Methods to Detect Edge Effected Reductions in Fire Frequency in Simulated Forest Landscapes


Abstract
:1. Introduction
2. Materials and Methods
2.1. Simulated Forest Landscape with Gridded Fire Frequency (FF)
2.1.1. Simulated Annual Fires in a Forest Landscape
2.1.2. Maps of Grid-Level Fire Frequency (GFF)
2.2. Methods to Detect Edge Effected Regions (EERs) with Reduced Fire Frequency (RFF)
2.2.1. Moving Windows (MW)
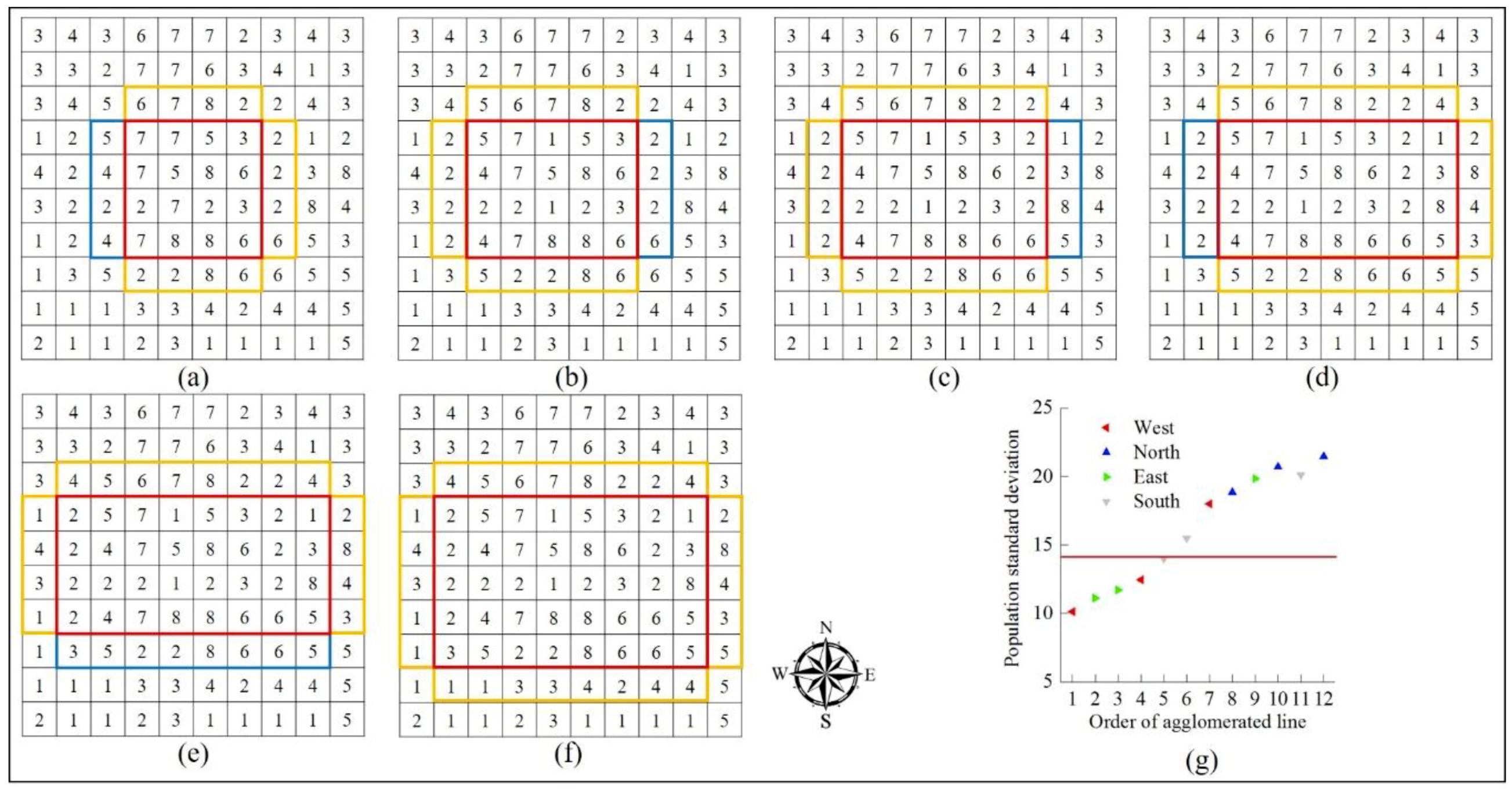
2.2.2. Agglomeration of Inner Lines (AIL)
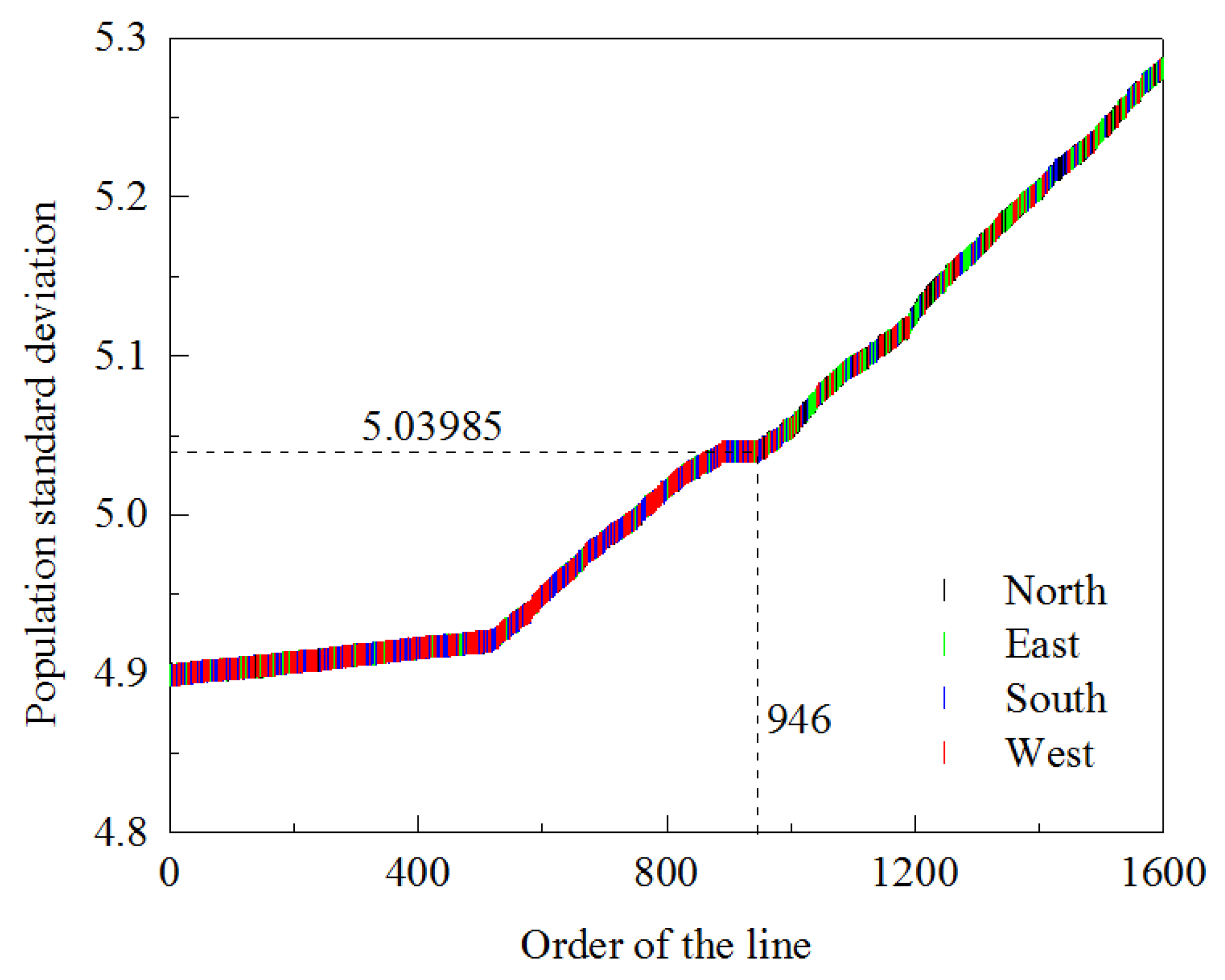
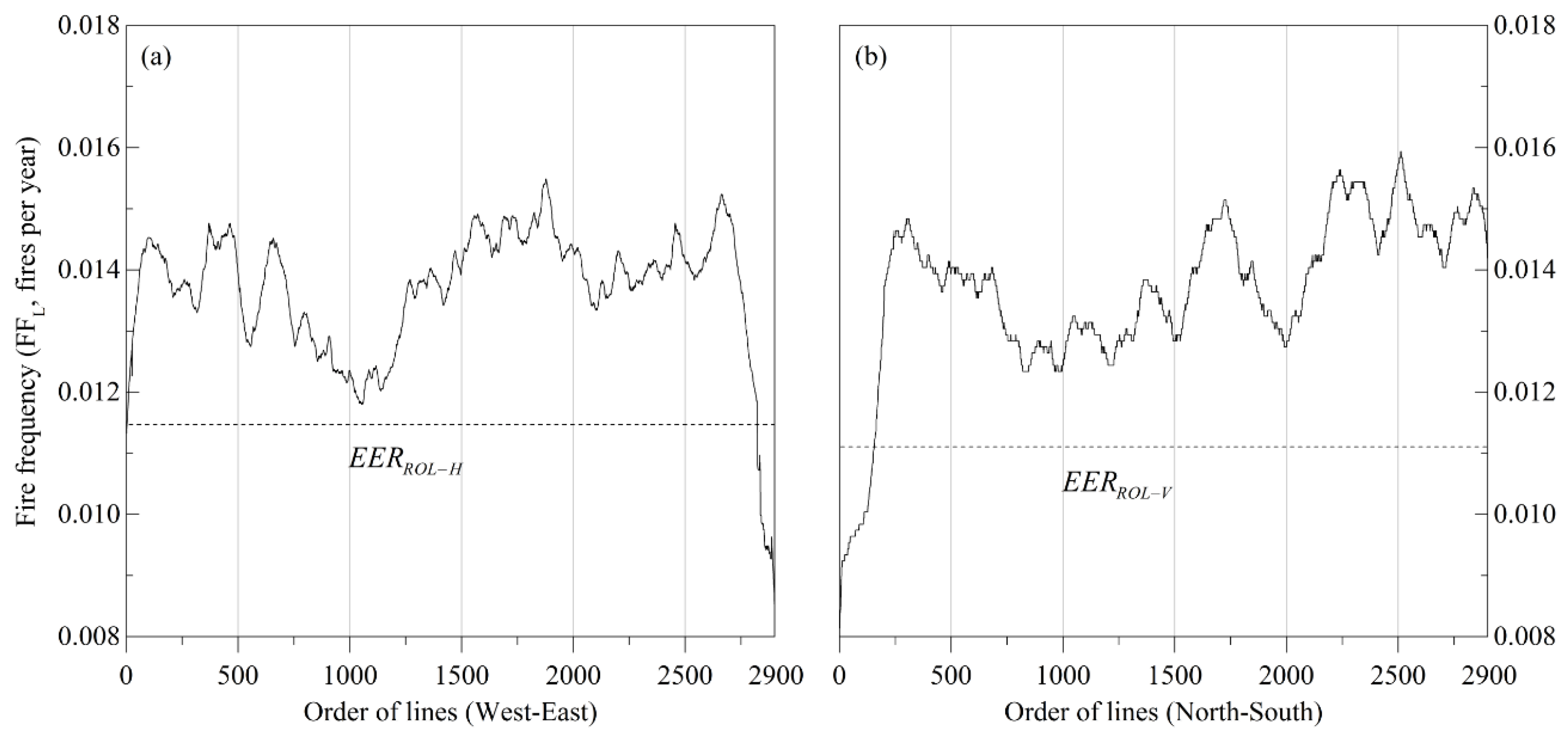
2.2.3. Removal of Outer Lines (ROL)
2.3. Comparison of the EERs Identified by the Three Methods
3. Results
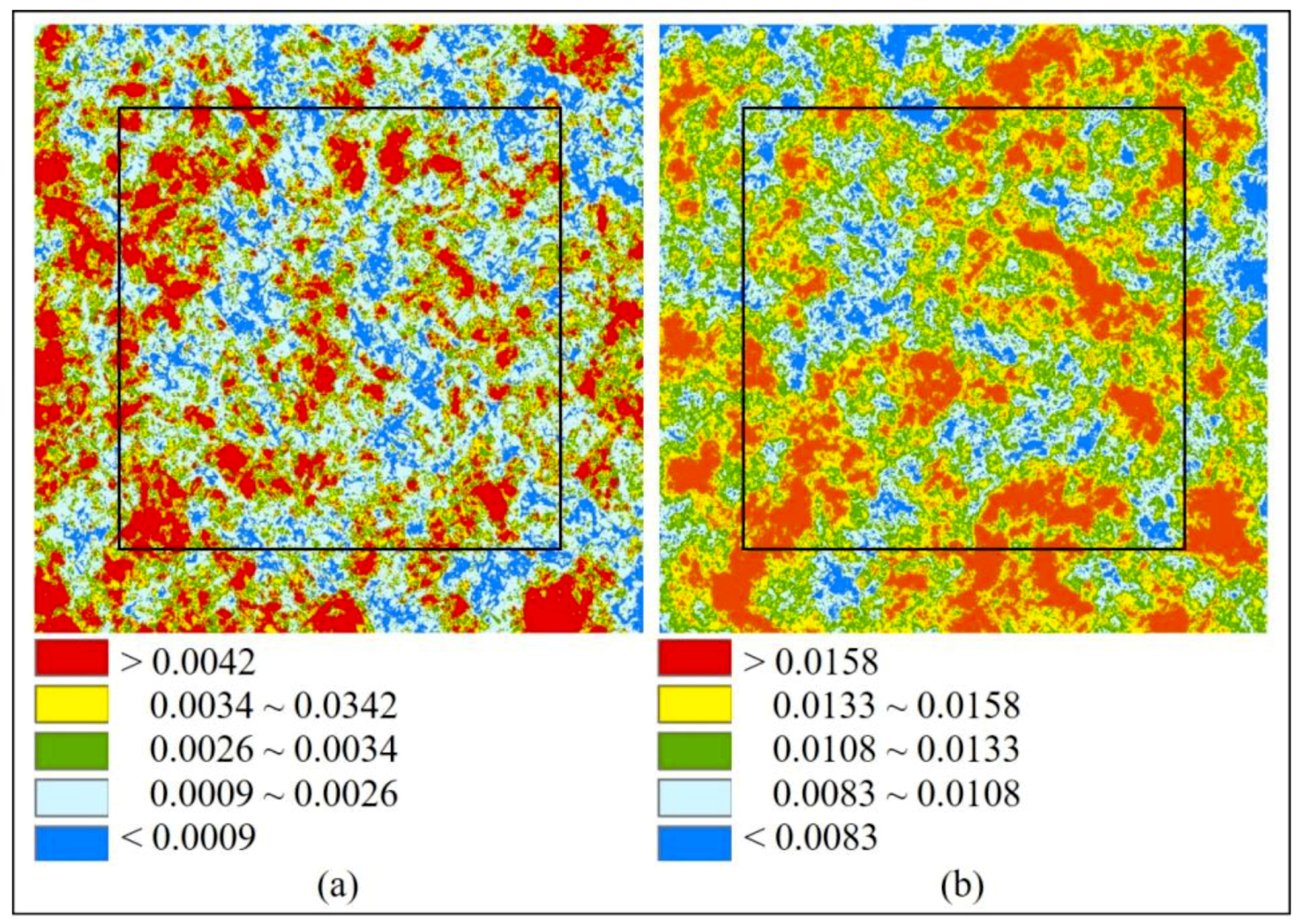
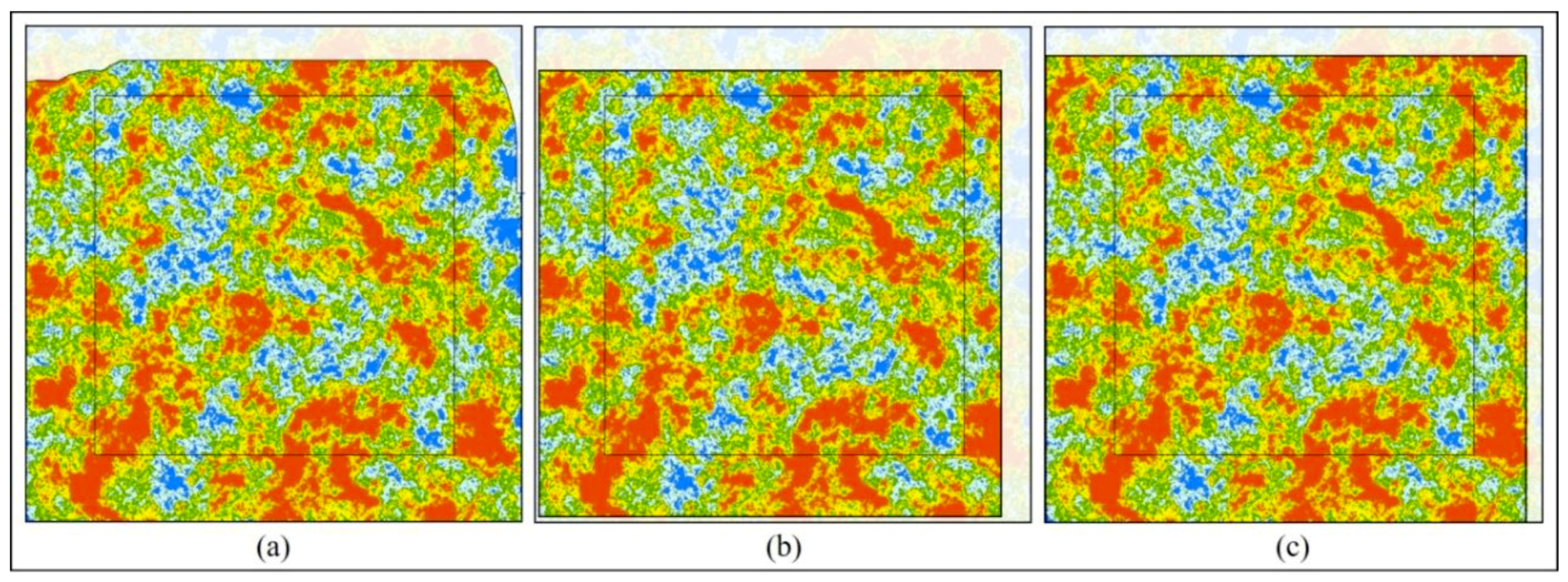
3.1. Grid-level Fire Frequency (GFF) Maps
3.2. Edge Effected Regions (EERs) with Reduced Fire Frequency (RFF)
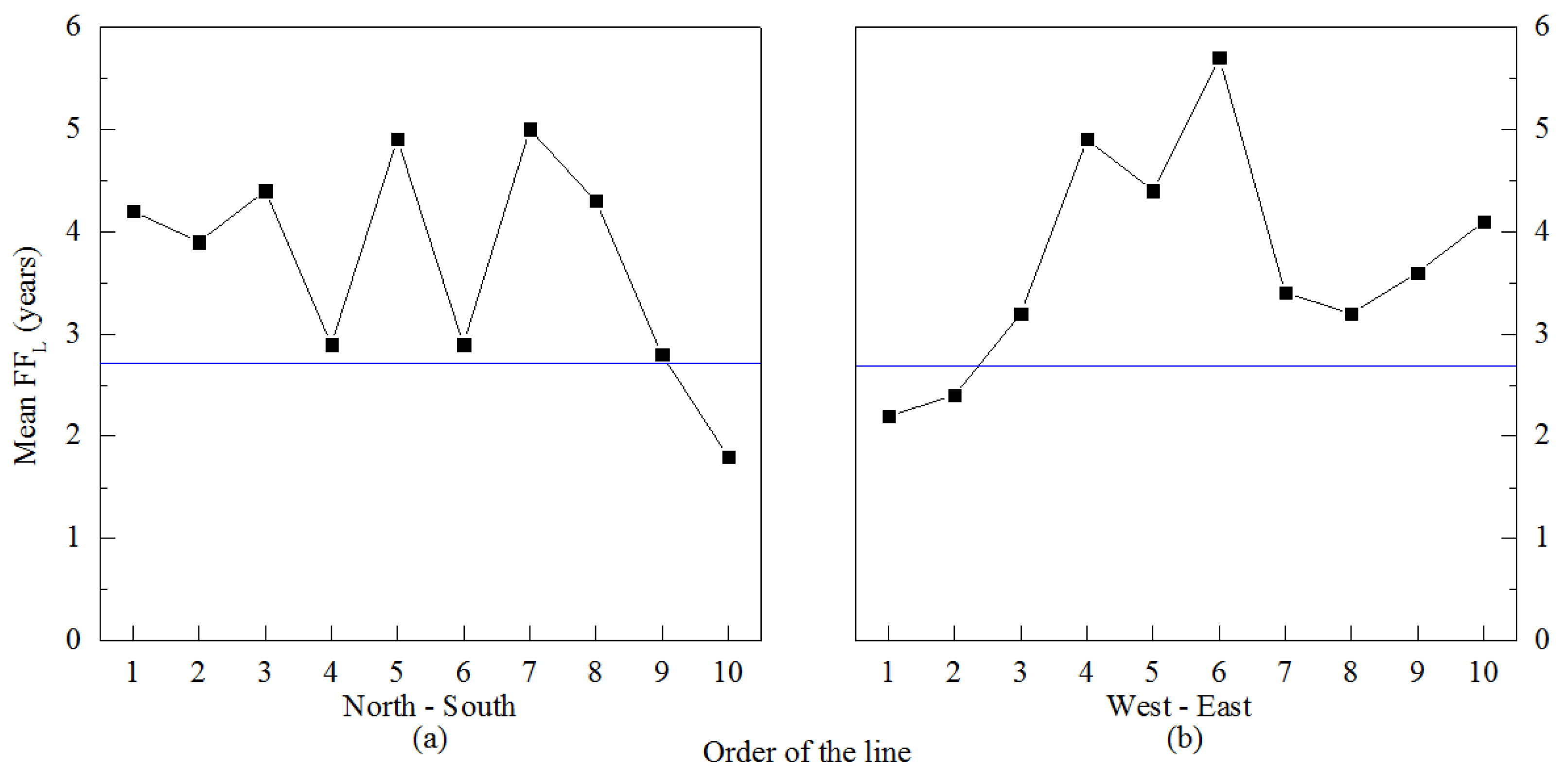
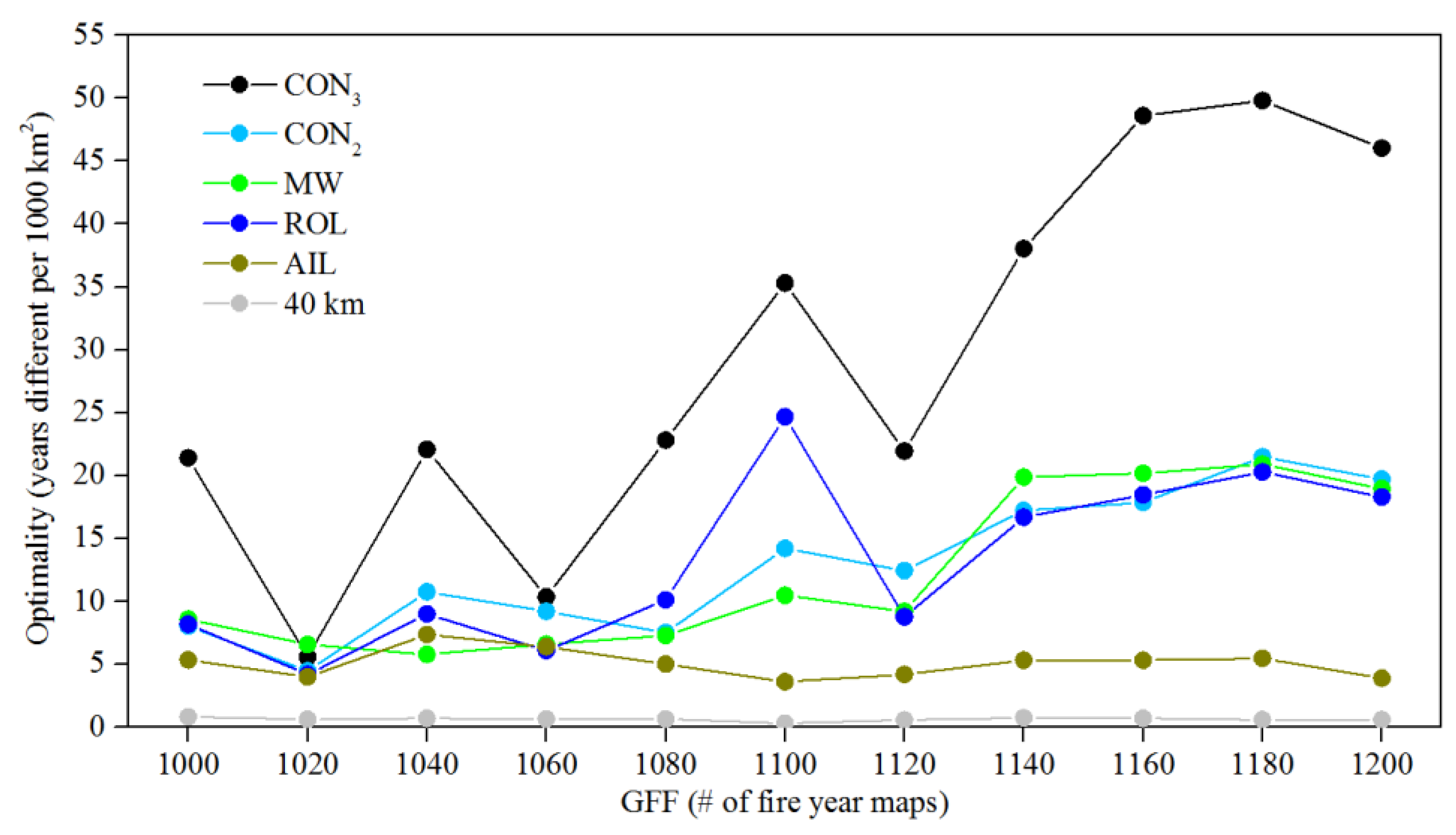
3.3. Fire Rotation (FR) Differences and Optimality
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AIL—Agglomeration of inner lines |
| CON2—Consensus model where two EERs concur |
| CON3—Consensus model where all three EERs concur |
| EER—Edge effected region |
| FF—Fire frequency |
| FR—Fire rotation |
| GFFN—Grid level fire frequency map created using N fire-year maps |
| LANDIS—Landscape disturbance and succession model |
| MW—Moving window |
| RFF—Reduced fire frequency |
| ROL—Removal of outer lines |
References
- Ries, L.; Fletcher, R.J., Jr.; Battin, J.; Sisk, T.D. Ecological responses to habitat edges: Mechanisms, models, and variability explained. Annu. Rev. Ecol. Evol. Syst. 2004, 35, 491–522. [Google Scholar] [CrossRef]
