Abstract Topological Data Structure for 3D Spatial Objects


Abstract
:1. Introduction
2. Three-Dimensional (3D) Spatial Modeling and Data Structure
3. Compact Abstract Cell Complexes (CACC)
- Vertices, edges, and cycles: Vertices that are connected to edges are not represented per se. Only the vertices that do not belong to any edge are represented as degenerate cycles that are artificially connected to the face or volume to which they belong: (vertexid; ownerid; ownertype).
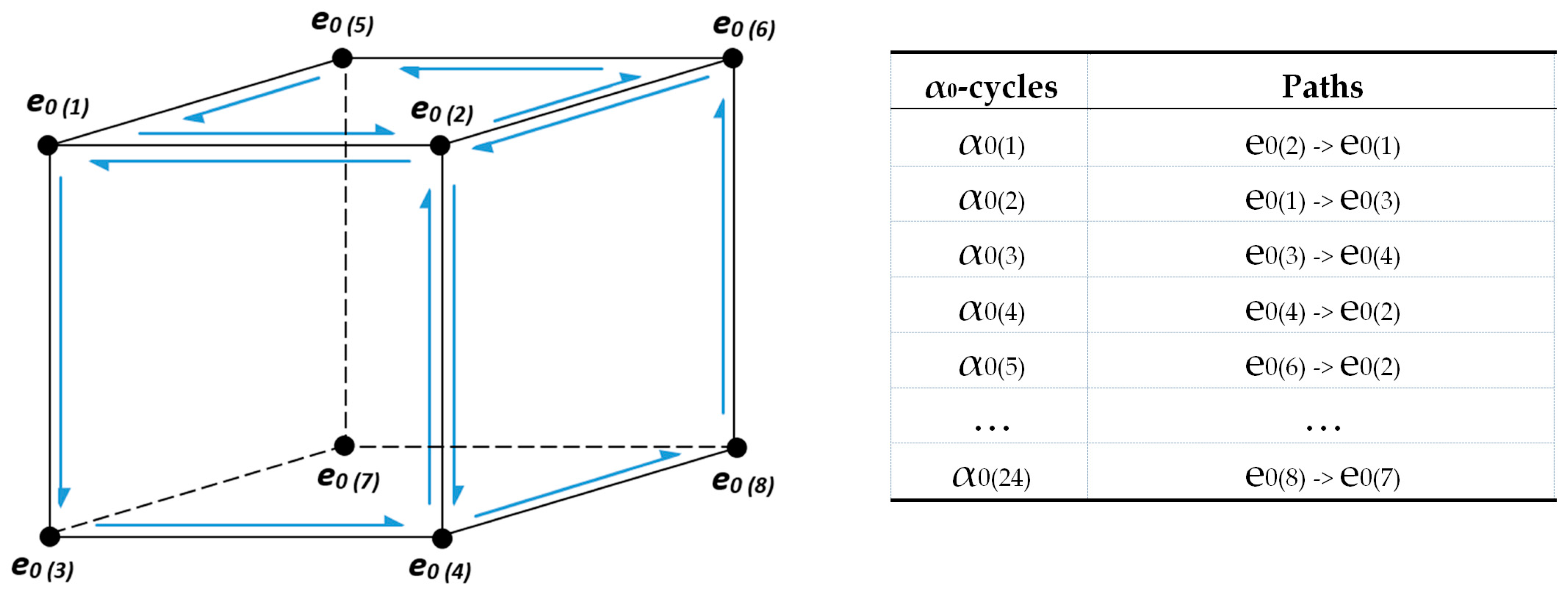
- α0-cycles: α0-cycles are all the cycles that define paths through 0-dimensional cells (vertices), i.e., edges or paths that connect vertices not contained in any edge to the cell of smallest dimension (face or volume in 3D or any cell of dimension at least 2 in nD) that contains it (see Figure 1). The later paths do not exist in the case of connected 3D city models (i.e., consisting of only one connected component). Furthermore, the α0-cycles that do not appear in the list of elements of any α1-cycle are cycles that are not boundaries.
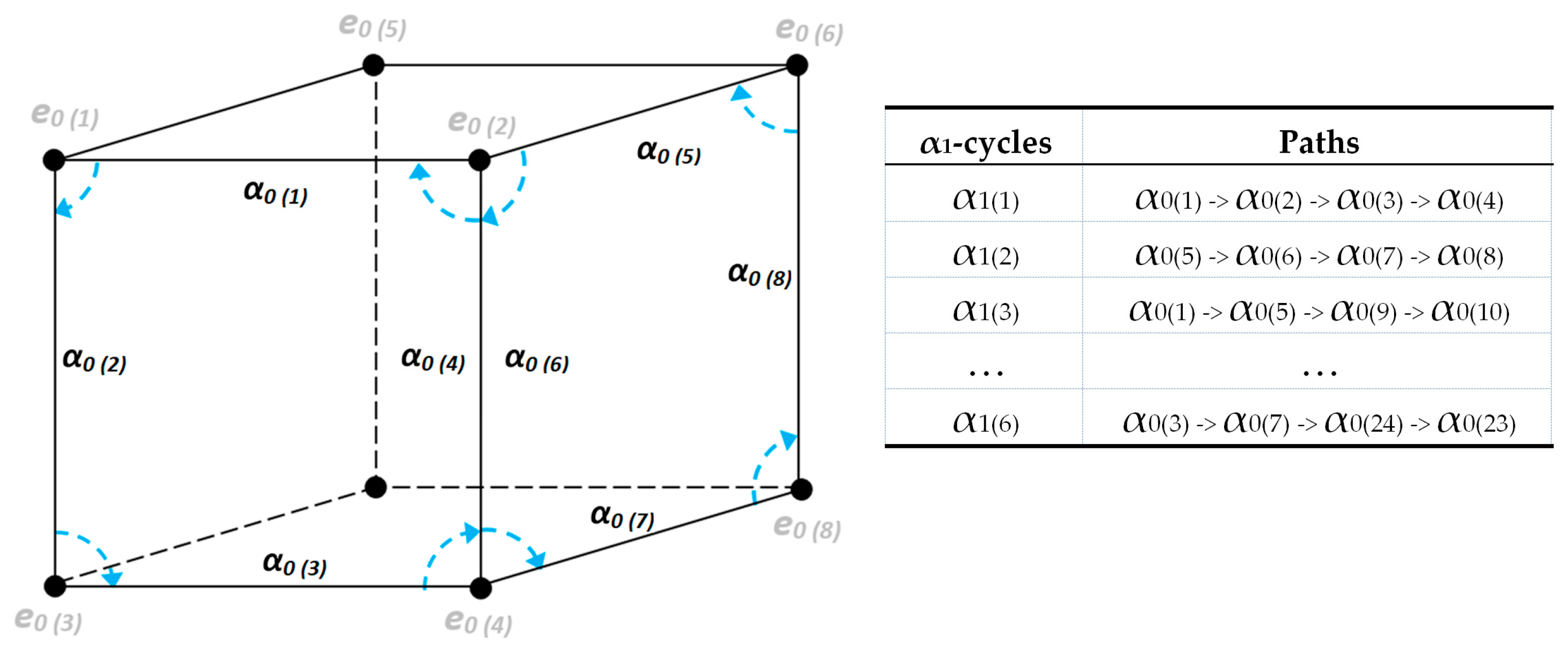
- α1-cycles: α1-cycles (see Figure 2) are all the cycles that define paths through one-dimensional cells (edges), i.e., faces or paths that connect edges not contained in any face to the cell of smallest dimension (the volume in 3D or any cell of dimension at least 3 in nD) that contains it. The later paths do not exist in the case of connected 3D city models (i.e., consisting of only one connected component). Each cycle of edges is assumed to be ordered in the clockwise orientation from a viewpoint in the interior of the volume to which it belongs. Furthermore, the α1-cycles that do not appear in the list of elements of any α2-cycle are cycles that are not boundaries.
