1. Introduction
In recent years, numerous types of sensors have been connected to the Internet of Things (IoT) and have produced huge volumes of data with high velocity. A large percentage of these sensor big data is geospatial data, describing information about physical things in relation to geographic space that can be represented in a coordinate system [
1,
2,
3,
4]. With the advance of IoT technologies, more diverse data have now become available, thereby greatly increasing the amount of geospatial big data.
Given the general properties of big data, the unique characteristics of geospatial data create an innovative challenge in data preparation [
5]. Geospatial data typically include position data. These coordinate data differ from normal string or integer data, requiring the data pre-processing process to include a lot of floating-point arithmetic computations. Examples include transformation in geometry, converting coordination reference systems, and evaluating spatial relationships. Among these, the most well-known aspect of geospatial data is spatial relationship, describing the relationship of some objects in a specific location to other objects in neighboring locations. The calculation of spatial relationship is mostly included in spatial analysis and has been generally regarded as a sophisticated problem [
6]. Moreover, processing temporal elements also complicates the handling of geospatial data.
To deal with the challenges in processing and analyzing geospatial big data, several systems have emerged. Systems designed for big data have existed for years (e.g., Hadoop [
7] and Spark [
8]); however, they are uninformed about spatial properties. This has led to a number of geospatial systems (e.g., SpatialHadoop [
9] and GeoSpark [
10]) being developed, mostly by injecting spatial data types or functions inside existing big data systems. Hadoop, especially, has proven to be a mature big data platform and so several geospatial big data systems have been constructed by inserting spatial data awareness into Hadoop. However, it is still not easy for big data software developers to create geospatial applications. Typically, to generate a MapReduce job for a required operation in Hadoop, developers need to program a map and reduce functions. Spatial analysis usually requires handling more than one MapReduce step, where the output of the data from a previous MapReduce step becomes the input to the next MapReduce step. As the complexity level of spatial analysis is increased, the number of MapReduce steps is also increased, resulting in augmented difficulties for the developers to write iterative code to define the increasingly more complicated MapReduce steps.
To resolve this issue, in our previous work [
11], we found a way to represent spatial analysis as a sequence of one or more units of spatial or non-spatial operators. This allows developers of geospatial big data applications to create spatial applications by simply combining built-in spatial or non-spatial operators, without having any detailed knowledge of MapReduce. Once the sequence of operators has been incorporated, it is automatically transformed to the map and reduces jobs in our Hadoop-based geospatial big data system. During this conversion process, our system controls the number of MapReduce steps in such a way as to achieve better performance by decreasing the overhead of mapping and reducing. The challenges for geospatial big data, however, lie in confronting not only how to store and analyze the data, but also how to transform the data while achieving good performance.
Currently, a large amount of geospatial data is continuously provided from many spatial sensors. It is important to analyze this geospatial big data as soon as possible to extract useful insights. However, the time required to transform massive amounts of geospatial data into the Hadoop platform has gradually increased. That is, it takes a lot of time to prepare the data required for geospatial analysis, thereby delaying obtaining the results of spatial analysis results. For example, we found that it took about 13 hours and 30 minutes to load 821 GB of digital tachograph (DTG) data using the traditional ETL method. In the ETL process, data are extracted from data sources, then transformed, involving normalization and cleansing, and loaded into the target data base. The conventional ETL system is typically operated on a single machine that cannot effectively handle huge volumes of big data [
12]. To deal with the considerable quantity of big data in the ETL process, there have been several attempts in recent years to utilize a parallelized data processing concept [
13,
14,
15].
One study [
14] proposed ETLMR using a MapReduce framework to parallelize ETL processes. ETLMR is designed by integrating with Python-based MapReduce. This study conducted an experimental evaluation assessing system scalability based on different scales of jobs and data to compare with other MapReduce-based tools. Another study [
15] compared Hadoop-based ETL solutions with commercial ETL solutions in terms of cost and performance. They concluded that Hadoop-based ETL solutions are better in comparison to existing commercial ETL solutions. The study in [
16] implemented P-ETL (parallel-ETL), which is developed on Hadoop. Instead of the traditional three steps of extracting, transforming, and loading, P-ETL involves five steps of extracting, partitioning, transforming, reducing, and loading. This study has shown that P-ETL outperforms the classical ETL scheme. Many studies, however, have focused on big data analysis, but there have been insufficient studies attempting to increase the speed of preparing the data required for big data analysis.