- Murcia, C. Edge effects in fragmented forests: Implications for conservation. Trends Ecol. Evol. 1995, 10, 58–62. [Google Scholar] [CrossRef]
- Laurance, W.F.; Lovejoy, T.E.; Vasconcelos, H.L.; Bruna, E.M.; Didham, R.K.; Stouffer, P.C.; Gascon, C.; Bierregaard, R.O.; Laurance, S.G.; Sampaio, E. Ecosystem decay of Amazonian forest fragments: A 22-year investigation. Conserv. Biol. 2002, 16, 605–618. [Google Scholar] [CrossRef]
- Peterson, G.D. Contagious disturbance, ecological memory, and the emergence of landscape pattern. Ecosystems 2002, 5, 329–338. [Google Scholar] [CrossRef]
- Charpentier, A.; Gallic, E. Kernel density estimation based on Ripley’s correction. GeoInformatica 2016, 20, 95–116. [Google Scholar] [CrossRef]
- Clark, P.J.; Evans, F.C. Distance to nearest neighbor as a measure of spatial relationships in populations. Ecology 1954, 35, 445–453. [Google Scholar] [CrossRef]
- López-Alfaro, C.; Estades, C.F.; Aldridge, D.K.; Gill, R.M. Individual-based modeling as a decision tool for the conservation of the endangered huemul deer (Hippocamelus bisulcus) in southern Chile. Ecol. Model. 2012, 244, 104–116. [Google Scholar] [CrossRef]
- Finney, M.A. The challenge of quantitative risk analysis for wildland fire. For. Ecol. Manag. 2005, 211, 97–108. [Google Scholar] [CrossRef]
- Cumming, S. A parametric model of the fire-size distribution. Can. J. For. Res. 2001, 31, 1297–1303. [Google Scholar] [CrossRef]
- Haefner, J.W.; Poole, G.C.; Dunn, P.V.; Decker, R.T. Edge effects in computer models of spatial competition. Ecol. Model. 1991, 56, 221–244. [Google Scholar] [CrossRef]
