Comparison of Communication Viewsheds Derived from High-Resolution Digital Surface Models Using Line-of-Sight, 2D Fresnel Zone, and 3D Fresnel Zone Analysis



Abstract
:1. Introduction
2. Communication Viewsheds Determined by LOS, 2D Fresnel Zone, and 3D Fresnel Zone Analysis
3. Principles of LOS, 2D Fresnel Zone, and 3D Fresnel Zone Analysis Methods
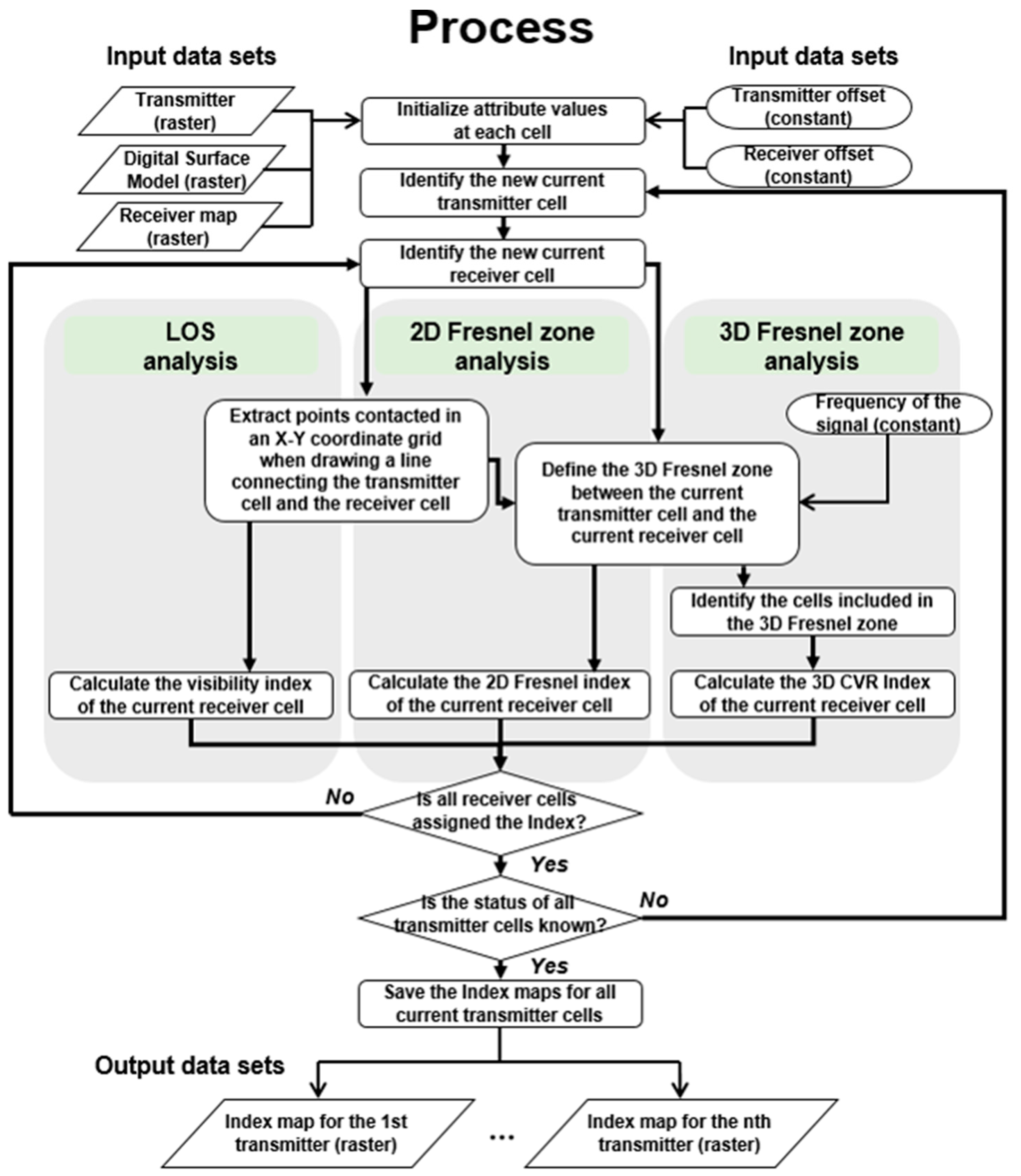
3.1. LOS Analysis
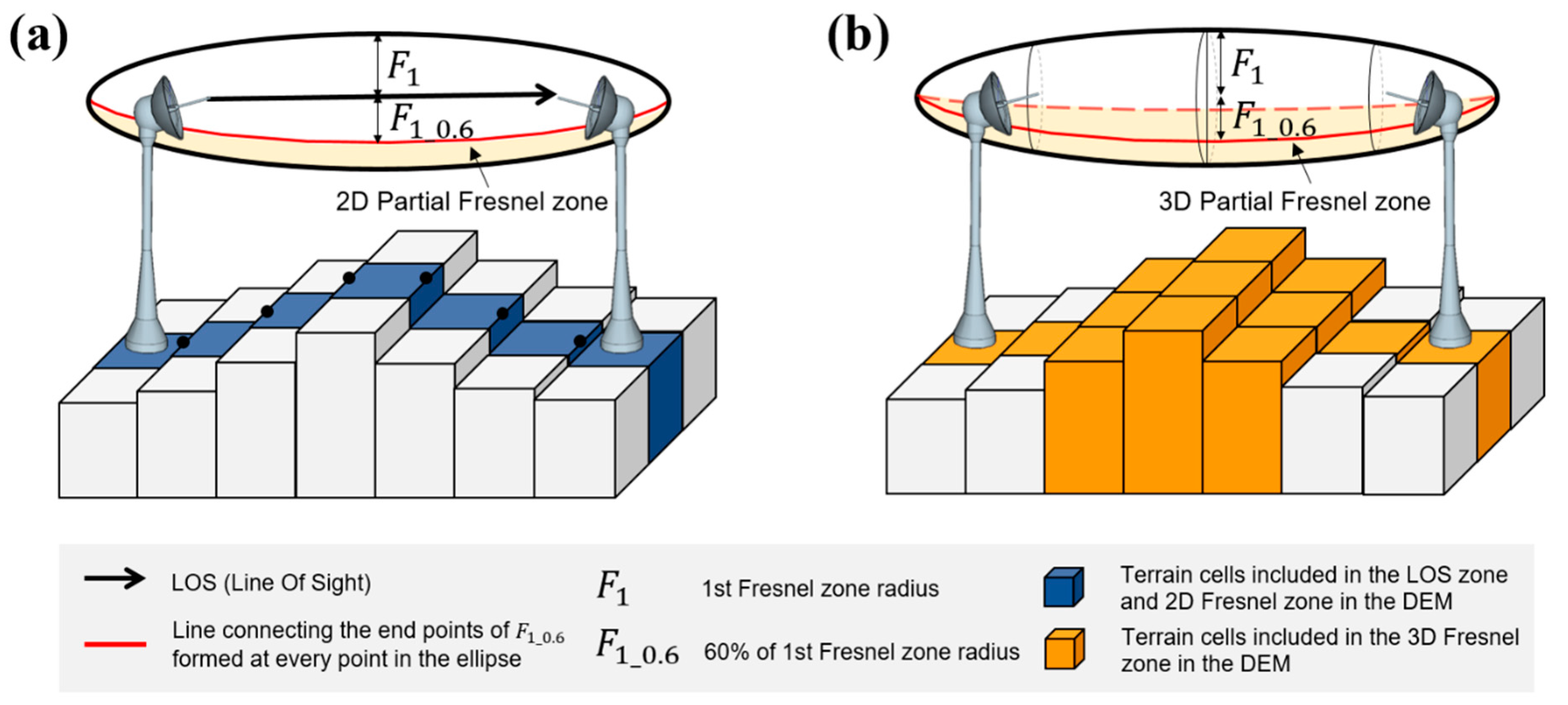
3.2. 2D Fresnel Zone Analysis
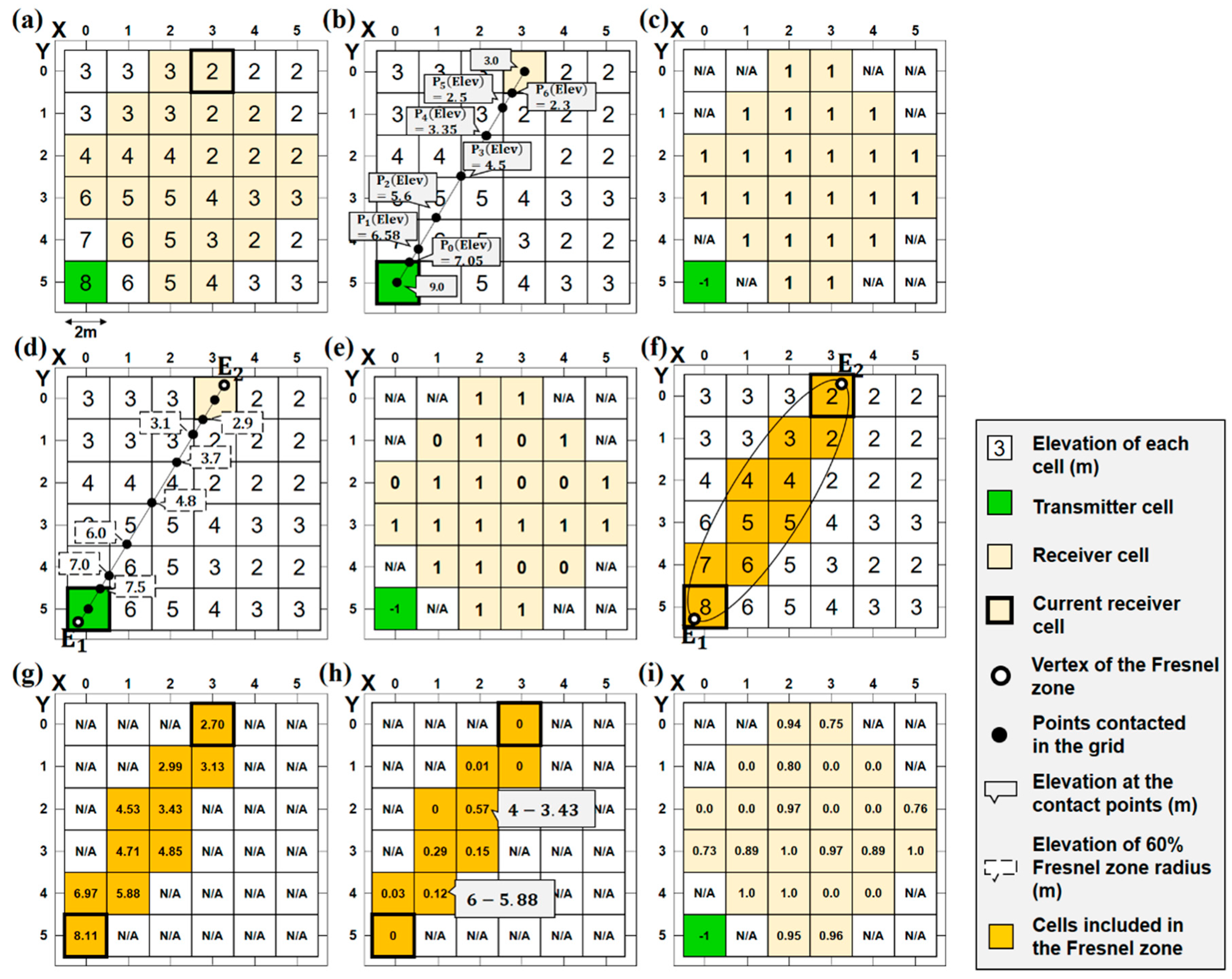
- The distance between and every contact point is calculated. In Equation (11), is the distance (m) between and the i-th contact point.