In this paper, we continue our previous study on storing and managing geospatial big data and explain our approach to enhance the performance of ETL processes. Specifically, we propose a method to start geospatial big data analysis in a short time by reducing the time required for data transformation under the Hadoop platform. A transformation is defined as data processing achieved by converting source data into a consistent storage format aiming to query and analyze. Due to the complex nature of transformations, performance of the ETL processes depend mostly on how efficiently the transformations are conducted, which is the rate-limiting step in the ETL process. Our approach allows MapReduce-based parallelization of the transformation in the ETL process. Among the various sources of geospatial big data, we concentrate on sensor big data. With the increasing number of IoT sensing devices, the amount of sensor data is expected to grow significantly over time for a wide range of fields and applications. IoT-based sensor data are, however, essentially loosely structured and typically incomplete, much of it being directly unusable. In addition, in the IoT environment, the update period—the time between the arrival of raw data and when meaningful data are made available—occurs more frequently than for typical batch data. These difficulties require that considerable resources are used for transformation in the ETL process.
This paper extends our research work presented in [
11] and suggests a way to increase performance of the transformation functionality in the ETL process by taking advantage of the MapReduce framework. First, in
Section 2 we briefly explain our previous work on constructing a geospatial big data processing system by extending the original Hadoop to support spatial properties. We focus particularly on explaining automatically converting a user-specified sequence of operators for spatial analysis to MapReduce steps.
Section 3 describes up-to-date ETL research followed by our approach on improving performance of transformation in the ETL processes based on MapReduce. Our conducted experimental settings and results are described in
Section 4 and
Section 5, respectively.
Section 6 concludes our work and presents our plans for future research.
2. Geospatial Big Data Platform
In our previous study [
11], we developed a high performance geospatial big data processing system based on Hadoop/MapReduce, named Marmot [
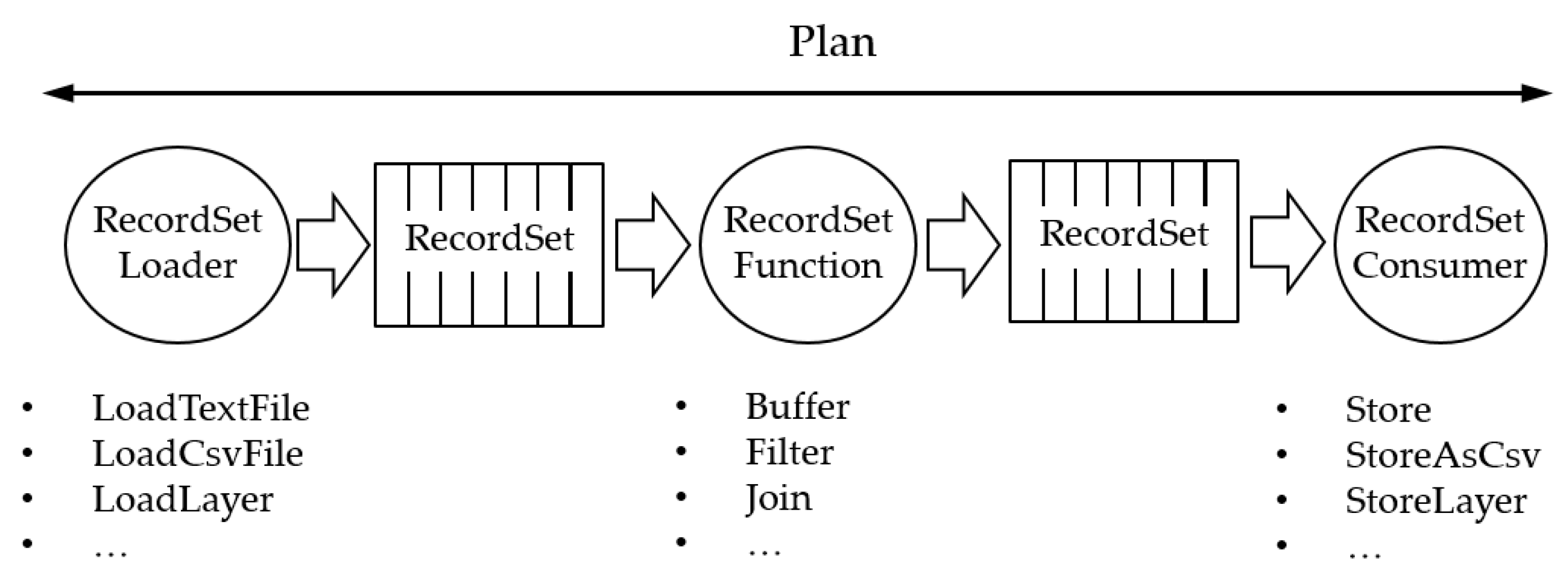
17]. In Marmot, spatial analysis is defined as a sequence of RecordSetOperators, where a RecordSet is a collection of records and a RecordSetOperator is a processing element using a RecordSet, similar to a relational operator in Relational Database Management System (RDBMS). A sequence of RecordSetOperators is defined as a Plan, as shown in
Figure 1.
