An Efficient Probabilistic Registration Based on Shape Descriptor for Heritage Field Inspection




Abstract
:1. Introduction
2. Materials and Methods
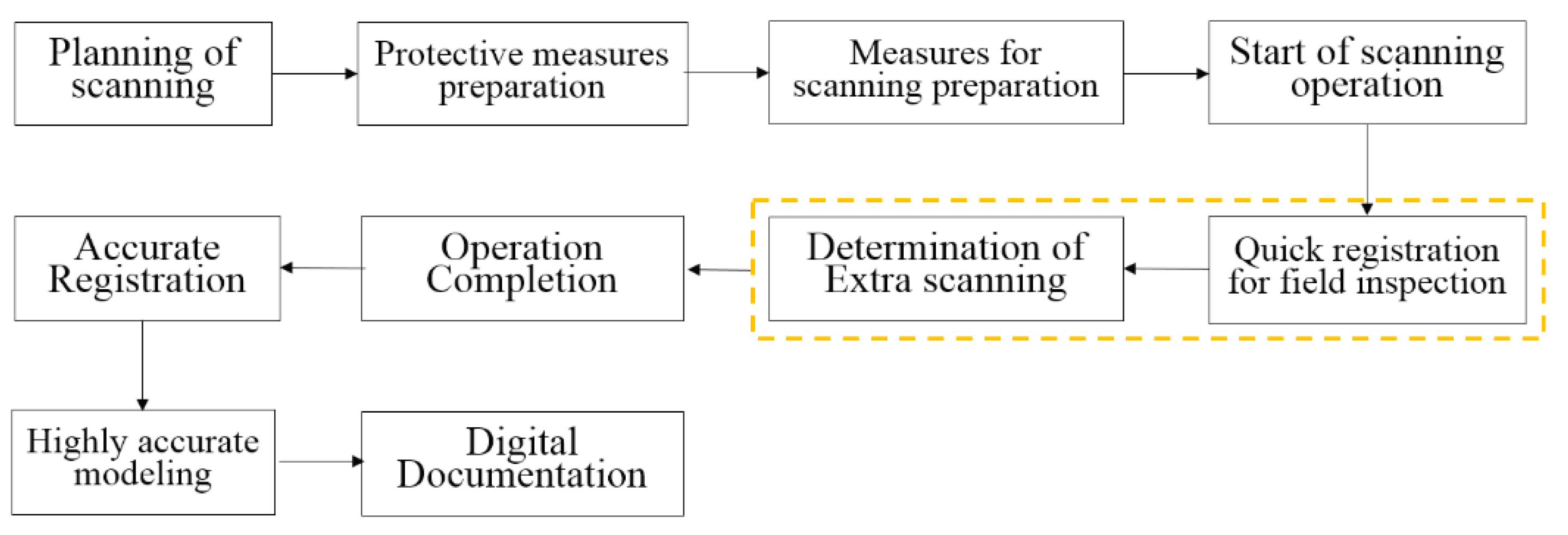
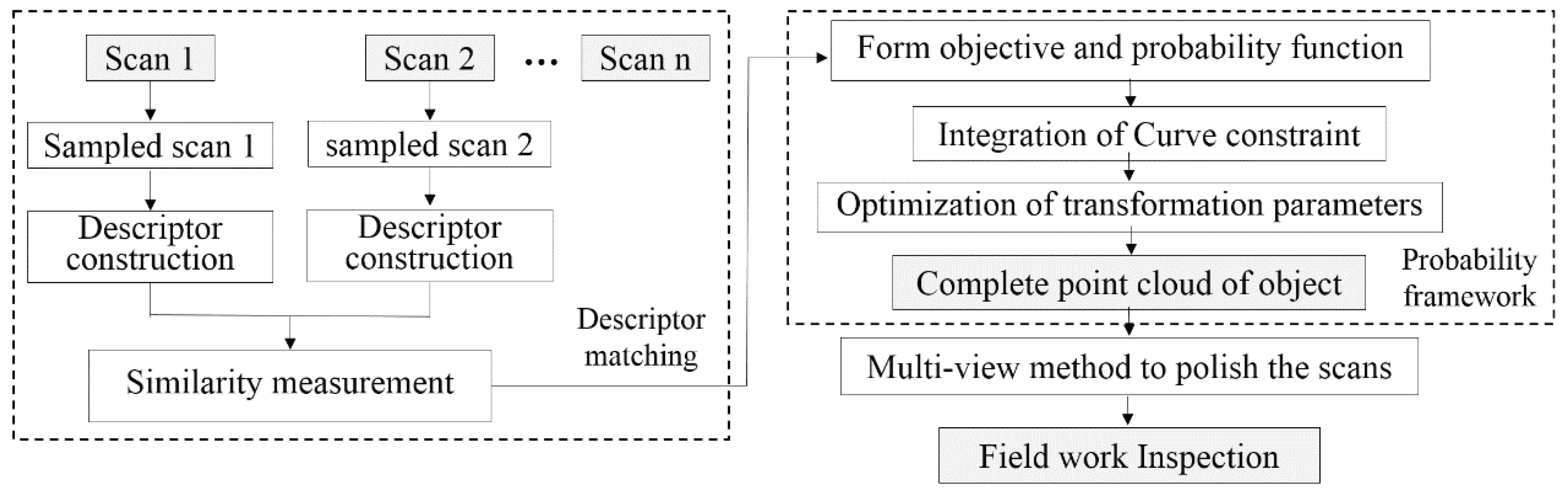
2.1. Processing Pipeline of Digital Documentation
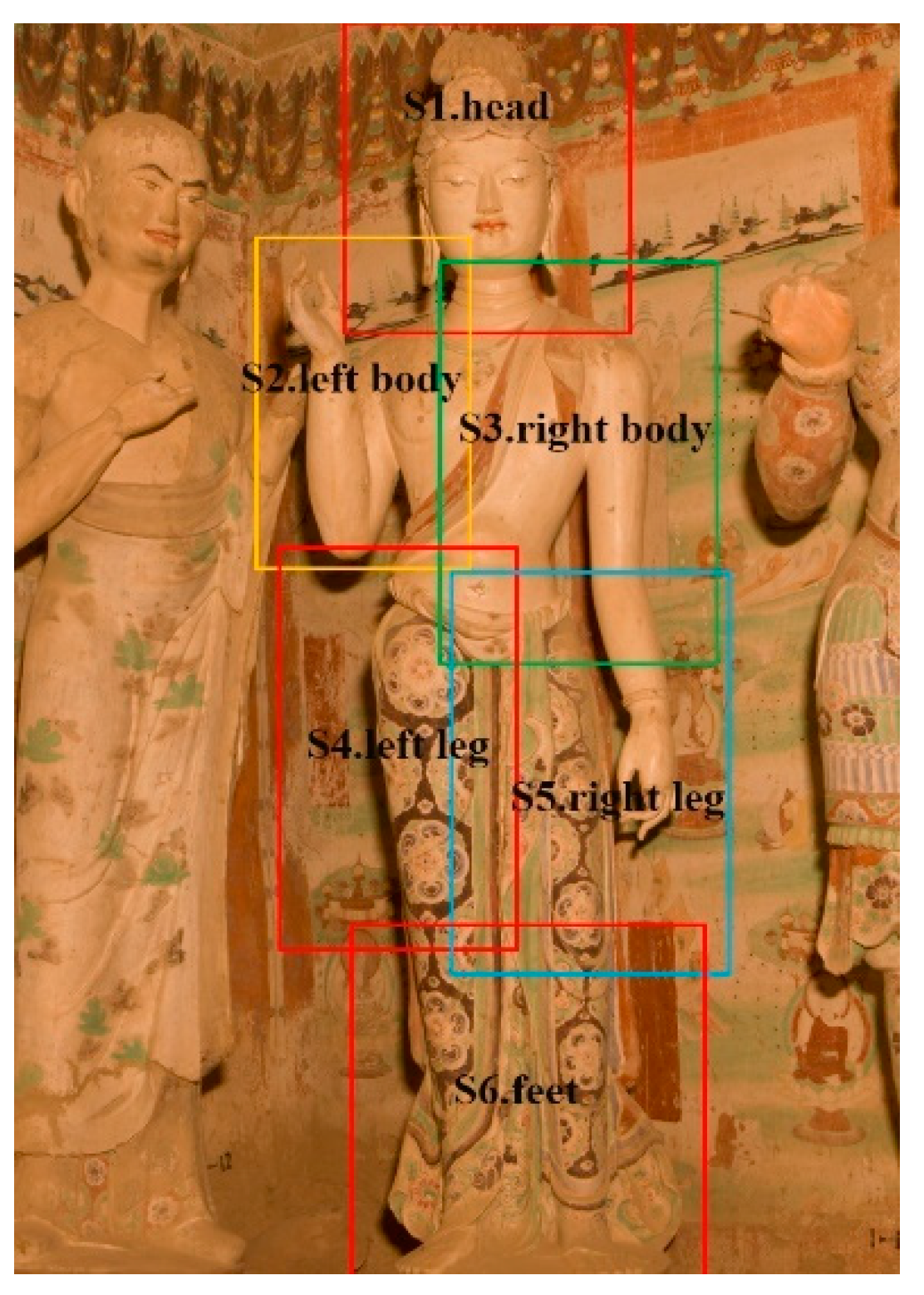
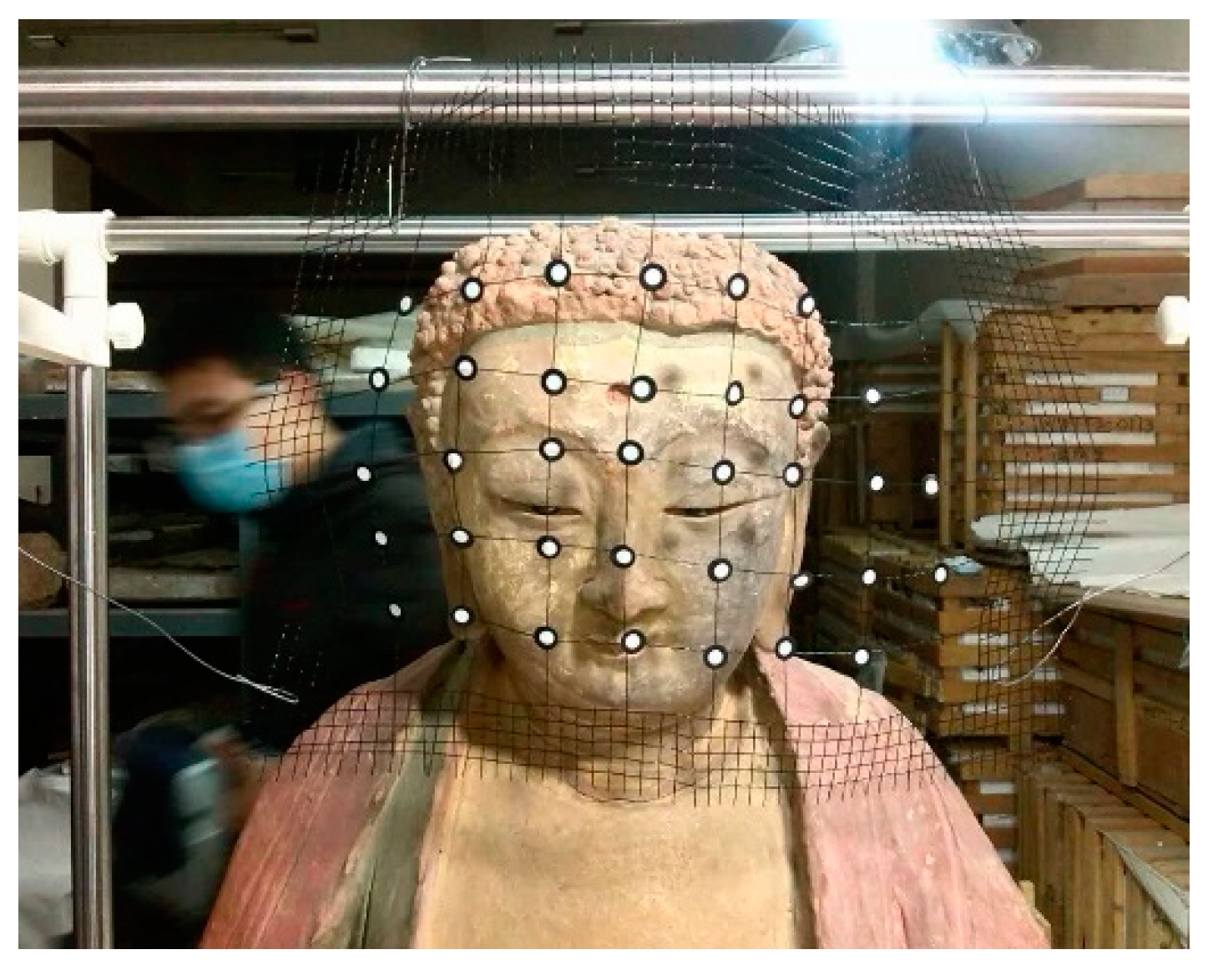
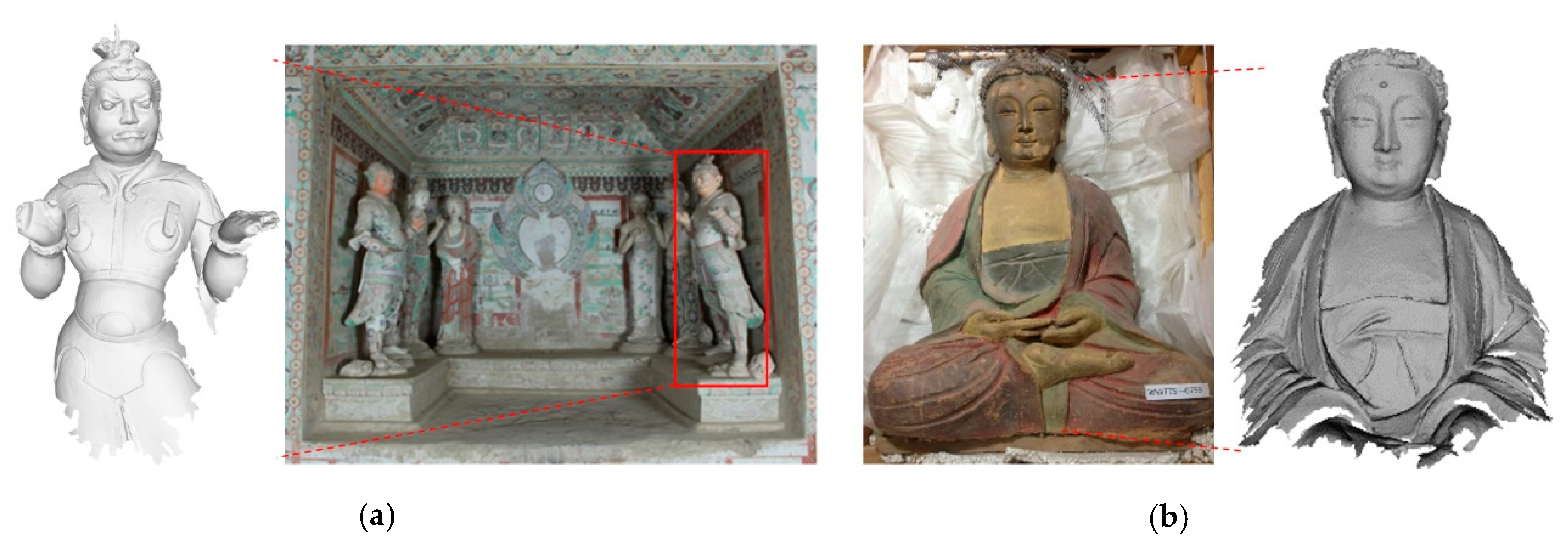
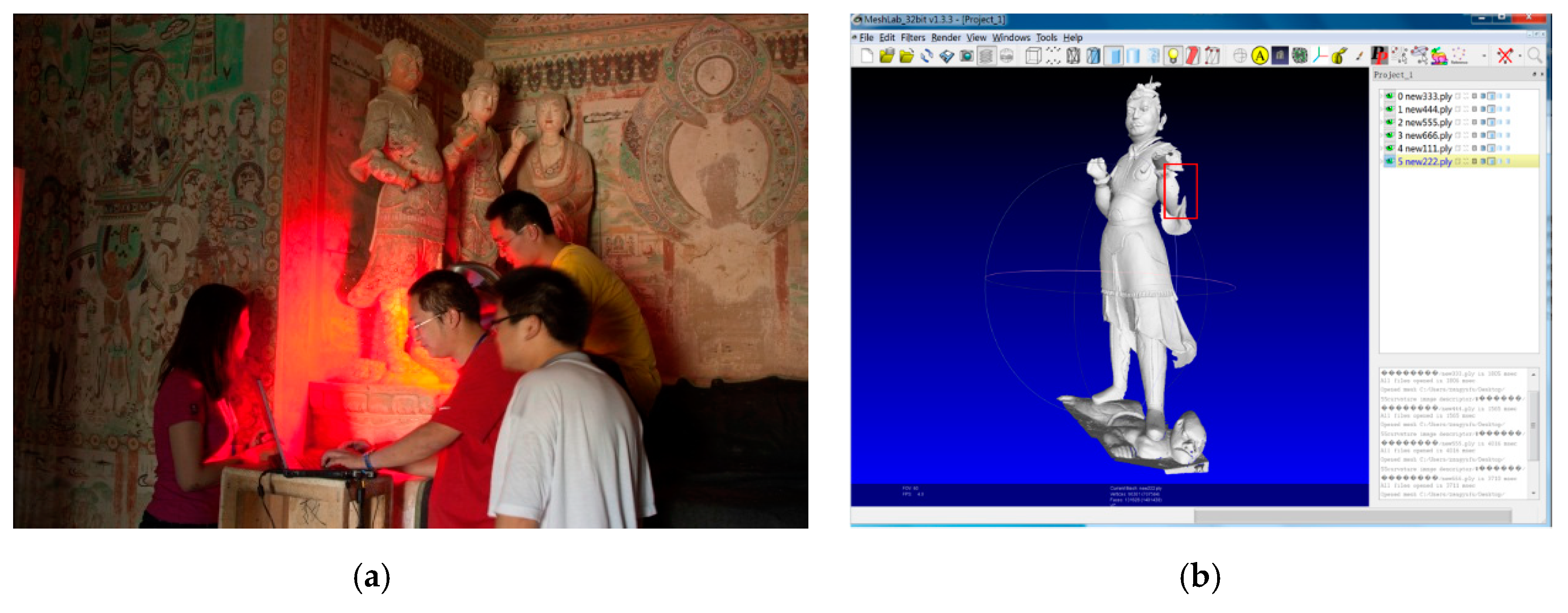
2.2. Experimental Point Cloud Datasets and Work Flow
2.3. Problem Formulation
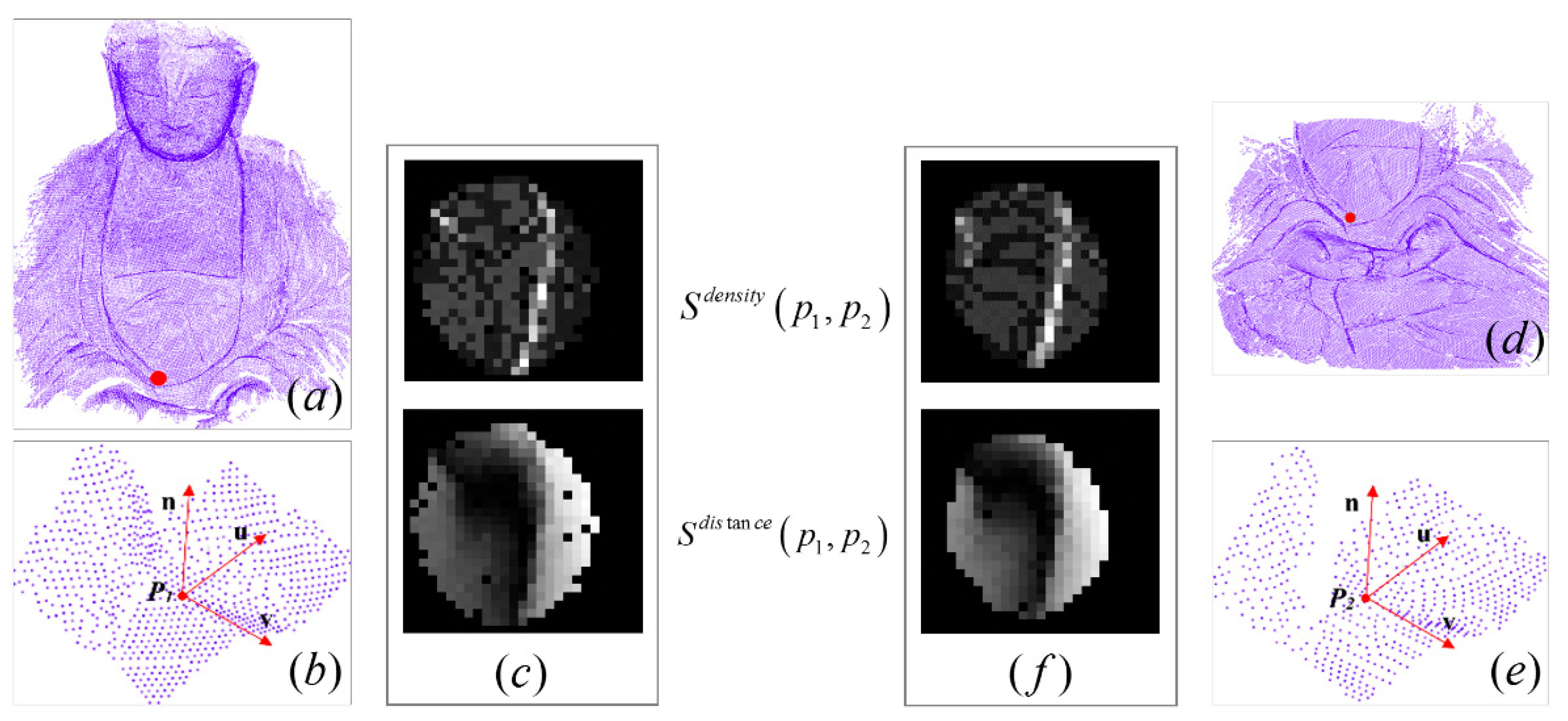
2.4. Principal Direction Descriptor of Local Surface
2.4.1. Construction of Local Frame
2.4.2. Generation of Descriptor Images and Similarity Measurement
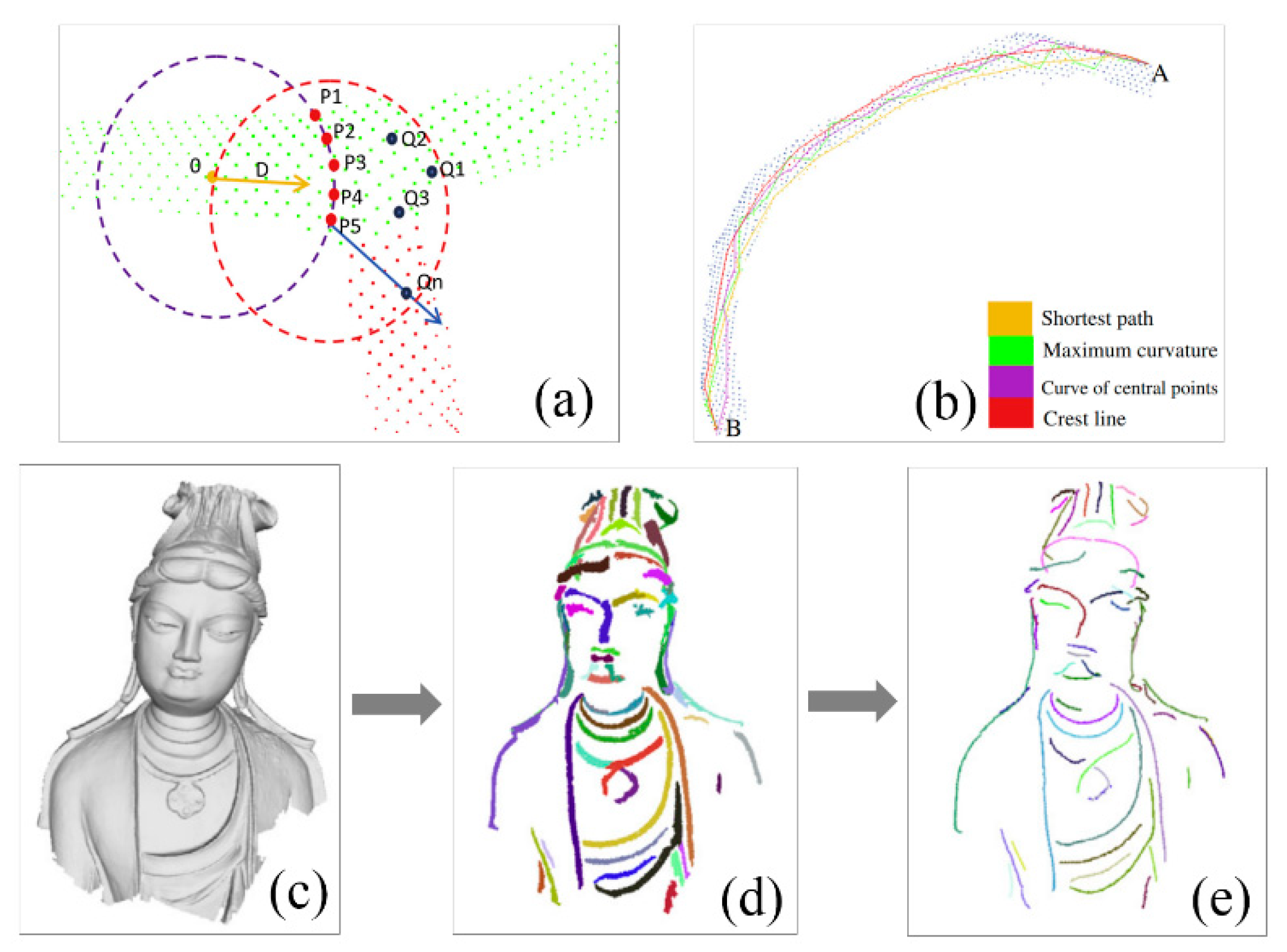
2.5. Spatial Curves Extraction from a Free-Form Object
2.6. Improved Pairwise Probabilistic Registration
2.6.1. Probabilistic Registration Based on Principal Direction Descriptor
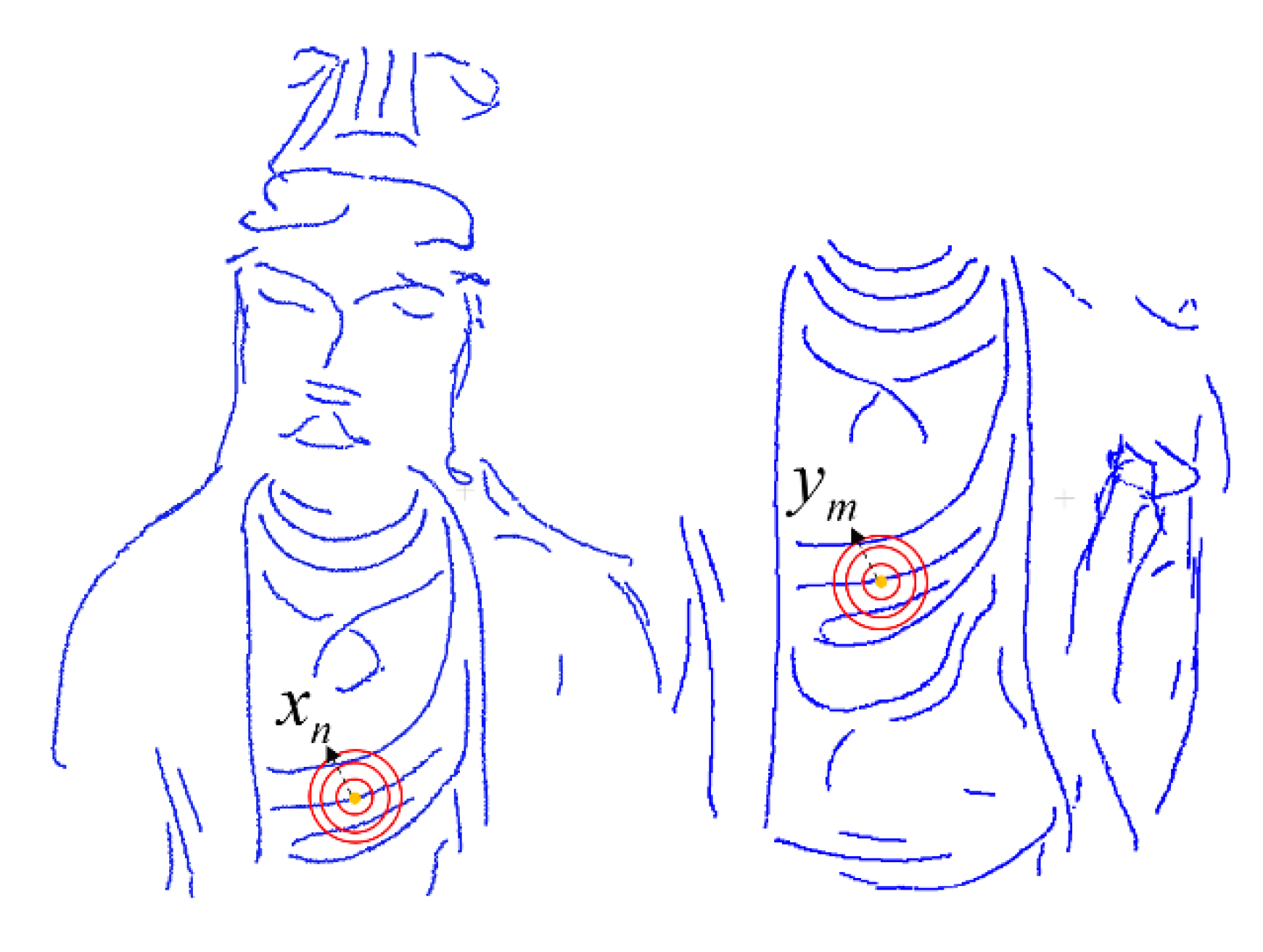
2.6.2. Spatial Curve Constraints
2.7. Multi-Scan Registration and Field Inspection
3. Results
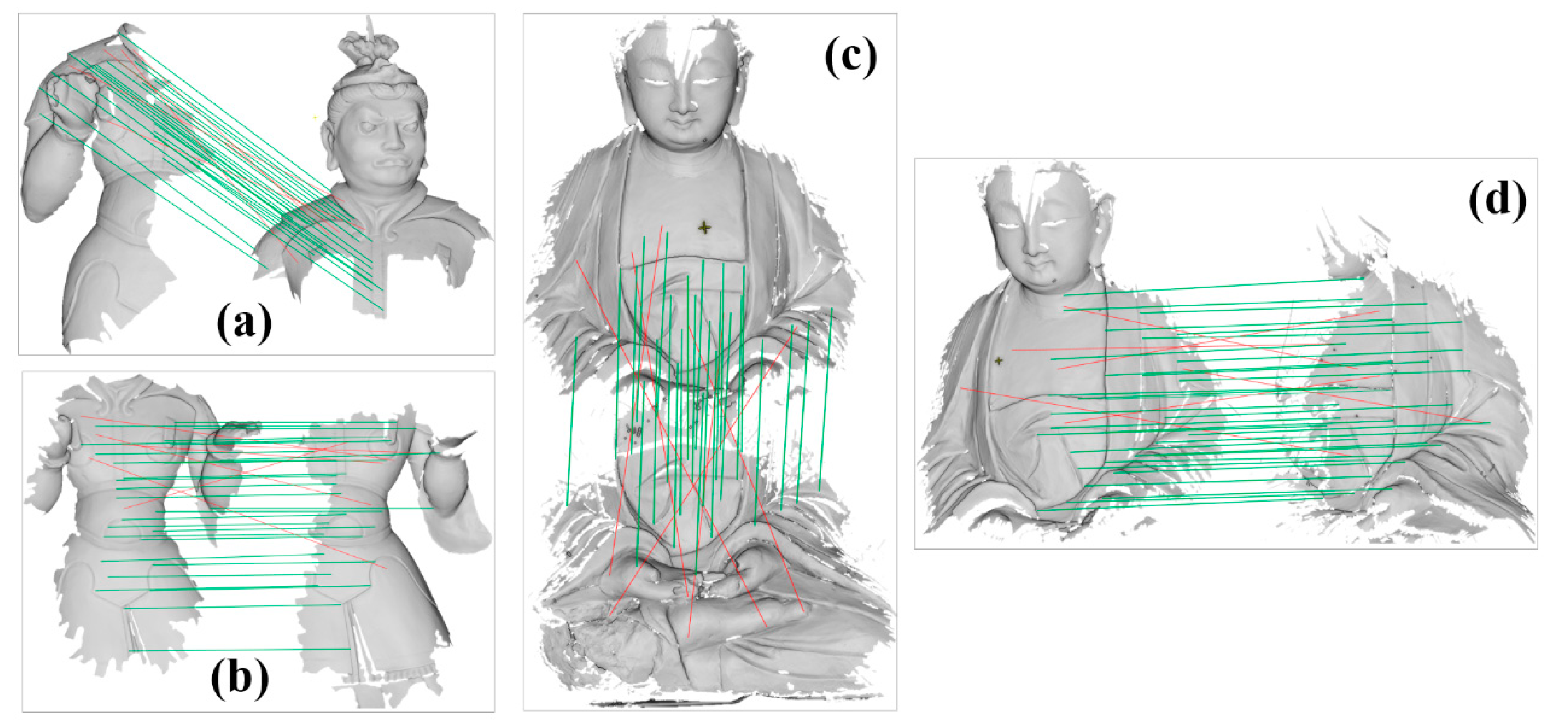
3.1. Correspondence Establishment
3.2. Registration Results
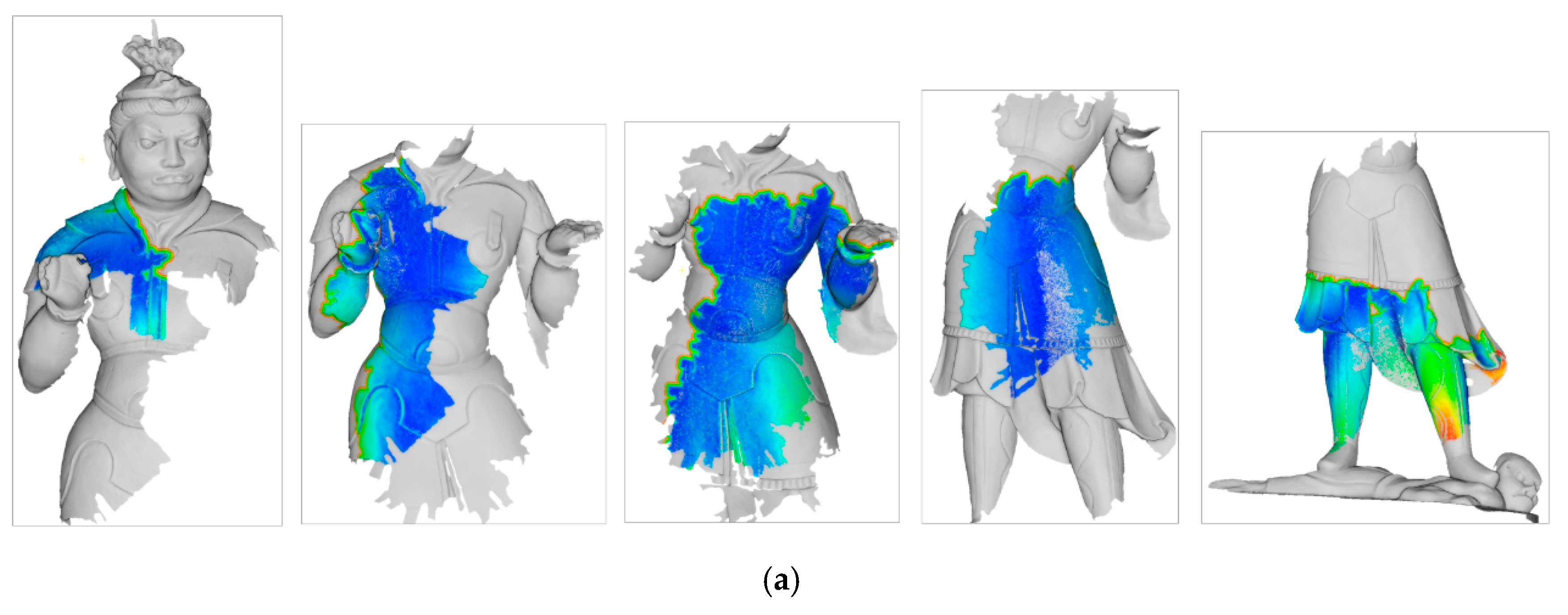
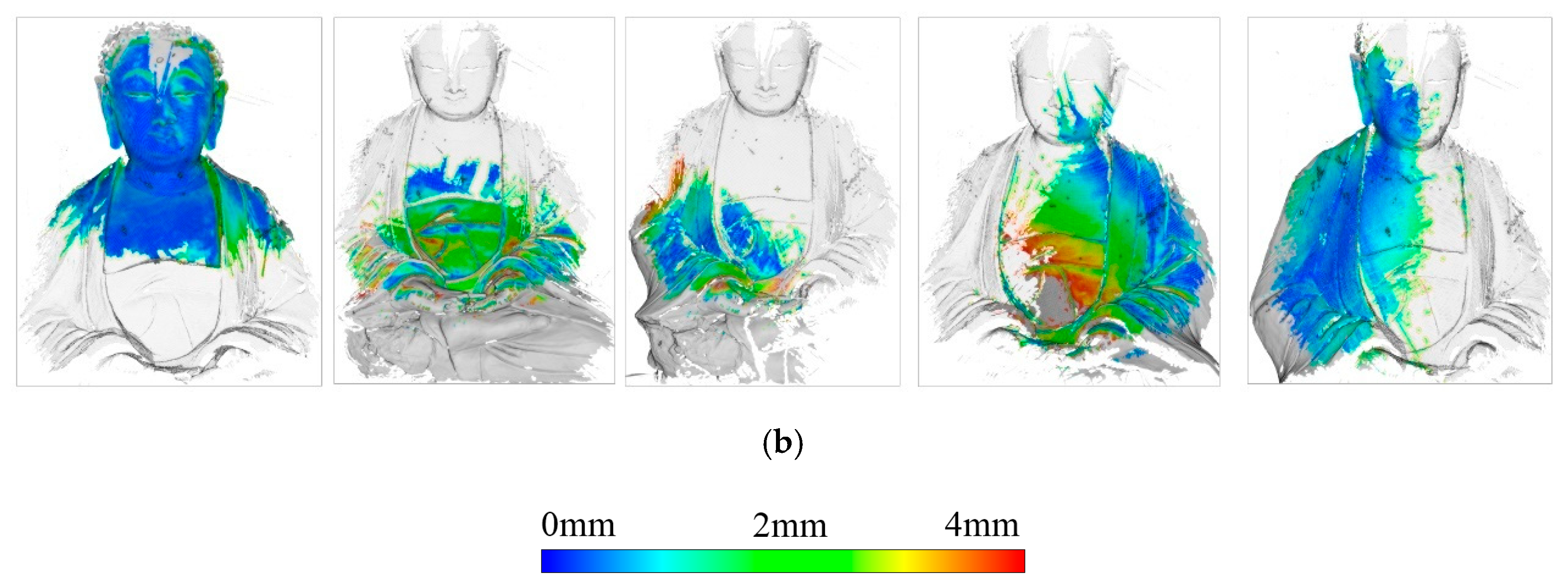
3.3. Field Inspection Result
4. Discussion
4.1. Pairwise Registration Comparison
4.2. Evaluation of Robustness Performance
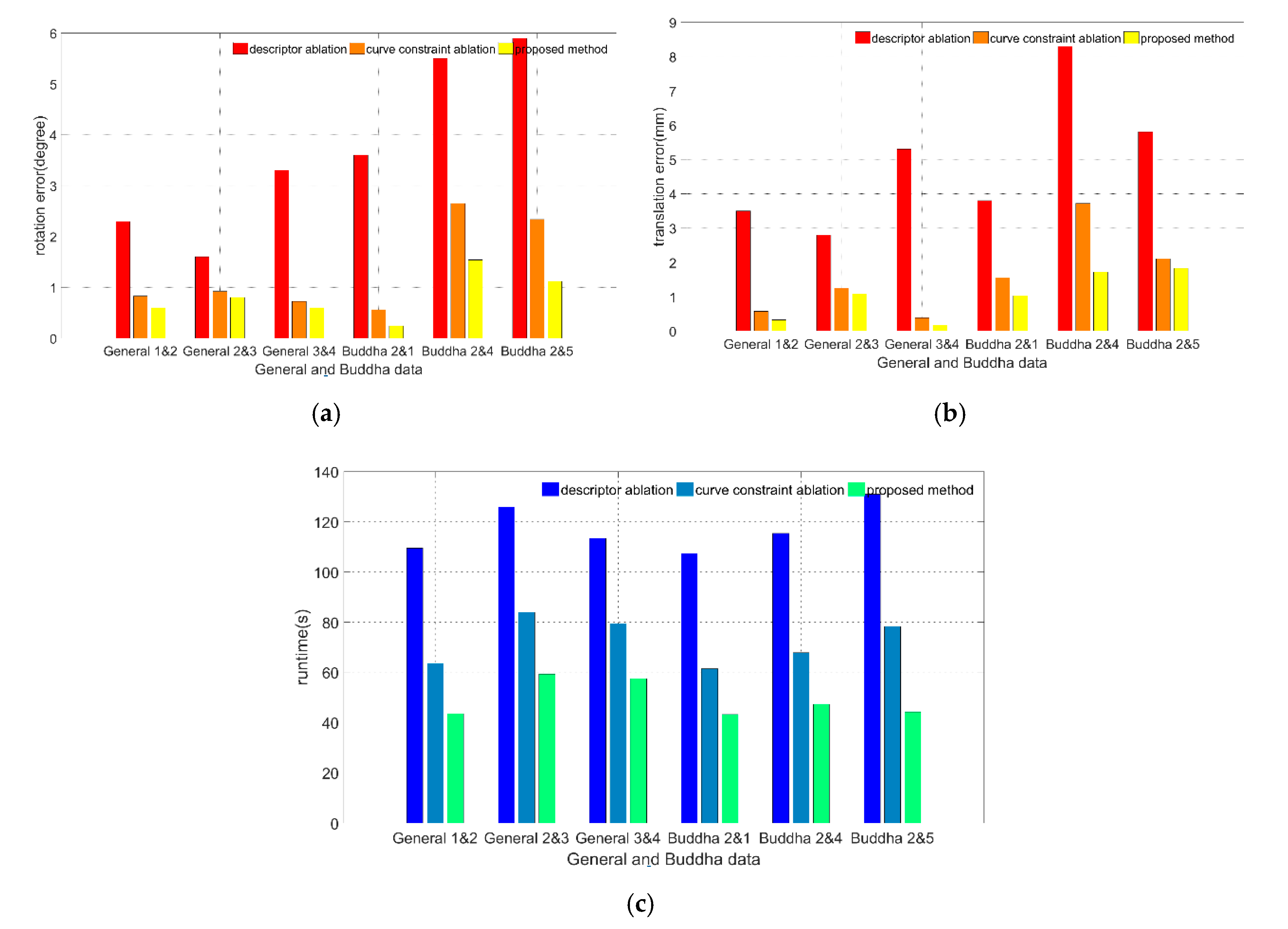
4.3. Ablation Study
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Alshawabkeh, Y.; El-Khalili, M.; Almasri, E.; Bala’Awi, F.; Al-Massarweh, A. Heritage documentation using laser scanner and photogrammetry. The case study of Qasr Al-Abidit, Jordan. Digit. Appl. Archaeol. Cult. Herit. 2020, 16, e00133. [Google Scholar] [CrossRef]
- Guarneri, M.; Ceccarelli, S.; De Collibus, M.F.; Francucci, M.; Ciaffi, M. Multi-wavelengths 3D laser scanning for pigment and structural studies on the frescoed ceiling the triumph of divine providence. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 2, 549–554. [Google Scholar] [CrossRef] [Green Version]
- Tumeliene, E.; Nareiko, V.; Suziedelyte-Visockiene, J. Photogrammetric measurements of heritage objects. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 71–76. [Google Scholar] [CrossRef] [Green Version]
- Kushwaha, S.K.P.; Dayal, K.R.; Raghavendra, S.; Pande, H.; Tiwari, P.S.; Agrawal, S.; Srivastava, S.K. 3D Digital documentation of a cultural heritage site using terrestrial laser scanner—A case study. In Applications of Geomatics in Civil Engineering; Springer: Singapore, 2020; pp. 49–58. [Google Scholar]
