A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation


Abstract
:1. Introduction
2. Architecture of the Proposed Indoor Localisation System
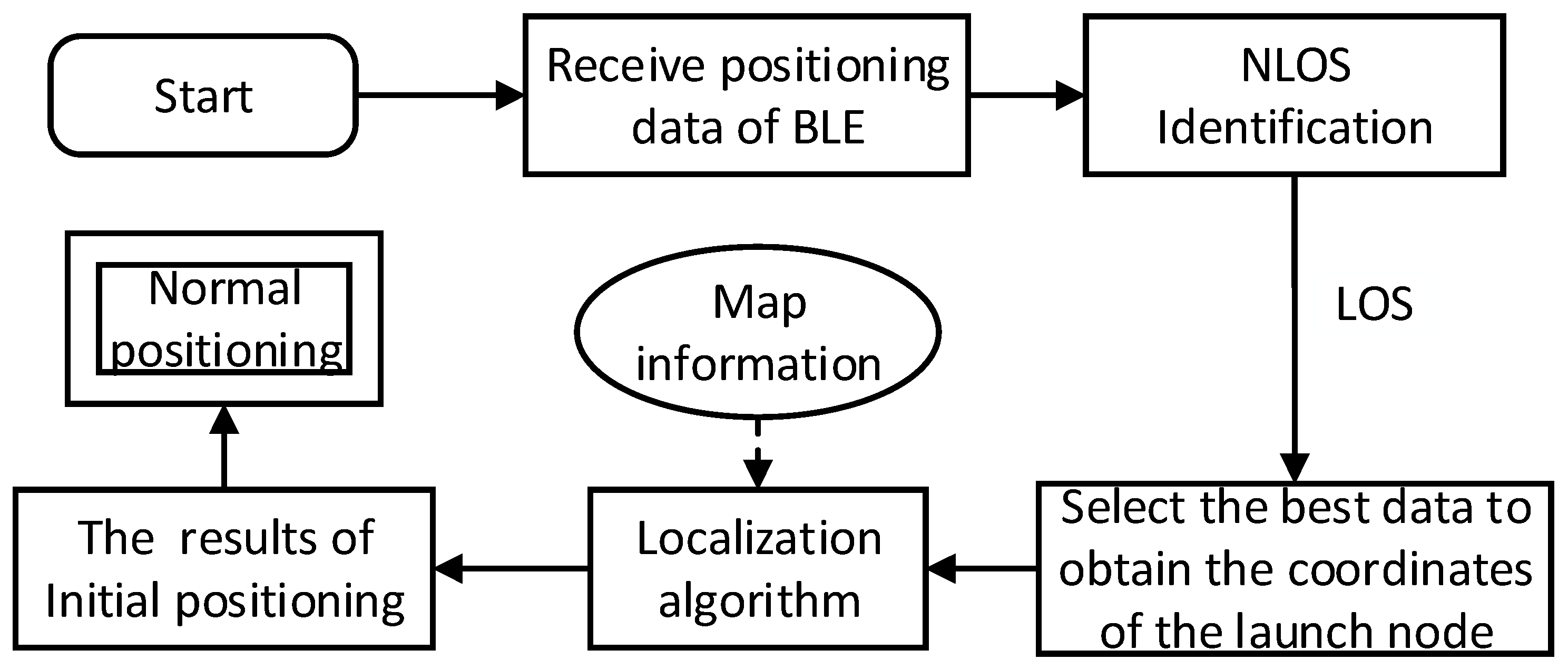
2.1. The Initial Positioning
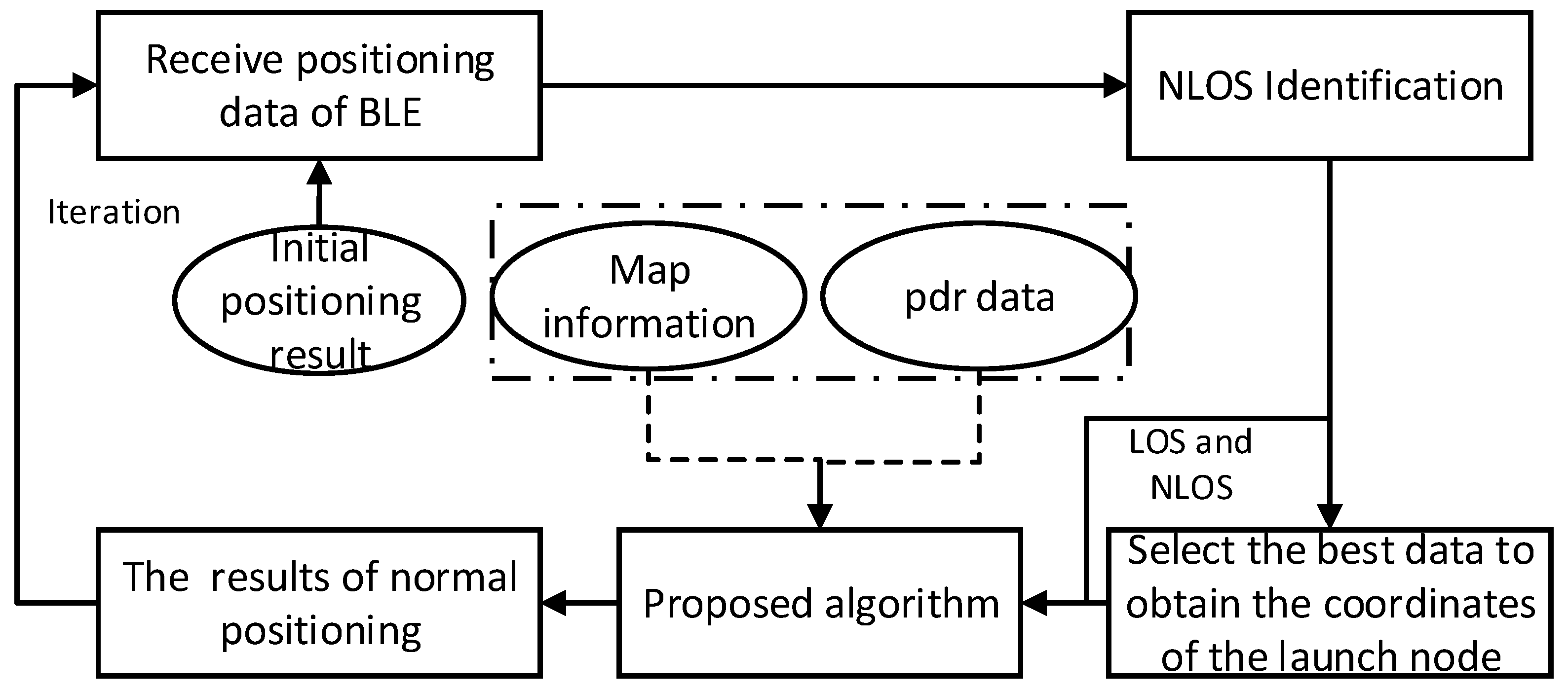
2.2. The Normal Positioning
3. BLE and PDR-Based Probabilistic Position Selection Algorithm
3.1. Generation of Random Particles
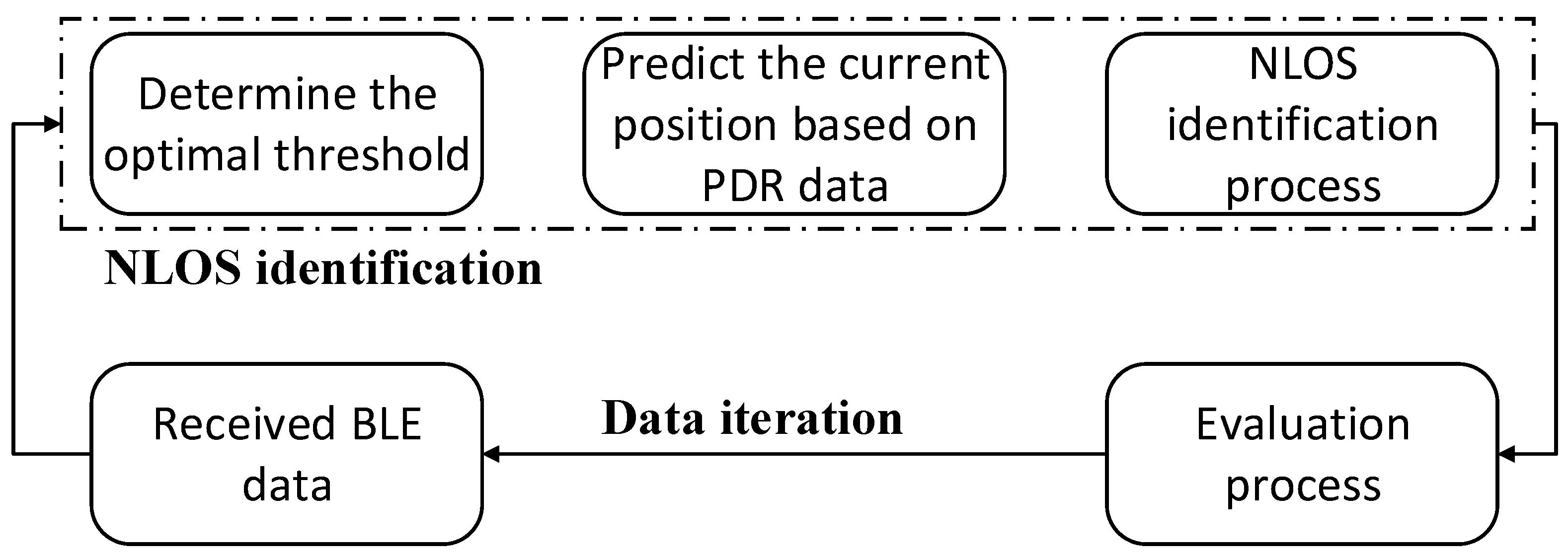
3.2. NLOS Identification
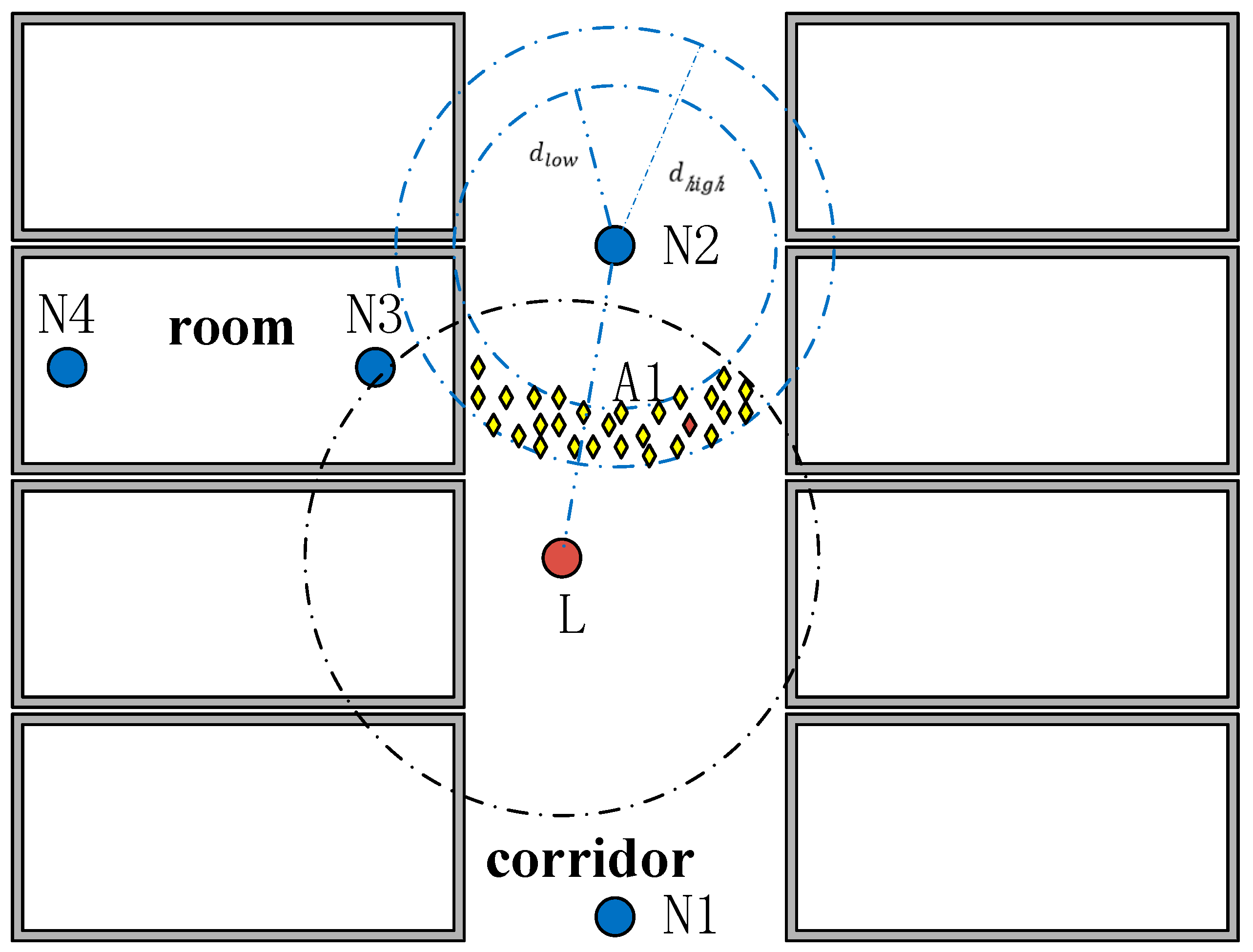
3.3. Particle Selection
3.4. Evaluation Process of Particles
| Algorithm 1: PPSA Algorithm |
| Input: The coordinates of BLE beacons , the measured RSSI data, the measured PDR data |
| Output: The positioning result |
| Start |
| 1. Input last positioning result |
| 2. Set the radius of generating particles |
| 3. Generate random particles |
| 4. NLOS identification and correction |
| 5. FOR ( to the number of particles) |
| 6. RUN Particles selection |
| 7. IF particle in the selection area |
| 8. RUN evaluation process |
| 9. IF |
| 10. |
| 11. |
| 12. ELSE |
| 13. Discard the propagation path j |
| 14. |
| 15. |
| 16. |
| 17. ELSE |
| 18. Discard this particle |
| 19. END IF |
| 20. END FOR |
| 21. Get the positioning result of this time slot |
| 22. Repeat step 1 |
| END |
4. Experimental Results
4.1. Evaluation of Proposed PPSA Algorithm
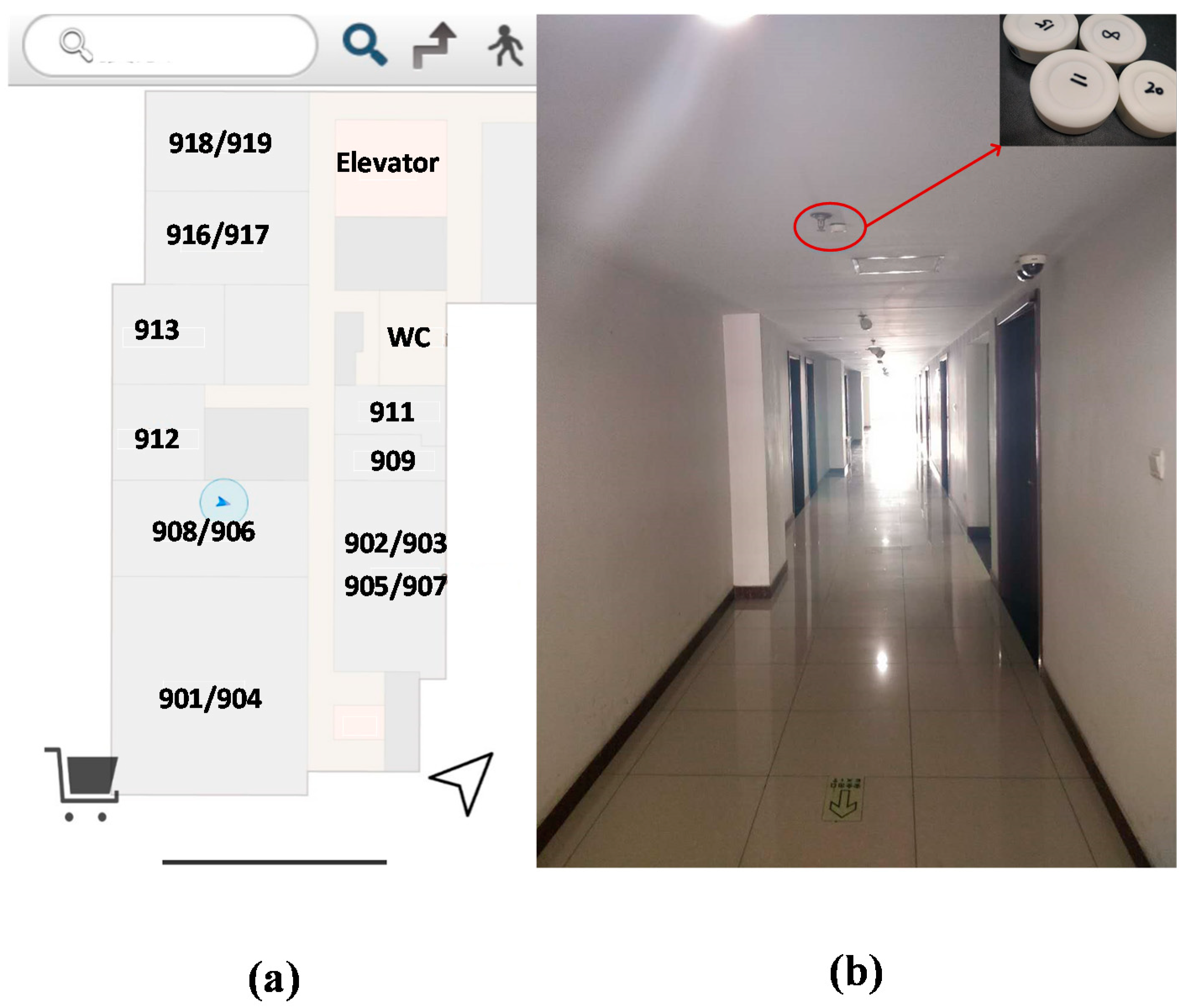
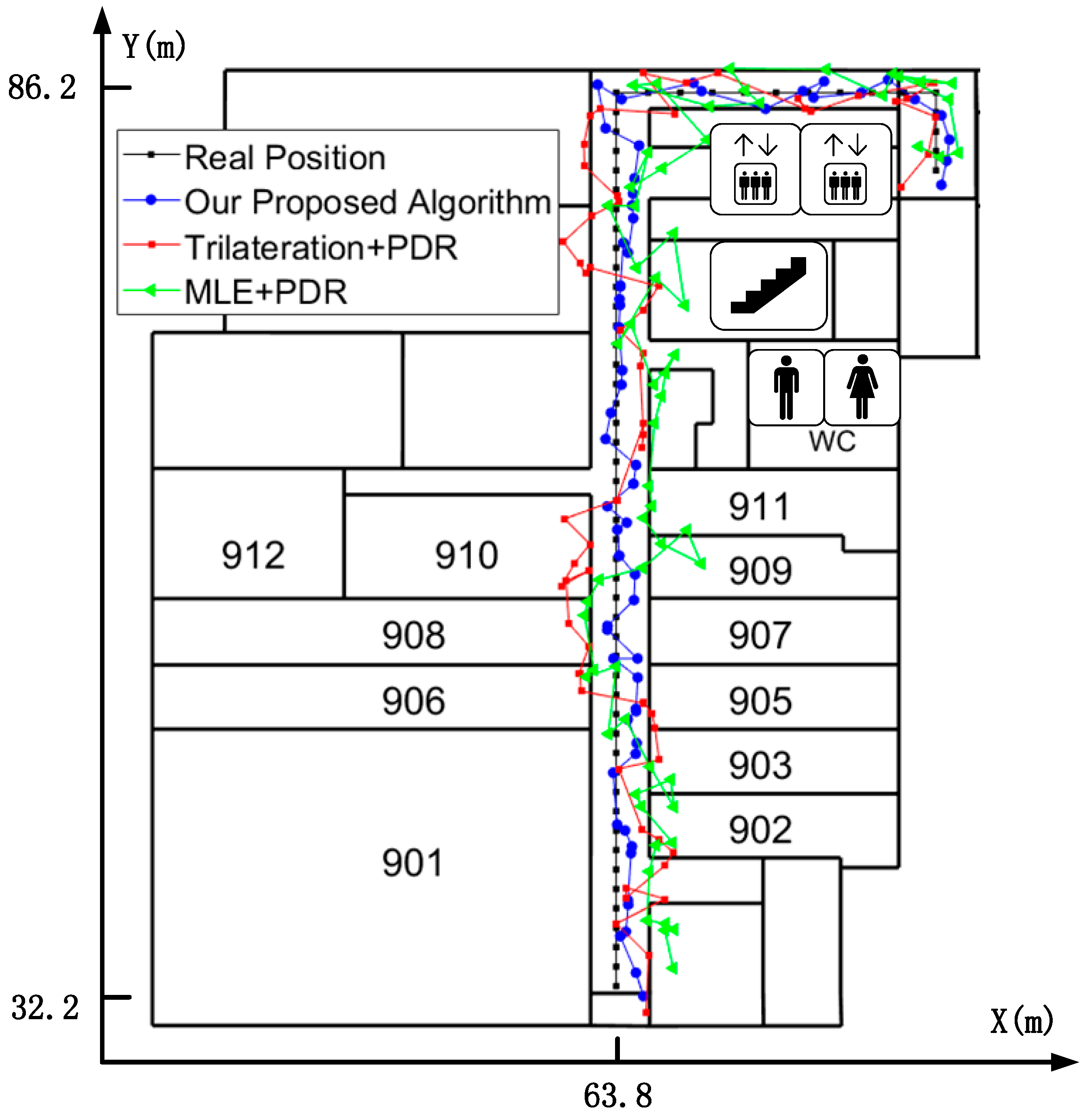
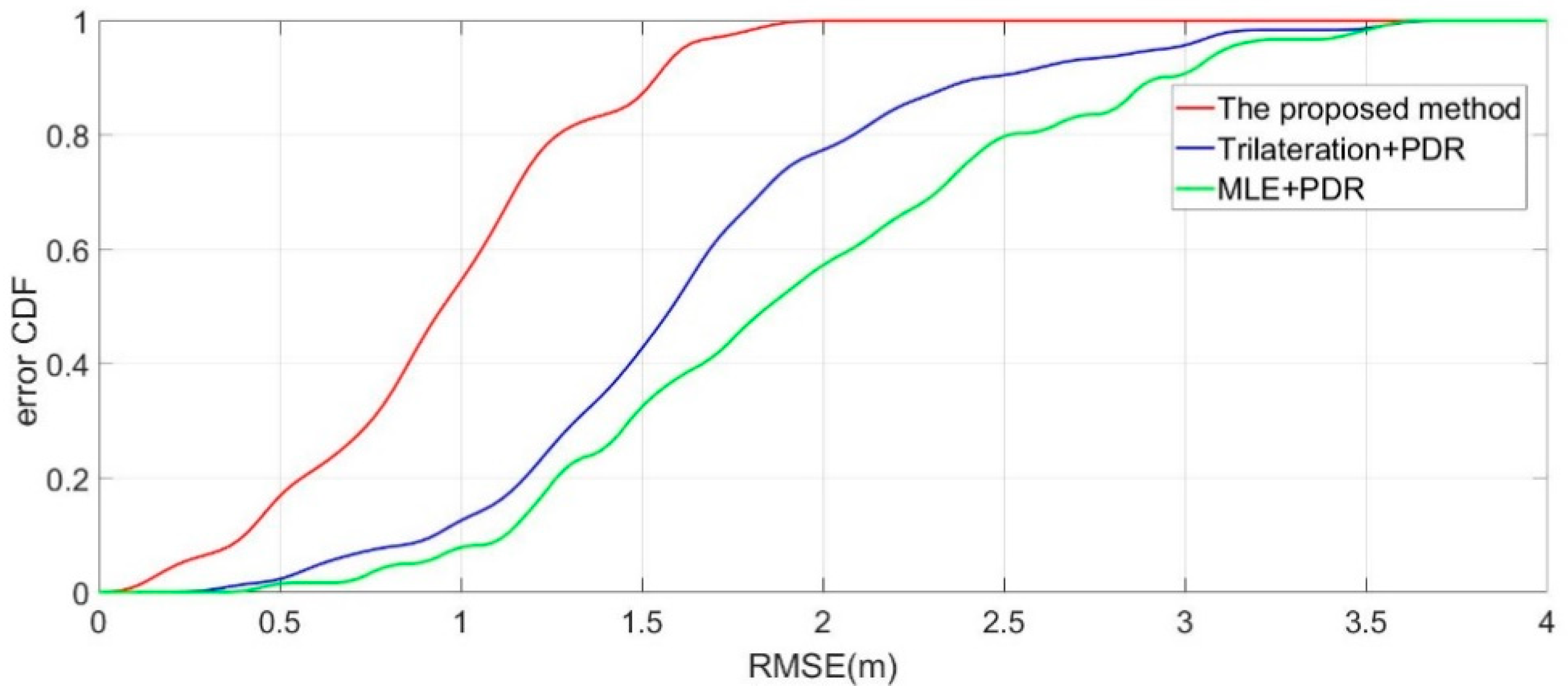
4.1.1. Experiments in the Test Scenario
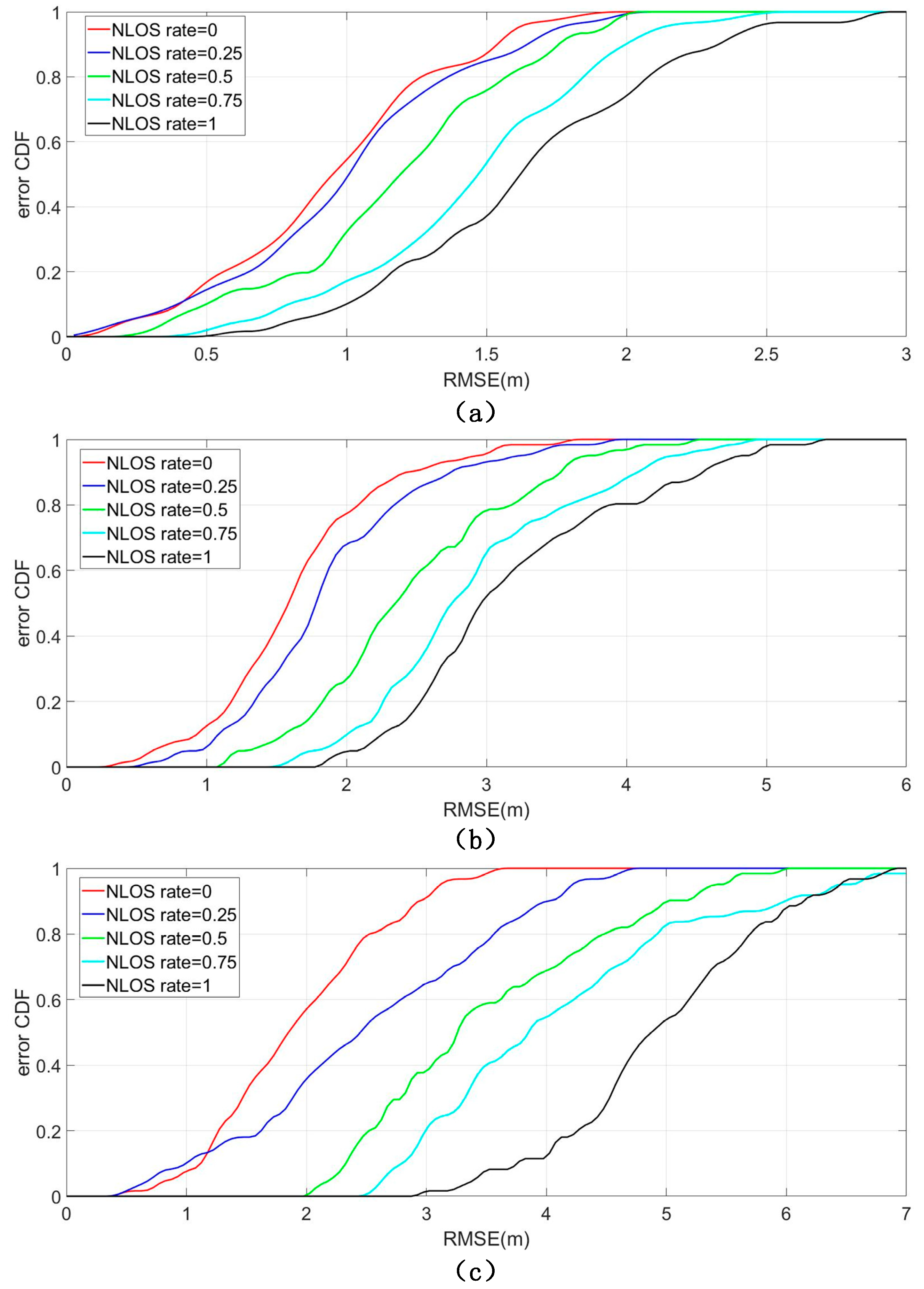
4.1.2. RMSE Changing Compared with the NLOS Rate
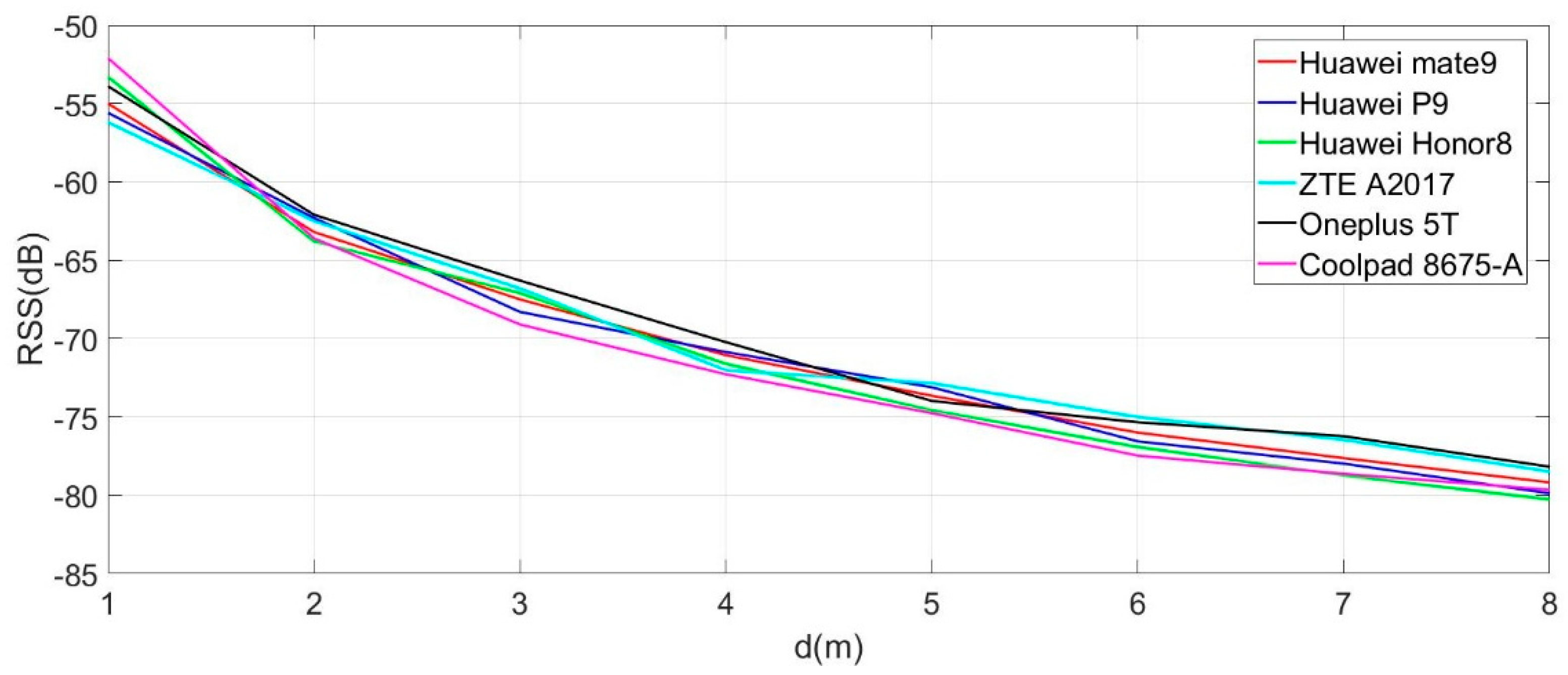
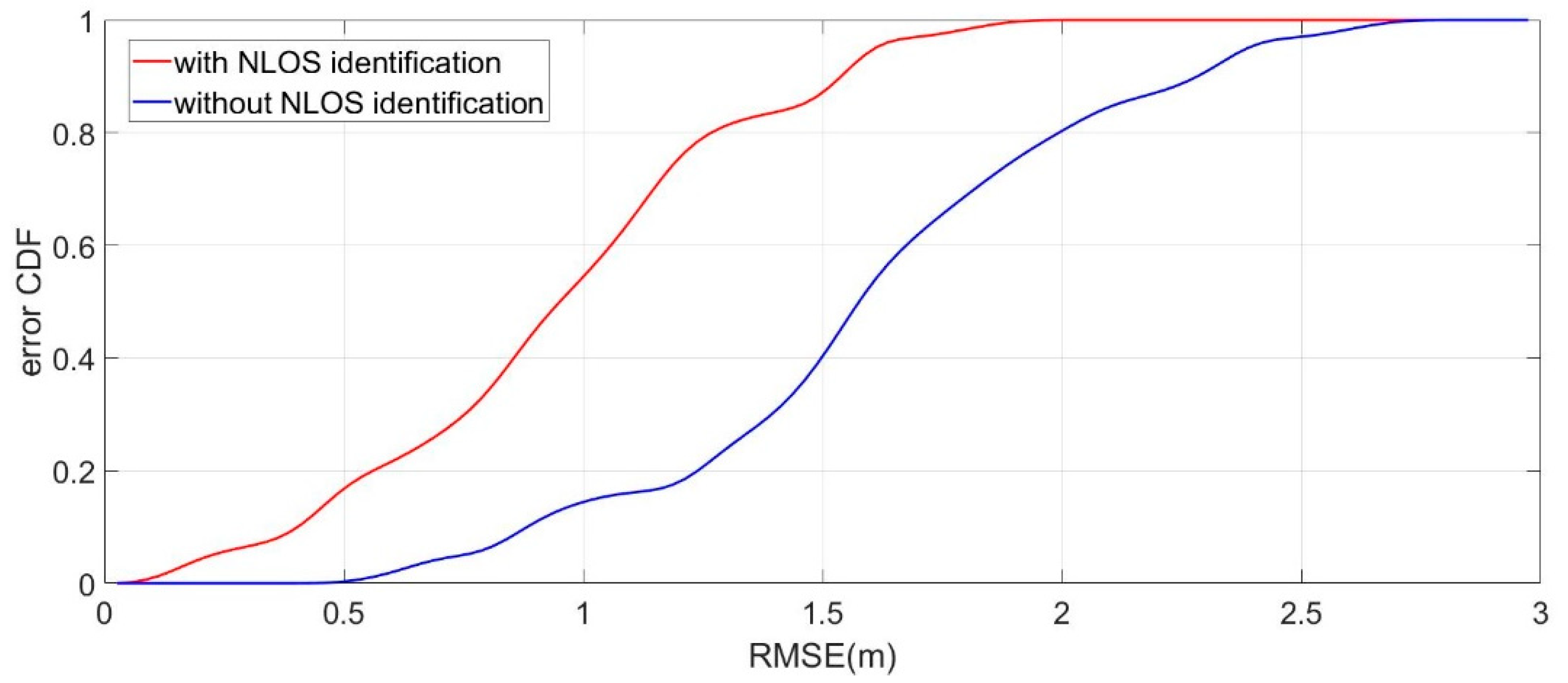
4.2. Evaluation of Proposed NLOS Identification Method
