 234–238. [Google Scholar]
- Huang, B.; Xie, C.; Tay, R.; Wu, B. Land-use-change modeling using unbalanced support-vector machines. Environ. Plan. B Plan Des. 2009, 36, 398–416. [Google Scholar] [CrossRef]
- Tang, J.; Wang, L.; Yao, Z. Spatio-temporal urban landscape change analysis using the Markov chain model and a modified genetic algorithm. Int. J. Remote Sens. 2007, 28, 3255–3271. [Google Scholar] [CrossRef]
- Batty, M. Cities and Complexity: Understanding Cities with Cellular Automata, Agent-Based Models, and Fractals; The MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Feng, Y.; Liu, Y.; Tong, X.; Liu, M.; Deng, S. Modeling dynamic urban growth using cellular automata and particle swarm optimization rules. Landsc. Urban Plan. 2011, 102, 188–196. [Google Scholar] [CrossRef]
- Clarke, K.C.; Gaydos, L.J. Loose-coupling a cellular automaton model and GIS: Long-term urban growth prediction for San Francisco and Washington/Baltimore. Int. J. Geogr. Inf. Sci. 1998, 127, 699–714. [Google Scholar] [CrossRef] [PubMed]
- Shafizadeh, M.; Helbich, M. Spatiotemporal urbanization processes in the megacity of Mumbai, India: A Markov chains-cellular automata urban growth model. Appl. Geogr. 2013, 40, 140–149. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Helbich, M.; Kainz, W.; Boloorani, A.D. Integration of logistic regression, Markov chain and cellular automata models to simulate urban expansion. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 265–275. [Google Scholar] [CrossRef]
- Corner, R.J.; Dewan, A.M.; Chakma, S. Monitoring and prediction of land-use and land-cover (LULC) change. In Dhaka Megacity—Geospatial Perspectives on Urbanization, Environment and Health; Dewan, A.M., Corner, R.J., Eds.; Springer Geography: Berlin, Germany, 2014; pp. 75–97. [Google Scholar]
- Al-Kheder, S.; Wang, J.; Shan, J. Fuzzy inference guided cellular automata urban-growth modeling using multi-temporal satellite images. Int. J. Geogr. Inf. Sci. 2008, 22, 1271–1293. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G.O. Neural-network-based cellular automata for simulating multiple land use changes using GIS. Int. J. Geogr. Inf. Sci. 2002, 164, 323–343. [Google Scholar] [CrossRef]
- Azari, M.; Tayyebi, A.; Helbich, M.; Reveshty, M.A. Integrating cellular automata, artificial neural network, and fuzzy set theory to simulate threatened orchards: Application to Maragheh, Iran. GISci. Remote Sens. 2016, 53, 183–205. [Google Scholar] [CrossRef]
- Samardžić-Petrović, M.; Dragićević, S.; Kovačević, M.; Bajat, B. Modeling urban land use changes using support vector machines. Trans. GIS 2016, 20, 718–734. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, Y.; Pontius, R.G. Spatially-explicit simulation of urban growth through self-adaptive genetic algorithm and cellular automata modelling. Land 2014, 3, 719–738. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Liu, L.; He, J.; Ai, B. A bottom-up approach to discover transition rules of cellular automata using ant intelligence. Int. J. Geogr. Inf. Sci. 2008, 22, 1247–1269. [Google Scholar] [CrossRef]
- Cao, M.; Tang, G.A.; Shen, Q.; Wang, Y. A new discovery of transition rules for cellular automata by using cuckoo search algorithm. Int. J. Geogr. Inf. Sci. 2015, 29, 806–824. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Yeh, A.G.O.; He, J.; Tao, J. Discovery of transition rules for geographical cellular automata by using ant colony optimization. Sci. China Ser. D Earth Sci. 2007, 50, 1578–1588. [Google Scholar] [CrossRef]
- Yang, J.; Tang, G.A.; Cao, M.; Zhu, R. An intelligent method to discover transition rules for cellular automata using bee colony optimization. Int. J. Geogr. Inf. Sci. 2013, 2710, 1849–1864. [Google Scholar] [CrossRef]
