Three-Dimensional Indoor Fire Evacuation Routing


Abstract
:1. Introduction
2. Related Works
3. An Extended Indoor Model for Fire Evacuation
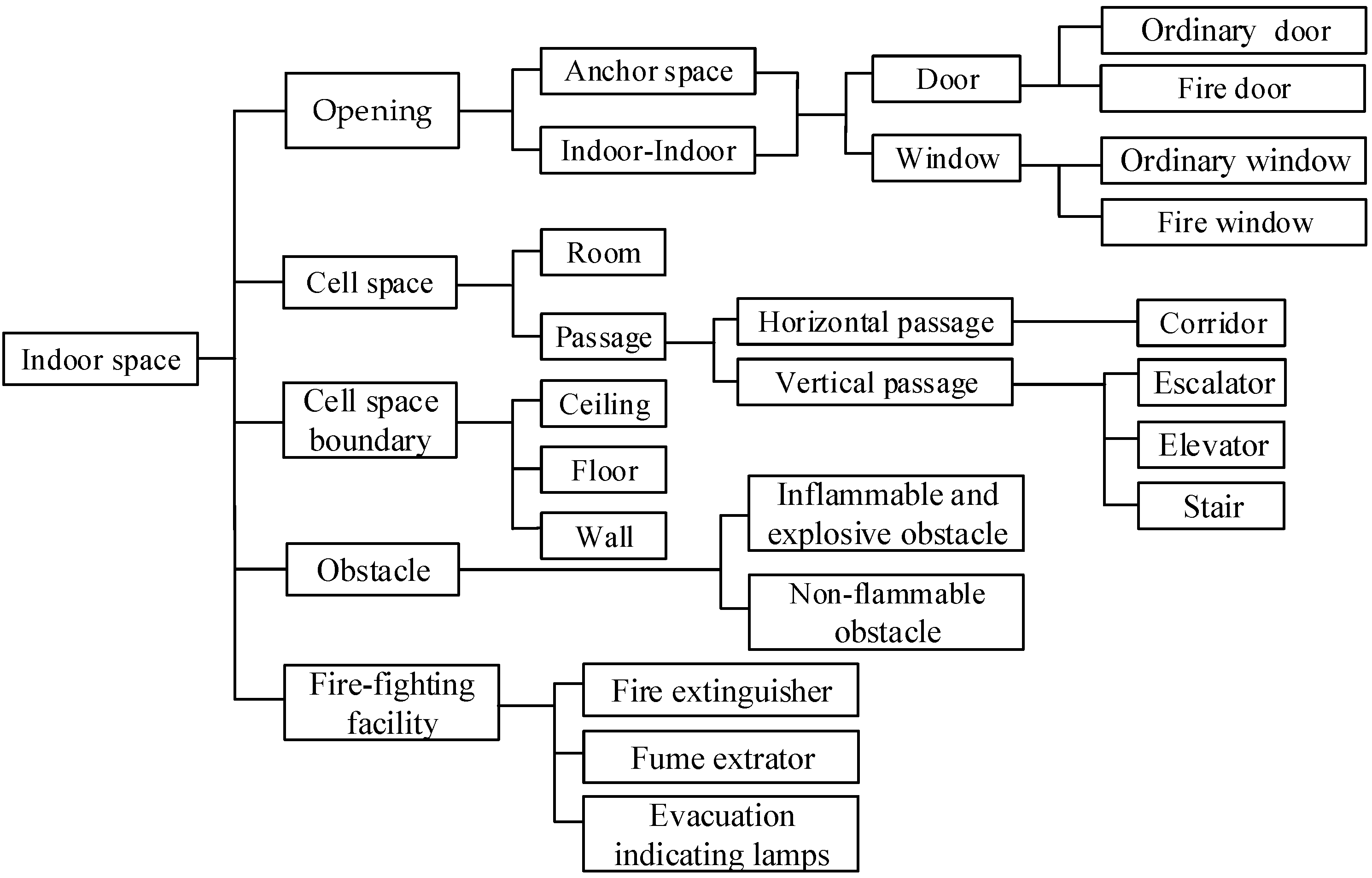
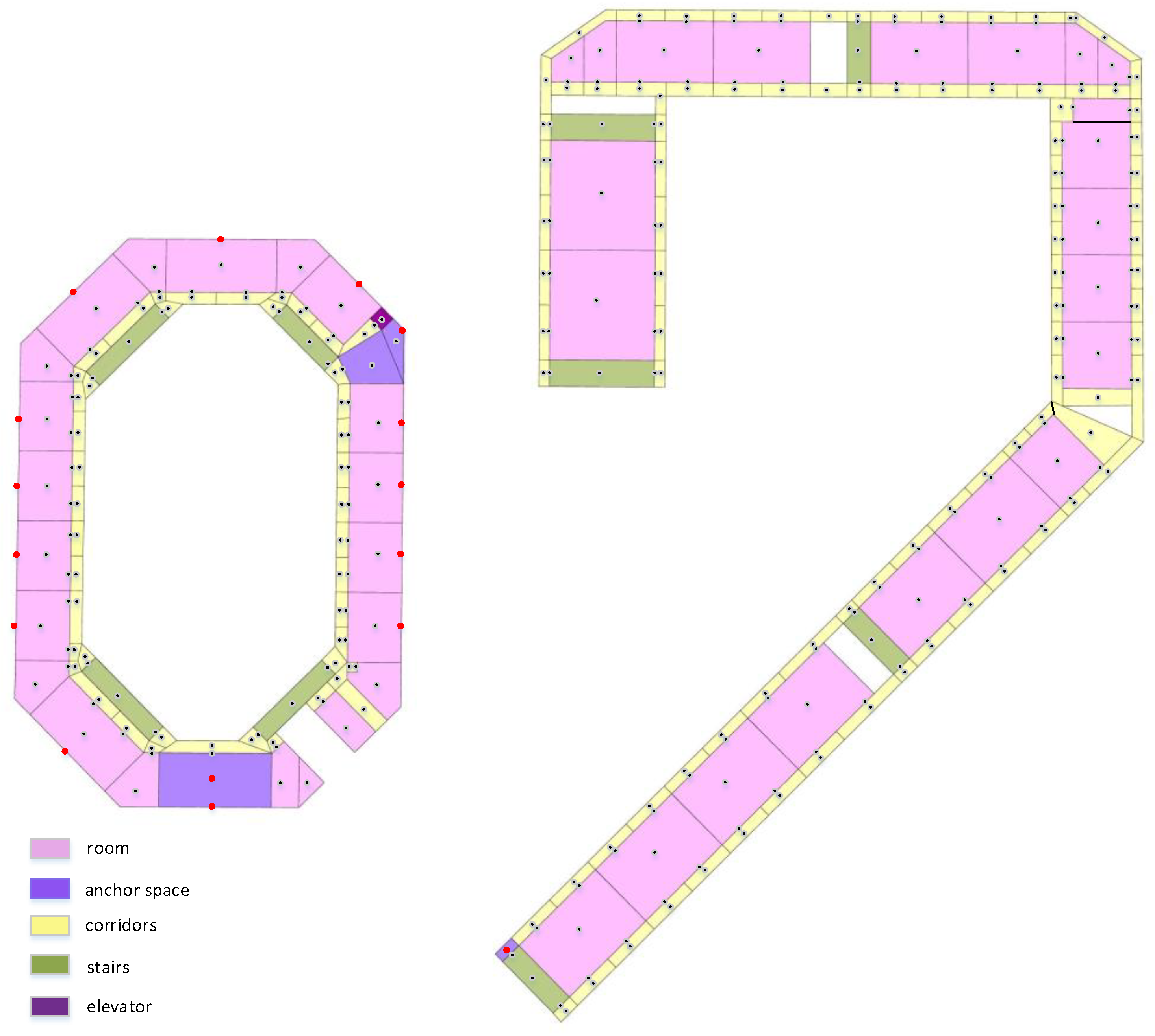
3.1. Indoor 3D Space Model
3.2. Characteristics of Indoor Fires in Buildings
- Fire spreads fast. In the event of a fire, smoke can quickly spread in stairwells, elevators, and other vertical corridors. At this time, fire doors and windows installed in the stairwell or vertical passageway are important fire prevention measures that can prevent the flow of combustion smoke during the fire. Identifying the spatial location of these building facilities can prevent the spread of fire to a certain extent and ensure safe evacuation.