In Marmot, a RecordSetOperator is classified as three possible types: RecordSetLoader, RecordSetFunction, or RecordSetConsumer. RecordSetLoader is a non-spatial operator loading source data and transforming it to a RecordSet; RecordSetFunction is a spatial or non-spatial operator taking a RecordSet as source data and producing a new RecordSet as output data; RecordSetConsumer is a non-spatial operator storing a finally created RecordSet as a result of a given spatial analysis outside of Marmot.
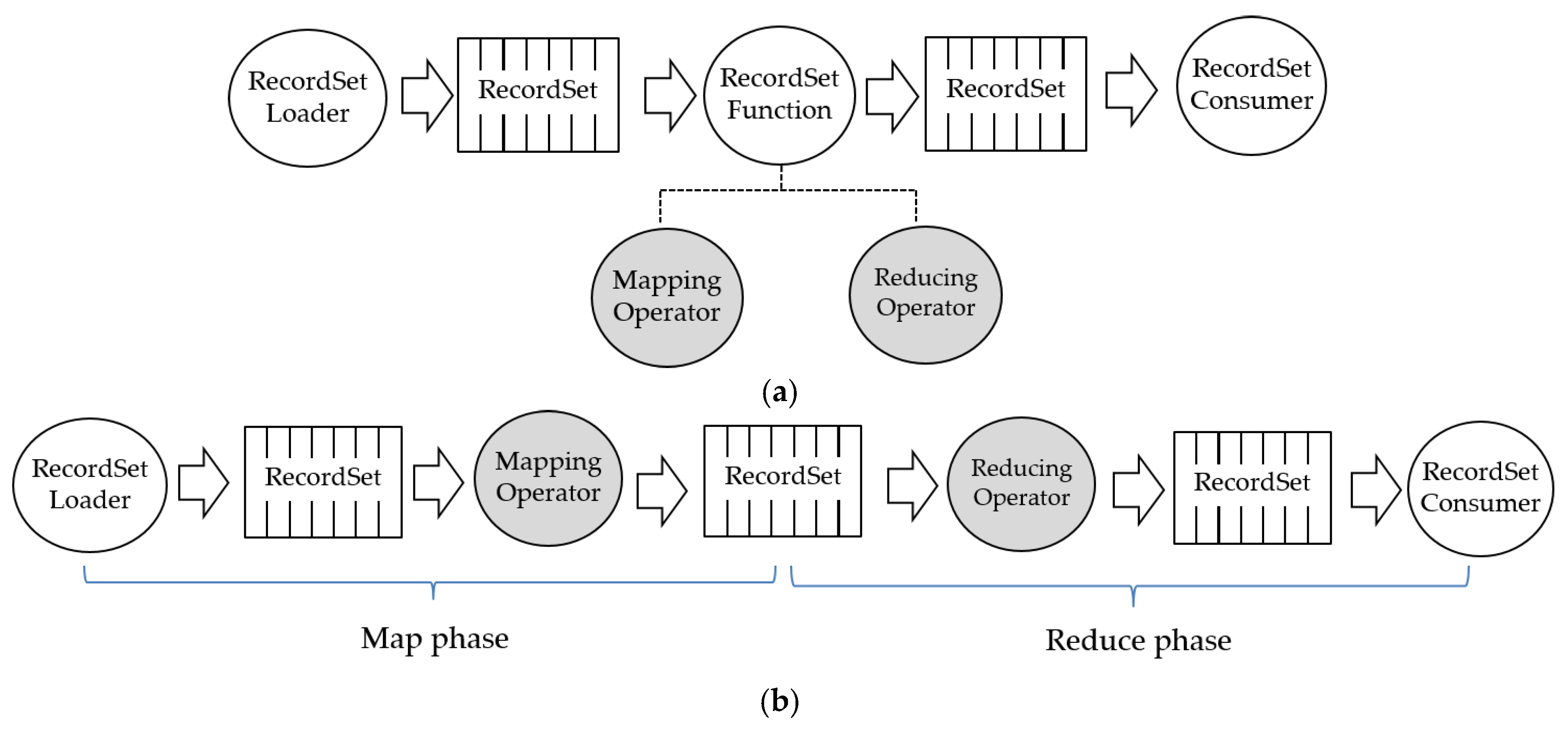
To process a given spatial analysis, a developer creates a corresponding Plan by combining spatial operators and non-spatial operators and injects the Plan into Marmot. Marmot processes each RecordSetOperator one by one and automatically transforms the given Plan to map and reduce jobs, as shown in
Figure 2.
While parsing a given Plan, when Marmot meets a RecordSetFunction that can be separated into mapping and reducing operators (e.g., ReduceByGroupKey), as shown in
Figure 2a, Marmot decomposes the RecordSetFunction into the mapping operator and reducing operator, and eventually transforms the Plan into MapReduce jobs consisting of map and reduce phases, as shown in
Figure 2b. During this transformation, Marmot controls the number of MapReduce phases in a way to achieve better performance by decreasing the overhead of mapping and reducing. To describe how Marmot handles such processes in detail, an example of spatial analysis to retrieve subway stations in a city is shown in
