Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices




Abstract
:1. Introduction
1.1. Unmanned Aerial Vehicles (UAVs) and Structure from Motion (SfM) Approaches
1.2. Georeferencing Issues in UAVs Photogrammetric Pipeline
1.3. Interior Orientation Parameters (IOP) Estimation and Its Relation with Georeferencing Approaches
1.4. Direct Georeferencing Approaches
1.5. Aims and Structure of the Research
2. Materials and Methods
2.1. Preliminary Experiences
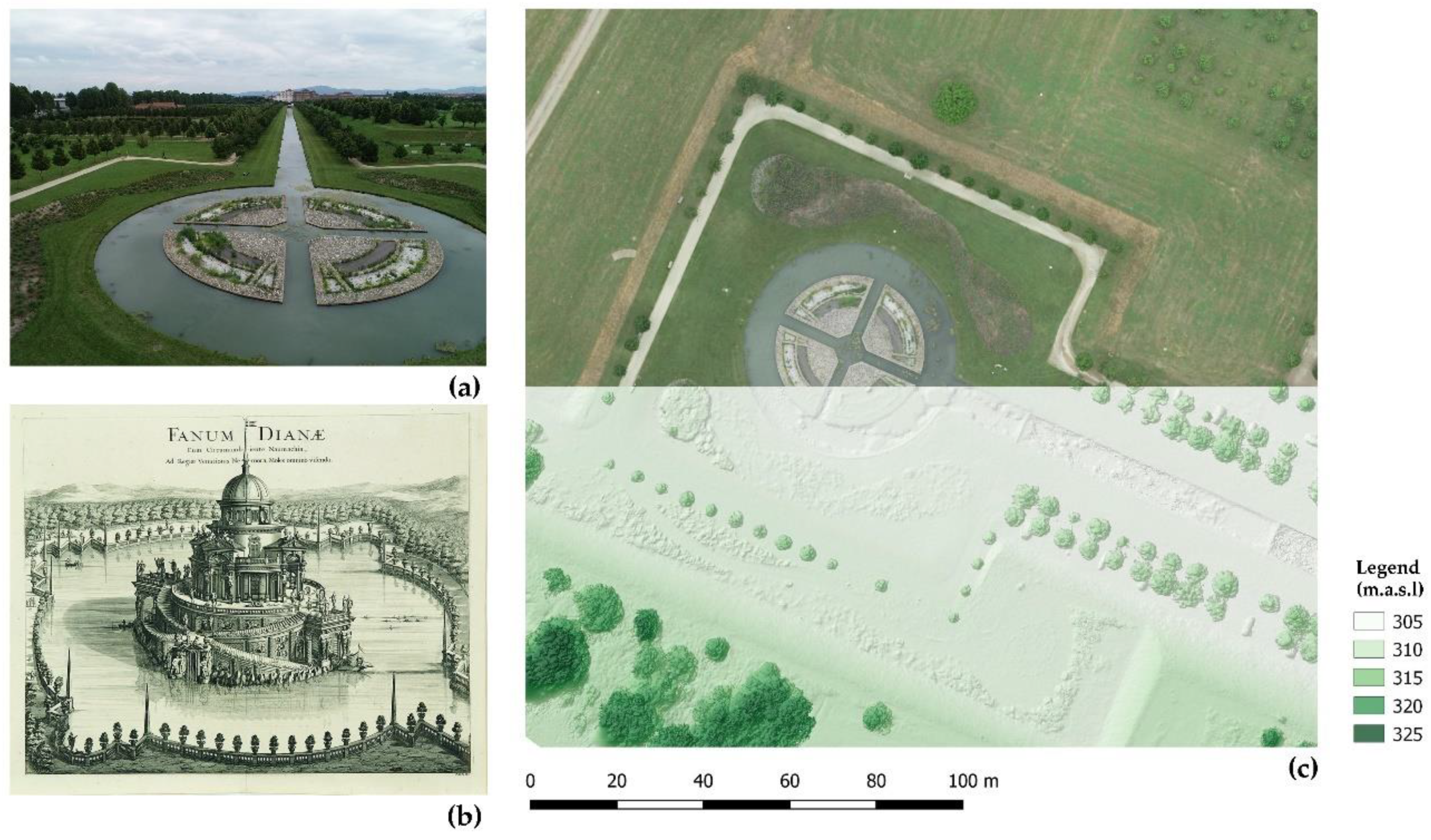
2.2. The Deployed Platform and the Test Site
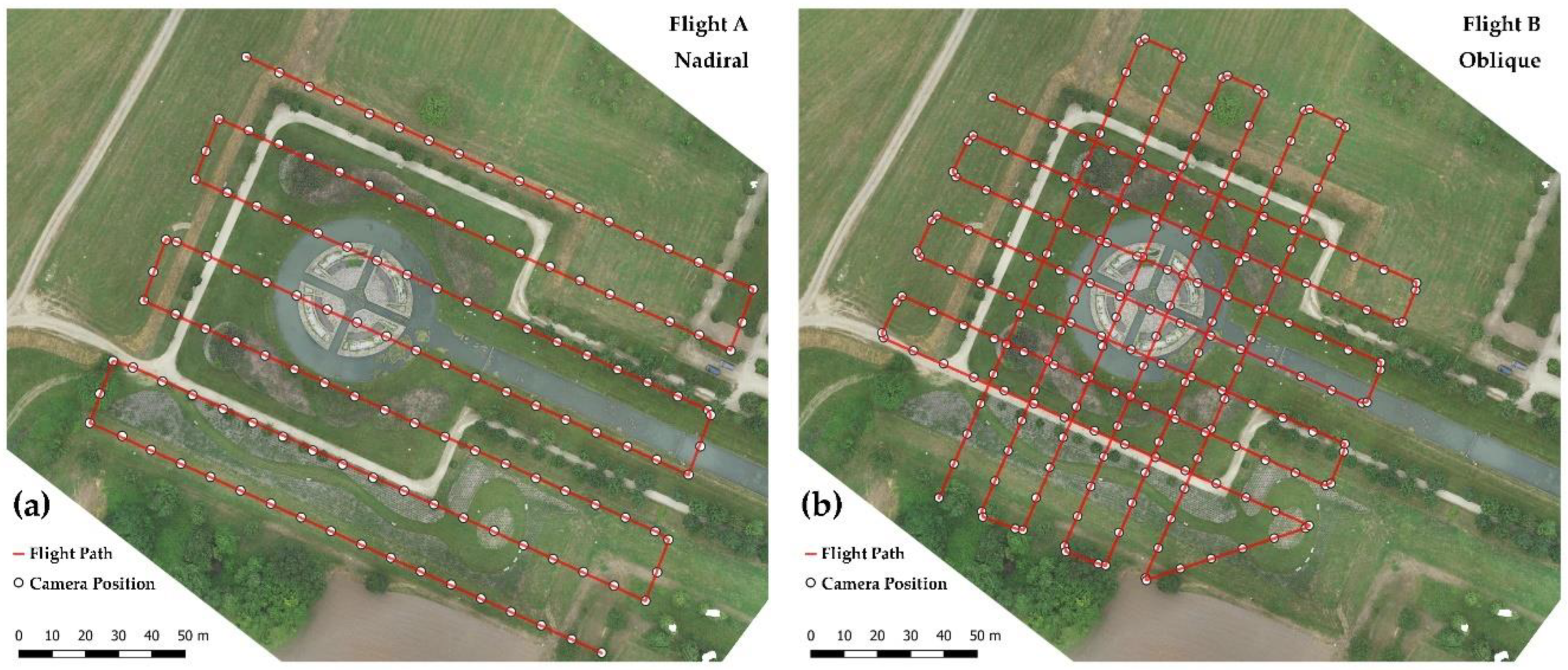
2.3. Flight Plan and Image Acquisition Strategies
2.4. Positioning Solutions Adopted during the Flight Tests
2.5. IOP Estimation, Camera Calibration, and Ground Control Points (GCPs)
2.6. Processing of the Acquired Datasets Following Different Strategies
2.6.1. Post Processed Kinematik (PPK)
2.6.2. Real Time Kinematik (RTK): Network Real Time Kinematik (NRTK) and DJI-Real Time Kinematik (DRTK)
3. Results
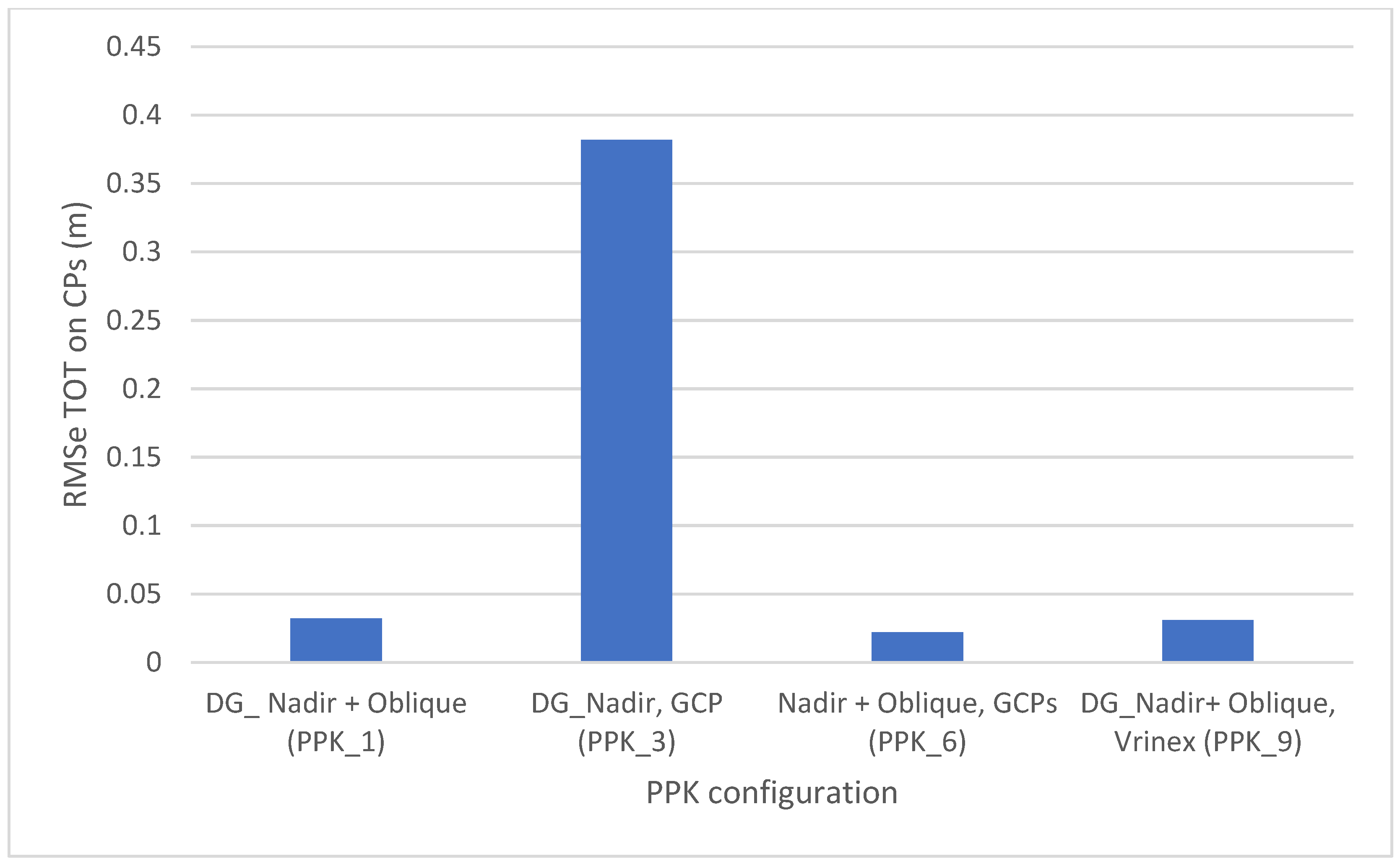
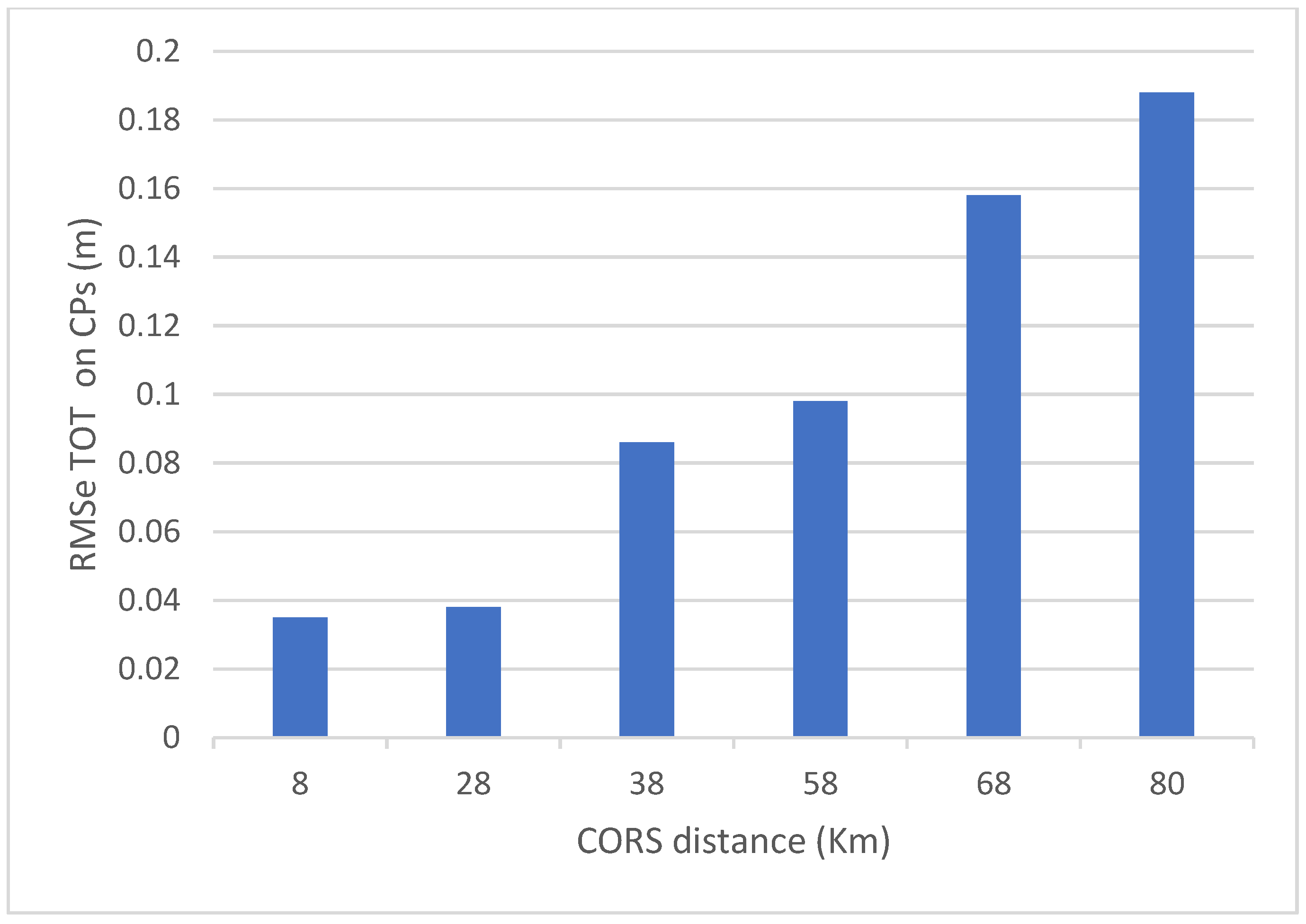
3.1. PPK
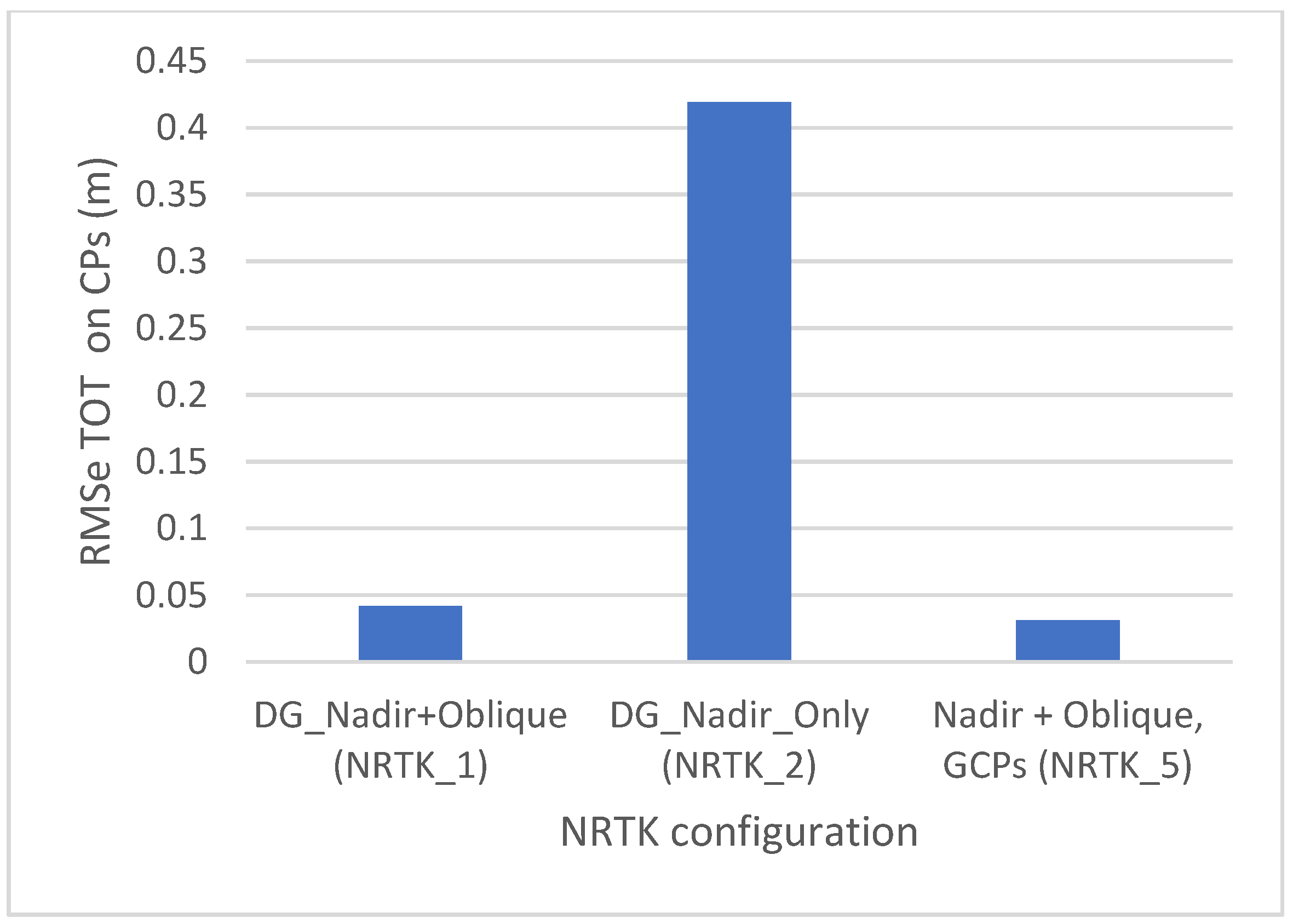
3.2. NRTK
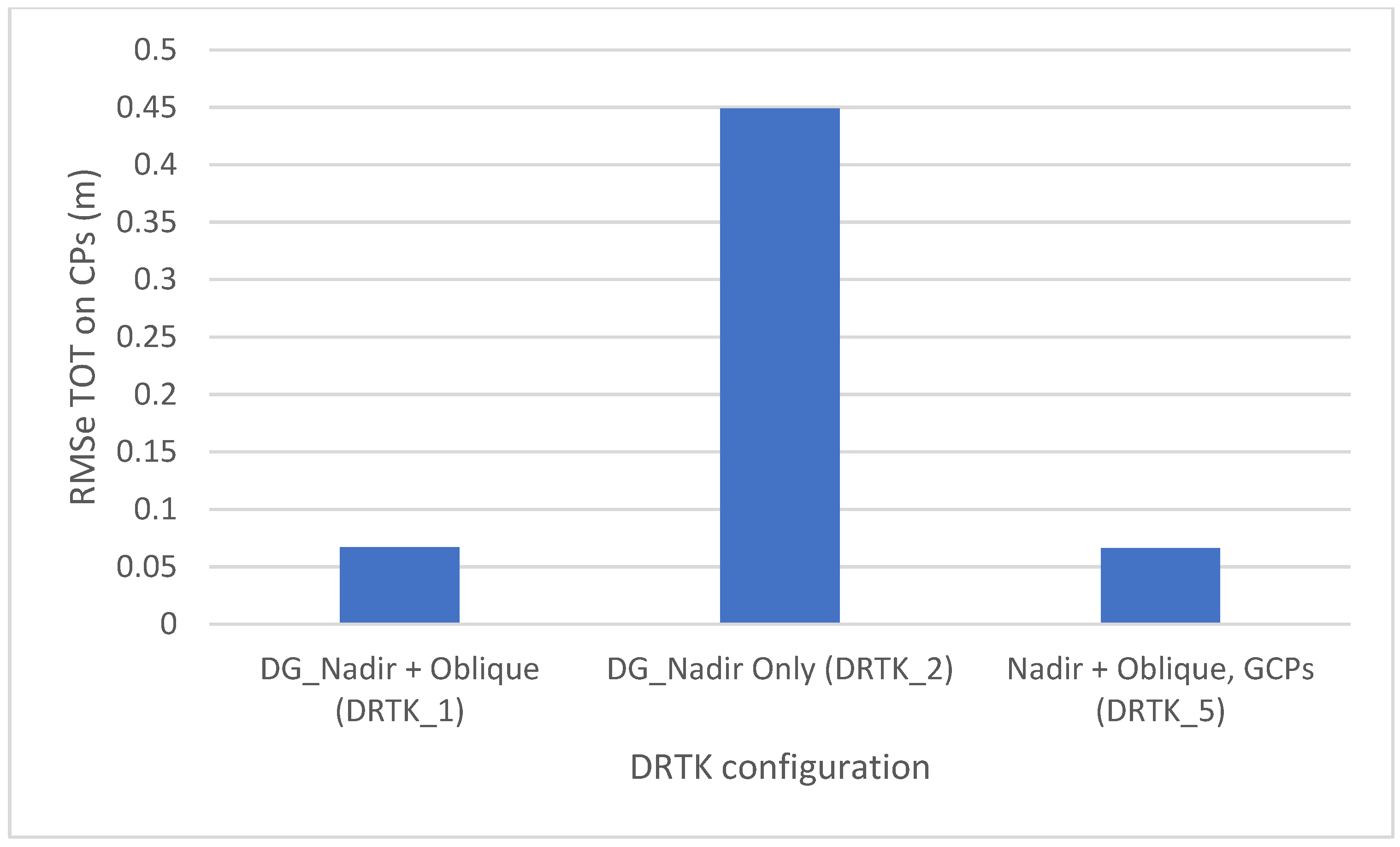
3.3. DRTK
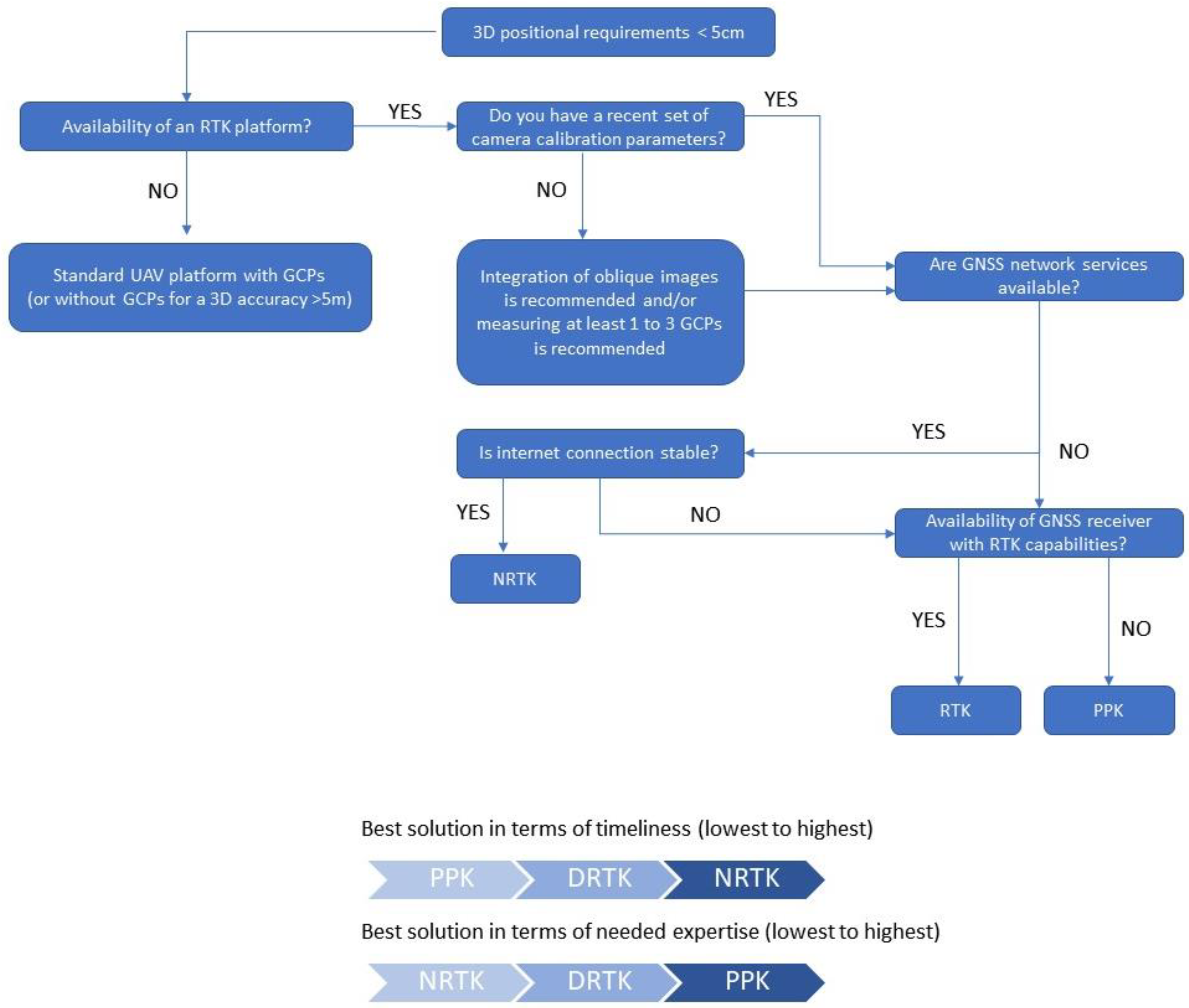
