Ensemble Neural Networks for Modeling DEM Error


 , ,
, ,
Abstract
:1. Introduction
2. Study Area and Datasets
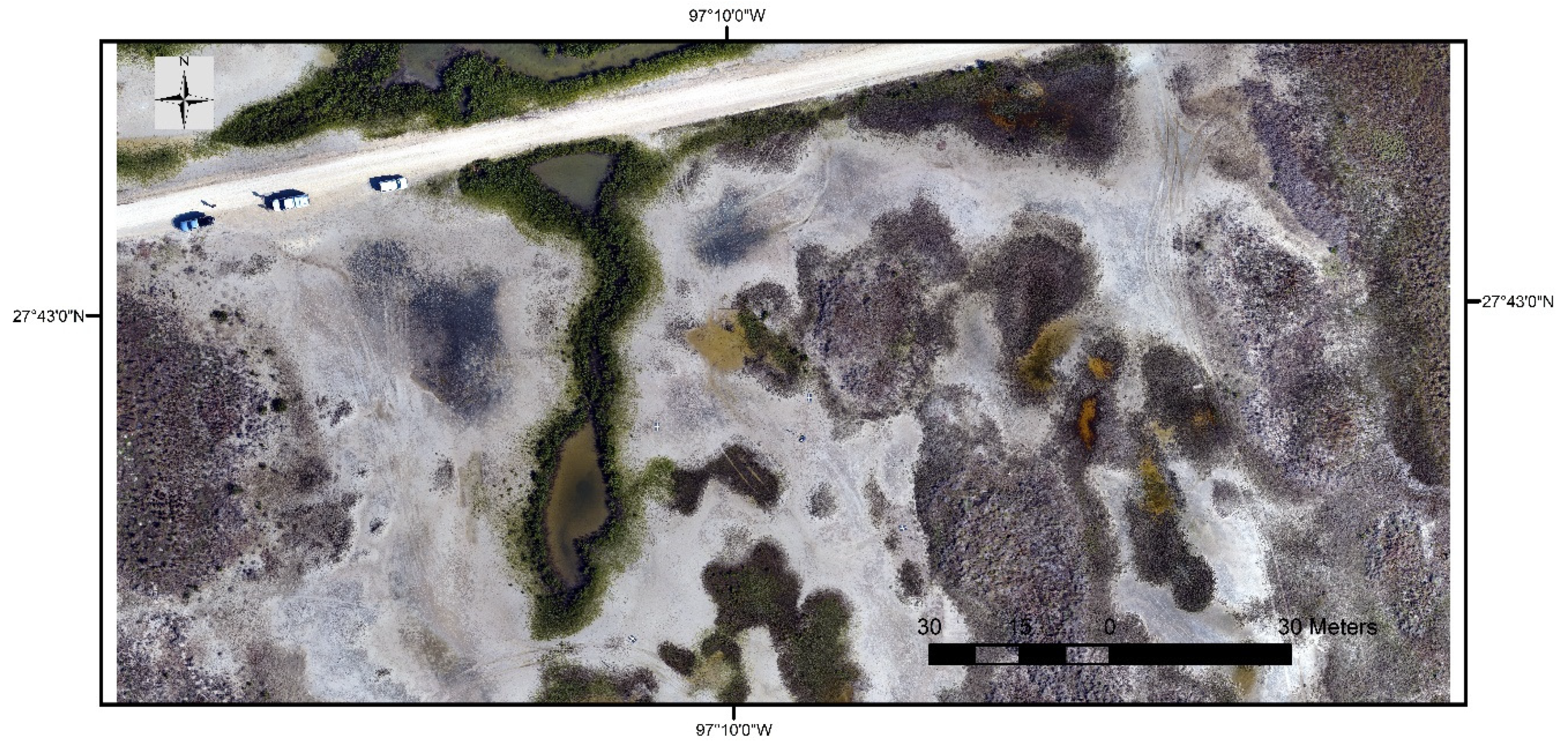
2.1. Study Site
2.2. Datasets
2.2.1. TLS Survey
2.2.2. RTK Survey
3. Method
3.1. Overview
- Generating a DEM from the 3D point cloud.
- Creating model inputs/predictors for every grid cell from the point cloud using data extracted from a circular neighborhood.
- Designing and training an ENN predicting DEM corrections for each cell, including the estimated uncertainty/tolerance intervals.
- Applying the trained ENN and implementing the DEM correction to the entire dataset.
- Independent validation of the corrected DEM and its estimated tolerance interval.
3.2. DEM Construction
3.3. Model Input/Predictors Selections
- Point density ( is selected as the first input because it strongly and directly impacts the quality and the accuracy of the DEM [41]. The higher sampling density would capture the terrain in more detail and reduce the DEM errors [37]. Point density is computed based on the number of points that fall within the circular search neighborhood.
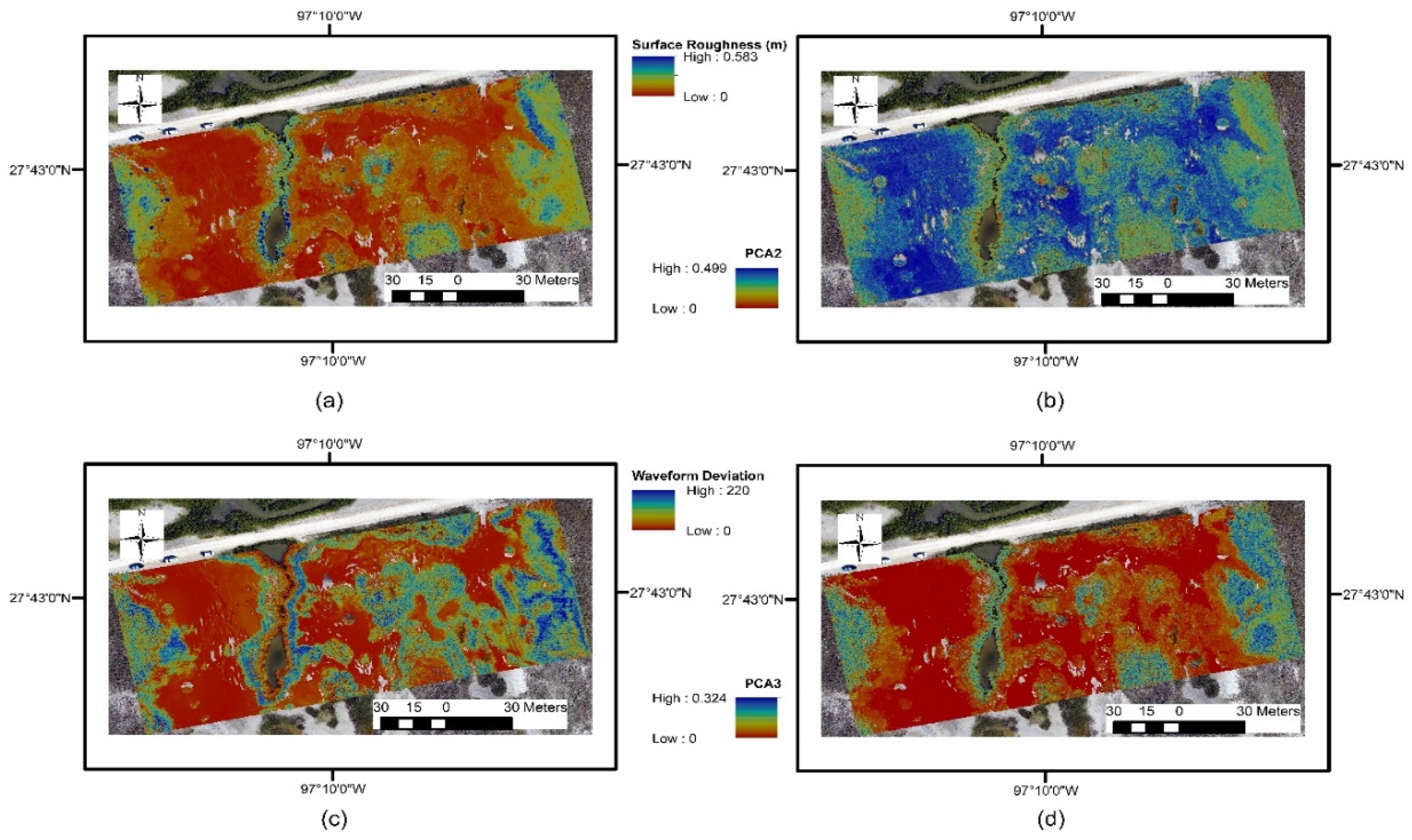
- Surface roughness ( is calculated as the standard deviation of point heights that fall within the circular neighborhood. It is selected as the second input because it reflects the complexity of the terrain. As shown in Figure 4, the surface roughness of the study area varies from 0.594 m to ~0 m. Mangrove and upland areas have a very high surface roughness (blue) while tidal flat areas have a surface roughness that approaches to 0 m (red). When the standard deviation approaches zero, it indicates a very homogeneous surface. The larger the standard deviation is, the more heterogeneous and complex the terrain appears, and likely the larger the corrections needed for the DEM.