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cheng, L.; Wu, H.; Wu, C.D.; Zhang, Y.Z. Indoor Mobile Localisation in Wireless Sensor Network under Unknown NLOS Errors. Int. J. Distrib. Sens. Netw. 2013, 9, 208904. [Google Scholar] [CrossRef]
- Liu, H.B.; Yang, J.; Sidhom, S.; Wang, Y.; Chen, Y.Y.; Ye, F. Accurate WiFi Based Localisation for Smartphones Using Peer Assistance. IEEE Trans. Mob. Comput. 2014, 13, 2199–2214. [Google Scholar] [CrossRef]
- Woo, S.; Jeong, S.; Mok, E.; Xia, L.; Choi, C.; Pyeon, M.; Heo, J. Application of WiFi-based indoor positioning system for labor tracking at construction sites: A case study in Guangzhou MTR. Autom. Constr. 2011, 20, 3–13. [Google Scholar] [CrossRef]
- Tesoriero, R.; Tebar, R.; Gallud, J.A.; Lozano, M.D.; Penichet, V.M.R. Improving location awareness in indoor spaces using RFID technology. Expert Syst. Appl. 2010, 37, 894–898. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.H.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S.; Honorato, J.C.P.; Rosas, J.I.G. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.H.; Pyun, J.Y. Location Detection and Tracking of Moving Targets by a 2D IR-UWB Radar System. Sensors 2015, 15, 6740–6762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodas, J.; Barral, V.; Escudero, C.J. Architecture for Multi-Technology Real-Time Location Systems. Sensors 2013, 13, 2220–2253. [Google Scholar] [CrossRef] [PubMed]
- Taponecco, L.; D’Amico, A.A.; Mengali, U. Joint TOA and AOA Estimation for UWB Localisation Applications. IEEE Trans. Wirel. Commun. 2011, 10, 2207–2217. [Google Scholar] [CrossRef]