- The upper surface altitude of the 2D partial Fresnel zone at the i-th contact point is calculated by setting as the x coordinate and 0 as the y coordinate of the 3D Fresnel zone equation.
- The terrain altitude of every contact point is compared with the upper surface altitude of the 2D partial Fresnel zone to obtain the 2D Fresnel index of the current receiver cell. In Equation (12), is the 2D Fresnel zone index of the current receiver cell, is the upper surface altitude of the 2D partial Fresnel zone at the i-th contact point, and is the terrain altitude of the i-th contact point (m).
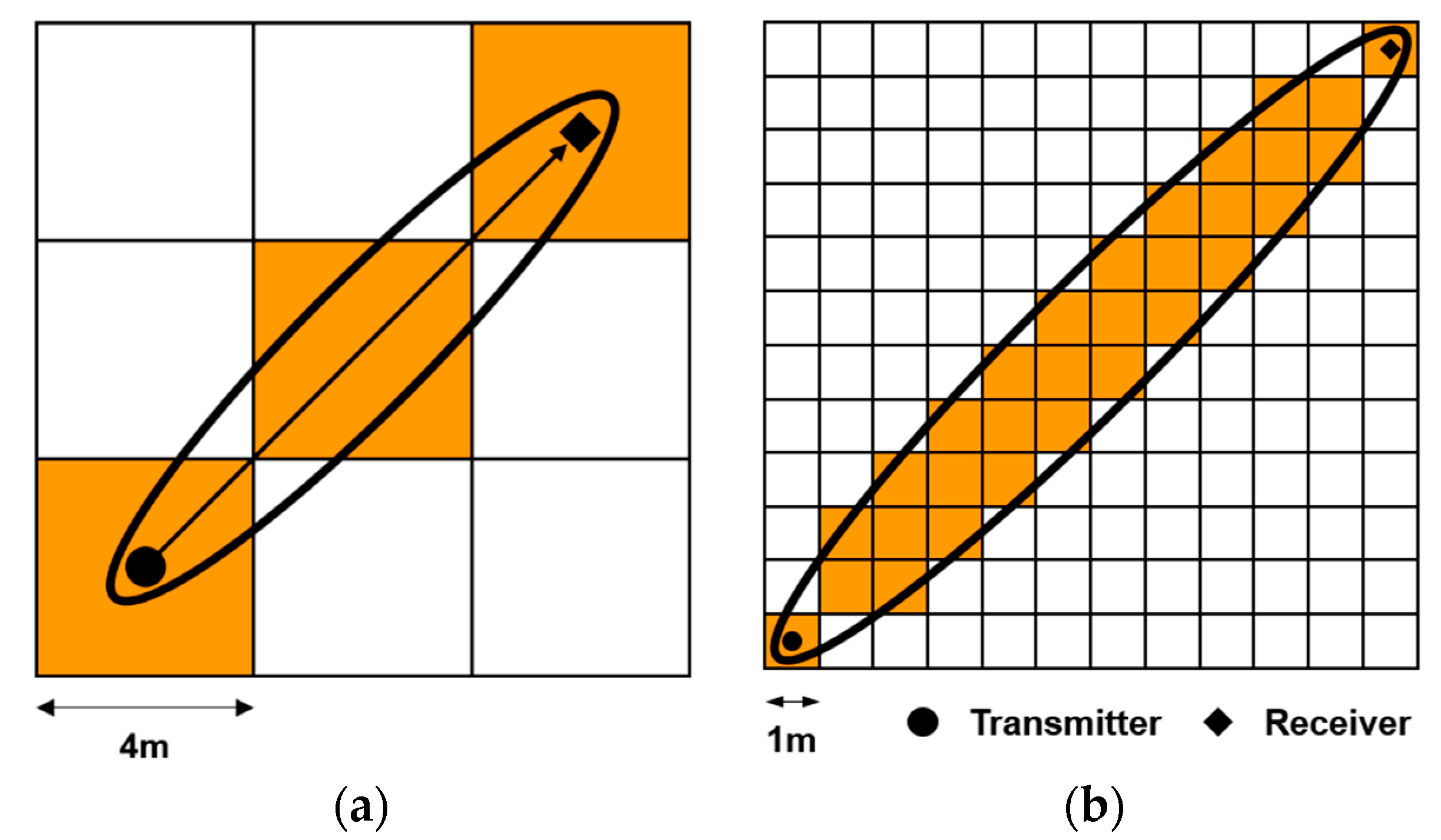
3.3. 3D Fresnel Zone Analysis
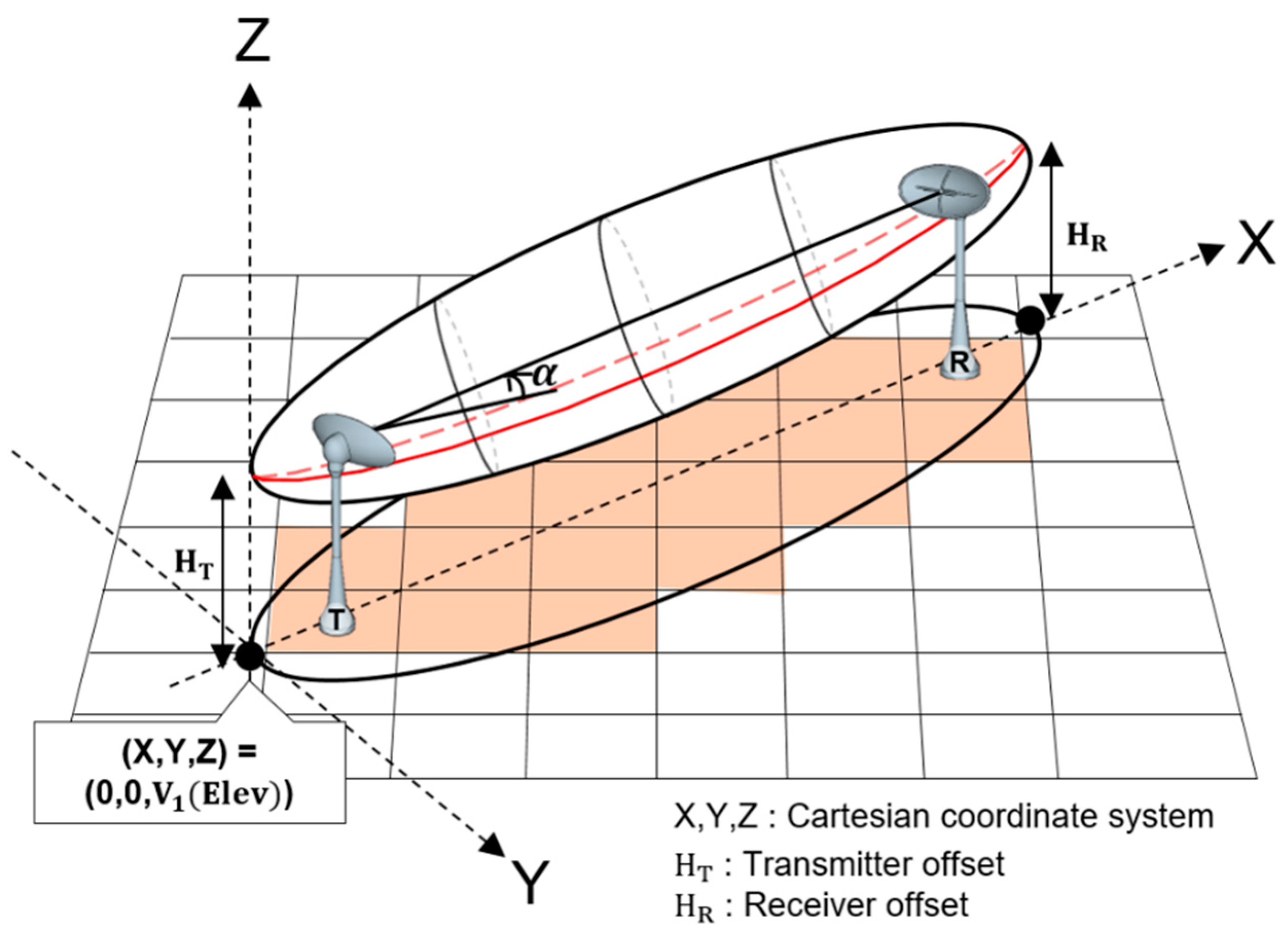
- To extract all cells included in the 3D Fresnel zone, the x and y coordinates of all raster cells in the xy coordinate system are converted into those of the Cartesian coordinate system, which has a straight line connecting and as the x axis. The converted x and y coordinates are inputted into Equation (14) to determine whether a cell is present in the 3D Fresnel zone (Figure 5).
- After extracting only those cells included in the 3D Fresnel zone, the x and y coordinates of the cells are inputted into the 3D partial Fresnel zone