- High hazard. The interior of modern buildings is generally densely populated and complex in spatial structure. Some obstacles are flammable and explosive, which will become very dangerous in the case of a fire. If people are not familiar with the distribution of indoor exits or if emergency evacuation signs are absent in the building, the evacuation difficulty will increase.
- Difficult to fight fire. Fires are known to be quite difficult to fight from the outside. People mainly use indoor fire protection facilities to extinguish fires [28]. If the locations of the firefighting facilities inside a building are unclear, the fire will be uncontrollable.
3.3. Influencing Factors of Routing in An Indoor Fire
- Evacuation components
- Exit and route selection
- Path security
3.4. Extension of Components for Indoor Fire Scenarios
- In terms of indoor components that affect evacuation in indoor fire scenarios, we extend the fireproof door and window components and firefighting facility components. Fireproof doors and windows are building components that can meet the requirements of fire resistance stability, integrity, and heat insulation within a certain time. These include fire-resistant objects with certain fire resistance, which are arranged in a fire-resistant partition room, evacuation stairwells, and vertical shafts. For firefighting facilities, we extend the number of fire extinguishers, smoke prevention and exhaust devices, and fire diversion signs.
- In terms of the emergency exit selection for indoor fire scenarios, we extend the window exit components in the anchor space. The anchor space refers to the exits and entrances that connect the building interior and exterior. Extending the number of window exits in the anchor space can help users to choose a low-floor window or fire ladder to escape in certain circumstances.
- In terms of the path selection of an indoor fire scenario, we extend the elevator, escalator, and staircase components in the vertical passageway to distinguish the vertical reachable path in a fire. Elevators do not work during fires due to the cessation of the power supply. Escalators are generally located in relatively open halls and can objectively play a role in the early fire period. However, for safety reasons, escalators cannot be used as evacuation facilities in accordance with national regulations. Stairs are therefore a relatively safe selection in a vertical passageway.
- In terms of the safety of evacuation in an indoor fire scenario, we extend the flammable and explosive objects and non-flammable object components as obstacles. In the general indoor navigation process, obstacles affect the path planning and complicate the navigation process. The IndoorGML standard classifies obstacles as non-navigational space and does not consider the obstacle characteristics in detail. However, the flammable and explosive characteristics of obstacles must be considered to increase safety during an emergency fire evacuation.
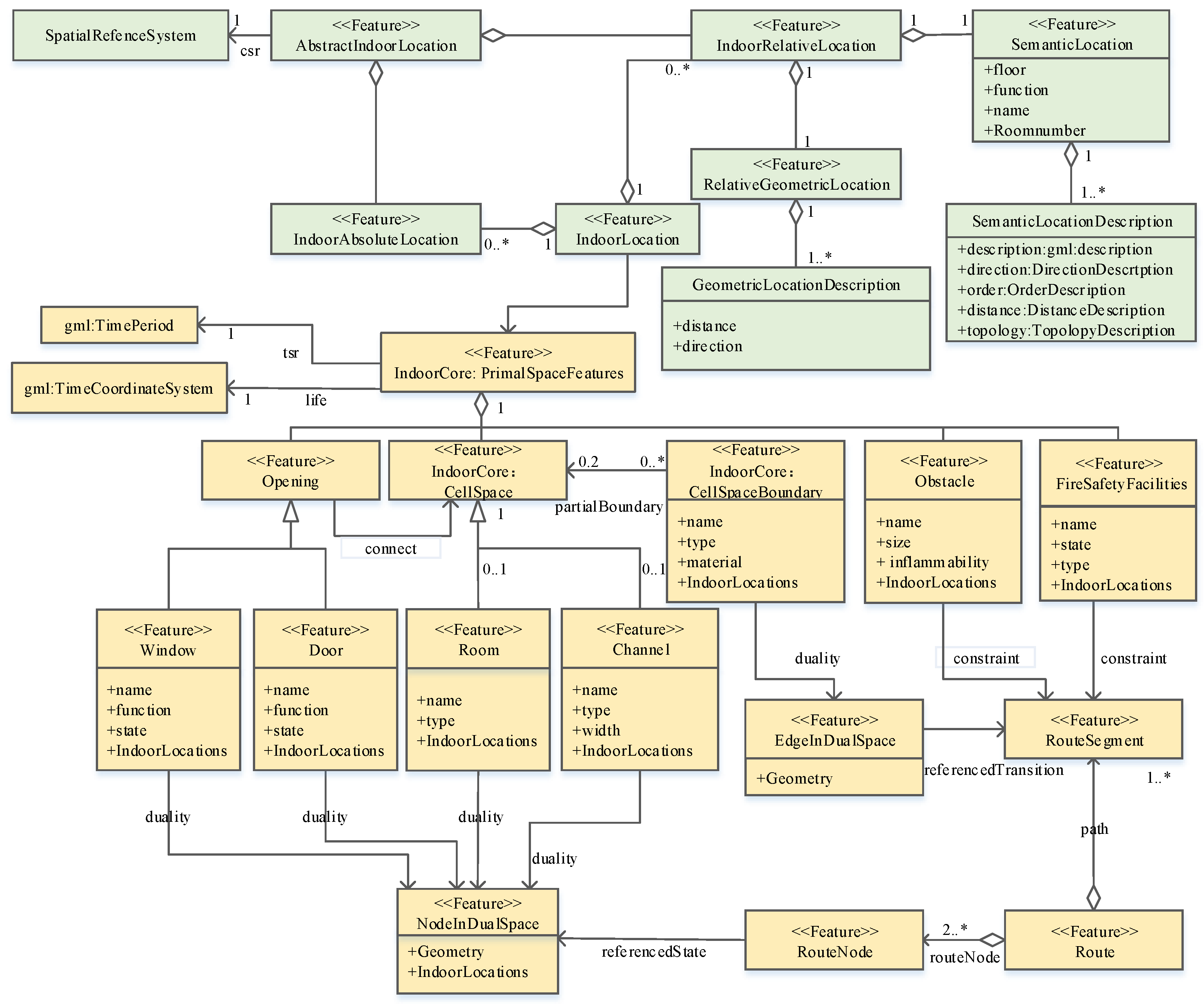
3.5. Location Definition Based on Indoor Location GML
- Opening. The Opening class is inherited from the PrimalSpaceFeatures class and includes the Door class and Window class, which contain four attributes: name, function, accessibility, and IndoorLocations. The name is an xs-type string, namely, a string consisting of numbers and letters. The function is defined by the WindowFunctionType and DoorFunctionType, which include fire doors and windows, anchor doors and windows, and ordinary doors and windows. The state indicates reachability through a Boolean identifier, where 0 indicates that a door or window is impassable and 1 indicates that a door or window is passable. IndoorLocations is associated with indoor location descriptions defined by IndoorLocationGML [27].
- CellSpace. A CellSpace is the IndoorGML core module, which is a semantic class corresponding to one space object in Euclidean space [19]. The CellSpace is inherited from the PrimalSpaceFeatures class, which includes the Room class and Channel class. The Room class contains two attributes: name and IndoorLocations. The Channel class contains four attributes: name, type, width, and IndoorLocations.
- CellSpaceBoundary. A CellSpaceBoundary is also the IndoorGML core module, which is used to semantically describe the boundary of a space object [19]. The CellSpaceBoundary is also inherited from the PrimalSpaceFeatures class and is associated with CellSpace.