- Zhou, Y.; Law, C.L.; Guan, Y.L.; Chin, F. Indoor Elliptical Localisation Based on Asynchronous UWB Range Measurement. IEEE Trans. Instrum. Meas. 2011, 60, 248–257. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the 2013 IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 837–842. [Google Scholar]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localisation with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Hazas, M.; Hopper, A. Broadband ultrasonic location systems for improved indoor positioning. IEEE Trans. Mob. Comput. 2006, 5, 536–547. [Google Scholar] [CrossRef] [Green Version]
- Medina, C.; Segura, J.C.; de la Torre, A. Ultrasound Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomez, C.; Oller, J.; Paradells, J. Overview and Evaluation of Bluetooth Low Energy: An Emerging Low-Power Wireless Technology. Sensors 2012, 12, 11734–11753. [Google Scholar] [CrossRef] [Green Version]
- Fang, S.-H.; Lin, T.-N.; Lee, K.-C. A novel algorithm for multipath fingerprinting in indoor WLAN environments. IEEE Trans. Wirel. Commun. 2008, 7, 3579–3588. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-Signal-Strength-Based Indoor Positioning Using Compressive Sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piché, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the 6th Workshop on Positioning, Navigation and Communication (WPNC 2009), Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar]
- Kaemarungsi, K.; Krishnamurthy, P. Modeling of indoor positioning systems based on location fingerprinting. In Proceedings of the Twenty-third AnnualJoint Conference of the IEEE Computer and Communications Societies INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1012–1022. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space: Wireless indoor localization with little human intervention. In Proceedings of the International Conference on Mobile Computing and NETWORKING, Istanbul, Turkey, 22–26 August 2012; ACM: New York, NY, USA, 2012; pp. 269–280. [Google Scholar]