and the 3D Fresnel zone equations in order to extract the upper and lower surface altitudes of the 3D partial Fresnel zone at a given cell point (Figure 4g).
- The 3D Fresnel index is calculated by comparing the terrain altitude (m) of the i-th cell included in the 3D Fresnel zone and the upper and lower surface altitudes (m) of the 3D partial Fresnel zone (Figure 4h,i). The 3D Fresnel index is a real number between 0 and 1.
4. Application of LOS, 2D Fresnel Zone, and 3D Fresnel Zone Analysis
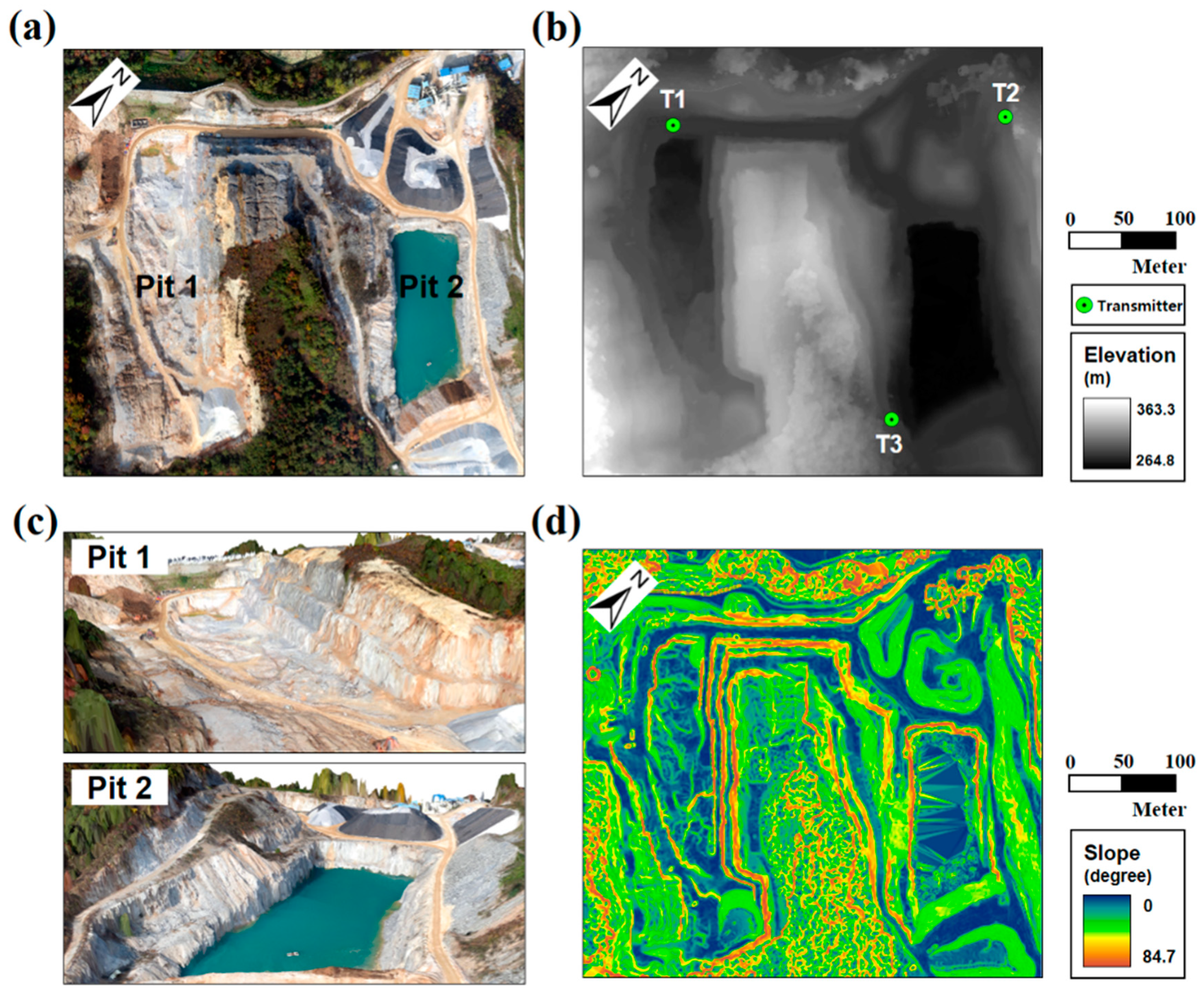
4.1. Study Area and Data
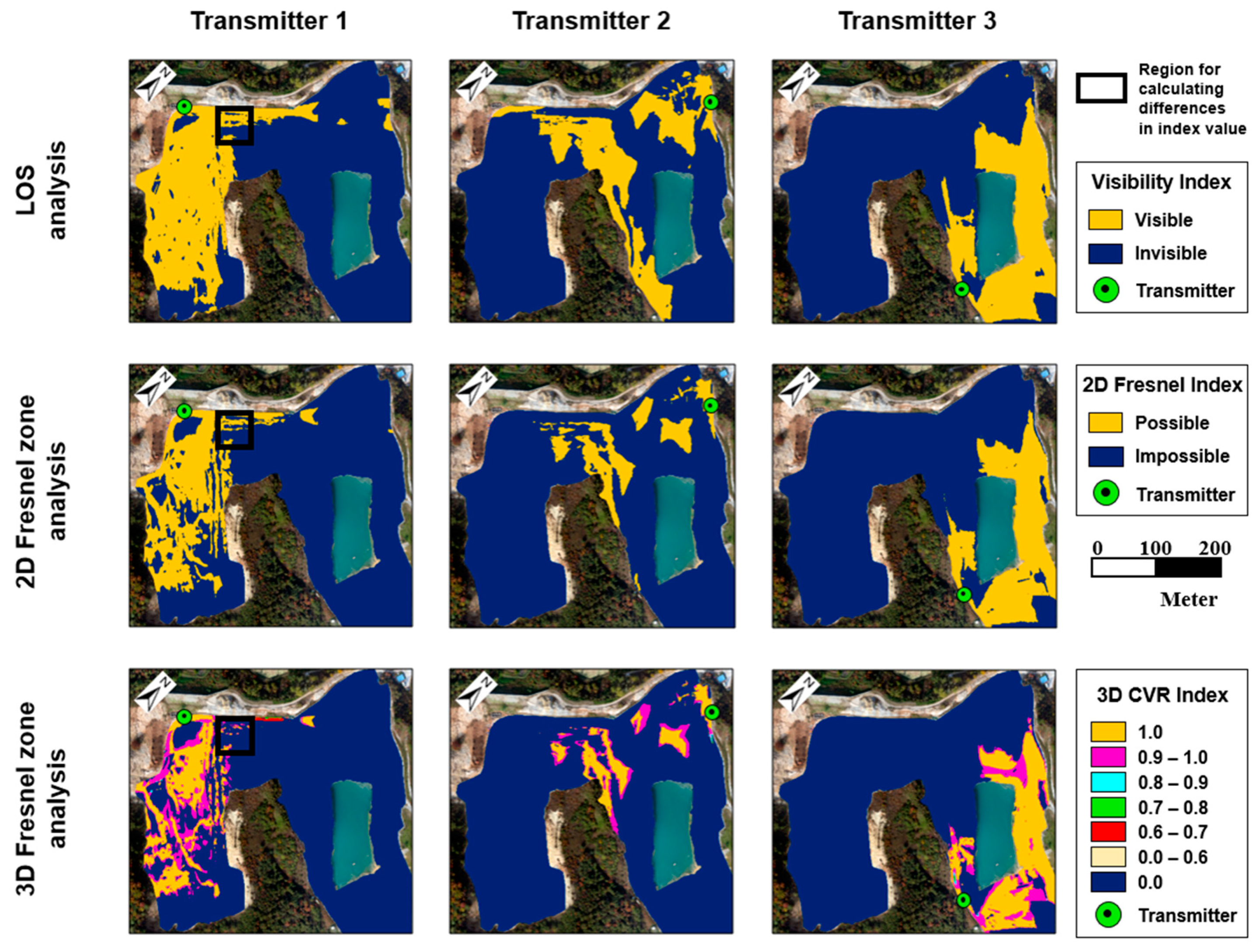
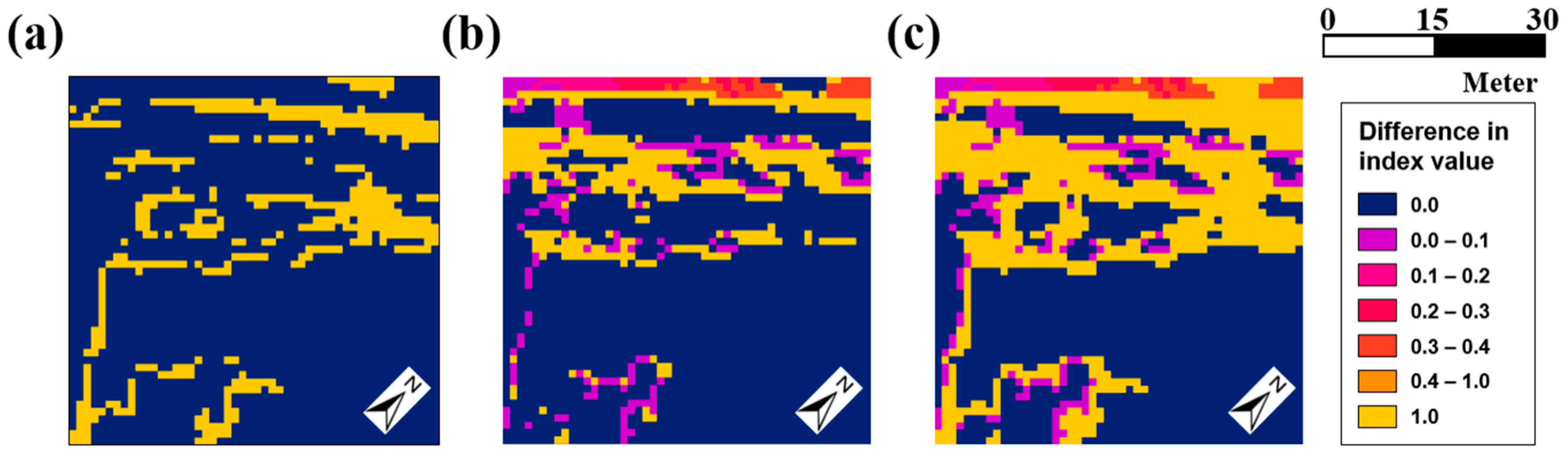