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Zhou, M.; Li, D.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Improved estimation of rice aboveground biomass combining textural and spectral analysis of UAV imagery. Precis. Agric. 2019, 20, 611–629. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Aimonino, D.R.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Aicardi, I.; Nex, F.; Gerke, M.; Lingua, A. An Image-Based Approach for the Co-Registration of Multi-Temporal UAV Image Datasets. Remote Sens. 2016, 8, 779. [Google Scholar] [CrossRef] [Green Version]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Hassaan, O.; Nasir, A.K.; Roth, H.; Khan, M.F. Precision Forestry: Trees Counting in Urban Areas Using Visible Imagery based on an Unmanned Aerial Vehicle. IFAC-PapersOnLine 2016, 49, 16–21. [Google Scholar] [CrossRef]
- Grznárová, A.; Mokroš, M.; Surový, P.; Slavík, M.; Pondelík, M.; Merganič, J. The Crown Diameter Estimation from Fixed Wing Type of Uav Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Campana, S. Drones in Archaeology. State-of-the-Art and Future Perspectives. Archaeol. Prospect. 2017, 24, 275–296. [Google Scholar] [CrossRef]
- Stek, T.D. Drones over Mediterranean landscapes. The potential of small UAV’s (drones) for site detection and heritage management in archaeological survey projects: A case study from Le Pianelle in the Tappino Valley, Molise (Italy). J. Cult. Herit. 2016, 22, 1066–1071. [Google Scholar] [CrossRef]
