GIS Mapping of Driving Behavior Based on Naturalistic Driving Data

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Strategies and Tools
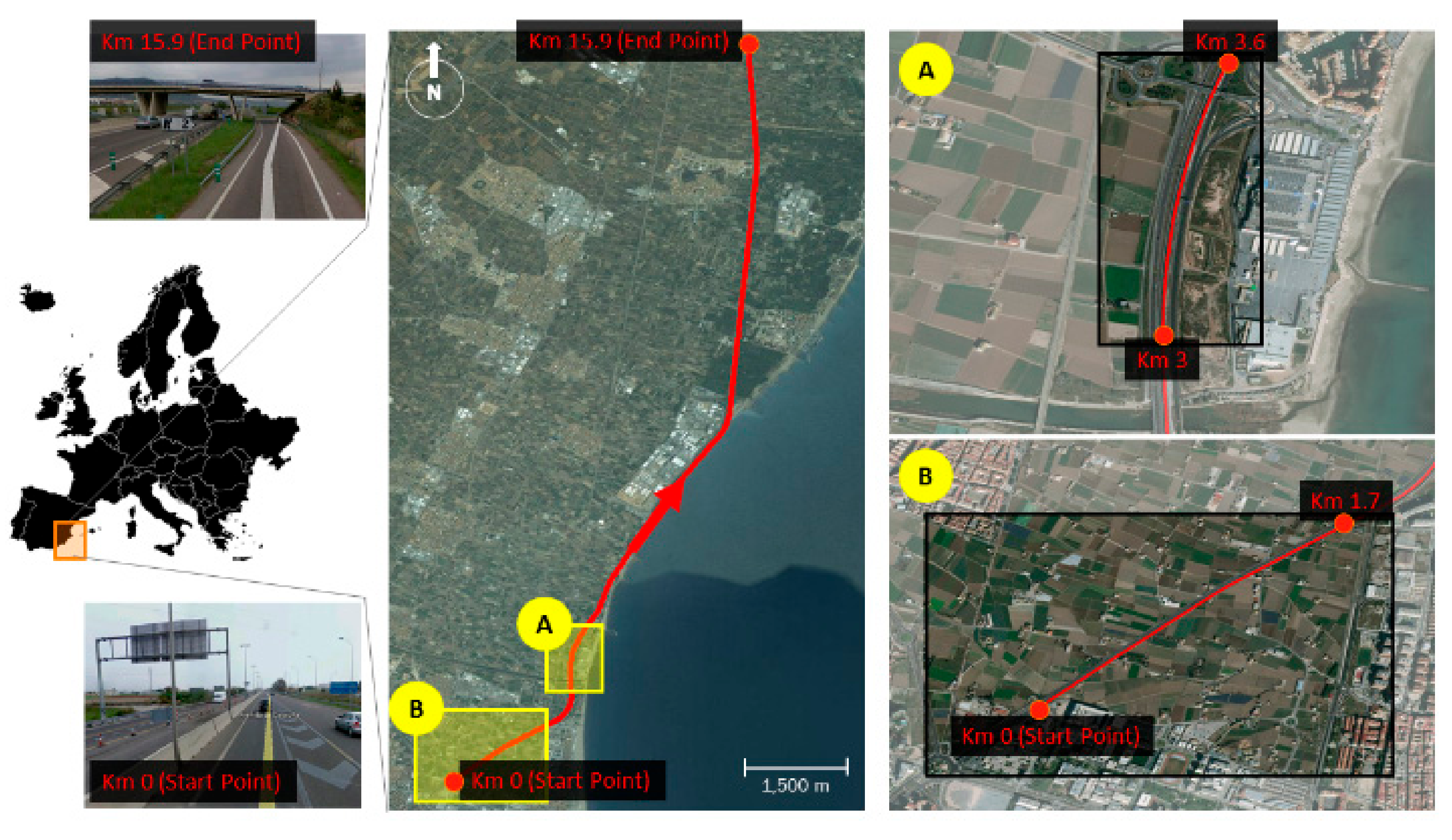
3. Data and Study Area
4. Methodology and Results
5. Benefits
- (a)
- At a macro-level of detail,
- The facilitation of a more general perspective of the driver performance allowing standard and non-standard (or anomalous) driving behavior to be derived.
- The rapid detection of anomalous behavior, such as fast speed driving, abnormal speed changes, slow and/or wrong reactions to hazardous situations, etc.