- Barrile, V.; Bilotta, G.; Meduri, G.M.; De Carlo, D.; Nunnari, A. Laser Scanner Technology, Ground-Penetrating Radar and Augmented Reality for the Survey and Recovery of Artistic, Archaeological and Cultural Heritage. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 123–127. [Google Scholar] [CrossRef] [Green Version]
- Selbesoglu, M.O.; Bakirman, T.; Gokbayrak, O. Deformation Measurement Using Terrestrial Laser Scanner For Cultural Heritage. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 89–93. [Google Scholar] [CrossRef] [Green Version]
- Ceccarelli, S.; Guarneri, M.; De Collibus, M.F.; Francucci, M.; Ciaffi, M.; Danielis, A. Laser Scanners for High-Quality 3D and IR Imaging in Cultural Heritage Monitoring and Documentation. J. Imaging 2018, 4, 130. [Google Scholar] [CrossRef] [Green Version]
- Klapa, P.; Mitka, B.; Zygmunt, M. Application of Integrated Photogrammetric and Terrestrial Laser Scanning Data to Cultural Heritage Surveying. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 32007. [Google Scholar] [CrossRef] [Green Version]
- Jo, Y.H.; Hong, S. Three-Dimensional Digital Documentation of Cultural Heritage Site Based on the Convergence of Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry. ISPRS Int. J. Geo-Inf. 2019, 8, 53. [Google Scholar] [CrossRef] [Green Version]
- Rüther, H.; Held, C.; Bhurtha, R.; Schröder, R.; Wessels, S. Challenges in heritage documentation with terrestrial laser scanning. In Proceedings of the 1st AfricaGEO Conference, Capetown, South Africa, 30 May 2011. [Google Scholar]
- Markiewicz, J.; Zawieska, D. Analysis of the Selection Impact of 2D Detectors on the Accuracy of Image-Based TLS Data Registration of Objects of Cultural Heritage and Interiors of Public Utilities. Sensors 2020, 20, 3277. [Google Scholar] [CrossRef]
- Markiewicz, J.S.; Markiewicz, Ł.; Foryś, P. The comparision of 2D and 3D detectors for TLS data registration–preliminary results. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 467–472. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Shan, S.; He, C.; Zhao, G.; Pietikäinen, M.; Chen, X.; Gao, W. WLD: A Robust Local Image Descriptor. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 1705–1720. [Google Scholar] [CrossRef]
- Zhu, J.; Fang, Y. Reference Grid-assisted Network for 3D Point Signature Learning from Point Clouds. In Proceedings of the 2020 IEEE Winter Conference on Applications of Computer Vision (WACV), Snowmass Village, CO, USA, 1–5 March 2020; pp. 211–220. [Google Scholar]
