Urban Growth Modeling and Future Scenario Projection Using Cellular Automata (CA) Models and the R Package Optimx

Abstract
:1. Introduction
2. Methods
2.1. A Prototype CA Model and the Fitness Function
- ▪
- and indicate the cell’s state i at time steps t and t + 1, respectively. Three states (Urban, Non-urban and Water) are allowed;
- ▪
- is the predicted overall land transition probability, taking into account all effects;
- ▪
- Pthd is a pre-defined threshold determining if the cell i can transform its state or not;
- ▪
- NHi denotes the effect of neighboring cells on the central cell in processing;
- ▪
- Con denotes the spatially and non-spatially constrained conditions to cell conversion, e.g., protected land and broad water bodies [10]; and
- ▪
- denotes the predicted land transition probability through analyzing the relationships between urban growth and its driving factors.
2.2. Metaheuristics in the R Package Optimx
- Nelder-Mead, also known as downhill simplex, is a practical, derivative-free global search approach to find the optimum of pre-defined fitness functions [40]. The metaheuristic relies heavily on difference vectors between potential solutions with the positional bias inherent in the simplex, which expands and shrinks to adapt to the present fitness value [40]. Nelder-Mead determines the direction between the best and worst points to find nonstationary optimal points that satisfy the convergence conditions. This optimizer is suitable to resolve non-differential fitness functions that project the CA transition rules into the algorithms.
- BFGS is a quasi-Newton method for solving unconstrained nonlinear optimization problems [41] such as the minimization of RMSE in CA transition rules. In contrast to the Nelder-Mead’s downhill strategy, BFGS applies hill-climbing optimization technique to search for a stationary point in the fitness function. One merit of BFGS is that it has self-correcting ability and superlinear convergence in optimization problems [42]. BFGS does guarantee the convergence for twice continuously differentiable functions [43], but it yields good performance for non-smooth optimization of fitness functions.
- NLMINB is a box-constrained Newton method that uses port routines, similar to an adaptive nonlinear least-squares algorithm [44], to solve the problems of minimizing nonlinear functions [45]. The metaheuristic evaluates the gradient of the fitness function to return a possible solution vector as the starting point. The NLMINB optimizer included in R has been demonstrated as suitable to resolve the fitness function in CA transition rules [46].