- The influence of road path on certain kinematic parameters, such as braking, acceleration, and deceleration actions.
- The analysis of driving performance under certain conditions related with particular environments, traffic congestions, weather, etc.
- The establishment of common driving patterns based on different factors, such as daytime, genre, socioeconomic status, etc.
- (b)
- At a micro-level of detail,
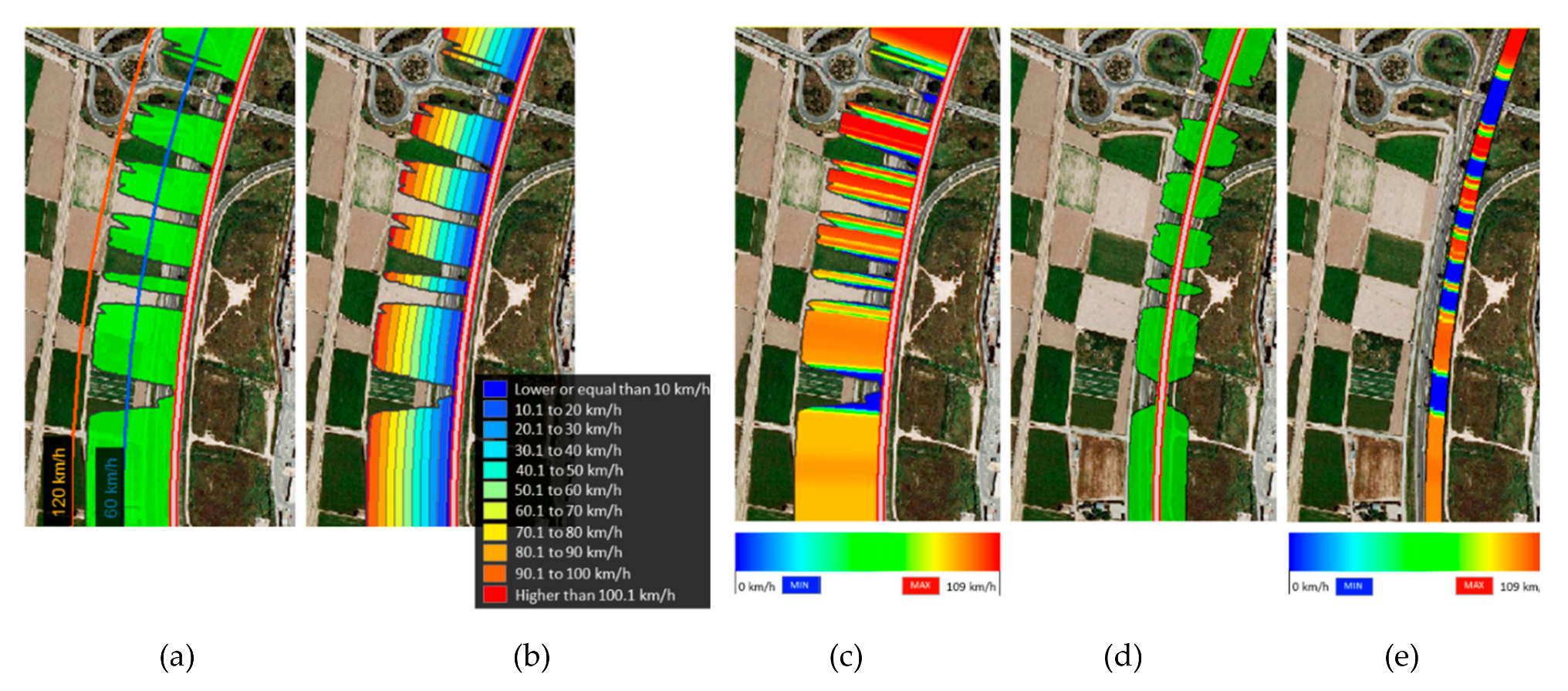
- The achievement of a holistic vision of the driving performance for any subject. Thus, it is possible to analyze in detail how certain maneuvers (related to entry/exit in motorways, over-taking, and interactions between drivers and/or pedestrians) really happen. It is shown in Figure 5, where more data layers are sequentially included from left (two in Figure 5a) to right (four in Figure 5c).
- The evaluation of the level of compliance with road signs and the degree of efficiency of awareness campaigns.
- The detection of road sections that are potentially dangerous not only in terms of crashes, but also other incidents, such as near-crashes or anomalous behavior.