- Liao, J.; Tang, L.; Shao, G.; Qiu, Q.; Wang, C.; Zheng, S.; Su, X. A neighbor decay cellular automata approach for simulating urban expansion based on particle swarm intelligence. Int. J. Geogr. Inf. Sci. 2014, 28, 720–738. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Computer Engineering Department, Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Zhang, C.; Ouyang, D.; Ning, J. An artificial bee colony approach for clustering. Exp. Syst. Appl. 2010, 37, 4761–4767. [Google Scholar] [CrossRef]
- Akay, B.; Karaboga, D. A modified artificial bee colony algorithm for real-parameter optimization. Inf. Sci. 2012, 192, 120–142. [Google Scholar] [CrossRef]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony ABC algorithm and applications. Artif. Intell. Rev. 2014, 421, 21–57. [Google Scholar] [CrossRef]
- Bolaji, A.L.; Khader, A.T.; Al-Betar, M.A.; Awadallah, M.A. Artificial bee colony algorithm, its variants and applications: A survey. J. Theor. Appl. Inf. Tech. 2013, 47, 434–459. [Google Scholar]
- Liu, Y.; Liu, D.; Liu, Y.; He, J.; Jiao, L.; Chen, Y.; Hong, X. Rural land use spatial allocation in the semiarid loess hilly area in China: Using a Particle Swarm Optimization model equipped with multi-objective optimization techniques. Sci. China Earth Sci. 2012, 55, 1166–1177. [Google Scholar] [CrossRef]
- Census Information. Available online: http://www.amar.org.ir (accessed on 20 April 2012).
- Santé, I.; García, A.M.; Miranda, D.; Crecente, R. Cellular automata models for the simulation of real-world urban processes: A review and analysis. Landsc. Urban Plan. 2010, 96, 108–122. [Google Scholar] [CrossRef]
- White, R.; Engelen, G.; Uljee, I. The use of constrained cellular automata for high-resolution modelling of urban land-use dynamics. Environ. Plan. B Plan. Des. 1997, 24, 323–343. [Google Scholar] [CrossRef]
- Chen, Y.; Li, X.; Liu, X.; Ai, B. Modeling urban land-use dynamics in a fast developing city using the modified logistic cellular automaton with a patch-based simulation strategy. Int. J. Geogr. Inf. Sci. 2014, 282, 234–255. [Google Scholar] [CrossRef]
- Cao, K.; Huang, B.; Li, M.; Li, W. Calibrating a cellular automata model for understanding rural–urban land conversion: A Pareto front-based multi-objective optimization approach. Int. J. Geogr. Inf. Sci. 2014, 28, 1028–1046. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G.O. Zoning land for agricultural protection by the integration of remote sensing, GIS, and cellular automata. Photogramm. Eng. Remote Sens. 2001, 67, 471–477. [Google Scholar]
- Lu, C.; Wu, Y.; Shen, Q.; Wang, H. Driving force of urban growth and regional planning: A case study of China’s Guangdong Province. Habitat Int. 2013, 40, 35–41. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Kumar, A.; Singh, G.K. Modified artificial bee colony based computationally efficient multilevel thresholding for satellite image segmentation using Kapur’s, Otsu and Tsallis functions. Exp. Syst. Appl. 2015, 42, 1573–1601. [Google Scholar] [CrossRef]
- Li, G.; Niu, P.; Xiao, X. Development and investigation of efficient artificial bee colony algorithm for numerical function optimization. Appl. Softw. Comput. 2012, 12, 320–332. [Google Scholar] [CrossRef]
- Biswas, S.; Chatterjee, A.; Goswami, S.K. An artificial bee colony-least square algorithm for solving harmonic estimation problems. Appl. Softw. Comput. 2013, 135, 2343–2355. [Google Scholar] [CrossRef]
- Alatas, B. Chaotic bee colony algorithms for global numerical optimization. Exp. Syst. Appl. 2010, 37, 5682–5687. [Google Scholar] [CrossRef]
- Alizadegan, A.; Asady, B.; Ahmadpour, M. Two modified versions of artificial bee colony algorithm. Appl. Math. Comput. 2013, 225, 601–609. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 5, pp. 1942–1948.