- CG is an iterative gradient algorithm that solves optimization problems and partial differential optimization equations with a symmetric, positive-definite matrix [47]. It directly searches for an exact solution with specific iterations smaller than the matrix size. CG does not require matrix storage and therefore converges quickly [48]. We applied this metaheuristic to search the CA parameters by minimizing the RMSE of the transition rules.
- SPG is an efficient gradient method for solving constrained problems using gradient vectors as a search direction in large-scale optimization. This metaheuristic selects a step length related to the spectrum of the underlying local Hessian in the fitness function [49]. By projecting an arbitrary vector onto the feasible solution set, SPG efficiently optimizes the fitness function. Using gradient vectors is usually more effective as a search direction for large-scale optimization. Modelers need not understand complex linear codes and extra linear algebra when using the SPG algorithm [49].
2.3. Model Assessment Methods
3. Model Application
3.1. Study Area and Datasets
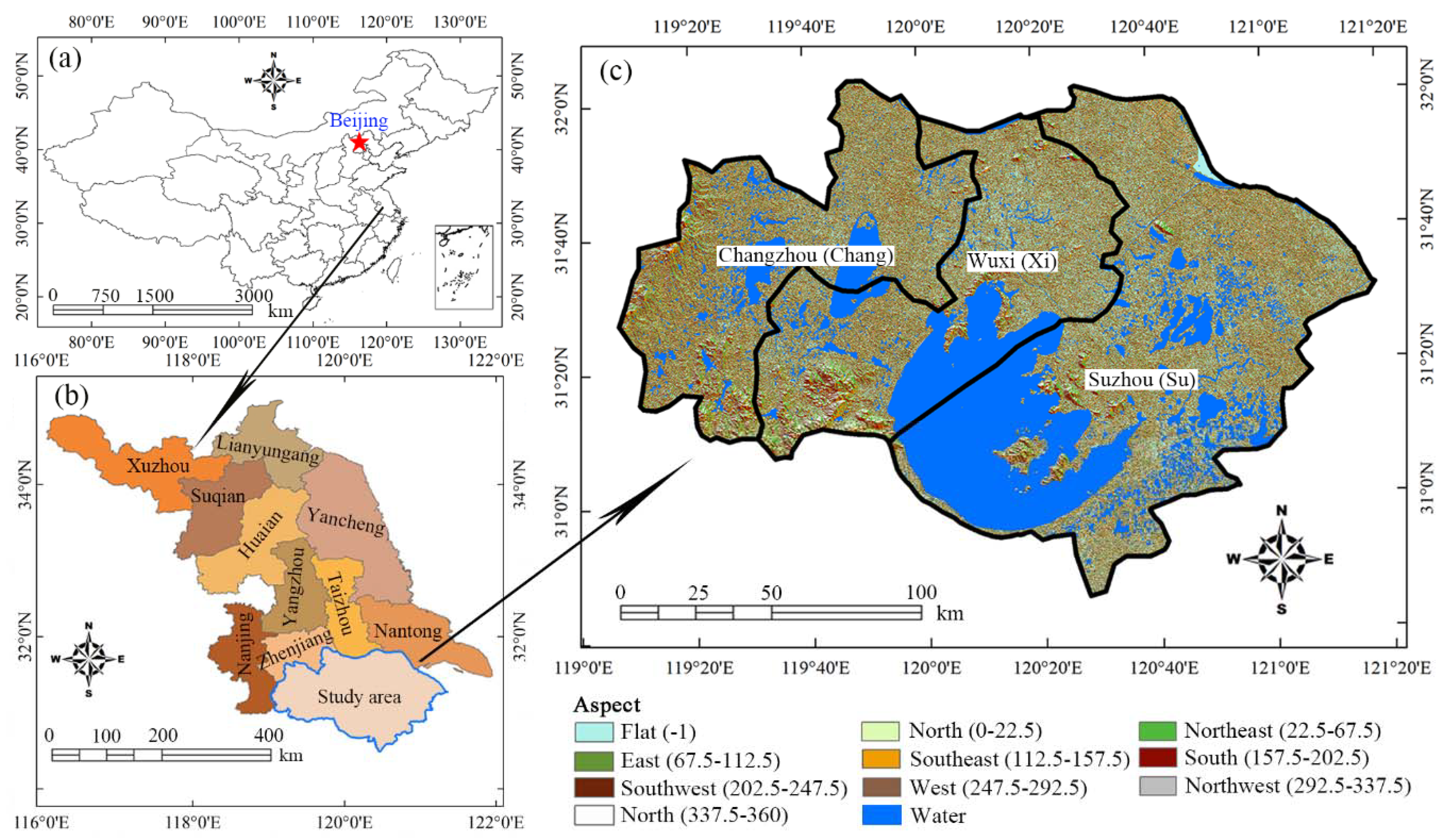
3.1.1. Study Area
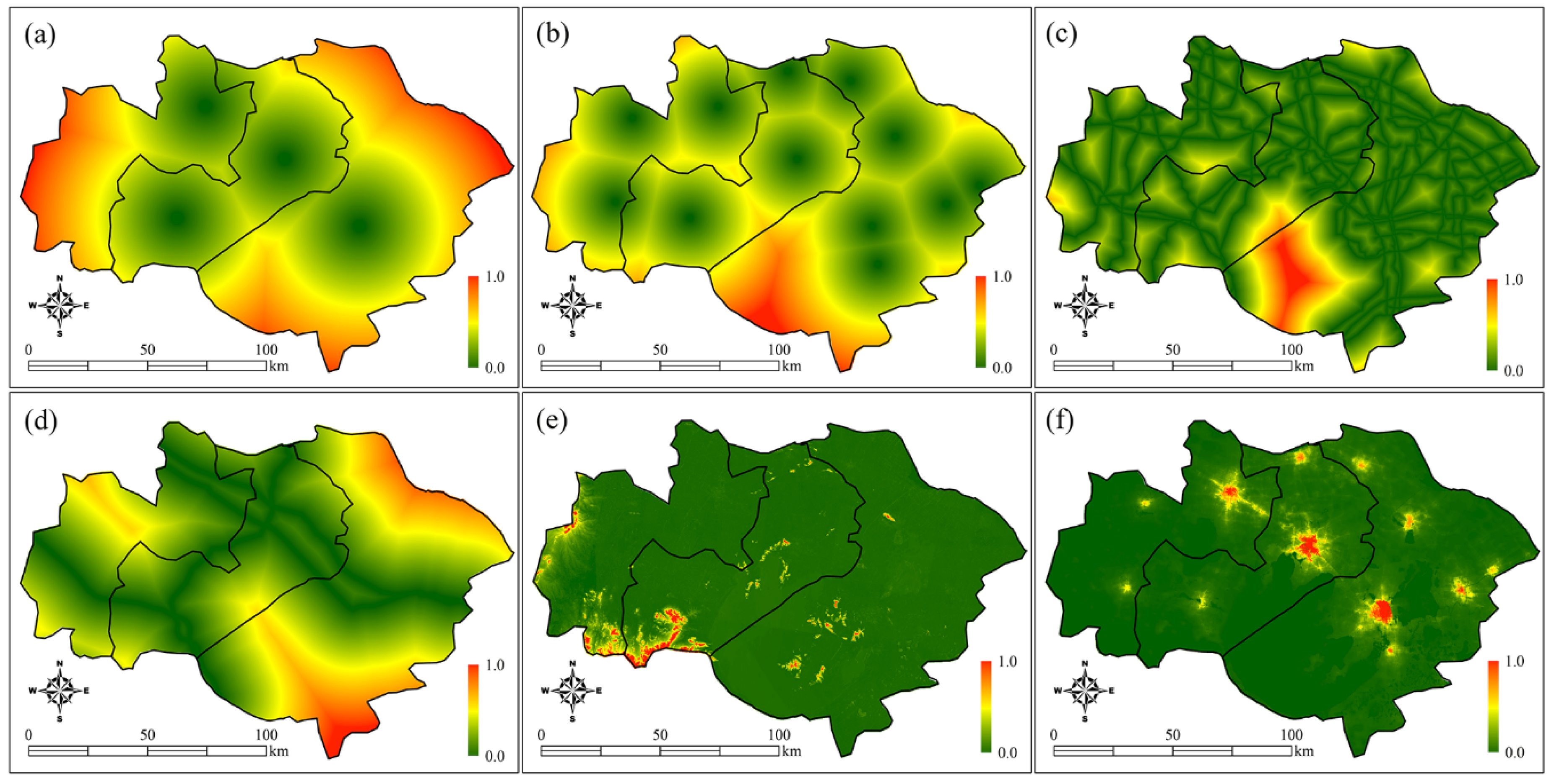
3.1.2. Factors and Data Sources
3.2. Results
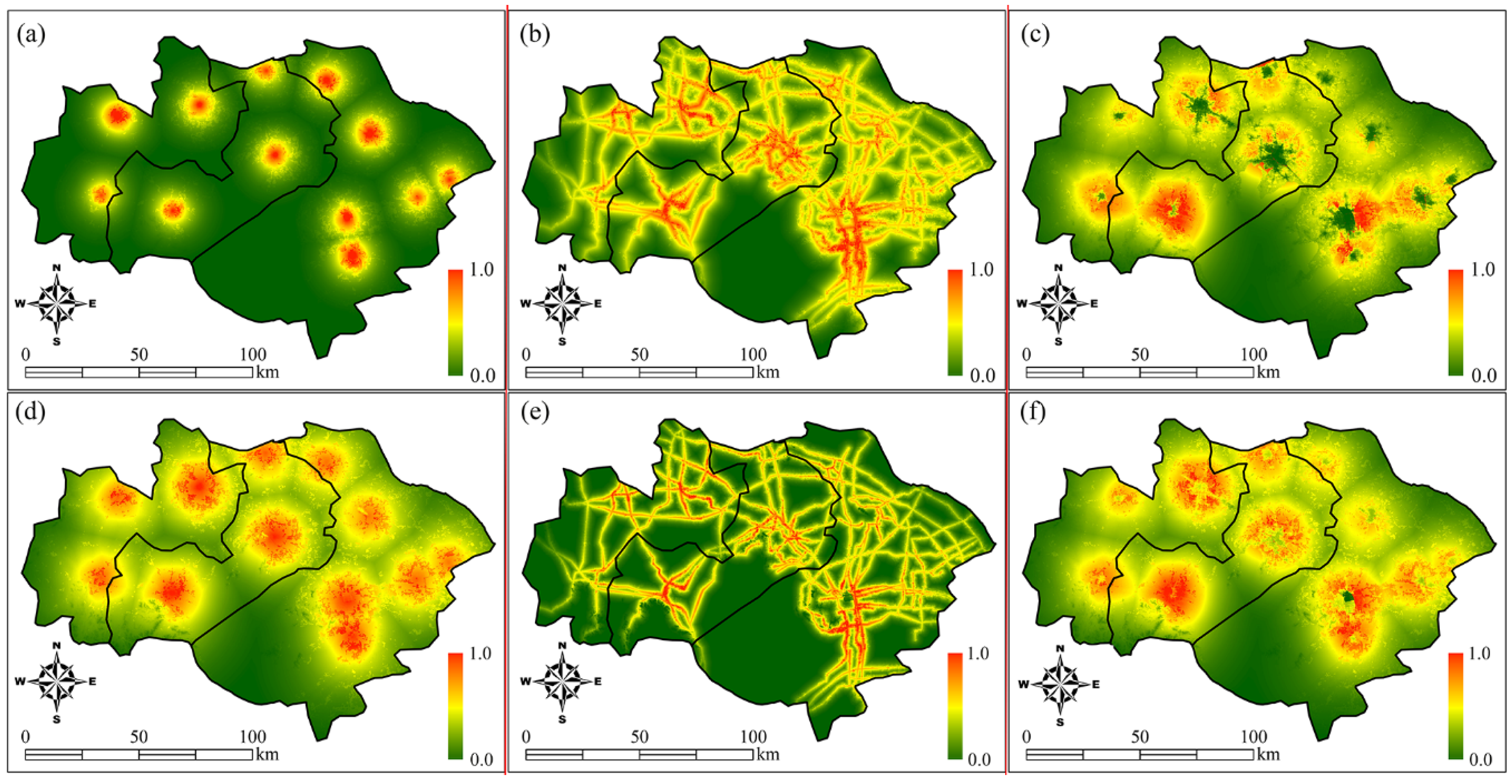
3.2.1. Land Transition Probability Map
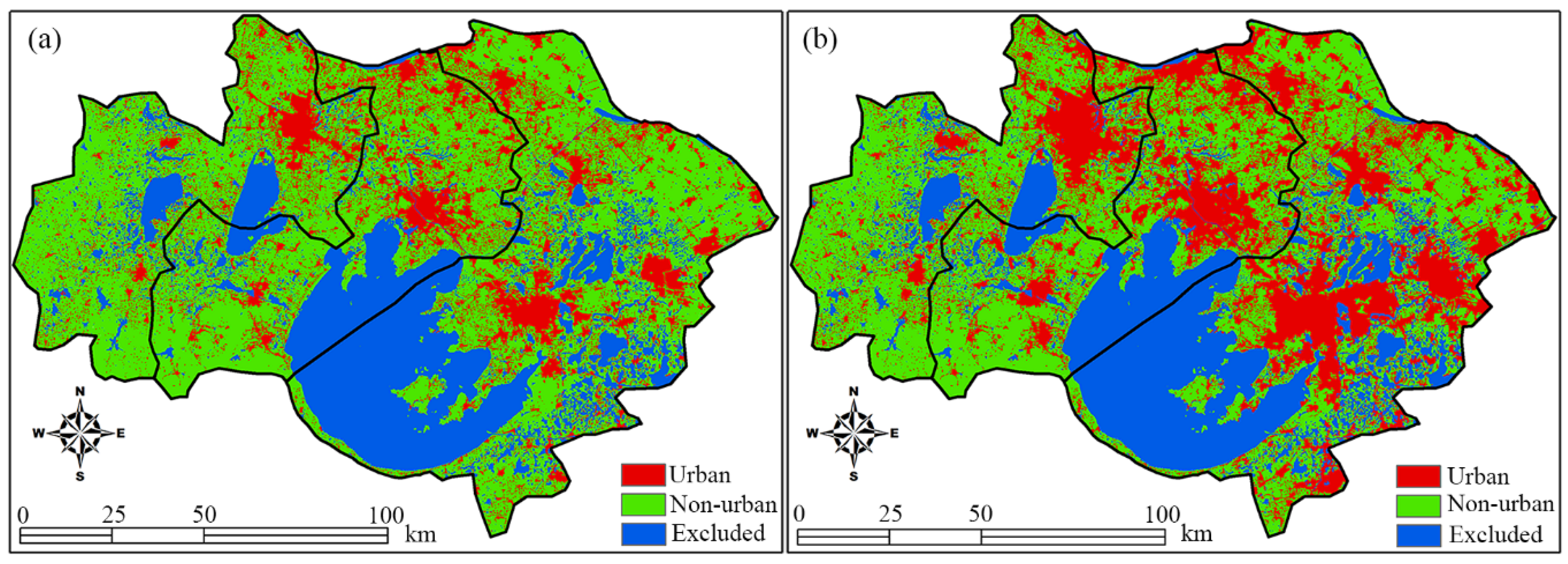
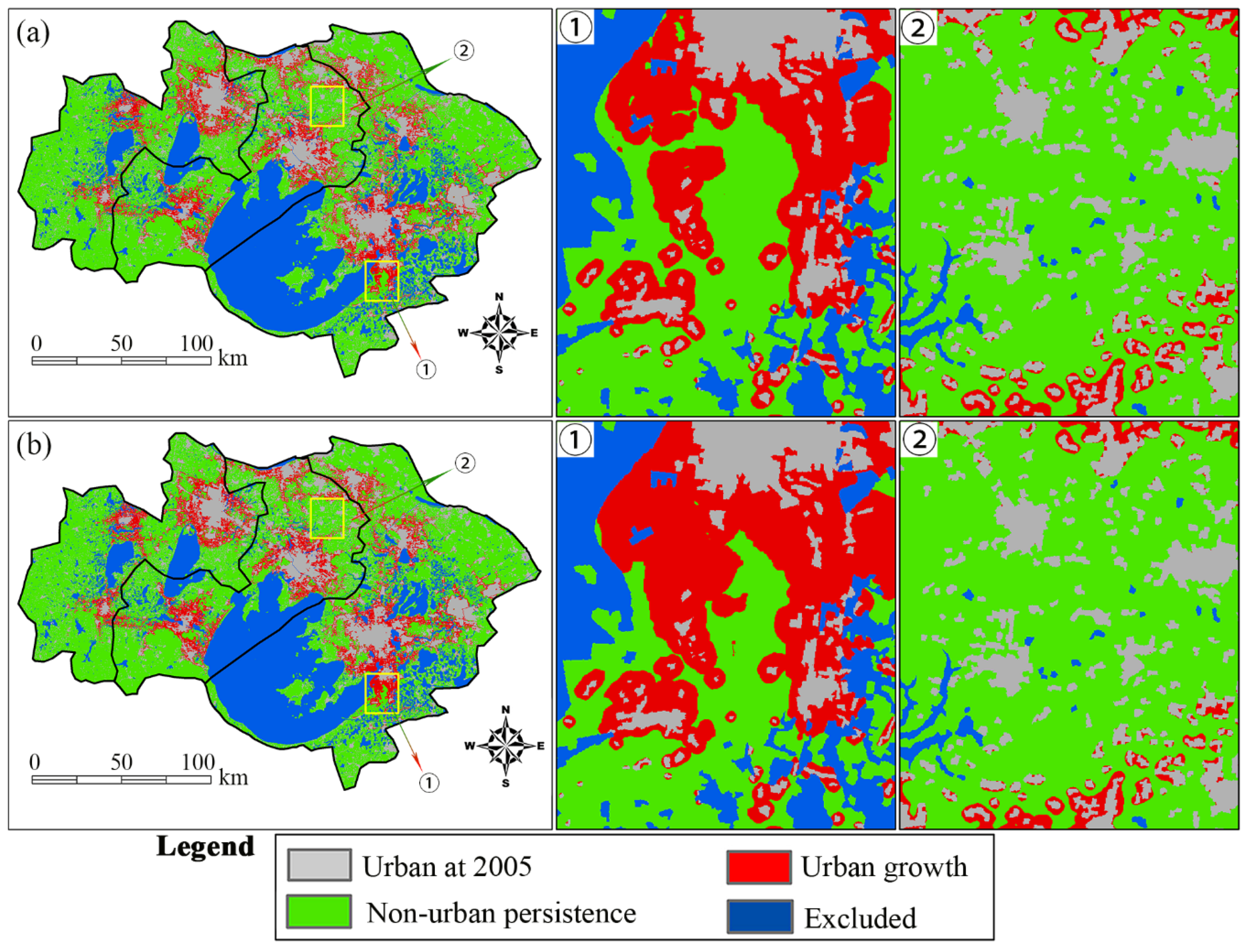
3.2.2. Simulated Urban Patterns for 2015
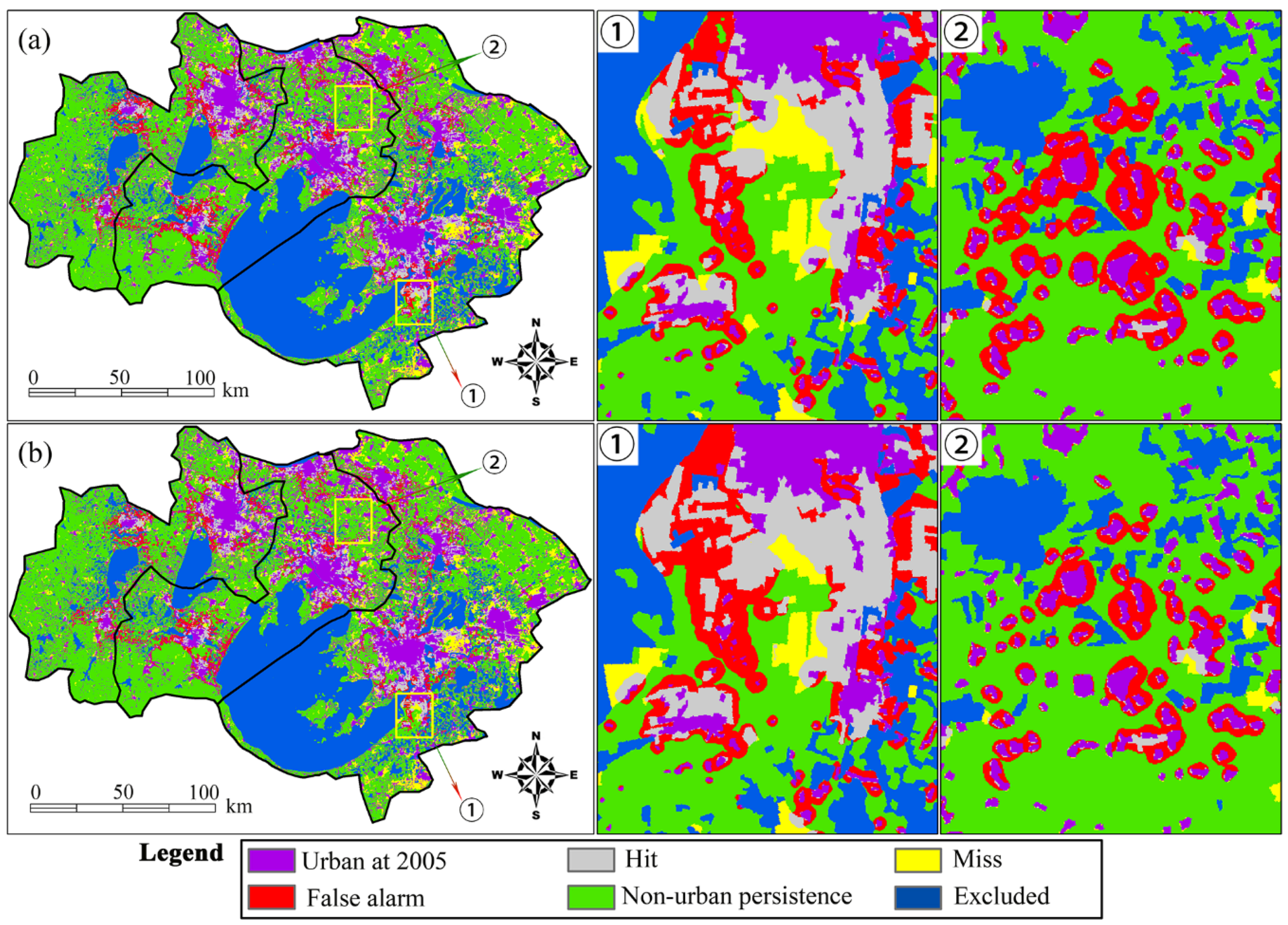
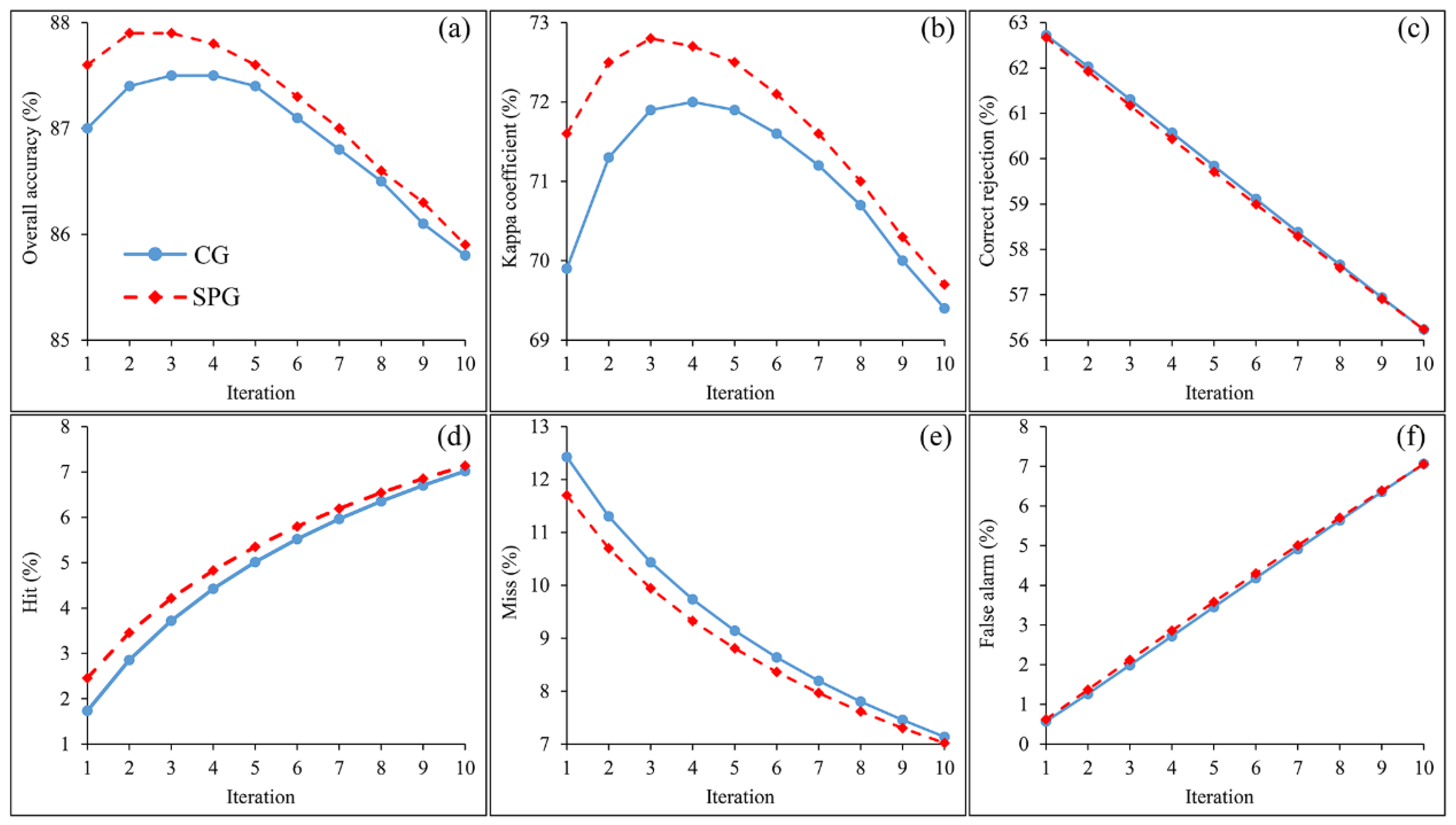
3.2.3. Accuracy and Error
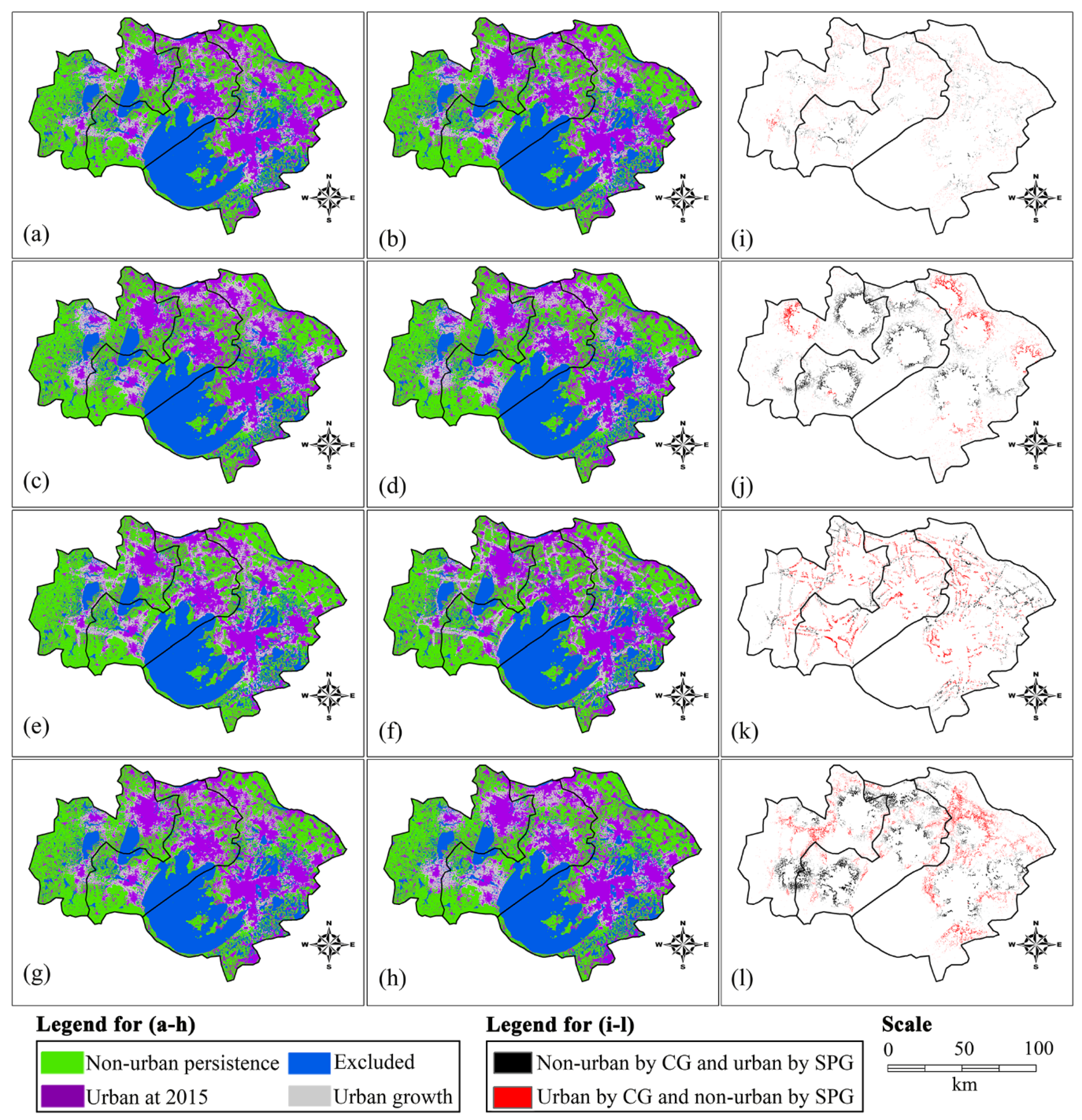
3.2.4. Future Scenario Projection
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Herold, M.; Goldstein, N.C.; Clarke, K.C. The spatiotemporal form of urban growth: Measurement, analysis and modeling. Remote Sens. Environ. 2003, 86, 286–302. [Google Scholar] [CrossRef]
- Rimal, B.; Zhang, L.; Keshtkar, H.; Haack, B.N.; Rijal, S.; Zhang, P. Land use/land cover dynamics and modeling of urban land expansion by the integration of cellular automata and markov chain. ISPRS Int. J. Geo-Inf. 2018, 7, 154. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Helbich, M.; Kainz, W.; Boloorani, A.D. Integration of logistic regression, markov chain and cellular automata models to simulate urban expansion. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 265–275. [Google Scholar] [CrossRef]