Figure 3 and
Figure 4.
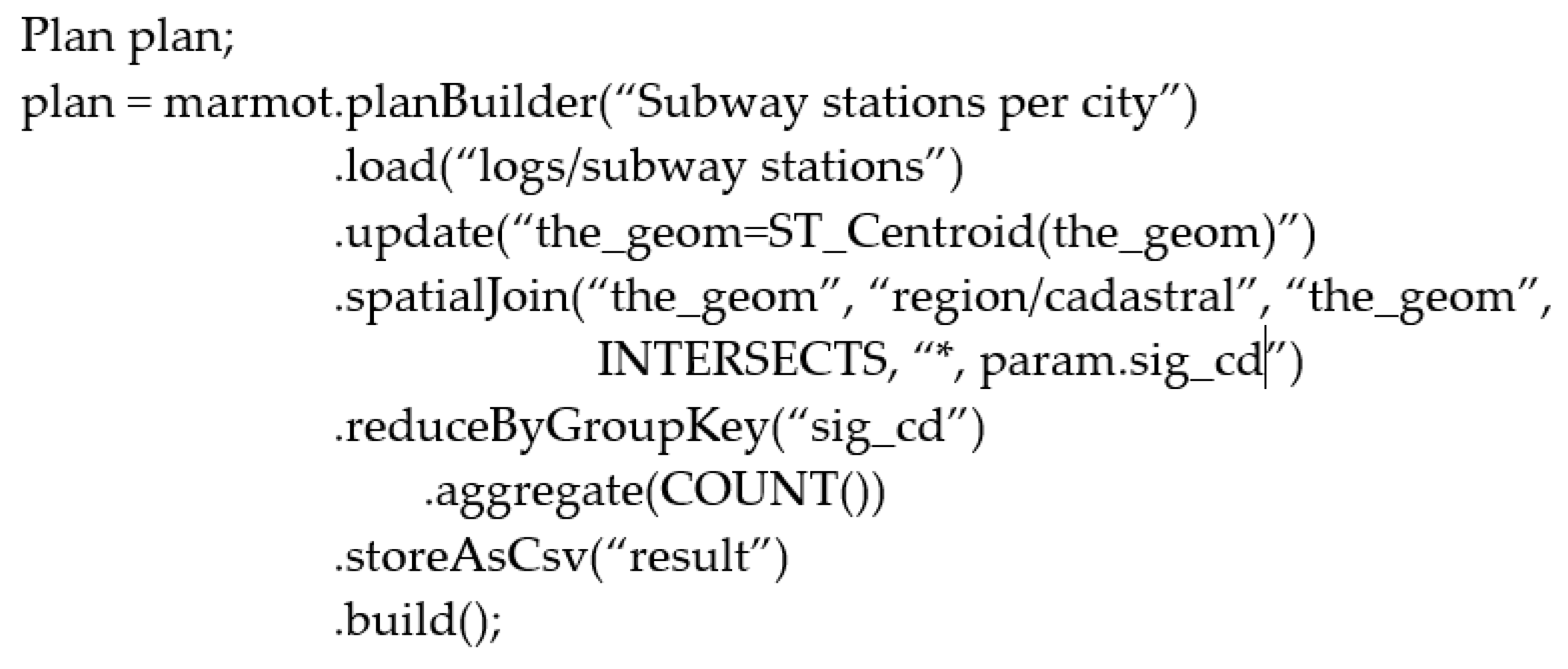
Figure 3 is a Marmot code for an example of spatial analysis. The analysis is represented as a Plan consisting of five RecordSetOperators: Load, Update, SpatialJoin, ReduceByGroupKey, and StoreAsCsv. As shown in
Figure 4, using the Load operator, Marmot reads the boundaries of each subway station and computes their center coordinates. The calculated center points are then utilized as the representative locations of each subway station via the Update operator. For each subway station, using the SpatialJoin operator, Marmot identifies the city that is the center point of the subway station. Finally, the number of subway stations per city is calculated via the ReduceByGroupKey operator and the results are stored in a CSV file named “result” via the StoreAsCsv operator.
During the process of transforming the Plan to a sequence of MapReduce jobs, ReduceByGroupKey is decomposed into GroupBy and Reduce as a mapping operator and a reducing operator, respectively. Accordingly, Load, Update, SpatialJoin, and GroupBy are executed during the Map phase; Reduce and StoreAsCsv, during the Reduce phase.
3. Our MapReduce-Based D_ELT Framework
As mentioned in the previous section, we constructed the Marmot, high-performance data management system that enables developers with no specific knowledge of big data technologies to implement improved performance spatial analysis applications to geospatial big data. The issues concerning geospatial big data, however, lie not only in how to efficiently manage the data for fast analysis, but also in how to efficiently transform the data for fast data preparation.
DTG data, for example, have been used to analyze the status of transportation operations to identify improvement points and to identify disadvantaged areas in terms of public transportation. Transportation authorities, e.g., the Korea Transportation Safety Authority, collect DTG data from commercial vehicles and apply analytics to such big data to extract insights and facilitate decision making. Often, the results of data analysis must be derived periodically within a specific time, e.g., every single day, to be prepared for emergent cases. In this situation, to complete the given analysis in time, not only the data analysis speed, but also the data preparation speed is a critical factor affecting the overall performance. In the IoT environment, update latency for sensor big data, the focus of this paper among various sources of geospatial big data, is typically short and old data are not worth further analysis, making data preparation speed even more important. Moreover, sensor big data is machine-generated; therefore, the source data contains more noise or errors compared to human-generated data, complicating data preparation even more.
Traditional ETL [
18,
19,
20] can no longer accommodate such situations. The ETL is designed for light-weight computations on small data sets, but is not capable of efficiently handling massive amounts of data.