- Georgopoulos, A.; Oikonomou, C.; Adamopoulos, E.; Stathopoulou, E.K. Evaluating unmanned aerial platforms for cultural heritage large scale mapping. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 355–362. [Google Scholar] [CrossRef]
- de Reu, J.; Trachet, J.; Laloo, P.; de Clercq, W. From Low Cost UAV Survey to High Resolution Topographic Data: Developing Our Understanding of a Medieval Outport of Bruges. Archaeol. Prospect. 2016, 23, 335–346. [Google Scholar] [CrossRef]
- Adami, A.; Fregonese, L.; Gallo, M.; Helder, J.; Pepe, M.; Treccani, D. Ultra Light Uav Systems for the Metrical Documentation of Cultural Heritage: Applications for Architecture and Archaeology. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 15–21. [Google Scholar] [CrossRef] [Green Version]
- Murtiyoso, A.; Grussenmeyer, P.; Freville, T. Close range uav accurate recording and modeling of St-Pierre-Le-Jeune Neo-Romanesque church in Strasbourg (France). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, 42, 519–526. [Google Scholar] [CrossRef] [Green Version]
- Bolognesi, M.; Furini, A.; Russo, V.; Pellegrinelli, A.; Russo, P. Testing the low-cost rpas potential in 3D cultural heritage reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2015, 40, 229–235. [Google Scholar] [CrossRef] [Green Version]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Toro, F.G.; Tsourdos, A. UAV Sensors for Environmental Monitoring; MDPI AG—Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2018. [Google Scholar]
- Tripolitsiotis, A.; Prokas, N.; Kyritsis, S.; Dollas, A.; Papaefstathiou, I.; Partsinevelos, P. Dronesourcing: A modular, expandable multi-sensor UAV platform for combined, real-time environmental monitoring. Int. J. Remote Sens. 2017, 38, 2757–2770. [Google Scholar] [CrossRef]
- Green, D.R.; Hagon, J.J.; Gómez, C.; Gregory, B.J. Using low-cost UAVs for environmental monitoring, mapping, and modelling: Examples from the coastal zone. In Coastal Management: Global Challenges and Innovations; Elsevier: Amsterdam, The Netherlands, 2018; pp. 465–501. [Google Scholar]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]
- Duarte, D.; Nex, F.; Kerle, N.; Vosselman, G. Towards a more efficient detection of earthquake induced façade damages using oblique UAV imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, 42, 93–100. [Google Scholar] [CrossRef] [Green Version]
- Boccardo, P.; Chiabrando, F.; Dutto, F.; Tonolo, F.; Lingua, A. UAV Deployment Exercise for Mapping Purposes: Evaluation of Emergency Response Applications. Sensors 2015, 15, 15717–15737. [Google Scholar] [CrossRef] [Green Version]