- Li, X.; Liu, J.; Zhao, H. Point cloud registration by discrete spin image and normal alignment radial feature. In Proceedings of the 15th ACM SIGGRAPH Conference on Virtual-Reality Continuum and Its Applications in Industry, Zhuhai, China, 3–4 December 2016; Volume 1, pp. 373–379. [Google Scholar]
- Wang, F.; Ye, Y.; Hu, X.; Shan, J. Point cloud registration by combining shape and intensity contexts. In Proceedings of the 2016 9th IAPR Workshop on Pattern Recognition in Remote Sensing (PRRS), Cancun, Mexico, 4 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Cejnog, L.W.X.; Yamada, F.A.A.; Vieira, M.B. Wide Angle Rigid Registration Using a Comparative Tensor Shape Factor. Int. J. Image Graph. 2017, 17, 1750006. [Google Scholar] [CrossRef]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Tombari, F.; Salti, S.; Di Stefano, L. Unique signatures of histograms for local surface description. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2010; pp. 356–369. [Google Scholar]
- Ragb, H.K.; Asari, V.K. Multi-feature fusion and PCA based approach for efficient human detection. In Proceedings of the 2016 IEEE Applied Imagery Pattern Recognition Workshop, Washington, DC, USA, 18–20 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, B.; Liu, Y.; Liang, F.; Li, B.; Zang, Y. A novel binary shape context for 3D local surface description. ISPRS J. Photogramm. Remote Sens. 2017, 130, 431–452. [Google Scholar] [CrossRef]
- Cirujeda, P.; Cid, Y.D.; Mateo, X.; Binefa, X. A 3D Scene Registration Method via Covariance Descriptors and an Evolutionary Stable Strategy Game Theory Solver. Int. J. Comput. Vis. 2015, 115, 306–329. [Google Scholar] [CrossRef]
- Yang, B.; Zang, Y. Automated registration of dense terrestrial laser-scanning point clouds using curves. ISPRS J. Photogramm. Remote Sens. 2014, 95, 109–121. [Google Scholar] [CrossRef]
- Takimoto, R.Y.; Tsuzuki, M.S.G.; Vogelaar, R.; Martins, T.C.; Sato, A.K.; Iwao, Y.; Gotoh, T.; Kagei, S. 3D reconstruction and multiple point cloud registration using a low precision RGB-D sensor. Mechatronics 2016, 35, 11–22. [Google Scholar] [CrossRef]
- Huhle, B.; Magnusson, M.; Strasser, W.; Lilienthal, A.J. Registration of colored 3D point clouds with a Kernel-based extension to the normal distributions transform. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 4025–4030. [Google Scholar]
- Della Corte, B.; Bogoslavskyi, I.; Stachniss, C.; Grisetti, G. A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Servos, J.; Waslander, S.L. Multi-Channel Generalized-ICP: A robust framework for multi-channel scan registration. Robot. Auton. Syst. 2017, 87, 247–257. [Google Scholar] [CrossRef] [Green Version]