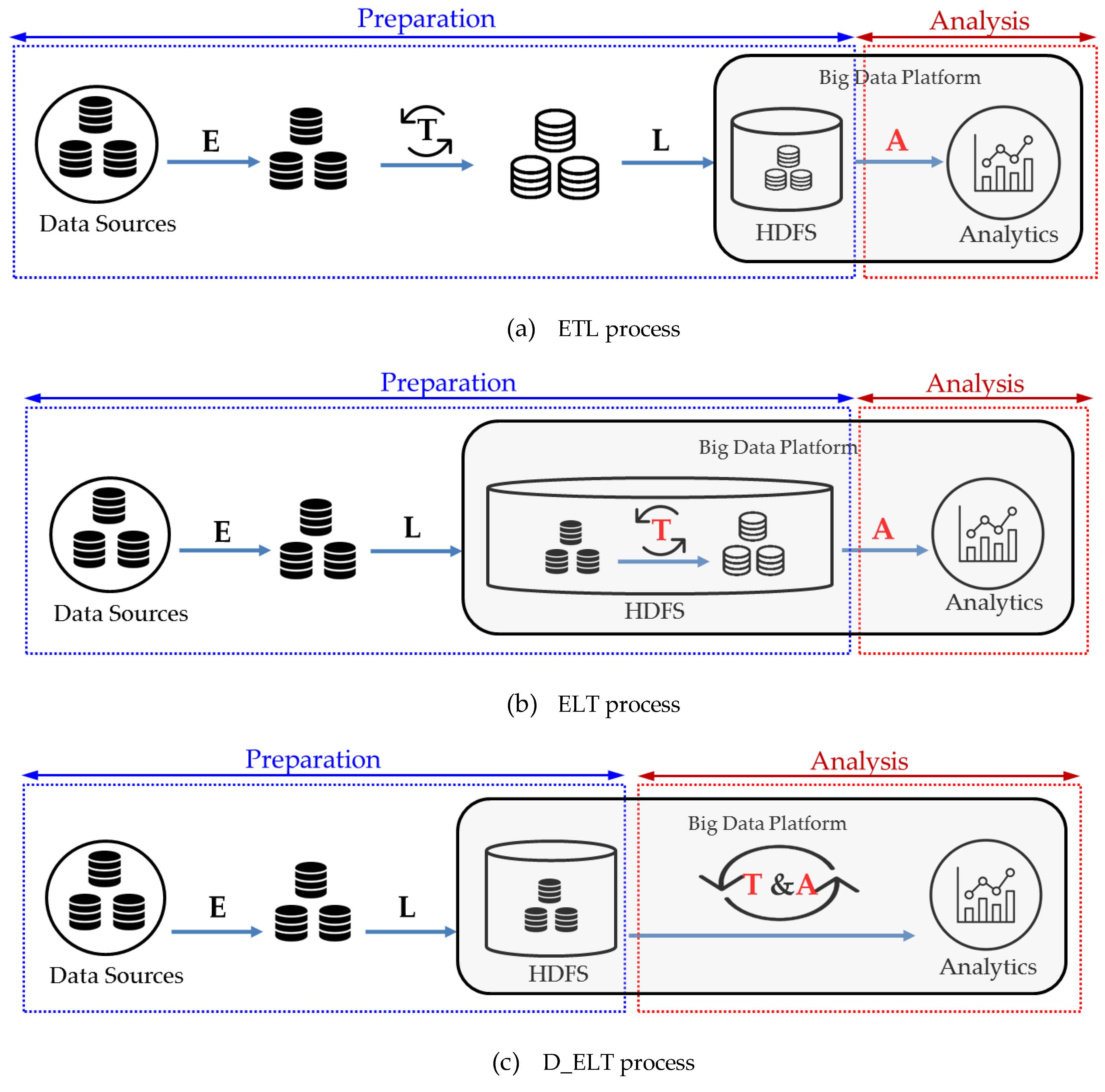
Figure 5a describes the data preparation and analysis in the ETL process. In this approach, data are extracted from various sources and then transformed on an ETL server, which is typically one machine, and loaded into a Hadoop distributed file system (HDFS). The loaded data are finally analyzed in a big data platform for decision-making. In this approach, an
analysis operation is processed in a parallel/distributed way using MapReduce [
21,
22], which guarantees reasonable performance, but bottlenecks can occur during a
transform operation. In fact,
transform is the most time consuming phase in ETL because this operation includes filtering or aggregation of source data to fit the structure of the target database. Data cleaning should also be completed for any duplicated data, missing data, or different data formats. Moreover, in big data environments, due to heterogeneous sources of big data, the traditional
transform operation will create even more computational burdens. The overall performance of the ETL processes, therefore, depends mainly on how efficiently the
transform operation is conducted.