- Sutheerakul, C.; Kronprasert, N.; Kaewmoracharoen, M.; Pichayapan, P. Application of Unmanned Aerial Vehicles to Pedestrian Traffic Monitoring and Management for Shopping Streets. Transp. Res. Procedia 2017, 25, 1717–1734. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Tang, J.; Pan, Z.; Wang, Y. Real-Time Traffic Flow Parameter Estimation From UAV Video Based on Ensemble Classifier and Optical Flow. IEEE Trans. Intell. Transp. Syst. 2018, 20, 54–64. [Google Scholar] [CrossRef]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef] [Green Version]
- Morgenthal, G.; Hallermann, N. Quality Assessment of Unmanned Aerial Vehicle (UAV) Based Visual Inspection of Structures. Adv. Struct. Eng. 2016, 17, 289–302. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Giones, F.; Brem, A. From toys to tools: The co-evolution of technological and entrepreneurial developments in the drone industry. Bus. Horiz. 2017, 60, 875–884. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Regolamento, E.N. Mezzi Aerei A Pilotaggio Remoto, Edizione 3 del 11 novembre 2019. 2019. Available online: https://www.enac.gov.it/news/regolamento-mezzi-aerei-pilotaggio-remoto-ed-3-dell11-novembre-2019 (accessed on 30 September 2020).
