Dynamic Wildfire Navigation System



Abstract
:1. Introduction
2. Study Area and System Architecture
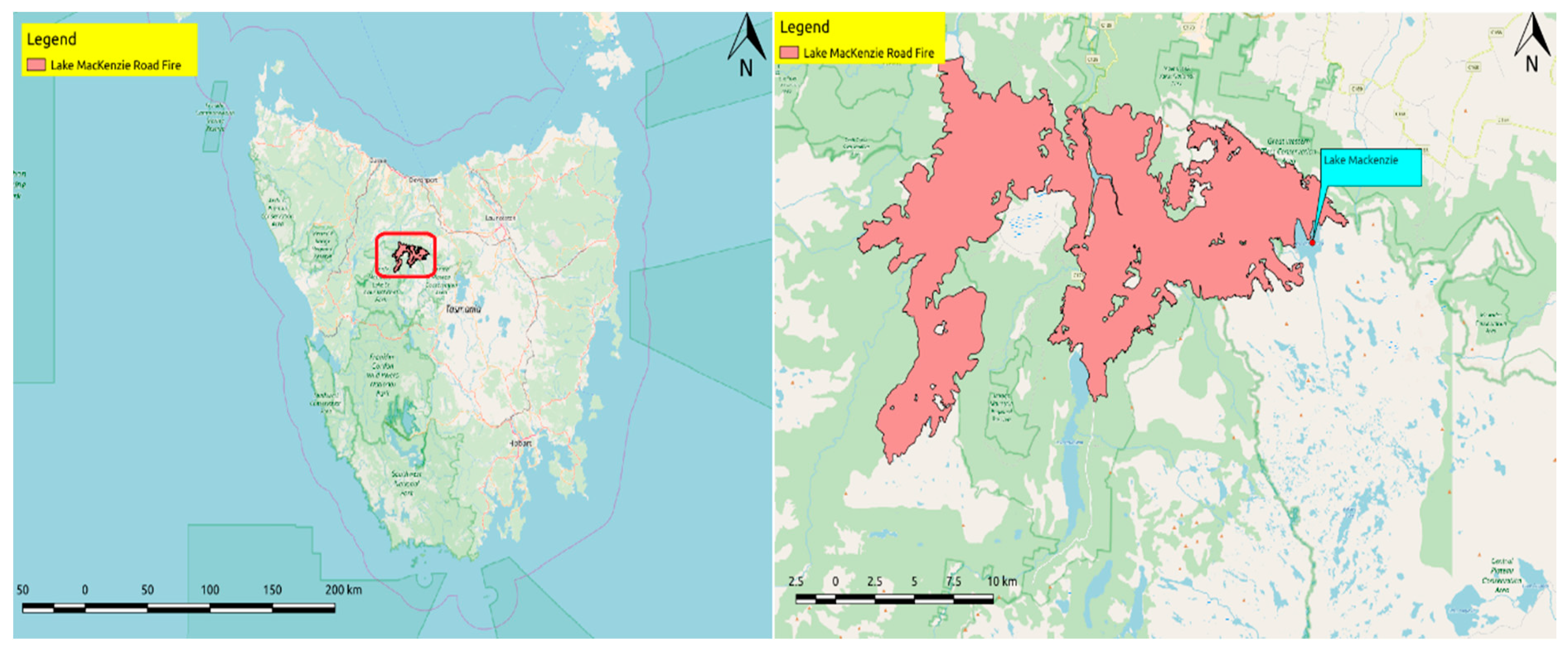
2.1. Study Area
2.2. System Specifications
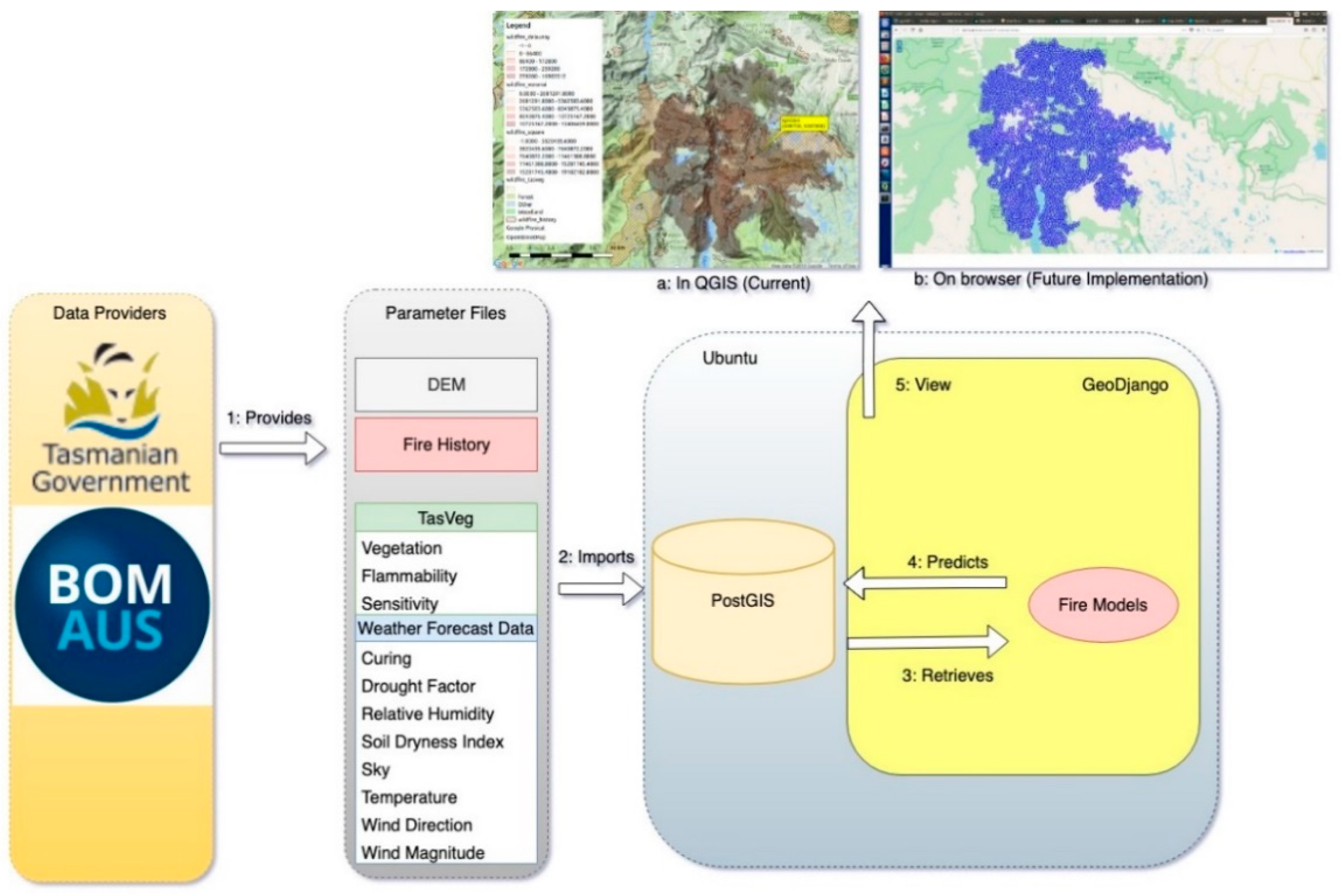
2.3. System Architecture
3. Methodology
3.1. Fire Danger Indinces (FDIs)
3.1.1. Identification of FDI among Vegetation Groups
3.1.2. Fuel Load
3.1.3. Other FDI Configurations
3.2. Prediction of Fire Propagation
3.2.1. Status of Fire
3.2.2. Data Table for Prediction
3.2.3. Prediction of Fire
3.3. Verification, Validation and Acceptability of Model
3.3.1. Confusion Matrix
3.3.2. Other Common Criteria for Data Quality
4. Results
4.1. Expected Result
4.2. Actual Result
4.2.1. General Tendency
4.2.2. Result with Confusion Matrix
4.2.3. Verification with Other Common Criteria
5. Discussion
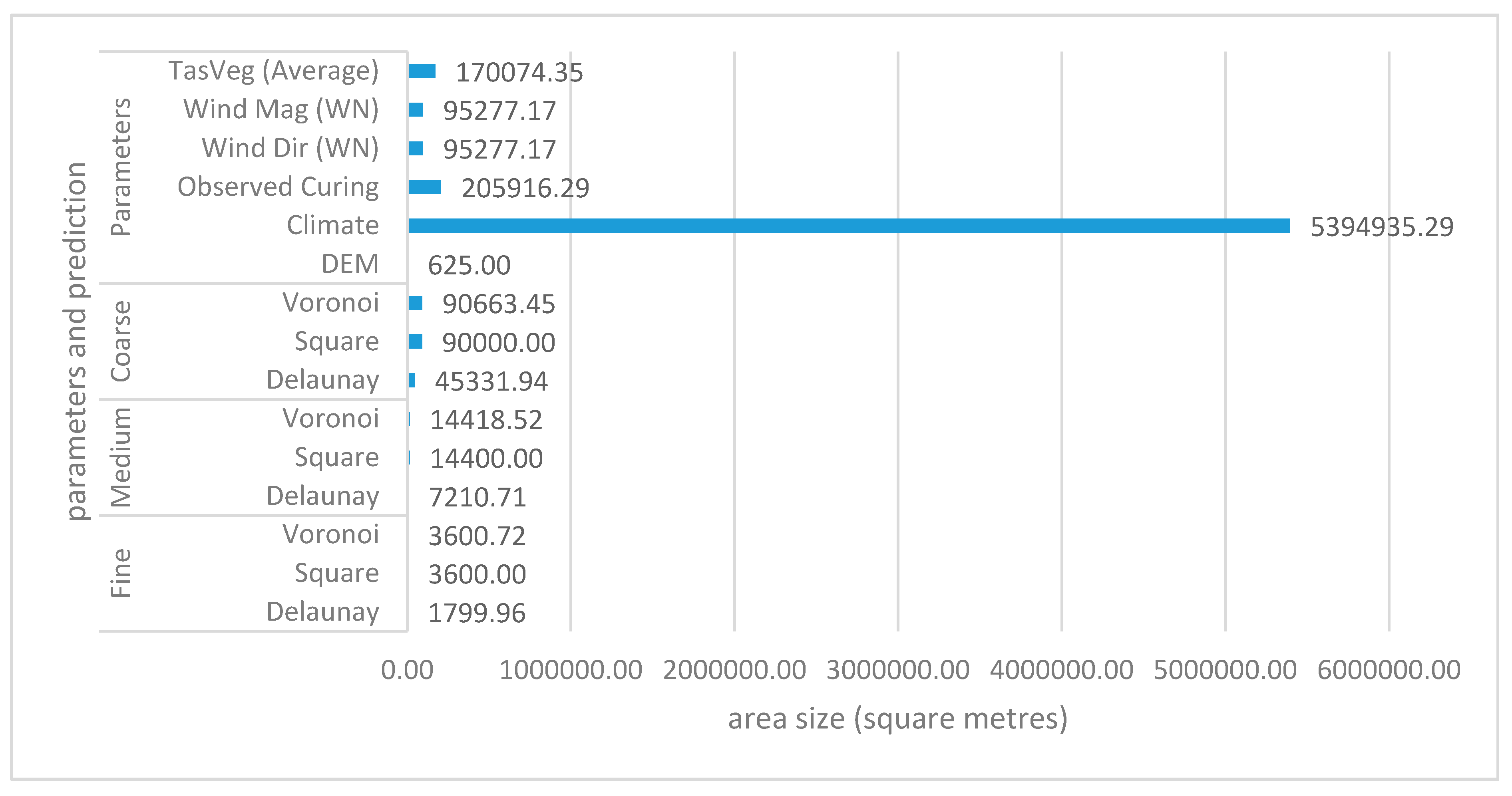
5.1. Geometric Data and Their Impact on the Prototype
5.1.1. Polygon and Elapse
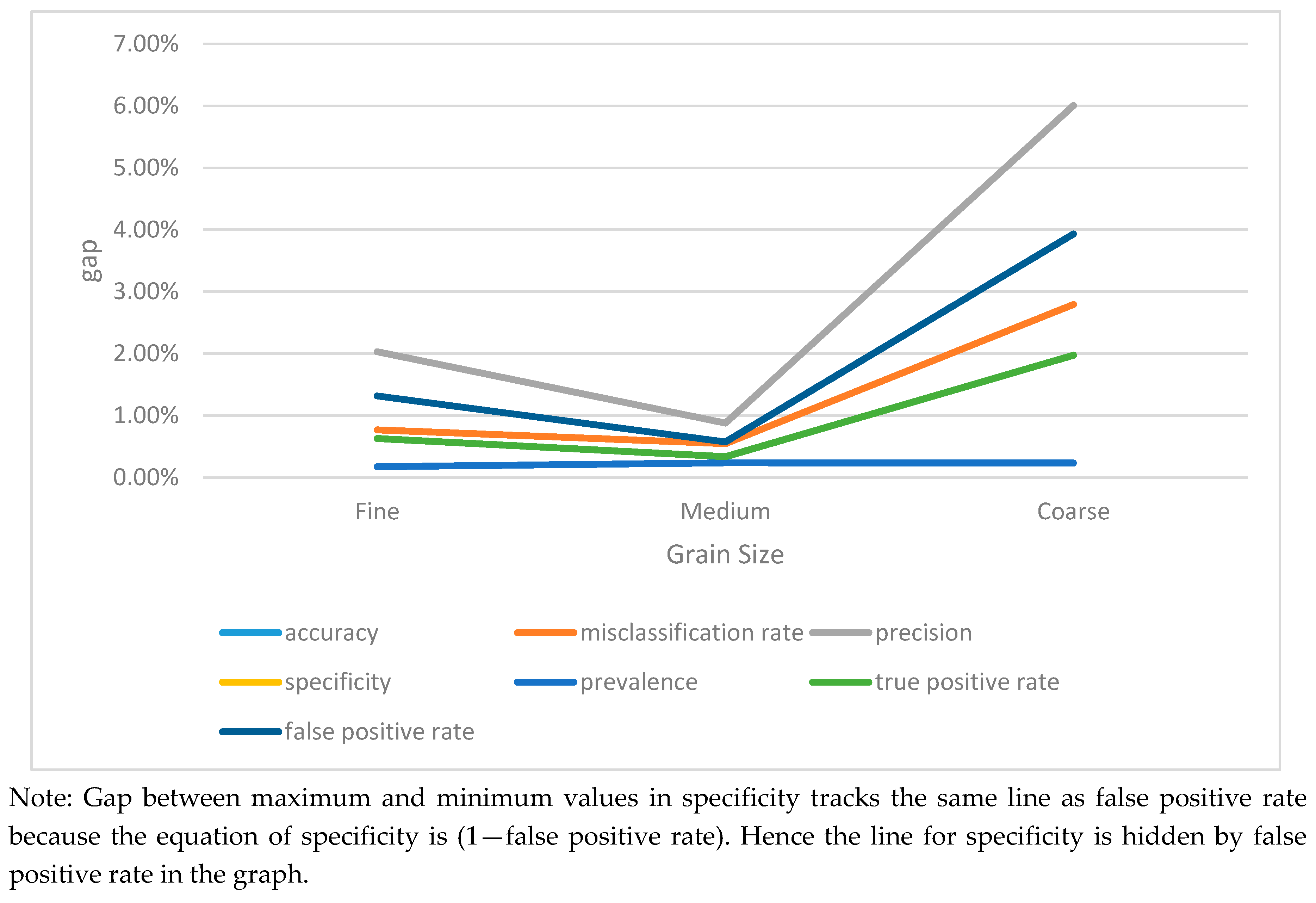