- Yamada, I.; Rogerson, P.A. An empirical comparison of edge effect correction methods applied to K-function analysis. Geogr. Anal. 2003, 35, 97–109. [Google Scholar]
- Pommerening, A.; Stoyan, D. Edge-correction needs in estimating indices of spatial forest structure. Can. J. For. Res. 2006, 36, 1723–1739. [Google Scholar] [CrossRef] [Green Version]
- Yue, X.; Weinan, E. The local microscale problem in the multiscale modeling of strongly heterogeneous media: Effects of boundary conditions and cell size. J. Comput. Phys. 2007, 222, 556–572. [Google Scholar] [CrossRef]
- Kitzberger, T.; Aráoz, E.; Gowda, J.H.; Mermoz, M.; Morales, J.M. Decreases in fire spread probability with forest age promotes alternative community states, reduced resilience to climate variability and large fire regime shifts. Ecosystems 2012, 15, 97–112. [Google Scholar] [CrossRef]
- Fagan, W.F.; Fortin, M.-J.; Soykan, C. Integrating edge detection and dynamic modeling in quantitative analyses of ecological boundaries. BioScience 2003, 53, 730–738. [Google Scholar] [CrossRef]
- Körmöczi, L.; Bátori, Z.; Erdős, L.; Tölgyesi, C.; Zalatnai, M.; Varró, C. The role of randomization tests in vegetation boundary detection with moving split-window analysis. J. Veg. Sci. 2016, 27, 1288–1296. [Google Scholar] [CrossRef]
- Whittaker, R.H. Vegetation of the Siskiyou mountains, Oregon and California. Ecol. Monogr. 1960, 30, 279–338. [Google Scholar] [CrossRef]
- Florinsky, I.V. Accuracy of local topographic variables derived from digital elevation models. Int. J. Geogr. Inf. Sci. 1998, 12, 47–62. [Google Scholar] [CrossRef]