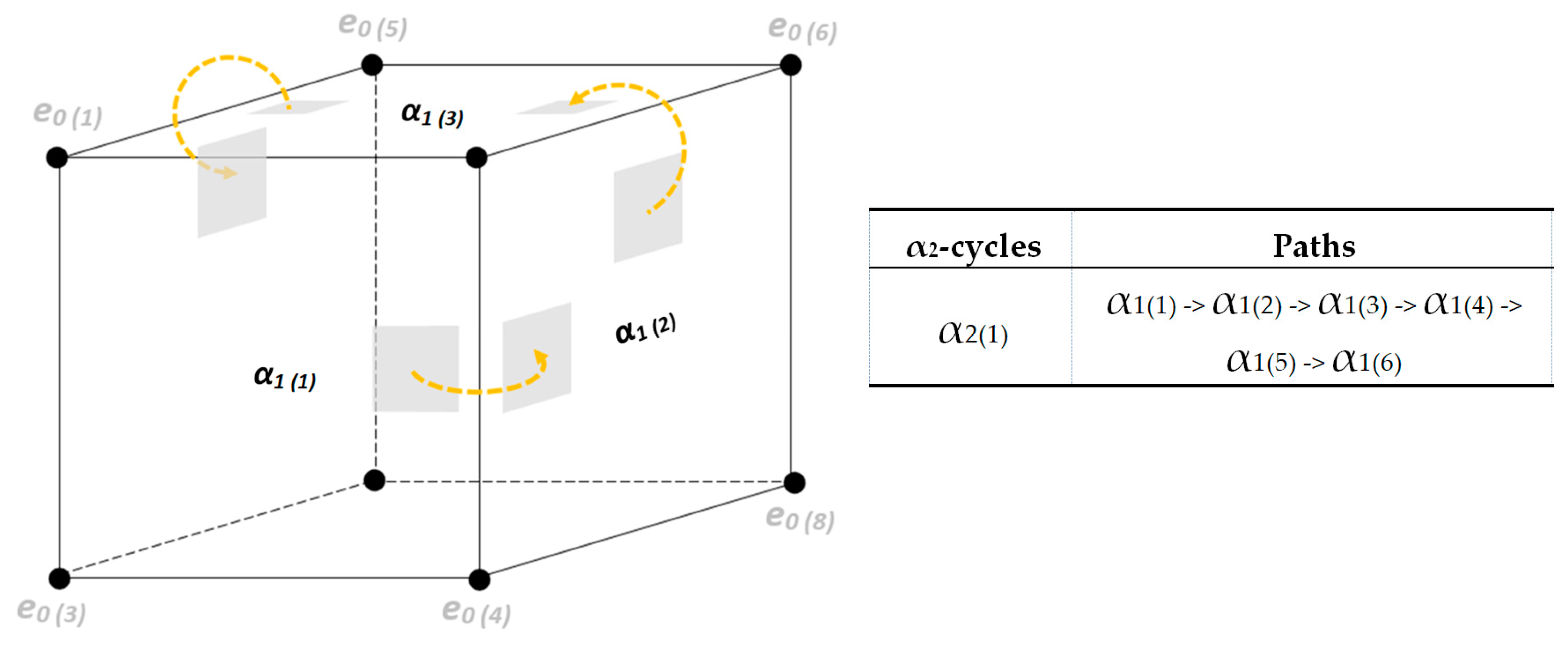
- α2-cycles: as illustrated in Figure 3, α2-cycles are all the cycles that define paths through two-dimensional cells (faces), i.e., volumes or paths that connect faces not contained in any volume to the cell of smallest dimension (any cell of dimension at least 4 in nD) that contains it. The later paths do not exist in the case of 3D city models. Each cycle of faces is assumed to be ordered in the clockwise orientation from a viewpoint in the interior of the volume to which it belongs.
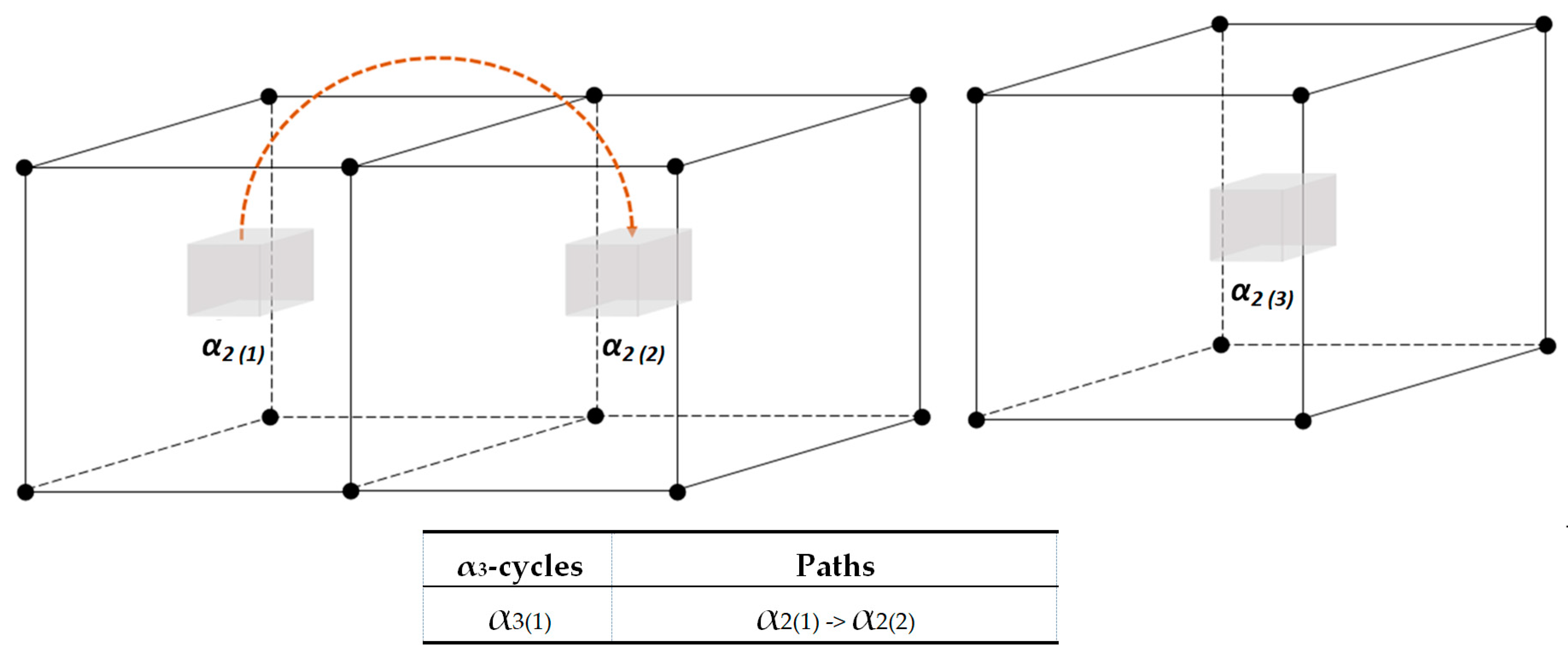
- α3-cycles: α3-cycles are all the cycles that define paths through three-dimensional cells (i.e., volumes), that is, volume adjacencies in 3D or paths that connect three-dimensional volumes not contained in any four-dimensional cell to the cell of smallest dimension (any cell of dimension at least 5 in nD) that contains it (see Figure 4). The later paths do not exist in the case of 3D city models.