5.1.2. Polygon Size, Accuracy and Precision
5.2. Spatial Data and Their Impact on the Prototype
5.3. Recommendation
6. Limitations
7. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Acknowledgments
- Data
- ○
- Department of Primary Industries, Parks, Water and Environment (DPIPWE) through ListMap.
- ▪
- Digital Elevation Model (DEM)
- ▪
- TasVeg 3.0
- ○
- BoM
- ▪
- Forecast weather grid, such as Curing, Soil Dryness Index (SDI), Drought Factor (DF), Relative Humidity (RH), Temperature, Wind Direction and Wind Magnitude
- Software
- ○
- Canonical Ltd.
- ▪
- Ubuntu 16.04 LTS
- ○
- The PostgreSQL Global Development Group
- ▪
- PostgreSQL 10.0
- ○
- Django Software Foundation
- ▪
- GeoDjango 2.0
- ○
- QGIS Community
- ▪
- Quantum GIS software (QGIS) 2.18/3.2.2
- ○
- U.S. Forest Service
- ▪
- WindNinja 3.3.0
Conflicts of Interest
References
- Mass, C.F.; Ovens, D. The Northern California Wildfires of October 8-9, 2017: The Role of a Major Downslope Wind Event. Bull. Am. Meteorol. Soc. 2018. [Google Scholar] [CrossRef]