- Zaganidis, A.; Sun, L.; Duckett, T.; Cielniak, G. Integrating Deep Semantic Segmentation Into 3-D Point Cloud Registration. IEEE Robot. Autom. Lett. 2018, 3, 2942–2949. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Zhou, Q.-Y.; Koltun, V. Colored Point Cloud Registration Revisited. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 143–152. [Google Scholar]
- Akca, D. Registration of point clouds using range and intensity information. In Recording, Modeling and Visualization of Cultural Heritage; Taylor & Francis: Abingdon, UK, 2006; pp. 115–126. [Google Scholar]
- Sipiran, I.; Bustos, B. Harris 3D: A robust extension of the Harris operator for interest point detection on 3D meshes. Vis. Comput. 2011, 27, 963–976. [Google Scholar] [CrossRef]
- Urschler, M.; Bauer, J.; Ditt, H.; Bischof, H. SIFT and shape context for feature-based nonlinear registration of thoracic CT images. In International Workshop on Computer Vision Approaches to Medical Image Analysis; Springer: Berlin/Heidelberg, Germany, 2006; pp. 73–84. [Google Scholar]
- Tong, L.; Ying, X. 3D Point Cloud Initial Registration Using Surface Curvature and SURF Matching. 3D Res. 2018, 9, 41. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, J.; Zhang, G. An automatic 3D point cloud registration method based on regional curvature maps. Image Vis. Comput. 2016, 56, 49–58. [Google Scholar] [CrossRef]
- Bueno, M.; Martínez-Sánchez, J.; González-Jorge, H. Detection of geometric keypoints and its application to point cloud coarse registration. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 187–194. [Google Scholar] [CrossRef]
- Li, P.; Ma, H.; Ming, A. A non-rigid 3D model retrieval method based on scale-invariant heat kernel signature features. Multimed. Tools Appl. 2017, 76, 10207–10230. [Google Scholar] [CrossRef]
- Zhai, Y.; Han, S.; Liu, F.; Li, W.; Guo, S.; Lai, Z. Target recognition of ladar range images using modified local surface patches. Opt. Laser Technol. 2020, 130, 106359. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, X.; Su, Q.; Shi, J.; Caselli, R.J.; Wang, Y. A novel cortical thickness estimation method based on volumetric Laplace–Beltrami operator and heat kernel. Med. Image Anal. 2015, 22, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Hussnain, Z.; Oude Elberink, S.; Vosselman, G. Automatic Feature Detection, Description and Matching from Mobile Laser Scanning Data and Aerial Imagery. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 609–616. [Google Scholar] [CrossRef]
