Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers


Abstract
:1. Introduction
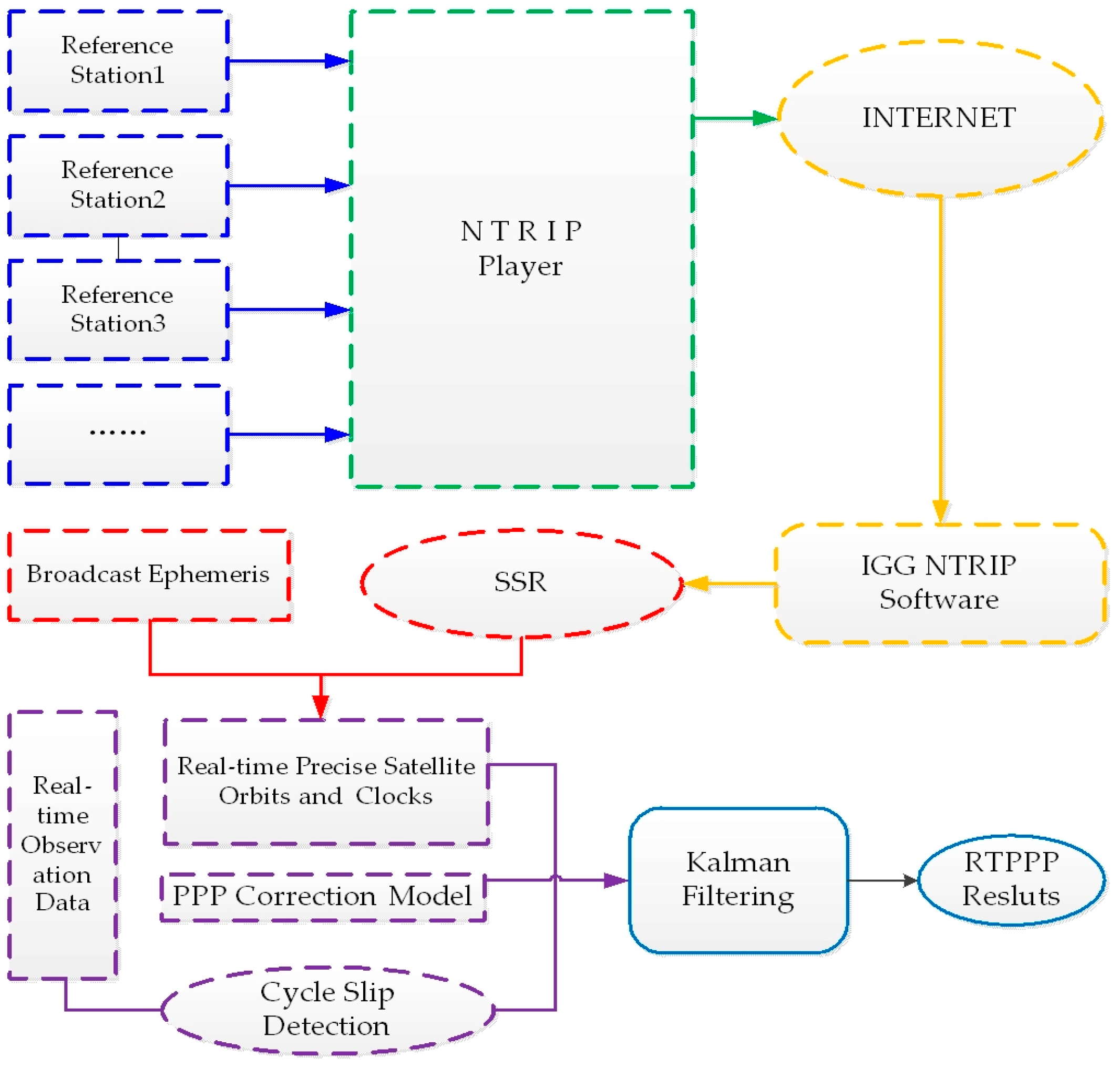
2. The Acquisition of Real-Time Observation Data and State Space Representation Product
- Supports both RTCM and iGMAS formats;
- Supports real-time data and products for four systems (GPS/GLONASS/BDS/GALILEO) with multiple addresses and mount points;
- Provides a data sharing mechanism based on sharing memory and Socket;
