
Bayesian Fusion of Multi-Scale Detectors for Road Extraction from SAR Images


Abstract
:1. Introduction
1.1. SAR and Road Network Extraction
1.2. Problems and Motivation
1.3. Contribution and Structure
- (1)
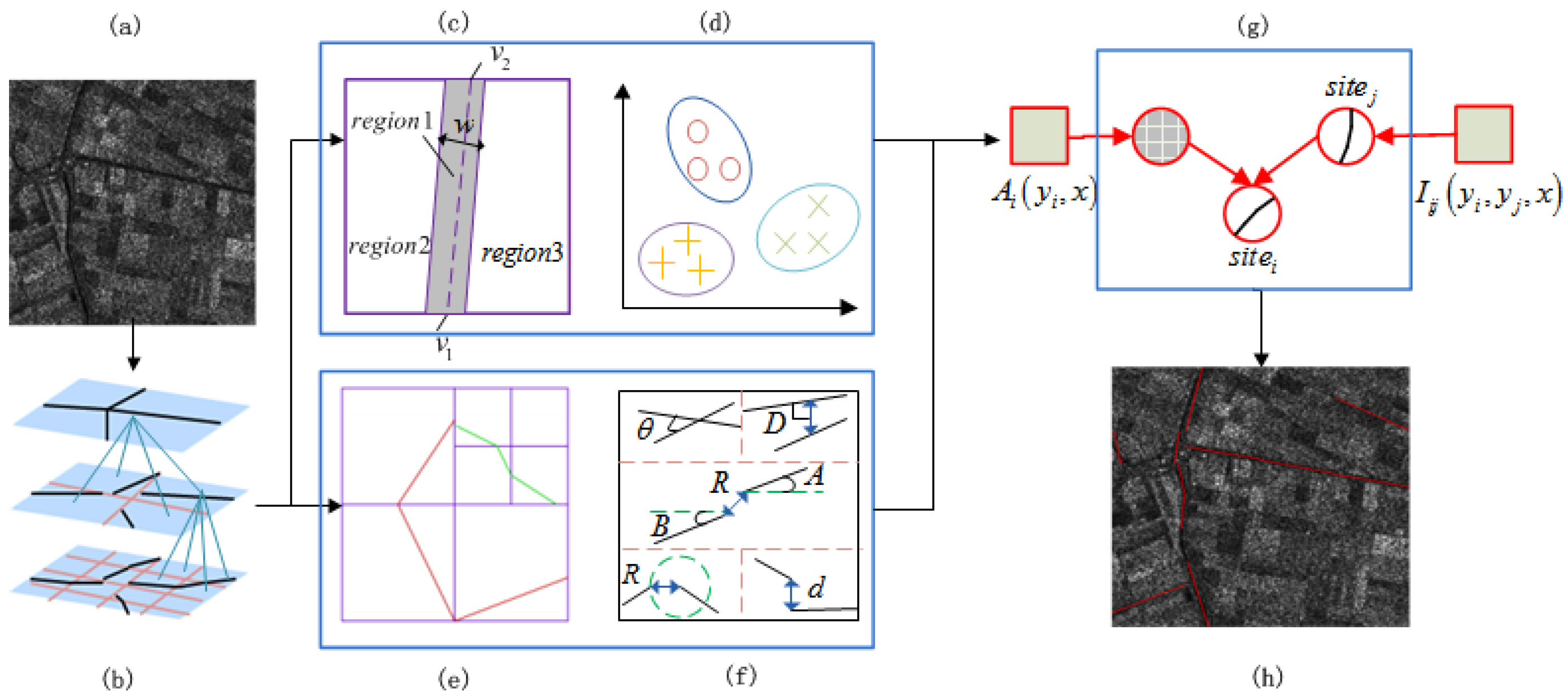
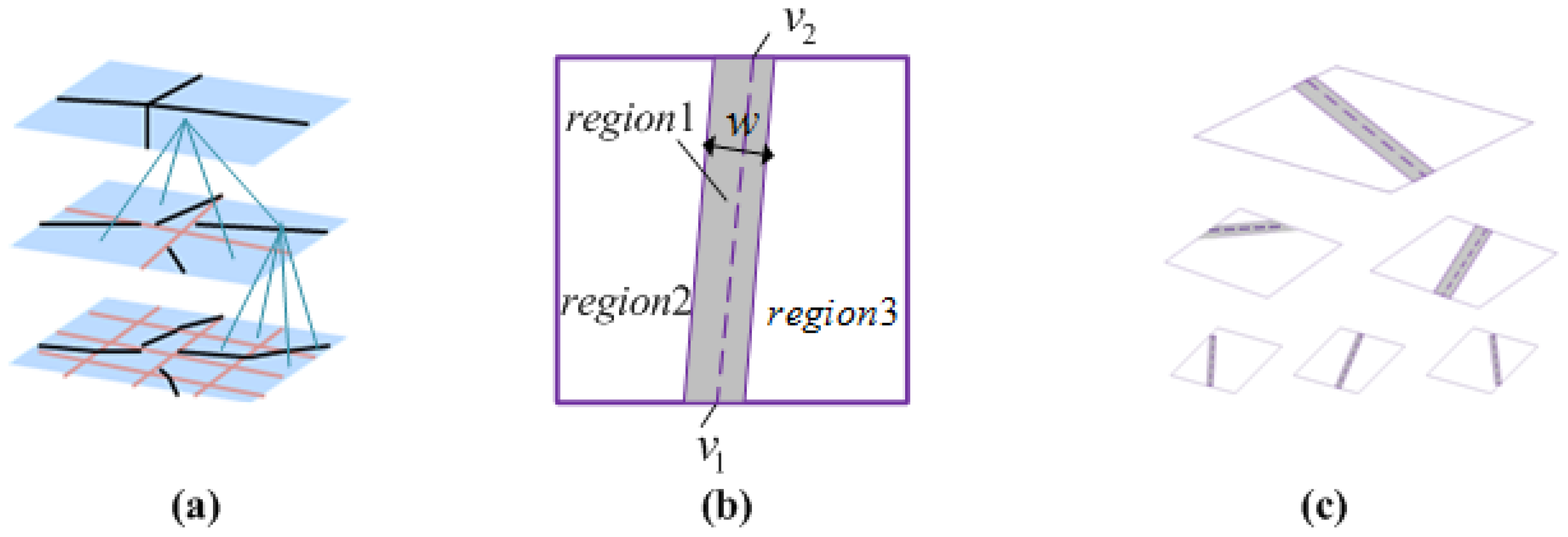
- A multi-scale analysis is introduced to construct image pyramids on the data of each look, in which each image is partitioned into a sequence of dyadic squares at each level.
- (2)