- Alatas, B.; Akin, E. Chaotically encoded particle swarm optimization algorithm and its applications. Chaos Solitons Fractals 2009, 41, 939–950. [Google Scholar] [CrossRef]
- Jiang, H.; Kwong, C.K.; Chen, Z.; Ysim, Y.C. Chaos particle swarm optimization and T–S fuzzy modeling approaches to constrained predictive control. Exp. Syst. Appl. 2012, 39, 194–201. [Google Scholar] [CrossRef]
- Sadeghpour, M.; Salarieh, H.; Vossoughi, G.; Alasty, A. Multi-variable control of chaos using PSO-based minimum entropy control. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2397–2404. [Google Scholar] [CrossRef]
- Pontius, R.G., Jr. Quantification error versus location error in comparison of categorical maps. Photogramm. Eng. Remote Sens. 2000, 66, 1011–1016. [Google Scholar]
- Pontius, R.G., Jr.; Cornell, J.D.; Hall, C.A. Modeling the spatial pattern of land-use change with GEOMOD2: Application and validation for Costa Rica. Agric. Ecosyst. Environ. 2001, 851, 191–203. [Google Scholar] [CrossRef]
- Pontius, R.G., Jr.; Schneider, L.C. Land-cover change model validation by an ROC method for the Ipswich watershed, Massachusetts, USA. Agric. Ecosyst. Environ. 2001, 851, 239–248. [Google Scholar] [CrossRef]
- Pontius, R.G., Jr.; Si, K. The total operating characteristic to measure diagnostic ability for multiple thresholds. Int. J. Geogr. Inf. Sci. 2014, 28, 570–583. [Google Scholar] [CrossRef]
- Ahmed, S.J.; Bramley, G.; Verburg, P.H. Key Driving factors influencing urban growth: Spatial-statistical modelling with Clue-s. In Dhaka Megacity—Geospatial Perspectives on Urbanization, Environment and Health; Dewan, A.M., Corner, R.J., Eds.; Springer Geography: Berlin, Germany, 2014; pp. 123–145. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
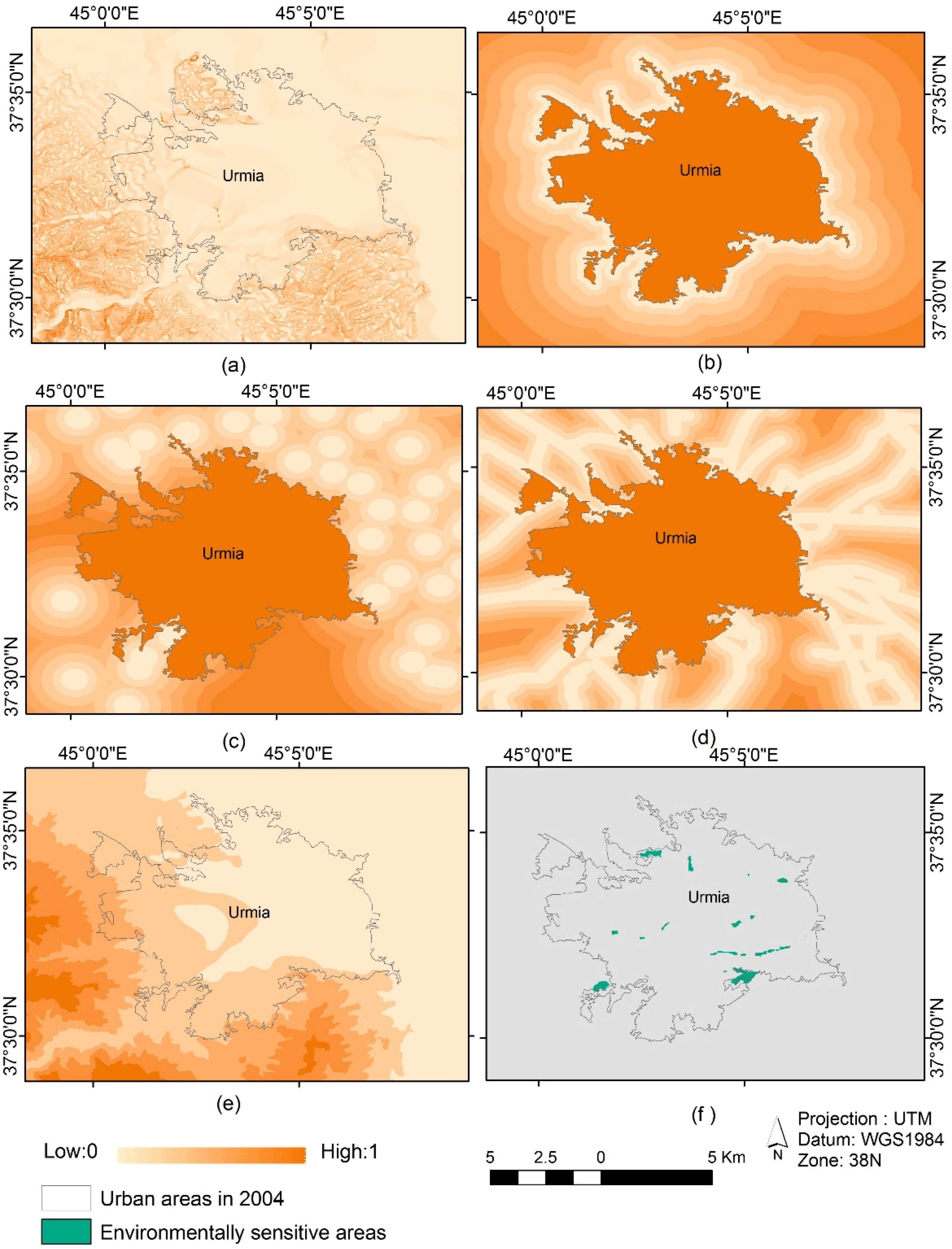
| Variables [34,49,62] | Data Sources |
|---|---|
| Land use and land cover maps | Landsat classified images, topographic map (2004 and 2014) |