- Petricek, T.; Svoboda, T. Point cloud registration from local feature correspondences—Evaluation on challenging datasets. PLoS ONE 2017, 12, e0187943. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Mei, Y. An efficient registration algorithm based on spin image for LiDAR 3D point cloud models. Neurocomputing 2015, 151, 354–363. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, B.; Liang, F.; Huang, R.; Scherer, S. Hierarchical registration of unordered TLS point clouds based on binary shape context descriptor. ISPRS J. Photogramm. Remote Sens. 2018, 144, 61–79. [Google Scholar] [CrossRef]
- Bueno, M.; González-Jorge, H.; Martínez-Sánchez, J.; Lorenzo, H. Automatic point cloud coarse registration using geometric keypoint descriptors for indoor scenes. Autom. Constr. 2017, 81, 134–148. [Google Scholar] [CrossRef]
- Shanoer, M.M.; Abed, F.M. Evaluate 3D laser point clouds registration for cultural heritage documentation. Egypt. J. Remote Sens. Space Sci. 2018, 21, 295–304. [Google Scholar] [CrossRef]
- Tournas, E.; Tsakiri, M. Automatic 3D point cloud registration for cultural heritage documentation. In Proceedings of the Laser Scanning; IAPRS: Paris, France, 2009; Volume XXXVIII(3), p. W8. [Google Scholar]
- Shao, J.; Zhang, W.; Mellado, N.; Grussenmeyer, P.; Li, R.; Chen, Y.; Wan, P.; Zhang, X.; Cai, S. Automated markerless registration of point clouds from TLS and structured light scanner for heritage documentation. J. Cult. Herit. 2019, 35, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Bae, K.-H.; Lichti, D.D. A method for automated registration of unorganised point clouds. ISPRS J. Photogramm. Remote Sens. 2008, 63, 36–54. [Google Scholar] [CrossRef]
- Yu, H.; Zhen, W.; Yang, W.; Scherer, S. Line-Based 2-D–3-D Registration and Camera Localization in Structured Environments. IEEE Trans. Instrum. Meas. 2020, 69, 8962–8972. [Google Scholar] [CrossRef]
- Awad, M.M. A Morphological Model for Extracting Road Networks from High-Resolution Satellite Images. J. Eng. 2013, 2013, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Babawuro, U.; Beiji, Z. Satellite imagery quality evaluation using image quality metrics for quantitative cadastral analysis. Int. J. Comput. Appl. Eng. Sci. 2011, 1, 391–395. [Google Scholar]
- Babawuro, U.; Beiji, Z. Satellite imagery cadastral features extractions using image processing algorithms: A viable option for cadastral science. Int. J. Comput. Sci. Issues 2012, 9, 30–38. [Google Scholar]
- Grigillo, D.; Kanjir, U. Urban object extraction from digital surface model and digital aerial images. Proc. ISPRS 2012, 22, 215–220. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Jie, S.; Yao, W.; Stilla, U. Building boundary improvement for true orthophoto generation by fusing airborne LiDAR data. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Munich, Germany, 11–13 April 2011. [Google Scholar]