- Based on our previous work, multi-scale operators are used to obtain the likelihood and prior constraints in CRF: for the unary potential, a detector called the multi-scale linear feature detector (MLFD) computes the maximum responses of road segments in dyadic squares at different scales.
- (3)
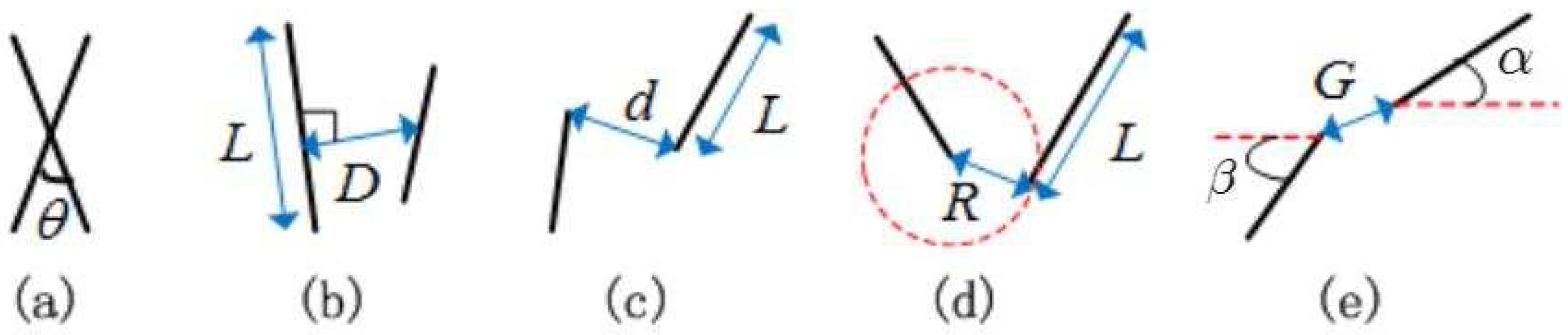
- For the pairwise potential in the CRF, five constrained relationships, including distances and crossing angles between adjacent segments, are obtained under a beamlet framework, and several truncated linear functions are elaborately designed to avoid over-smoothing.