- Santé, I.; García, A.M.; Miranda, D.; Crecente, R. Cellular automata models for the simulation of real-world urban processes: A review and analysis. Landsc. Urban Plan. 2010, 96, 108–122. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, Y. Simulating the impact of economic and environmental strategies on future urban growth scenarios in Ningbo, China. Sustainability 2016, 8, 1045. [Google Scholar] [CrossRef]
- Feng, Y.; Li, H.; Tong, X.; Chen, L.; Liu, Y. Projection of land surface temperature considering the effects of future land change in the Taihu Lake Basin of China. Glob. Planet. Chang. 2018, 167, 24–34. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G.-O. Modelling sustainable urban development by the integration of constrained cellular automata and GIS. Int. J. Geogr. Inf. Sci. 2000, 14, 131–152. [Google Scholar] [CrossRef] [Green Version]
- Toffoli, T.; Margolus, N. Cellular Automata Machines: A New Environment for Modeling; MIT Press: Cambridge, MA, USA, 1987. [Google Scholar]
- Wu, F. Simland: A prototype to simulate land conversion through the integrated GIS and CA with AHP-derived transition rules. Int. J. Geogr. Inf. Sci. 1998, 12, 63–82. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, M.; Chen, L.; Liu, Y. Simulation of dynamic urban growth with partial least squares regression-based cellular automata in a GIS environment. ISPRS Int. J. Geo-Inf. 2016, 5, 243. [Google Scholar] [CrossRef]
- Yu, Y.; He, J.; Tang, W.; Li, C. Modeling urban collaborative growth dynamics using a multiscale simulation model for the Wuhan urban agglomeration area, China. ISPRS Int. J. Geo-Inf. 2018, 7, 176. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Shi, X.; Huang, K.; Liu, Y. A multi-type ant colony optimization (MACO) method for optimal land use allocation in large areas. Int. J. Geogr. Inf. Sci. 2012, 26, 1325–1343. [Google Scholar] [CrossRef]
- Torrens, P.M.; O’Sullivan, D. Cellular automata and urban simulation: Where do we go from here? Environ. Plan. B 2001, 28, 163–168. [Google Scholar] [CrossRef]
- Feng, Y.; Tong, X. Dynamic land use change simulation using cellular automata with spatially nonstationary transition rules. GISci. Remote Sens. 2018, 55, 678–698. [Google Scholar] [CrossRef]