- Peppa, M.V.; Hall, J.; Goodyear, J.; Mills, J.P. Photogrammetric assessment and comparison of dji phantom 4 pro and phantom 4 rtk small unmanned aircraft systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 503–509. [Google Scholar] [CrossRef] [Green Version]
- Palanirajan, H.K.; Alsadik, B.; Nex, F.; Elberink, S.O. Efficient flight planning for building façade 3D reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 495–502. [Google Scholar] [CrossRef] [Green Version]
- Hernandez-Lopez, D.; Felipe-Garcia, B.; Gonzalez-Aguilera, D.; Arias-Perez, B. An Automatic Approach to UAV Flight Planning and Control for Photogrammetric Applications. Photogramm. Eng. Remote Sens. 2013, 79, 87–98. [Google Scholar] [CrossRef]
- Aicardi, I.; Chiabrando, F.; Grasso, N.; Lingua, A.; Noardo, F.; Spanò, A.T. UAV photogrammetry with oblique images: First analysis on data acquisition and processing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 835–842. [Google Scholar] [CrossRef]
- Bolkas, D. Assessment of GCP Number and Separation Distance for Small UAS Surveys with and without GNSS-PPK Positioning. J. Surv. Eng. 2019, 145, 1–17. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef] [Green Version]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Meas. J. Int. Meas. Confed. 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Toth, C.; Jozkow, G.; Grejner-Brzezinska, D. Mapping with Small UAS: A Point Cloud Accuracy Assessment. J. Appl. Geod. 2015, 9, 213–226. [Google Scholar] [CrossRef]
- Gašparovic, M.; Gajski, D. Two-step camera calibration method developed for micro UAV’S. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 829–833. [Google Scholar] [CrossRef]
- Yusoff, A.R.; Ariff, M.F.M.; Idris, K.M.; Majid, Z.; Chong, A.K. Camera calibration accuracy at different UAV flying heights. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, 42, 595–600. [Google Scholar] [CrossRef] [Green Version]
- Skarlatos, D.; Procopiou, E.; Stavrou, G.; Gregoriou, M. Accuracy assessment of minimum control points for UAV photography and georeferencing. In First International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2013); International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8795, p. 879514. [Google Scholar]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Automated co-registration and calibration in SfM photogrammetry for landslide change detection. Earth Surf. Process. Landf. 2019, 44, 287–303. [Google Scholar] [CrossRef] [Green Version]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Cucci, D.A.; Rehak, M.; Skaloud, J. Bundle adjustment with raw inertial observations in UAV applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 1–12. [Google Scholar] [CrossRef]
- Gabrlik, P.; la Cour-Harbo, A.; Kalvodova, P.; Zalud, L.; Janata, P. Calibration and accuracy assessment in a direct georeferencing system for UAS photogrammetry. Int. J. Remote Sens. 2018, 39, 4931–4959. [Google Scholar] [CrossRef] [Green Version]
- Brown, D. Decentering Distortion of Lenses. Photom. Eng. 1966, 32, 444–462. [Google Scholar]
- Brown, D. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Fraser, C. Digital camera self-calibration. ISPRS J. Photogramm. Remote Sens. 1997, 52, 149–159. [Google Scholar] [CrossRef]
- McGlone, R.; Mikhail, J.; Bethel, E.; Mullen, J. Manual of photogrammetry. In Photogrammetric Engineering and Remote Sensing; American Society for Photogrammetry and Remote Sensing: 425 Barlow Place, Bethesda: Rockville, MD, USA, 2004; Volume 79, p. 397. [Google Scholar]
- Gneeniss, A.S.; Mills, J.P.; Miller, P.E. In-flight photogrammetric camera calibration and validation via complementary lidar. ISPRS J. Photogramm. Remote Sens. 2015, 100, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Honkavaara, E. In-Flight Camera Calibration For Direct Georeferencing Abstract: R. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 2004, 166–172. [Google Scholar]
- Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 11933–11953. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Aldana-jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure-from-motion (SfM) photogrammetry and surface change detection. Earth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef] [Green Version]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-Time Single-Frequency GPS/MEMS-IMU Attitude Determination of Lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef] [Green Version]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality assessment of combined IMU/GNSS data for direct georeferencing in the context of UAV-based mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, 42, 355–361. [Google Scholar] [CrossRef] [Green Version]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef] [Green Version]
- Gabrlik, P. The use of direct georeferencing in aerial photogrammetry with micro UAV. IFAC-PapersOnLine 2015, 28, 380–385. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef] [Green Version]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef] [Green Version]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo-Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef] [Green Version]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the georeferencing accuracy of a photogrammetric model using a quadrocopter with onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar]
- Chiabrando, F.; Tonolo, F.G.; Lingua, A. Uav direct georeferencing approach in an emergency mapping context. the 2016 central Italy earthquake case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 247–253. [Google Scholar] [CrossRef] [Green Version]
- Losè, L.T.; Chiabrando, F.; Tonolo, F.G. Are Measured Ground Control Points Still Required in Uav Based Large Scale Mapping? Assessing the Positional Accuracy of an Rtk Multi-Rotor Platform. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2020, XLIII-B1-2, 507–514. [Google Scholar]
- Phantom 4 RTK User Manual, v2.2; DJI: Shenzhen, China, 2020.
- D-RTK 2 User Guide; DJI: Shenzhen, China, 2020.
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using dji phantom 4 rtk drone for topographic mapping of coastal areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 625–630. [Google Scholar] [CrossRef] [Green Version]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal Mapping Using DJI Phantom 4 RTK in Post-Processing Kinematic Mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Li, J.; Wang, L.; Shi, Y. Positioning accuracy assessment of a commercial RTK UAS. In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping V; International Society for Optics and Photonics: Florida, FL, USA, 2020; Volume 1141409, p. 8. [Google Scholar]
- Cornaglia, P. Il Tempio di Diana: Giardini Italiani e Confronti Europei. 2010, pp. 247–264. Available online: https://www.torrossa.com/it/resources/an/4479316 (accessed on 30 September 2020).