To overcome the drawbacks of traditional ETL and to speed up the data preparation process, the processes of ELT was devised [
23,
24,
25]. The nature of traditional ETL is to perform
transform immediately after the
extract operation and then start the
load operation. In contrast, the basic idea of ELT is to conduct the
load operation immediately after the
extract operation, and perform the
transform after storing the data in the HDFS, as shown in
Figure 5b. This approach has several advantages over ETL. The
transform operation can be done at the run time when needed and it is possible to use
transform even multiple times to handle changing requirements for data. In addition, this approach eliminates a separate transformation engine, the ETL server, between the source and target and makes the overall system less costly. Above all, ELT allows raw source data to be loaded directly into the target and also leverages the target system to perform the
transform operation. In that sense, ELT can speed up
transform using parallelization/distribution supported in the Hadoop-based big data platform.
Despite these advantages, ELT still has limitations in handling big data. The ELT framework can speed up transform using MapReduce, but analysis is initiated only after the transform has been completed. In this approach, it is difficult to optimize transform in conjunction with analysis because the transform is performed in a batch regardless of the context of analysis. For example, in the case of geospatial data, one of the high computational overheads in conducting transform occurs during type transformation, such as converting the x–axis and y–axis of plain-text into (x,y) coordinates of the point and coordinate system transformation for conducting spatial analysis. If analysis does not require such tasks, it is possible to identify them at the transform phase and load only the required data. By doing so, the system can eliminate unnecessary transformations and speed up performance.
To achieve better scalability and performance in conducing
transform on geospatial big data, this paper offers a new approach for data preparation called D_ETL—in the sense that the decision of how to perform
transform is delayed until the context of
analysis is understood. As shown in
Figure 5c, in our approach,
transform is executed in parallel/distributed with
analysis within our geospatial big data platform, Marmot. In Marmot, the operators for
transform are considered a type of RecordSetOperator and are also composed of a Plan, along with the existing RecordSetOperator designed for
analysis. This approach has the advantage that data preparation and analysis processes are described using the same data model. Application developers, therefore, can be free from the inconvenience of having to get used to implementing both processes.
Regarding the operators required to conduct
transform, the application developer specifies them in the D_ELT script. In this way, the developer can implement both data preparation and analysis simultaneously, without having to modify the existing code for conducting
analysis. The D_ELT script consists of the names of operators and a list of the key-values of the parameters, as shown in
Figure 6. For convenience, if a developer needs a new operator for conducting
transform, the operator can be separately implemented as a form of plug-in and can be used in Marmot, in the same way as for existing operators.
To perform a spatial analysis, Marmot first loads the D_ELT script to determine what operators need to be executed for
transform. Then, Marmot (1) examines the operators needed to be executed for
analysis, (2) loads only the required data based on the need of
analysis, and (3) executes both
transform and
analysis in a parallel distributed way. At this time, part of the transformed data can be used for
analysis and not have to wait for all the data to finish being transformed.
Figure 7 shows the sequence of operators executed for
transform and
analysis and their composition as a form of a plan. In this example Plan, “ParseCSV” is the operator for
transform and “Filter” is the operator for
analysis. They are allocated in the Map phase and executed in a parallel distributed way. The outputs from the Map phase are combined during the Reduce phase and the results are written in the output file.
The reason why we implemented D_ELT using MapReduce instead of Spark, another well-known engine for big data processing, is that our previously developed geospatial big platform is based on Hadoop and we had the goal of improving the data transformation time in that environment. In addition, the data we are currently handling is a large amount of DTG data, generating 20–30 TB every month. Using Spark, when running spatial analysis based on this large size of data, we anticipated that unexpected problems may occur (e.g., disk swapping), but to our knowledge, concrete solutions have not yet been proposed.
It is also important to note that ELT and D_ELT are identical in terms of performing data transformation during the MapReduce phase in Hadoop. The difference between ELT and D_ELT is as follows. In ELT, once raw data are uploaded to Hadoop, the data are transformed using MapReduce. After completely finishing the transformation, analysis is then started using another MapReduce. In D_ELT, however, data transformation is not conducted, although all of the raw data are uploaded to Hadoop but delayed until the time of conducting the analysis. That is, the transformation task is piggybacked onto the analysis task and both tasks are performed together using the same MapReduce. In this way, part of the transformed data can be used for analysis immediately without having to wait for all the data to be transformed.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}