4.2. Communication Viewshed Analysis Using the LOS, 2D Fresnel Zone, and 3D Fresnel Zone Methods
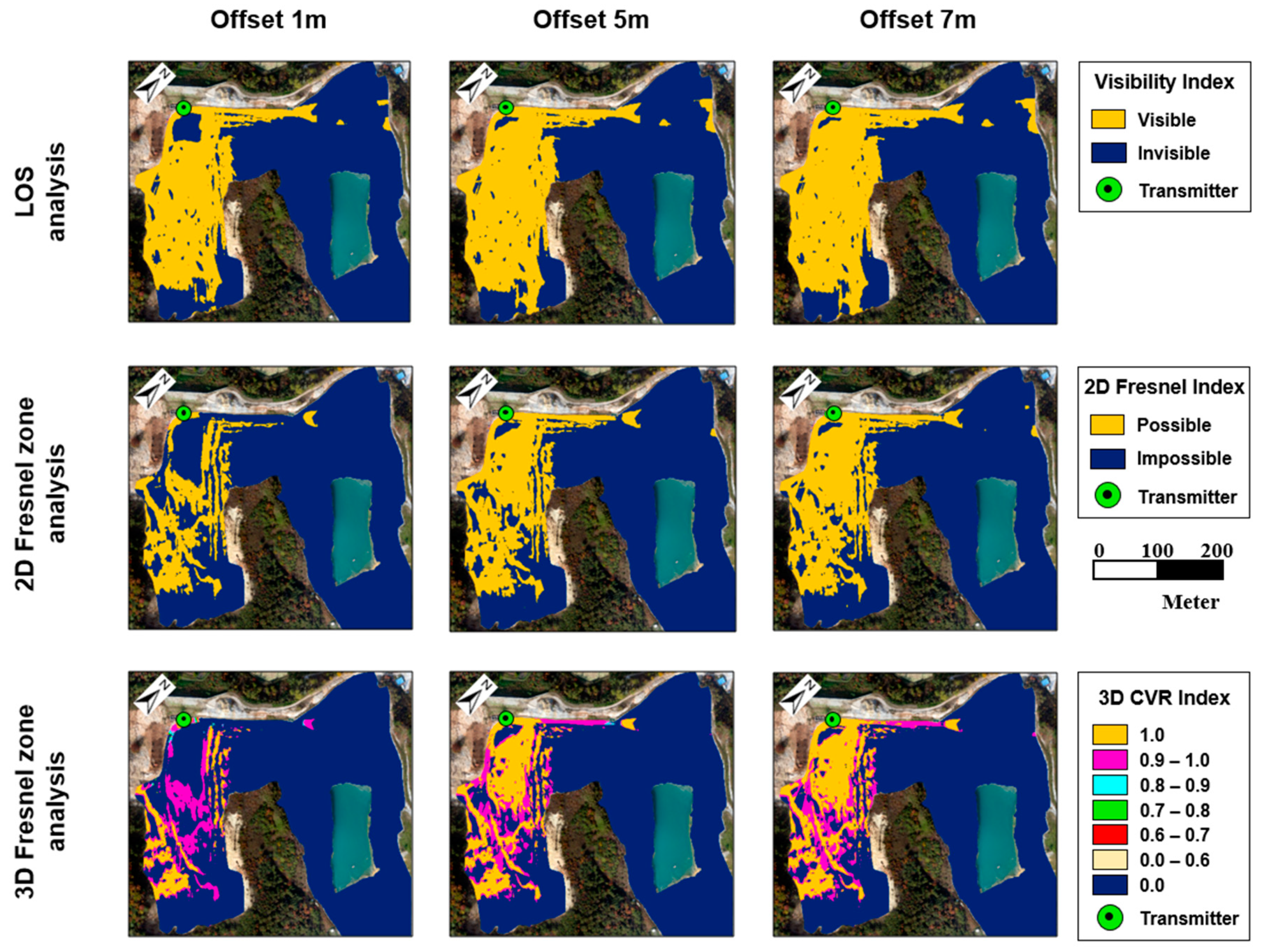
4.3. Communication Viewshed Analysis with Different Transmitter Offset Height Thresholds
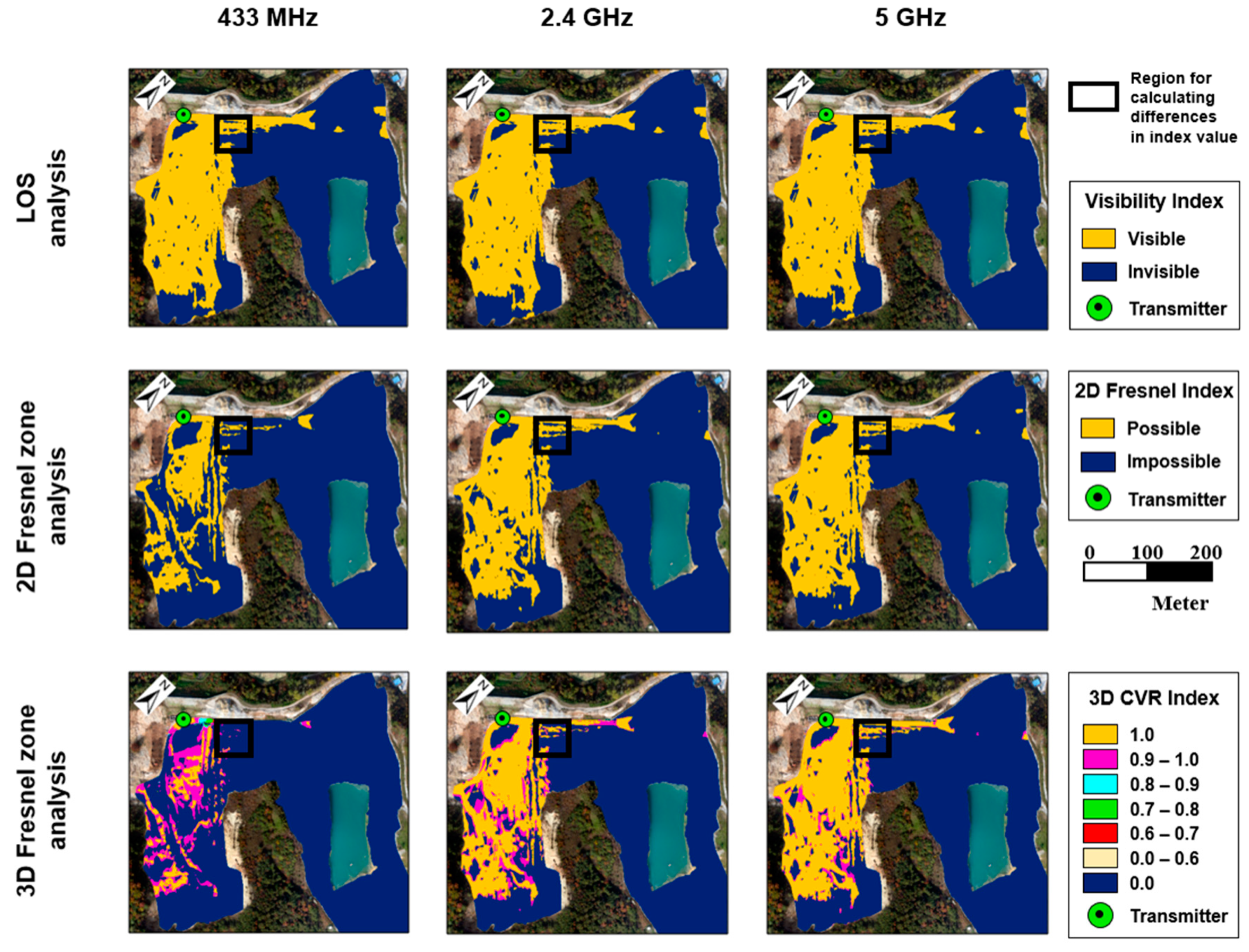
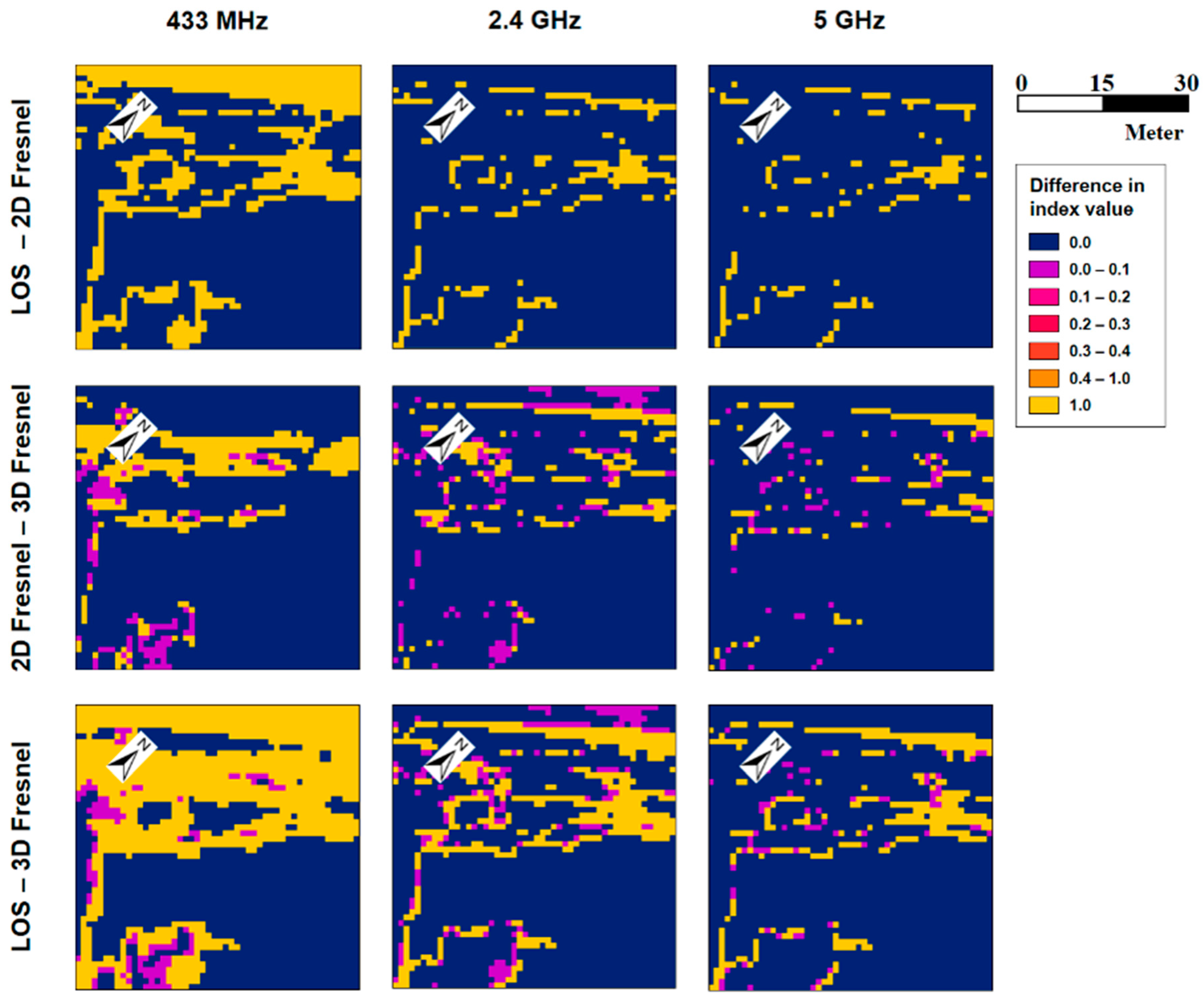
4.4. Communication Viewshed Analysis with Different Frequency Thresholds
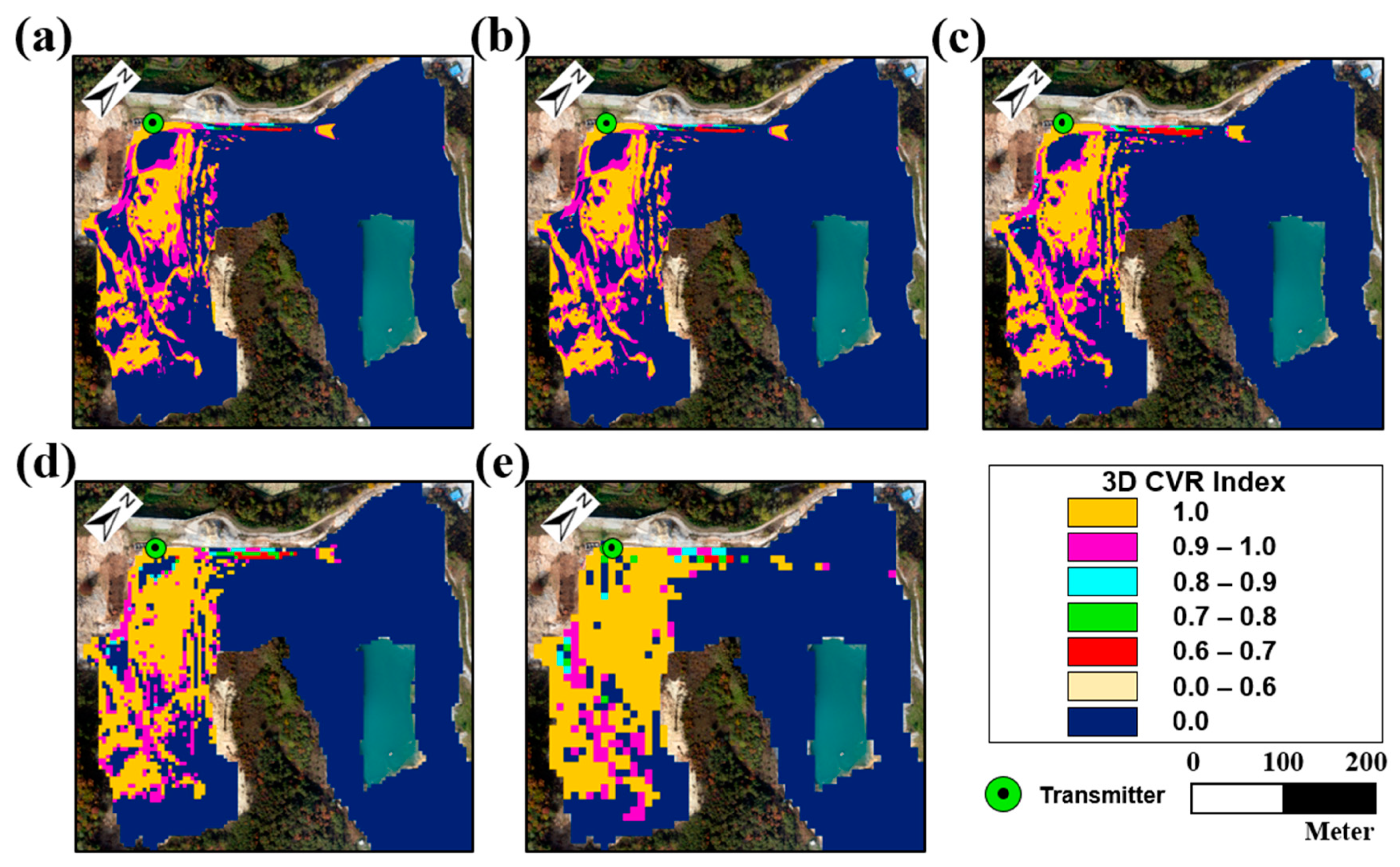
4.5. Communication Viewshed Analysis with Different DSM Resolutions
5. Discussion
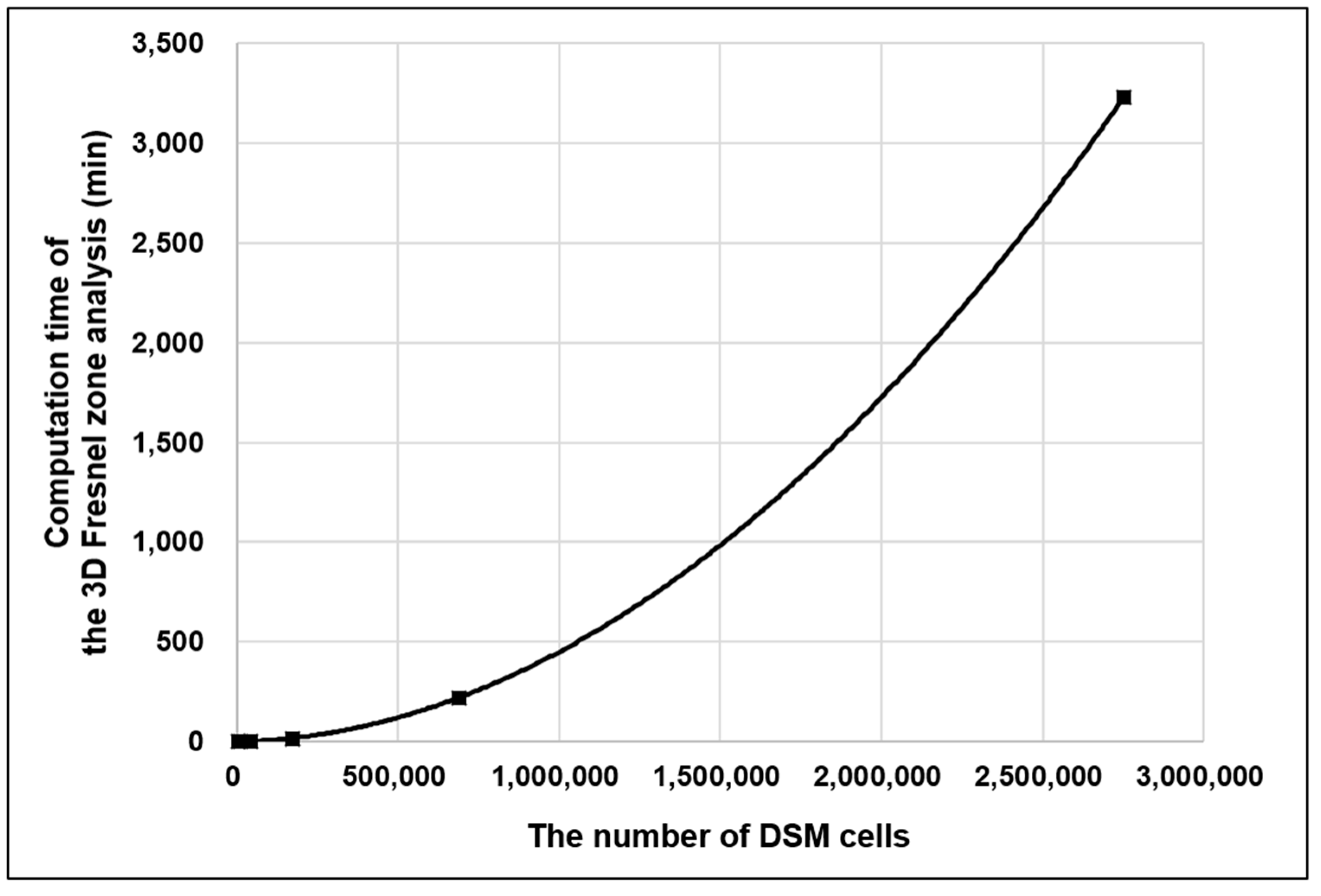
5.1. Comparison of the Computation Time for Each Method
5.2. Limitations of Communication Viewsheds and Future Works
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, J.; Stucky, D. On Appliying Viewshed Analysis for Determining Least-Cost Paths on Digital Elevation Models. Int. J. Geogr. Inf. Sci. 1998, 12, 891–905. [Google Scholar] [CrossRef]
- ArcGIS by ESRI. Available online: https://www.esri.com/en-us/arcgis/about-arcgis/overview (accessed on 22 June 2018).
- GRASS GIS by Open Source Geospatial Foundation (OSGeo). Available online: https://grass.osgeo.org/ (accessed on 22 June 2018).
- IDRISI by Clark Labs. Available online: https://clarklabs.org/terrset/idrisi-gis/ (accessed on 22 June 2018).
