Slope Hazard Monitoring Using High-Resolution Satellite Remote Sensing: Lessons Learned from a Case Study



Abstract
:1. Introduction
- What is the most suitable wavelength, C, X or L band?
- What is the best incidence angle?
- What is the proper revisit frequency?
- Ascending or descending?
- What resolution can be accepted?
- What acquisition mode is better, i.e., stripmap or spotlight?
- What is the configuration that gives the best resolution for the AoI (both spatial and temporal)?
- What is the configuration that gives the best sensitivity of the measurement to the satellite line of sight (LoS)?
- What is the configuration that gives the best signal–noise ratio (SNR) for the AoI?
- Evaluate all available satellite sources, then decide the optimal satellite and configuration for this project;
- Run MTInSAR for the given AoI and interpret the results.
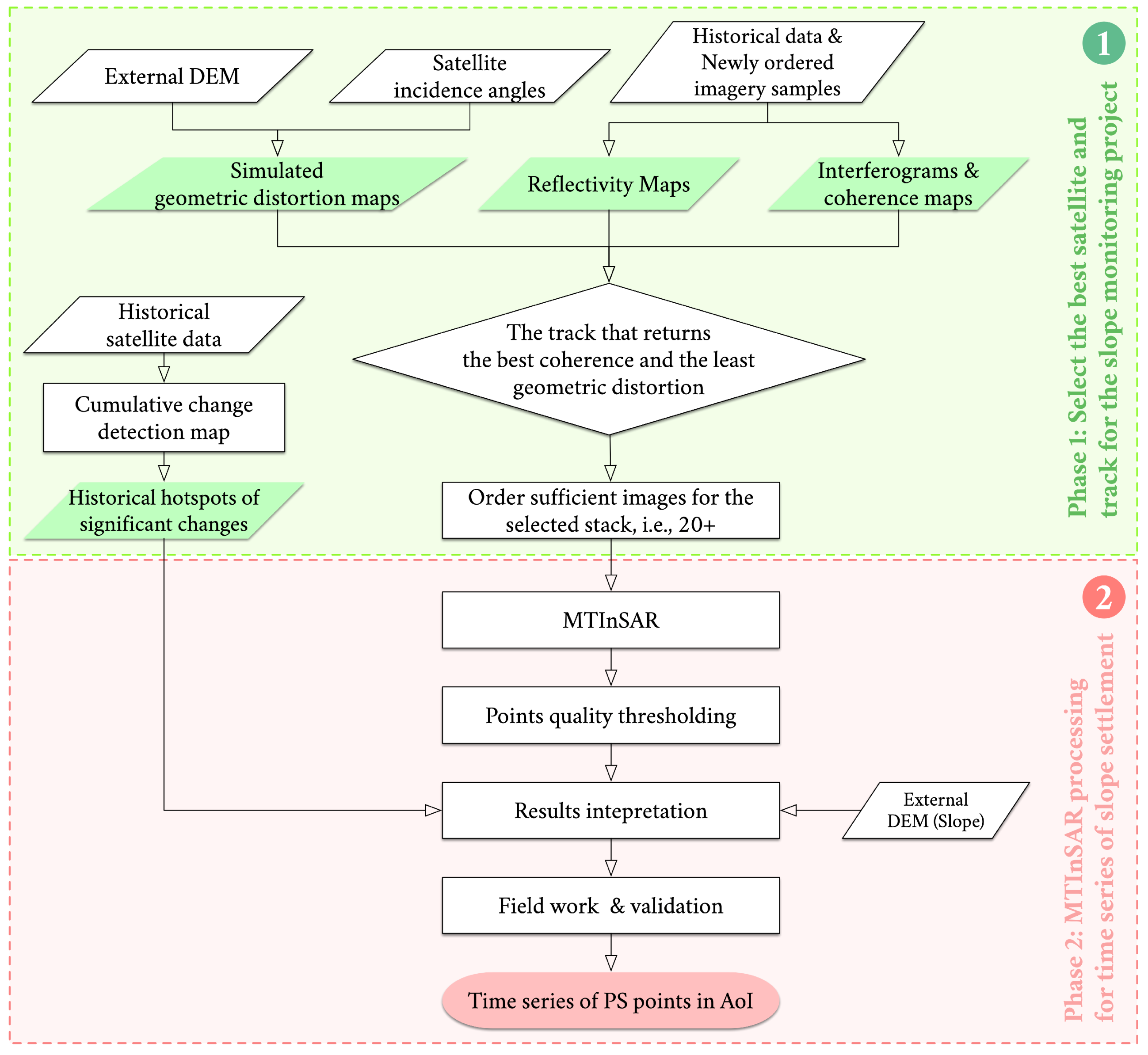
2. Workflow
2.1. Phase 1: Evaluate the Most Appropriate Satellite and Configuration
- Generate the simulated geometric distortion map from the external digital elevation model (DEM), satellite resolution and incidence angle;
- Calculate the cumulative change detection map from historical data, and label a list of historical hotspots that require special attention for MTInSAR processing;
- (If budget is available) Order a couple of images from the candidate satellite tracks and process the reflectivity maps, interferograms and coherence maps. Cross-check with the simulated geometric distortion map to understand if the results are consistent with the simulated geometric distortion map;
- Select the satellite and track that: (a) has the suitable spatial resolution for the monitoring target; and (b) has the best coherence in the AoI and at the slopes of interests (SoI).
2.2. Phase 2: Multi-Temporal Analysis with the Selected Satellite Configuration
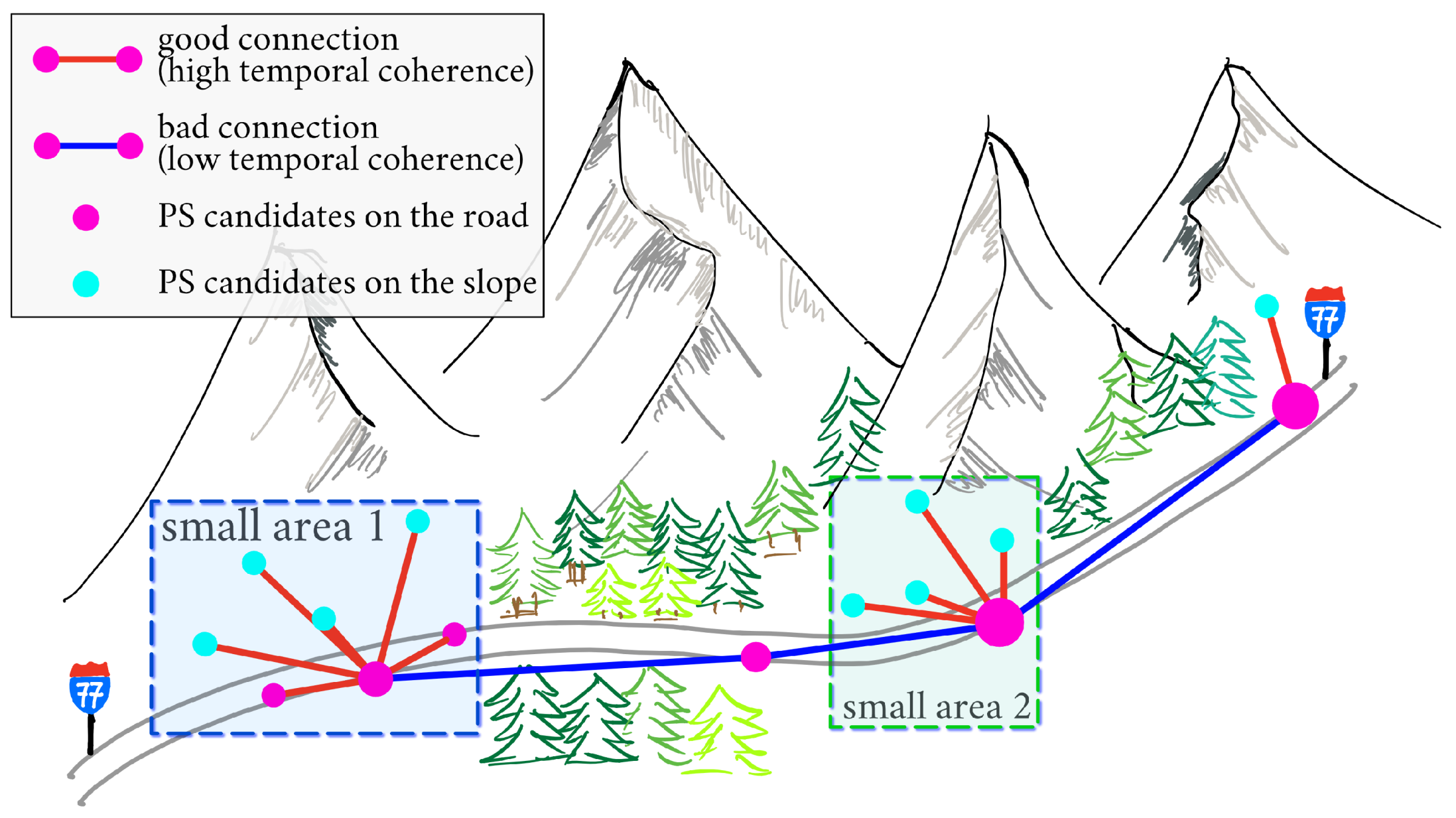
- Divide the AoI into smaller areas. Each small area is at most 1 to 2 kilometers. Do the MTInSAR processing (Section 3.4);
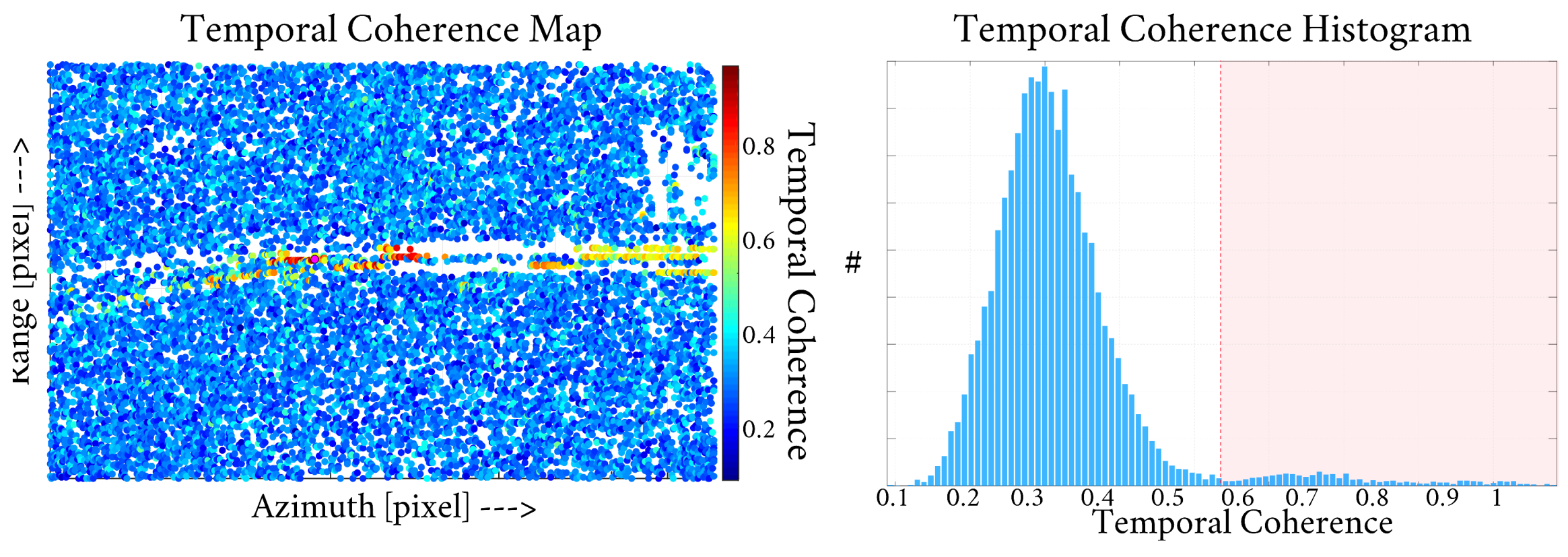
- Determine a suitable quality threshold based on the temporal coherence of the points (Section 3.4.3);
- Inspect the time series of output points. Signs of strong deformation are carefully studied, including also fieldwork as part of the validation;
- Deliver the result as the deformation map (to the Virginia Department of Transportation in this example).