- Forlani, G.; Asta, E.D.; Diotri, F.; Morra, U.; Id, R.R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Ćwiąkała, P. Testing Procedure of Unmanned Aerial Vehicles (UAVs) Trajectory in Automatic Missions. Appl. Sci. 2019, 9, 3488. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Raw GNSS (m) | PPK (m) | ||||||
|---|---|---|---|---|---|---|---|
| Mean | StDev | RMSE | Mean | StDev | RMSE | ||
| DG 0 GCPs 31 CPs | X | −1.103 | ±0.108 | 1.108 | −0.006 | ±0.028 | 0.029 |
| Y | −0.844 | ±0.130 | 0.853 | 0.014 | ±0.014 | 0.020 | |
| Z | −3.917 | ±0.468 | 3.945 | −0.082 | ±0.030 | 0.087 | |
| 5 GCPs 26 CPs | X | 0.003 | ±0.031 | 0.031 | 0.002 | ±0.026 | 0.026 |
| Y | 0.003 | ±0.016 | 0.017 | −0.003 | ±0.013 | 0.013 | |
| Z | 0.002 | ±0.070 | 0.069 | 0.008 | ±0.025 | 0.026 | |
| 13 GCPs 18 CPs | X | 0.005 | ±0.024 | 0.025 | 0.000 | ±0.002 | 0.002 |
| Y | 0.000 | ±0.012 | 0.012 | 0.000 | ±0.001 | 0.001 | |
| Z | −0.003 | ±0.032 | 0.032 | 0.000 | ±0.003 | 0.003 | |
| ΔX (m) | ΔY (m) | ΔZ (m) | ||
|---|---|---|---|---|
| PPK. 0 GCPs, 17 CPs | Mean | 0.002 | −0.006 | 0.727 |
| StDev | ±0.033 | ±0.031 | ±0.108 | |
| PPK. 1 GCPs, 16 CPs | Mean | −0.003 | 0.002 | −0.023 |
| StDev | ±0.017 | ±0.019 | ±0.031 | |
| NRTK. 0 GCPs, 17 CPs | Mean | 0.054 | 0.017 | −0.068 |
| StDev | ±0.063 | ±0.035 | ±0.039 |
| Platform main characteristics | |||||
| Weight | 1391 g | Diagonal Distance | 350 mm | Max Flight Time | ≈30 min |
| Camera main characteristics | |||||
| Sensor | 1″ CMOS 20 MP | Lens Field of View | 84° | Focal Length | 8.8 mm/24 mm 1 |
| Gimbal stabilization | 3-axis (tilt, roll, yaw) | Gimbal pitch | −90° to +30° | ||
| GNSS main characteristics | |||||
| GNSS constellation 2 | GPS, GLONASS, Galileo | GNSS frequency | GPS:L1/L2 GLONASS:L1/L2 Galileo:E1/E5a | Positioning accuracy | Vertical 1.5 cm+1 ppm; Horizontal 1 cm+1 ppm |
| D-RTK 2 Main Characteristics | |||
|---|---|---|---|
| GNSS frequency | GPS: L1 C/A, L2, L5 BEIDOU: B1, B2, B3 GLONASS: F1, F2 Galileo: E1, E5A, E5B | Positioning Update Rate | 1 Hz, 2 Hz, 5 Hz, 10 Hz, and 20 Hz |
| Positioning Accuracy (Single Point) | Horizontal:1.5 m Vertical:3.0 m | Positioning Accuracy (RTK) | Horizontal: 1 cm + 1 ppm Vertical: 2 cm + 1 ppm |
| ID | Altitude | Overlap | Camera Orientation | No. of Images | Flight Speed |
|---|---|---|---|---|---|
| Flight A (grid) | 60 m | 75% Front, 70% Lateral | Nadiral | 136 | 2.5 m/s |
| Flight B (double grid) | 60 m | 80% Front, 75% Lateral | 45° | 229 | 3 m/s |
| Flight ID 1 | Positioning Solution |
|---|---|
| Flight 1 | Standalone (Position acquired only by the onboard GNSS receiver) |
| Flight 2 | NRTK (Position refined in real-time through the correction obtained via NTRIP) |
| Flight 3 | (D)RTK (Position refined thanks to the corrections sent by a GNSS master station in the field, the D-RTK 2 receiver set on a point of known coordinates in this specific case) |
| IOP | DJI Pre-Calibration (Not Used) | PC_1_Caluso Self-Calibration | PC_1_Error on Estimation of Parameters | PC_2_Venaria Self-Calibration | PC_2_Error on Estimation of Parameters |
|---|---|---|---|---|---|
| F [pixel] | 3635.190 | 3620.157 | 0.35 | 3627.406 | 0.048 |
| k1 | −0.264 | −0.266 | / | −0.266 | / |
| k2 | 0.111 | 0.114 | / | 0.108 | / |
| k3 | −0.038 | −0.043 | / | -0.031 | / |
| k4 | 0.000 | 0.008 | / | 0.000 | / |
| cx [pixel] | 2.480 | −4.262 | 0.016 | −4.468 | 0.016 |
| cy [pixel] | 9.690 | 6.526 | 0.012 | 6.362 | 0.03 |
| p1 | 0.000 | −0.001 | / | −0.001 | / |
| p2 | −0.001 | 0.000 | / | −0.001 | / |
| b1 | 0.000 | −0.350 | / | −0.099 | / |
| b2 | 0.000 | 0.311 | / | −0.035 | / |
| ID | Flight Plan 1 | Flight ID | Base Station | Base Station Distance | No. of GCPs | No. of CPs | Camera Calibration 2 |
|---|---|---|---|---|---|---|---|
| PPK_1 | A + B | Flight 1 | V2000 | <1 Km | 0 | 13 | SC |
| PPK_2 | A | Flight 1 | V2000 | <1 Km | 0 | 13 | SC |
| PPK_3 | A | Flight 1 | V2000 | <1 Km | 1 | 12 | SC |
| PPK_4 | A | Flight 1 | V2000 | <1 Km | 3 | 10 | SC |
| PPK_5 | A + B | Flight 1 | V2000 | <1 Km | 1 | 12 | SC |
| PPK_6 | A + B | Flight 1 | V2000 | <1 Km | 3 | 10 | SC |
| PPK_7 | A | Flight 1 | V2000 | <1 Km | 0 | 13 | PC_1 |
| PPK_8 | A | Flight 1 | V2000 | <1 Km | 0 | 13 | PC_2 |
| PPK_9 | A + B | Flight 1 | V_RINEX | <1 Km | 0 | 13 | SC |
| PPK_10 | A + B | Flight 1 | CORS | ≈8 Km | 0 | 13 | SC |
| PPK_11 | A + B | Flight 1 | CORS | ≈28 Km | 0 | 13 | SC |
| PPK_12 | A + B | Flight 1 | CORS | ≈38 Km | 0 | 13 | SC |
| PPK_13 | A + B | Flight 1 | CORS | ≈58 Km | 0 | 13 | SC |
| PPK_14 | A + B | Flight 1 | CORS | ≈68 Km | 0 | 13 | SC |
| PPK_15 | A + B | Flight 1 | CORS | ≈80 Km | 0 | 13 | SC |
| ID | Flight Plan 1 | Flight ID | No. of GCPs | No. of CPs | Camera Calibration 2 |
|---|---|---|---|---|---|
| NRTK_1 | A + B | Flight 2 | 0 | 13 | SC |
| NRTK_2 | A | Flight 2 | 0 | 13 | SC |