- Fortin, M.J. Edge detection algorithms for two-dimensional ecological data. Ecology 1994, 75, 956–965. [Google Scholar] [CrossRef]
- Davis, L.S. A survey of edge detection techniques. Comput. Graph. Image Process. 1975, 4, 248–270. [Google Scholar] [CrossRef]
- Nadernejad, E.; Sharifzadeh, S.; Hassanpour, H. Edge detection techniques: Evaluations and comparisons. Appl. Math. Sci. 2008, 2, 1507–1520. [Google Scholar]
- Johnson, E.A.; Gutsell, S.L. Fire frequency models, methods and interpretations. Adv. Ecol. Res. 1994, 25, 239–287. [Google Scholar]
- Wei, X.; Larsen, C. Assessing the minimum number of time since last fire sample-points required to estimate the fire cycle: Influences of fire rotation length and study area scale. Forests 2018, 9, 708. [Google Scholar] [CrossRef]
- Gascon, C.; Williamson, G.B.; da Fonseca, G.A. Receding forest edges and vanishing reserves. Science 2000, 288, 1356–1358. [Google Scholar] [CrossRef]
- Hébert-Dufresne, L.; Pellegrini, A.F.; Bhat, U.; Redner, S.; Pacala, S.W.; Berdahl, A.M. Edge fires drive the shape and stability of tropical forests. Ecol. Lett. 2018, 21, 794–803. [Google Scholar] [CrossRef] [Green Version]
- He, H.S.; Mladenoff, D.J.; Crow, T.R. Linking an ecosystem model and a landscape model to study forest species response to climate warming. Ecol. Model. 1999, 114, 213–233. [Google Scholar] [CrossRef]
- Pennanen, J.; Kuuluvainen, T. A spatial simulation approach to natural forest landscape dynamics in boreal Fennoscandia. For. Ecol. Manag. 2002, 164, 157–175. [Google Scholar] [CrossRef]