- Maria de Almeida, C.; Batty, M.; Vieira Monteiro, A.M.; Câmara, G.; Soares-Filho, B.S.; Cerqueira, G.C.; Pennachin, C.L. Stochastic cellular automata modeling of urban land use dynamics: Empirical development and estimation. Comput. Environ. Urban Syst. 2003, 27, 481–509. [Google Scholar] [CrossRef]
- Laumanns, M.; Thiele, L.; Zitzler, E. An efficient, adaptive parameter variation scheme for metaheuristics based on the epsilon-constraint method. Eur. J. Oper. Res. 2006, 169, 932–942. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Tong, X. Calibration of cellular automata models using differential evolution to simulate present and future land use. Trans. GIS 2018, 22, 582–601. [Google Scholar] [CrossRef]
- Kamusoko, C.; Gamba, J. Simulating urban growth using a random forest-cellular automata (RF-CA) model. ISPRS Int. J. Geo-Inf. 2015, 4, 447–470. [Google Scholar] [CrossRef]
- Jafarnezhad, J.; Salmanmahiny, A.; Sakieh, Y. Subjectivity versus objectivity: Comparative study between brute force method and genetic algorithm for calibrating the SLEUTH urban growth model. J. Urban Plan. Dev. 2015, 142, 05015015. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, Y.; Tong, X. Comparison of metaheuristic cellular automata models: A case study of dynamic land use simulation in the Yangtze River Delta. Comput. Environ. Urban Syst. 2018, 70, 138–150. [Google Scholar] [CrossRef]
- Yang, J.; Tang, G.A.; Cao, M.; Zhu, R. An intelligent method to discover transition rules for cellular automata using bee colony optimisation. Int. J. Geogr. Inf. Sci. 2013, 27, 1849–1864. [Google Scholar] [CrossRef]
- Yang, X.; Zheng, X.-Q.; Lv, L.-N. A spatiotemporal model of land use change based on ant colony optimization, markov chain and cellular automata. Ecol. Model. 2012, 233, 11–19. [Google Scholar] [CrossRef]
- Cao, M.; Bennett, S.J.; Shen, Q.; Xu, R. A bat-inspired approach to define transition rules for a cellular automaton model used to simulate urban expansion. Int. J. Geogr. Inf. Sci. 2016, 30, 1961–1979. [Google Scholar] [CrossRef]
- Almeida, C.d.; Gleriani, J.; Castejon, E.F.; Soares-Filho, B. Using neural networks and cellular automata for modelling intra-urban land-use dynamics. Int. J. Geogr. Inf. Sci. 2008, 22, 943–963. [Google Scholar] [CrossRef]
- Rienow, A.; Goetzke, R. Supporting sleuth–enhancing a cellular automaton with support vector machines for urban growth modeling. Comput. Environ. Urban Syst. 2015, 49, 66–81. [Google Scholar] [CrossRef]