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dulebenets, M.A. A comprehensive multi-objective optimization model for the vessel scheduling problem in liner shipping. Int. J. Prod. Econ. 2018, 196, 293–318. [Google Scholar] [CrossRef]
- Wagenaar, J.; Kroon, L.; Fragkos, I. Rolling stock rescheduling in passenger railway transportation using dead-heading trips and adjusted passenger demand. Transp. N.a. B Methodol. 2017, 101, 140–161. [Google Scholar] [CrossRef]
- Liu, L.; Chen, R.-C. A novel passenger flow prediction model using deep learning methods. Transp. N.a. C Emerg. Technol. 2017, 84, 74–91. [Google Scholar] [CrossRef]
- Jalalian, M.; Gholami, S.; Ramezanian, R. Analyzing the trade-off between CO2 emissions and passenger service level in the airline industry: Mathematical modeling and constructive heuristic. J. Clean. Prod. 2019, 206, 251–266. [Google Scholar] [CrossRef]
- Lindsey, C.R.; Vehoef, E. Traffic congestion and congestion pricing. In Handbook of Transport Systems and Traffic Control (Handbooks in Transport, Volume 3); Button, K.J., Hensher, D.A., Eds.; Emerald Group Publishing Limited: Bingley, UK, 2001; Volume 3, pp. 77–105. ISBN 978-0-08-043595-4. [Google Scholar]
- Lin, E.T.; Lan, L.W. Accounting for accidents in the measurement of transport inefficiency: A case of Taiwanese bus transit. Int. J. Sustain. Dev. 2009, 8, 365–385. [Google Scholar] [CrossRef]
- Balsa-Barreiro, J.; Ambuhl, L.; Menendez, M.; Pentland, A. ’Sandy’. Mapping time-varying accessibility and territorial cohesion with time-distorted maps. IEEE N.a. 2019, 7, 41702–41714. [Google Scholar] [CrossRef]
- Raffin, N.; Seegmuller, T. The cost of pollution on longevity, welfare and economic stability. Environ. Resour. Econ. 2017, 68, 683–704. [Google Scholar] [CrossRef]
- Forns, J.; Davdand, P.; Foraster, M.; Rivas, I.; Esnaola, M.; Garcia-Esteban, R.; Suades-Gonzalez, E.; Cirach, M.; Grellier, J.; Guxens, M.; et al. Traffic-related air pollution, noise at school, and behavioral problems in Barcelona schoolchildren: A cross-sectional study. Environ. Health Persp. 2016, 124, 529–535. [Google Scholar] [CrossRef] [PubMed]
- Dobbs, R.; Remes, J.; Manyka, J.; Roxburgh, C.; Smith, S.; Schaer, F. Urban World: Cities and the Rise of the Consuming Class, McKinsey Global Institute. 2012. Available online: https://www.mckinsey.com/global-themes/urbanization/urban-world-cities-and-the-rise-of-the-consuming-class (accessed on 14 March 2019).
- Buchanan, C. Traffic in Towns. A Study of the Long Term Problems of Traffic in Urban Areas, 1st ed.; Routledge: London, UK, 2015; ISBN 978-1138775992. [Google Scholar]
- Zheng, X. Determinants of agglomeration economies and diseconomies: Empirical evidence from Tokyo. Soc.-Econ. Plan. Sci. 2001, 35, 131–144. [Google Scholar] [CrossRef]
- Higano, Y.; Shibusawa, H. Agglomeration diseconomies of traffic congestion and agglomeration economies of interaction in the information-oriented city. J. Regional Sci. 1999, 39, 21–49. [Google Scholar] [CrossRef]
- Büscher, M.; Coulton, P.; Efstratiou, C.; Gellersen, H.; Hemment, D.; Mehmood, R.; Sangiorgi, D. Intelligent mobility systems: some socio-technical challenges and opportunities. In Proceedings of the 1st International Conference on Communications Infrastructure. Systems and Applications in Europe, London, UK, 11–13 August 2009; pp. 140–152. [Google Scholar]
- Schlingensiepen, J.; Mehmood, R.; Nemtanu, F.; Niculescu, M. Increasing sustainability of road transport in European cities and metropolitan areas by facilitating autonomic road transport systems (ARTS). In Proceedings of the 5th International Conference Sustainable Automotive Technologies, Ingolstadt, Germany, 25–27 September 2013; pp. 201–210. [Google Scholar]
- Evans, L. Traffic Safety; Science Service Society: Bloomfield Hills, MI, USA, 2004; Available online: http://www.scienceservingsociety.com/ts/rvs/AJPM.pdf (accessed on 14 March 2019).