3. Methodology
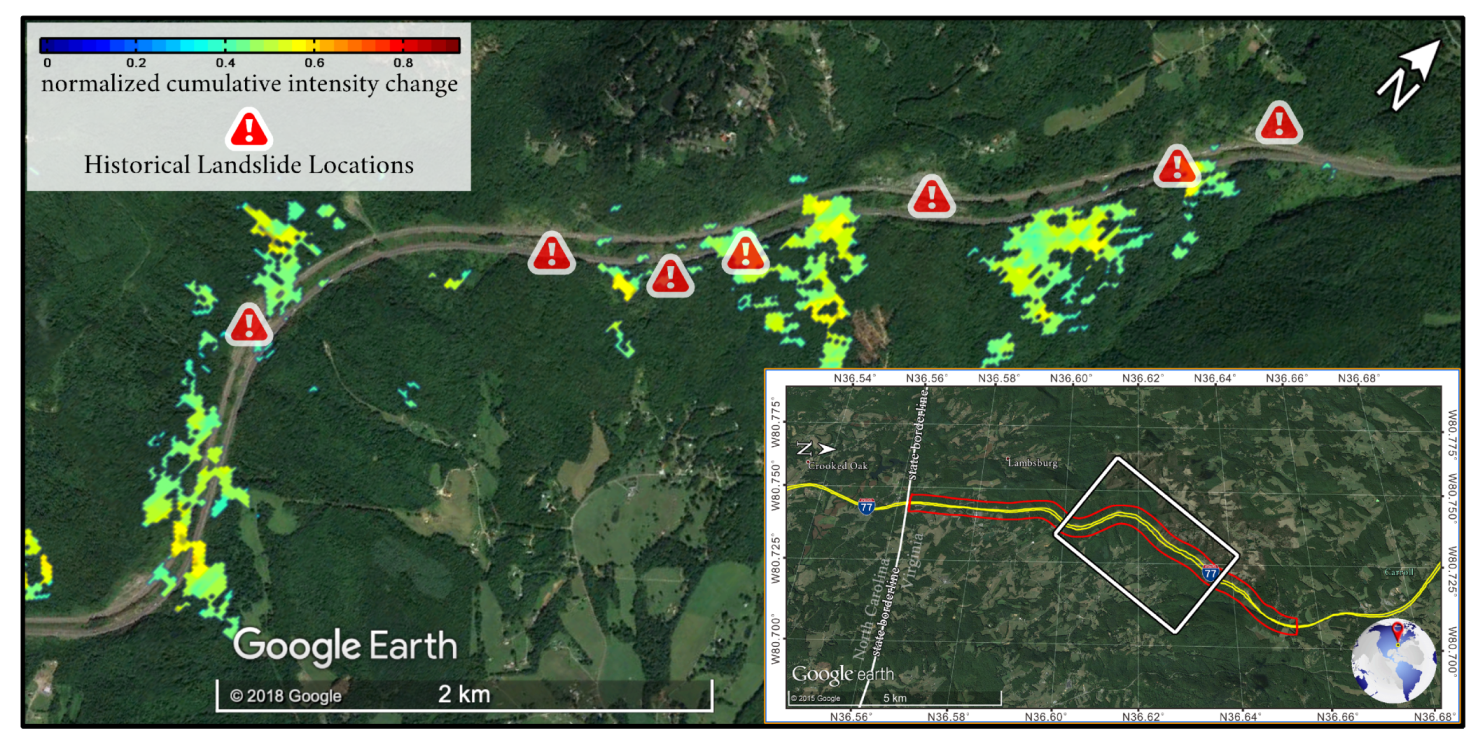
3.1. Cumulative Change Detection Map
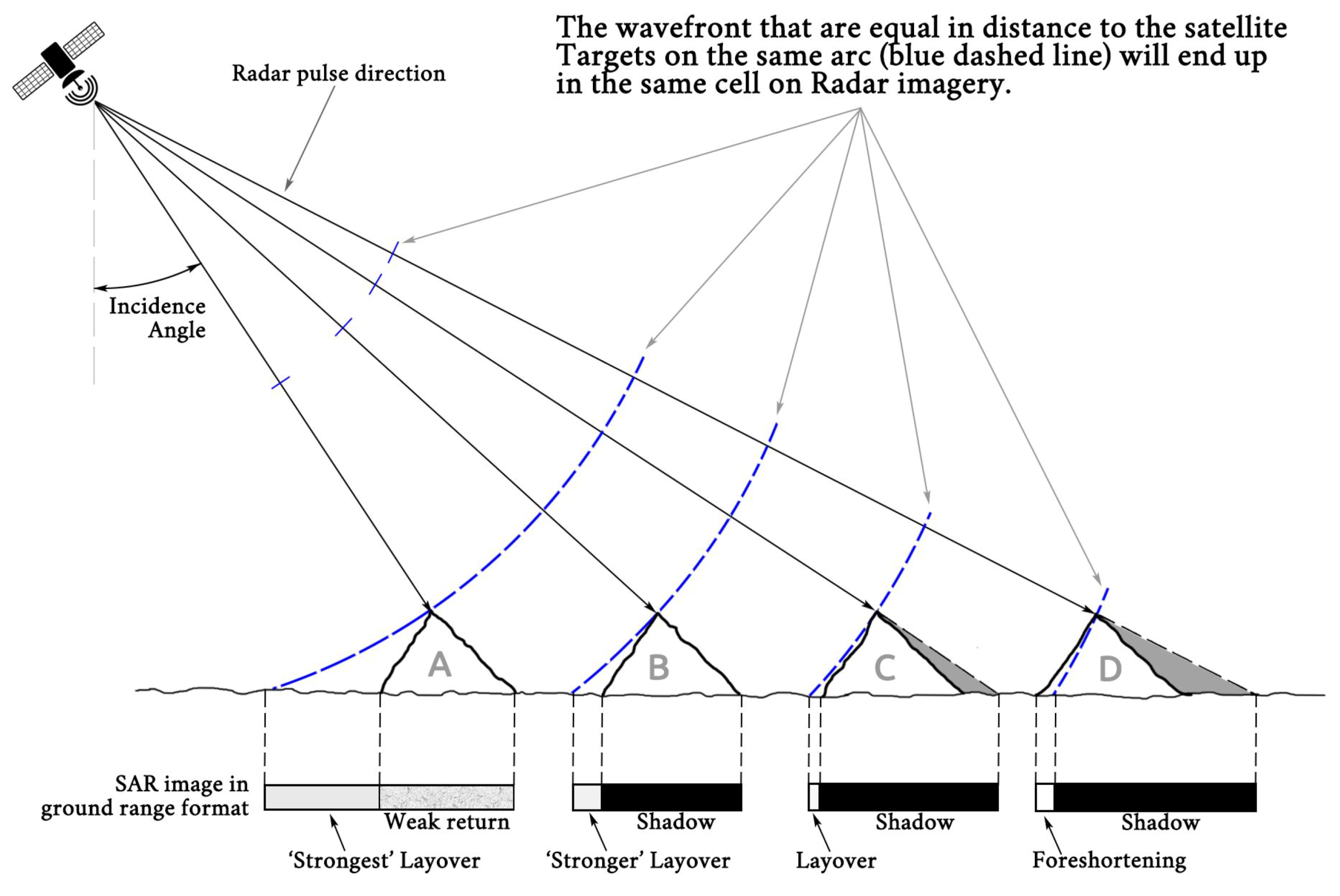
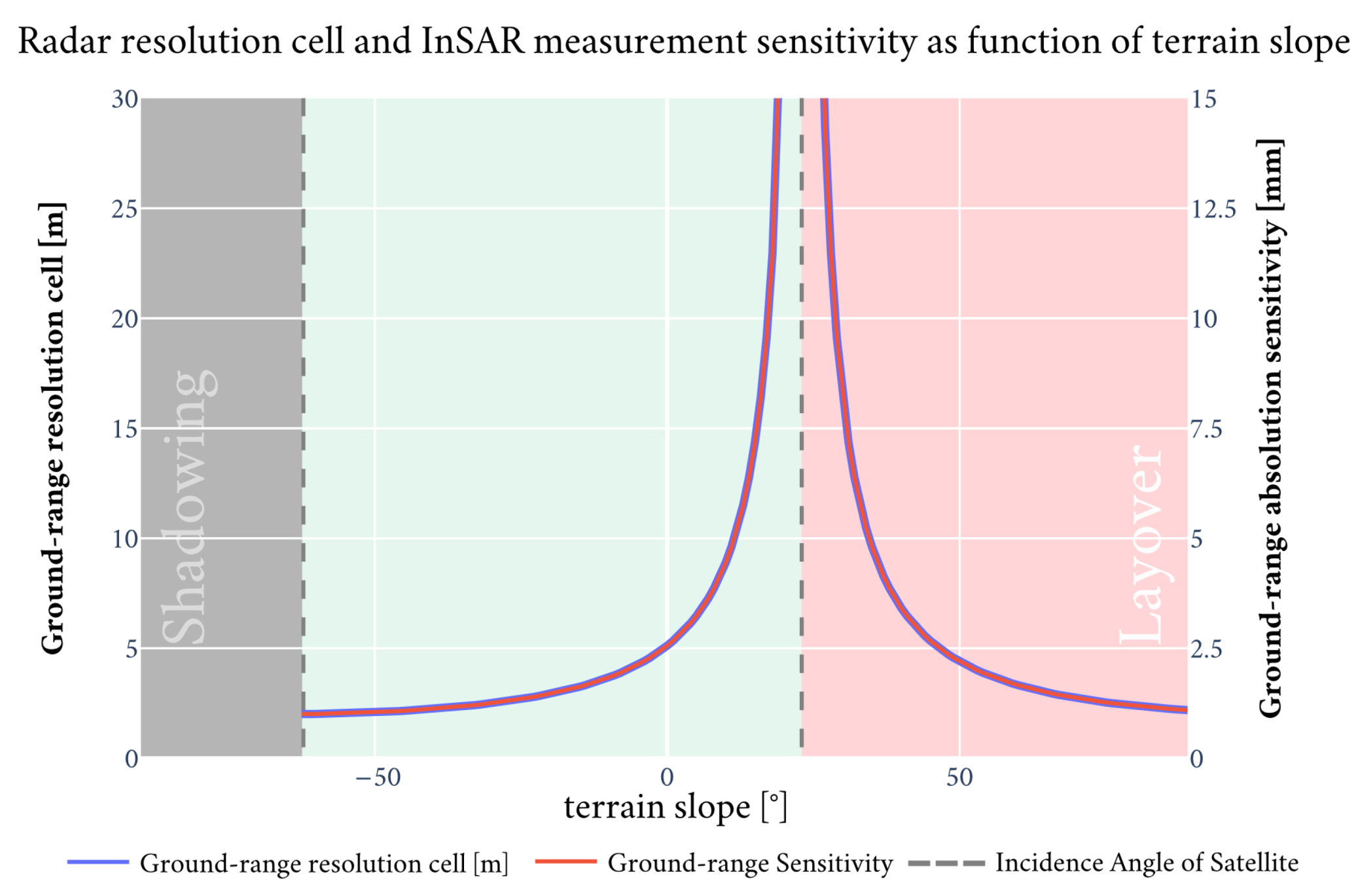
3.2. Geometric Distortion and Its Implication on InSAR
3.2.1. Why is Geometric Distortion Important for Monitoring Highway Slopes?
- decent ground-range resolution;
- decent sensitivity to movement in LOS direction;
- decent backscattered signal, or equivalently, signal to noise ratio.