- Scheller, R.M.; Mladenoff, D.J.; Crow, T.R.; Sickley, T.A. Simulating the effects of fire reintroduction versus continued fire absence on forest composition and landscape structure in the Boundary Waters Canoe Area, northern Minnesota, USA. Ecosystems 2005, 8, 396–411. [Google Scholar] [CrossRef]
- Li, C. Estimation of fire frequency and fire cycle: A computational perspective. Ecol. Model. 2002, 154, 103–120. [Google Scholar] [CrossRef]
- Parsons, R.A.; Heyerdahl, E.K.; Keane, R.E.; Dorner, B.; Fall, J. Assessing accuracy of point fire intervals across landscapes with simulation modelling. Can. J. For. Res. 2007, 37, 1605–1614. [Google Scholar] [CrossRef]
- Parisien, M.-A.; Miller, C.; Ager, A.A.; Finney, M.A. Use of artificial landscapes to isolate controls on burn probability. Landsc. Ecol. 2009, 25, 79–93. [Google Scholar] [CrossRef]
- Parks, S.A.; Parisien, M.-A.; Miller, C. Spatial bottom-up controls on fire likelihood vary across western North America. Ecosphere 2012, 3. [Google Scholar] [CrossRef]
- Cyr, D.; Gauthier, S.; Boulanger, Y.; Bergeron, Y. Quantifying fire cycle from dendroecological records using survival analyses. Forests 2016, 7, 131. [Google Scholar] [CrossRef]
- Erni, S.; Arseneault, D.; Parisien, M.A. Stand age influence on potential wildfire ignition and spread in the boreal forest of northeastern Canada. Ecosystems 2018, 21, 1471–1486. [Google Scholar] [CrossRef]
- Schmidtlein, S.; Tichý, L.; Feilhauer, H.; Faude, U. A brute-force approach to vegetation classification. J. Veg. Sci. 2010, 21, 1162–1171. [Google Scholar] [CrossRef]
- Marmion, M.; Parviainen, M.; Luoto, M.; Heikkinen, R.K.; Thuiller, W. Evaluation of consensus methods in predictive species distribution modelling. Divers. Distrib. 2009, 15, 59–69. [Google Scholar] [CrossRef]