- A user-friendly graphic interface that allows users to select stations on a map;
3. Real-Time Precise Orbit and Clock Recovery
4. Assessment of the Real-Time Orbit and Clock Corrections for Multi-GNSS
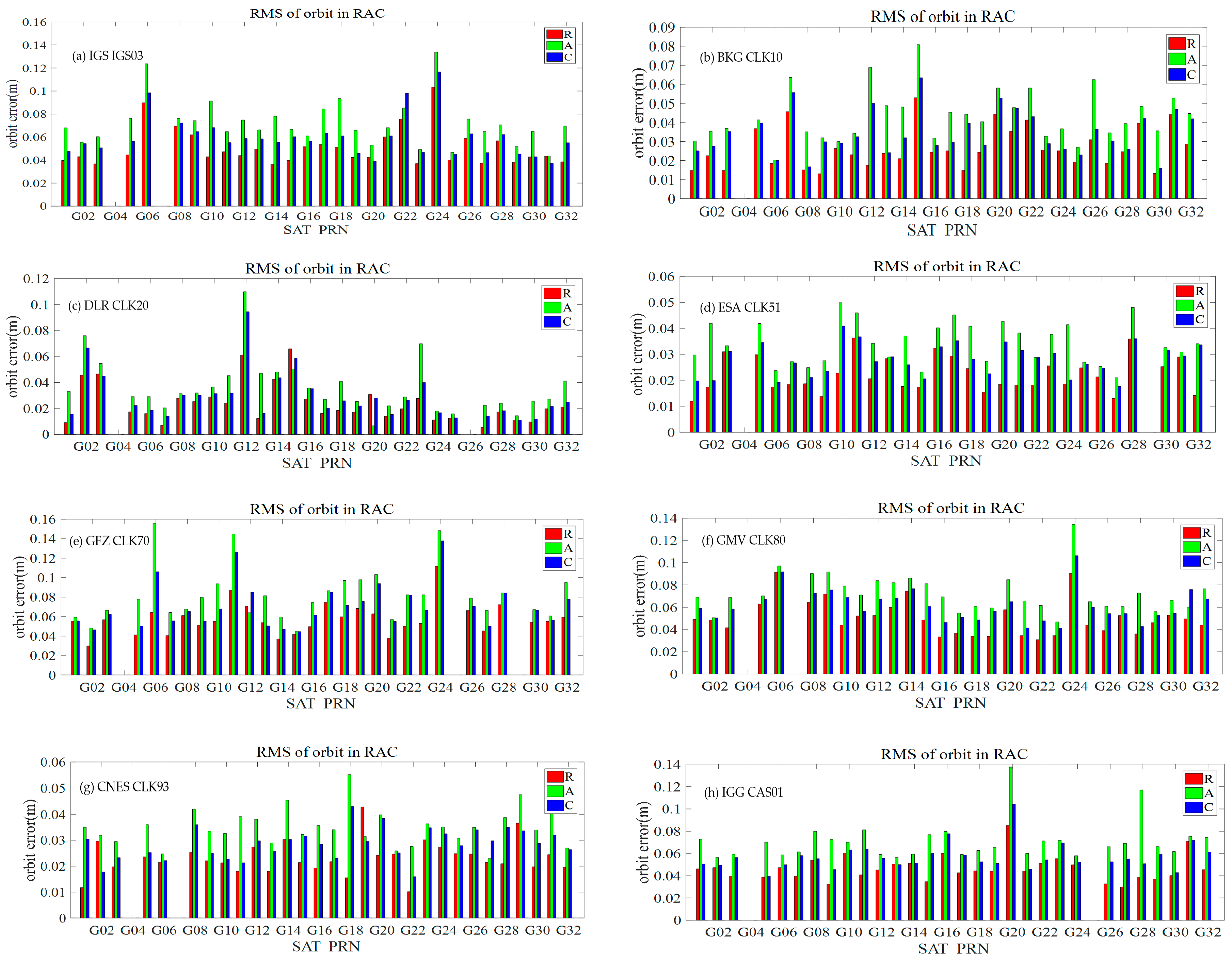
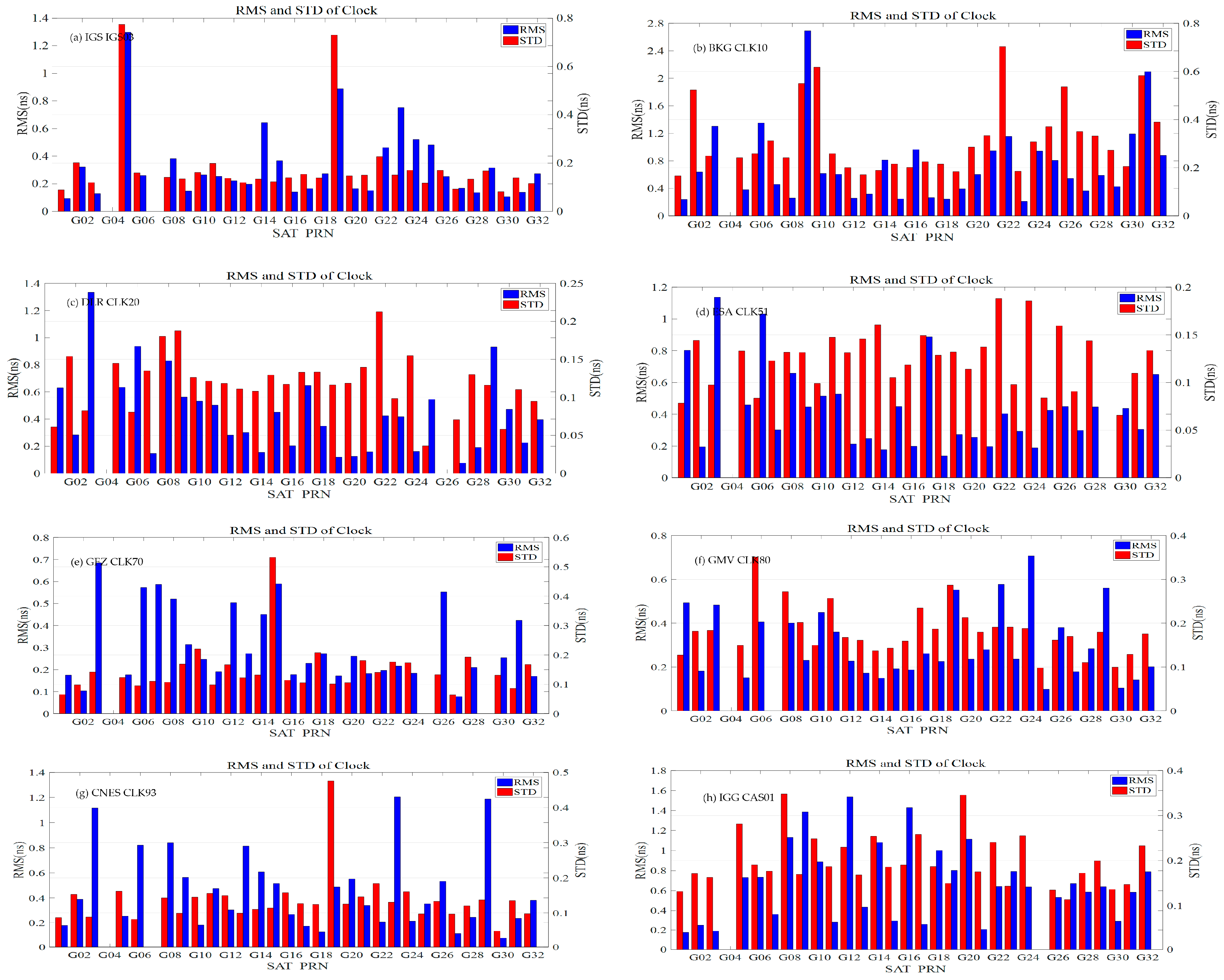
4.1. Validation Results of GPS Real-Time Orbit and Clock Products
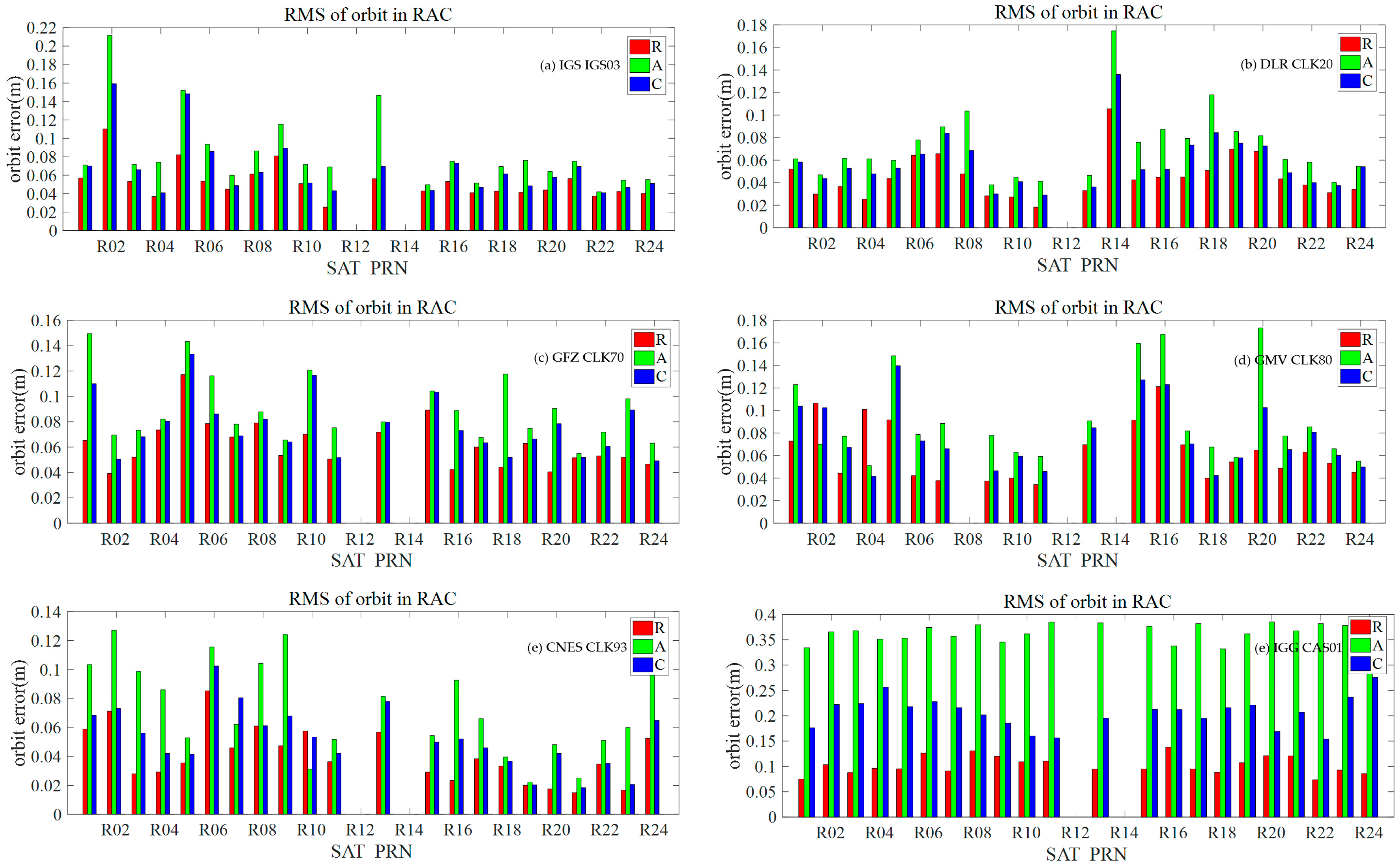
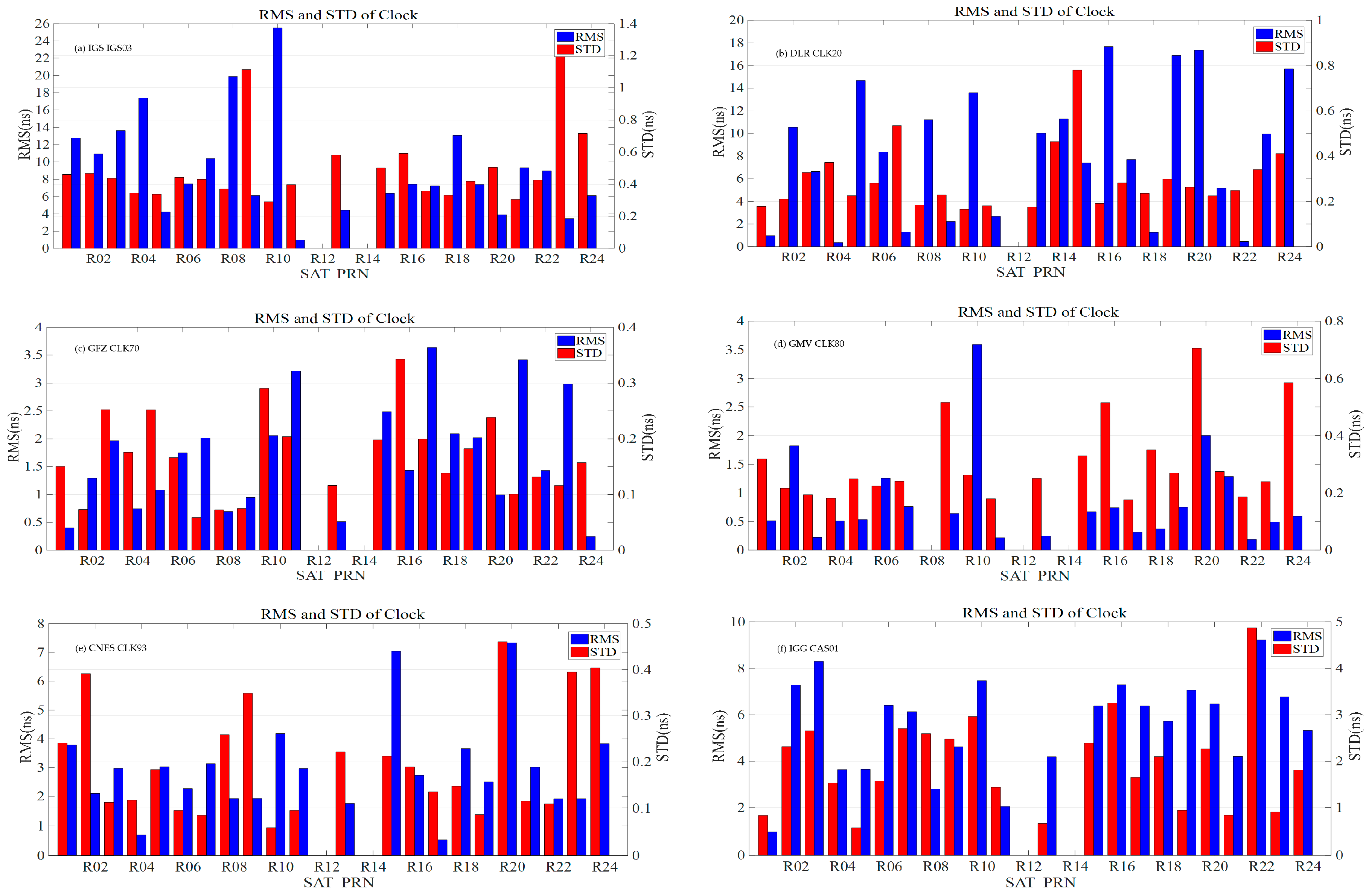