- World Health Organization (WHO). Global Status Report on Road Safety; Department of Violence and Injury Prevention and Disability: Genève, Switzerland, 2010; Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2018/en (accessed on 14 March 2019).
- Australian Road Research Board (ARRB). Guide to Road Safety Part 6: Road Safety Audit. 2009. Available online: https://www.onlinepublications.austroads.com.au/items/AGRS06-09 (accessed on 14 March 2019).
- NurFazzillah, M.N.; Mahmud, A.R.; Ahmad, N. Value-adding Safety Audit with GIS. Geospatial World. 2011. Available online: https://www.geospatialworld.net/article/value-adding-road-safety-audit-with-gis (accessed on 14 March 2019).
- Backer-Grøndahl, A.; Phillips, R.; Sagberg, F.; Touliou, K.; Gatscha, M. Topics and Applications of Previous and Current Naturalistic Driving Studies; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D1.1); Institute of Transport Economics (TØI): Oslo, Norway, 2009; Available online: https://prologue.kfv.at/fileadmin/content/Dokumente/PROLOGUE_D1.1.pdf (accessed on 14 March 2019).
- McLaughlin, S.B.; Hankey, J.M.; Dingus, T.A. A method for evaluating avoidance systems using naturalistic driving data. Accident Anal. Prev. 2008, 40, 8–16. [Google Scholar] [CrossRef]
- Valero-Mora, P.M.; Tontsch, A.; Welsh, R. Is naturalistic driving research possible with highly instrumented cars? Lessons learnt in three research centres. Accident Anal. Prev. 2013, 58, 187–194. [Google Scholar] [CrossRef]
- Amediku, D. Application of GIS to Road Safety Auditing as an Option to Road Accident Management. Master Thesis, Kwame Nkrumah University, Kumasi, Ghana, 2000. [Google Scholar]
- Backer-Grøndahl, A.; Lotan, T.; van Schagen, I. Summary and Integration of a Series of Naturalistic Driving Field Trials; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D3.7); Institute of Transport Economics (TØI): Oslo, Norway, 2011; Available online: https://prologue.kfv.at/fileadmin/content/Dokumente/PROLOGUE_D3.7.pdf (accessed on 14 March 2019).
- Pilgerstorfer, M.; Runda, K.; Brandstätter, C.; Christoph, M.; Hakkert, S.; Ishaq, R.; Toledo, T.; Gatscha, M. Small Scale Naturalistic Driving Pilot; DaCoTa. Deliverable D6.3; Kuratorium für Verkehrssicherheit (KfV): Vienna, Austria, 2011; Available online:http://www.dacota-project.eu/Deliverables/DaCoTA_D6%203_Report%20on%20Small%20scale%20ND%20pilot%20Final_20120625.pdf (accessed on 14 March 2019).
- Balsa-Barreiro, J.; Pareja, I.; Tontsch, A.; Sánchez, M. Preprocessing of Data for Recovery of Positioning Data in Naturalistic Driving Trial. In Proceedings of the 3rd European Conference on Human Centred Design for Intelligent Transport Systems, Valencia, Spain, 14–15 June 2012; pp. 235–245. [Google Scholar]
- Balsa-Barreiro, J.; Valero-Mora, P.M.; Pareja, I.; Sánchez, M. Georeferencing naturalistic driving data using a novel method based on vehicle speed. IET Intell. Transp. Sy. 2013, 7, 190–197. [Google Scholar] [CrossRef]
- Balsa-Barreiro, J.; Valero-Mora, P.M.; Pareja, I.; Sánchez, M. Quality Control Procedure for Naturalistic Driving Data Using Geographic Information Systems. In Proceedings of the 4th European Conference on Human Centred Design for Intelligent Transport Systems, Vienna, Austria, 20 June 2014. [Google Scholar]
- Balsa-Barreiro, J.; Valero-Mora, P.M.; Pareja, I.; Sánchez, M. Proposal of GIS methodology for quality control procedures (QC) of data obtained in naturalistic driving studies. IET Intell. Transp. Sy. 2015, 9, 673–682. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Nearcrash/Crash Risk: An Analysis using the 100-car Naturalistic Driving Study Data; Virginia Tech Transportation Institute: Blacksburg, WV, USA, 2006. Available online:https://vtechworks.lib.vt.edu/bitstream/handle/10919/55090/DriverInattention.pdf (accessed on 14 March 2019).