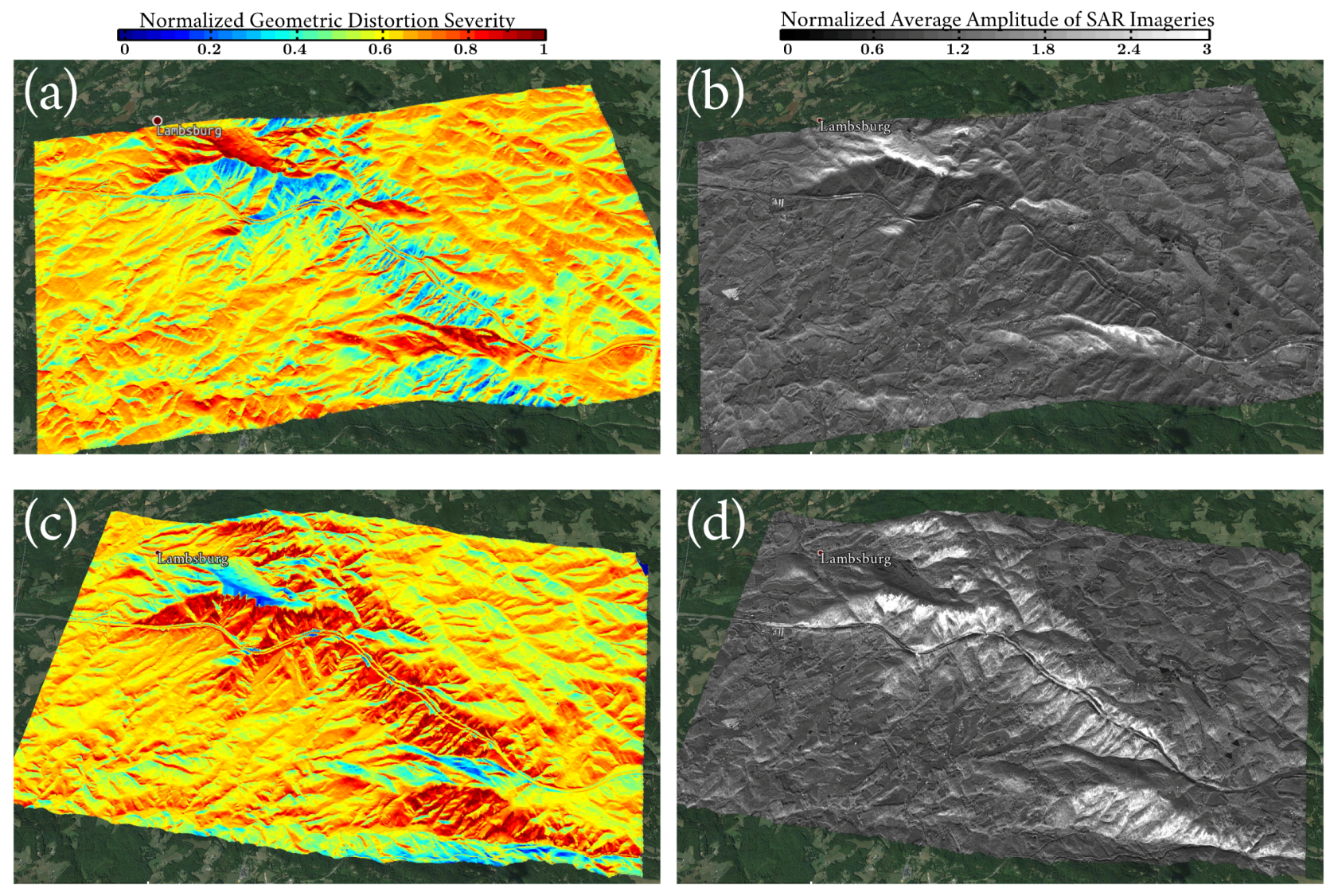
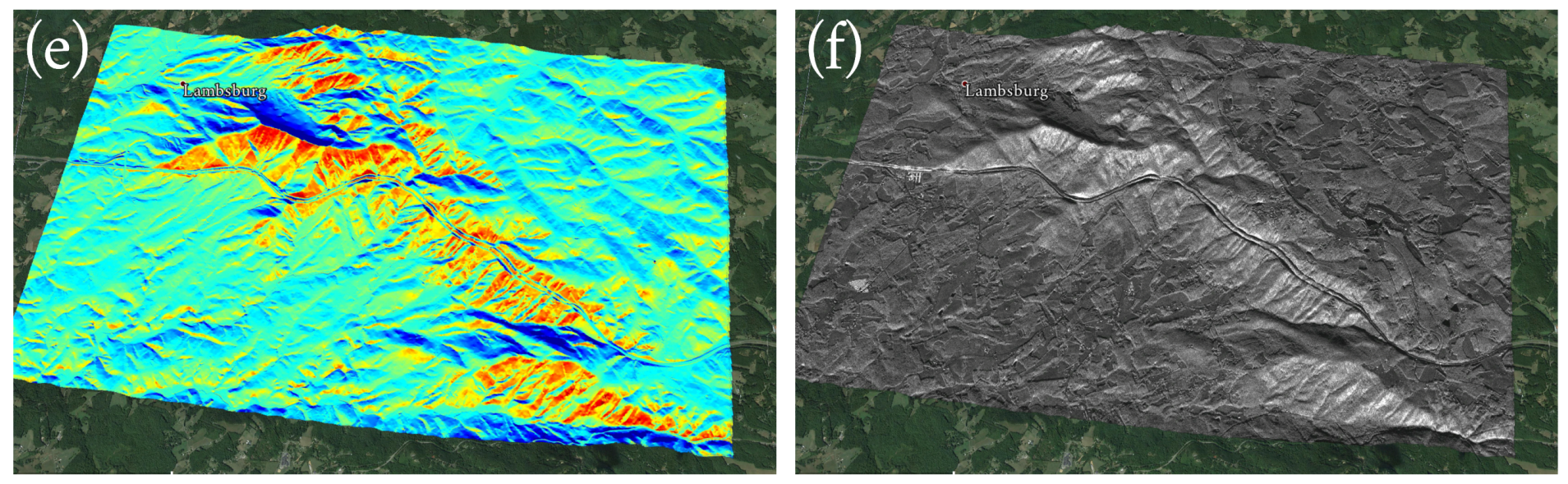
3.2.2. Simulation of Geometric Distortion
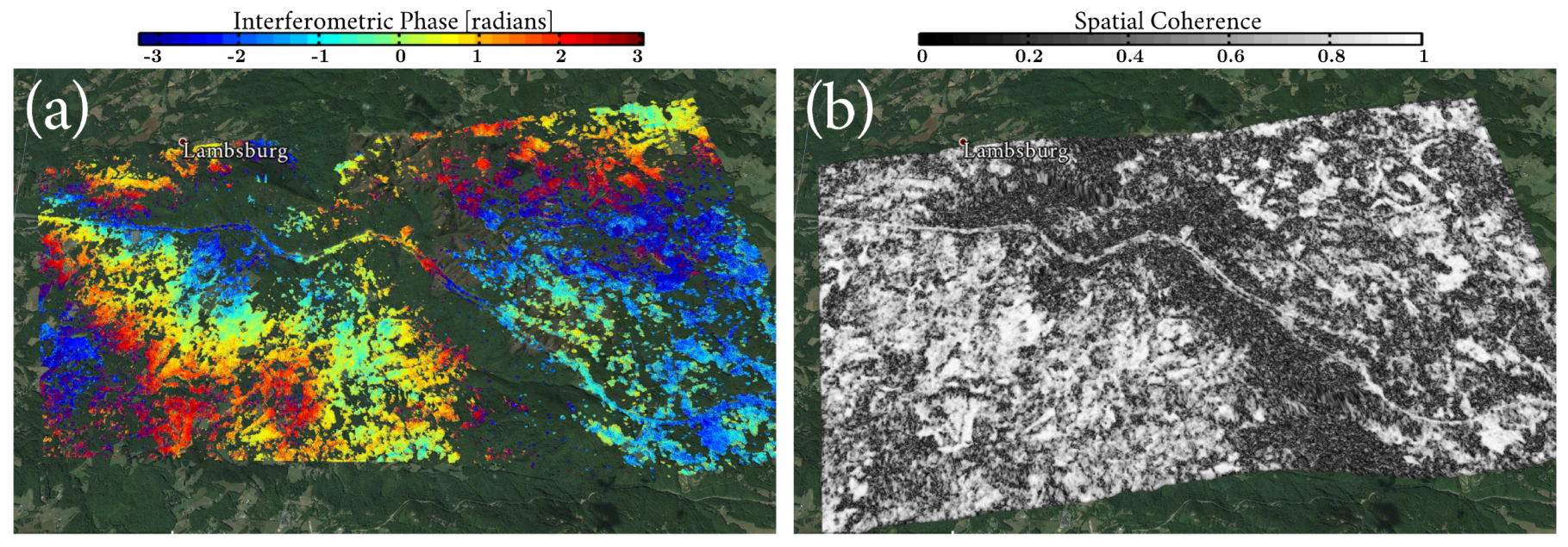
3.3. Quick Check with a Few Interferograms and Coherence Maps per Track
- From the intensity map and coherence map, we could check the correctness of the simulated geometric distortion map;
- From the interferogram and coherence map, we could check for the best coherence at the SoIs among all available options.