4.2. Validation Results of GLONASS Real-Time Orbit and Clock Products
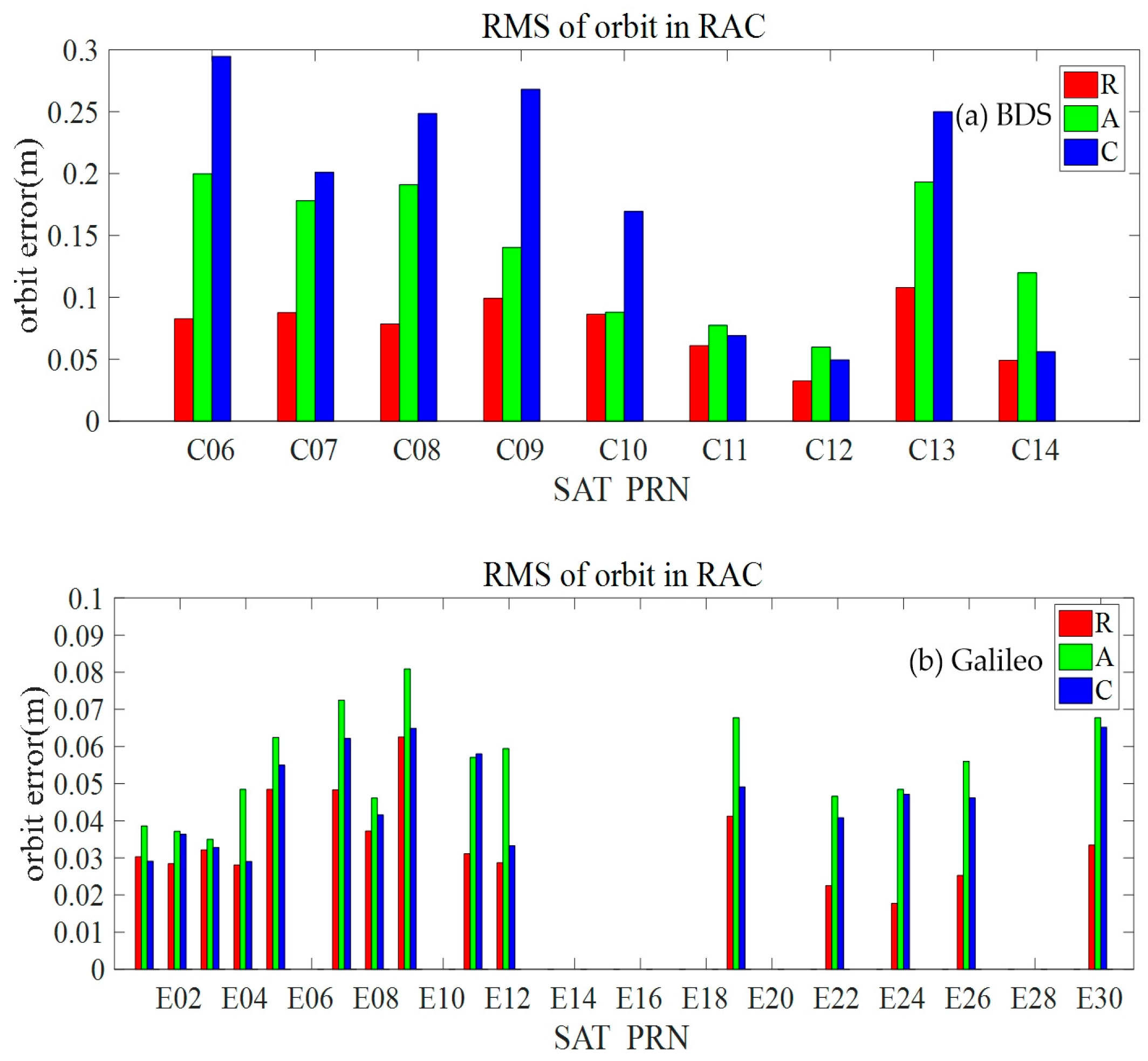
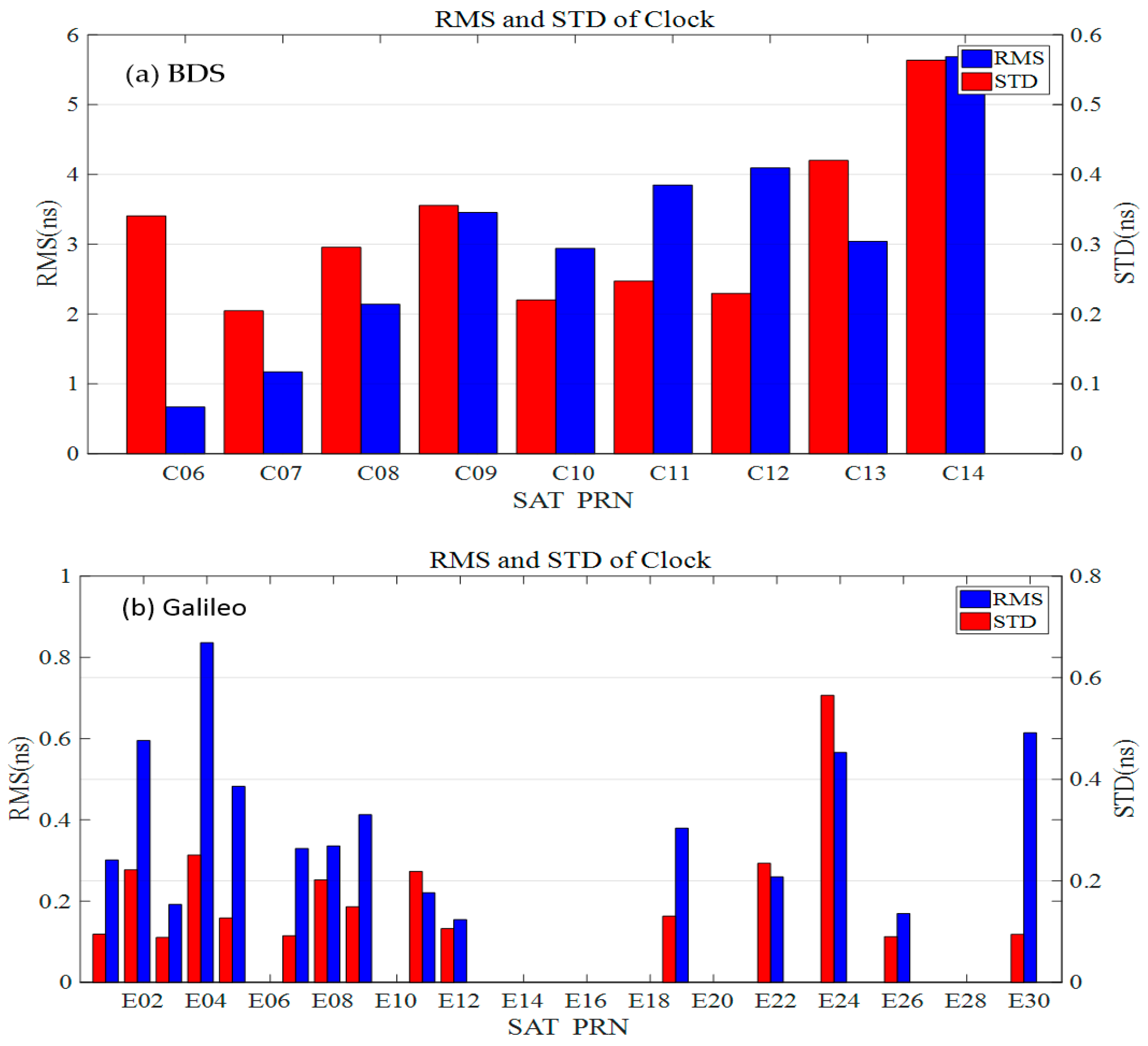
4.3. Validation Results of BDS and Galileo Real-Time Orbit and Clock Products
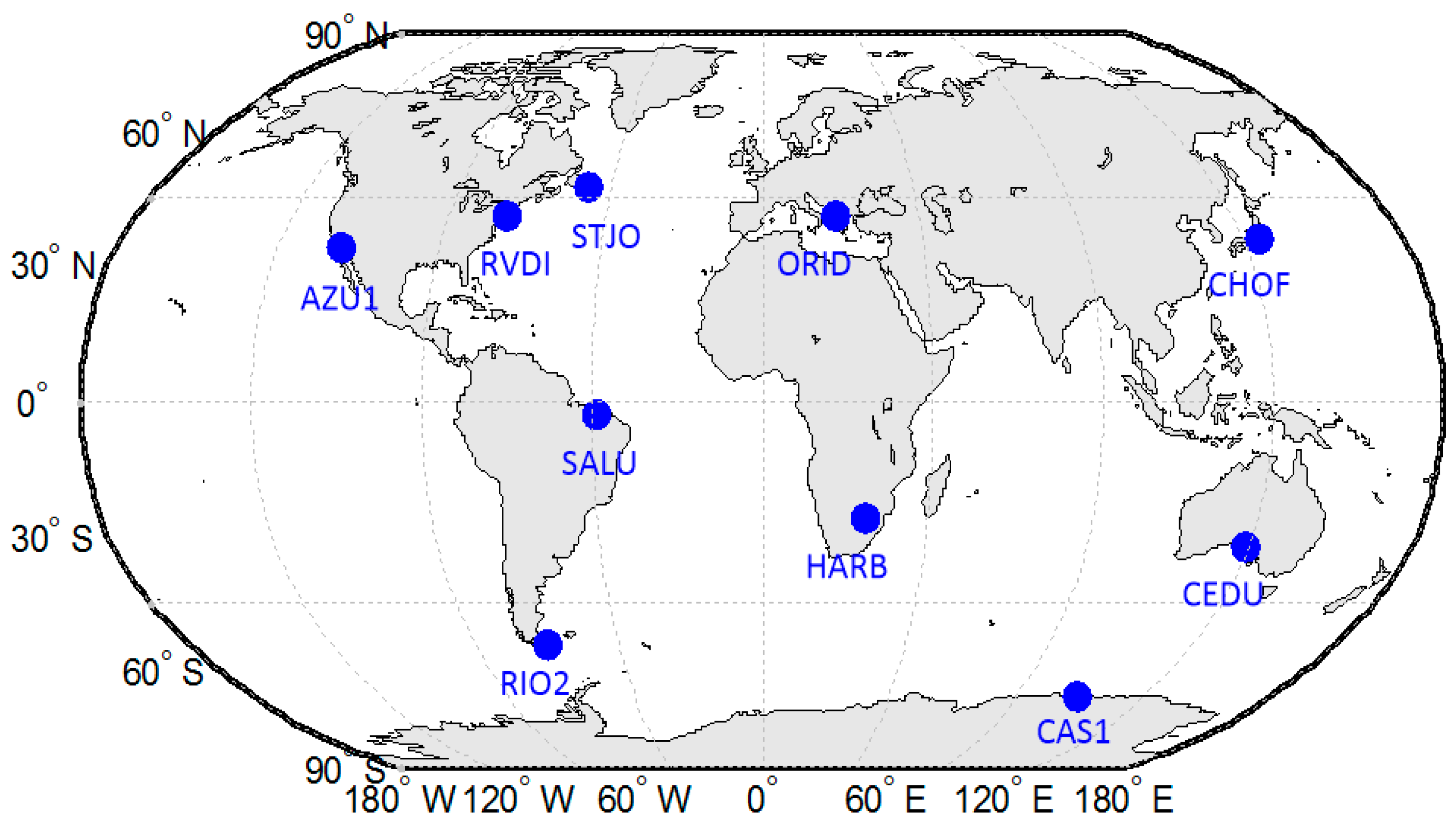
5. Positioning Results of Real-Time PPP with IGS Stations
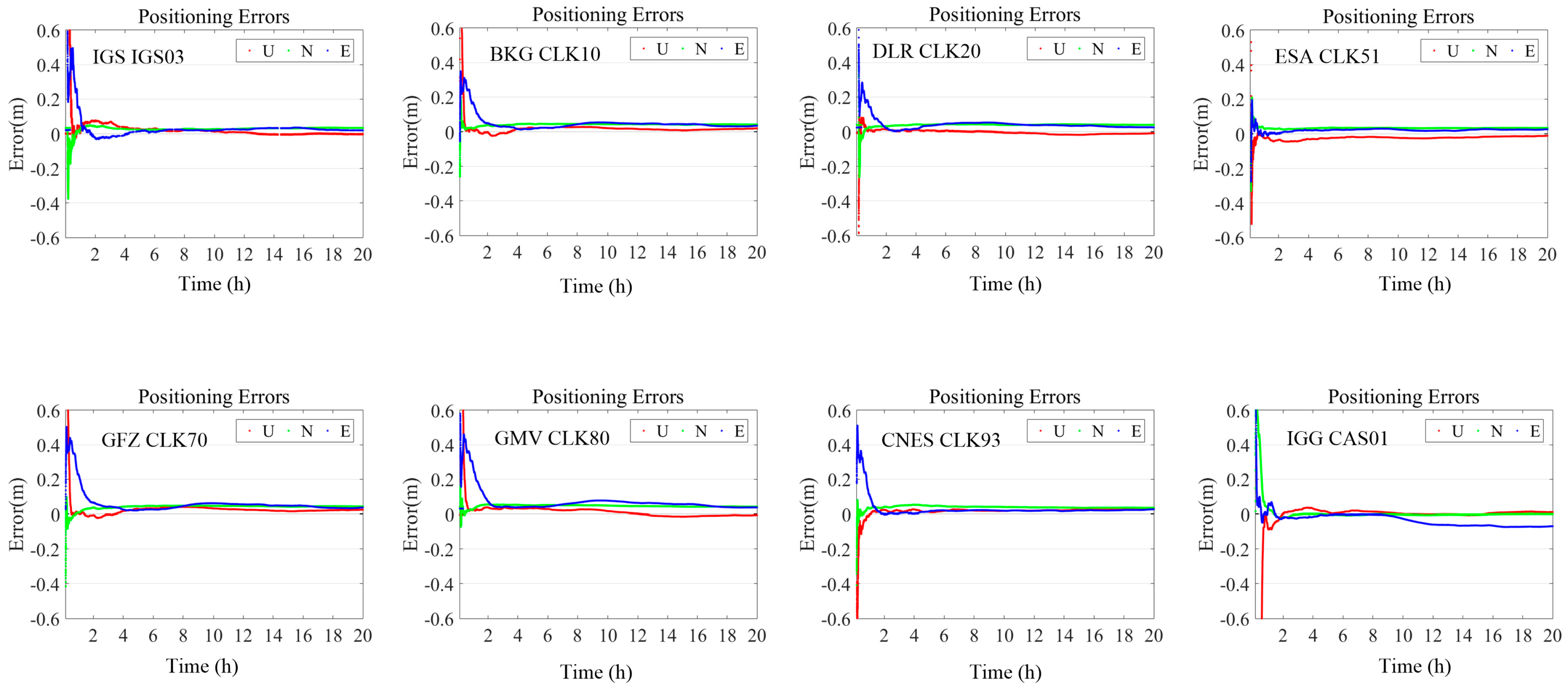
5.1. Result of Real-Time PPP in Static Mode
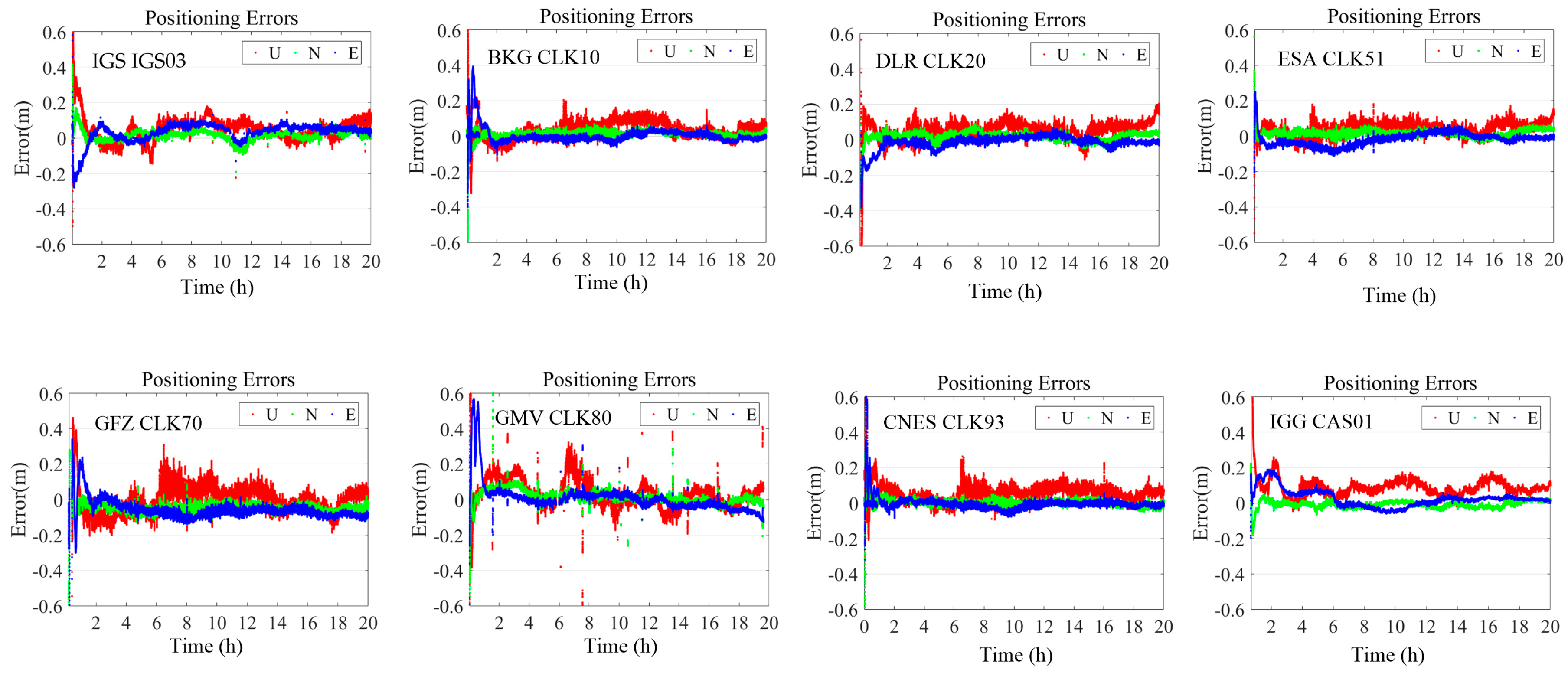