- BBC Portugal Forest Fires Kill 62 Near Coimbra. Available online: http://www.bbc.com/news/world-europe-40316934 (accessed on 1 January 2018).
- Cruz, M.G.; Sullivan, A.L.; Gould, J.S.; Sims, N.C.; Bannister, A.J.; Hollis, J.J.; Hurley, R.J. Anatomy of a catastrophic wildfire: The Black Saturday Kilmore East fire in Victoria, Australia. For. Ecol. Manag. 2012, 284, 269–285. [Google Scholar] [CrossRef]
- Mills, G.A. A re-examination of the synoptic and mesoscale meteorology of Ash Wednesday 1983. Aust. Meteorol. Mag. 2005, 54, 35–55. [Google Scholar]
- Fox-Hughes, P. A fire danger climatology for Tasmania. Aust. Meteorol. Mag. 2008, 57, 109–120. [Google Scholar]
- Garg, S.; Aryal, J.; Wang, H.; Shah, T.; Kecskemeti, G.; Ranjan, R. Cloud computing based bushfire prediction for cyber-physical emergency applications. Future Gener. Comput. Syst. 2018, 79, 354–363. [Google Scholar] [CrossRef]
- Cruz, M.G.; Alexander, M.E.; Sullivan, A.L.; Gould, J.S.; Kilinc, M. Assessing improvements in models used to operationally predict wildland fire rate of spread. Environ. Model. Softw. 2018, 105, 54–63. [Google Scholar] [CrossRef]
- Tolhurst, K.; Shields, B.; Chong, D. Phoenix: Development and application of a bushfire risk management tool. Aust. J. Emerg. Manag. 2008, 23, 47. [Google Scholar]
- Driessen, M. Buttongrass moorland fauna. Australas. Plant Conserv. 2007, 16, 20. [Google Scholar]
- Marsden-Smedley, J.B.; Catchpole, W.R. Fire behaviour modelling in tasmanian buttongrass moorlands i. Fuel characteristics. Int. J. Wildland Fire 1995, 5, 203–214. [Google Scholar] [CrossRef]
- Crawl, D.; Block, J.; Lin, K.; Altintas, I. Firemap: A Dynamic Data-Driven Predictive Wildfire Modeling and Visualization Environment. Procedia Comput. Sci. 2017, 108, 2230–2239. [Google Scholar] [CrossRef]
- Django Software Foundation Geodjango. Available online: https://docs.djangoproject.com/en/1.11/ref/contrib/gis/ (accessed on 13 August 2017).