| Slope and elevation maps | Topographic map (2004) |
| Distance from business center map | Topographic map and land use (2004) |
| Distance from population centers map | Topographic map (2004) |
| Distance from road networks map | Road networks (2004) |
| Environmental sensitive areas map | Environmental maps (2004) |
| If (Dist-road < 0.300 km & Dist-road > 0.100 km & Elevation > 1300 m & Elevation < 1420 m & Slope > 0% & Slope < 5% & Dist-Business_center < 1.5 km & Dist-Business_center < 0.2 km & Dist_population_center > 0.4 km & Dist_population_center < 1.5 km & Neighborhood_Info < 5), Then Probability of conversion of the cell base on Equations (3) and (4): (P = 0.571) If P > threshold Then Pixel class = urban else pixel class = non-urban End if |
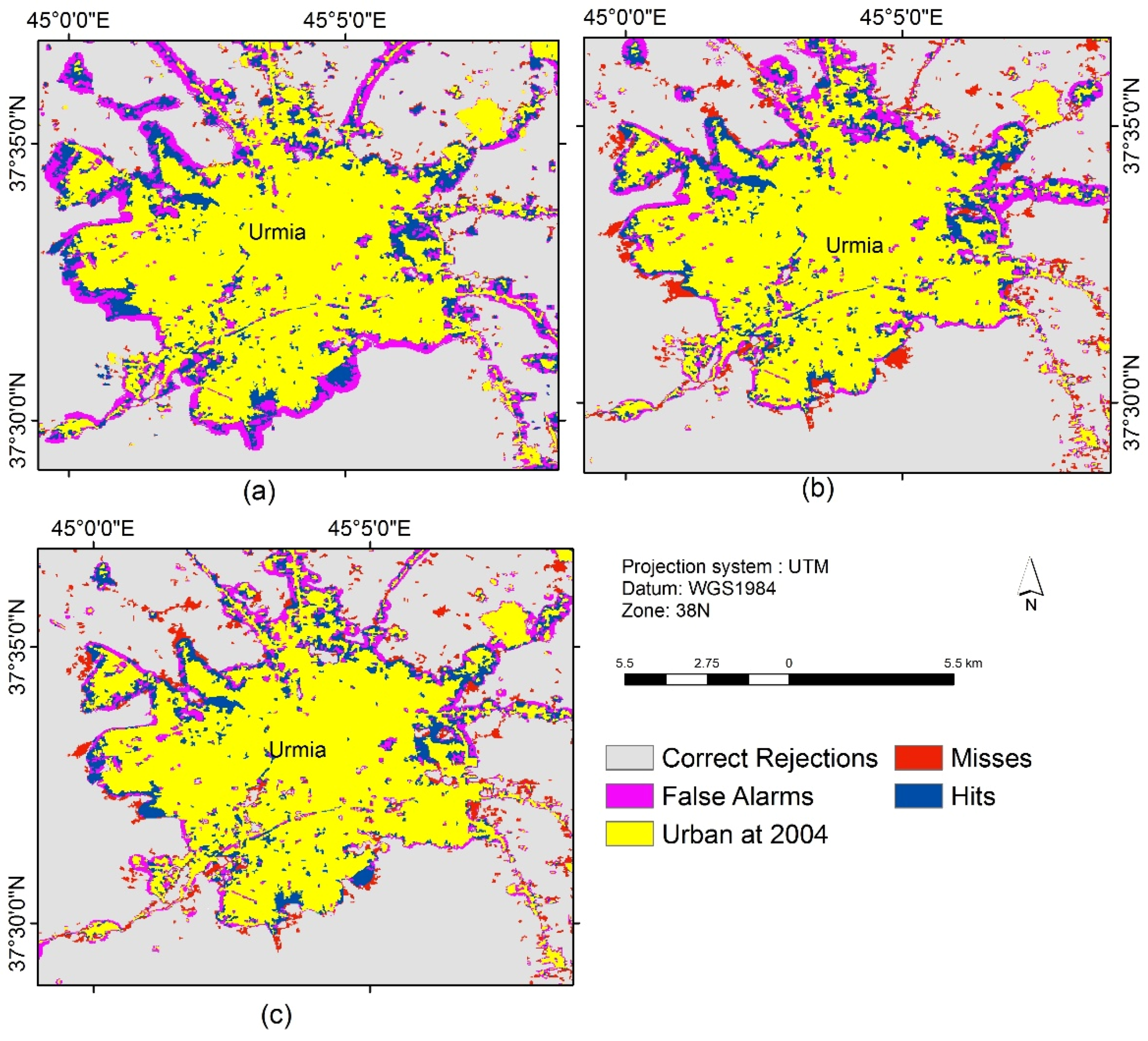
| Reference | ||||
|---|---|---|---|---|
| Change | Persistence | Total (Producer Accuracy) | ||
| Simulated results | Change | H | F | H + F |
| Persistence | M | CR | M + CR | |