- Nesmachnow, S. An overview of metaheuristics: Accurate and efficient methods for optimisation. Int. J. Metaheuristics 2014, 3, 320–347. [Google Scholar] [CrossRef]
- Barredo, J.I.; Kasanko, M.; McCormick, N.; Lavalle, C. Modelling dynamic spatial processes: Simulation of urban future scenarios through cellular automata. Landsc. Urban Plan. 2003, 64, 145–160. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Shi, X.; Zhang, X.; Chen, Y. Simulating land-use dynamics under planning policies by integrating artificial immune systems with cellular automata. Int. J. Geogr. Inf. Sci. 2010, 24, 783–802. [Google Scholar] [CrossRef]
- Basse, R.M.; Omrani, H.; Charif, O.; Gerber, P.; Bódis, K. Land use changes modelling using advanced methods: Cellular automata and artificial neural networks. The spatial and explicit representation of land cover dynamics at the cross-border region scale. Appl. Geogr. 2014, 53, 160–171. [Google Scholar] [CrossRef]
- Newland, C.P.; Maier, H.R.; Zecchin, A.C.; Newman, J.P.; van Delden, H. Multi-objective optimisation framework for calibration of cellular automata land-use models. Environ. Model. Softw. 2018, 100, 175–200. [Google Scholar] [CrossRef]
- Nash, J.C.; Varadhan, R. Unifying optimization algorithms to aid software system users: Optimx for R. J. Stat. Softw. 2011, 43, 1–14. [Google Scholar] [CrossRef]
- Nash, J.C. On best practice optimization methods in R. J. Stat. Softw. 2014, 60, 1–14. [Google Scholar] [CrossRef]
- Wu, F. Calibration of stochastic cellular automata: The application to rural-urban land conversions. Int. J. Geogr. Inf. Sci. 2002, 16, 795–818. [Google Scholar] [CrossRef]
- Li, X.; Yang, Q.; Liu, X. Genetic algorithms for determining the parameters of cellular automata in urban simulation. Sci. China Ser. D Earth Sci. 2007, 50, 1857–1866. [Google Scholar] [CrossRef]
- Duthie, J.; Kockelman, K.; Valsaraj, V.; Zhou, B. Applications of integrated models of land use and transport: A comparison of itlup and urbansim land use models. In Proceedings of the 54th Annual North American Meetings of the Regional Science Association International, Savannah, GA, USA, 7–11 November 2007. [Google Scholar]
- Nagy, J.; Bardsley, J.; Plemmons, R.; Jefferies, S. A computational method for the restoration of images with an unknown, spatially-varying blur. Opt. Express 2006, 14, 1767–1782. [Google Scholar]