- Obstacle. The obstacle is an extension class that includes four attributes: name, size, inflammability, and IndoorLocations.
- FireSafetyFacility. The FireSafetyFacility is an extension class that includes four attributes: name, state, type, and IndoorLocations. The types of fire facilities include FireExtinguisher, FumeExtrator, and EvacuationIndicatingLamps.
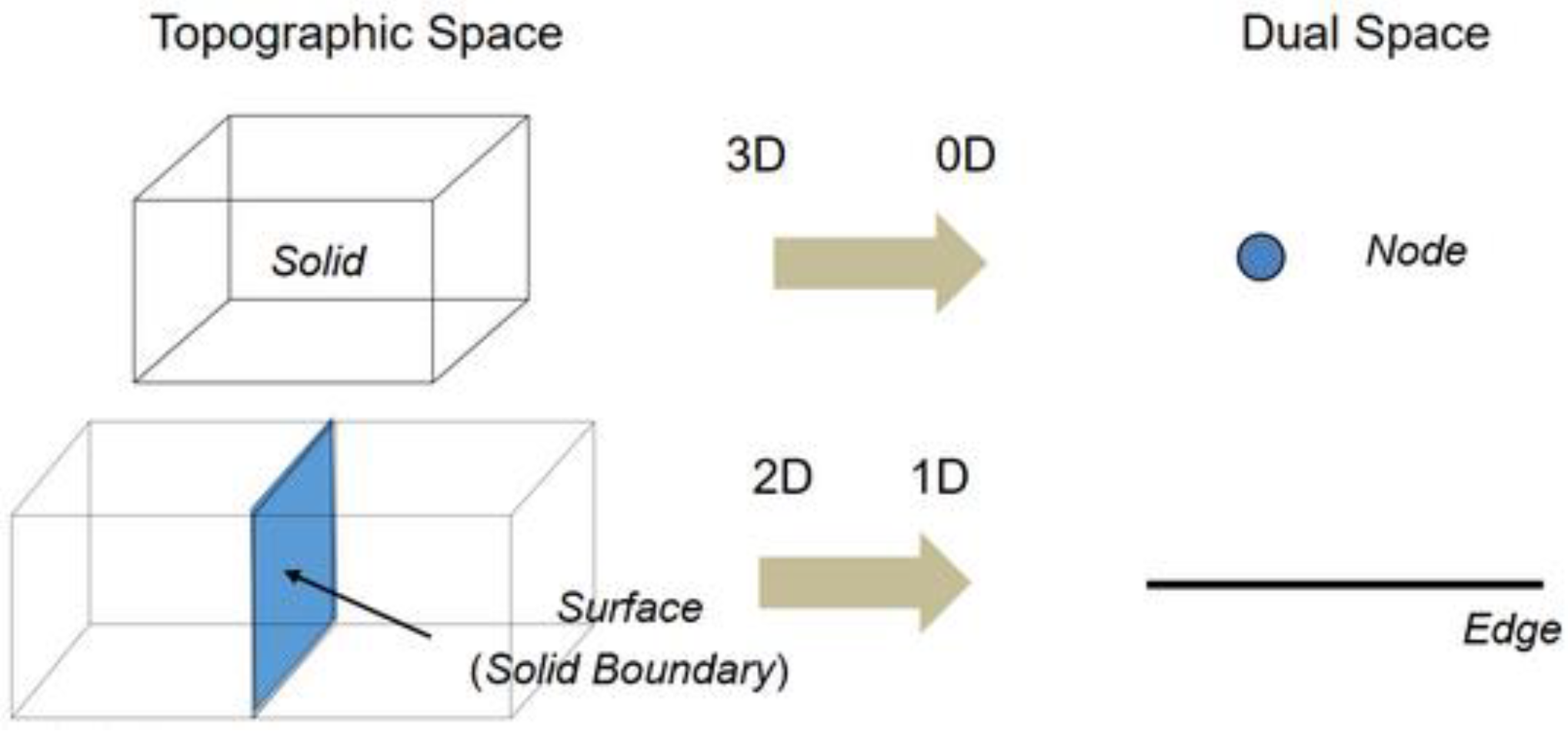
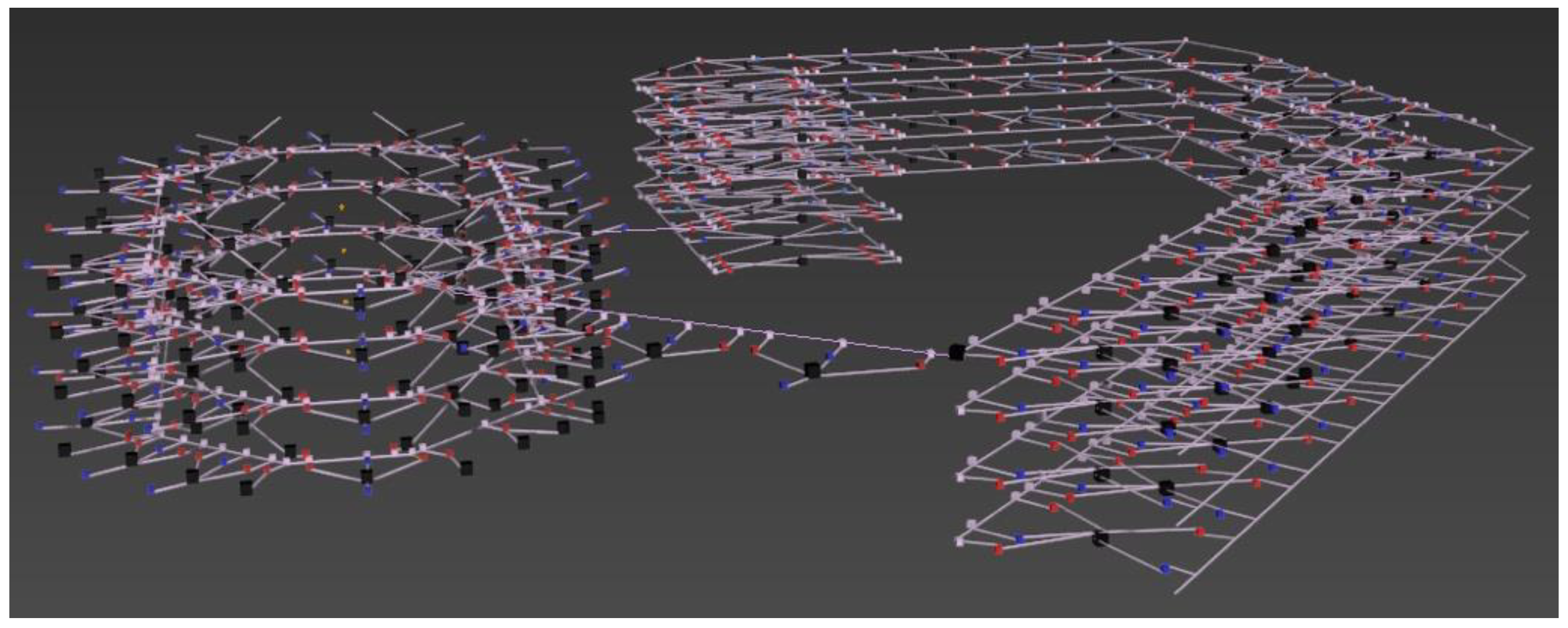
- Dual Space. Through the dual transformation, a k-dimensional object in N-dimensional space can be transformed into a (N-k) dimensional object in dual space. This means that in the corresponding dual space, a 3D cell space (e.g., room) is converted into a zero-dimensional node. A 2D boundary surface (e.g., wall and door) between two units is converted into a 1D edge. In this way, the original space is transformed into a node graph of dual space to express the topological relationship of the indoor road network. Figure 3 shows the example of dual transformation.