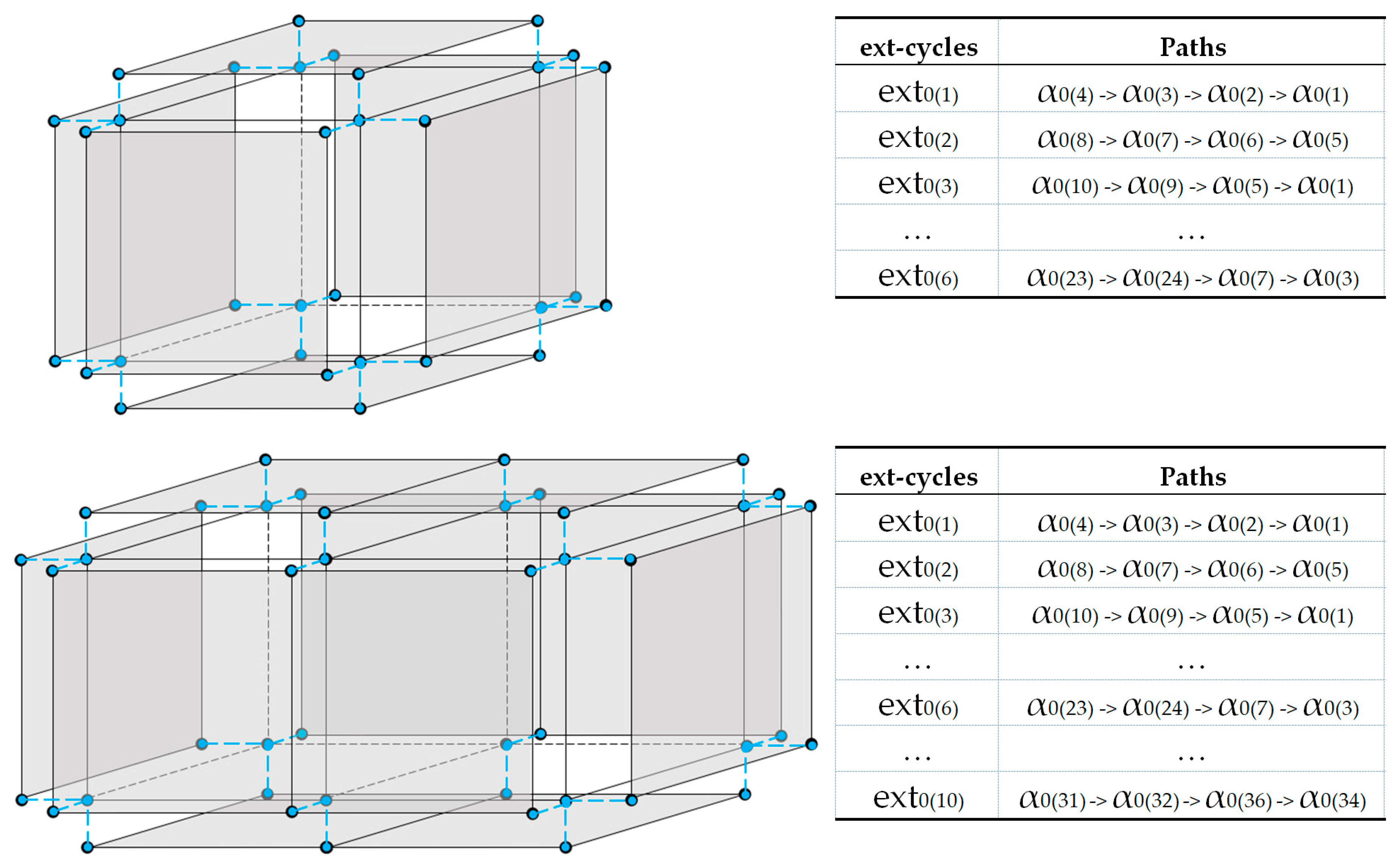
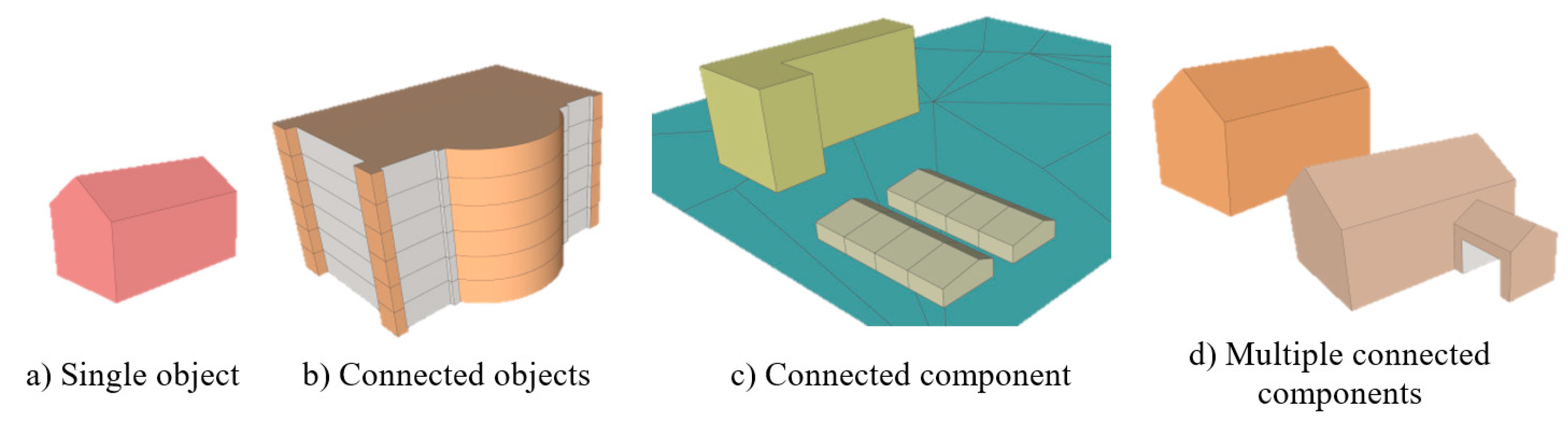
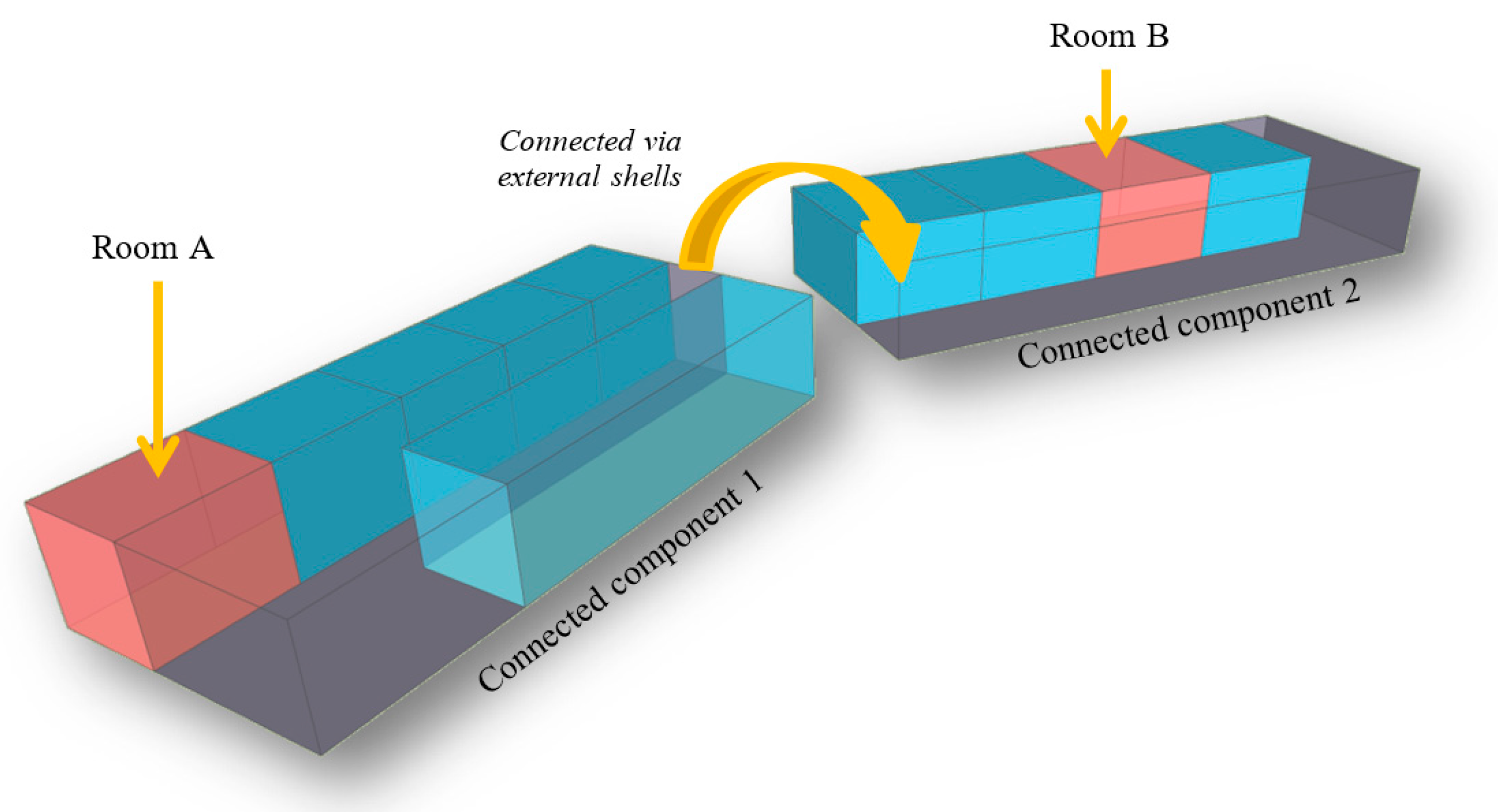
- External cycles: External cycles are cycles of facets that separate the unbounded hyper-volume containing the points at infinity from the interior of the bounded volumes of the model. There is one such cycle of facets for each connected component of adjacent bounded hyper volumes. External cycles are stored as a list of cycles of facets with opposite orientation (i.e., in the clockwise orientation from a viewpoint that belongs to the unbounded volume containing the points at infinity). In other words, external cycles are the universe itself with empty space(s) or hole(s). The holes are the spatial objects that exist in the model. Figure 5 shows two examples of a single 3D object (above) and a single 3D connected component object (below).
- Hilbert curves: Hilbert curves are n-dimensional space-filling curves (i.e., the union of all the cells attached to each vertex of a Hilbert curve is the full topological space in which the cells are placed) induced by a tessellation of the space into interval boxes. The 3D Hilbert curve (of length m3) induced by the preceding tessellation in a 3D space connects all cell centroids in a defined order.
4. Experiments and Results
4.1. The Connectivity—Boundaries
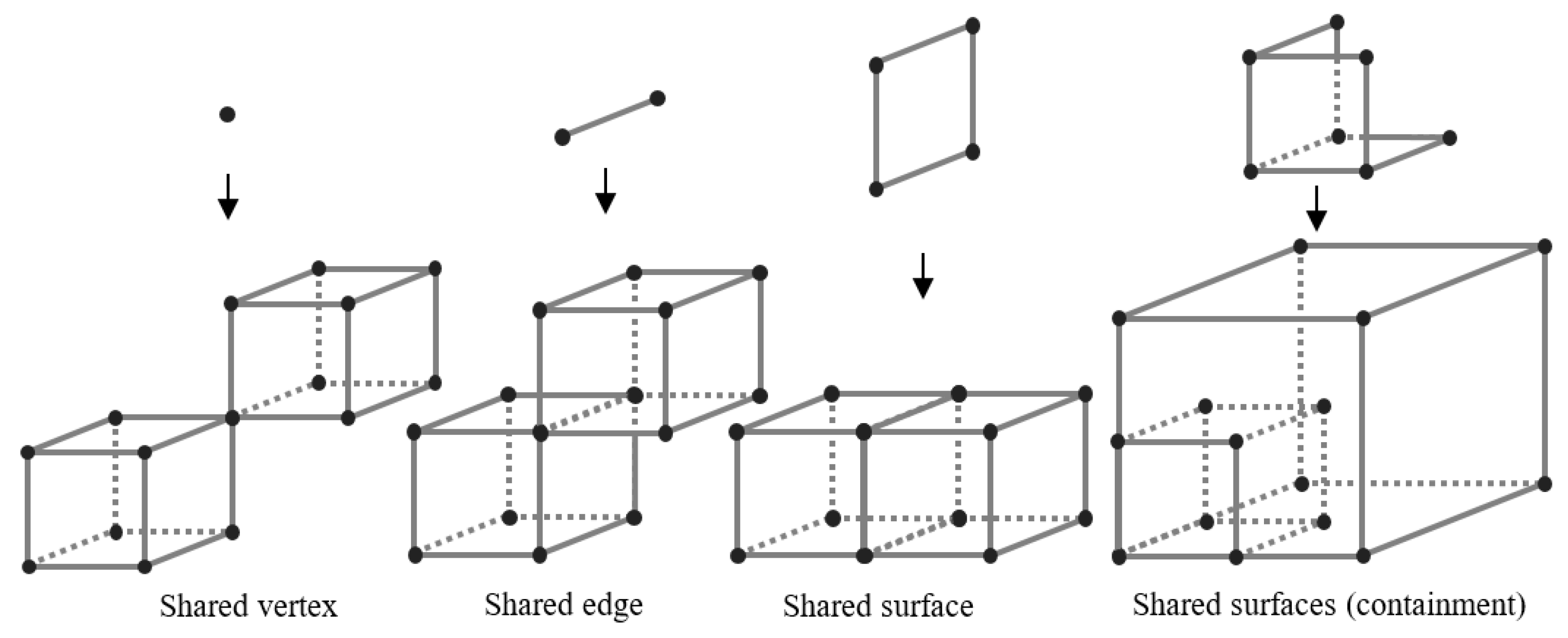
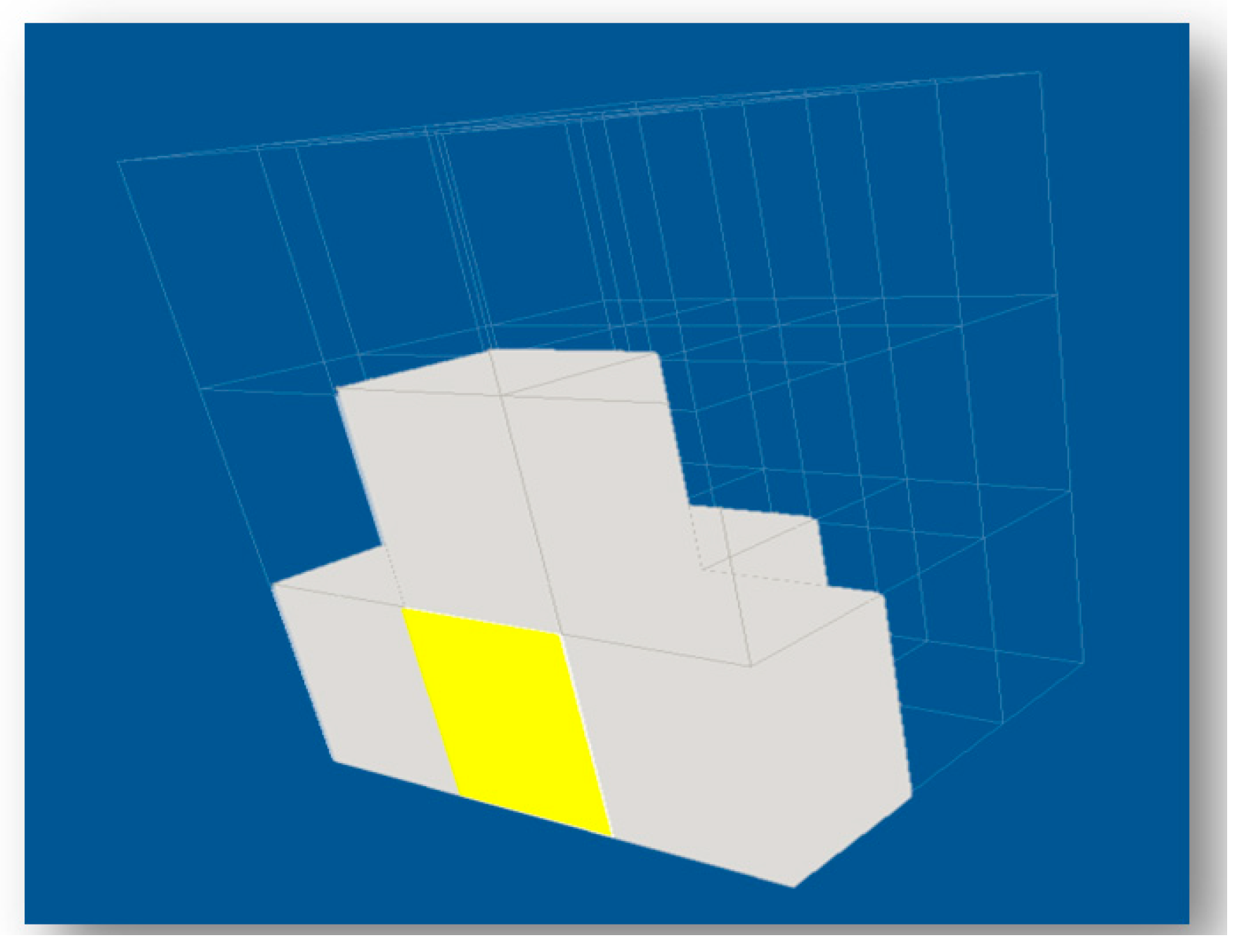
4.1.1. Common Surfaces
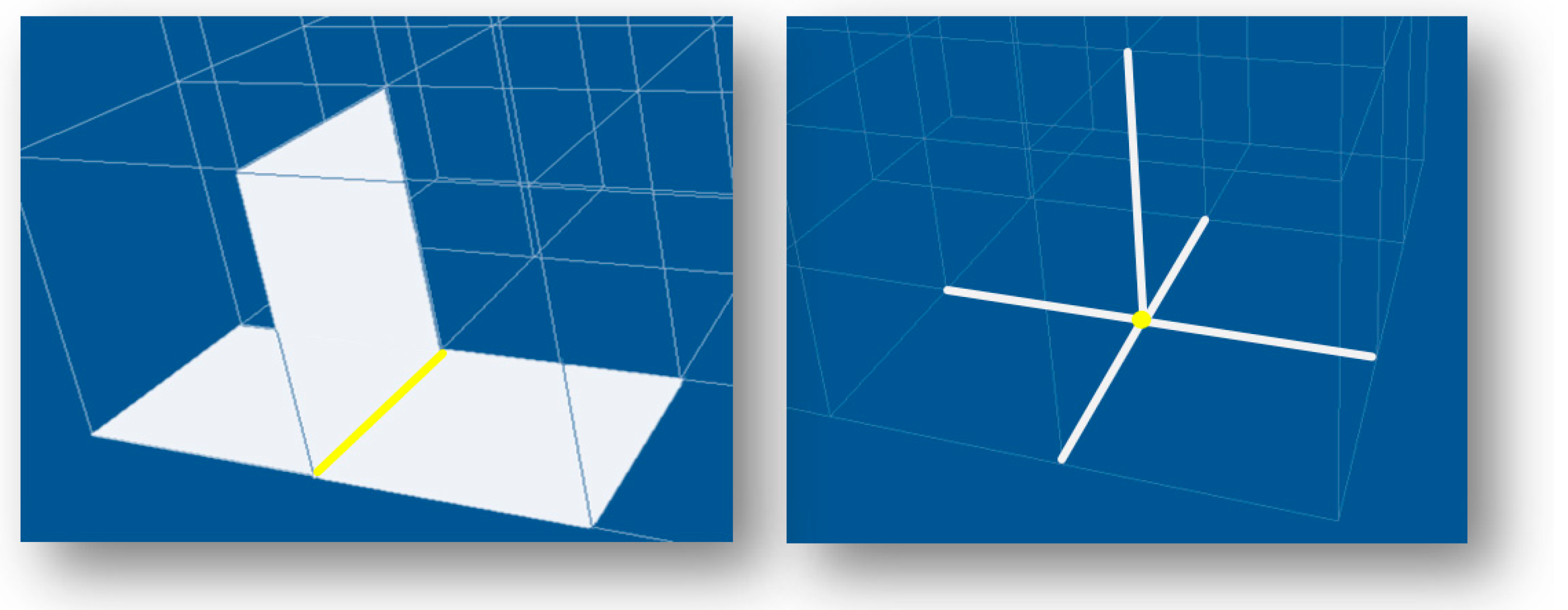
4.1.2. Common Edges and Vertices
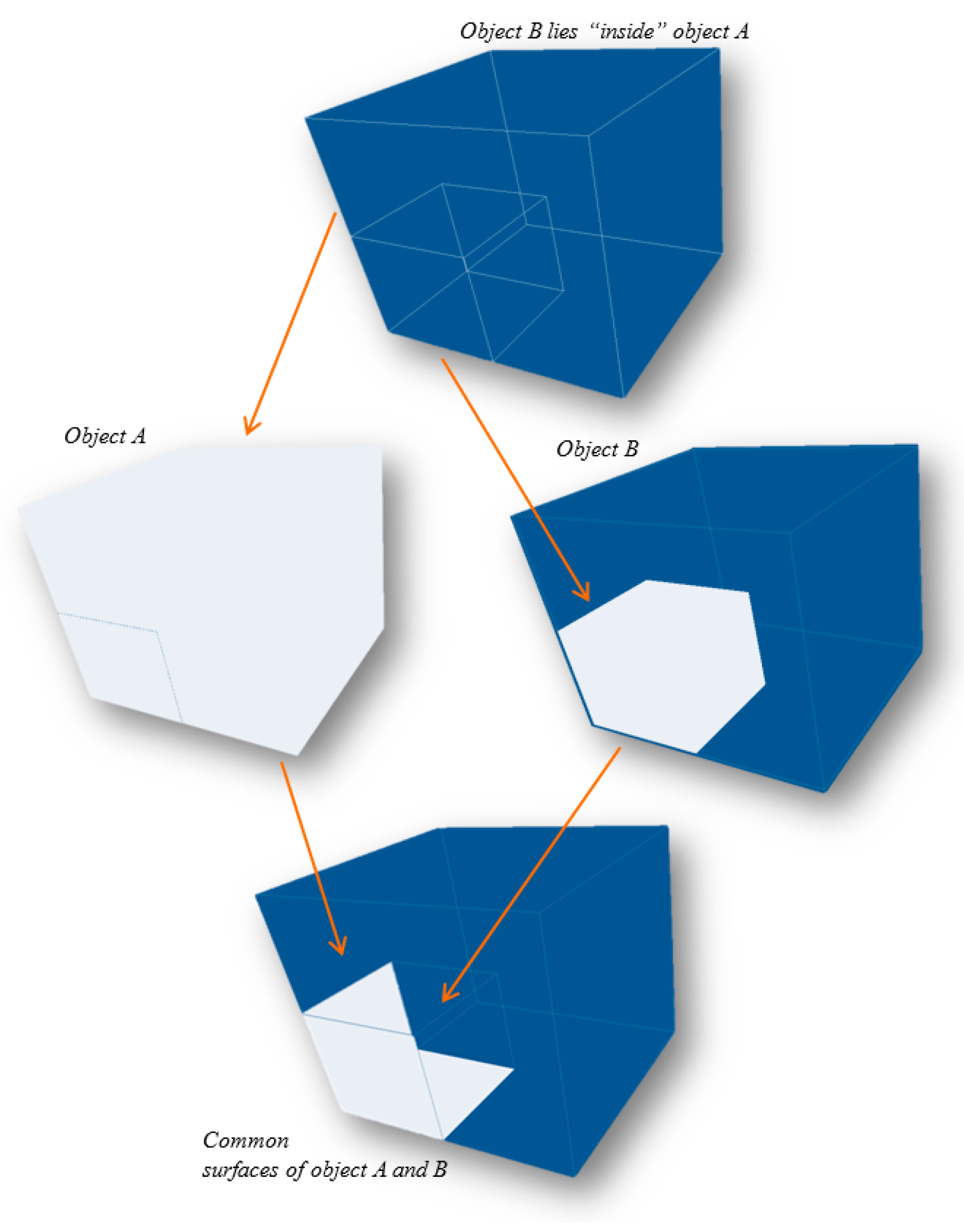
4.1.3. Containment
4.2. Storage Costs and Comparison
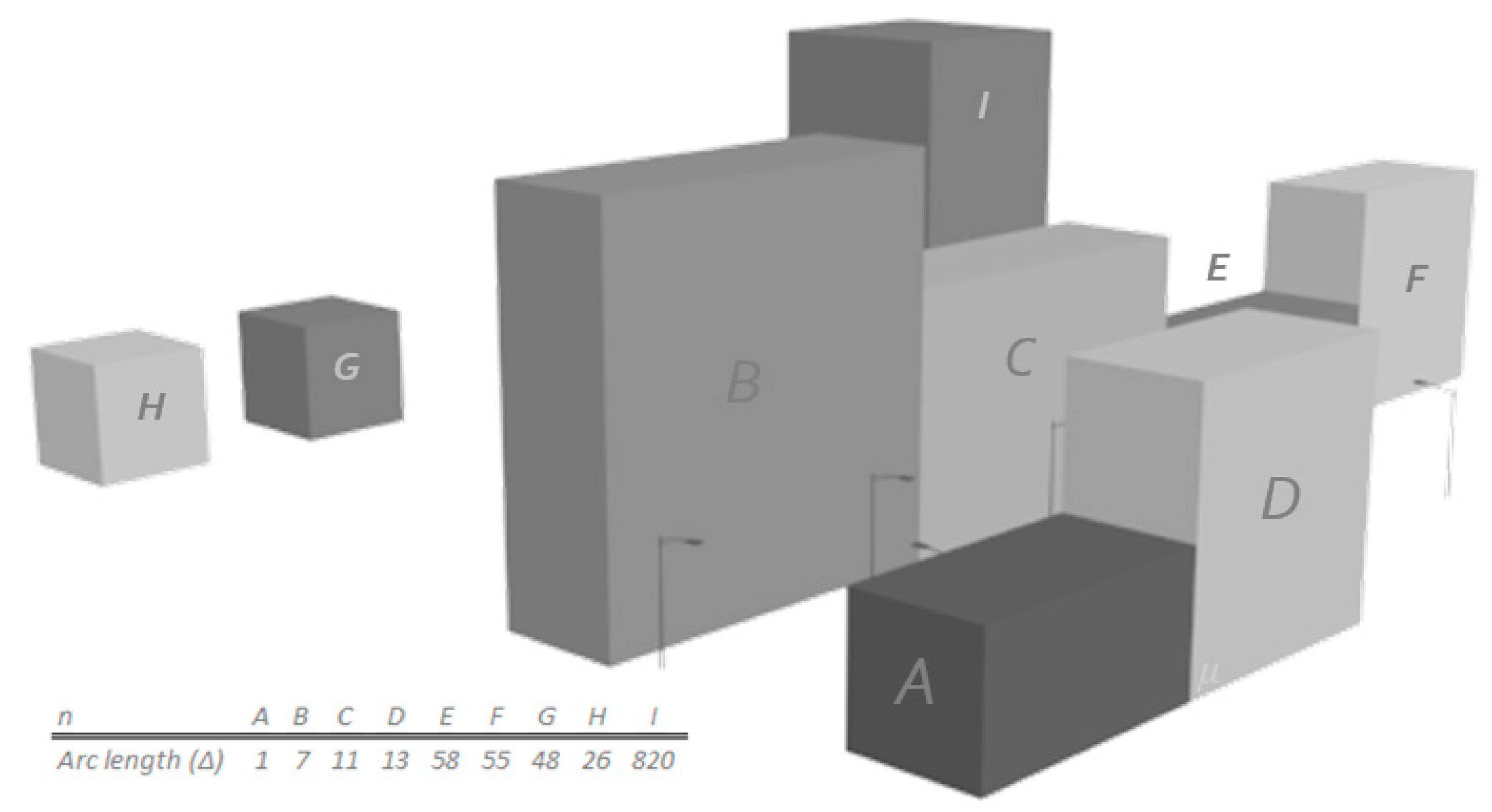
4.3. Adjacency
4.4. Traversal between Multiple Connected Components
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Harvey, A.S.; Fotopoulos, G.; Hall, B.; Amolins, K. Augmenting comprehension of geological relationships by integrating 3D laser scanned hand samples within a GIS environment. Comput. Geosci. 2017, 103, 152–163. [Google Scholar] [CrossRef]
- Huang, W.; Sun, M.; Li, S. A 3D GIS-based interactive registration mechanism for outdoor augmented reality system. Expert Syst. Appl. 2016, 55, 48–58. [Google Scholar] [CrossRef]
- Lin, F.; Chang, W.-Y.; Tsai, W.-F.; Shih, C.-C. Development of 3D Earth Visualization for Taiwan Ocean Environment Demonstration. In Proceedings of the Data Mining and Big Data: Second International Conference, DMBD 2017, Fukuoka, Japan, 27 July–1 August 2017; Tan, Y., Takagi, H., Shi, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 307–313. [Google Scholar]