- Dingus, T.A.; Klauer, S.G.; Neale, V.L.; Petersen, A.; Lee, S.E.; Sudweeks, J.D.; Perez, M.A.; Gupta, S.; Bucher, C.; Jermeland, J.; et al. The 100-car Naturalistic Driving Study, Phase II: Results of the 100-car Field Experiment; National Highway Traffic Safety Administration: Washington DC, USA, 2006; Available online: https://trid.trb.org/view/783477 (accessed on 14 March 2019).
- Stutts, J.; Feaganes, J.; Reinfurt, D. Driver’s exposure to distractions in their natural driving environment. Accident Anal. Prev. 2005, 37, 1093–1101. [Google Scholar] [CrossRef]
- Christoph, M.; van Nes, N.; Pauwelussen, J.; Mansvelders, R.; van der Horst, R.; Hoedemaeker, M. In-vehicle and Site-based Observations of Vehicles and Cyclists; a Small-scale ND Field Trial in the Netherlands; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D3.4); Nederlandse Organisatie voor Toegepast Natuurwetenschap-pelijk Onderzoek (TNO): Soesterberg, The Netherlands, 2010; Available online: https://prologue.kfv.at/fileadmin/content/Dokumente/PROLOGUE_D3.4.pdf (accessed on 14 March 2019).
- Wang, B.; Hallmark, S.; Savolainen, P.; Dong, J. Crashes and near-crashes on horizontal curves along rural two-lane highways: Analysis of naturalistic driving data. J. Safety Res. 2017, 6, 163–169. [Google Scholar] [CrossRef]
- Xiong, H.; Bao, S.; Sayer, J.; Kato, K. Examination of drivers’ cell phone use behavior at intersections by using naturalistic driving data. J. Safety Res. 2015, 54, 89–93. [Google Scholar] [CrossRef]
- Lassarre, S.; Dozza, M.; Jamson, S.; Lai, F.; Saad, F.; Vadeby, A.; Trent, V.; Brower, R.; Carsten, O.; Disilvestro, A.; et al. FESTA Support Action. Data Analysis and Modelling. Field Operational Test Support Action (Deliverable D2.4). 2008. Available online: https://dspace.lboro.ac.uk/dspace-jspui/bitstream/2134/5705/1/AR2604%20FESTA%20D2%204%20Data%20analysis%20and%20modeling.pdf (accessed on 14 March 2019).
- Gatscha, M.; Brandstätter, C.; Pripfl, J. Video-based Feedback for Learner and Novice Drivers: A Small-scale ND Field Trial in Austria; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D3.3); Test and Training International (TTI): Teesdorf bei Baden, Austria, 2010; Available online: https://prologue.kfv.at/fileadmin/content/Dokumente/PROLOGUE_D3.3.pdf (accessed on 14 March 2019).
- Jovanis, P.; Aguero-Valverde, J.; Wu, K.; Shankar, V. Naturalistic driving event data analysis: omitted variable bias and multilevel modeling approaches. Transp. Res. Record. 2011, 2236, 49–57. [Google Scholar] [CrossRef]
- Val, C.; Küfen, J. Data Processing Framework Supporting Large Scale Driving Data Analysis. MATLAB Virtual Conference. 2013. Available online: https://www.mathworks.com/videos/data-processing-framework-supporting-large-scale-driving-data-analysis-92591.html (accessed on 14 March 2019).
- Dozza, M. SAFER100Car: A Toolkit to Analyze Data from the 100 Car Naturalistic Driving Study. In Proceedings of the 2nd International Symposium on Naturalistic Driving Research, Blacksburg, VW, USA, 31 August–2 September 2010. [Google Scholar]
- Balsa-Barreiro, J. Application of GNSS and GIS Systems to Transport Infrastructures. Study Focusing on Naturalistic Driving. PhD dissertation, Dept. of Civil Engineering, University of A Coruna (Spain) and Politecnico di Torino (Italy), 2015. Ph.D. Dissertation, Dept. of Civil Engineering, University of A Coruna, Coruna, Spain, Politecnico di Torino, Italy, 2015. [Google Scholar]
- Gordon, T.; Green, P.; Kostyniuk, L. A Multivariate Analysis of Crash and Naturalistic Event Data in Relation to Highway Factors Using the GIS Framework. In Proceedings of the 4th SHRP-2 Safety Research Symposium, Washington DC, USA, 23–24 July 2009; Available online: http://onlinepubs.trb.org/onlinepubs/shrp2/07SYM-KosGreen.pdf (accessed on 14 March 2019).