- Indoor road network. Based on the room–room model, interior rooms, stairs, elevators, escalators, doors, and windows are implemented as nodes in dual space. We add additional nodes at the connection points of the channel components, as well as door, window, and channel components. The cell space boundary of the corridor and vertical channel is implemented as an edge in dual space. We construct indoor path points and path segments using obstacles and firefighting facilities as semantic constraints. We then obtain a fire-oriented indoor 3D road network model.
4. A Routing Method for Indoor Fire Scenarios
4.1. Semantic Expression of Indoor Routing
4.1.1. Path Accessibility of a Fire Scenario
4.1.2. Path Recognition Degree of a Fire Scenario
4.1.3. Fire Parameters
4.2. 3D Navigation Cost of Indoor Fire Scenarios
4.2.1. Path Accessibility Cost Function
4.2.2. Path Recognition Degree Cost Function
4.2.3. Cost Function of Indoor Fire Parameters
4.2.4. 3D Navigation Cost Function for Indoor Fire Scenarios
4.3. 3D Routing Algorithm for Indoor Fire Scenarios
4.3.1. A* Algorithm
4.3.2. Multi-Semantic Constrained Indoor Routing Algorithm
- Construct a 3D grid structure of vertical passageways and connect each floor by a vertical passageway to form an indoor 3D grid structure for indoor fire scenarios. Elevators and escalators are inaccessible during the emergency evacuation process; thus, people need to choose stairs as the evacuation route.
- Establish a starting point and set of multi-anchor space exit nodes. Determine the location of the starting point of the path search for a fire scenario. Select the nearest node in the indoor road network model as the starting point . Doors and windows are used as anchor space exit nodes to satisfy the emergency evacuation requirements. Given the risk of escape from an anchor space window exit on the second floor and above, only the first-floor door and window exits in the anchor space are added to the multi-anchor space exit point set . The sets and are initialized to store the traversed target point and navigation path from the starting point to the target point.
- Calculate the evaluation function and select the node with the lowest valuation cost between adjacent nodes as the current node. Determine the indoor 3D navigation cost function for fire scenarios accounting for the semantics of indoor routing proposed in this paper. Select the target point in and calculate the Euclidean distance from all adjacent nodes at the current starting point to the target point as the heuristic function . Calculate the evaluation function and select the path adjacent point with the lowest evaluation function value as the current node.