3.4. Multi-Temporal Time Series Analysis
3.4.1. Ignore the Atmospheric Effect in a Small Area
3.4.2. Non-Parametric Model for Non-Linear Movement
3.4.3. Selecting Temporal Coherence Threshold Value
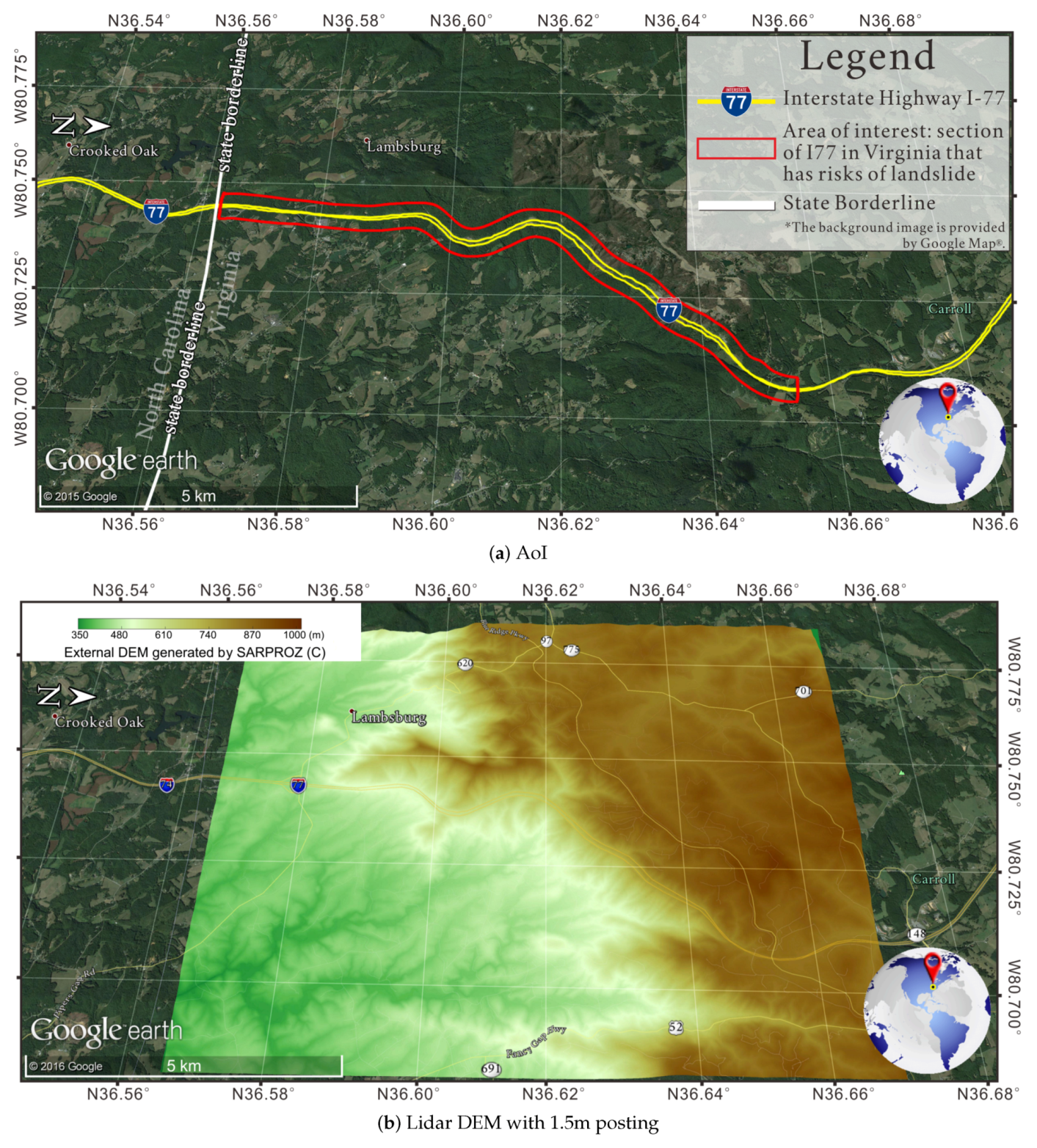
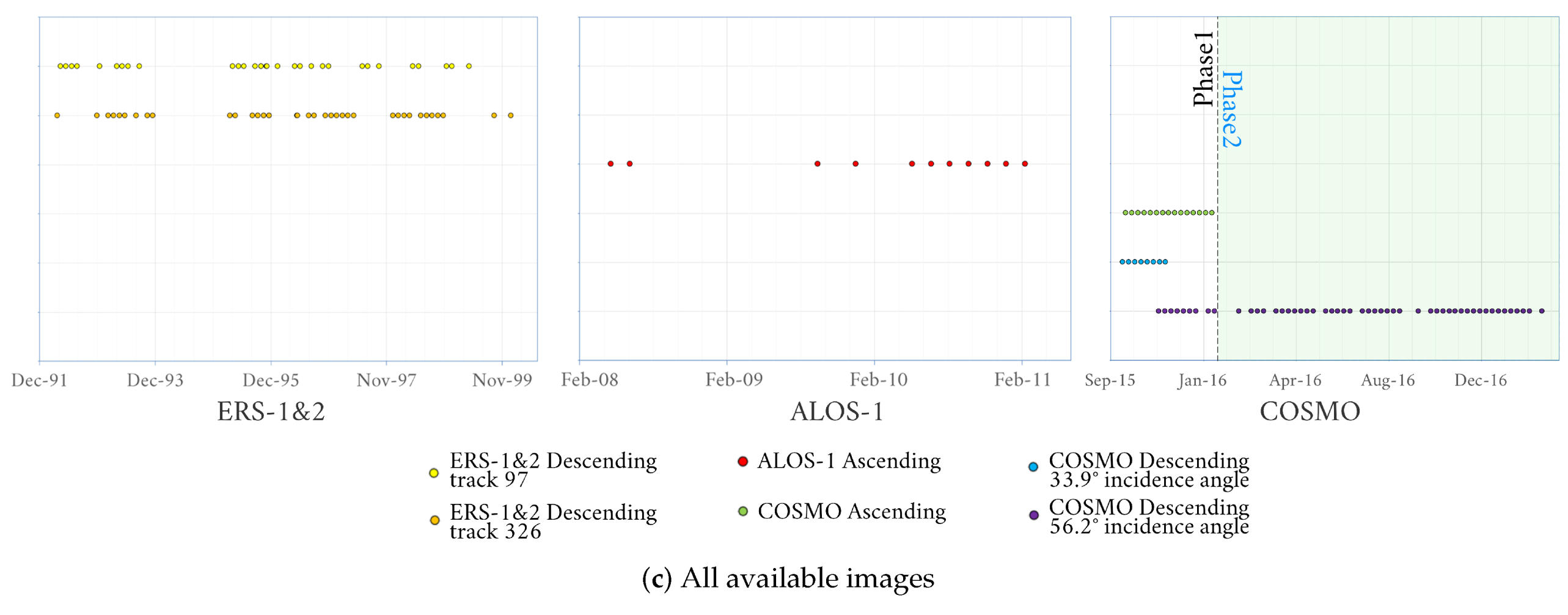
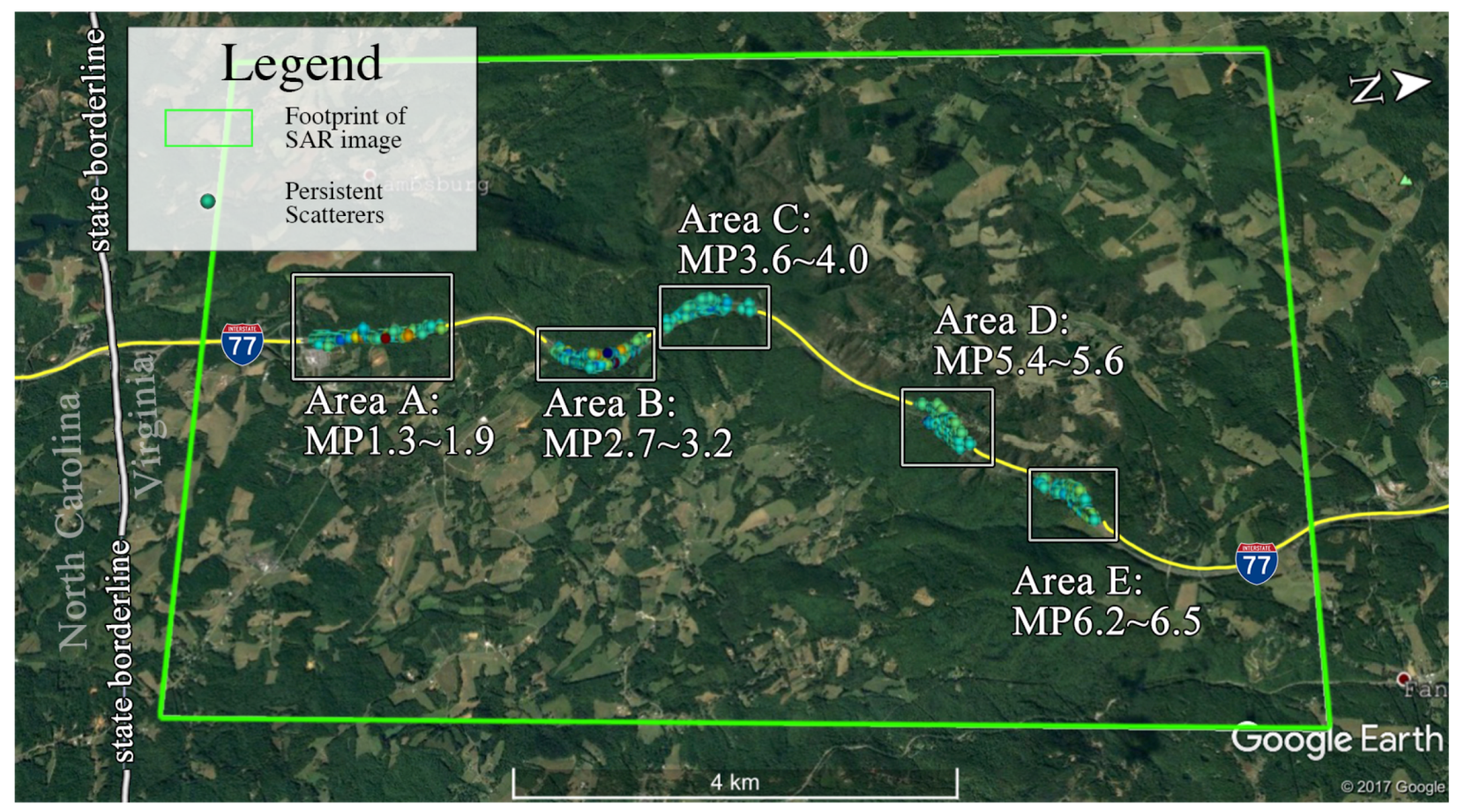
4. AoI and Available Images
5. Results
5.1. Phase 1: Analysis of Historical Data for Choosing the Best Configuration for the Monitoring Project
5.1.1. Intensity Change Map and Historical Landslide Locations
5.1.2. Simulated Geometric Distortion Map and Intensity Map
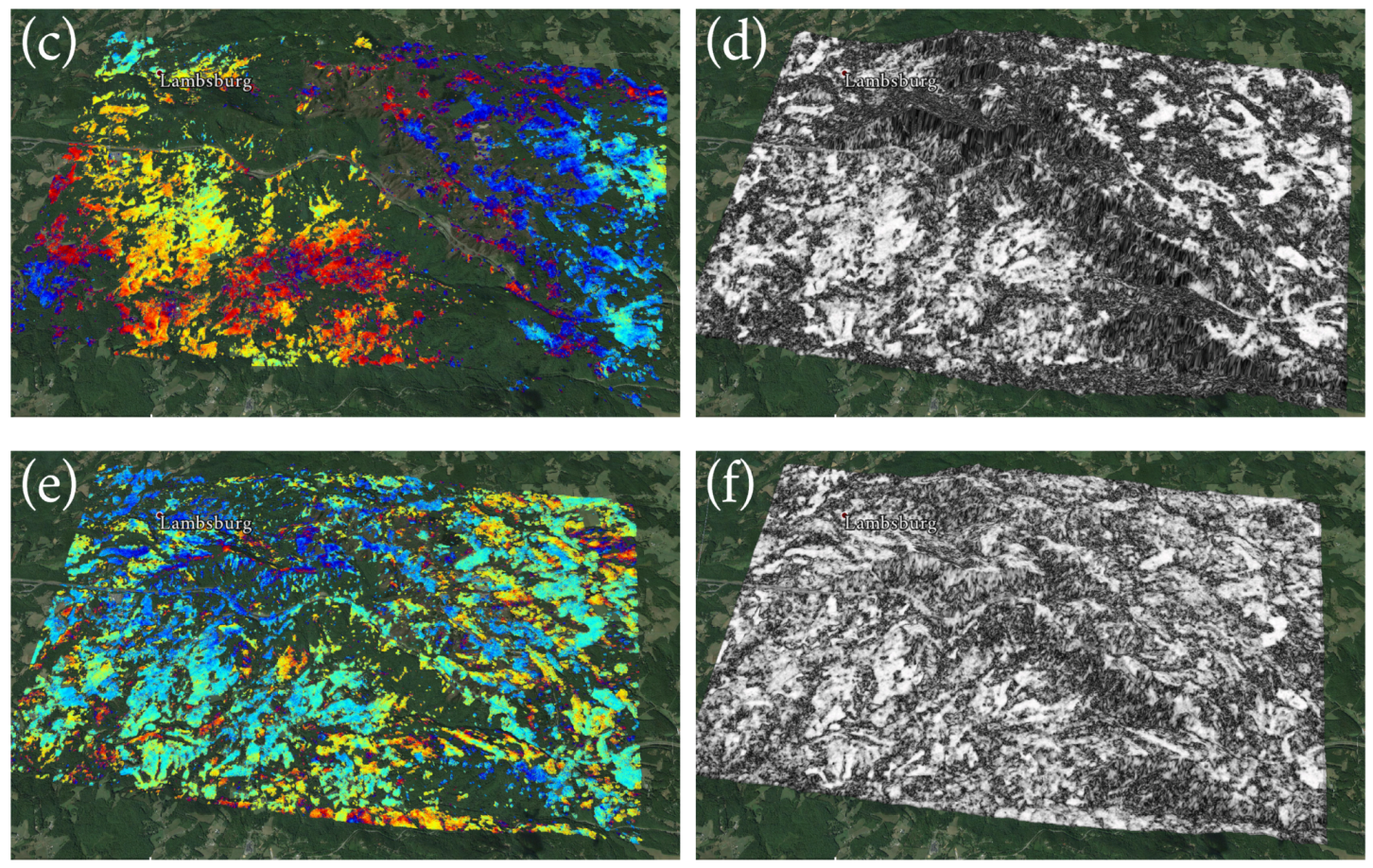
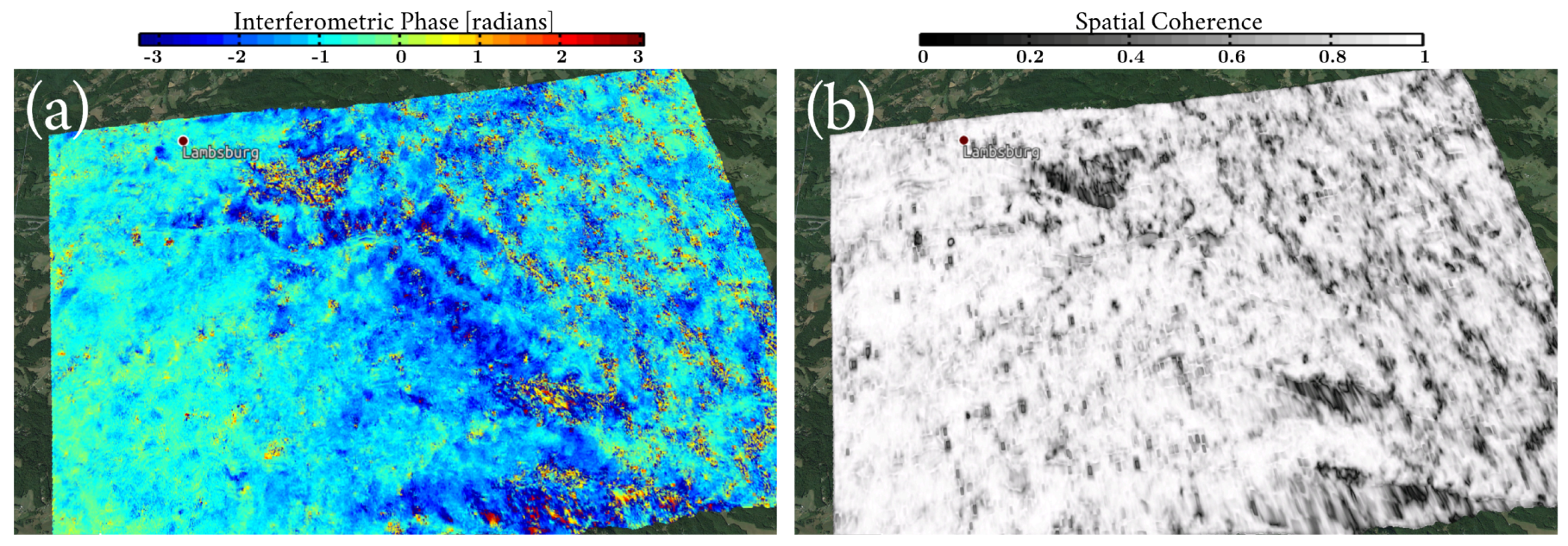
5.1.3. Interferograms and Coherence Maps
High Resolution X-band COSMO
Alternative: L-band
5.1.4. Assessment of Best Configuration
- What is the most suitable wavelength? From the interferograms, it is clear that L-band gives the best coherence. C-band ERS data does not give coherent interferograms (and thus we did not show any in this article). For the X-band COSMO-SkyMed, the worst performances should be expected in terms of interferometric coherence. Surprisingly, the results in this work prove that, notwithstanding the properties of the terrain (vegetation and steep slopes), it is still possible to obtain coherent interferograms at certain locations, i.e., the highway and the bare-rock slopes. The reason for such performances is the high resolution and the very short revisit time of the COSMO constellation, where the shorter revisit time compensated for the temporal decorrelation effect.Nevertheless, another point to consider is that X-band is more sensitive to movement than L-band. When the expected deformation rate is at the scale of a few millimeters per year, then X-band would be more sensitive to such movement than L-band.
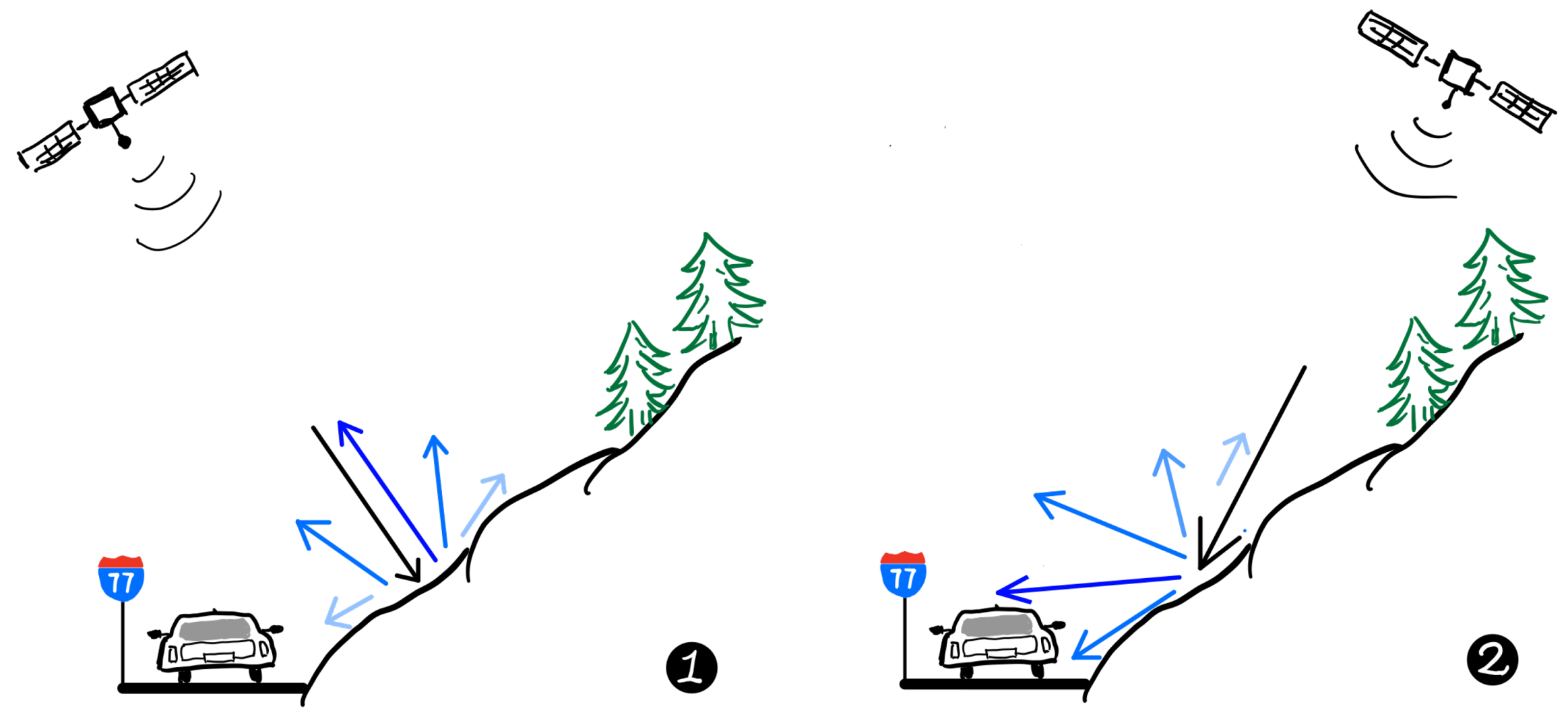