- Green, D.G.; Tridgell, A.; Gill, A.M. Interactive simulation of bushfires in heterogeneous fuels. Math. Comput. Model. 1990, 13, 57–66. [Google Scholar] [CrossRef]
- Sullivan, A.L.; Knight, I.K. A hybrid cellular automata/semi-physical model of fire growth. Complex. Int. 2008, 12, 1–10. [Google Scholar]
- Johnston, P.; Kelso, J.; Milne, G.J. Efficient simulation of wildfire spread on an irregular grid. Int. J. Wildland Fire 2008, 17, 614–627. [Google Scholar] [CrossRef]
- Sharples, J.J.; McRae, R.H.D.; Weber, R.O. Wind characteristics over complex terrain with implications for bushfire risk management. Environ. Model. Softw. 2010, 25, 1099–1120. [Google Scholar] [CrossRef]
- Forthofer, J.M. Modeling Wind in Complex Terrain for Use in Fire Spread Prediction. Ph.D. Thesis, Colorado State University, Fort Collins, CO, USA, 2007. [Google Scholar]
- Forthofer, J.; Shannon, K.; Butler, B. Simulating diurnally driven slope winds with WindNinja. In Proceedings of the 8th Symposium on Fire and Forest Meteorology, Kalispell, MT, USA, 13–15 October 2009; p. 13. [Google Scholar]
- Miller, C.; Hilton, J.; Sullivan, A.; Prakash, M. SPARK—A Bushfire Spread Prediction Tool. Environ. Softw. Syst. Infrastruct. Serv. Appl. 2015, 448, 262–271. [Google Scholar]
- Hilton, J.; Hetherton, L.; Miller, C.; Sullivan, A.; Prakash, M. The Spark Framework; Technical Report, Report Number: EP152898; CSIRO: Clayton, Australia, 2015. [Google Scholar]
- Spark team Wildfire Simulation Toolkit. Available online: https://research.csiro.au/spark (accessed on 5 March 2019).
- Land Information System Tasmania LISTMap. Available online: http://maps.thelist.tas.gov.au/listmap/app/list/map (accessed on 17 April 2017).
- Pyrke, A.; Marsden-Smedley, J. Fire-attributes categories, fire sensitivity, and flammability of Tasmanian vegetation communities. Tasforests 2005, 16, 35–46. [Google Scholar]
- Canonical Ltd. Ubuntu 16.04.3 LTS (Xenial Xerus). Available online: http://releases.ubuntu.com/16.04/ (accessed on 19 January 2018).
- Project Steering Committee PostGIS. Available online: http://postgis.net/ (accessed on 13 August 2017).
- The PostgreSQL Global Development Group PostgreSQL. Available online: https://www.postgresql.org/ (accessed on 29 June 2018).
- QGIS. Available online: https://qgis.org/en/site/ (accessed on 29 April 2018).
- Department of Premier and Cabinet. Tasmanian Bushfires Inquiry; Department of Premier and Cabinet, Tasmanian Government: Hobart, Tasmania, 2013.