- Yin, L. Street level urban design qualities for walkability: Combining 2D and 3D GIS measures. Comput. Environ. Urban Syst. 2017, 64, 288–296. [Google Scholar] [CrossRef]
- Mohd, Z.H.; Ujang, U.; Choon, T.L. Heritage House Maintenance using 3D City Model Application Domain Extension Approach. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 73–76. [Google Scholar] [CrossRef]
- Ujang, U.; Azri, S.; Zahir, M.; Abdul Rahman, A.; Choon, T. Urban Heat Island Micro-Mapping via 3D City Model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 201–207. [Google Scholar] [CrossRef]
- Feinberg, R.; Pyrek, C.C.; Mawyer, A. Navigating Spatial Relationships in Oceania. Struct. Dyn. 2016, 9, 1–7. [Google Scholar]
- Nagaraja, T.N.; Keenan, K.; Irtenkauf, S.; Hasselbach, L.; Panda, S.; Cabral, G.; Ewing, J.R.; Mikkelsen, T.; de Carvalho, A. A method to examine spatial relationships between tumor cells and vasculature using a mouse orthotopic PDX glioblastoma model. In Proceedings of the AACR 107th Annual Meeting 2016, New Orleans, LA, USA, 16–20 April 2016. [Google Scholar]
- Pérez-Gallardo, Y.; García Crespo, Á.; López Cuadrado, J.L.; González Carrasco, I. MESSRS: A model-based 3D system for of recognition, semantic annotation and calculating the spatial relationships of a factory’s digital facilities. Comput. Ind. 2016, 82, 40–56. [Google Scholar] [CrossRef]
- Tasic, I.; Porter, R.J. Modeling spatial relationships between multimodal transportation infrastructure and traffic safety outcomes in urban environments. Saf. Sci. 2016, 82, 325–337. [Google Scholar] [CrossRef]
- Waters, N. Tobler’s First Law of Geography, International Encyclopedia of Geography: People, the Earth, Environment and Technology; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Claudia, S.; Volker, C. Development of Citygml ADE for Dynamic Flood Information. In Proceedings of the 3rd International ISCRAM China Workshop, Harbin, China, 4–6 August 2008. [Google Scholar]
- Xu, Z.; Zhu, G.; Wu, X.; Yan, H. 3D Modeling of Groundwater Based on Volume, Advances in Spatio-Temporal Analysis; Taylor Francis Group: Abingdon-on-Thames, UK, 2007; pp. 163–168. [Google Scholar]
- Duncan, E.E.; Abdul Rahman, A. 3D GIS for mine development—Integrated concepts. Int. J. Min. Reclam. Environ. 2015, 29, 3–18. [Google Scholar] [CrossRef]