- Brooks, C.P.; Holmes, C.; Kramer, K.; Barnett, B.; Keitt, T.H. The role of demography and markets in determining deforestation rates near Ranomafana national park, Madagascar. PLoS ONE 2009, 4, e5783. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guan, Q.; Wang, L.; Clarke, K.C. An artificial-neural-network-based, constrained CA model for simulating urban growth. Am. Cartogr. 2005, 32, 369–380. [Google Scholar] [CrossRef]
- Shen, D.; Blasch, E.; Pham, K.; Chen, G.; Ling, H. Spatial Context for Moving Vehicle Detection in Wide Area Motion Imagery with Multiple Kernel Learning. Proc. SPIE 2013, 8751, doi. [Google Scholar]
- Price, K.; Storn, R.M.; Lampinen, J.A. Differential Evolution: A Practical Approach to Global Optimization; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Li, D.; Fukushima, M. On the global convergence of the BFGS method for nonconvex unconstrained optimization problems. SIAM J. Optimiz. 2001, 11, 1054–1064. [Google Scholar] [CrossRef]
- Liao, A. Modifying the BFGS method. Oper. Res. Lett. 1997, 20, 171–177. [Google Scholar] [CrossRef]
- Lewis, A.S.; Overton, M.L. Nonsmooth Optimization via Bfgs. Available online: https://www.semanticscholar.org/paper/Nonsmooth-Optimization-via-Bfgs-Overton/9e9db481d16bc409abc95853687f3fd7e1784641 (accessed on 28 April 2018).
- Gay, D.M. Usage Summary for Selected Optimization Routines; Computing Science Technical Report No. 153; AT&T Bell Laboratories: Murray Hill, NJ, USA, 1990. [Google Scholar]
- Ardia, D.; David, J.; Arango, O.; Gómez, N.D.G. Jump-diffusion calibration using differential evolution. Wilmott 2011, 2011, 76–79. [Google Scholar] [CrossRef] [Green Version]
- Thmasebinejad, Z.; Tabrizi, E. Sensitivity analysis in correlated bivariate continuous and binary responses. Appl. Appl. Math. Int. J. 2015, 10, 609–619. [Google Scholar]
- Nikishin, A.A.; Yeremin, A.Y. Variable block cg algorithms for solving large sparse symmetric positive definite linear systems on parallel computers, i: General iterative scheme. SIAM J. Matrix Anal. Appl. 1995, 16, 1135–1153. [Google Scholar] [CrossRef]
- Gergelits, T.; Strakoš, Z. Composite convergence bounds based on chebyshev polynomials and finite precision conjugate gradient computations. Numer. Algorithms 2014, 65, 759–782. [Google Scholar] [CrossRef]