- Information within the point cloud can be processed to indicate if the local geometry is more like a line (1D) ( ≈ 1 and ≈ 0), a plane surface (2D) (≈ 0), or whether points are distributed within the whole volume around the considered location (3D) (≈ ≈ . Maps of and values are presented in Figure 4. In Figure 4, one can see that the values of the tidal flat areas (in blue) are about 0.5. The same tidal flat areas have values close to zero (red). The values of vegetated areas are close to zero (yellow) while the values are about 0.3 (blue). These values indicate that the geometry of these tidal flat areas is characterized as 2D-like surfaces, while the vegetated areas are characteristic of a 3D-like geometry. Refer to [40] to see how the PCA eigenvalues (, are computed from a set of points within a circular neighborhood.
- Normalized height () is calculated as the difference between a DEM grid cell’s height and the minimum point height from the set of points that fall within the circular search neighborhood around the center location of the respective grid cell . This feature indicates the differences between the DEM heights to the raw point cloud minimum heights.
- RIEGL’s V-Line instrument provides an amplitude reading for every detected echo signal which reflects the strength of the received optical echo signal. Amplitude depends on the range of the reflection point from the scanner and percent reflectivity of the surface at the scanner wavelength among other factors [42]. Furthermore, lower signal to noise (reduced amplitude) can potentially result in more uncertainty in the measurement precision of the detected echo return. Median and standard deviation of amplitude were extracted by computing the median value of the amplitude measures for each point that fell within the circular search neighborhood and its standard deviation. Median amplitude, , can help delineate different types of terrains, such as a dry sand area, which typically provides a larger amplitude compared to a vegetated area. For standard deviation of amplitude, , the more varying the land cover locally, the more variation in received amplitude is expected. The combination of both median amplitude and standard deviation of amplitude seek to better represent the influence of land cover and received signal strength on the resultant DEM at different locations within the study area.
- Waveform deviation is an indicator of how deviated the laser pulse reflection is when coming back to the scanner relative to the outgoing laser pulse [42]. The smaller the waveform deviation value, the less noise it contains. Low values indicate that the laser pulse shape does not deviate significantly from the expected sensor response. High values indicate that the echo signals contained a significantly different pulse shape. Median and standard deviation of waveform deviation were extracted by computing the median value and standard deviation of the waveform deviation measures for each point that fell within the circular search neighborhood. For example, as shown in Figure 4, the high median of waveform deviation values ( (green-blue) comes from merging echo pulses from several or varying targets, such as different types of vegetation. Close to zero is observed for values that stem from single return echoes from exposed ground, such as tidal flats (red).
- Point spacing, amplitude, and measurement precision of the TLS are a function of range, decreasing radially away from the scanner. Even though the point cloud comes from five merged scans, the information of the median range () and standard deviation of the range () from the circular point cloud neighborhood are still capable of providing useful information about the characteristics of the point cloud. These characteristics may directly affect the accuracy of the DEM in some fashion, and they were included to capture such effect.
3.4. Model Output/Target Selection
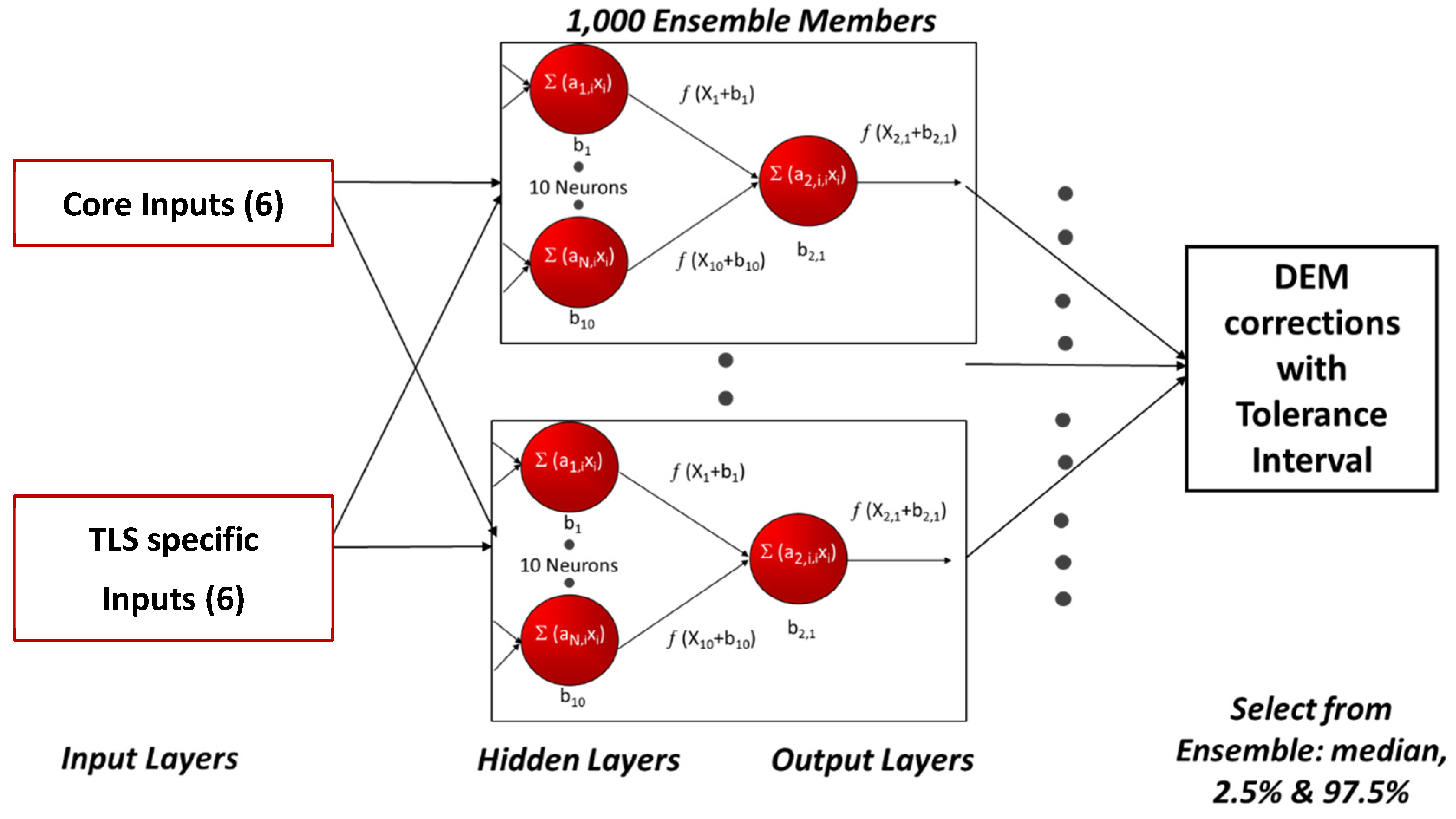
3.5. ENN Construction
- Step 1: A set of 100 RTK points were selected randomly and set aside. These 100 points were not used in the calibration of the models. These points were used after model calibration as independent validation to perform an assessment of the overall accuracy of the method.