- Katerina, K.; Maria, K.; Aggeliki, K.; Konstantinos, G.N.; Nikolaos, S.; Nikolaos, D. 3D subsurface geological modeling using GIS, remote sensing, and boreholes data. In Proceedings of the Fourth International Conference on Remote Sensing and Geoinformation of the Environment, Paphos, Cyprus, 4–8 April 2016; SPIE: Paphos, Cyprus, 2016. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. An improved LOD specification for 3D building models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef] [Green Version]
- Geiger, A.; Benner, J.; Haefele, K.H. Generalization of 3D IFC Building Models. In 3D Geoinformation Science: The Selected Papers of the 3D GeoInfo 2014; Breunig, M., Al-Doori, M., Butwilowski, E., Kuper, P.V., Benner, J., Haefele, K.H., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 19–35. [Google Scholar]
- Ohori, A.K.; Ledoux, H.; Biljecki, F.; Stoter, J. Modeling a 3D City Model and Its Levels of Detail as a True 4D Model. ISPRS Int. J. Geo-Inf. 2015, 4, 1055–1075. [Google Scholar] [CrossRef] [Green Version]
- Janečka, K.; Váša, L. Compression of 3D Geographical Objects at Various Level of Detail. In The Rise of Big Spatial Data; Ivan, I., Singleton, A., Horák, J., Inspektor, T., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 359–372. [Google Scholar]
- Floriani, L.D.; Fellegara, R.; Magillo, P. Spatial indexing on tetrahedral meshes. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; ACM: New York, NY, USA, 2010; pp. 506–509. [Google Scholar]
- Weiss, K.; Floriani, L.D. Supercubes: A High-Level Primitive for Diamond Hierarchies. IEEE Trans. Vis. Comput. Graph. 2009, 15, 1603–1610. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bertolotto, M.; Floriani, L.D.; Marzano, P. A Unifying Framework for Multilevel Description of Spatial Data. In Proceedings of the COSIT, Semmering, Austria, 21–23 September 1995. [Google Scholar]
- Evako, A.V. Topological properties of closed digital spaces: One method of constructing digital models of closed continuous surfaces by using covers. Comput. Vis. Image Underst. 2006, 102, 134–144. [Google Scholar] [CrossRef]
- Kovalevsky, V. Multidimensional cell lists for investigating 3-manifolds. Discret. Appl. Math. 2003, 125, 25–43. [Google Scholar] [CrossRef]
- Kovalevsky, V.A. Finite Topology and Image Analysis. Adv. Electron. Electron Phys. 1992, 84, 197–259. [Google Scholar]
- Schulz, H. Polyhedral approximation and practical convex hull algorithm for certain classes of voxel sets. Discret. Appl. Math. 2009, 157, 3485–3493. [Google Scholar] [CrossRef] [Green Version]