- Noble, I.R.; Gill, A.M.; Bary, G.A. V McArthur’s fire-danger meters expressed as equations. Aust. J. Ecol. 1980, 5, 201–203. [Google Scholar] [CrossRef]
- Cruz, M.G.; Gould, J.S.; Alexander, M.E.; Sullivan, A.L.; McCaw, W.L.; Matthews, S. A Guide to Rate of Fire Spread Models for Australian Vegetation; Australasian Fire and Emergency Service Authorities Council Limited and Commonwealth Scientific and Industrial Research Organization: Clayton, Australia, 2015. [Google Scholar]
- Fox-Hughes, P. A Meteorological Investigation of the “Springtime Bump” An Early Season Peak in the Fire Danger Experienced in Tasmania. Ph.D. Thesis, University of Tasmania, Tasmania, Australia, 2014. [Google Scholar]
- Marsden-Smedley, J.B.; Catchpole, W.R. Fire Behaviour Modelling in Tasmanian Buttongrass Moorlands II. Fire Behaviour. Int. J. Wildland Fire 1995, 5, 215–228. [Google Scholar] [CrossRef]
- McArthur, A. Fire Behaviour in Eucalypt Forests: Forestry and Timber Bureau Leaflet 107; Forestry and Timber Bureau: Canberra, Australia, 1967.
- Boldstad, P. GIS Funfamentals, A First Text on Geographic Information Systems; Eider Press: White Bear Lake, MN, USA, 2012; ISBN 978-0-9717647-3-6. [Google Scholar]
- Burrough, P.A.; McDonnell, R.A.; McDonnell, R.; Lloyd, C.D. Principles of Geographical Information Systems; Oxford University Press: Oxford, UK, 2015. [Google Scholar]
- Chin, F.; Wang, C. Finding the constrained Delaunay triangulation and constrained Voronoi diagram of a simple polygon in linear time. SIAM J. Comput. 1998, 28, 471–486. [Google Scholar] [CrossRef]
- DeMers, M.N. GIS Modeling in Raster; John Wiley Sons: New York, NY, USA, 2002; ISBN 0471319651. [Google Scholar]
- Deng, X.; Liu, Q.; Deng, Y.; Mahadevan, S. An improved method to construct basic probability assignment based on the confusion matrix for classification problem. Inf. Sci. 2016, 340–341, 250–261. [Google Scholar] [CrossRef]
- Markham, K. Simple Guide to Confusion Matrix Terminology. Available online: http://www.dataschool.io/simple-guide-to-confusion-matrix-terminology/ (accessed on 8 April 2018).
- Ruuska, S.; Hämäläinen, W.; Kajava, S.; Mughal, M.; Matilainen, P.; Mononen, J. Evaluation of the confusion matrix method in the validation of an automated system for measuring feeding behaviour of cattle. Behav. Process. 2018, 148, 56–62. [Google Scholar] [CrossRef]
- Beccari, A.; Borgoni, R.; Cazzuli, O.; Grimaldelli, R. Use and performance of the Forest Fire Weather Index to model the risk of wildfire occurrence in the Alpine region. Environ. Plan. B Urban Anal. City Sci. 2016, 43, 772–790. [Google Scholar] [CrossRef]
- Heywood, D.I.; Cornelius, S.; Carver, S. An Introduction to Geographical Information Systems, 4th ed.; Prentice Hall: Harlow, UK, 2011; ISBN1 9780273722595. ISBN2 027372259X. [Google Scholar]
- TasVeg-Open Data. Available online: http://listdata.thelist.tas.gov.au/tasveg/ (accessed on 29 April 2018).
- Fire History. Available online: https://www.thelist.tas.gov.au/app/content/data/geo-meta-data-record?profileType=&groupName=&bboxNorth=&bboxWest=&bboxSouth=&bboxEast=&query=fire&_keywordCategory=-1&isTasmania=true&custodian=&detailRecordUID=b94d4388-995d-416a-9844-a39de2798bed&searchCri (accessed on 29 April 2018).
- Centre for Australian Weather and Climate Research—List of THREDDS catalogs. Available online: http://opendap.bom.gov.au:8080/thredds/catalog/curing_modis_500m_8-day/aust_regions/nsw/tiff/mapvictoria/catalog.html (accessed on 29 April 2018).