- Step 2: The remaining RTK points (526) were assigned randomly to train (60%), validate (15%), and test (25%) each ensemble member.
- Step 3: Step 2 was repeated 1000 times after bootstrapping alternate training–validation–testing splits to calibrate each ensemble member and when combining the ensemble members creating an ENN model.
- Step 4: Medians, standard deviations, and 95% ranges of the corrections were computed based on the 1000 ensemble members with these statistics computed on the testing data of each ensemble member. Medians of the ensemble predictions were used as the DEM corrections. The 95% tolerance interval range of the corrections applied to each grid cell is estimated as the range of 950 out of the 1000 ENN members (475 upper and 475 lower of the median). To evaluate the accuracy of the ENN DEM corrections, the difference of elevation between the corrected values and the RTK measurements were calculated (. Positive differences indicate that the DEM corrections are overestimated. Zero differences indicate that the corrections are correctly estimated. Negative differences indicate that the corrections are underestimated.
- Step 5: For this research, steps 1 through 4 were then repeated while selecting different neural network architecture such as the number of hidden neurons and also varying the number of ensemble members while aiming to improve DEM correction accuracy.
- Step 6: Once all model parameters were selected and the full ensemble models using these parameters calibrated, the ensemble model was applied to the 100 RTK assessment points set aside at the start of the process to quantify independently the performance.
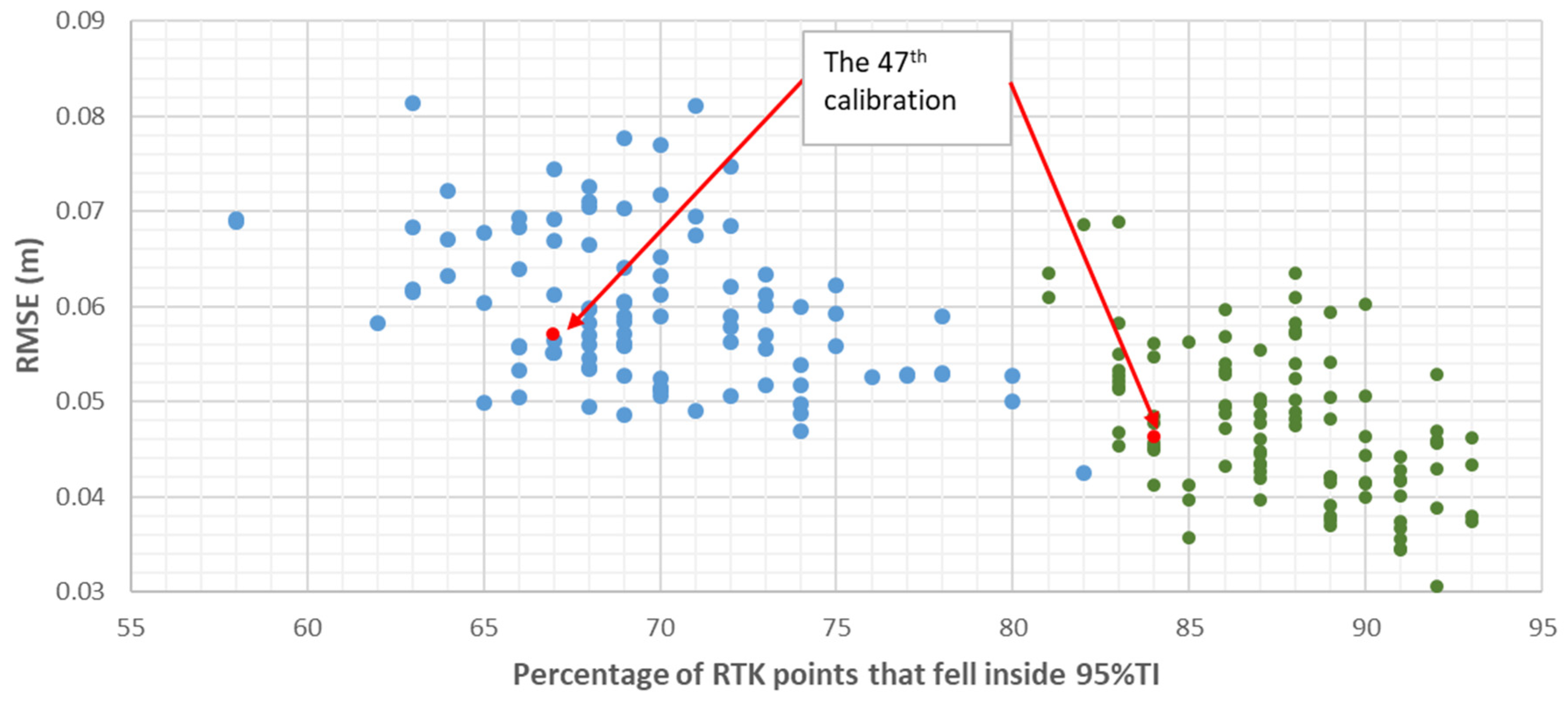
- Step 7: Steps 1 through 6 were then repeated 100 times while randomly selecting different sets of 100 RTK independent points to obtain a performance distribution.
- Step 8: A representative case with typical performance metrics (RMSE and tolerance interval) was finally selected and applied to the full DEM for a more in-depth analysis.