- Date, H.; Yokoyama, T.; Kanai, S.; Hada, Y.; Nakao, M.; Sugawara, T. Efficient Registration of Laser-Scanned Point Clouds of Bridges Using Linear Features. Int. J. Autom. Technol. 2018, 12, 328–338. [Google Scholar] [CrossRef]
- Cui, T.; Ji, S.; Shan, J.; Gong, J.; Liu, K. Line-Based Registration of Panoramic Images and LiDAR Point Clouds for Mobile Mapping. Sensors 2017, 17, 70. [Google Scholar] [CrossRef]
- Vosselman, G.; Dijkman, S. 3D building model reconstruction from point clouds and ground plans. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 37–44. [Google Scholar]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Pu, S.; Vosselman, G. Knowledge based reconstruction of building models from terrestrial laser scanning data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 575–584. [Google Scholar] [CrossRef]
- Khoshelham, K. Closed-form solutions for estimating a rigid motion from plane correspondences extracted from point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 114, 78–91. [Google Scholar] [CrossRef]
- Eslami, M.; Saadatseresht, M. A New Tie Plane-Based Method for Fine Registration of Imagery and Point Cloud Dataset. Can. J. Remote Sens. 2020, 1–18. [Google Scholar] [CrossRef]
- Xu, Y.; Boerner, R.; Yao, W.; Hoegner, L.; Stilla, U. Automatic coarse registration of point clouds in 3D urban scenes using voxel based plane constraint. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Sun, L.; Zhong, R.; Chen, D.; Xu, Z.; Wang, C.; Qin, C.-Z.; Sun, H.; Li, R. 3-D Deep Feature Construction for Mobile Laser Scanning Point Cloud Registration. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1904–1908. [Google Scholar] [CrossRef]
- Pujol-Miró, A.; Casas, J.R.; Ruiz-Hidalgo, J. Correspondence matching in unorganized 3D point clouds using Convolutional Neural Networks. Image Vis. Comput. 2019, 83, 51–60. [Google Scholar] [CrossRef]
- Charles, R.Q.; Su, H.; Kaichun, M.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In Advances in Neural Information Processing Systems; NIPS: Long Beach, CA, USA, 2017; pp. 5099–5108. [Google Scholar]
- Deng, H.; Birdal, T.; Ilic, S. Ppf-foldnet: Unsupervised learning of rotation invariant 3d local descriptors. In European Conference on Computer Vision; Springer: Munich, Germany, 2018; pp. 602–618. [Google Scholar]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. PointNetLK: Robust and efficient point cloud registration using PointNet. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7163–7172. [Google Scholar]