- Viegas, D.X. Slope and wind effects on fire propagation. Int. J. Wildland Fire 2004, 13, 143–156. [Google Scholar] [CrossRef]
- King, K.J.; Cary, G.J.; Bradstock, R.A.; Chapman, J.; Pyrke, A.; Marsden-Smedley, J.B. Simulation of prescribed burning strategies in south-west Tasmania, Australia: Effects on unplanned fires, fire regimes, and ecological management values. Int. J. Wildland Fire 2006, 15, 527–540. [Google Scholar] [CrossRef]
- Birch, C.P.; Oom, S.P.; Beecham, J.A. Rectangular and hexagonal grids used for observation, experiment and simulation in ecology. Ecol. Model. 2007, 206, 347–359. [Google Scholar] [CrossRef]
- Cova, T.J.; Dennison, P.E.; Kim, T.H.; Moritz, M.A. Setting wildfire evacuation trigger points using fire spread modeling and GIS. Trans. GIS 2005, 9, 603–617. [Google Scholar] [CrossRef]
- Rui, X.; Hui, S.; Yu, X.; Zhang, G.; Wu, B. Forest fire spread simulation algorithm based on cellular automata. Nat. Hazards 2018, 91, 309–319. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Software/System | Version |
|---|---|---|
| Operating System | Ubuntu | 16.04 LTS |
| Programming Language | Python | 3.5 |
| Python framework | GeoDjango | 2.0 |
| Database Management System | PostgreSQL | 10.0 |
| Spatial Database Extension | PostGIS | 2.4.2 |
| Software | WindNinja | 3.3.0 |
| Software | QGIS | 2.18/3.2.2 |
| Vegetation Community | Default FDI |
|---|---|
| Saltmarsh and wetland | GFDI |
| Scrub, heathland and coastal complexes | GFDI |
| Highland treeless vegetation | GFDI |
| Rainforest and related scrub | FFDI |
| Dry eucalypt forest and woodland | FFDI |
| Wet eucalypt forest and woodland | FFDI |
| Non-eucalypt forest and woodland | FFDI |
| Moorland, sedgeland, rushland and peatland | BGML |
| Agricultural, urban and exotic vegetation | GFDI |
| Native grassland | GFDI |
| Other natural environments | GFDI |
| Vegetation Community | Default Fuel Load |
|---|---|
| Saltmarsh and wetland | 1.5 |
| Scrub, heathland and coastal complexes | 1.5 |
| Highland treeless vegetation | 1.5 |
| Rainforest and related scrub | 7.0 |
| Dry eucalypt forest and woodland | 14.0 |
| Wet eucalypt forest and woodland | 14.0 |
| Non-eucalypt forest and woodland | 14.0 |
| Moorland, sedgeland, rushland and peatland | 3.0 |
| Agricultural, urban and exotic vegetation | 1.5 |
| Native grassland | 1.5 |
| Other natural environments | 0.0 |
| Flammability | Default Weight |
|---|---|
| VH | 2.0 |
| H | 1.5 |
| M | 1.0 |
| L | 0.5 |
| N | 0 |
| Value | Description |
|---|---|
| None | The grid has not been estimated yet. |
| −1 | The grid has already been estimated as a non-flammable area. |
| ≥0 | The grid has been estimated as flammable and the value indicates how many seconds the fire is estimated to take in order to reach to this grid from the ignition point. |
| Value | Description |
|---|---|
| NY | Not yet. The grid has not been estimated yet. |
| WIP | Work in progress. The grid is tentatively being estimated as the fire progresses. However not all of its neighbors have been estimated yet, therefore the elapse of this grid can be replaced with a smaller value derived from its neighbors. |
| DN | Done. Both grid and adjacent grids have been estimated. |
| Resolution | Grid Type | Description | Total Number of Grids |
|---|---|---|---|
| fine | Regular | Area size is 60 . | Square: 300,000 |
| Irregular | The number of random points is 300,000 in which minimum distance is 45 m | Delaunay: 600,000 Voronoi: 300,000 | |
| medium | Regular | Area size is 120 | Square: 75,000 |
| Irregular | The number of random points is 75,000 in which minimum distance is 90 m | Delaunay: 149,971 Voronoi: 75,000 | |
| coarse | Regular | Area size is 300 | Sare: 12,000 |
| Irregular | The number of random points is 12,000 in which minimum distance is 225 m | Delaunay: 23,973 Voronoi: 12,000 |
| Configuration Key | Description | Default Value | Note |
|---|---|---|---|
| ignition | Starting place and time to predict | ‘x’: 439,700, ‘y’: 5,387,000, ‘t’: “2016-01-19 06:00:00.000000+1100” | |