- Webster, J. Cell complexes, oriented matroids and digital geometry. Theor. Comput. Sci. 2003, 305, 491–502. [Google Scholar] [CrossRef] [Green Version]
- Wiederhold, P.; Morales, S. Thinning on cell complexes from polygonal tilings. Discret. Appl. Math. 2009, 157, 3424–3434. [Google Scholar] [CrossRef] [Green Version]
- Fomenko, A.T. Visual Geometry and Topology; Springer Science & Business Media: Berlin, Germany, 1994. [Google Scholar]
- Klette, R. Cell complexes through time. In Proceedings of the Vision Geometry IX, International Symposium on Optical Science and Technology, San Diego, CA, USA, 30 July–4 August 2000; pp. 134–145. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. Generating 3D city models without elevation data. Comput. Environ. Urban Syst. 2017, 64, 1–18. [Google Scholar] [CrossRef]
- Chaturvedi, K.; Smyth, C.S.; Gesquière, G.; Kutzner, T.; Kolbe, T.H. Managing Versions and History Within Semantic 3D City Models for the Next Generation of CityGML. In Advances in 3D Geoinformation; Abdul-Rahman, A., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 191–206. [Google Scholar]
- Nouvel, R.; Zirak, M.; Coors, V.; Eicker, U. The influence of data quality on urban heating demand modeling using 3D city models. Comput. Environ. Urban Syst. 2017, 64, 68–80. [Google Scholar] [CrossRef]
- Martinez-Rubi, O.; de Kleijn, M.; Verhoeven, S.; Drost, N.; Attema, J.; van Meersbergen, M.; van Nieuwpoort, R.; de Hond, R.; Dias, E.; Svetachov, P. Using modular 3D digital earth applications based on point clouds for the study of complex sites. Int. J. Digit. Earth 2016, 9, 1135–1152. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Wessel, R.; Klein, R. Automatic reconstruction of parametric building models from indoor point clouds. Comput. Graph. 2016, 54, 94–103. [Google Scholar] [CrossRef] [Green Version]
- Psomadaki, S.; Van Oosterom, P.; Tijssen, T.; Baart, F. Using a Space Filling Curve Approach for the Management of Dynamic Point Clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 4, 107–118. [Google Scholar] [CrossRef]
- Gerhard, G.; Thomas, H.K.; Angela, C.; Claus, N. OpenGIS City Geography Markup Language (CityGML) Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2008. [Google Scholar]
- Yamaguchi, Y.; Kimura, F. Nonmanifold topology based on coupling entities. IEEE Comput. Graph. Appl. 1995, 15, 42–50. [Google Scholar] [CrossRef]