4. Results and Discussions
4.1. ENN Evaluation
4.2. DEM Accuracy and Tolerance Interval
4.2.1. DEM Accuracy
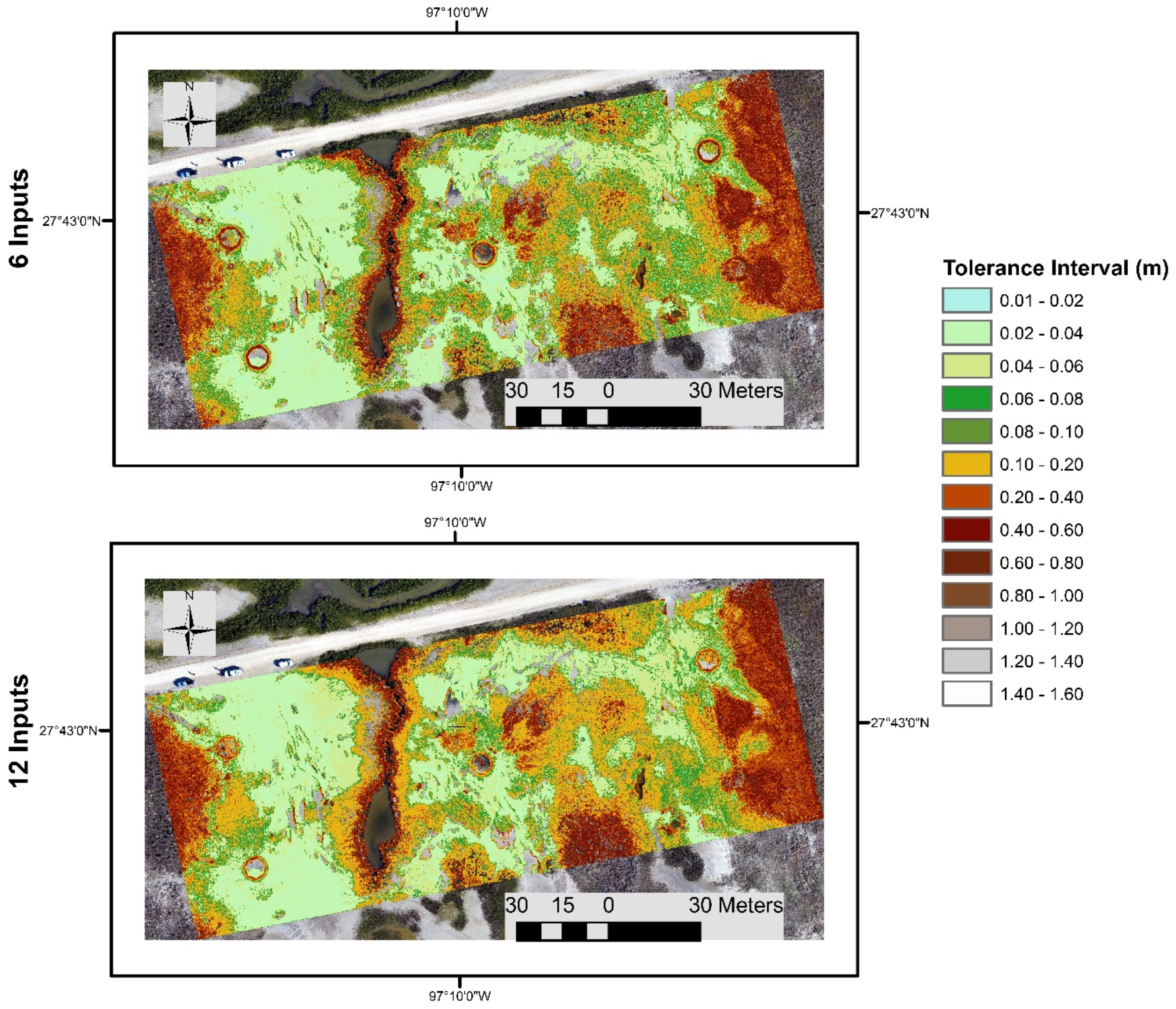
4.2.2. Tolerance Interval
4.3. Independent validation
4.3.1. DEM corrections
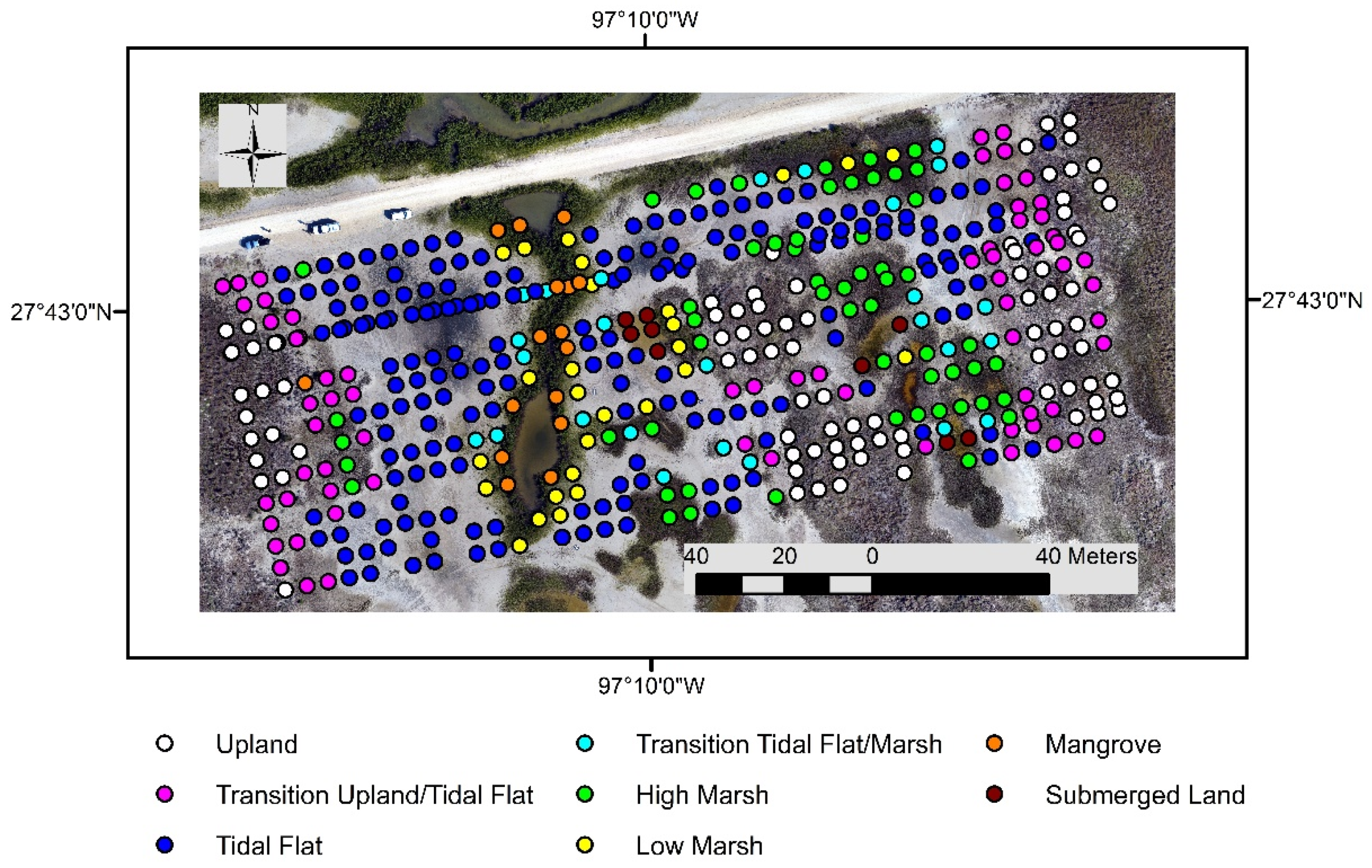
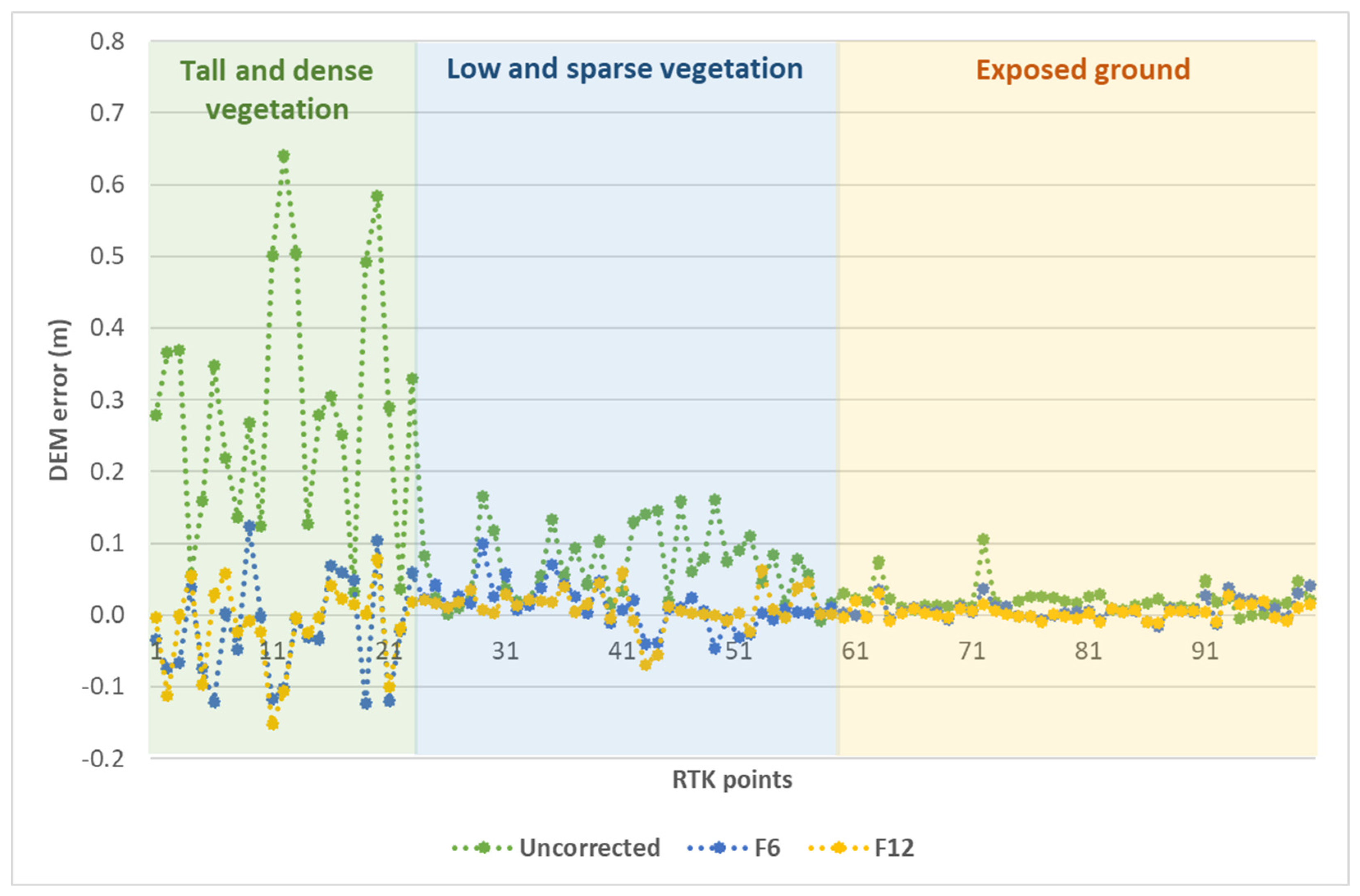
- The areas with high and dense vegetation cover including uplands and mangroves.
- The areas with low and sparse vegetation cover including transitions from uplands to tidal flats, and transitions from tidal flats to marshes, high marshes, low marshes.
- The areas with exposed ground including tidal flats and very shallow submerged lands exposed at the time of the scan.
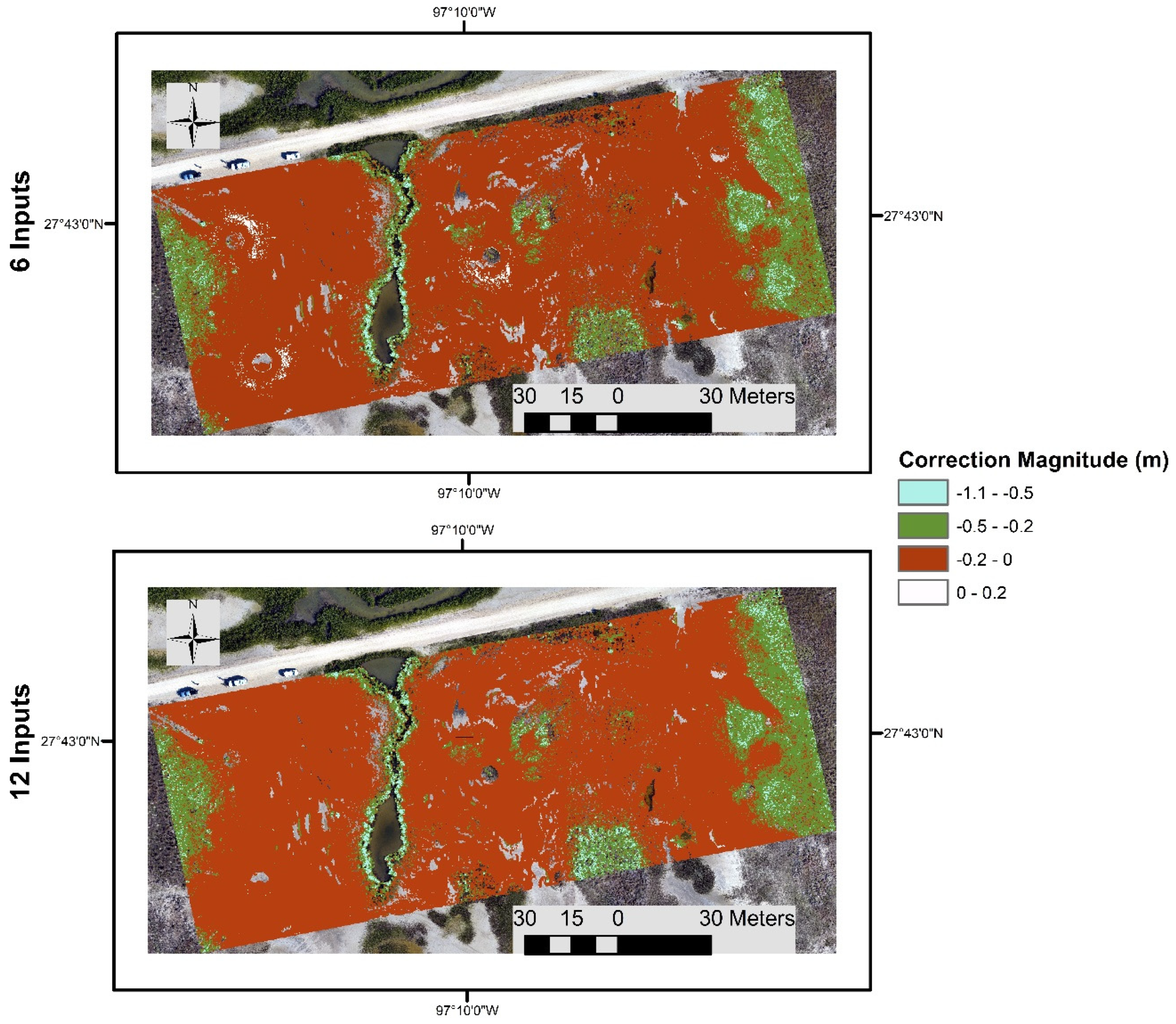
- For the areas with high and dense vegetation cover, the uncorrected DEM elevations have the largest overestimation errors (Figure 10). The overestimation is in a range of 0.01–0.64 m and with a median of 0.30 m. After applying the six-input ENN corrections, the corrected DEM elevation error improved to a range of −0.13–0.16 m with a median of 0.03 m. The 12-input ENN achieves better accuracy. The corrected DEM elevation error was in a range of −0.15–0.07 m with a median of 0.01 m. Both ENN models reduce the DEM errors significantly and result in a more accurate DEM elevation, which can be important for further analyses such as erosion and accretion estimates. A limitation of the ENN corrections may be a minute overcompensation in the magnitude of the correction for these areas. The DEM bias is +0.3 m prior to the corrections and –0.02 m for six-input and –0.01 m for 12-input after the corrections. Further analyses with more observations should be carried out for these specific areas to assess the impact of training data on the DEM correction.