2. Bayesian Framework
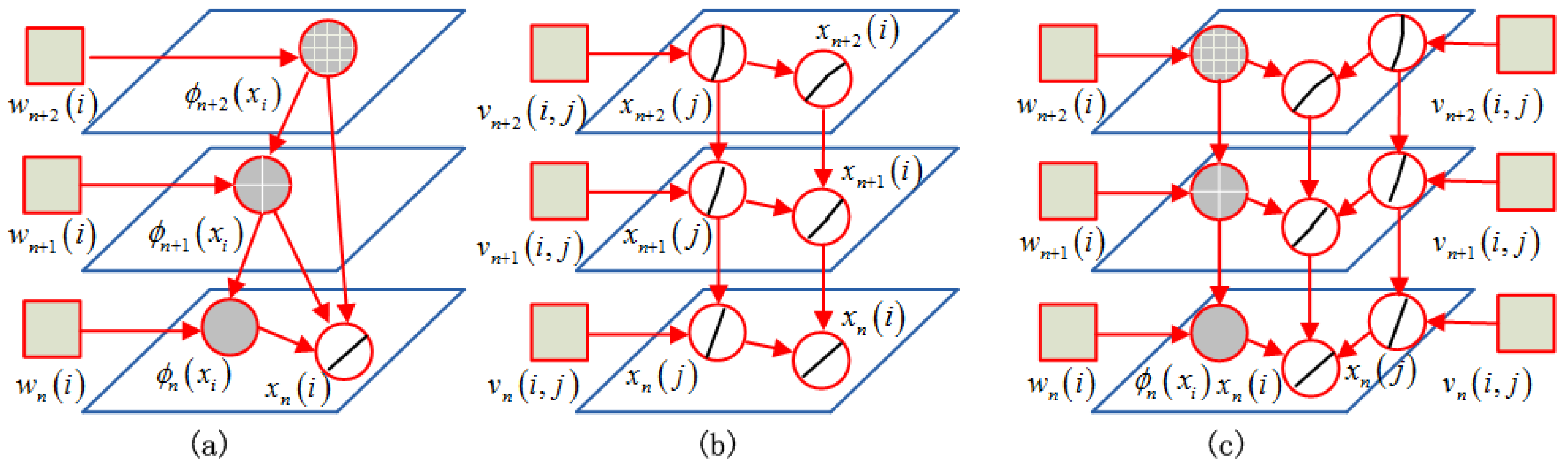
2.1. CRF Model
2.2. CRF Reasoning for Road Extraction
3. Unary Potential in Our CRF Model
3.1. Likelihood Information from the MLFD
3.2. Unary Potential Term
4. Pairwise Potential in Our CRF Model
4.1. Prior Constraints under Beamlet Analysis
4.2. Pairwise Potential Term
5. Post Processing
5.1. The Complete Posterior Distribution of CRF
5.2. Normalization Methods
6. Experiments and Results
6.1. Experimental Data and Settings
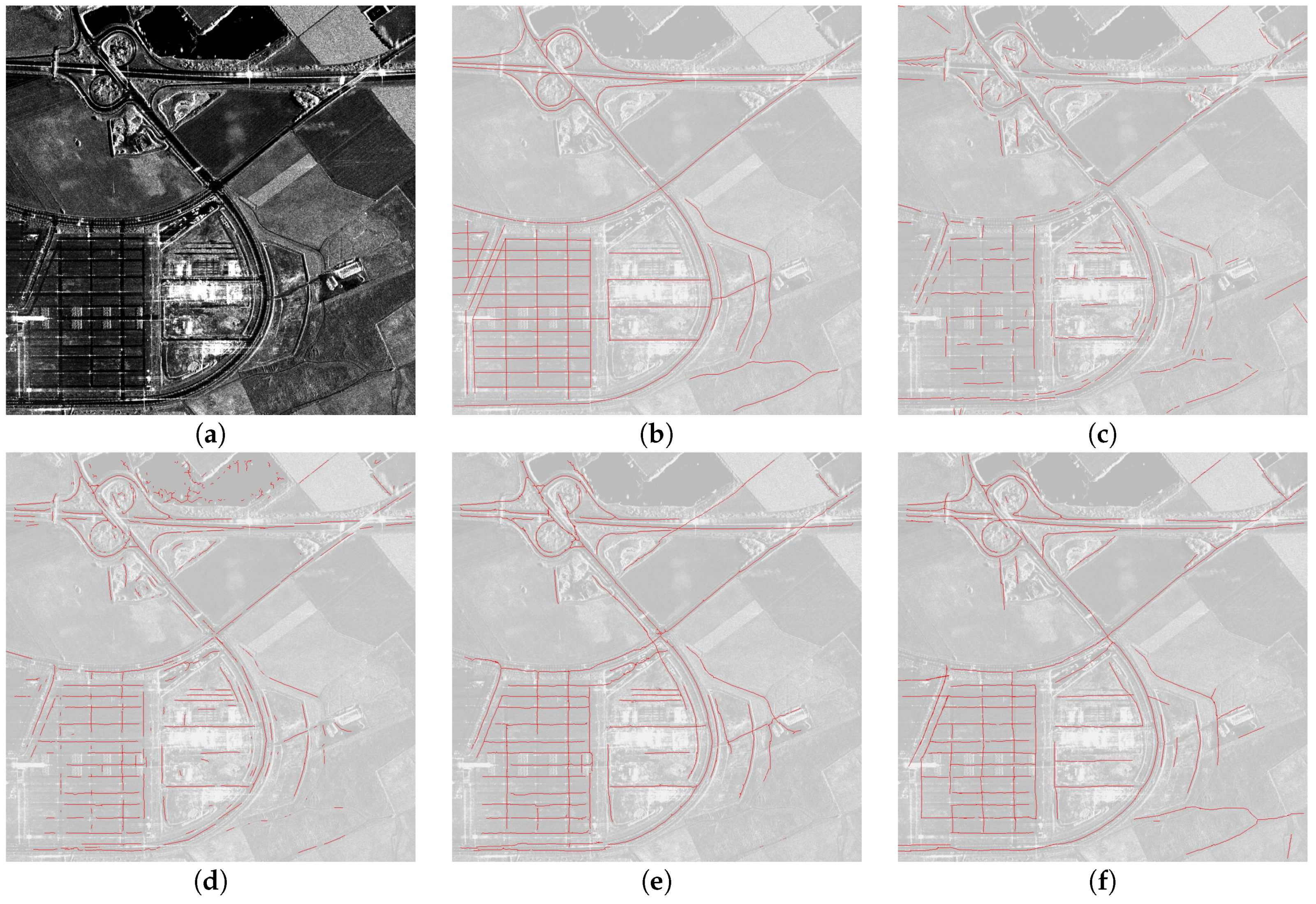
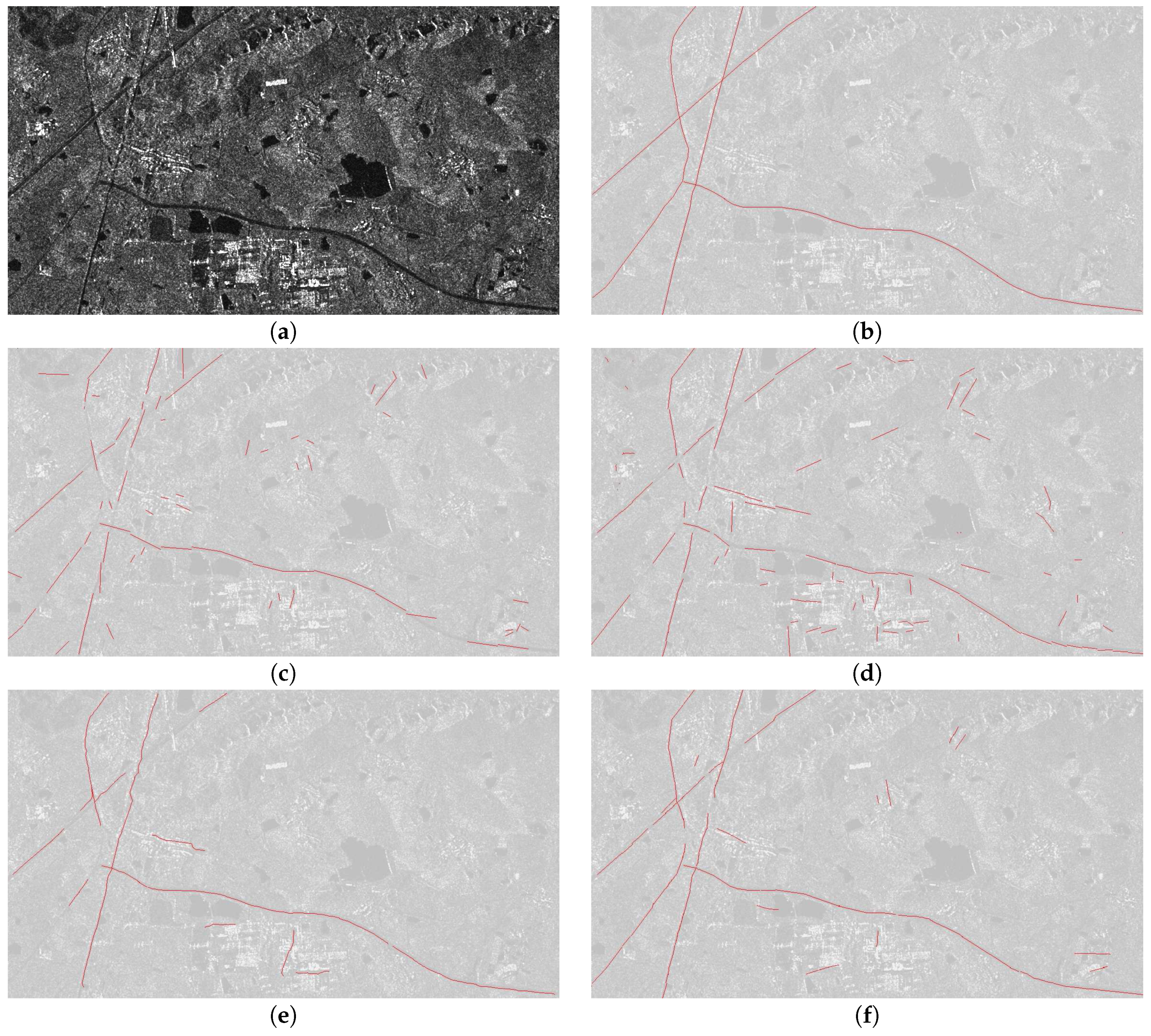
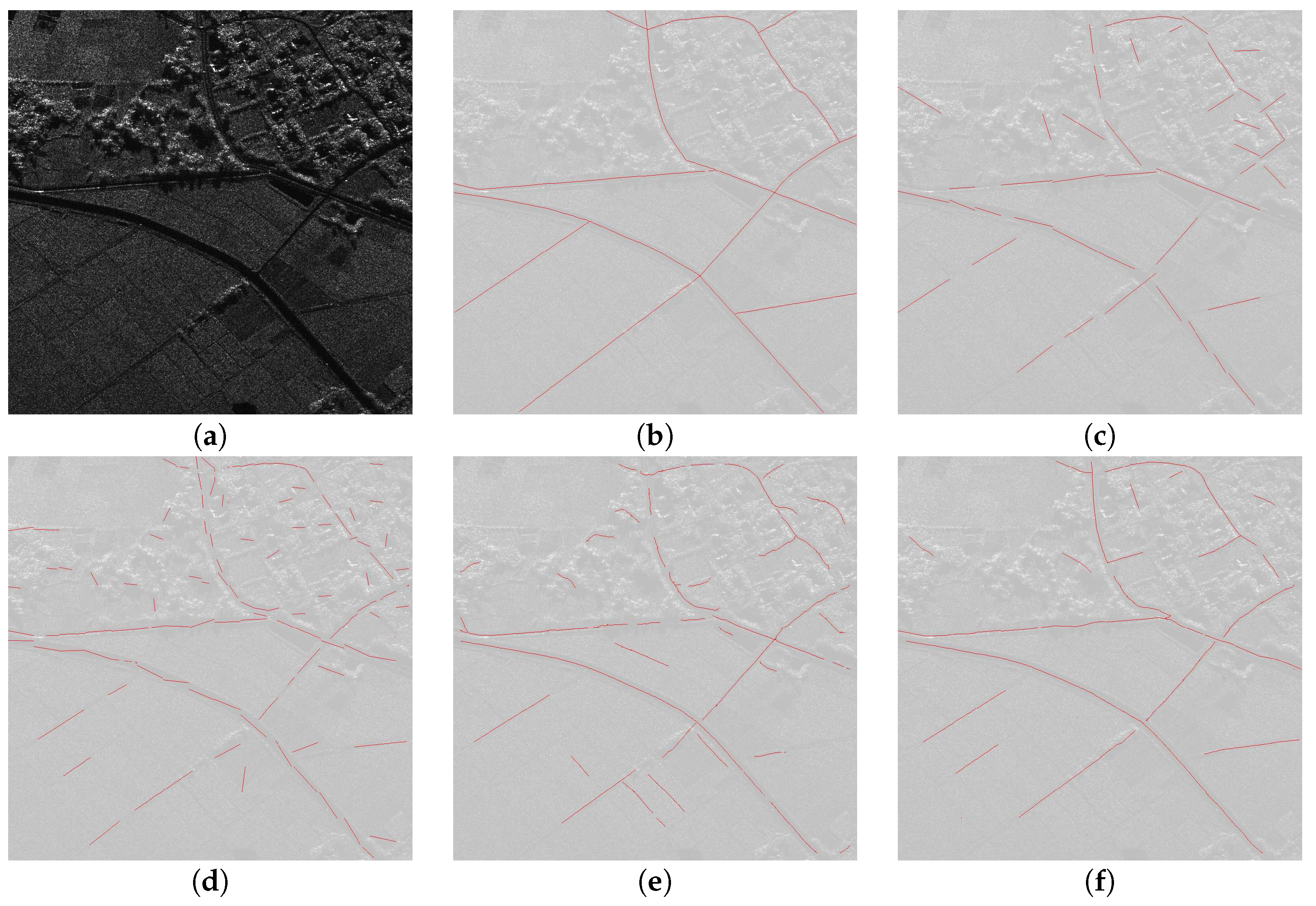
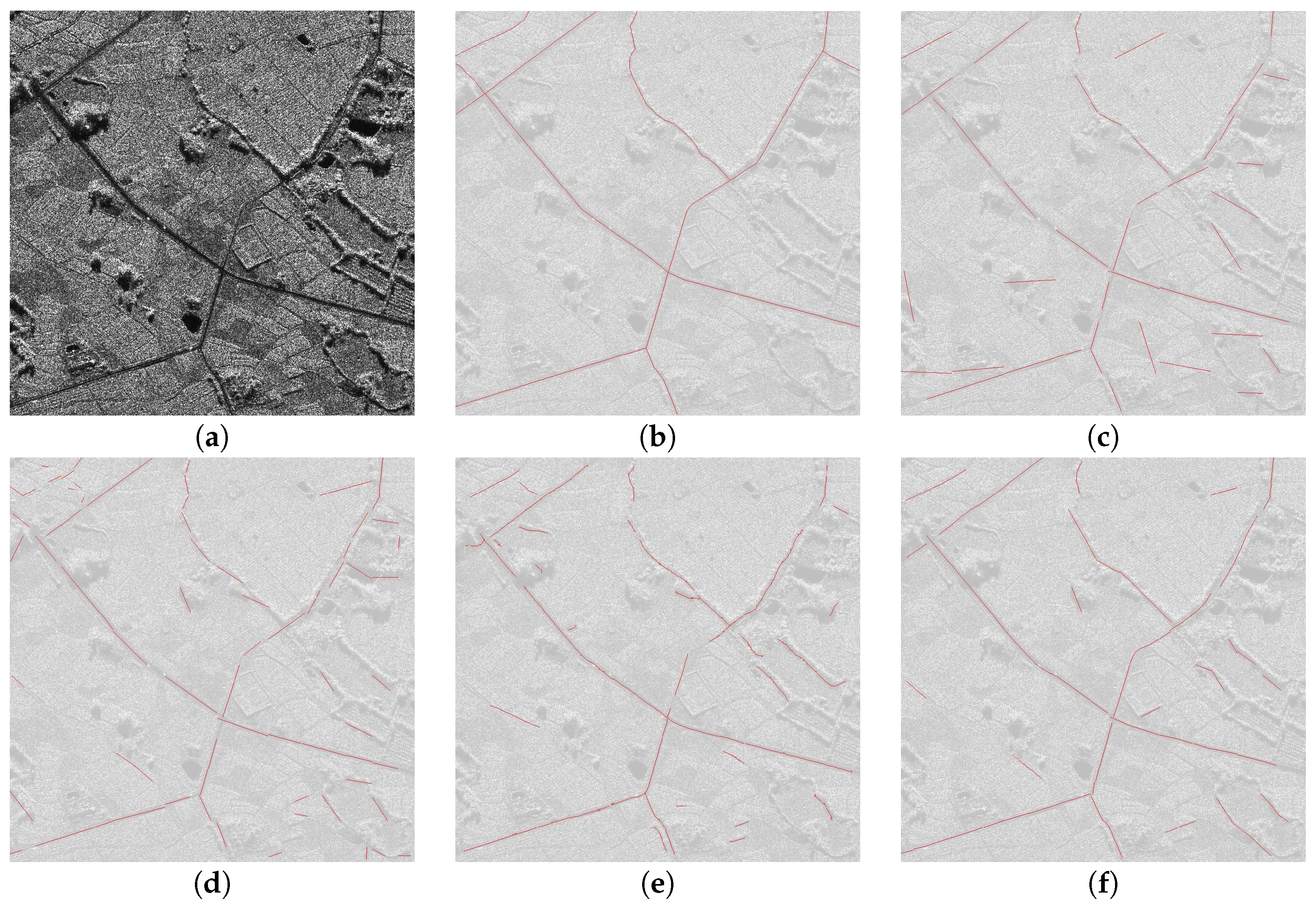
6.2. Experimental Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- He, C.; Li, S.; Liao, Z.X.; Liao, M.S. Texture classification of PolSAR data based on sparse coding of wavelet polarization textons. IEEE Trans. Geosci. Remote Sens. 2013, 8, 4576–4590. [Google Scholar] [CrossRef]