- Determine whether the current node is the target point selected in step (3). If yes, move from the multi-anchor space exit set to the traversed anchor space exit set , add the walk path from its starting point to the current point in the set , and save its navigation cost. Otherwise, return to step (3) and calculate and compare the value of the node valuation function adjacent to the current node.
- Determine whether the set is empty. If the set is not empty, insert a new node in the set as the target point and return to step (3). If the set is empty, this means that all target points in the multi-anchor space exit set have been traversed. Compare the navigation costs of these feasible paths to determine the optimal path. This is satisfied by . Output the selected path information.
- End of the algorithm.
5. Experiments and Discussions
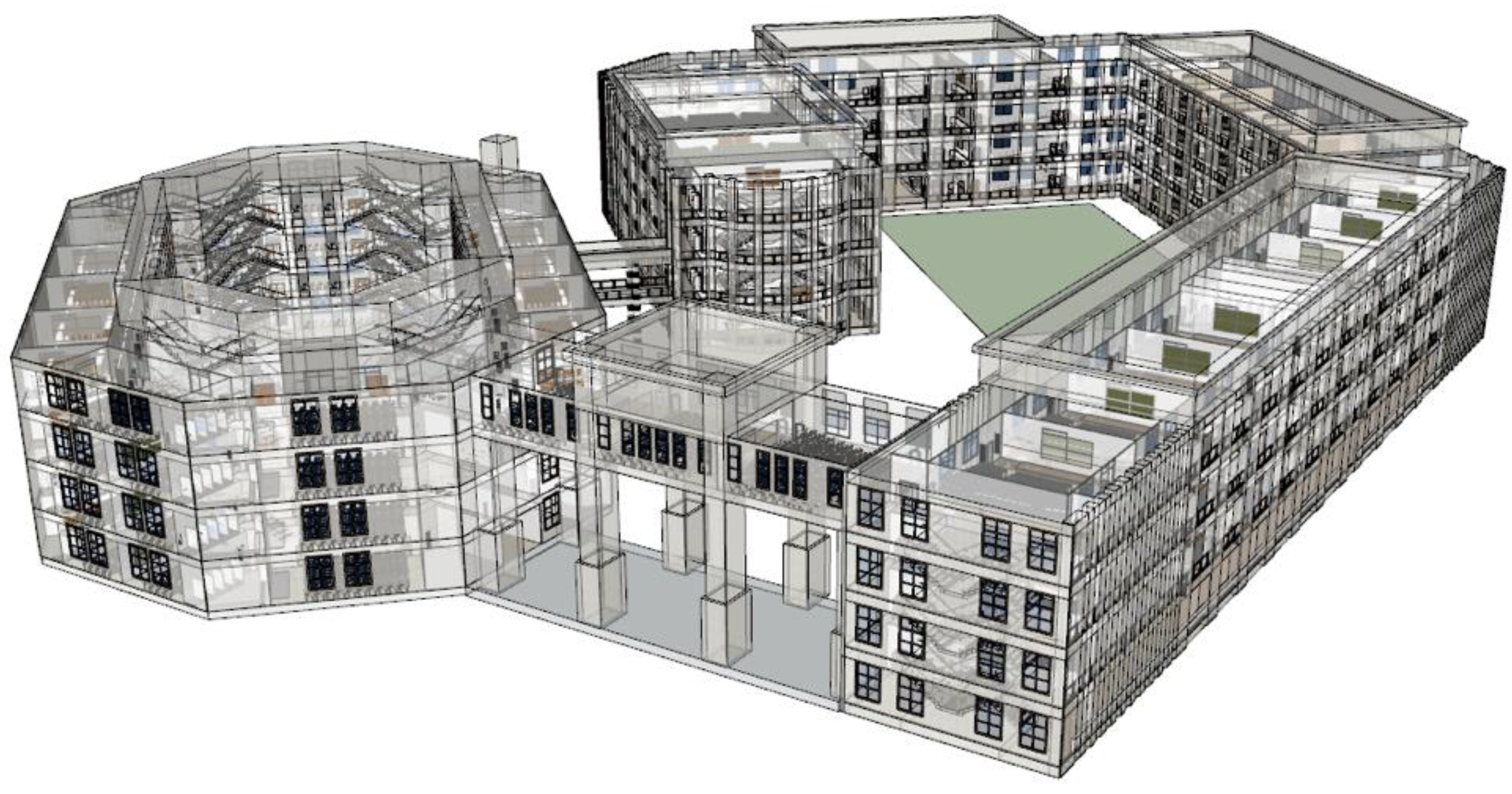
5.1. Construction of An Indoor 3D Expression Model for A Fire Scenario
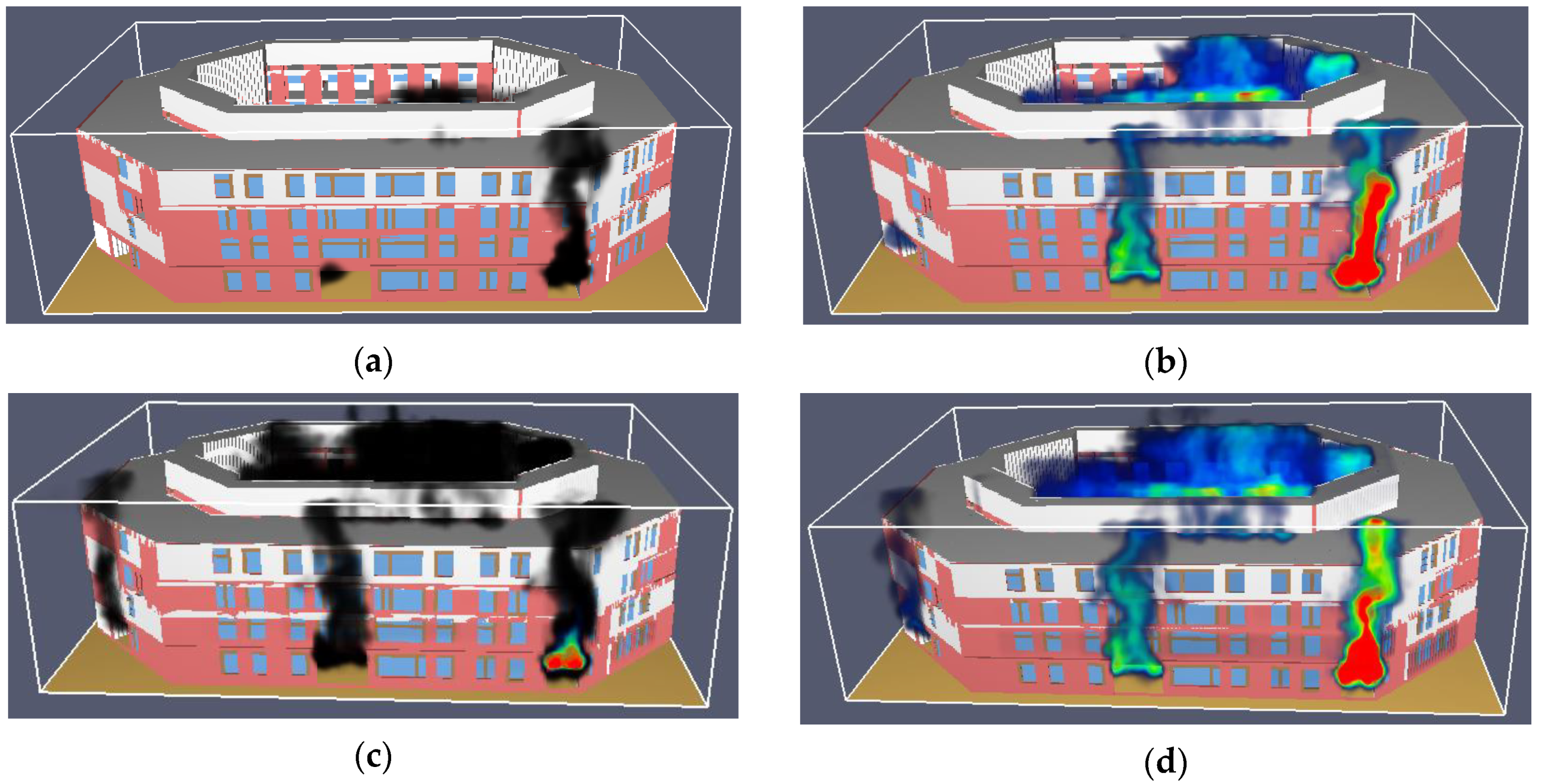
5.2. Fire Simulation
5.3. Results
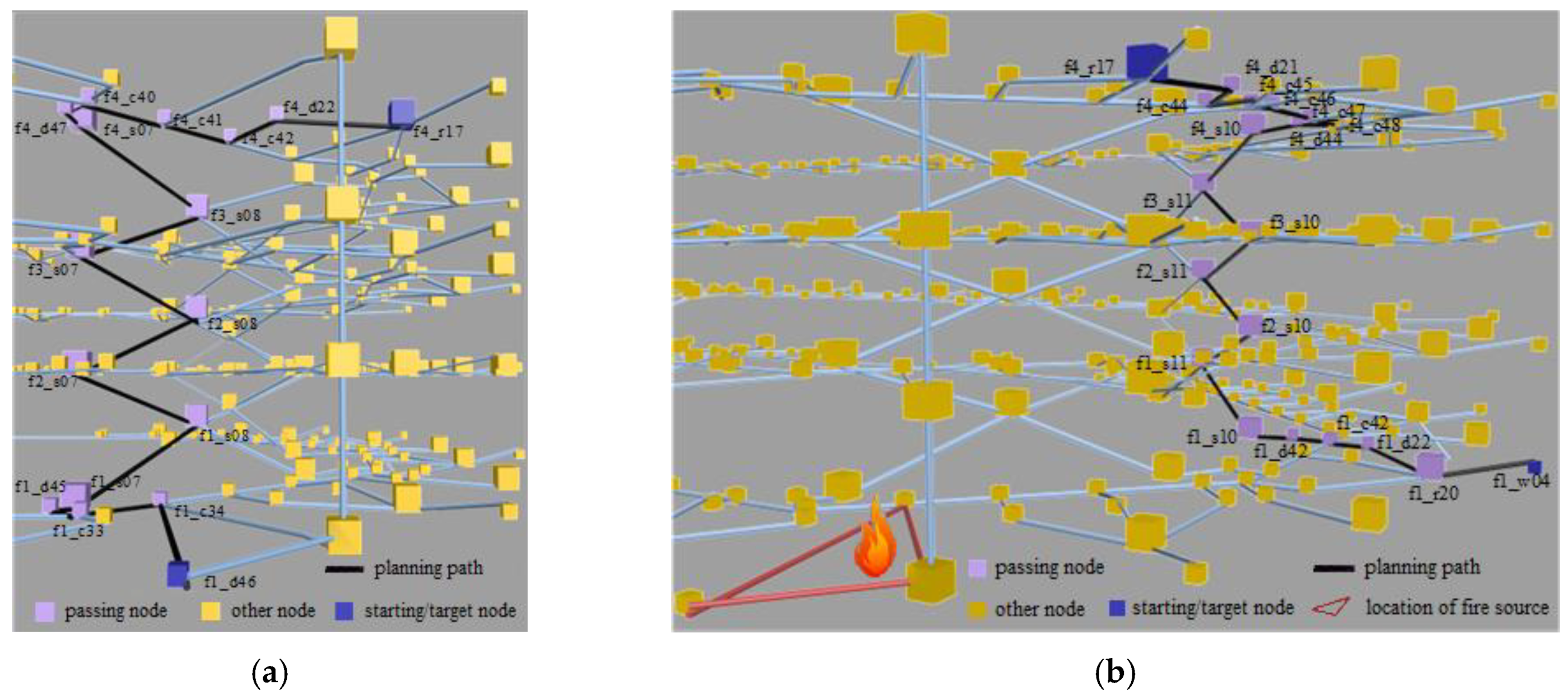
5.3.1. Impact of Path Accessibility on Indoor Routing
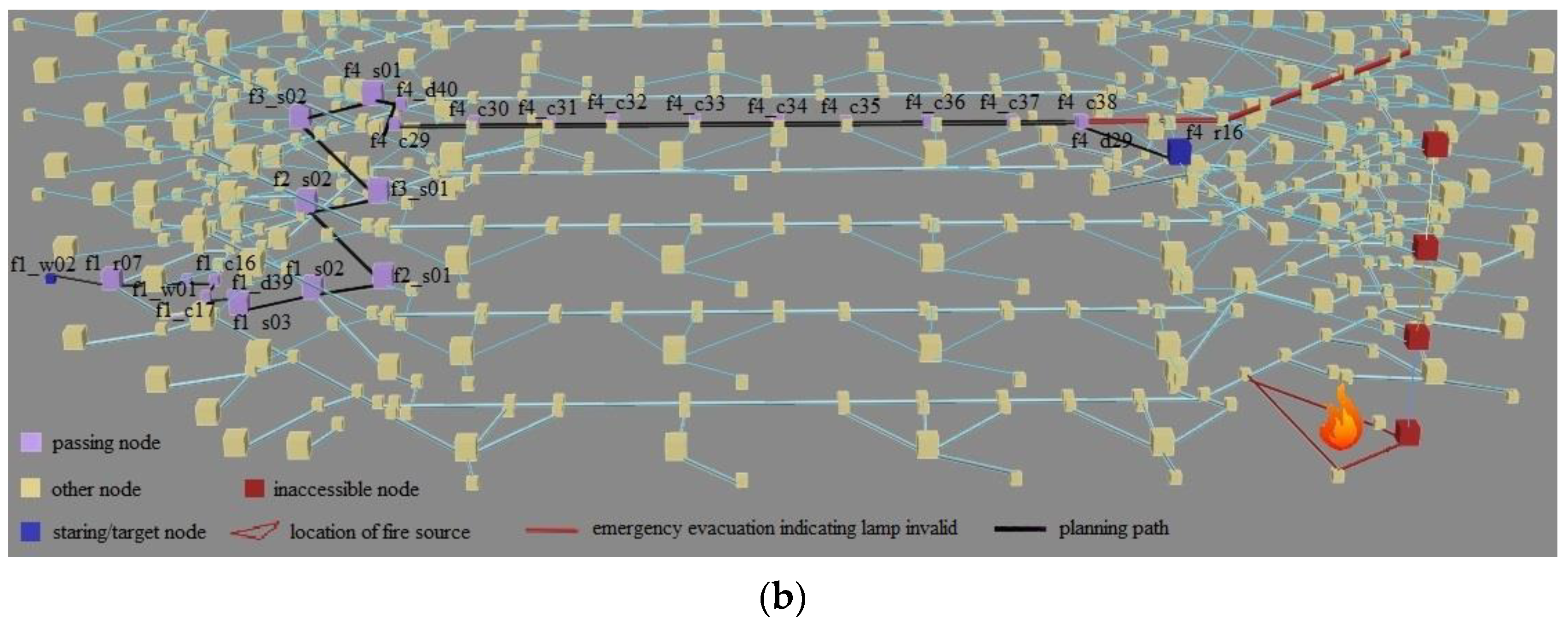
5.3.2. Impact of Path Recognition Degree on Indoor Routing
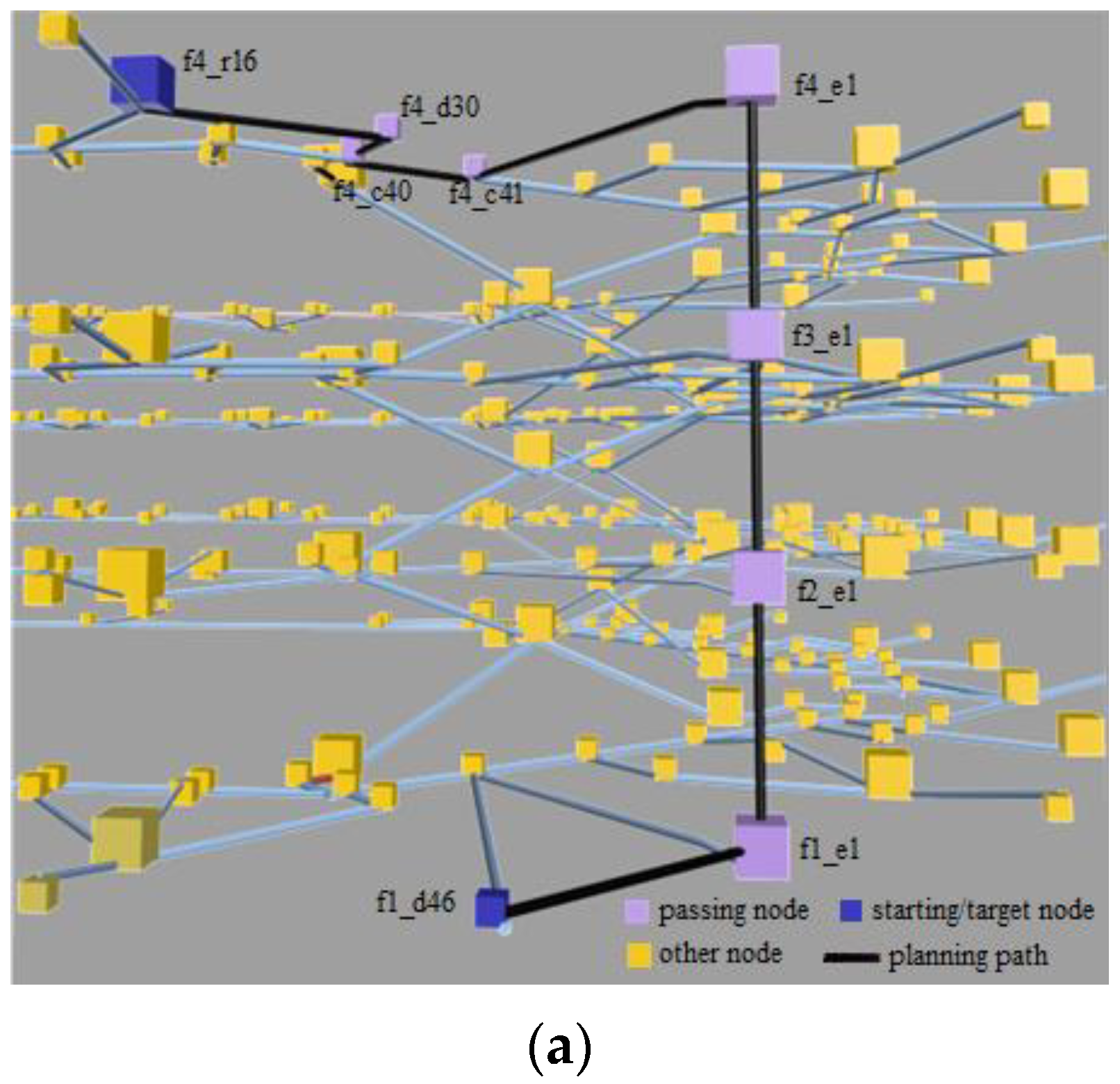
5.3.3. Impact of Fire Parameters on Indoor Path Planning
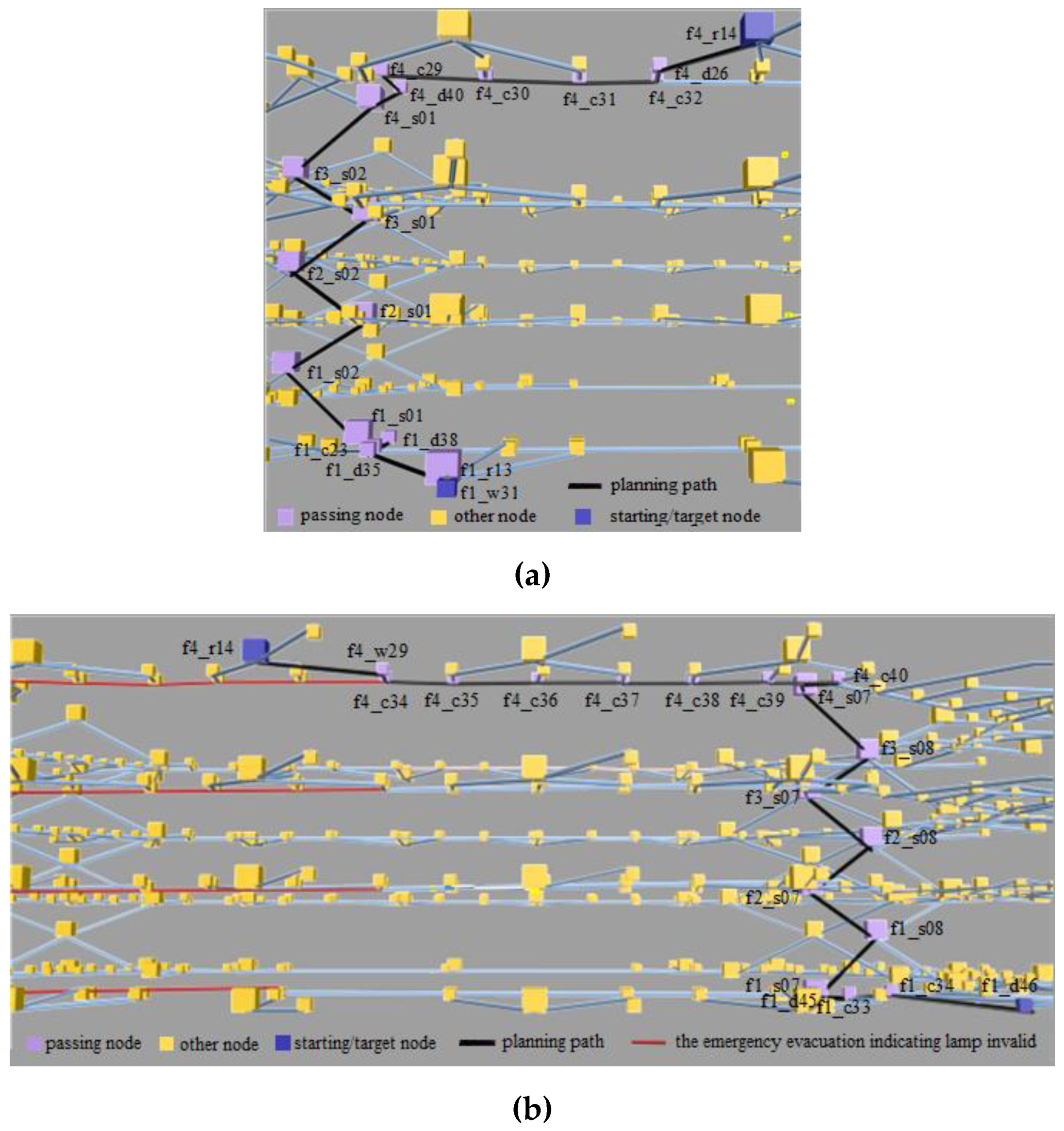
5.3.4. Indoor Routing Constrained by Multi-Semantic Parameters
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, L.; Wang, G.X.; Yuan, T.; Peng, K.M. Research on indoor map. Geo. Spat. Inf. Sci. 2013, 43–47. [Google Scholar] [CrossRef]
- Fu, Z.M. Analysis on the fire data in China for the period between 2003–2012. J. Saf. Environ. 2014, 14, 341–345. [Google Scholar] [CrossRef]
- Becker, T.; Nagel, C.; Kolbe, T.h. A multilayered space-event model for navigation in indoor spaces. In 3D Geo-Information Sciences; Springer Berlin Heidelberg: Berlin, Germany, 2009; pp. 61–77. [Google Scholar]
- Lin, Y.H.; Liu, Y.S.; Gao, G.; Han, X.G.; Lai, C.Y.; Gu, M. The IFC-based path planning for 3D indoor spaces. Adv. Eng. Inf. 2013, 27, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zlatanova, S. A semantic data model for indoor navigation. In Proceedings of the Fourth ACM SIGSPATIAL International Workshop on indoor spatial awareness, Redondo Beach, CA, USA, 6 November 2012; pp. 1–8. [Google Scholar]