- For the areas with lower and sparse vegetation cover, the uncorrected DEM also overestimated the RTK measurements (Figure 10). The overestimation error is in a smaller range of 0.02–0.16 m and with a median of 0.08 m. Based on the DEM error comparison, ENN performances were similar for six inputs and 12 inputs. Corrected DEM errors for both input sets were in the range of −0.04–0.04 m with a median of 0.004 m. The results show that the ENN method leads to a more accurate DEM even though the corrections are smaller at these areas.
- For the areas with exposed ground, the uncorrected DEM had mostly very small errors (Figure 10). The raw DEM errors were in a range of 0.040–0.005 m with a median of 0.020 m. It shows that TLS is capable of modeling the exposed terrain with accuracy near the uncertainty of the RTK ground truth data. This makes sense given that the same RTK approach was also used to georeference the TLS point cloud data. The ENN corrections were correlated to the DEM errors. The ENN estimated only very small corrections. For six inputs, DEM errors were in a range of 0.040–0.015 m with a median of 0.006 m. For 12 inputs, DEM errors were in a range of 0.030–0.012 m with a median of 0.005 m. The ENN method provides a small improvement in overall accuracy, <0.02 m, which falls within the range of the expected RTK uncertainty, +/−0.015 to 0.030 m. In this case, the respective accuracies of the TLS measurement and RTK measurement should be considered in the decision to apply the ENN corrections.
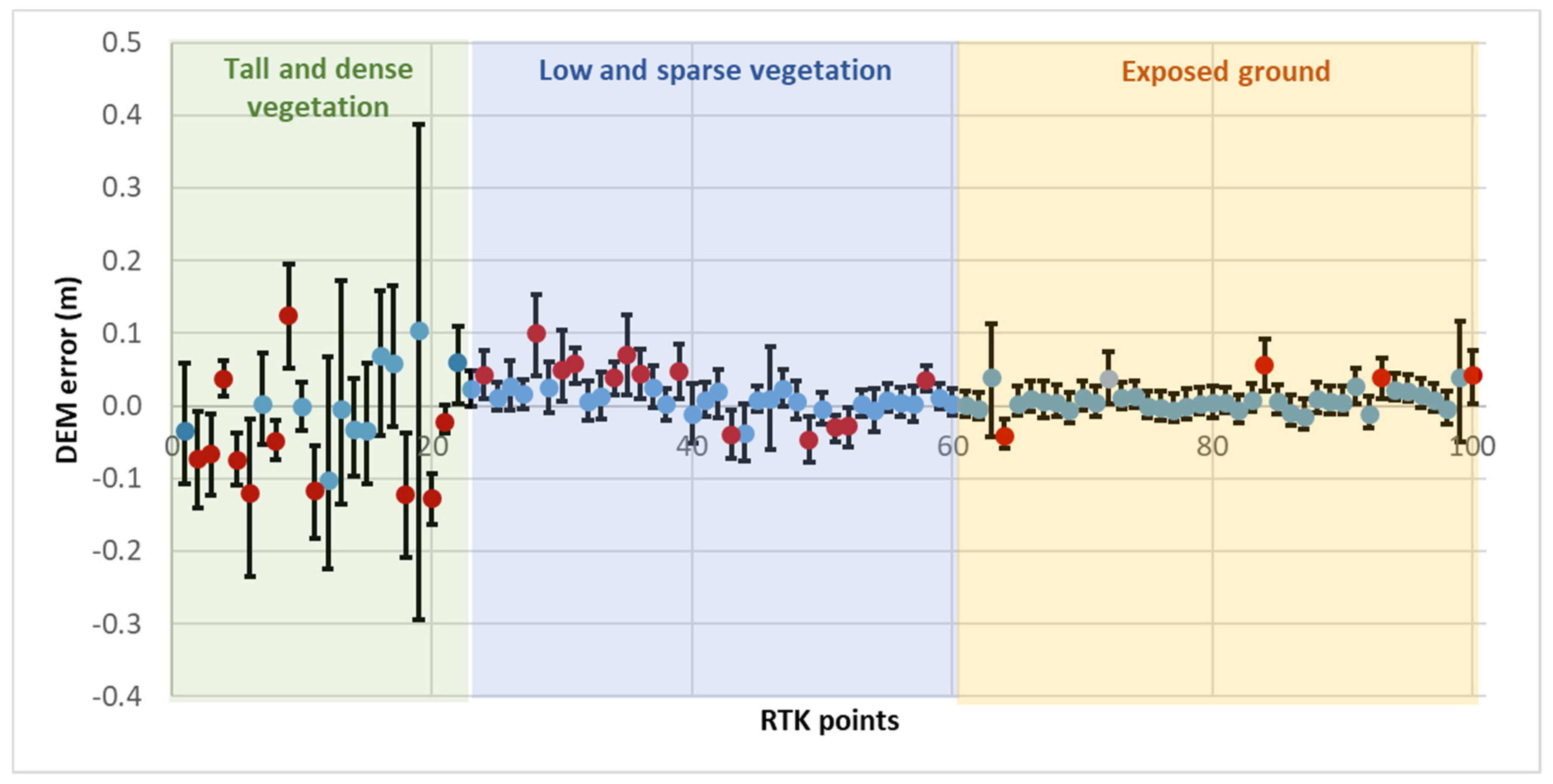
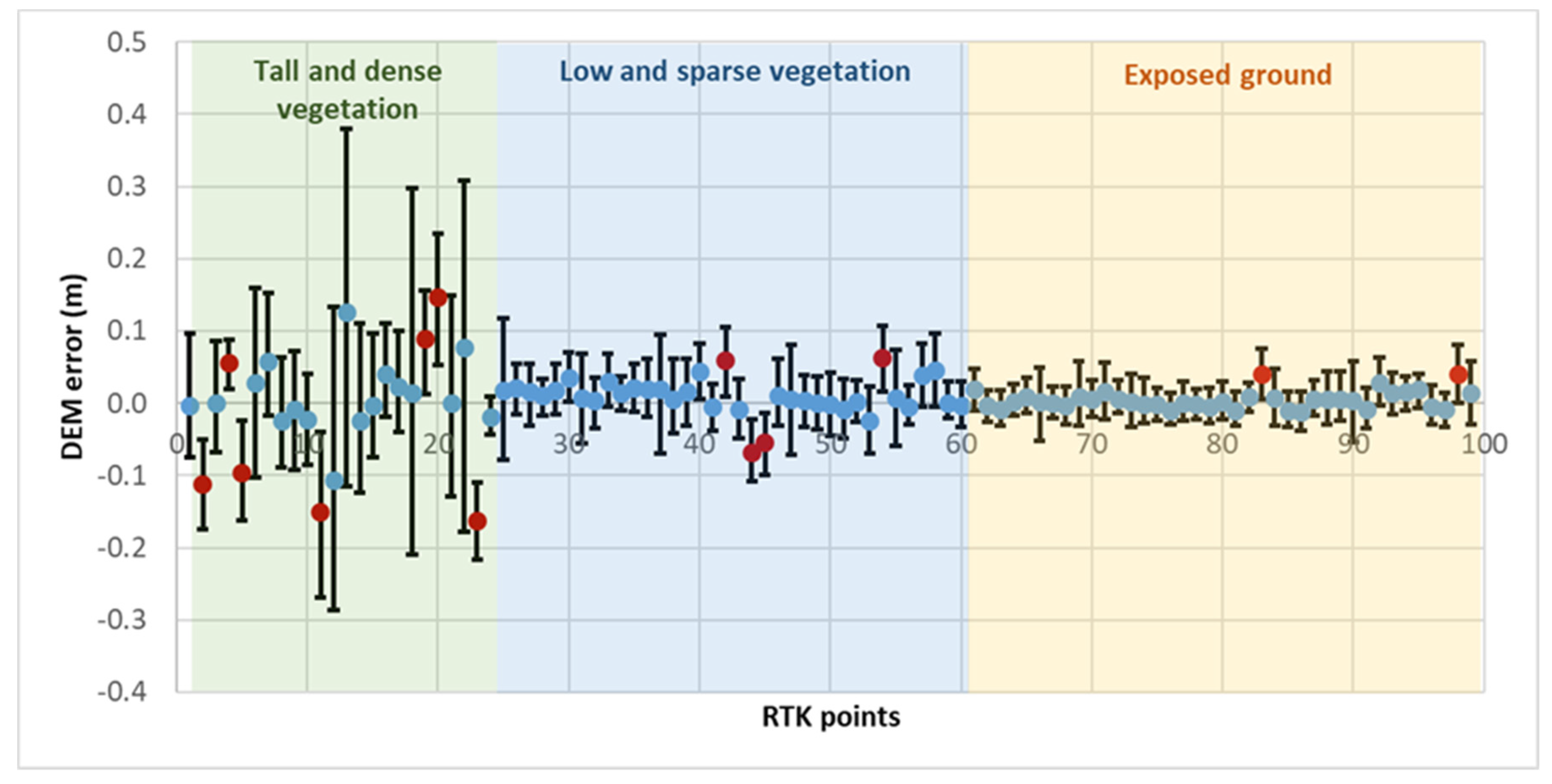
4.3.2. Tolerance Intervals
6 Inputs
12 Inputs
5. Conclusions
- DEM
- 3D point cloud that was used to generate the DEM
- Independent set of higher-order accuracy ground truth samples
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lane, S.N.; Chandler, J.H. Editorial: The generation of high quality topographic data for hydrology and geomorphology: New data sources, new applications and new problems. Earth Surf. Process. Landf. 2003, 28, 229–230. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Hetherington, D. Application of a 3D laser scanner in the assessment of erosion and deposition volumes and channel change in a proglacial river. Earth Surf. Process. Landf. 2007, 32, 1657–1674. [Google Scholar] [CrossRef]