| Total (user accuracy) | H + M | F + CR | H + F + M + CR | |
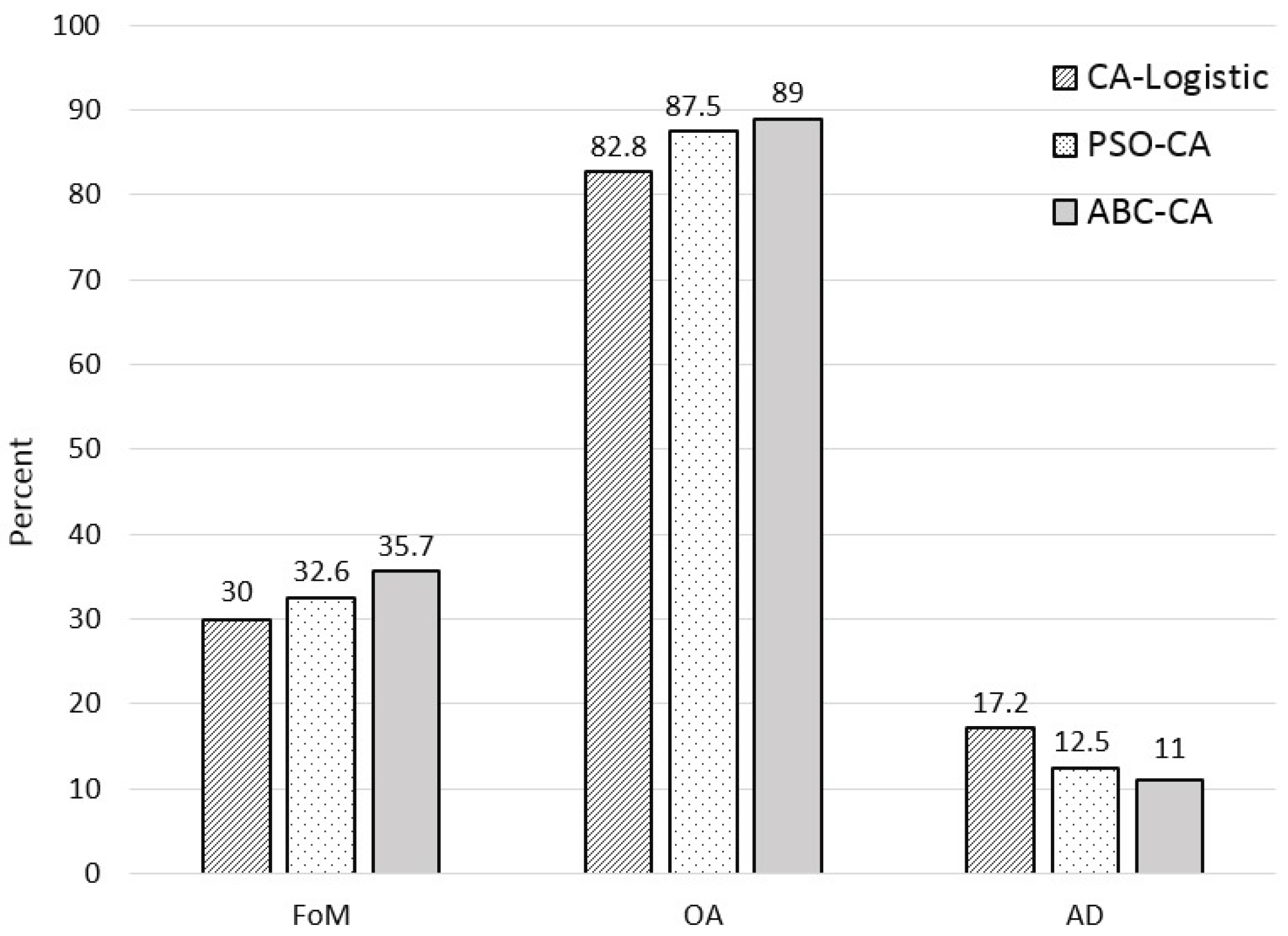
| Validation Method | Prediction Approach | ||
|---|---|---|---|
| CA-Logistic | PSO-CA | ABC-CA | |
| Overall accuracy (%) | 82.8 | 87.5 | 89 |
| Figure of merit (%) | 30 | 32.6 | 35.7 |
| False alarms (%) | 15.1 | 7.7 | 6.2 |
| Misses (%) | 2.1 | 4.8 | 4.8 |
| Allocation disagreement (%) | 17.2 | 12.5 | 11 |
| Correctly predicted unchanged cells (%) | 75.4 | 81.4 | 82.9 |
| Protection of agricultural areas from urbanization (%) | 62.2 | 68.6 | 74.1 |
| Areas of the simulated gain of the urban lands in 2004–2014 (the actual gain area of the city is 2500 hectares) (hectares) | 4960 | 3155 | 2824 |
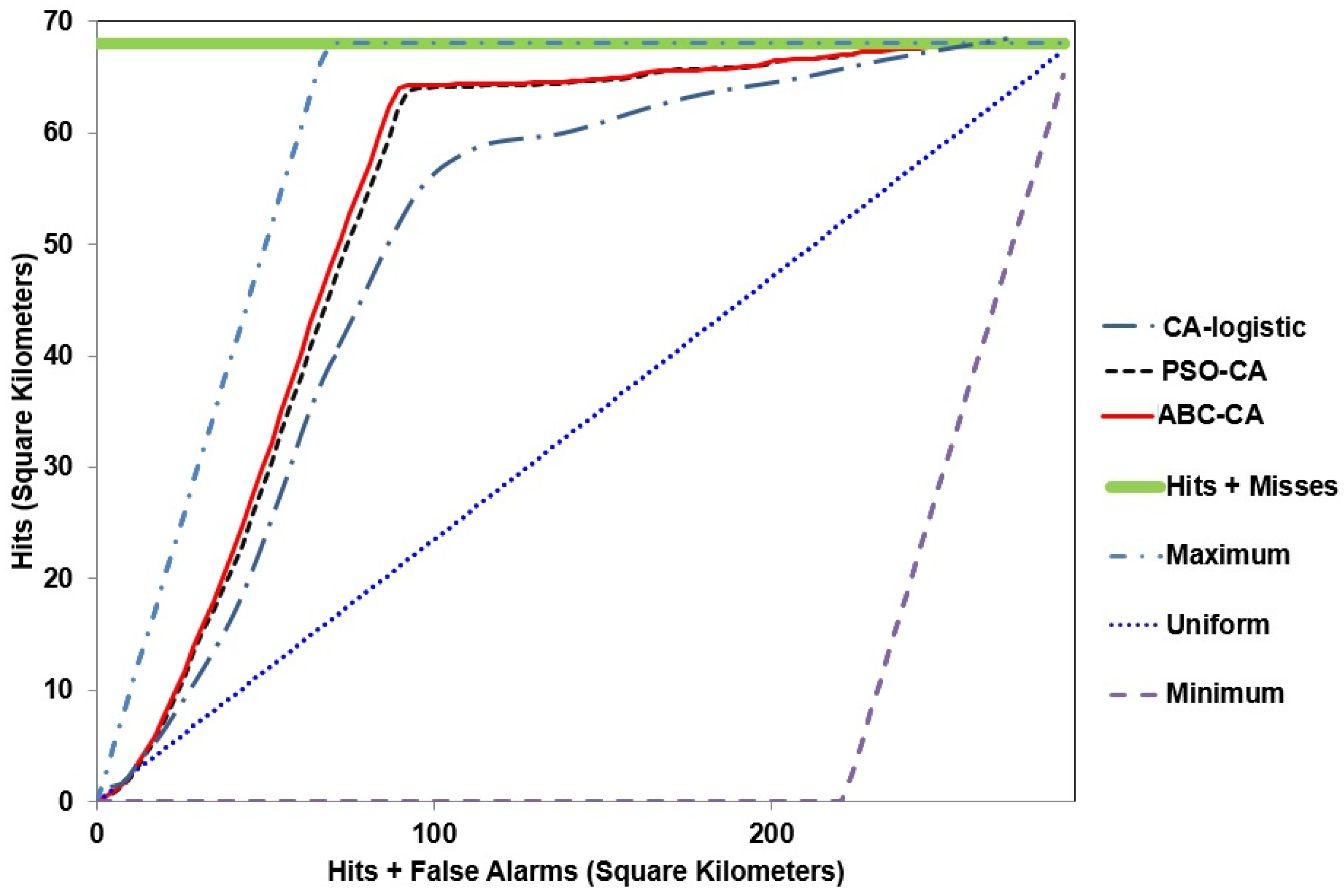
| TOC (closeness to maximum boundary) | low | medium | high |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naghibi, F.; Delavar, M.R. Discovery of Transition Rules for Cellular Automata Using Artificial Bee Colony and Particle Swarm Optimization Algorithms in Urban Growth Modeling. ISPRS Int. J. Geo-Inf. 2016, 5, 241. https://doi.org/10.3390/ijgi5120241
Naghibi F, Delavar MR. Discovery of Transition Rules for Cellular Automata Using Artificial Bee Colony and Particle Swarm Optimization Algorithms in Urban Growth Modeling. ISPRS International Journal of Geo-Information. 2016; 5(12):241. https://doi.org/10.3390/ijgi5120241
Chicago/Turabian StyleNaghibi, Fereydoun, and Mahmoud Reza Delavar. 2016. "Discovery of Transition Rules for Cellular Automata Using Artificial Bee Colony and Particle Swarm Optimization Algorithms in Urban Growth Modeling" ISPRS International Journal of Geo-Information 5, no. 12: 241. https://doi.org/10.3390/ijgi5120241
APA StyleNaghibi, F., & Delavar, M. R. (2016). Discovery of Transition Rules for Cellular Automata Using Artificial Bee Colony and Particle Swarm Optimization Algorithms in Urban Growth Modeling. ISPRS International Journal of Geo-Information, 5(12), 241. https://doi.org/10.3390/ijgi5120241