- Fisher, P.F. First Experiments in Viewshed Uncertainty: The Accuracy of the Viewshed Area. Photogramm. Eng. Remote. Sens. 1991, 57, 1321–1327. [Google Scholar]
- Sorensen, P.A.; Lanter, D.P. Two Algorithms for Determining Partial Visibility and Reducing Data Structure Induced Error in Viewshed Analysis. Photogramm. Eng. Remote. Sens. 1993, 59, 1149–1160. [Google Scholar]
- Lee, J. Analyses of Visibility Sites on Topographic Surfaces. Int. J. Geogr. Inf. Syst. 1991, 5, 413–429. [Google Scholar] [CrossRef]
- Floriani, L.D.; Magillo, P. Visibility Algorithms on Triangulated Digital Terrain Models. Int. J. Geogr. Inf. Syst. 1994, 8, 13–41. [Google Scholar] [CrossRef]
- Coll, N.; Fort, M.; Madern, N.; Sellarès, J.A. Multi-visibility Maps of Triangulated Terrains. Int. J. Geogr. Inf. Sci. 2007, 21, 1115–1134. [Google Scholar] [CrossRef]
- De Floriani, L.; Magillo, P. Algorithms for Visibility Computation on Terrains: A Survey. Environ. Plan. B Plan. Des. 2003, 30, 709–728. [Google Scholar] [CrossRef]
- Huss, R.E.; Pumar, M.A. Effect of Database Errors on Intervisibility Estimation. Photogramm. Eng. Remote. Sens. 1997, 63, 415–424. [Google Scholar]
- Franklin, R.; Ray, C.R. Higher isn’t necessarily better: Visibility algorithms and experiments. In Proceedings of the Advances in GIS research: 6th international symposium on spatial data handling University of Edinburgh, Edinburgh, UK, 5–9 September 2004; Waugh, T.C., Healey, R.G., Eds.; Taylor & Francis: London, UK, 1994; pp. 751–770. [Google Scholar]
- Fisher, P.F. Stretching the Viewshed. In Proceedings of the 6th International Symposium on Spatial Data Handling, University of Edinburgh, Edinburgh, UK, 5–10 July; Waugh, T.C., Healey, R.G., Eds.; Taylor & Francis: London, UK, 1994; pp. 725–738. [Google Scholar]
- Lee, J. Digital Analysis of Viewshed Inclusion and Topographic Features on Digital Elevation Models. Photogramm. Eng. Remote. Sens. 1994, 60, 451–456. [Google Scholar]
- Rana, S. Fast Approximation of Visibility Dominance Using Topographic Features as Targets and the Associated Uncertainty. Photogramm. Eng. Remote. Sens. 2003, 69, 881–888. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Robinson, G.J.; White, K. A Fast Solution to Local Viewshed Computation Using Grid-Based Digital Elevation Models. Photogramm. Eng. Remote. Sens. 1996, 62, 1157–1164. [Google Scholar]
- Van Kreveld, M. Variations on Sweep Algorithms: Efficient Computation of Extended Viewsheds and Class Intervals. In Proceedings of the 7th international symposium on spatial data handling: Advances in GIS research II (SDH’96), Delft, The Netherlands, 12–16 August 1996; Kraak, M.J., Molenaar, M., Eds.; TU Delft: Delft, The Netherlands, 1996; pp. 15–27. [Google Scholar]
- Wang, J.; Robinson, G.J.; White, K. Generating Viewsheds without Using Sightlines. Photogramm. Eng. Remote. Sens. 2000, 66, 87–90. [Google Scholar]
- Wu, H.; Pan, M.; Yao, L.; Luo, B. A partition-based Serial Algorithm for Generating Viewshed on Massive DEMs. Int. J. Geogr. Inf. Sci. 2007, 21, 955–964. [Google Scholar] [CrossRef]
- Ogburn, D.E. Assessing the Level of Visibility of Cultural Objects in Past Landscapes. J. Archaeol. Sci. 2006, 33, 405–413. [Google Scholar] [CrossRef]
- Kidner, D.; Rallings, P.; Ware, J. Parallel processing for terrain analysis in GIS: Visibility as a case study. Geoinformatica 1997, 1, 183–207. [Google Scholar] [CrossRef]
- Xia, Y.; Li, Y.; Shi, X. Parallel Viewshed Analysis on GPU using CUDA. In Proceedings of the 3th International Joint Conference on Computational Science and Optimization, Huangshan, China, 28–31 May 2010; IEEE: New York, NY, USA, 2010; pp. 373–374. [Google Scholar]
- Chao, F.; Chongjun, Y.; Zhuo, C.; Xiaojing, Y.; Hantao, G. Parallel algorithm for viewshed analysis on a modern GPU. Int. J. Digit. Earth 2011, 4, 471–486. [Google Scholar] [CrossRef]
- Gao, Y.; Yu, H.; Liu, Y.; Liu, Y.; Liu, M.; Zhao, Y. Optimization for viewshed analysis on GPU. In Proceedings of the 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; IEEE: New York, NY, USA, 2011; pp. 1–5. [Google Scholar]
- Zhao, Y.; Padmanabhan, A.; Wang, S. A parallel computing approach to viewshed analysis of large terrain data using graphics processing units. Int. J. Geogr. Inf. Sci. 2013, 27, 363–384. [Google Scholar] [CrossRef]
- Ferreira, C.R.; Andrade, M.V.A.; Magalhães, S.V.G.; Franklin, W.R.; Pena, G.C. A Parallel Algorithm for Viewshed Computation on Grid Terrains. J. Inf. Data Manag. 2014, 5, 171–180. [Google Scholar]
- Osterman, A.; Benedičič, L.; Ritoša, P. An IO-efficient Parallel Implementation of an R2 Viewshed Algorithm for Large Terrain Maps on CUDA GPU. Int. J. Geogr. Inf. Sci. 2014, 28, 2304–2327. [Google Scholar] [CrossRef]
- Nackaerts, K.; Govers, G.; Orshoven, J. Van Accuracy assessment of probabilistic visibilities. Int. J. Geogr. Inf. Sci. 1999, 13, 709–721. [Google Scholar] [CrossRef]
- Tabik, S.; Zapata, E.L.; Romero, L.F. Simultaneous computation of total viewshed on large high resolution grids. Int. J. Geogr. Inf. Sci. 2013, 27, 804–814. [Google Scholar] [CrossRef]
- Bao, S.; Xiao, N.; Lai, Z.; Zhang, H.; Kim, C. Optimizing Watchtower Locations for Forest Fire Monitoring Using Location Models. Fire Saf. J. 2015, 71, 100–109. [Google Scholar] [CrossRef]
- Chmielewski, S.; Lee, D.J.; Tompalski, P.; Chmielewski, J.T.; Wężyk, P. Measuring Visual Pollution by Outdoor Advertisements in an Urban Street Using Intervisibility Analysis and Public Surveys. Int. J. Geogr. Inf. Sci. 2016, 30, 801–818. [Google Scholar] [CrossRef]
- Germino, M.J.; Reiners, W.A.; Blasko, B.J.; McLeod, D.; Bastian, C.T. Estimating Visual Properties of Rocky Mountain Landscapes Using GIS. Landsc. Urban Plan. 2001, 53, 71–83. [Google Scholar] [CrossRef]
- Möller, B. Changing Wind-power Landscapes: Regional Assessment of Visual Impact on Land Use and Population in Northern Jutland, Denmark. Appl. Energy 2006, 83, 477–494. [Google Scholar] [CrossRef]
- Geneletti, D. Impact assessment of proposed ski areas: A GIS Approach Integrating Biological, Physical and Landscape Indicators. Environ. Impact Assess. Rev. 2008, 28, 116–130. [Google Scholar] [CrossRef]
- Mouflis, G.D.; Gitas, I.Z.; Iliadou, S.; Mitri, G.H. Assessment of the Visual Impact of Marble Quarry Expansion (1984–2000) on the Landscape of Thasos Island, NE Greece. Landsc. Urban Plan. 2008, 86, 92–102. [Google Scholar] [CrossRef]
- Danese, M.; Nolè, G.; Murgante, B. Geocomputation, Sustainability and Environmental Planning; Identifying Viewshed: New Approaches to Visual Impact Assessment; Springer: Berlin, Germany, 2011; pp. 73–89. ISBN 978-3-642-19732-1. [Google Scholar]
- Minelli, A.; Marchesini, I.; Taylor, F.E.; De Rosa, P.; Casagrande, L.; Cenci, M. An Open Source GIS Tool to Quantify the Visual Impact of Wind Turbines and Photovoltaic Panels. Environ. Impact Assess. Rev. 2014, 49, 70–78. [Google Scholar] [CrossRef]
- Wang, X. Visibility Analysis of Wind Turbines Applied to Assessment of Wind Farms’ Electromagnetic Impact. In Proceedings of the 2013 IEEE 3th International Conference on Information Science and Technology (ICIST), Yangzhou, China, 23–25 March 2013; IEEE: New York, NY, USA, 2013; pp. 1277–1280. [Google Scholar]
- Castro, M.; De Santos-Berbel, C. Spatial Analysis of Geometric Design Consistency and Road Sight Distance. Int. J. Geogr. Inf. Sci. 2015, 29, 2061–2074. [Google Scholar] [CrossRef]
- Fontani, F. Application of the Fisher’s “Horizon Viewshed” to a proposed power transmission line in Nozzano (Italy). Trans. GIS 2017, 21, 835–843. [Google Scholar] [CrossRef]
- Aben, J.; Pellikka, P.; Travis, J.M.J. A call for viewshed ecology: Advancing our understanding of the ecology of information through viewshed analysis. Methods Ecol. Evol. 2018, 9, 624–633. [Google Scholar] [CrossRef]
- Marsh, E.J.; Schreiber, K. Eyes of the empire: A viewshed-based exploration of Wari site-placement decisions in the Sondondo Valley, Peru. J. Archaeol. Sci. Rep. 2015, 4, 54–64. [Google Scholar] [CrossRef] [Green Version]
- Dodd, H.M. The Validity of Using a Geographic Information System’s Viewshed Function as a Predictor for the Reception of Line-of-Sight Radio Waves The Validity of Using a Geographic Information System’s Viewshed Function as a Predictor for the Reception of Line. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, August 2001. [Google Scholar]
- Bostian, C.; Carstensen, L.; Sweeney, D. Using Geographical Information Systems to Predict Coverage in Broadband Wireless Systems. In Proceedings of the 27th International Union of Radio Science, Maastricht, The Netherlands, 17–24 August 2002; pp. 2–5. [Google Scholar]
- Popelka, S.; Voženílek, V. Landscape visibility analyses and their visualization. ISPRS Arch. 2010, 38, 1–6. [Google Scholar]
- Miller, M.L. Analysis of Viewshed Accuracy with Variable Resolution LIDAR Digital Surface Models and Photogrammetrically. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, October 2011. [Google Scholar]
- Bertoni, H.L. Radio Propagation for Modern Wireless Systems; Goodwin, B., Ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999; pp. 1–276. ISBN 0-13-026373-7. [Google Scholar]
- Campbell Scientific, Inc. Line of Sight Obstruction. Available online: https://s.campbellsci.com/documents/us/technical-papers/line-of-sight-obstruction.pdf (accessed on 23 May 2018).