5.2. Result of Real-Time PPP in Simulated Kinematic Mode
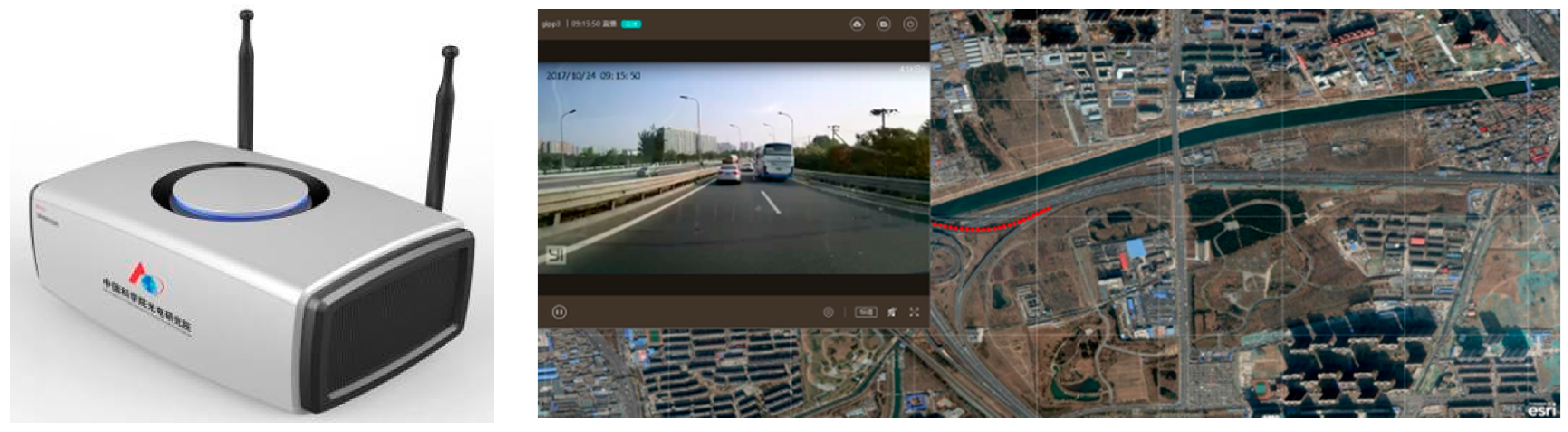
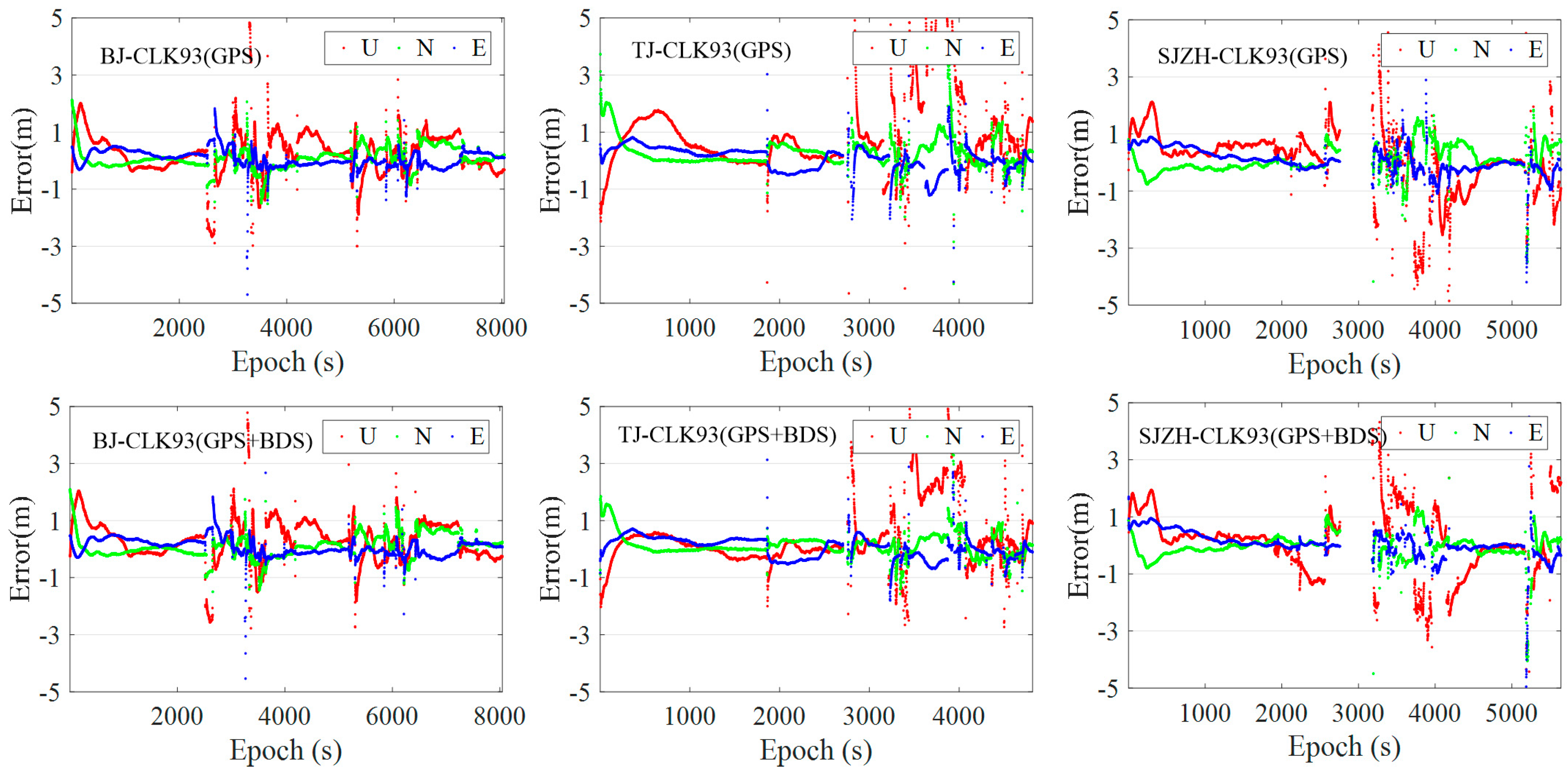
6. Positioning Result of Real-Time Kinematic PPP in Urban Experiment
7. Conclusions
- A comparison of real-time precise products developed by eight selected ACs, i.e., BKG, DLR, ESA, GFZ, GMV, CNES, CAS, and IGS, with respect to the final precise products, showed that the RMS of differences for GPS between real-time orbit and IGS final orbit was better than 8 cm, whereas the STD of GPS clock differences was better than 0.3 ns. The RMS of GLONASS orbit differences between the real-time product and ESA final product was less than 10 cm, and clock STD was better than 0.6 ns, except for CAS01. The 1DRMS of orbit differences for BDS and Galileo in the CLK93 product were 14.54 and 4.42 cm, respectively, in contrast to 0.32 and 0.18 ns for clock STD.