- Heritage, G.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surf. Process. Landf. 2007, 32, 66–74. [Google Scholar] [CrossRef]
- Hofle, B.; Rutzinger, M. Topographic airborne LiDAR in geomorphology: A technological perspective. Z. Geomorphol. 2011, 55, 1–29. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Starek, M.J.; Davis, T.; Prouty, D.; Berryhill, J. Small-scale UAS for geoinformatics applications on an island campus. In Proceedings of the IEEE Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014; pp. 120–127. [Google Scholar]
- Collins, B.D.; Brown, K.M.; Fairley, H.C. Evaluation of Terrestrial LIDAR for Monitoring Geomorphic Change at Archeological Sites in Grand Canyon National Park, Arizona; US Geological Survey: Reston, VA, USA, 2008. Available online: https://pubs.usgs.gov/of/2008/1384/ (accessed on 7 October 2019).
- Starek, M.J.; Mitasova, H.; Hardin, E.; Weaver, K.; Overton, M.; Harmon, R.S. Modeling and analysis of landscape evolution using airborne, terrestrial, and laboratory laser scanning. Geosphere 2011, 7, 1340–1356. [Google Scholar] [CrossRef]
- Lyons, N.J.; Starek, M.J.; Wegmann, K.W.; Mitasova, H. Bank erosion of legacy sediment at the transition from vertical to lateral stream incision. Earth Surface Processes and Landforms. Earth Surf. Process. Landf. 2015, 40, 1764–1778. [Google Scholar] [CrossRef]
- Aguilar, F.J.; Aguera, F.; Aguilar, M.A.; Carvajal, F. Effects of terrain morphology, sampling density, and interpolation methods on grid DEM accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 805–816. [Google Scholar] [CrossRef]
- Guisado-Pintado, E.; Jackson, D.W.; Rogers, D. 3D mapping efficacy of a drone and terrestrial laser scanner over a temperate beach-dune zone. Geomorphology 2018. [Google Scholar] [CrossRef]
- Kirk, D. Analysis of Sediment Erosion and Deposition across High Marsh and Tide Channel Sites in Well Fleet, Massachusetts. Master’s Thesis, East Carolina University, Greenville, NC, USA, 2016. Available online: http://hdl.handle.net/10342/5909 (accessed on 7 October 2019).