- Crane, P.; Huang, Z.; Zhang, H. Emender: Signal filter for trilateration based indoor localisation. In Proceedings of the International Symposium on Personal, Indoor, and Mobile Radio Communications, Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar]
- Hashim, M.S.M.; Aman, M.A.S.S.; Wai, L.K.; Yap, T.J.; Safar, M.J.A. Indoor Localisation Approach based on Received Signal Strength (RSS) and Trilateration Technique. In Proceedings of the International Conference on Mathematics, Engineering and Industrial Applications, Songkhla, Thailand, 10–12 August 2016; Rusli, N., Zaimi, W., Khazali, K.A.M., Masnan, M.J., Daud, W.S.W., Abdullah, N., Yahya, Z., Amin, N.A.M., Aziz, N.H.A., Yusuf, Y.N.A., Eds.; AIP Publishing: Melville, NY, USA, 2016; Volume 1775. [Google Scholar]
- Rusli, M.E.; Ali, M.; Jamil, N.; Din, M.M. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT). In Proceedings of the International Conference on Computer and Communication Engineering IEEE, Kuala Lumpur, Malaysia, 26–27 July 2016; pp. 72–77. [Google Scholar]
- Miura, H.; Sakamoto, J.; Matsuda, N.; Taki, H.; Abe, N.; Hori, S. Adequate RSSI determination method by making use of SVM for indoor localisation. In Proceedings of the Knowledge-Based Intelligent Information and Engineering Systems, Bournemouth, UK, 9–11 October 2006; Gabrys, B., Howlett, R.J., Jain, L.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4252, pp. 628–636. [Google Scholar]
- Zou, H.; Huang, B.; Lu, X.; Jiang, H.; Xie, L. A Robust Indoor Positioning System Based on the Procrustes Analysis and Weighted Extreme Learning Machine. IEEE Trans. Wirel. Commun. 2016, 15, 1252–1266. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B.; Soibelman, L. Iterative Maximum Likelihood Estimation Algorithm: Leveraging Building Information and Sensing Infrastructure for Localisation during Emergencies. J. Comput. Civ. Eng. 2015, 29, 04014094. [Google Scholar] [CrossRef]