- Tsetsos, V.; Anagnostopoulos, C.; Kikiras, P.; Hadjiefthymiades, S. Semantically enriched navigation for indoor environments. Int. J. Web Grid Serv. 2006, 2, 453–478. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.C.; Wen, Z.G.; Zhang, X.Y. Indoor optimal path planning based on Dijkstra Algorithm. In Proceedings of the 2015 International Conference on Materials Engineering and Information Technology Applications (MEITA 2015), Guilin, China, 30–31 August 2015; pp. 309–313. [Google Scholar]
- Lin, D.; Song, G.M.; You, X.; Jia, F.L.; Deng, C. Study on the context-aware indoor path planning. Geo. Spat. Inf. Sci. 2016, 32, 8–13. [Google Scholar] [CrossRef]
- Lyardet, F.; Szeto, D.W.; Aitenbichler, E. Context-aware indoor navigation. In Proceedings of the Lecture Notes in Computer Science, Ambient Intelligence: European Conference, Nuremberg, Germany, 19–22 November 2008; pp. 290–307. [Google Scholar]
- Lee, J.; Kwan, M.P. Spatiotemporal routing analysis for emergency response in indoor space. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2014, 32, 637–650. [Google Scholar] [CrossRef]
- Lu, C.S.; Weng, G.F.; Yang, R.; Shen, S.F.; Yuan, H.Y. Fire evacuation model based on motor schema and cellular automaton. J. Tsinghua Univ. 2007, 47, 2163–2167. [Google Scholar] [CrossRef]
- Niu, L.; Song, Y.Q. A simulation model fusing space and agent for indoor dynamic fire evacuation analysis. Simulation 2016, 92, 215–232. [Google Scholar] [CrossRef]
- Atila, U.; Ortakci, Y.; Ozacar, K.; Demiral, E.; Karas, I.R. SmartEscape: A mobile smart individual fire evacuation system based on 3D spatial model. ISPRS Int. J. Geo-Inf. 2018, 7, 223. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.F.; Wang, S.P. Application of virtual reality technology for emergency evacuation in high-rise buildings. Appl. Mech. Mater. 2012, 204–208, 4941–4945. [Google Scholar] [CrossRef]
- Rüppel, U.; Abolghasemzadeh, P.; Kai, M.s. BIM-based immersive indoor graph networks for emergency situations in buildings. In Proceedings of the Computing in Civil and Building Engineering, Nottingham, UK, 30 June–2 July 2010. [Google Scholar]
- Rüppel, U.; Kai, M.S. BIM-based indoor-emergency-navigation-system for complex buildings. Tsinghua Sci. Technol. 2008, 13, 362–367. [Google Scholar] [CrossRef]