- Static mode and simulated kinematic mode PPP results from 10 stations in the IGS/MGEX network indicated that the PPP results using real-time products developed by BKG, DLR, ESA, GFA, GMV, CNES, and CAS needed nearly the same convergence time (about 20–30 min) to reach about 10 cm and 15 cm level accuracy as using IGS final precise ephemeris and clock products.
- CNES and CAS products were selected for the real-time kinematic PPP tests carried out in Beijing, Tianjin, and Shijiazhuang, China. Results indicated that CLK93 products showed a higher accuracy than CAS01 in real-time kinematic PPP, horizontally and vertically, when being tested under the same conditions. Moreover, when using the same product for real-time PPP solution, the GPS + BDS dual system showed higher accuracy than the GPS single system.
- The real-time SSR product from the eight selected ACs was advantageous to aid the real-time PPP user achieving positioning with sub-meter level accuracy (including the result during the convergence or re-convergence period) in the horizontal direction and could be used for lane identification in the near future.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Abdi, N.; Ardalan, A.A.; Karimi, R.; Rezvani, M.H. Performance assessment of multi-gnss real-time ppp over iran. Adv. Space Res. 2017, 59, 2870–2879. [Google Scholar] [CrossRef]
- Barsever, Y.; Muellerschoen, R. NASA’s global differential gps system. In Proceedings of the EGS-AGU-EUG Joint Assembly, Nice, France, 6–11 April 2003. [Google Scholar]
- Ge, M.; Chen, J.; Douša, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2012, 16, 9–17. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O. Kalman-filter-based gps clock estimation for near real-time positioning. GPS Solut. 2009, 13, 173–182. [Google Scholar] [CrossRef]
- Huang, G.; Zhang, Q.; Li, H.; Fu, W. Quality variation of gps satellite clocks on-orbit using igs clock products. Adv. Space Res. 2013, 51, 978–987. [Google Scholar] [CrossRef]
- Yu, X.; Gao, J. Kinematic precise point positioning using multi-constellation global navigation satellite system (gnss) observations. Int. J. Geo-Inf. 2017, 6, 6. [Google Scholar] [CrossRef]
- Asari, K.; Suzuki, T.; Kubo, N.; Shima, M.; Saito, M. Ssr ppp for asia-pacific services. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2014, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Bar-Sever, Y.; Bell, B.; Dorsey, A.; Srinivasan, J. Space Applications of the Nasa Global Differential GPS System; Jpl Technical Reports; Institute of Navigation: Portland, OR, USA, 2003. [Google Scholar]
- Mervart, L.; Weber, G. Real-time combination of gnss orbit and clock correction streams using a kalman filter approach. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 707–711. [Google Scholar]
- Dixon, K. Starfire™: A global sbas for sub-decimeter precise point positioning. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 2286–2296. [Google Scholar]
- Kouba, J. A Guide to Using International Gnss Service (Igs) Products; IGS Central Bureau: Pasadena, CA, USA, 2009. [Google Scholar]
- Melgard, T.; Vigen, E.; Jong, K.D.; Lapucha, D.; Visser, H.; Oerpen, O. G2-the first real-time gps and glonass precise orbit and clock service. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 1885–1891. [Google Scholar]
- IGS International GNSS Service. Available online: http://www.igs.org/products (accessed on 7 February 2018).
- Caissy, M.; Agrotis, L.; Weber, G.; Hernandez-Pajares, M.; Hugentobler, U. Coming Soon: The International Gnss Real-Time Service. GPS World 2012, 23, 52–58. [Google Scholar]
- Chen, L.; Zhao, Q.; Hu, Z.; Jiang, X.; Geng, C.; Ge, M.; Shi, C. Gnss global real-time augmentation positioning: Real-time precise satellite clock estimation, prototype system construction and performance analysis. Adv. Space Res. 2018, 61, 367–384. [Google Scholar] [CrossRef]
- Colombo, O. Real-time, wide-area, precise kinematic positioning using data from internet ntrip streams. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Network Rtk Session, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Li, Z.; Zhang, J.; Li, T.; He, X.; Wu, M. Analysis of static and dynamic real-time precise point positioning and precision based on ssr correction. In Proceedings of the IEEE International Conference on Information and Automation, Macau, China, 18–20 July 2017; pp. 2022–2027. [Google Scholar]
- Liu, Z.Q.; Wang, J.X. Realization and analysis of real-time precise point positioning based on ssr broadcast ephemeris corrections. Sci. Surv. Mapp. 2014, 39, 15–19. [Google Scholar]
- Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, Z.; Yuan, H. Validation and assessment of multi-gnss real-time precise point positioning in simulated kinematic mode using igs real-time service. Remote Sens. 2018, 10, 337. [Google Scholar] [CrossRef]
- Weber, G.; Mervart, L.; Lukes, Z.; Rocken, C.; Dousa, J. Real-time clock and orbit corrections for improved point positioning via Ntrip. In Proceedings of the ION GNSS 20th International Technical Meeting of the Satellite Division, Fort Worth, TX, USA, 25–28 September 2007; pp. 1992–1998. [Google Scholar]
- Zhang, B. Three methods to retrieve slant total electron content measurements from ground-based gps receivers and performance assessment. Radio Sci. 2016, 51, 972–988. [Google Scholar] [CrossRef]
- Jiao, W. International GNSS Monitoring and Assessment System (iGMAS) and latest progress. In Proceedings of the China Satellite Navigation Conference (CSNC), Nanjing, China, 21–23 May 2014. [Google Scholar]
- International GNSS Monitoring & Assessment System. Available online: http://www.igmas.org (accessed on 7 February 2018).