- Park, J.; Cho, Y.K. Development and Evaluation of a Probabilistic Local Search Algorithm for Complex Dynamic Indoor Construction Sites. J. Comput. Civ. Eng. 2017, 31, 13. [Google Scholar] [CrossRef]
- Li, J.; Guo, M.; Li, S. An indoor localization system by fusing smartphone inertial sensors and bluetooth low energy beacons. In Proceedings of the International Conference on Frontiers of Sensors Technologies, Shenzhen, China, 14–16 April 2017; pp. 317–321. [Google Scholar]
- Ligorio, G.; Sabatini, A.M. A Novel Kalman Filter for Human Motion Tracking With an Inertial-Based Dynamic Inclinometer. IEEE Trans. Biomed. Eng. 2015, 62, 2033–2043. [Google Scholar] [CrossRef] [PubMed]
- Foxlin, E. Pedestrian Tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Li, X.H.; Wei, D.Y.; Lai, Q.F.; Xu, Y.; Yuan, H. Smartphone-based integrated PDR/GPS/Bluetooth pedestrian location. Adv. Space Res. 2017, 59, 877–887. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.Y.; Zhang, L.W.; Li, Z.K. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef]
- Li, Z.K.; Liu, C.Y.; Gao, J.X.; Li, X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 224. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.Y. A Bluetooth/PDR Integration Algorithm for an Indoor Positioning System. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. A review of pedestrian indoor positioning systems for mass market applications. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef] [PubMed]