- Wang, B.; Li, H.J.; Rezgui, Y.C.; Bradley, A.; Ong, H.N. BIM-based virtual environment for fire emergency evacuation. Sci. World J. 2014, 589016. [Google Scholar] [CrossRef]
- Li, N.; Burcin, B.G.; Bhaskar, K.; Lucio, S. A BIM centered indoor localization algorithm to support buildingfireemergency response operations. Autom. Constr. 2014, 42, 78–79. [Google Scholar] [CrossRef]
- Lee, J.; Li, K.J.; Zlatanova, S.; Kolbe, T.H.; Nagel, C.; Becker, T. OGC® IndoorGML|OGC. Available online: http://www.opengeospatial.org/standards/indoorgml#downloads (accessed on 3 November 2019).
- Xiong, Q.; Zhu, Q.; Du, Z.Q.; Zhu, X.Y.; Zhang, Y.T.; Niu, L.; Li, Y.; Zhou, Y. A dynamic indoor field model for emergency evacuation simulation. ISPRS Int. J. Geo-Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, Y.; Xiong, Q.; Zlatanova, S.; Ding, Y.L.; Zhang, Y.T.; Zhou, Y. Indoor multi-dimensional location GML and its application for ubiquitous indoor location services. ISPRS Int. J. Geo-Inf. 2016, 5, 220. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zlatanova, S.; Zhu, Q.; Li, K. Towards the integration of IndoorGML and IndoorLocationGML for indoor applications. In Proceedings of the ISPRS Geospatial Week 2017, Wuhan, China, 18–22 September 2017; pp. 343–348. [Google Scholar]
- Alattas, A.; Oosterom, P.V.; Zlatanova, S.; Hoeneveld, D.; Verbree, E. Using the combined LADM-IndoorGML model to support buiilding evacuation. In Proceedings of the ISPRS TC IV Mid-term Symposium “3D Spatial Information Science—The Engine of Change”, Delft, The Netherlands, 1–5 October 2018; pp. 11–23. [Google Scholar]
- Alattas, S.; Zlatanova, S.; Oosterom, P.V.; Chatzinikolaou, E.; Lemmen, C.; Li, K.J. Supporting indoor navigation using access rights to spaces based on combined use of IndoorGML and LADM models. ISPRS Int. J. Geo-Inf. 2017, 6, 384. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zlatanova, S.; Li, B.F.; Oosterom, P.V.; Liu, H.; Barton, J. Indoor routing on logical network using space semantics. ISPRS Int. J. Geo-Inf. 2019, 8, 126. [Google Scholar] [CrossRef] [Green Version]
- Vanlande, R.; Nicolle, C.; Cruz, C. IFC and building lifecycle management. Autom. Constr. 2008, 18, 70–78. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.; Jiang, J.; Long, Y.; Zhou, Y.; Xiong, Q.; Li, B.; Zhang, H.P.; Cha, Z.H.; Zhu, X.Y.; Fu, X.; et al. Indoor Multi-Dimensional Location Information GML: GB/T 35627-2017. Available online: http://c.gb688.cn/bzgk/gb/showGb?type=online&hcno=67E12407FDCC0CFDDAA16721088802A4 (accessed on 5 November 2019).