- Van Schagen, I.; Welsh, R.; Backer-Grøndahl, A.; Sagberg, F.; Tsippy, L.; Hoedemae, M.; Morris, A. Towards a Large-scale European Naturalistic Driving Study: Main Findings of PROLOGUE; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D4.2); Institute for Road Safety Research (SWOV): Leidschendam, The Netherlands, 2011; Available online: https://dspace.lboro.ac.uk/dspace-jspui/bitstream/2134/9341/5/D4.2.pdf (accessed on 14 March 2019).
- Valero-Mora, P.M.; Tontsch, A.; Pareja, I.; Sánchez, M. Using a Highly Instrumented Car for Naturalistic Driving Research: A Small-scale Study in Spain; Promoting Real Life Observations for Gaining Understanding of Road Behaviour in Europe, PROLOGUE (Deliverable D3.5); Instituto de Tráfico y Seguridad Vial (INTRAS): Valencia, Spain, 2010; Available online: https://prologue.kfv.at/fileadmin/content/Dokumente/PROLOGUE_D3.5.pdf (accessed on 14 March 2019).
- Shepard, D. A Two-dimensional Interpolation Function for Irregularly-spaced Data. In Proceedings of the 23rd ACM National Conference, New York, NY, USA, 27–29 August 1968; pp. 517–524. [Google Scholar]
- Aguero-Valverde, J.; Jovanis, P.P. Analysis of road crash frequency with spatial models. Transport Res. Rec. 2008, 2061, 55–63. [Google Scholar] [CrossRef]
- Mitra, S. Enhancing Road Traffic Safety: A GIS Based Methodology to Identify Potential Areas of Improvement. Ph.D. Dissertation, Depart. of Civil and Environmental Engineering, University, San Luis Obispo, CA, USA, 2008. [Google Scholar]
- Jia, R.; Khadkab, A.; Kim, I. Traffic crash analysis with point-of-interest spatial clustering. Accident Anal. Prev. 2018, 121, 223–230. [Google Scholar] [CrossRef]
- Zou, Y.; Ash, J.E.; Park, B.; Lord, D.; Wu, L. Empirical Bayes estimates of finite mixture of negative binomial regression models and its application to highway safety. J. Appl. Stat. 2018, 45, 1652–1669. [Google Scholar] [CrossRef]
- Fawcett, L.; Thorpe, N.; Matthews, J.; Kremer, K. A novel Bayesian hierarchical model for road safety hotspot prediction. Accident Anal. Prev. 2017, 99, 262–271. [Google Scholar] [CrossRef] [PubMed]
- Balsa-Barreiro, J.; Lerma, J.L. A new methodology to estimate the discrete-return point density on airborne LiDAR surveys. Int. J. Remote Sens. 2014, 35, 1496–1510. [Google Scholar] [CrossRef]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balsa-Barreiro, J.; Valero-Mora, P.M.; Berné-Valero, J.L.; Varela-García, F.-A. GIS Mapping of Driving Behavior Based on Naturalistic Driving Data. ISPRS Int. J. Geo-Inf. 2019, 8, 226. https://doi.org/10.3390/ijgi8050226
Balsa-Barreiro J, Valero-Mora PM, Berné-Valero JL, Varela-García F-A. GIS Mapping of Driving Behavior Based on Naturalistic Driving Data. ISPRS International Journal of Geo-Information. 2019; 8(5):226. https://doi.org/10.3390/ijgi8050226
Chicago/Turabian StyleBalsa-Barreiro, José, Pedro M. Valero-Mora, José L. Berné-Valero, and Fco-Alberto Varela-García. 2019. "GIS Mapping of Driving Behavior Based on Naturalistic Driving Data" ISPRS International Journal of Geo-Information 8, no. 5: 226. https://doi.org/10.3390/ijgi8050226
APA StyleBalsa-Barreiro, J., Valero-Mora, P. M., Berné-Valero, J. L., & Varela-García, F. -A. (2019). GIS Mapping of Driving Behavior Based on Naturalistic Driving Data. ISPRS International Journal of Geo-Information, 8(5), 226. https://doi.org/10.3390/ijgi8050226