- Ciabattoni, L.; Foresi, G.; Monteriù, A.; Pepa, L.; Pagnotta, D.P.; Spalazzi, L.; Verdini, F. Real time indoor localization integrating a model based pedestrian dead reckoning on smartphone and BLE beacons. J. Ambient Intell. Huma. Comput. 2017, 1–12. [Google Scholar] [CrossRef]
- Ivanov, R. An Algorithm for Micro-localization in Large Public Buildings. In Proceedings of the 18th International Conference on Computer Systems and Technologies, Ruse, Bulgaria, 23–24 June 2017; ACM: New York, NY, USA, 2017; pp. 119–126. [Google Scholar]
- Klingbeil, L.; Wark, T. A Wireless Sensor Network for Real-Time Indoor Localisation and Motion Monitoring. In Proceedings of the International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 543–544. [Google Scholar]
- Gusenbauer, D.; Isert, C.; Krösche, J. Self-contained indoor positioning on off-the-shelf mobile devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–9. [Google Scholar]
- Guvenc, I.; Chong, C.C.; Watanabe, F. NLOS Identification and Mitigation for UWB Localization Systems. In Proceedings of the Wireless Communications and Networking Conference, Kowloon, China, 11–15 March 2007; pp. 1571–1576. [Google Scholar]
- Maali, A.; Ouldali, A.; Mimoun, H.; Baudoin, G. Joint TOA Estimation and NLOS Identification for UWB Localization Systems. In Proceedings of the Third International Conference on Sensor Technologies and Applications, Athens, Greece, 18–23 June 2009; IEEE Computer Society: Washington, DC, USA, 2009; pp. 212–216. [Google Scholar]
- Khodjaev, J.; Park, Y.; Malik, A.S. Survey of NLOS identification and error mitigation problems in UWB-based positioning algorithms for dense environments. Ann. Telecommun. 2010, 65, 301–311. [Google Scholar] [CrossRef]