- What is the best option for the incidence angle? Based on simulations, it is clear that the descending orbit with 56.2 degrees incidence angle yields the slightest geometric distortion among all the descending tracks.
- What is a suitable revisit frequency? The coherence decay exponentially to revisit time [28]. L-band gives more coherence over vegetated areas, thus a longer revisit time could be accepted, i.e., 40 days or even longer. As for X-band, a much shorter revisit time is required to account for the temporal decorrelation. Based on the available interferograms, a suitable revisit time for the X-band should be much shorter than L-band. In this case, an 8-day-revisit-time for COSMO is proposed.
- Should one use ascending or descending data? In the comparison between COSMO descending and ascending, It is then clear that the descending track should be selected for giving higher SNR and coherence on the SoIs.
- What spatial/geolocalization resolution can be accepted for this project? This project monitors highways and the slopes. The scales of the two kinds are usually just a few meters to a few hundred. This means that the resolution should be at the scale of a few meters to give a sufficient number of points over the targets of interest. Out of all available dataset, the X-band high-resolution satellite (COSMO and TerraSAR-X) have the 3 m resolution, and the L-band ALOS-2 have the 3 to 10 m resolution.
- What approach should be used for processing? The ideal approach is the persistent scatterers approach. SBaS approach usually does a spatial multilook and filtering [8], hence downgrading the spatial resolution of the final result. PS approach, on the other hand, does not trade SNR for spatial resolution. This project already monitors very small areas, hence a spatial resolution downgrade is not recommended.