- Birgin, E.G.; Martínez, J.M.; Raydan, M. Spectral projected gradient methods: Review and perspectives. J. Stat. Softw. 2014, 60, 1–21. [Google Scholar] [CrossRef]
- Pontius, R.G.; Parmentier, B. Recommendations for using the relative operating characteristic (ROC). Landsc. Ecol. 2014, 29, 367–382. [Google Scholar] [CrossRef]
- Pontius, R.G.; Si, K. The total operating characteristic to measure diagnostic ability for multiple thresholds. Int. J. Geogr. Inf. Sci. 2014, 28, 570–583. [Google Scholar] [CrossRef]
- Pontius, R.G.; Shusas, E.; McEachern, M. Detecting important categorical land changes while accounting for persistence. Agric. Ecosyst. Environ. 2004, 101, 251–268. [Google Scholar] [CrossRef]
- Pontius, R.G.; Boersma, W.; Castella, J.-C.; Clarke, K.; de Nijs, T.; Dietzel, C.; Duan, Z.; Fotsing, E.; Goldstein, N.; Kok, K. Comparing the input, output, and validation maps for several models of land change. Ann. Reg. Sci. 2008, 42, 11–37. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Vanbelle, S.; Albert, A. A note on the linearly weighted kappa coefficient for ordinal scales. Stat. Methodol. 2009, 6, 157–163. [Google Scholar] [CrossRef] [Green Version]
- McGarigal, K. Fragstats v4: Spatial Pattern Analysis Program for Categorical and Continuous Maps-Help Manual; University of Massachusetts: Amherst, MA, USA, 2014. [Google Scholar]
- Dunn, J.C. Spatial metrics of integral and separable dimensions. J. Exp. Psychol. Hum. Percept. Perform. 1983, 9, 242. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; Guan, X.; Zhou, M.; Wang, Y. Land resources allocation strategies in an urban area involving uncertainty: A case study of suzhou, in the Yangtze River Delta of China. Environ. Manag. 2014, 53, 894–912. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Gao, Z.; Wang, X.; Chen, Y. Modeling the impact of urbanization on the local and regional climate in Yangtze River Delta, China. Theor. Appl. Climatol. 2010, 102, 331–342. [Google Scholar] [CrossRef]
- Feng, Y.; Tong, X. Using exploratory regression to identify optimal driving factors for cellular automaton modeling of land use change. Environ. Monit. Assess. 2017, 189, 515. [Google Scholar] [CrossRef] [PubMed]
- National Earth System Science Data Sharing Infrastructure. Available online: www.geodata.cn (accessed on 28 April 2018).
- Geospatial Data Cloud. Available online: www.gscloud.cn (accessed on 28 April 2018).
- WorldPop. Available online: worldpop.org.uk (accessed on 28 April 2018).