| NRTK_3 | A + B | Flight 2 | 1 | 12 | SC |
| NRTK_4 | A | Flight 2 | 1 | 12 | SC |
| NRTK_5 | A + B | Flight 2 | 3 | 10 | SC |
| NRTK_6 | A | Flight 2 | 3 | 10 | SC |
| DRTK_1 | A + B | Flight 3 | 0 | 13 | SC |
| DRTK_2 | A | Flight 3 | 0 | 13 | SC |
| DRTK_3 | A + B | Flight 3 | 1 | 12 | SC |
| DRTK_4 | A | Flight 3 | 1 | 12 | SC |
| DRTK_5 | A + B | Flight 3 | 3 | 10 | SC |
| DRTK_6 | A | Flight 3 | 3 | 10 | SC |
| ID | Flight Plan 1 | RMSEE X (m) | RMSE Y (m) | RMSE Z (m) | RMSE TOT (m) | No. of GCPs | No. of CPs | Camera Calibration 2 |
|---|---|---|---|---|---|---|---|---|
| PPK_1 | A + B | 0.012 | 0.009 | 0.028 | 0.032 | 0 | 13 | SC |
| PPK_2 | A | 0.319 | 0.296 | 2.988 | 3.019 | 0 | 13 | SC |
| PPK_3 | A | 0.197 | 0.169 | 0.280 | 0.382 | 1 | 12 | SC |
| PPK_4 | A | 0.012 | 0.009 | 0.142 | 0.143 | 3 | 10 | SC |
| PPK_5 | A + B | 0.006 | 0.009 | 0.032 | 0.034 | 1 | 12 | SC |
| PPK_6 | A + B | 0.007 | 0.009 | 0.019 | 0.022 | 3 | 10 | SC |
| PPK_7 | A | 0.114 | 0.113 | 0.117 | 0.199 | 0 | 13 | PC_1 |
| PPK_8 | A | 0.081 | 0.076 | 0.118 | 0.162 | 0 | 13 | PC_2 |
| PPK_9 | A + B | 0.012 | 0.014 | 0.025 | 0.031 | 0 | 13 | SC |
| IOP | PPK_1 | PPK_2 (no GCPs) | PPK_3 (1 GCP) | PPK_4 (3 GCPs) |
|---|---|---|---|---|
| f | 3627.483 | 3417.831 | 3609.374 | 3592.392 |
| k1 | −0.266 | −0.233 | −0.261 | −0.260 |
| k2 | 0.108 | 0.084 | 0.105 | 0.104 |
| k3 | −0.031 | −0.021 | −0.030 | −0.029 |
| k4 | 0.000 | 0.000 | 0.000 | 0.000 |
| cx | −4.449 | −12.515 | −11.837 | −11.893 |
| cy | 6.310 | 3.260 | 4.827 | 4.694 |
| p1 | −0.001 | 0.000 | 0.000 | 0.000 |
| p2 | 0.000 | 0.000 | 0.000 | 0.000 |
| b1 | −0.110 | 0.029 | 0.070 | 0.065 |
| b2 | −0.035 | 0.299 | 0.346 | 0.329 |
| ID | Flight Plan 1 | RMSE X (m) | RMSE Y (m) | RMSE Z (m) | RMSE TOT (m) | Base Station | Base Station Distance |
|---|---|---|---|---|---|---|---|
| PPK_10 | A + B | 0.010 | 0.026 | 0.021 | 0.035 | CORS_TORINO | ≈8 Km |
| PPK_11 | A + B | 0.017 | 0.012 | 0.032 | 0.038 | CORS_CUORGNE’ | ≈28 Km |
| PPK_12 | A + B | 0.023 | 0.025 | 0.079 | 0.086 | CORS CRESCENTINO | ≈38 Km |
| PPK_13 | A + B | 0.015 | 0.012 | 0.097 | 0.098 | CORS_BIELLA | ≈58 Km |
| PPK_14 | A + B | 0.013 | 0.020 | 0.156 | 0.158 | CORS_CANELLI | ≈68 Km |
| PPK_15 | A + B | 0.029 | 0.023 | 0.184 | 0.188 | CORS_ALESSANDRIA | ≈80 Km |
| ID | Flight Plan 1 | RMSE X (m) | RMSE Y( m) | RMSE Z (m) | RMSE TOT (m) | No. of GCPs | No. of CPs |
|---|---|---|---|---|---|---|---|
| NRTK_1 | A + B | 0.011 | 0.009 | 0.040 | 0.042 | 0 | 13 |
| NRTK_2 | A | 0.026 | 0.016 | 0.418 | 0.419 | 0 | 13 |
| NRTK_3 | A + B | 0.014 | 0.010 | 0.034 | 0.038 | 1 | 12 |
| NRTK_4 | A | 0.020 | 0.012 | 0.021 | 0.031 | 1 | 12 |
| NRTK_5 | A + B | 0.007 | 0.008 | 0.029 | 0.031 | 3 | 10 |
| NRTK_6 | A | 0.016 | 0.010 | 0.022 | 0.029 | 3 | 10 |
| ID | Flight Plan 1 | RMSE X (m) | RMSE Y (m) | RMSE Z (m) | RMSE TOT (m) | No. of GCPs | No. of CPs |
|---|---|---|---|---|---|---|---|
| DRTK_1 | A + B | 0.027 | 0.037 | 0.049 | 0.067 | 0 | 13 |
| DRTK_2 | A | 0.030 | 0.036 | 0.446 | 0.449 | 0 | 13 |
| DRTK_3 | A + B | 0.022 | 0.032 | 0.045 | 0.060 | 1 | 12 |
| DRTK_4 | A | 0.032 | 0.035 | 0.033 | 0.057 | 1 | 12 |
| DRTK_5 | A + B | 0.038 | 0.023 | 0.050 | 0.066 | 3 | 10 |
| DRTK_6 | A | 0.021 | 0.025 | 0.024 | 0.040 | 3 | 10 |
| ID | Georef. Approach | Flight Plan | RMSE TOT on CPs | No. of GCPs/CPs |
|---|---|---|---|---|
| PPK_1 | Direct Georef. | Nadiral + Oblique | 0.032 | 0/13 |
| PPK_2 | Direct Georef. | Nadiral | 3.019 | 0/13 |
| PPK_9 | Direct Georef. | Nadiral + Oblique | 0.031 | 0/13 |
| PPK_10 | Direct Georef. | Nadiral + Oblique | 0.035 | 0/13 |
| NRTK_1 | Direct Georef. | Nadiral + Oblique | 0.042 | 0/13 |
| NRTK_2 | Direct Georef. | Nadiral | 0.419 | 0/13 |
| DRTK_1 | Direct Georef. | Nadiral + Oblique | 0.067 | 0/13 |
| DRTK_2 | Direct Georef. | Nadiral | 0.449 | 0/13 |
| PPK_6 | Direct Georef. + GCPs | Nadiral + Oblique | 0.022 | 3/10 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teppati Losè, L.; Chiabrando, F.; Giulio Tonolo, F. Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices. ISPRS Int. J. Geo-Inf. 2020, 9, 578. https://doi.org/10.3390/ijgi9100578
Teppati Losè L, Chiabrando F, Giulio Tonolo F. Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices. ISPRS International Journal of Geo-Information. 2020; 9(10):578. https://doi.org/10.3390/ijgi9100578
Chicago/Turabian StyleTeppati Losè, Lorenzo, Filiberto Chiabrando, and Fabio Giulio Tonolo. 2020. "Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices" ISPRS International Journal of Geo-Information 9, no. 10: 578. https://doi.org/10.3390/ijgi9100578
APA StyleTeppati Losè, L., Chiabrando, F., & Giulio Tonolo, F. (2020). Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices. ISPRS International Journal of Geo-Information, 9(10), 578. https://doi.org/10.3390/ijgi9100578