- Cheng, J.; Gao, G.; Ku, Y.; Sun, J.Y. Review of road network extraction from SAR images. J. Image Graph. 2013, 18, 11–23. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Chanussot, J.; Mauris, G.; Lambert, P. Fuzzy fusion techniques for linear features detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1292–1305. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A statistical and geometrical edge detector for SAR images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Stoica, R.; Descombes, X.; Zerubia, J. A Gibbs point process for road extraction from remotely sensed images. Int. J. Comput. Vis. 2004, 57, 121–136. [Google Scholar] [CrossRef]
- Negri, M.; Gamba, P.; Lisini, G.; Tupin, F. Junction-aware extraction and regularization of urban road networks in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2962–2971. [Google Scholar] [CrossRef]
- Tupin, F.; Maitre, H.; Mangin, J.; Nicolas, J.; Pechersky, E. Detection of linear features in SAR images: Application to road network extraction. IEEE Trans. Geosci. Remote Sens. 1998, 36, 434–453. [Google Scholar] [CrossRef]
- Wegner, J.; Hansch, R.; Thiele, A.; Soergel, U. Building Detection From One Orthophoto and High-Resolution InSAR Data Using Conditional Random Fields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 83–91. [Google Scholar] [CrossRef]
- He, X.; Zemel, R.; Carreira, M. Multiscale conditional random fields for image labeling. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004.