| maxSeconds | How many seconds to execute prediction | (60 × 60 × 24) | seconds |
| maxAreaRatio | How much ratio of area to execute prediction | (1.0) | 0.0 to 0.1 |
| WILDFIRE_ESTIMATE_CONCURRENT | Concurrent process for neighbor estimation | True | |
| WILDFIRE_ESTIMATE_DIRECTDB | Stored procedure can be used to retrieve raster data | True |
| Term | Description |
|---|---|
| Verification | Evaluation of the discrepancy between the expectation and actual result |
| Validation | Evaluation of the gap between actual result and real-world |
| Acceptability | Decision-making of acceptability of verification and validation |
| Polygon | Grain Size | Shared Area with Actual (%) | Shared Area with Actual () |
|---|---|---|---|
| Delaunay | fine | 46.30 | 114.40 |
| medium | 46.16 | 114.06 | |
| coarse | 52.67 | 130.16 | |
| Square | fine | 46.59 | 115.13 |
| medium | 48.17 | 119.03 | |
| coarse | 47.35 | 117.00 | |
| Voronoi | fine | 43.05 | 106.37 |
| medium | 48.35 | 119.47 | |
| coarse | 46.63 | 115.23 |
| Fine | Medium | Coarse | |||||||
|---|---|---|---|---|---|---|---|---|---|
| D | S | V | D | S | V | D | S | V | |
| True Negative | 201,055 | 101,446 | 101,610 | 50,591 | 25,152 | 25,455 | 8383 | 4013 | 4204 |
| False Positive | 8856 | 3034 | 3386 | 1983 | 968 | 841 | 44 | 187 | 24 |
| False Negative | 261,617 | 129,911 | 129,760 | 65,110 | 32,687 | 32,406 | 10,139 | 5241 | 5069 |
| True Positive | 128,432 | 65,609 | 65,244 | 32,287 | 16,193 | 16,298 | 5407 | 2559 | 2703 |
| Total | 599,960 | 300,000 | 300,000 | 149,971 | 75,000 | 75,000 | 23,973 | 12,000 | 12,000 |
| Accuracy (%) | 54.92 | 55.69 | 55.62 | 55.26 | 55.13 | 55.67 | 57.52 | 54.77 | 57.56 |
| Misclassification Rate (%) | 45.08 | 44.32 | 44.38 | 44.74 | 44.87 | 44.33 | 42.48 | 45.23 | 42.44 |
| Precision (%) | 93.55 | 95.58 | 95.07 | 94.21 | 94.36 | 95.09 | 99.19 | 93.19 | 99.12 |
| Specificity (%) | 95.78 | 97.10 | 96.78 | 96.23 | 96.29 | 96.80 | 99.48 | 95.55 | 99.43 |
| Prevalence (%) | 65.01 | 65.17 | 65.00 | 64.94 | 65.17 | 64.94 | 64.85 | 65.00 | 64.77 |
| True Positive Rate (%) | 32.93 | 33.56 | 33.46 | 33.15 | 33.13 | 33.46 | 34.78 | 32.81 | 34.78 |
| False Positive Rate (%) | 4.22 | 2.90 | 3.22 | 3.77 | 3.71 | 3.20 | 0.52 | 4.45 | 0.57 |
| Dataset | Last Modified |
|---|---|
| History | 07-09-2017 |
| TasVeg 3.0 | 11-11-2013 |
| DEM | 17-11-2017 |
| Forecast weather | |
| CuringRF | 26-01-2016 |
| Grain Size | Polygon | Execution Seconds | Execution Time (hh:mm:ss) | Elapse Seconds | Elapse (dd, hh: mm:ss) | Cost-Effectiveness (%) |
|---|---|---|---|---|---|---|
| fine | Delaunay | 99,176 | 27:32:56 | 958,402 | 11, 2:13:22 | 10.35% |
| Square | 126,368 | 35:06:08 | 1,394,746 | 16, 3:25:46 | 9.06% | |
| Voronoi | 383,774 | 106:36:14 | 1,682,749 | 19, 11:25:49 | 22.81% | |
| medium | Delaunay | 23,332 | 6:28:52 | 889,929 | 10, 7:12:09 | 2.62% |
| Square | 31,848 | 8:50:48 | 1,155,314 | 13, 8:55:14 | 2.76% | |
| Voronoi | 92,073 | 25:34:33 | 1,579,680 | 18, 6:48:00 | 5.83% | |
| coarse | Delaunay | 14,195 | 3:56:35 | 1,042,933 | 12, 1:42:13 | 1.36% |
| Square | 4692 | 1:18:12 | 1,485,585 | 17, 4:39:45 | 0.32% | |
| Voronoi | 3736 | 1:02:16 | 2,324,237 | 26, 21:37:17 | 0.16% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozaki, M.; Aryal, J.; Fox-Hughes, P. Dynamic Wildfire Navigation System. ISPRS Int. J. Geo-Inf. 2019, 8, 194. https://doi.org/10.3390/ijgi8040194
Ozaki M, Aryal J, Fox-Hughes P. Dynamic Wildfire Navigation System. ISPRS International Journal of Geo-Information. 2019; 8(4):194. https://doi.org/10.3390/ijgi8040194
Chicago/Turabian StyleOzaki, Mitsuhiro, Jagannath Aryal, and Paul Fox-Hughes. 2019. "Dynamic Wildfire Navigation System" ISPRS International Journal of Geo-Information 8, no. 4: 194. https://doi.org/10.3390/ijgi8040194
APA StyleOzaki, M., Aryal, J., & Fox-Hughes, P. (2019). Dynamic Wildfire Navigation System. ISPRS International Journal of Geo-Information, 8(4), 194. https://doi.org/10.3390/ijgi8040194