- Kurobe, A.; Sekikawa, Y.; Ishikawa, K.; Saito, H. CorsNet: 3D Point Cloud Registration by Deep Neural Network. IEEE Robot. Autom. Lett. 2020, 5, 3960–3966. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Keypoint-based 4-Points Congruent Sets–Automated marker-less registration of laser scans. ISPRS J. Photogramm. Remote Sens. 2014, 96, 149–163. [Google Scholar] [CrossRef]
- Zhou, Q.-Y.; Park, J.; Koltun, V. Fast global registration. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 766–782. [Google Scholar]
- Yang, J.; Li, H.; Jia, Y. Go-ICP: Solving 3D Registration Efficiently and Globally Optimally. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1457–1464. [Google Scholar]
- Kim, P.; Chen, J.; Cho, Y.K. SLAM-driven robotic mapping and registration of 3D point clouds. Autom. Constr. 2018, 89, 38–48. [Google Scholar] [CrossRef]
- Evangelidis, G.D.; Horaud, R. Joint Alignment of Multiple Point Sets with Batch and Incremental Expectation-Maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 1397–1410. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Myronenko, A.; Song, X.; Carreira-Perpinán, M.A. Non-rigid point set registration: Coherent point drift. In Advances in Neural Information Processing Systems; NIPS: Vancouver, BC, Canada, 2007; pp. 1009–1016. [Google Scholar]
- Wang, P.; Wang, P.; Qu, Z.; Gao, Y.; Shen, Z. A refined coherent point drift (CPD) algorithm for point set registration. Sci. China Inf. Sci. 2011, 54, 2639–2646. [Google Scholar] [CrossRef] [Green Version]
- Lu, M.; Zhao, J.; Guo, Y.; Ou, J.; Li, J. A 3D point cloud registration algorithm based on fast coherent point drift. In Proceedings of the 2014 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 1–6 October 2004. [Google Scholar]
- Besl, P.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 2724–2729. [Google Scholar]
- Dong, J.; Peng, Y.; Ying, S.; Hu, Z. LieTrICP: An improvement of trimmed iterative closest point algorithm. Neurocomputing 2014, 140, 67–76. [Google Scholar] [CrossRef]
- Xie, Z.; Xu, S.; Li, X. A high-accuracy method for fine registration of overlapping point clouds. Image Vis. Comput. 2010, 28, 563–570. [Google Scholar] [CrossRef]
- Takeuchi, E.; Tsubouchi, T. A 3-D Scan Matching using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3068–3073. [Google Scholar]
- Stoyanov, T.; Magnusson, M.; Andreasson, H.; Lilienthal, A.J. Fast and accurate scan registration through minimization of the distance between compact 3D NDT representations. Int. J. Robot. Res. 2012, 31, 1377–1393. [Google Scholar] [CrossRef]