- Liu, X.; Liang, X.; Xu, X.; Ou, J.; Li, X.; Chen, Y.; Li, S.; Wang, S.; Pei, F. A future land use simulation model (FLUS) for simulating multiple land use scenarios by coupling human and natural effects. Landsc. Urban Plan. 2017, 168, 94–116. [Google Scholar] [CrossRef]
- Gounaridis, D.; Chorianopoulos, I.; Koukoulas, S. Exploring prospective urban growth trends under different economic outlooks and land-use planning scenarios: The case of Athens. Appl. Geogr. 2018, 90, 134–144. [Google Scholar] [CrossRef]
- Liberti, L.; Drazic, M. Variable Neighbourhood Search for the Global Optimization of Constrained NLPs; Proceedings of the GO Workshop: Almeria, Spain, 2005. [Google Scholar]
- Wolfram, S. Cellular automata as models of complexity. Nature 1984, 311, 419. [Google Scholar] [CrossRef]
- Chowdhury, S.; Zhang, J.; Messac, A.; Castillo, L. Characterizing the influence of land configuration on the optimal wind farm performance. In Proceedings of the ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; American Society of Mechanical Engineers: New York, NY, USA, 2011; pp. 367–378. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Bound | Parameter | |||||
|---|---|---|---|---|---|---|---|
| Lower | Upper | Nelder-Mead | BFGS | NLMINB | CG | SPG | |
| Constant (a0) | 0.0 | 2.5 | 2.3501 | 2.3501 | 2.3571 | 2.3501 | 1.2259 |
| CITY (a1) | −1.5 | 0.0 | −1.2328 | −1.2328 | −1.235 | −1.2328 | −1.1847 |
| COUNTY (a2) | −2.5 | 0.0 | −2.3400 | −2.3400 | −2.3378 | −2.3400 | −2.3602 |
| ROAD (a6) | −5.5 | 0.0 | −5.0887 | −5.0887 | −5.1342 | −5.0887 | −5.2511 |
| RAIL (a5) | 0.0 | 1.0 | 0.4987 | 0.4987 | 0.5005 | 0.4987 | 0.4815 |
| DEM (a3) | −25.0 | 0.0 | −24.4068 | −24.4068 | −24.4449 | −24.4068 | −14.9771 |
| POP (a4) | −2.5 | 0.0 | −2.0799 | −2.0799 | −2.0898 | −2.0799 | −2.1664 |
| Variable | CG | SPG | ||||
|---|---|---|---|---|---|---|
| COUNTY-Scenario | ROAD-Scenario | POP-Scenario | COUNTY-Scenario | ROAD-Scenario | POP-Scenario | |
| Constant (a0) | −0.1281 | −0.6451 | 0.1698 | −0.6384 | 0.6875 | −0.2087 |
| CITY (a1) | −0.4885 | −1.1616 | −0.9569 | −0.4898 | −1.4611 | −0.9365 |
| COUNTY (a2) | −1.9124 | −4.6545 | −2.3049 | −3.8563 | ||
| ROAD (a6) | −0.1621 | −0.6391 | −0.5234 | −0.5387 | ||
| RAIL (a5) | 1.2114 | 0.6510 | −1.1729 | 0.0175 | 0.7939 | −0.4839 |
| DEM (a3) | −0.4486 | 0.1688 | −1.0863 | −1.2922 | −6.7003 | −1.6566 |
| POP (a4) | 0.5701 | 0.9831 | −0.1517 | −3.0661 | ||
| Category | Metric | CG | SPG | ||||||
|---|---|---|---|---|---|---|---|---|---|
| BAU-Scenario | COUNTY-Scenario | ROAD-Scenario | POP-Scenario | BAU-Scenario | COUNTY-Scenario | ROAD-Scenario | POP-Scenario | ||
| Area and Edge | PLAND (%) | 38.35 | 37.97 | 38.66 | 38.62 | 38.25 | 38.79 | 38.42 | 38.65 |
| LPI (%) | 7.68 | 8.49 | 13.68 | 8.59 | 7.72 | 8.89 | 16.11 | 8.80 | |
| TE (1000 km) | 20.87 | 21.00 | 18.62 | 21.54 | 21.30 | 21.11 | 22.03 | 21.15 | |
| Shape | PAFRAC | 1.25 | 1.24 | 1.24 | 1.25 | 1.26 | 1.26 | 1.28 | 1.25 |
| Aggregation | NP (num) | 5493 | 5821 | 5357 | 5528 | 5588 | 5555 | 5598 | 5540 |
| PD (num/km2) | 0.32 | 0.34 | 0.31 | 0.32 | 0.32 | 0.32 | 0.32 | 0.32 | |
| LSI (%) | 64.63 | 65.42 | 57.38 | 66.46 | 66.03 | 65.01 | 68.15 | 65.22 | |
| CLUMPY (%) | 0.96 | 0.96 | 0.97 | 0.96 | 0.96 | 0.96 | 0.96 | 0.96 | |
| PLADJ (%) | 97.62 | 97.58 | 97.89 | 97.56 | 97.56 | 97.62 | 97.49 | 97.61 | |
| COHESION (%) | 99.72 | 99.68 | 99.83 | 99.75 | 99.72 | 99.72 | 99.86 | 99.76 | |
| DIVISION (%) | 0.99 | 0.99 | 0.97 | 0.98 | 0.99 | 0.99 | 0.96 | 0.98 | |
| AI (%) | 97.66 | 97.61 | 97.93 | 97.60 | 97.60 | 97.65 | 97.53 | 97.64 | |
| IJI (%) | 69.25 | 72.09 | 77.04 | 71.32 | 69.78 | 73.34 | 69.74 | 71.86 | |
| MESH (ha) | 2.53 | 2.18 | 5.42 | 3.20 | 2.56 | 2.51 | 6.84 | 3.39 | |
| SPLIT | 68.25 | 79.29 | 31.92 | 54.10 | 67.55 | 68.85 | 25.29 | 50.95 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Cai, Z.; Tong, X.; Wang, J.; Gao, C.; Chen, S.; Lei, Z. Urban Growth Modeling and Future Scenario Projection Using Cellular Automata (CA) Models and the R Package Optimx. ISPRS Int. J. Geo-Inf. 2018, 7, 387. https://doi.org/10.3390/ijgi7100387
Feng Y, Cai Z, Tong X, Wang J, Gao C, Chen S, Lei Z. Urban Growth Modeling and Future Scenario Projection Using Cellular Automata (CA) Models and the R Package Optimx. ISPRS International Journal of Geo-Information. 2018; 7(10):387. https://doi.org/10.3390/ijgi7100387
Chicago/Turabian StyleFeng, Yongjiu, Zongbo Cai, Xiaohua Tong, Jiafeng Wang, Chen Gao, Shurui Chen, and Zhenkun Lei. 2018. "Urban Growth Modeling and Future Scenario Projection Using Cellular Automata (CA) Models and the R Package Optimx" ISPRS International Journal of Geo-Information 7, no. 10: 387. https://doi.org/10.3390/ijgi7100387
APA StyleFeng, Y., Cai, Z., Tong, X., Wang, J., Gao, C., Chen, S., & Lei, Z. (2018). Urban Growth Modeling and Future Scenario Projection Using Cellular Automata (CA) Models and the R Package Optimx. ISPRS International Journal of Geo-Information, 7(10), 387. https://doi.org/10.3390/ijgi7100387