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of gps data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Gebhard, H.; Weber, G. NTRIP: Networked transport of rtcm via internet protocol—Internet radio technology for real-time gnss purposes. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 8–12 December 2003. [Google Scholar]
- Collins, P.; Gao, Y.; Lahaye, F.; Héroux, P.; Macleod, K.; Chen, K. Accessing and processing real-time gps corrections for precise point positioning … some user considerations. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1483–1491. [Google Scholar]
- Pérez, J.; Agrotis, L.; Fernández, J.; Garcia, C.; Dow, J. Esa/esoc real time data processing. In Proceedings of the IGS workshop 2006, Darmstadt, Germany, 8–11 May 2006. [Google Scholar]
- Zhang, X.; Li, X.; Guo, F. Satellite clock estimation at 1 hz for realtime kinematic ppp applications. GPS Solut. 2011, 15, 315–324. [Google Scholar] [CrossRef]
- El-Mowafy, A.; Deo, M.; Kubo, N. Maintaining real-time precise point positioning during outages of orbit and clock corrections. GPS Solut. 2017, 21, 937–947. [Google Scholar] [CrossRef]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time precise point positioning using igs real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. Igs Rts Precise Orbits and Clocks Verification and Quality Degradation over Time; Springer: New York, NY, USA, 2015; pp. 93–105. [Google Scholar]
- Ge, M.; Zhang, H.; Jia, X.; Song, S.; Wickert, J. What is achievable with the current compass constellation? GPS World 2012, 1, 29–34. [Google Scholar]
- Martín, A.; Hadas, T.; Dimas, A.; Anquela, A.B.; Berné, J.L. Influence of real-time products latency on kinematic ppp results. In Proceedings of the ESA 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Program, Braunschweig, Germany, 27–29 October 2015. [Google Scholar]
- Chen, Y.; Yuan, Y.; Ding, W.; Zhang, B.; Liu, T. Glonass pseudorange inter-channel biases considerations when jointly estimating gps and glonass clock offset. GPS Solut. 2017, 21, 1525–1533. [Google Scholar] [CrossRef]
- Song, W.; Yi, W.; Lou, Y.; Shi, C.; Yao, Y.; Liu, Y.; Mao, Y.; Xiang, Y. Impact of glonass pseudorange inter-channel biases on satellite clock corrections. GPS Solut. 2014, 18, 323–333. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ACs | IGS | BKG | DLR | ESA | GFZ | GMV | CNES | CAS |
|---|---|---|---|---|---|---|---|---|
| Products | IGS03 | CLK10 | CLK20 | CLK51 | CLK70 | CLK80 | CLK93 | CAS01 |
| System | G + R | G | G + R | G | G + R | G + R | G + R + C + E | G + R + C + E |
| Products | Orbits (cm) | Clocks (ns) | ||||
|---|---|---|---|---|---|---|
| R | A | C | 1DRMS | RMS | STD | |
| IGS03 | 5.79 | 8.04 | 7.02 | 7.01 | 0.35 | 0.19 |
| CLK10 | 2.76 | 4.17 | 3.56 | 3.54 | 0.79 | 0.29 |
| CLK20 | 2.48 | 3.97 | 2.94 | 3.19 | 0.43 | 0.12 |
| CLK51 | 2.09 | 3.29 | 2.74 | 2.75 | 0.46 | 0.13 |
| CLK70 | 5.14 | 7.46 | 6.11 | 6.31 | 0.32 | 0.18 |
| CLK80 | 5.05 | 7.19 | 5.95 | 6.13 | 0.31 | 0.17 |
| CLK93 | 2.19 | 3.50 | 2.79 | 2.88 | 0.45 | 0.14 |
| CAS01 | 5.01 | 6.77 | 5.67 | 5.86 | 0.69 | 0.19 |
| Products | Orbit/Clock Update Interval | Latency of Orbit/Clock |
|---|---|---|
| CLK10 | 60 s/5 s | 5 s |
| CLK20 | 5 s/5 s | 4 s |
| CLK51 | 5 s/5 s | 6 s |
| CLK70 | 10 s/5 s | 6 s |
| CLK80 | 5 s/5 s | 6 s |
| CLK93 | 5 s/5 s | 8 s |
| CAS01 | 1 s/1 s | 8 s |
| IGS03 | 60 s/10 s | 28 s |
| Products | Orbits (cm) | Clocks (ns) | ||||
|---|---|---|---|---|---|---|
| R | A | C | 1DRMS | RMS | STD | |
| IGS03 | 5.34 | 8.74 | 6.95 | 7.15 | 9.38 | 0.50 |
| CLK20 | 4.45 | 7.09 | 5.69 | 5.84 | 8.29 | 0.31 |
| CLK70 | 6.21 | 8.55 | 7.73 | 7.56 | 1.74 | 0.17 |
| CLK80 | 6.44 | 9.02 | 7.46 | 7.71 | 0.82 | 0.33 |
| CLK93 | 4.15 | 7.16 | 5.32 | 5.68 | 2.97 | 0.21 |
| CAS01 | 10.33 | 34.84 | 20.57 | 24.11 | 5.49 | 1.86 |
| System | Orbits (cm) | Clocks (ns) | ||||
|---|---|---|---|---|---|---|
| R | A | C | 1DRMS | RMS | STD | |
| BDS | 7.83 | 14.75 | 18.85 | 14.54 | 3.00 | 0.32 |
| Galileo | 3.21 | 5.39 | 4.41 | 4.42 | 0.39 | 0.18 |
| Index | Items | Processing Strategies |
|---|---|---|
| 1. | Rover coordinates | Real-time estimation; initial value determined by SPP |
| 2. | Ionospheric delay | Ionosphere-free combination |
| 3. | Satellite orbit and clock | SSR corrections + Broadcast Ephemeris |
| 4. | Receiver clock | Real-time estimation |
| 5. | Tropospheric delay | Saastamoinen model + real-time estimation |
| 6. | Antenna PCO/PCV | igs14.atx |
| 7. | Cut-off elevation angle | 7° |
| 8. | Ambiguity | Float |
| 9. | Cycle Slip | Detected by MW and GF |
| Stations | Direction (cm) | IGS IGS03 | BKG CLK10 | DLR CLK20 | ESA CLK51 | GFZ CLK70 | GMV CLK80 | CNES CLK93 | CAS CAS01 |
|---|---|---|---|---|---|---|---|---|---|
| CEDU | E | 1.94 | 3.75 | 3.09 | 2.63 | 3.16 | 2.91 | 2.04 | 3.82 |
| N | 3.62 | 3.61 | 4.75 | 3.13 | 4.22 | 2.98 | 2.81 | 0.12 | |
| U | 2.91 | 2.81 | 2.57 | 2.15 | 0.33 | 3.14 | 1.20 | 1.69 | |
| 3D | 5.04 | 5.91 | 6.22 | 4.62 | 5.28 | 5.21 | 3.67 | 4.17 | |
| AZU1 | E | 2.01 | 3.82 | 3.15 | 3.61 | 3.02 | 3.19 | 2.11 | 2.66 |
| N | 3.64 | 3.65 | 4.78 | 0.99 | 3.02 | 4.21 | 2.85 | 3.16 | |
| U | 2.88 | 2.79 | 2.62 | 2.65 | 3.11 | 0.38 | 1.18 | 2.17 | |
| 3D | 5.06 | 5.97 | 6.30 | 4.59 | 5.28 | 5.30 | 3.74 | 4.67 | |
| RVDI | E | 1.95 | 3.8 | 3.16 | 3.58 | 3.17 | 3.11 | 2.15 | 2.56 |
| N | 3.59 | 3.71 | 4.72 | 1.14 | 3.36 | 3.11 | 2.95 | 3.29 | |
| U | 2.68 | 2.73 | 2.48 | 2.35 | 2.45 | 2.97 | 1.13 | 2.67 | |
| 3D | 4.89 | 5.97 | 6.20 | 4.43 | 5.23 | 5.31 | 3.82 | 4.95 | |
| ORID | E | 1.81 | 3.88 | 3.12 | 3.53 | 3.05 | 3.2 | 2.01 | 2.59 |
| N | 3.49 | 3.55 | 4.3 | 1.04 | 3.03 | 4.06 | 3.26 | 3.25 | |
| U | 2.43 | 2.18 | 2.32 | 2.71 | 3.09 | 0.69 | 2.03 | 2.54 | |
| 3D | 4.62 | 5.69 | 5.80 | 4.57 | 5.29 | 5.22 | 4.33 | 4.87 | |
| STJO | E | 1.77 | 3.6 | 3.22 | 3.62 | 3.02 | 3.26 | 2.48 | 2.7 |
| N | 3.25 | 3.41 | 4.13 | 1.11 | 3.68 | 3.69 | 3.51 | 3.37 | |
| U | 1.98 | 2.45 | 2.15 | 2.61 | 2.48 | 3.14 | 1.93 | 2.44 | |
| 3D | 4.20 | 5.53 | 5.66 | 4.60 | 5.37 | 5.84 | 4.71 | 4.96 | |
| SALU | E | 2.15 | 3.41 | 3.37 | 3.56 | 3.12 | 3.09 | 2.72 | 2.46 |