5.2. Phase 2: Multi-Temporal InSAR process
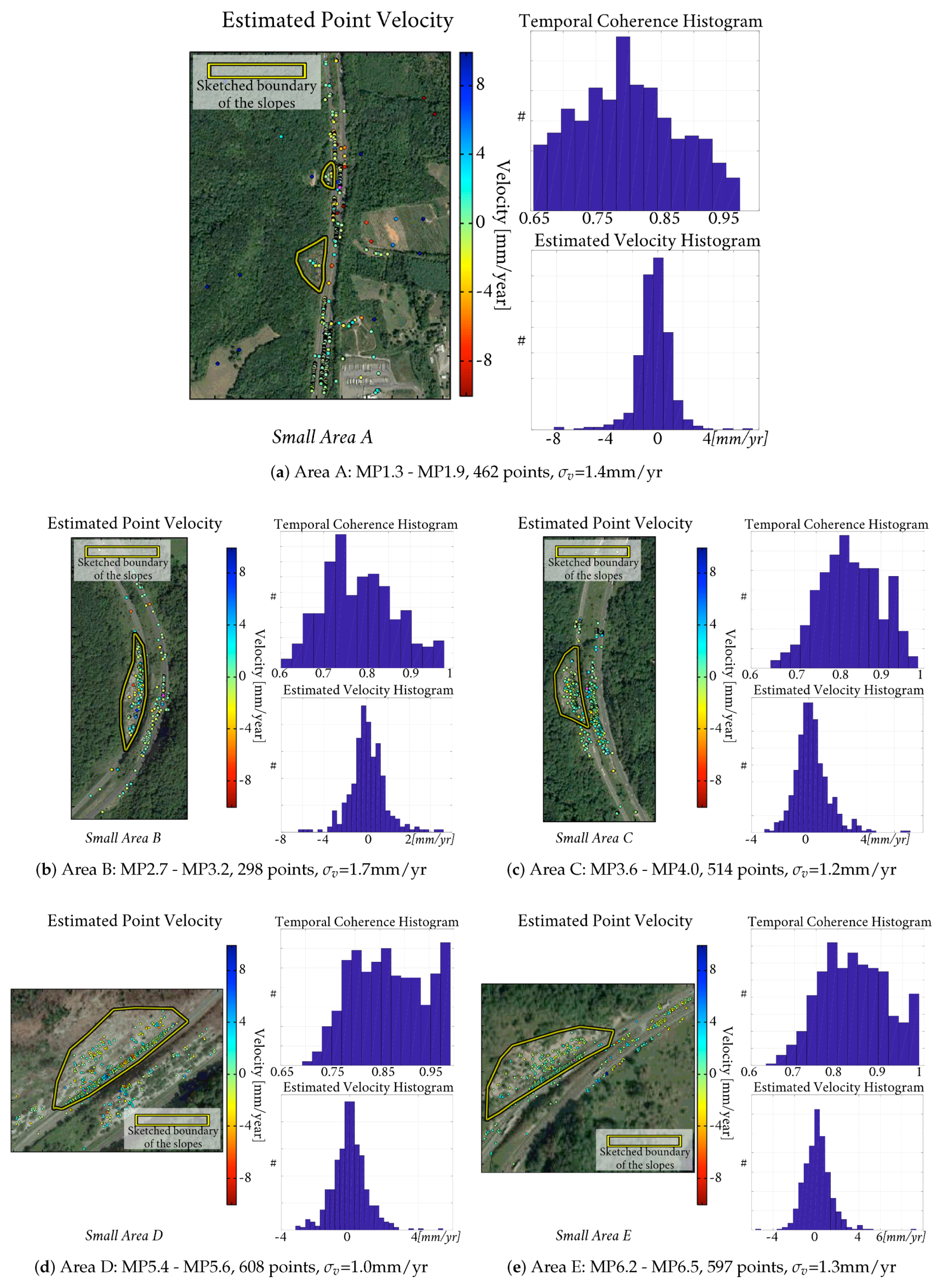
5.2.1. Overview of Small Areas
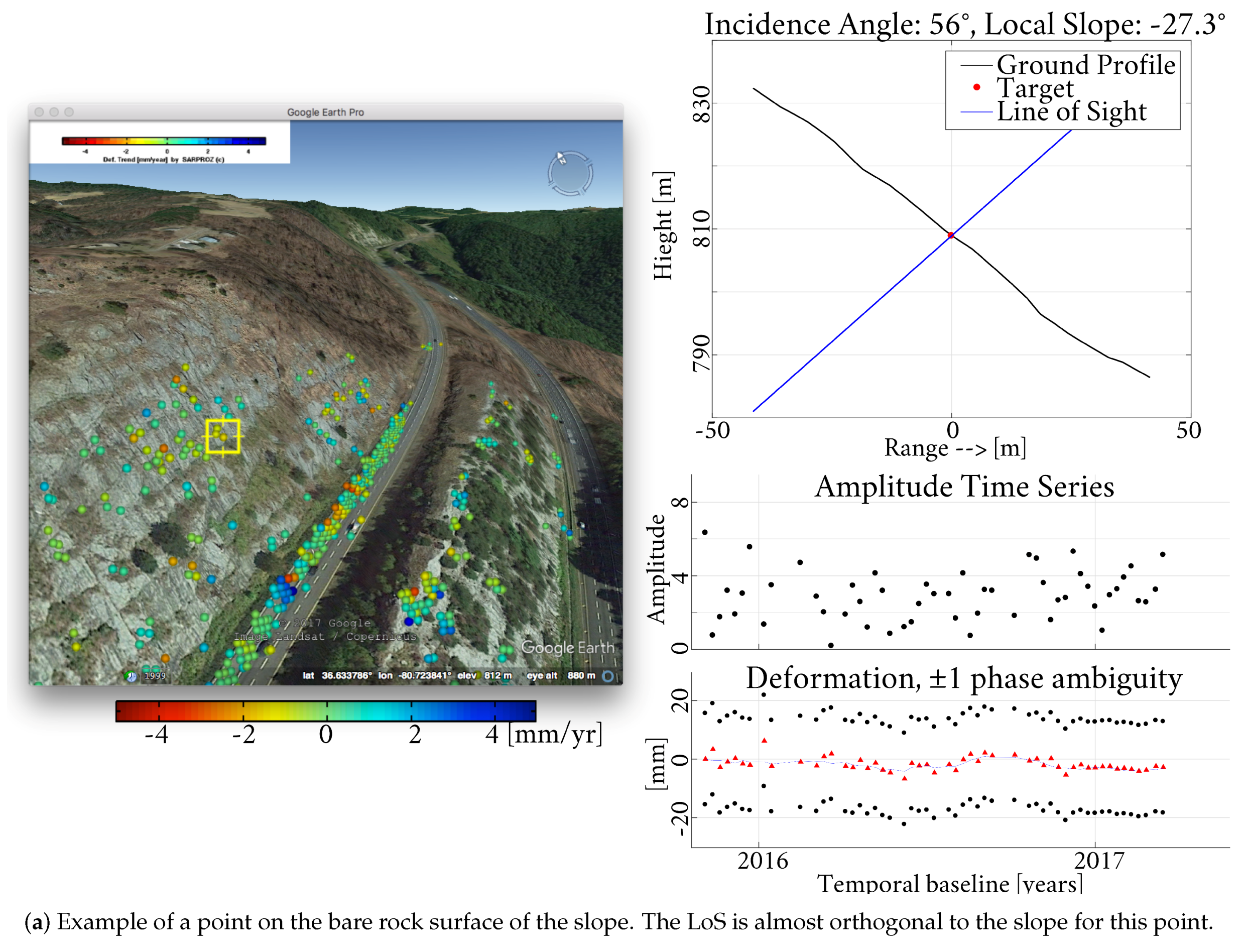
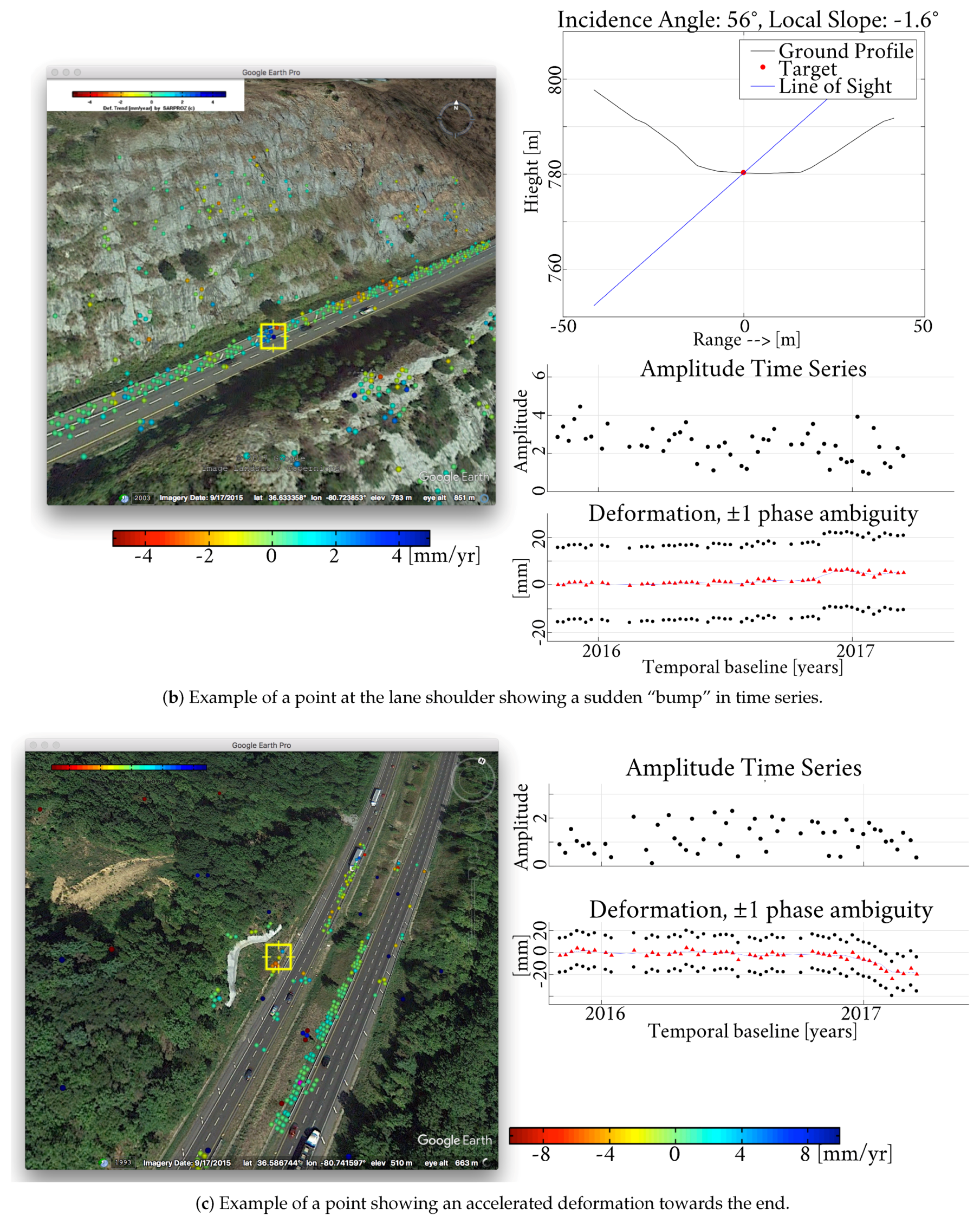
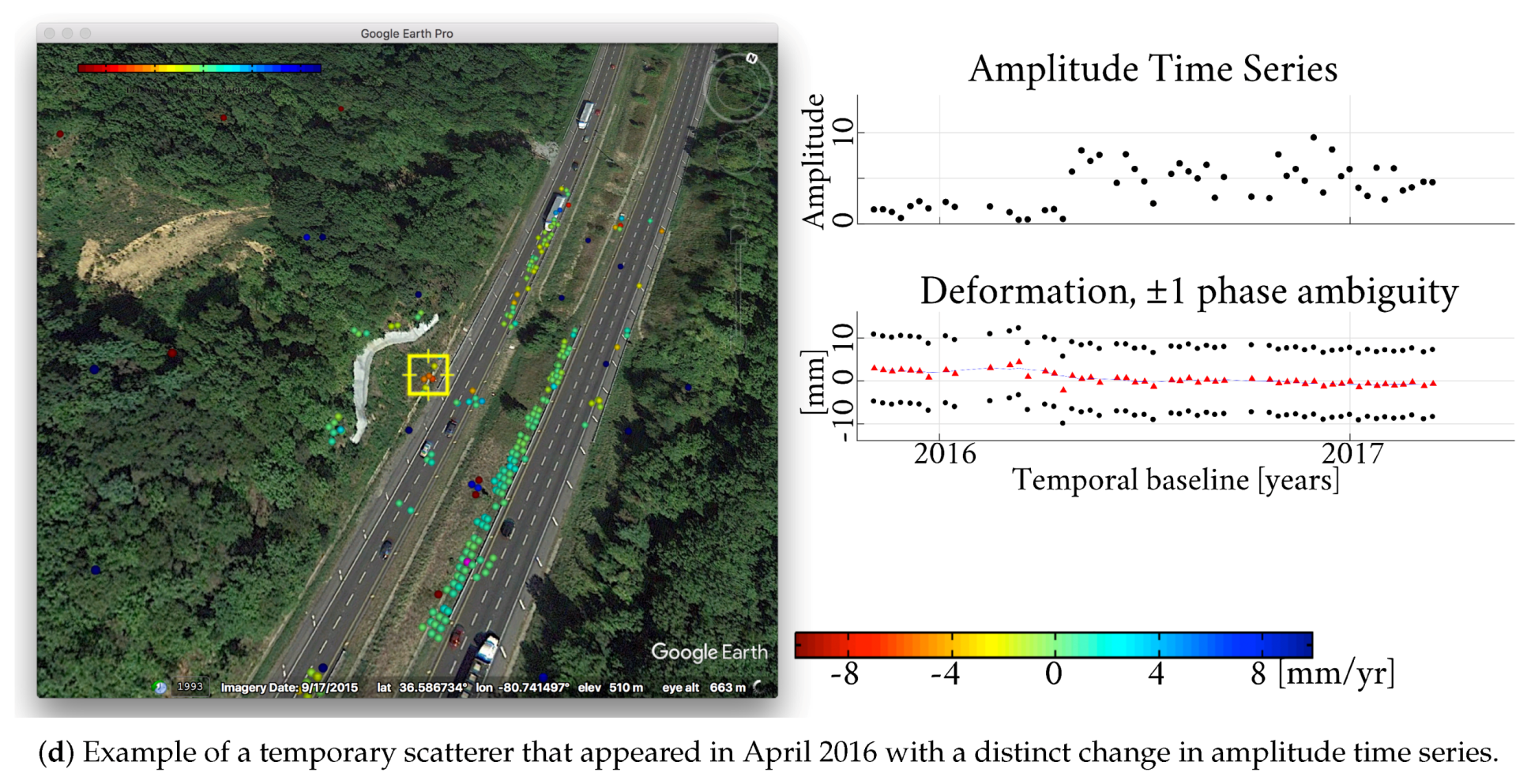
5.2.2. Some Representative PS Examples
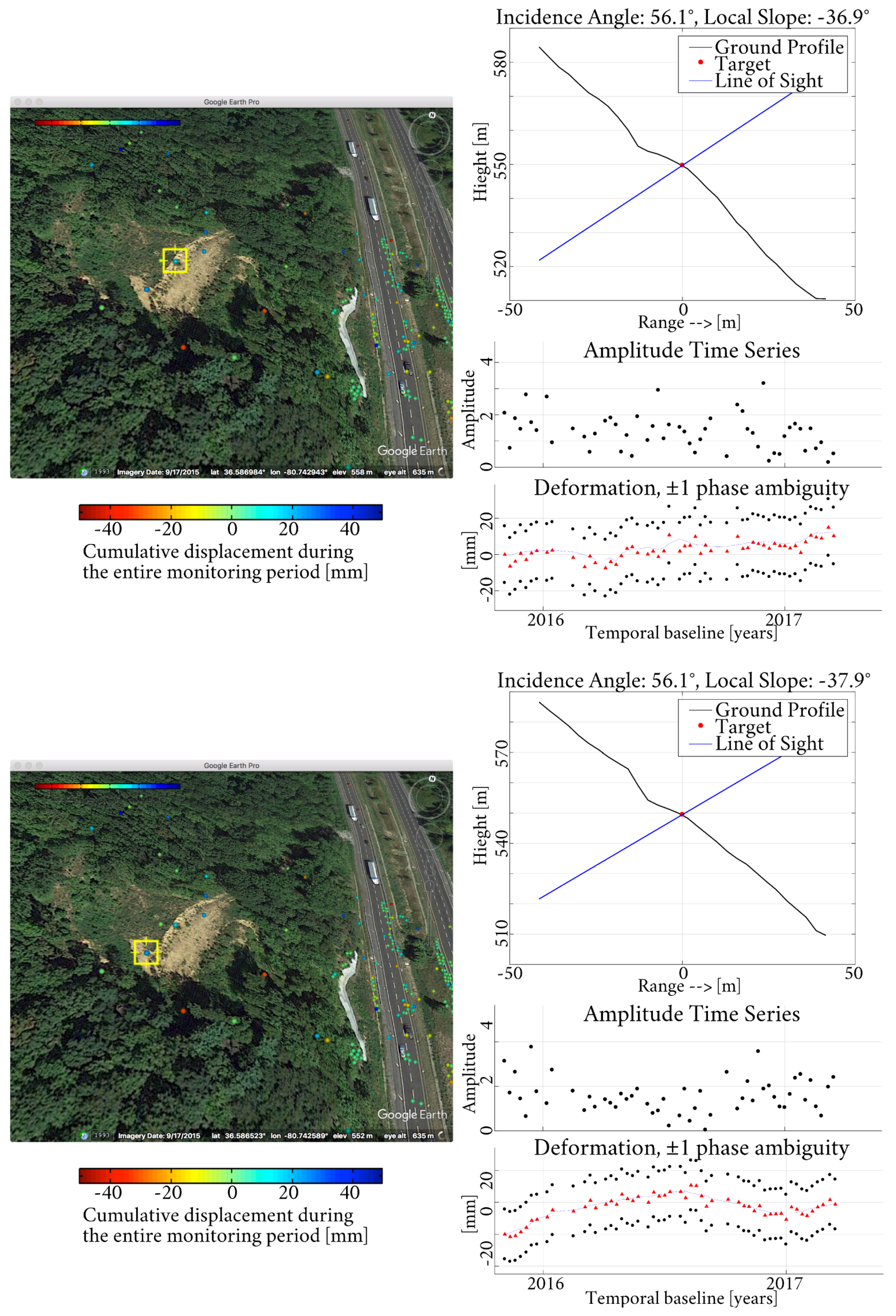
- The first point in Figure 14a is located on the slope and appears to be stable along LoS. However, the upper right part of Figure 14a shows that the LoS direction is almost orthogonal to the slope, inferring that the selected geometry is insensitive to any settlement along the slope. While we chose an incidence angle to avoid geometric distortion as much as possible, it was hard to avoid geometric distortion everywhere.
- The second point in Figure 14b is located at the foot of the hill. This point shows a sudden “bump” in time series but remains stable before and after the bump.
- The third point in Figure 15c is also located at the foot of the hill. Thanks to the non-linear approach mentioned in Section 3.4.2, we are able to detect such non-linear movement of the