- Scheller, R.M.; Domingo, J.B.; Sturtevant, B.R.; Williams, J.S.; Rudy, A.; Gustafson, E.J.; Mladenoff, D.J. Design, development, and application of LANDIS-II, a spatial landscape simulation model with flexible temporal and spatial resolution. Ecol. Model. 2007, 201, 409–419. [Google Scholar] [CrossRef]
- Mladenoff, D.J. LANDIS and forest landscape models. Ecol. Model. 2004, 180, 7–19. [Google Scholar] [CrossRef]
- Sturtevant, B.R.; Gustafson, E.J.; Li, W.; He, H.S. Modeling biological disturbances in LANDIS: A module description and demonstration using spruce budworm. Ecol. Model. 2004, 180, 153–174. [Google Scholar] [CrossRef]
- Garcia, R.A.; Burgess, N.D.; Cabeza, M.; Rahbek, C.; Araújo, M.B. Exploring consensus in 21st century projections of climatically suitable areas for African vertebrates. Glob. Chang. Biol. 2012, 18, 1253–1269. [Google Scholar] [CrossRef]
- Suh, M.S.; Oh, S.-G.; Lee, D.-K.; Cha, D.-H.; Choi, S.-J.; Jin, C.-S.; Hong, S.-Y. Development of new ensemble methods based on the performance skills of regional climate models over South Korea. J. Clim. 2012, 25, 7067–7082. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GFFN | MW Max. | AIL Max. | ROL Max. | Weighted Mean Edge (km) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Width | Side | Width | Side | Width | Side | MW | AIL | ROL | |
| 1000 | 40.2 | N | 29.6 | N | 18.4 | N | 13.6 | 17.3 | 10.0 |
| 1020 | 38.8 | W | 27.1 | N | 19.8 | N | 12.3 | 15.2 | 10.6 |
| 1040 | 38.7 | N | 25.3 | N | 17.8 | E | 13.1 | 14.6 | 9.3 |
| 1060 | 58.1 | W | 25.6 | E | 19.7 | N | 13.4 | 14.2 | 8.2 |