- Marano, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS Identification and Mitigation for Localisation Based on UWB Experimental Data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Yu, K.; Guo, Y.J. Statistical NLOS Identification Based on AOA, TOA, and Signal Strength. IEEE Trans. Veh. Technol. 2009, 58, 274–286. [Google Scholar] [CrossRef]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N.; Blunsom, P.; Frolik, J. Non-Line-of-Sight Identification and Mitigation Using Received Signal Strength. IEEE Trans. Wirel. Commun. 2015, 14, 1689–1702. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beacon ID | Coordinates | Beacon ID | Coordinates |
|---|---|---|---|
| 1 | (63.8, 30.5) | 17 | (76.1, 83.1) |
| 2 | (63.8, 38.5) | 18 | (69.8, 81.2) |
| 3 | (63.8, 44.5) | 19 | (68.8, 76.5) |
| 4 | (63.8, 50) | 20 | (71.9, 76.5) |
| 5 | (63.8, 55.6) | 21 | (68.8, 38.5) |
| 6 | (63.8, 59.9) | 22 | (47.7, 50) |
| 7 | (63.8, 63.2) | 23 | (51.5, 51.4) |
| 8 | (55.8, 63.6) | 24 | (60.2, 49.1) |
| 9 | (63.8, 66.6) | 25 | (47.5, 53.8) |
| 10 | (63.8, 71.3) | 26 | (51.5, 51.4) |
| 11 | (68, 71.3) | 27 | (59.1, 54) |
| 12 | (63.8, 76.5) | 28 | (72.9, 53.6) |
| 13 | (63.8, 82) | 29 | (69.4, 53.6) |
| 14 | (63.8, 87.5) | 30 | (69.4, 49.8) |
| 15 | (71.7, 86.8) | 31 | (72.9, 50.6) |
| 16 | (76.1, 87.5) | 32 | (70.5, 38.6) |
| Phone Model | ||
|---|---|---|
| HUAWEI Mate 9 | 1.9 | 4.25 |
| HUAWEI P9 | 2.02 | 4.32 |
| HUAWEI Honor 8 | 1.96 | 4.19 |
| ZTE A2017 | 2.16 | 4.38 |
| ONEPLUS 5T | 1.88 | 3.98 |
| Coolpad 8675-A | 2.11 | 4.32 |
| Parameter | Value |
|---|---|
| Received Power at 1 m | −55 dBm |
| Path Loss Factor (LOS) | 2.7 |
| Mean Speed of PDR | 1.2 m/s |
| Mean Heading Angle of PDR | 2.4 |
| No. | True Positions | PPSA | Trilateration + PDR | MLE + PDR |
|---|---|---|---|---|
| 1 | (63.8, 32.2) | 1.15 | 1.93 | 2.43 |
| 2 | (63.8, 33.4) | 0.72 | 1.41 | 2.82 |
| 3 | (63.8, 34.6) | 0.69 | 1.46 | 2.43 |