- Lou, S.L. Discussion of on fire characteristics of the high-rise and prevention measure. Sichuan Build. Sci. 2009, 35.2, 122–126. [Google Scholar] [CrossRef]
- Clemens, P. Geography Markup Language (GML) Encoding Standard, OGC. 2016. Available online: https://www.ogc.org/standards/gml (accessed on 5 November 2019).
- Kang, H.K.; Li, K.J. A standard indoor spatial data model—OGC IndoorGML and implementation approaches. ISPRS Int. J. Geo-Inf. 2017, 6, 116. [Google Scholar] [CrossRef]
- May, A.; Tracy, R.; Bayer, S.; Tarkiainen, M. Pedestrian navigation aids: Information requirements and design implications. Pers. Ubiquitous Comput. 2003, 7, 331–338. [Google Scholar] [CrossRef]
- Ding, Y.L.; He, X.B.; Zhu, Q.; Lin, J.; Hu, M.Y. A dynamic optimization method of indoor fire evacuation route based on real-time situation awareness. Acta Geod. Cartogr. Sin. 2013, 45, 1464–1475. [Google Scholar] [CrossRef]
- Zou, Z.C. Large-Scale Public Building Fire Evacuation Environmental Risks Measurement and Navagation Paths Optimization. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2009. [Google Scholar]
- Niu, L.; Li, X.X. The spatial influence of fire spreading on indoor egress route planning. Fire Sci. Technol. 2016, 4, 492–496. [Google Scholar] [CrossRef]
- Christina, G.; Alexander, S.; Arne, M.; Christine, M. Micro crack detection with Dijkstra’s shortest path algorithm. Mach. Vision Appl. 2011, 23, 589–601. [Google Scholar] [CrossRef]
- Li, R. Utilizing restricted direction strategy and binary heap technology to optimize dijkstra algorithm in WebGIS. Key Eng. Mater. 2010, 419–420, 557–560. [Google Scholar] [CrossRef]
- Qian, H.S.; Ge, W.F.; Zhong, M.; Ge, M. Application of improved A* algorithm based on hierarchy for route planning. Comput. Eng. Appl. 2014, 7, 225–229. [Google Scholar]
- Zhan, W.W.; Wang, W.; Chen, N.C.; Wang, C. Path planning strategies for UAV based on improved A algorithm. Geomat. Inf. Sci. Wuhan Univ. 2015, 3, 315–320. [Google Scholar] [CrossRef]
- Jukna, S.; Schnitger, G. On the optimality of Bellman–Ford–Moore shortest path algorithm. Theor. Comput. Sci. 2016, 628, 101–109. [Google Scholar] [CrossRef]
- Wei, D.C. Implementation of route selection function based on improved Floyd algorithm. In Proceedings of the 2010 WASE International Conference on Information Engineering, Beidaihe, China, 14–15 August 2010; pp. 223–227. [Google Scholar]
- Zuo, X.F.; Shen, W.J. Improved algorithm about muti-shortest path problem based on Floyd algorithm. Comput. Sci. 2017, 44, 232–234. [Google Scholar]
- Duan, F.D. A faster algorithm for shortest-ptath—SPFA. J. Southwest Jiaotong Univ. 1994, 2, 207–213. [Google Scholar]
- Xia, Z.D.; Bu, T.M.; Zhang, J.Y. Analysis and improvement of SPFA algorithm. Comput. Sci. 2014, 41, 180–184. [Google Scholar] [CrossRef]
- Hart, P.; Nilsson, N.; Raphael, B. Correction to “a formal basis for the heuristic determination of minimum cost paths”. ACM SIGART Bull. 1972, 37, 28–29. [Google Scholar] [CrossRef]
- Chabini, I.; Lan, S. Adaptations of the A* algorithm for the computation of fastest paths in deterministic discrete-time dynamic networks. IEEE Trans. Intell. Transp. Syst. 2002, 3, 60–74. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vetax | Vetax_State | Conditions |
|---|---|---|
| Ordinary door | Reachable | Unlocked |
| Unreachable | Locked | |
| Fire door | Reachable | Open |
| Unreachable | Closed | |
| Ordinary window | Reachable | Unlocked and the size and height are sufficient for people to pass |
| Unreachable | Locked and the size and height are insufficient for people to pass | |
| Fire window | Reachable | Open |
| Unreachable | Closed | |
| Anchor space door | Reachable | Unlocked |
| Unreachable | Locked | |
| Anchor space window | Reachable | Unlocked and located on the first floor |
| Unreachable | Locked and located on the second floor and above | |
| Stairs | Reachable | Unlocked |
| Unreachable | Locked | |
| Elevator | unreachable | fire occurs |
| Escalator | unreachable | fire occurs |
| Temperature Range (°C) | <42 | 42–50 | 50–80 | >80 |
|---|---|---|---|---|
| Levels of danger | Safe | Potential danger | Danger | High danger |
| Location | Small Space | Large Space |
|---|---|---|
| Visibility threshold (m) | 5 | 10 |
| Visibility Interval (m) | >10 | 5–10 | <5 |
|---|---|---|---|
| Level of danger | Safe | Potential danger | High danger |
| Scenario Number | Fire | Start Node | Unreachable Node | Obstacle |
|---|---|---|---|---|
| 1 | Yes | f4_r17 | No | No |
| 2 | No | f4_r17 | f4_d22 | f1_c34 to f1_d46 |
| Scenario Number | Fire | Start Node | Emergency Evacuation Indicating Lamp |
|---|---|---|---|
| 1 | Yes | f4_r17 | No |
| 2 | Yes | f4_r17 | f4_c27 to f4_c34 |
| Scenario Number | Fire | Start Node | Fire Parameters |
|---|---|---|---|
| 1 | Yes | f4_r17 | No |
| 2 | Yes | f4_r17 | f4_c27 to f4_c34 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Pang, Y.; Chen, F.; Zhang, Y. Three-Dimensional Indoor Fire Evacuation Routing. ISPRS Int. J. Geo-Inf. 2020, 9, 558. https://doi.org/10.3390/ijgi9100558
Zhou Y, Pang Y, Chen F, Zhang Y. Three-Dimensional Indoor Fire Evacuation Routing. ISPRS International Journal of Geo-Information. 2020; 9(10):558. https://doi.org/10.3390/ijgi9100558
Chicago/Turabian StyleZhou, Yan, Yuling Pang, Fen Chen, and Yeting Zhang. 2020. "Three-Dimensional Indoor Fire Evacuation Routing" ISPRS International Journal of Geo-Information 9, no. 10: 558. https://doi.org/10.3390/ijgi9100558
APA StyleZhou, Y., Pang, Y., Chen, F., & Zhang, Y. (2020). Three-Dimensional Indoor Fire Evacuation Routing. ISPRS International Journal of Geo-Information, 9(10), 558. https://doi.org/10.3390/ijgi9100558