| 1080 | 48.1 | W | 24.9 | N | 17.1 | E | 12.2 | 14.2 | 8.9 |
| 1100 | 57.7 | W | 28.0 | E | 15.1 | E | 9.7 | 14.5 | 6.6 |
| 1120 | 45.9 | W | 24.1 | N | 13.2 | E | 8.6 | 13.5 | 6.8 |
| 1140 | 57.5 | W | 22.6 | E | 12.5 | N | 8.4 | 12.8 | 6.7 |
| 1160 | 59.7 | W | 25.6 | N | 18.1 | N | 8.3 | 14.1 | 7.0 |
| 1180 | 56.8 | W | 22.4 | N | 17.8 | N | 7.1 | 12.3 | 6.8 |
| 1200 | 58.8 | W | 25.6 | N | 15.5 | N | 6.7 | 12.3 | 5.9 |
| GFF Map | MW | AIL | ROL | CON2 | CON3 |
|---|---|---|---|---|---|
| GFF1000 | 15.9 | 21.3 | 13.3 | 15.9 | 7.8 |
| GFF1020 | 14.3 | 18.8 | 14.3 | 14.6 | 8.0 |
| GFF1040 | 15.8 | 18.3 | 12.4 | 14.3 | 7.3 |
| GFF1060 | 14.4 | 18.3 | 11.0 | 13.7 | 6.7 |
| GFF1080 | 14.2 | 18.4 | 11.9 | 14.2 | 7.1 |
| GFF1100 | 10.3 | 19.0 | 8.9 | 11.3 | 6.3 |
| GFF1120 | 9.6 | 18.0 | 9.2 | 9.8 | 6.4 |
| GFF1140 | 9.1 | 17.2 | 9.0 | 9.7 | 6.1 |
| GFF1160 | 9.3 | 19.2 | 9.4 | 9.7 | 5.7 |
| GFF1180 | 8.5 | 17.3 | 9.1 | 8.9 | 5.3 |
| GFF1200 | 8.5 | 17.4 | 8.0 | 8.3 | 4.9 |
| GFFN Map | MW | AIL | ROL | 40 km Buffer | CON2 | CON3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Int. | EER | Int. | EER | Int. | EER | Int. | EER | Int. | EER | Int. | EER | |
| GFF1000 | 194.8 | 309.7 | 196.6 | 290.2 | 200.9 | 291.4 | 196.3 | 228.7 | 195.9 | 303.1 | 201.9 | 342.4 |
| GFF1020 | 163.9 | 250.0 | 165.3 | 228.3 | 169.0 | 219.3 | 163.4 | 187.6 | 168.2 | 223.2 | 173.2 | 210.7 |
| GFF1040 | 132.7 | 209.3 | 123.0 | 236.4 | 132.9 | 228.7 | 128.0 | 155.4 | 126.3 | 255.5 | 134.9 | 270.4 |
| GFF1060 | 126.2 | 202.0 | 120.4 | 217.6 | 130.7 | 188.8 | 121.0 | 146.1 | 122.6 | 228.7 | 133.2 | 191.5 |