| 4 | (63.8, 35.8) | 0.71 | 2.54 | 2.03 |
| 5 | (63.8, 37) | 0.53 | 1.34 | 1.41 |
| 6 | (63.8, 38.2) | 0.81 | 0.67 | 1.62 |
| 7 | (63.8, 39.4) | 1.09 | 1.84 | 1.93 |
| 8 | (63.8, 40.6) | 0.59 | 2.11 | 2.12 |
| 9 | (63.8, 41.8) | 0.39 | 1.73 | 1.77 |
| 10 | (63.8, 43) | 0.76 | 1.52 | 1.28 |
| 11 | (63.8, 44.2) | 1.48 | 1.41 | 2.18 |
| 12 | (63.8, 45.4) | 1.51 | 1.78 | 3.03 |
| 13 | (63.8, 46.6) | 1.39 | 2.08 | 1.93 |
| 14 | (63.8, 47.8) | 0.85 | 1.83 | 0.95 |
| 15 | (63.8, 49) | 0.77 | 1.24 | 1.45 |
| 16 | (63.8, 50.2) | 1.14 | 1.13 | 1.68 |
| 17 | (63.8, 51.4) | 0.68 | 1.64 | 1.91 |
| 18 | (63.8, 52.6) | 0.25 | 1.74 | 1.66 |
| 19 | (63.8, 53.8) | 1.38 | 2.54 | 1.98 |
| 20 | (63.8, 55) | 0.85 | 2.02 | 2.44 |
| 21 | (63.8, 56.2) | 1.46 | 2.24 | 2.27 |
| 22 | (63.8, 57.4) | 1.50 | 1.89 | 1.95 |
| 23 | (63.8, 58.6) | 1.15 | 1.23 | 2.15 |
| 24 | (63.8, 59.8) | 0.98 | 1.54 | 2.51 |
| 25 | (63.8, 61) | 1.31 | 2.37 | 2.31 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, K.; Xing, H.; Deng, Z.; Du, Y. A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation. ISPRS Int. J. Geo-Inf. 2018, 7, 232. https://doi.org/10.3390/ijgi7060232
Han K, Xing H, Deng Z, Du Y. A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation. ISPRS International Journal of Geo-Information. 2018; 7(6):232. https://doi.org/10.3390/ijgi7060232
Chicago/Turabian StyleHan, Ke, Huashuai Xing, Zhongliang Deng, and Yichen Du. 2018. "A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation" ISPRS International Journal of Geo-Information 7, no. 6: 232. https://doi.org/10.3390/ijgi7060232
APA StyleHan, K., Xing, H., Deng, Z., & Du, Y. (2018). A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation. ISPRS International Journal of Geo-Information, 7(6), 232. https://doi.org/10.3390/ijgi7060232