- Huang, Z.; Xu, F.; Lu, L.; Nie, H. Object-based conditional random fields for road extraction from remote sensing image. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2014; p. 012276. [Google Scholar]
- He, C.; Shi, B.; Zhang, Y.; Su, X.; Yang, W.; Xu, X. The algorithm of building area extraction based on boundary prior and conditional random field for SAR image. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 1321–1324.
- Wegner, J.; Montoya-Zegarra, J.; Schindler, K. A higher-order CRF model for road network extraction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1698–1705.
- He, C.; Liao, Z.; Yang, F.; Deng, X.; Liao, M. A novel linear feature detector for SAR images. Eurasip J. Adv. Signal Process. 2012, 2012, 1–9. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Liao, Z.; Yang, F.; Deng, X. Road Extraction From SAR Imagery Based on Multiscale Geometric Analysis of Detector Responses. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1373–1382. [Google Scholar]
- Donoho, D. Wedgelets: Nearly minimax estimation of edges. Ann. Stat. 1999, 27, 859–897. [Google Scholar] [CrossRef]
- Donoho, D.; Levi, O.; Starck, J.; Martinez, V. Multiscale geometric analysis for 3d catalogs. In Astronomical Telescopes and Instrumentation; International Society for Optics and Photonics: Waikoloa, HI, USA, 2002; pp. 101–111. [Google Scholar]
- Dong, X.; Zhang, Y. SAR Image Reconstruction From Undersampled Raw Data Using Maximum A Posteriori Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1651–1664. [Google Scholar] [CrossRef]
- Borghys, D.; Lacroix, V.; Perneel, C. Edge and line detection in polarimetric SAR images. In Proceedings of the International Conference On Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; pp. 921–924.