- Weiler, K. The radial edge structure: A topological representation for nonmanifold geometric boundary modeling. Geom. Model. CAD Appl. 1988, 1, 3–36. [Google Scholar]
- Lee, S.H.; Lee, K. Partial entity structure: A compact non-manifold boundary representation based on partial topological entities. In Proceedings of the Sixth ACM Symposium on Solid Modeling and Applications, Ann Arbor, MI, USA, 4–8 June 2001; ACM: New York, NY, USA, 2001; pp. 159–170. [Google Scholar]
- Brisson, E. Representing geometric structures in d dimensions: Topology and order. In Proceedings of the Fifth Annual Symposium on Computational Geometry, Saarbruchen, Germany, 5–7 June 1989; ACM: New York, NY, USA, 1989; pp. 218–227. [Google Scholar]
- Edelsbrunner, H. Algorithms in Combinatorial Geometry. In Monographs on Theoretical Computer Science; Brauer, W., Rozenberg, G., Salomaa, A., Eds.; Springer: Berlin/Heidelberg, Germany, 1987. [Google Scholar]
- Ledoux, H.; Gold, C.M. Simultaneous storage of primal and dual three-dimensional subdivisions. Comput. Environ. Urban Syst. 2007, 31, 393–408. [Google Scholar] [CrossRef] [Green Version]
- Lienhardt, P. Topological models for boundary representation: A comparison with n-dimensional generalized maps. Comput.-Aided Des. 1991, 23, 59–82. [Google Scholar] [CrossRef]
- Boguslawski, P. Modelling and Analysing 3D Building Interiors with the Dual Half-Edge Data Structure. Ph.D. Thesis, University of Glamorgan, Pontypridd, UK, 2011. [Google Scholar]
- Kremer, M.; Bommes, D.; Kobbelt, L. OpenVolumeMesh—A Versatile Index-Based Data Structure for 3D Polytopal Complexes. In Proceedings of the 21st International Meshing Roundtable, San Jose, CA, USA, 7–10 October 2012; Jiao, X., Weill, J.-C., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 531–548. [Google Scholar]
- Čomić, L.; Floriani, L. Modeling and Manipulating Cell Complexes in Two, Three and Higher Dimensions. In Digital Geometry Algorithms; Brimkov, V.E., Barneva, R.P., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 109–144. [Google Scholar]
- Cardoze, D.; Miller, G.; Phillips, T. Representing Topological Structures Using Cell-Chains. In Proceedings of the Geometric Modeling and Processing—GMP 2006, Pittsburgh, PA, USA, 26–28 July 2006; Kim, M.-S., Shimada, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 248–266. [Google Scholar]
- Fradin, D.; Meneveaux, D.; Lienhardt, P. Sample Space and Hierarchy of Generalized Maps: Application to Architectural Complexes; AFIG—French Association of Computer Graphics: Lyon, France, 2002; pp. 199–210. [Google Scholar]