- Bangen, S.G.; Wheaton, J.M.; Bouwes, N.; Bouwes, B.; Jordan, C. A methodological intercomparison of topographic survey techniques for characterizing wadeable streams and rivers. Geomorphology 2014, 206, 343–361. [Google Scholar] [CrossRef]
- Schaffrath, K.R.; Belmont, P.; Wheaton, J.M. Landscape-scale geomorphic change detection: Quantifying spatially variable uncertainty and circumventing legacy data issues. Geomorphology 2015, 250, 334–348. [Google Scholar] [CrossRef] [Green Version]
- Starek, M.J.; Mitásová, H.; Wegmann, K.; Lyons, N. Space-time cube representation of stream bank evolution mapped by terrestrial laser scanning. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1369–1373. [Google Scholar] [CrossRef]
- Wechsler, S.P.; Kroll, C.N. Quantifying DEM uncertainty and its effect on topographic parameters. Photogramm. Eng. Remote Sens. 2006, 72, 1081–1090. [Google Scholar] [CrossRef]
- Heritage, G.L.; Milan, D.J.; Large, A.R.G.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- Gong, J.Y.; Li, Z.L.; Zhu, Q.; Sui, H.G.; Zhou, Y. Effects of various factors on the accuracy of DEMs: An intensive experimental investigation. Photogramm. Eng. Remote Sens. 2000, 66, 1113–1117. [Google Scholar]
- Thompson, J.A.; Bell, J.C.; Butler, C.A. Digital elevation model resolution: Effects on terrain attribute calculation and quantitative soil-landscape modeling. Geoderma 2001, 100, 67–89. [Google Scholar] [CrossRef]
- Anderson, E.S.; Thompson, J.A.; Crouse, D.A.; Austin, R.E. Horizontal resolution and data density effects on remotely sensed LIDAR-based DEM. Geoderma 2006, 132, 406–415. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Peterson, J.; Chandra, S. The effect of LiDAR data density on DEM accuracy. In Proceedings of the International Congress on Modelling and Simulation (MODSIM07), Christchurch, New Zealand, 10–13 December 2007; Modelling and Simulation Society of Australia and New Zealand Inc.: Christchurch, New Zealand, 2007; pp. 1363–1369. [Google Scholar]
- Spaete, L.P.; Glenn, N.F.; Derryberry, D.R.; Sankey, T.T.; Mitchell, J.J.; Hardegree, S.P. Vegetation and slope effects on accuracy of a LiDAR-derived DEM in the sagebrush steppe. Remote Sens. Lett. 2011, 2, 317–326. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.; McVey, R. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Murray Hicks, D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Bangen, S.; Hensleigh, J.; McHugh, P.; Wheaton, J. Error modeling of DEMs from topographic surveys of rivers using fuzzy inference systems. Water Resour. Res. 2016, 52, 1176–1193. [Google Scholar] [CrossRef] [Green Version]
- Milan, D.J.; Heritage, G.L.; Large, A.R.G.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Sofia, G.; Pirotti, F.; Tarolli, P. Variations in multiscale curvature distribution and signatures of LiDAR DTM errors. Earth Surf. Process. Landf. 2013, 38, 1116–1134. [Google Scholar] [CrossRef]
- Erdogan, S. Modelling the spatial distribution of DEM error with geographically weighted regression: An experimental study. Comput. Geosci. 2010, 36, 34–43. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Taylor, J.W.; Buizza, R. Neural network load forecasting with weather ensemble predictions. IEEE Trans. Power Syst. 2002, 17, 626–632. [Google Scholar] [CrossRef]
- Tiwari, M.K.; Adamowski, J. Urban water demand forecasting and uncertainty assessment using ensemble wavelet-bootstrap-neural network models. Water Resour. Res. 2013, 49, 6486–6507. [Google Scholar] [CrossRef]
- Hansen, L.K.; Salamon, P. Neural Network Ensembles. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 993–1001. [Google Scholar] [CrossRef]
- Paine, J.G.; White, W.A.; Smyth, R.C.; Andrews, J.R.; Gibeaut, J.C. Mapping coastal environments with lidar and EM on Mustang Island, Texas, U.S. Lead. Edge 2004, 23, 894–898. [Google Scholar] [CrossRef]
- Wang, G.; Soler, T. Measuring land subsidence using GPS: Ellipsoid height versus orthometric height. J. Surv. Eng. 2014, 141, 05014004. [Google Scholar] [CrossRef]
- Fan, L.; Atkinson, P.M. Accuracy of digital elevation models derived from terrestrial laser scanning data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1923–1927. [Google Scholar] [CrossRef]
- Guo, Q.H.; Li, W.K.; Yu, H.; Alvarez, O. Effects of topographic variability and lidar sampling density on several dem interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Sharma, M.; Paige, G.B.; Miller, S.N. DEM development from ground-based lidar data: A method to remove non-surface objects. Remote Sens. 2010, 2, 2629–2642. [Google Scholar] [CrossRef]
- Nguyen, C.; Starek, M.J.; Tissot, P.; Gibeaut, J. Unsupervised clustering method for complexity reduction of terrestrial lidar data in marshes. Remote Sens. 2018, 10, 133. [Google Scholar] [CrossRef]
- Schürch, P.; Densmore, A.L.; Rosser, N.J.; Lim, M.; McArdell, B.W. Detection of surface change in complex topography using terrestrial laser scanning: Application to the Illgraben debris-flow channel. Earth Surf. Process. Landf. 2011, 36, 1847–1859. [Google Scholar] [CrossRef]
- Hartzell, P.J.; Glennie, C.L.; Finnegan, D.C. Empirical waveform decomposition and radiometric calibration of a terrestrial full-waveform laser scanner. IEEE Trans. Geosci. Remote Sens. 2015, 53, 162–172. [Google Scholar] [CrossRef]
- Bowen, Z.H.; Waltermire, R.G. Evaluation of light detection and ranging (lidar) for measuring river corridor topography 1. JAWRA J. Am. Water Resour. Assoc. 2002, 38, 33–41. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Treitz, P. Investigating laser pulse penetration through a conifer canopy by integrating airborne and terrestrial lidar. Can. J. Remote Sens. 2006, 32, 116–125. [Google Scholar] [CrossRef] [Green Version]
- Göpfert, J.; Heipke, C. Assessment of LiDAR DTM accuracy in coastal vegetated areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 79–85. [Google Scholar]
- Coveney, S.; Fotheringham, A.S. Terrestrial laser scan error in the presence of dense ground vegetation. Photogramm. Rec. 2011, 26, 307–324. [Google Scholar] [CrossRef] [Green Version]
- Daliakopoulos, I.N.; Coulibaly, P.; Tsanis, I.K. Groundwater level forecasting using artificial neural networks. J. Hydrol. 2005, 309, 229–240. [Google Scholar] [CrossRef]
- Lourakis, M.I. A Brief Description of the Levenberg-Marquardt Algorithm Implemented by Levmar; Foundation of Research and Technology: Heraklion, Greece, 2005; pp. 1–6. [Google Scholar]
- Wilamowski, B.M.; Yu, H. Improved computation for Levenberg–Marquardt training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the IJCNN 2004 IEEE International Joint Conference on Neural Networks, Budapest, Hungary, 25–29 July 2004; pp. 985–990. [Google Scholar]
- Yonaba, H.; Anctil, F.; Fortin, V. Comparing sigmoid transfer functions for neural network multistep ahead streamflow forecasting. J. Hydrol. Eng. 2010, 5, 275–283. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Repetition Rate | Up to 300,000 kHz |
|---|---|
| Laser wavelength | 1550 nm |
| Beam divergence | 0.3 mrad |
| Spot size | 3 cm at 100-m distance |
| Range | 1.5 m (min), 600 m (max) * |
| Field of view | 100° vertical × 360° horizontal |
| Repeatability | 3 mm (1 sigma @ 100 m range) |
| Core | TLS Specific | ||
|---|---|---|---|
| 1 | Point density ( | 7 | Median amplitude ( |
| 2 | Surface roughness ( | 8 | Median waveform deviation () |
| 3 | Principal component analysis eigenvalue 1st dimension ( | 9 | Median range () |
| 4 | Principal component analysis eigenvalue 2nd dimension ( | 10 | Standard deviation of amplitude ( |
| 5 | Principal component analysis eigenvalue 3rd dimension ( | 11 | Standard deviation of waveform deviation () |
| 6 | Normalized height | 12 | Standard deviation of range () |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, C.; Starek, M.J.; Tissot, P.E.; Cai, X.; Gibeaut, J. Ensemble Neural Networks for Modeling DEM Error. ISPRS Int. J. Geo-Inf. 2019, 8, 444. https://doi.org/10.3390/ijgi8100444
Nguyen C, Starek MJ, Tissot PE, Cai X, Gibeaut J. Ensemble Neural Networks for Modeling DEM Error. ISPRS International Journal of Geo-Information. 2019; 8(10):444. https://doi.org/10.3390/ijgi8100444
Chicago/Turabian StyleNguyen, Chuyen, Michael J. Starek, Philippe E. Tissot, Xiaopeng Cai, and James Gibeaut. 2019. "Ensemble Neural Networks for Modeling DEM Error" ISPRS International Journal of Geo-Information 8, no. 10: 444. https://doi.org/10.3390/ijgi8100444
APA StyleNguyen, C., Starek, M. J., Tissot, P. E., Cai, X., & Gibeaut, J. (2019). Ensemble Neural Networks for Modeling DEM Error. ISPRS International Journal of Geo-Information, 8(10), 444. https://doi.org/10.3390/ijgi8100444