- Kumar, S.; Hebert, M. Discriminative random fields. Int. J. Comput. Vis. 2006, 68, 179–201. [Google Scholar] [CrossRef]
- Donoho, D.; Huo, X. Beamlets and multiscale image analysis. In Multiscale and Multiresolution Methods; Springer: Berlin, Germany, 2002; pp. 149–196. [Google Scholar]
- Jeon, B.; Jang, J.; Hong, K. Road detection in spaceborne SAR images using a genetic algorithm. IEEE Trans. Geosci. Remote Sens. 2002, 40, 22–29. [Google Scholar] [CrossRef]
- Wiedemann, C.; Ebner, H. Automatic completion and evaluation of road networks. Int. Arch. Photogramm. Remote Sens. 2000, 33, 979–986. [Google Scholar]
- Li, S.Z. Markov Random Field Modeling in Image Analysis; Springer Science & Business Media: New York, NY, USA, 2009; pp. 30–31. [Google Scholar]
- Gould, S.; Russakovsky, O.; Goodfellow, I.; Baumstarck, P.; Ng, A.; Koller, D. The STAIR Vision Library. Available online: http://ai.stanford.edu/ sgould/svl (accessed on 22 October 2016).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Methods | Correctness | Completeness | Quality | Time Cost |
|---|---|---|---|---|---|
| Figure 5 | MLFD | 0.6341 | 0.4262 | 0.3692 | 5.7 |
| beamlet | 0.6791 | 0.6092 | 0.4730 | 6.4 | |
| MRF | 0.7311 | 0.7107 | 0.5635 | 4.9 | |
| CRF | 0.7658 | 0.7495 | 0.6097 | 10.2 | |
| Figure 6 | MLFD | 0.6747 | 0.7271 | 0.5384 | 4.1 |
| beamlet | 0.5358 | 0.6821 | 0.4590 | 4.6 | |
| MRF | 0.7288 | 0.8196 | 0.6614 | 3.2 | |
| CRF | 0.7744 | 0.8978 | 0.7117 | 8.4 | |
| Figure 7 | MLFD | 0.6725 | 0.5674 | 0.4446 | 4.7 |
| beamlet | 0.5799 | 0.6199 | 0.4278 | 5.3 | |
| MRF | 0.7256 | 0.7982 | 0.6048 | 4.1 | |
| CRF | 0.7534 | 0.7719 | 0.7157 | 12.3 | |
| Figure 8 | MLFD | 0.5823 | 0.6824 | 0.4581 | 5.1 |
| beamlet | 0.6452 | 0.7440 | 0.5280 | 5.6 | |
| MRF | 0.7697 | 0.7856 | 0.6397 | 4.7 | |
| CRF | 0.7952 | 0.8056 | 0.7279 | 13.4 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, R.; He, C.; Liu, X.; Chen, D.; Qin, Q. Bayesian Fusion of Multi-Scale Detectors for Road Extraction from SAR Images. ISPRS Int. J. Geo-Inf. 2017, 6, 26. https://doi.org/10.3390/ijgi6010026
Xu R, He C, Liu X, Chen D, Qin Q. Bayesian Fusion of Multi-Scale Detectors for Road Extraction from SAR Images. ISPRS International Journal of Geo-Information. 2017; 6(1):26. https://doi.org/10.3390/ijgi6010026
Chicago/Turabian StyleXu, Rui, Chu He, Xinlong Liu, Dong Chen, and Qianqing Qin. 2017. "Bayesian Fusion of Multi-Scale Detectors for Road Extraction from SAR Images" ISPRS International Journal of Geo-Information 6, no. 1: 26. https://doi.org/10.3390/ijgi6010026
APA StyleXu, R., He, C., Liu, X., Chen, D., & Qin, Q. (2017). Bayesian Fusion of Multi-Scale Detectors for Road Extraction from SAR Images. ISPRS International Journal of Geo-Information, 6(1), 26. https://doi.org/10.3390/ijgi6010026