| N | 3.91 | 3.71 | 4.36 | 0.95 | 3.21 | 3.82 | 3.44 | 3.52 | |
| U | 1.74 | 2.37 | 2.02 | 2.42 | 3.15 | 3.32 | 1.36 | 2.27 | |
| 3D | 4.79 | 5.57 | 5.87 | 4.41 | 5.47 | 5.93 | 4.59 | 4.86 | |
| CAS1 | E | 1.66 | 3.25 | 3.12 | 3.47 | 3.06 | 3.15 | 2.25 | 2.32 |
| N | 3.66 | 3.83 | 4.17 | 1.32 | 4.2 | 4.36 | 3.33 | 3.61 | |
| U | 1.85 | 2.28 | 2.22 | 2.53 | 0.91 | 0.77 | 1.45 | 2.53 | |
| 3D | 4.42 | 5.52 | 5.66 | 4.49 | 5.28 | 5.43 | 4.27 | 4.98 | |
| CHOF | E | 1.73 | 3.02 | 3.21 | 3.33 | 3.16 | 3.01 | 2.07 | 2.23 |
| N | 3.71 | 3.99 | 4.02 | 1.25 | 3.69 | 3.14 | 3.02 | 3.85 | |
| U | 1.92 | 2.02 | 2.05 | 2.81 | 1.83 | 3.18 | 1.55 | 2.55 | |
| 3D | 4.52 | 5.40 | 5.54 | 4.53 | 5.19 | 5.39 | 3.98 | 5.13 | |
| RIO2 | E | 1.87 | 3.01 | 3.12 | 3.67 | 3.19 | 3.22 | 1.94 | 2.44 |
| N | 3.55 | 3.7 | 4.21 | 1.04 | 3.78 | 3.64 | 3.51 | 3.59 | |
| U | 1.68 | 1.93 | 2.13 | 2.36 | 1.91 | 3.02 | 1.64 | 2.47 | |
| 3D | 4.35 | 5.15 | 5.66 | 4.49 | 5.30 | 5.72 | 4.33 | 4.99 | |
| HARB | E | 1.91 | 3.32 | 3.17 | 3.51 | 3.16 | 3.2 | 1.83 | 2.32 |
| N | 3.46 | 3.51 | 3.66 | 1.23 | 3.45 | 3.34 | 3.57 | 3.45 | |
| U | 1.82 | 1.73 | 2.00 | 2.87 | 2.01 | 2.95 | 1.77 | 2.29 | |
| 3D | 4.32 | 5.17 | 5.26 | 4.70 | 5.09 | 5.50 | 4.36 | 4.79 | |
| Average | E | 1.88 | 3.49 | 3.17 | 3.45 | 3.11 | 3.13 | 2.16 | 2.61 |
| N | 3.59 | 3.67 | 4.31 | 1.32 | 3.56 | 3.64 | 3.23 | 3.12 | |
| U | 2.19 | 2.33 | 2.26 | 2.55 | 2.13 | 2.36 | 1.52 | 2.36 | |
| 3D | 4.62 | 5.59 | 5.82 | 4.54 | 5.28 | 5.48 | 4.18 | 4.84 |
| Stations | Direction (cm) | IGS IGS03 | BKG CLK10 | DLR CLK20 | ESA CLK51 | GFZ CLK70 | GMV CLK80 | CNES CLK93 | CAS CAS01 |
|---|---|---|---|---|---|---|---|---|---|
| CEDU | E | 3.36 | 2.74 | 2.24 | 3.78 | 6.02 | 4.89 | 1.75 | 5.03 |
| N | 3.86 | 2.51 | 1.89 | 1.96 | 3.76 | 2.60 | 1.67 | 2.57 | |
| U | 5.95 | 6.68 | 7.00 | 5.08 | 7.12 | 8.31 | 6.36 | 9.53 | |
| 3D | 7.85 | 7.65 | 7.59 | 6.62 | 10.05 | 9.99 | 6.81 | 10.86 | |
| AZU1 | E | 5.56 | 3.43 | 2.48 | 3.84 | 5.81 | 3.72 | 2.01 | 3.95 |
| N | 5.84 | 2.02 | 1.96 | 2.64 | 1.86 | 2.60 | 1.62 | 2.28 | |
| U | 6.44 | 6.08 | 6.87 | 4.98 | 7.32 | 7.53 | 6.13 | 8.53 | |
| 3D | 10.31 | 7.27 | 7.56 | 6.82 | 9.53 | 8.79 | 6.65 | 9.67 | |
| RVDI | E | 4.83 | 3.39 | 2.88 | 2.56 | 4.99 | 4.19 | 4.45 | 4.81 |
| N | 4.71 | 2.34 | 1.86 | 1.78 | 3.24 | 2.58 | 2.03 | 3.22 | |
| U | 6.02 | 6.71 | 6.54 | 5.99 | 6.99 | 7.76 | 5.33 | 8.56 | |
| 3D | 9.04 | 7.87 | 7.38 | 6.75 | 9.18 | 9.19 | 7.23 | 10.33 | |
| ORID | E | 5.17 | 2.68 | 2.49 | 2.81 | 5.12 | 4.13 | 3.03 | 4.11 |
| N | 4.06 | 1.93 | 2.04 | 1.90 | 3.99 | 2.54 | 2.52 | 2.48 | |
| U | 5.98 | 5.99 | 7.13 | 5.88 | 7.41 | 8.49 | 4.89 | 9.67 | |
| 3D | 8.88 | 6.84 | 7.82 | 6.79 | 9.85 | 9.78 | 6.28 | 10.79 | |
| STJO | E | 4.41 | 3.16 | 2.37 | 3.78 | 3.84 | 5.66 | 1.82 | 4.81 |
| N | 4.51 | 1.70 | 1.98 | 2.07 | 2.64 | 3.79 | 1.55 | 2.85 | |
| U | 5.79 | 7.33 | 6.96 | 6.01 | 8.73 | 7.42 | 6.43 | 9.34 | |
| 3D | 8.56 | 8.16 | 7.34 | 7.40 | 9.89 | 10.07 | 6.86 | 10.89 | |
| SALU | E | 5.47 | 2.22 | 3.73 | 2.75 | 4.91 | 4.32 | 3.48 | 5.16 |
| N | 4.06 | 1.85 | 2.86 | 1.88 | 3.67 | 2.40 | 2.33 | 2.63 | |
| U | 6.07 | 6.78 | 6.44 | 5.63 | 7.41 | 8.61 | 5.33 | 8.98 | |
| 3D | 9.12 | 7.37 | 7.97 | 6.54 | 9.62 | 9.92 | 6.78 | 10.68 | |
| CAS1 | E | 4.77 | 3.19 | 2.45 | 4.01 | 6.13 | 4.94 | 2.12 | 4.26 |
| N | 3.62 | 2.21 | 1.78 | 1.88 | 2.65 | 2.59 | 1.83 | 2.52 | |
| U | 5.11 | 6.93 | 6.89 | 5.68 | 8.03 | 7.81 | 6.16 | 9.83 | |
| 3D | 7.87 | 7.94 | 7.53 | 7.20 | 10.44 | 9.60 | 6.77 | 11.01 | |
| CHOF | E | 5.02 | 3.68 | 4.57 | 3.13 | 5.24 | 3.99 | 2.86 | 3.91 |
| N | 5.94 | 1.74 | 2.05 | 1.99 | 2.84 | 2.06 | 1.71 | 2.00 | |
| U | 6.74 | 6.89 | 5.72 | 5.98 | 8.01 | 8.57 | 6.73 | 10.06 | |
| 3D | 10.29 | 8.00 | 7.60 | 7.04 | 9.98 | 9.67 | 7.51 | 11.71 | |
| RIO2 | E | 4.33 | 2.89 | 2.92 | 3.23 | 5.53 | 4.73 | 2.11 | 4.74 |
| N | 5.15 | 2.10 | 1.76 | 2.34 | 2.35 | 1.83 | 1.97 | 1.74 | |
| U | 6.54 | 6.76 | 7.09 | 5.46 | 7.24 | 7.94 | 6.88 | 8.67 | |
| 3D | 9.38 | 7.64 | 7.87 | 6.76 | 9.41 | 9.42 | 7.46 | 10.03 | |
| HARB | E | 4.68 | 3.14 | 2.48 | 4.01 | 5.88 | 5.01 | 2.12 | 5.65 |
| N | 5.51 | 2.24 | 1.96 | 1.91 | 3.69 | 3.08 | 2.01 | 2.25 | |
| U | 6.02 | 6.40 | 6.79 | 6.08 | 7.37 | 7.76 | 6.09 | 8.84 | |
| 3D | 9.41 | 7.47 | 7.49 | 7.52 | 10.12 | 9.99 | 6.75 | 10.72 | |
| Average | E | 4.76 | 3.05 | 2.86 | 3.39 | 5.35 | 4.56 | 2.58 | 4.64 |
| N | 4.73 | 2.06 | 2.02 | 2.04 | 3.07 | 2.61 | 1.92 | 2.45 | |
| U | 6.07 | 6.65 | 6.74 | 5.67 | 7.56 | 8.02 | 6.03 | 8.84 | |
| 3D | 9.07 | 7.62 | 7.62 | 6.94 | 9.81 | 9.64 | 6.91 | 10.67 |
| City | Product | System | Accuracy (m) | Available Epochs | |
|---|---|---|---|---|---|
| Horizontal | Vertical | ||||
| Beijing | CLK93 | GPS | 0.47 | 0.78 | 8005 |
| GPS + BDS | 0.46 | 0.73 | 8023 | ||
| CAS01 | GPS | 0.60 | 0.77 | 8005 | |
| GPS + BDS | 0.56 | 0.74 | 8023 | ||
| Tianjin | CLK93 | GPS | 0.63 | 1.06 | 4615 |
| GPS + BDS | 0.51 | 0.50 | 4758 | ||
| CAS01 | GPS | 1.38 | 0.92 | 4615 | |
| GPS + BDS | 1.29 | 0.89 | 4758 | ||
| Shijiazhuang | CLK93 | GPS | 0.62 | 1.14 | 5500 |
| GPS + BDS | 0.53 | 0.83 | 5591 | ||
| CAS01 | GPS | 0.60 | 1.16 | 5500 | |
| GPS + BDS | 0.53 | 1.08 | 5591 | ||
| Average | CLK93 | GPS | 0.58 | 1.01 | 18,120 |
| GPS + BDS | 0.50 | 0.70 | 18,372 | ||
| CAS01 | GPS | 0.94 | 0.96 | 18,120 | |
| GPS + BDS | 0.87 | 0.91 | 18,372 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS Int. J. Geo-Inf. 2018, 7, 85. https://doi.org/10.3390/ijgi7030085
Wang Z, Li Z, Wang L, Wang X, Yuan H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS International Journal of Geo-Information. 2018; 7(3):85. https://doi.org/10.3390/ijgi7030085
Chicago/Turabian StyleWang, Zhiyu, Zishen Li, Liang Wang, Xiaoming Wang, and Hong Yuan. 2018. "Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers" ISPRS International Journal of Geo-Information 7, no. 3: 85. https://doi.org/10.3390/ijgi7030085
APA StyleWang, Z., Li, Z., Wang, L., Wang, X., & Yuan, H. (2018). Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS International Journal of Geo-Information, 7(3), 85. https://doi.org/10.3390/ijgi7030085