- Das, A.; Waslander, S.L. Scan registration using segmented region growing NDT. Int. J. Robot. Res. 2014, 33, 1645–1663. [Google Scholar] [CrossRef]
- Zang, Y.; Lindenbergh, R.; Yang, B.; Guan, H. Density-Adaptive and Geometry-Aware Registration of TLS Point Clouds Based on Coherent Point Drift. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1628–1632. [Google Scholar] [CrossRef]
- Zang, Y.; Yang, B.; Li, J.; Guan, H. An Accurate TLS and UAV Image Point Clouds Registration Method for Deformation Detection of Chaotic Hillside Areas. Remote Sens. 2019, 11, 647. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Methods | Scans | Overlap (%) | Sampled Points of Scans | Mean (mm) | Std. (mm) | Iterations | Runtime (s) |
|---|---|---|---|---|---|---|---|---|
| General data | Pairwise method | 1&2 | 21 | 3532/6946 | 0.52 | 0.23 | 6 | 43.5 |
| 2&3 | 42 | 6946/5942 | 0.56 | 0.34 | 7 | 59.3 | ||
| 3&4 | 65 | 5942/6234 | 0.51 | 0.31 | 8 | 57.4 | ||
| 4&5 | 41 | 6234/7213 | 0.48 | 0.12 | 6 | 61.9 | ||
| 5&6 | 46 | 7213/5268 | 1.21 | 0.78 | 7 | 55.5 | ||
| Multi-view method | / | / | / | 0.38 | 0.27 | / | 27.5 | |
| Buddha data | Pairwise method | 2&1 | 42 | 6138/4282 | 0.23 | 0.11 | 6 | 43.2 |
| 2&4 | 37 | 6138/6021 | 1.83 | 1.20 | 8 | 47.4 | ||
| 2&5 | 23 | 6138/4827 | 1.56 | 1.03 | 7 | 44.2 | ||
| 2&7 | 51 | 6138/4903 | 2.43 | 1.67 | 5 | 29.6 | ||
| 2&8 | 52 | 6138/4109 | 0.51 | 0.32 | 5 | 31.7 | ||
| Multi-view method | / | / | / | 0.69 | 0.53 | / | 23.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, Y.; Li, B.; Xiao, X.; Zhu, J.; Meng, F. An Efficient Probabilistic Registration Based on Shape Descriptor for Heritage Field Inspection. ISPRS Int. J. Geo-Inf. 2020, 9, 759. https://doi.org/10.3390/ijgi9120759
Zang Y, Li B, Xiao X, Zhu J, Meng F. An Efficient Probabilistic Registration Based on Shape Descriptor for Heritage Field Inspection. ISPRS International Journal of Geo-Information. 2020; 9(12):759. https://doi.org/10.3390/ijgi9120759
Chicago/Turabian StyleZang, Yufu, Bijun Li, Xiongwu Xiao, Jianfeng Zhu, and Fancong Meng. 2020. "An Efficient Probabilistic Registration Based on Shape Descriptor for Heritage Field Inspection" ISPRS International Journal of Geo-Information 9, no. 12: 759. https://doi.org/10.3390/ijgi9120759
APA StyleZang, Y., Li, B., Xiao, X., Zhu, J., & Meng, F. (2020). An Efficient Probabilistic Registration Based on Shape Descriptor for Heritage Field Inspection. ISPRS International Journal of Geo-Information, 9(12), 759. https://doi.org/10.3390/ijgi9120759