- GlobalMapper (Ver.19.1) by Blue Marble Geographics. Available online: http://www.bluemarblegeo.com/products/global-mapper.php (accessed on 22 June 2018).
- Terrain Analysis Package (TAP) by SoftWright. Available online: https://www.softwright.com/ (accessed on 22 June 2018).
- Cellular Expert Extension by ESRI. Available online: http://www.cellular-expert.com/ (accessed on 22 June 2018).
- Coleman, D.D.; Westcott, D.A. CWNA: Certified Wireless Network Administrator Official Study Guide: Exam PW0-105, 3rd ed.; Kellum, J., Ed.; Wiley: New York, NY, USA, 2012; pp. 1–768. ISBN 978-1-118-12779-7. [Google Scholar]
- Lee, S.; Choi, Y. Topographic Survey at Small-scale Open-pit Mines using a Popular Rotary-wing Unmanned Aerial Vehicle (Drone). Tunn. Undergr. Space Technol. 2015, 25, 462–469. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. On-site Demonstration of Topographic Surveying Techniques at Open-pit Mines using a Fixed-wing Unmanned Aerial Vehicle (Drone). Tunn. Undergr. Space Technol. 2015, 25, 527–533. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Choi, Y. Comparison of Topographic Surveying Results using a Fixed-wing and a Popular Rotary-wing Unmanned Aerial Vehicle (Drone). Tunn. Undergr. Space Technol. 2016, 26, 24–31. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Choi, Y. Reviews of unmanned aerial vehicle (Drone) technology trends and its applications in the mining industry. Geosyst. Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Chang, K. Introduction to Geographic Information Systems, 8th ed.; McGraw-Hill Education: New York, NY, USA, 2015; pp. 1–445. ISBN 978-9814636216. [Google Scholar]
- Sherali, H.D.; Pendyala, C.M.; Rappaport, T.S. Optimal location of transmitters for micro-cellular radio communication system design. IEEE J. Sel. Areas Commun. 1996, 14, 662–673. [Google Scholar] [CrossRef]
- Jaber, M.; Dawy, Z.; Akl, N.; Yaacoub, E. Tutorial on LTE/LTE-A Cellular Network Dimensioning Using Iterative Statistical Analysis. IEEE Commun. Surv. Tutor. 2016, 18, 1355–1383. [Google Scholar] [CrossRef]
- Puspitasari, N.F.; Al Fatta, H.; Wibowo, F.W. Layout Optimization of Wireless Access Point Placement Using Greedy and Simulated Annealing Algorithms. Network 2016, 2, 1–12. [Google Scholar] [CrossRef]
- Freeman, R.L. Fundamentals of Telecommunications, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2005; pp. 1–720. ISBN 9780471720935. [Google Scholar]
- Parsons, J.D. The Mobile Radio Propagation Channel, 2nd ed.; John Wiley & Sons: Chichester, UK, 2000; pp. 1–401. ISBN 978-0-471-98857-1. [Google Scholar]
- White, R.F. Engineering Considerations for Microwave Communications Systems; Lenkurt Electric Co., Inc.: San Carlos, CA, USA, 1970; pp. 1–119. [Google Scholar]
- Llobera, M. Modeling Visibility through Vegetation. Int. J. Geogr. Inf. Sci. 2007, 21, 799–810. [Google Scholar] [CrossRef]
- Murgoitio, J.J.; Shrestha, R.; Glenn, N.F.; Spaete, L.P. Improved Visibility Calculations with Tree Trunk Obstruction Modeling from Aerial LiDAR. Int. J. Geogr. Inf. Sci. 2013, 27, 1865–1883. [Google Scholar] [CrossRef]
- Yu, T.; Xiong, L.; Cao, M.; Wang, Z.; Zhang, Y.; Tang, G. A New Algorithm Based on Region Partitioning for Filtering Candidate Viewpoints of a Multiple Viewshed. Int. J. Geogr. Inf. Sci. 2016, 30, 2171–2187. [Google Scholar] [CrossRef]
- Shi, X.; Xue, B. Deriving a Minimum Set of Viewpoints for Maximum Coverage over any Given Digital Elevation Model Data. Int. J. Digit. Earth 2016, 9, 1153–1167. [Google Scholar] [CrossRef]
- Bartie, P.; Mackaness, W. Improving the Sampling Strategy for Point-to-point Line-of-sight modelling in Urban Environments. Int. J. Geogr. Inf. Sci. 2017, 31, 805–824. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. Transmitters | LOS Analysis | 2D Fresnel Zone Analysis | 3D Fresnel Zone Analysis | |||
|---|---|---|---|---|---|---|
| Sum of Visibility Index | Coverage Ratio (%) | Sum of 2D Fresnel Index | Coverage Ratio (%) | Sum of 3D Fresnel Index | Coverage Ratio (%) | |
| T1 | 32,347 | 33.96 | 21,887 | 22.98 | 18,091.61 | 19.19 |
| T2 | 21,281 | 22.34 | 9727 | 10.21 | 8474.26 | 8.93 |
| T3 | 24,916 | 26.16 | 21,445 | 22.51 | 20,139.68 | 21.20 |
| Total | 78,544 | 74.72 | 53,059 | 54.83 | 46,706.33 | 48.99 |
| Offset Height (m) | Viewshed Analysis | 2D Fresnel Zone Analysis | 3D Fresnel Zone Analysis | |||
|---|---|---|---|---|---|---|
| Sum of Visibility Index | Coverage Ratio (%) | Sum of 2D Fresnel Index | Coverage Ratio (%) | Sum of 3D Fresnel Index | Coverage Ratio (%) | |
| 1 | 30,252 | 31.76 | 15,779 | 16.57 | 12,304.77 | 13.02 |
| 3 | 32,347 | 33.96 | 21,887 | 22.98 | 18,091.61 | 19.19 |
| 5 | 33,486 | 35.15 | 24,355 | 25.57 | 20,691.59 | 21.80 |
| 7 | 34,330 | 36.04 | 26,157 | 27.46 | 22,703.95 | 23.88 |
| DSM Resolution (m) | DSM Info. | Computation Time (min) | ||||
|---|---|---|---|---|---|---|
| Columns | Rows | Number of Cells | LOS Analysis | 2D Fresnel Zone Analysis | 3D Fresnel Zone Analysis | |
| 8 | 54 | 50 | 2700 | 0.00 | 0.00 | 0.02 |
| 4 | 108 | 100 | 10,800 | 0.00 | 0.00 | 0.08 |
| 2 | 215 | 200 | 43,000 | 0.03 | 0.08 | 1.03 |
| 1 | 430 | 400 | 172,000 | 0.45 | 1.25 | 15.73 |
| 0.5 | 860 | 800 | 688,000 | 2.32 | 6.25 | 221.75 |
| 0.25 | 1720 | 1600 | 2,752,000 | 18.33 | 49.22 | 3230.12 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, J.; Choi, Y. Comparison of Communication Viewsheds Derived from High-Resolution Digital Surface Models Using Line-of-Sight, 2D Fresnel Zone, and 3D Fresnel Zone Analysis. ISPRS Int. J. Geo-Inf. 2018, 7, 322. https://doi.org/10.3390/ijgi7080322
Baek J, Choi Y. Comparison of Communication Viewsheds Derived from High-Resolution Digital Surface Models Using Line-of-Sight, 2D Fresnel Zone, and 3D Fresnel Zone Analysis. ISPRS International Journal of Geo-Information. 2018; 7(8):322. https://doi.org/10.3390/ijgi7080322
Chicago/Turabian StyleBaek, Jieun, and Yosoon Choi. 2018. "Comparison of Communication Viewsheds Derived from High-Resolution Digital Surface Models Using Line-of-Sight, 2D Fresnel Zone, and 3D Fresnel Zone Analysis" ISPRS International Journal of Geo-Information 7, no. 8: 322. https://doi.org/10.3390/ijgi7080322
APA StyleBaek, J., & Choi, Y. (2018). Comparison of Communication Viewsheds Derived from High-Resolution Digital Surface Models Using Line-of-Sight, 2D Fresnel Zone, and 3D Fresnel Zone Analysis. ISPRS International Journal of Geo-Information, 7(8), 322. https://doi.org/10.3390/ijgi7080322