- Silva, F.G.M.; Gomes, A.J.P. Adjacency and incidence framework: A data structure for efficient and fast management of multiresolution meshes. In Proceedings of the 1st International Conference on Computer Graphics and Interactive Techniques in Australasia and South East Asia, Melbourne, Australia, 11–14 February 2003; ACM: New York, NY, USA, 2003; pp. 159–166. [Google Scholar]
- Kunihiko, K.; Akifumi, M. Binary spatial operations on cell complex using incidence graph implemented at a spatial database system Hawk Eye. Prog. Inform. 2006, 3, 19–30. [Google Scholar]
- Guibas, L.; Stolfi, J. Primitives for the manipulation of general subdivisions and the computation of Voronoi. ACM Trans. Graph. 1985, 4, 74–123. [Google Scholar] [CrossRef]
- Horna, S.; Meneveaux, D.; Damiand, G.; Bertrand, Y. Consistency constraints and 3D building reconstruction. Comput.-Aided Des. 2009, 41, 13–27. [Google Scholar] [CrossRef] [Green Version]
- Ellul, C.; Haklay, M. Requirements for Topology in 3D GIS. Trans. GIS 2006, 10, 157–175. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
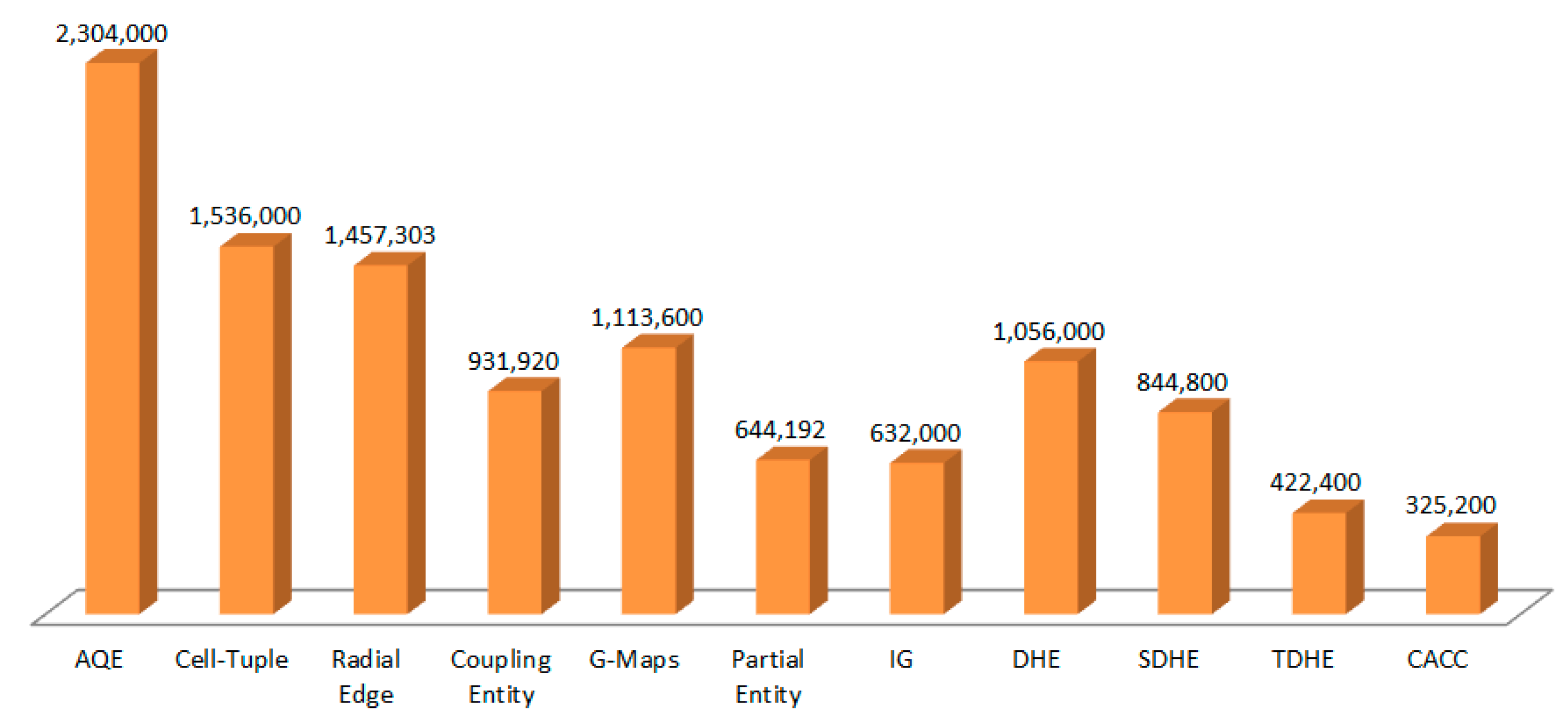
| Data Structure | Total Size | Ratio (x/AQE) | Ratio (x/SDHE) |
|---|---|---|---|
| AQE | 2,304,000 | 100% | 273% |
| Cell-Tuple | 1,536,000 | 67% | 182% |
| Radial Edge | 1,457,303 | 63% | 173% |
| Coupling Entity | 931,920 | 40% | 110% |
| G-Maps | 1,113,600 | 48% | 132% |
| Partial Entity | 644,192 | 28% | 76% |
| IG | 632,000 | 27% | 75% |
| DHE | 1,056,000 | 46% | 125% |
| SDHE | 844,800 | 37% | 100% |
| TDHE | 422,400 | 18% | 50% |
| CACC | 325,200 | 14% | 38% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ujang, U.; Anton Castro, F.; Azri, S. Abstract Topological Data Structure for 3D Spatial Objects. ISPRS Int. J. Geo-Inf. 2019, 8, 102. https://doi.org/10.3390/ijgi8030102
Ujang U, Anton Castro F, Azri S. Abstract Topological Data Structure for 3D Spatial Objects. ISPRS International Journal of Geo-Information. 2019; 8(3):102. https://doi.org/10.3390/ijgi8030102
Chicago/Turabian StyleUjang, Uznir, Francesc Anton Castro, and Suhaibah Azri. 2019. "Abstract Topological Data Structure for 3D Spatial Objects" ISPRS International Journal of Geo-Information 8, no. 3: 102. https://doi.org/10.3390/ijgi8030102
APA StyleUjang, U., Anton Castro, F., & Azri, S. (2019). Abstract Topological Data Structure for 3D Spatial Objects. ISPRS International Journal of Geo-Information, 8(3), 102. https://doi.org/10.3390/ijgi8030102