| GFF1080 | 113.3 | 200.1 | 111.7 | 189.2 | 113.6 | 214.9 | 111.4 | 137.0 | 112.9 | 202.6 | 115.9 | 252.1 |
| GFF1100 | 95.0 | 182.7 | 93.2 | 150.6 | 87.5 | 273.3 | 94.0 | 106.5 | 88.9 | 223.8 | 92.4 | 279.4 |
| GFF1120 | 89.7 | 164.0 | 85.3 | 147.7 | 90.6 | 158.4 | 87.3 | 109.6 | 86.7 | 189.3 | 89.2 | 207.3 |
| GFF1140 | 74.6 | 226.8 | 74.4 | 151.3 | 77.4 | 200.6 | 72.1 | 101.7 | 74.8 | 215.2 | 76.5 | 271.7 |
| GFF1160 | 71.4 | 229.3 | 70.3 | 156.3 | 72.2 | 218.3 | 73.1 | 100.5 | 71.9 | 217.6 | 72.8 | 305.8 |
| GFF1180 | 65.5 | 213.9 | 63.2 | 142.6 | 64.0 | 219.2 | 66.4 | 90.1 | 63.8 | 224.6 | 66.3 | 288.3 |
| GFF1200 | 61.6 | 197.1 | 61.2 | 117.1 | 63.2 | 186.3 | 61.5 | 85.5 | 61.6 | 199.3 | 63.8 | 253.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Larsen, C.P.S. Methods to Detect Edge Effected Reductions in Fire Frequency in Simulated Forest Landscapes. ISPRS Int. J. Geo-Inf. 2019, 8, 277. https://doi.org/10.3390/ijgi8060277
Wei X, Larsen CPS. Methods to Detect Edge Effected Reductions in Fire Frequency in Simulated Forest Landscapes. ISPRS International Journal of Geo-Information. 2019; 8(6):277. https://doi.org/10.3390/ijgi8060277
Chicago/Turabian StyleWei, Xinyuan, and Chris P. S. Larsen. 2019. "Methods to Detect Edge Effected Reductions in Fire Frequency in Simulated Forest Landscapes" ISPRS International Journal of Geo-Information 8, no. 6: 277. https://doi.org/10.3390/ijgi8060277
APA StyleWei, X., & Larsen, C. P. S. (2019). Methods to Detect Edge Effected Reductions in Fire Frequency in Simulated Forest Landscapes. ISPRS International Journal of Geo-Information, 8(6), 277. https://doi.org/10.3390/ijgi8060277