point. According to the field survey, this acceleration towards the end of the monitoring period is likely to be caused by the cracks in the concrete ditch. The cracks may be associated with some movement at the toe of the slope, or they may be caused by water erosion of surface soils.
- The last example in Figure 15d is a temporary scatterer that existed for only part of the monitoring period. A distinct change in amplitude time series is the characteristic of such temporary scatterers.
6. Interpretation and Field Works
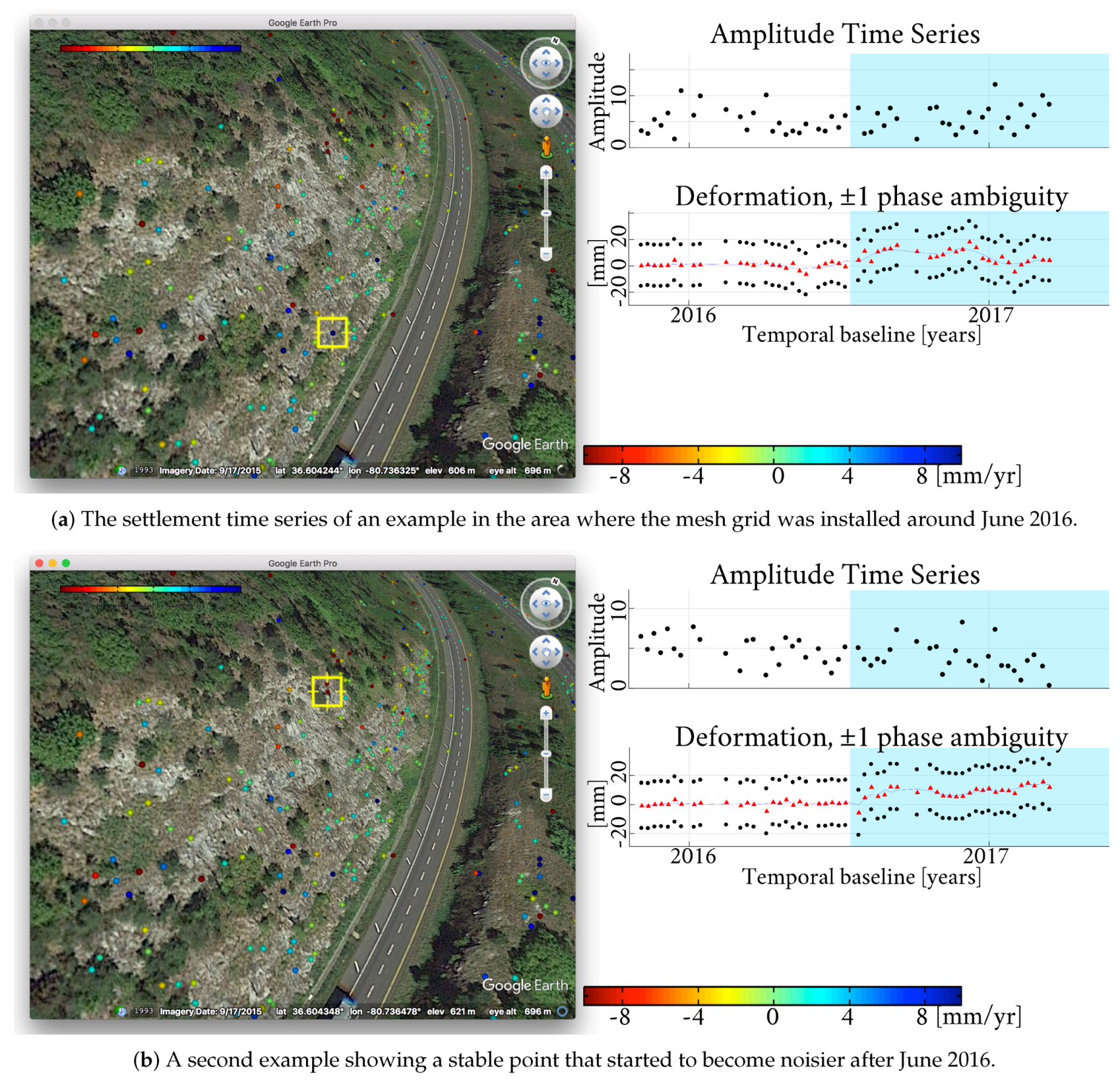
6.1. Case Study 1: Metal Mesh Installation Seen from InSAR
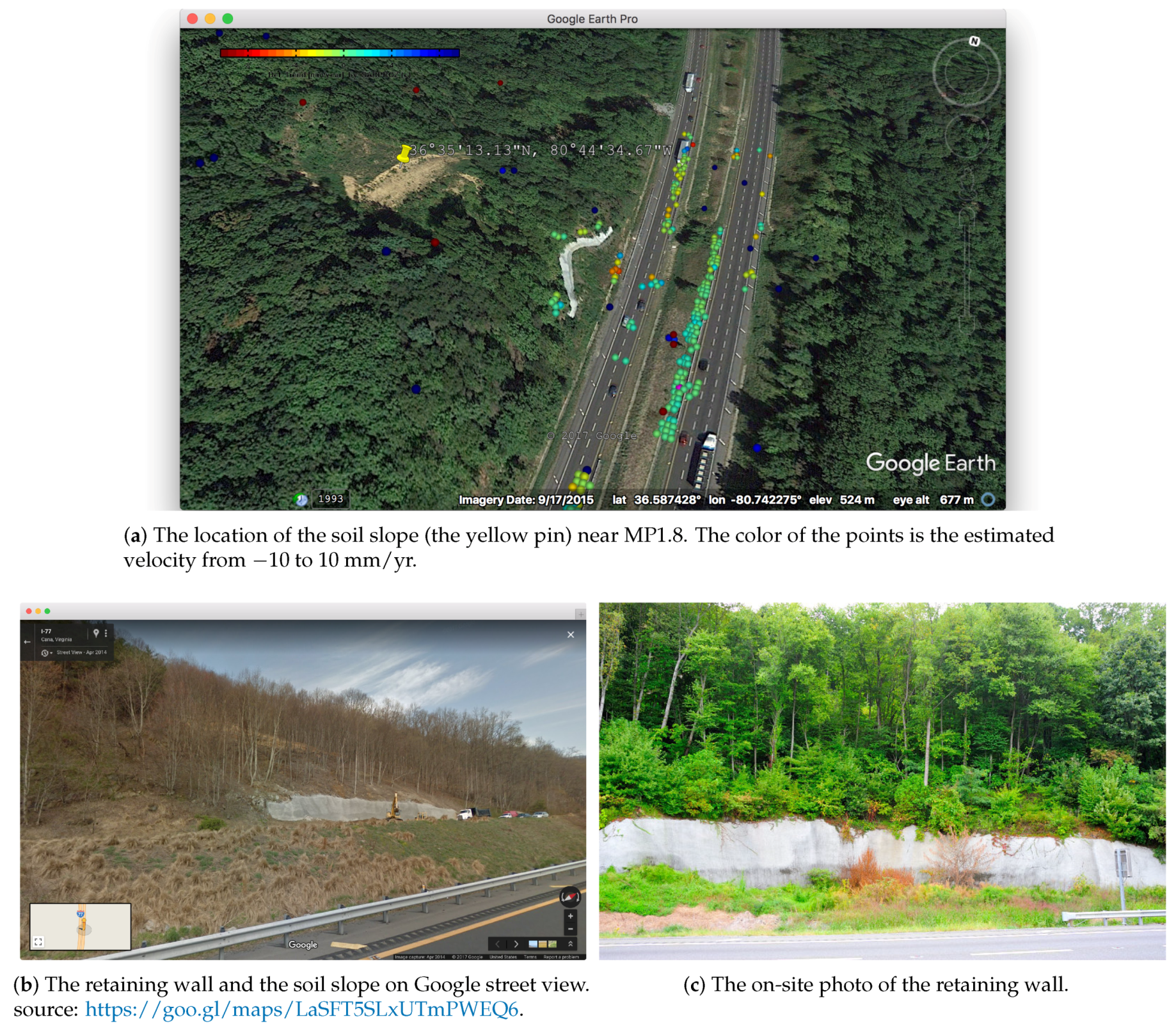
6.2. Case Study 2: The Soil Slope and the Retaining Wall at MP1.8 in Area A
6.2.1. The Slope at MP1.8
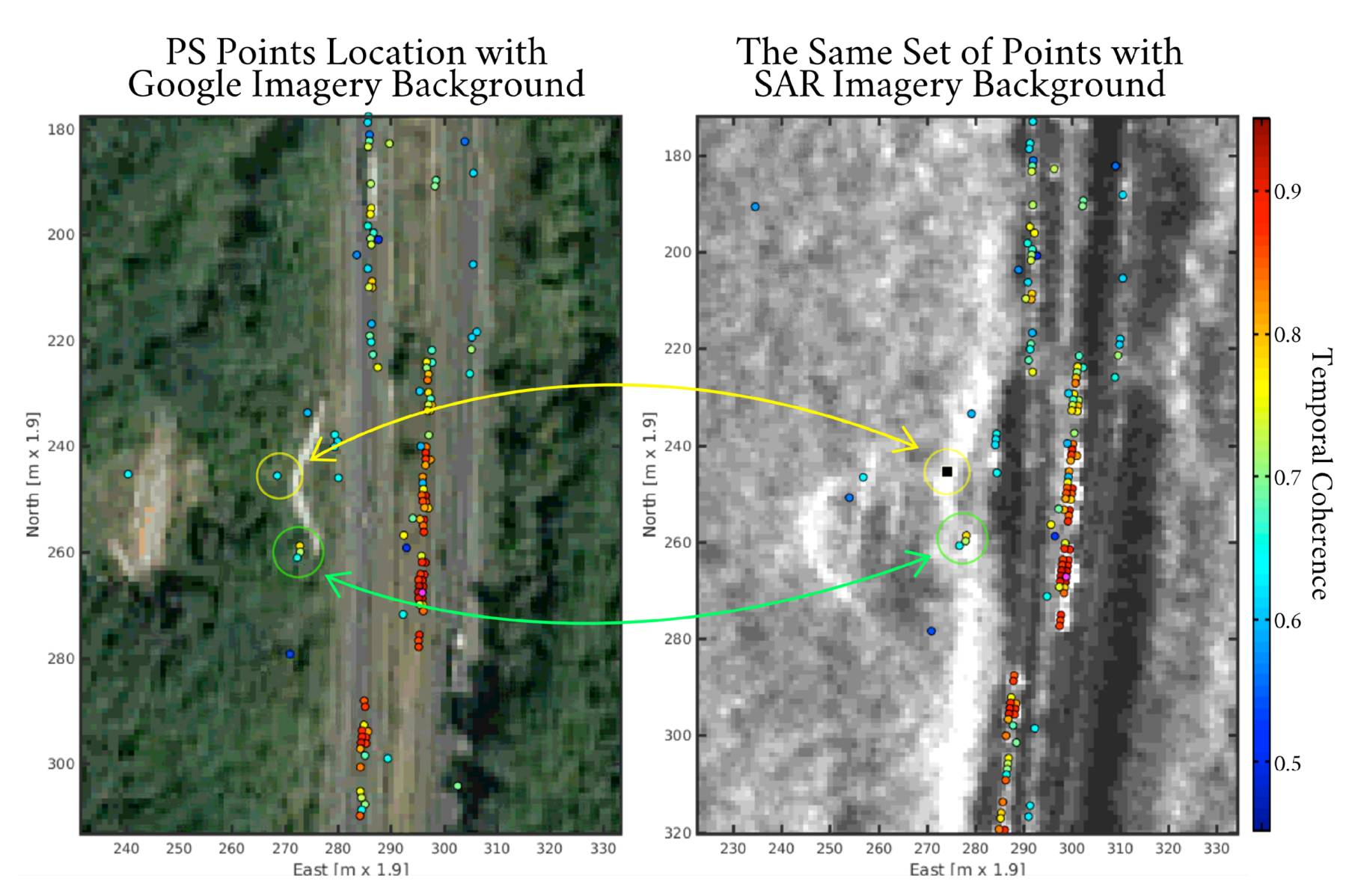
6.2.2. How Good Is the Geolocalization of the Points?
7. Discussion
7.1. How to Better Monitor the Slopes?
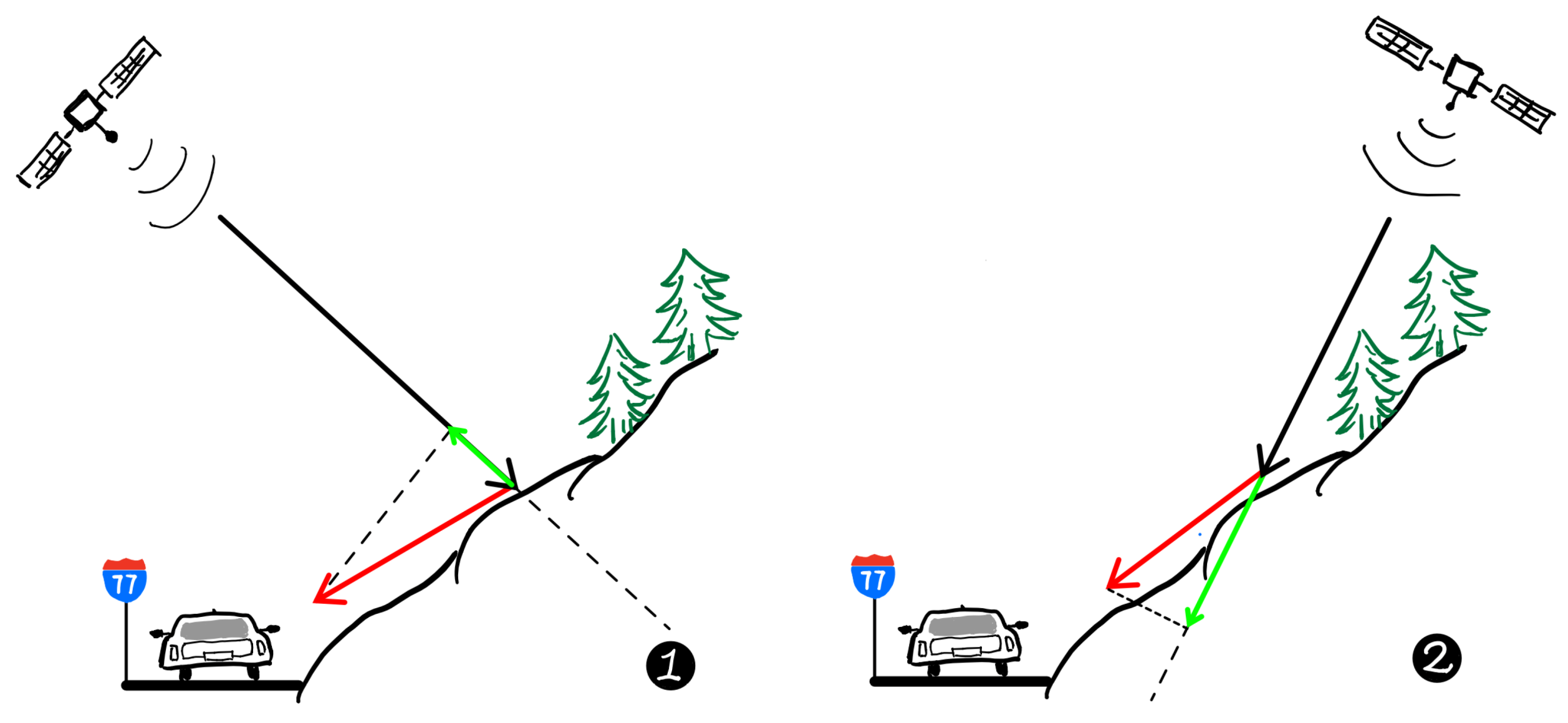
7.1.1. The Relationship between the Estimated Velocity and the Local Slope
7.1.2. A Possible Scheme for Soil Slope Monitoring: Installing Corner Reflectors
7.1.3. How to Improve the Soil Slope Monitoring Result from the Algorithm Side: A Comparison with Other State of Art Processing Techniques
7.2. Limitations and Applicability of InSAR Data for Slope Monitoring
7.2.1. One Size Cannot Fit All!
7.2.2. Comparison of InSAR and LiDAR for Deformation Monitoring
- Optimal geometry for measurement. While LiDAR and InSAR use different acquisition geometries, they require optimal geometry for specific targets. A bad geometry in InSAR results in a geometric distortion on the SAR image, while in LiDAR it leads to insufficient return signal for successful measurement.
- Processing of massive volumes of data and development of a fully automated deformation analysis method. Both techniques require processing massive amounts of data. The problem is to extract useful information and to develop an effective automated process for decision making.
- Sensitivity to land cover. Both systems tackle this problem differently. X-band radar requires larger patches of unobstructed ground and cannot penetrate tree canopies. LiDAR’s very narrow laser beam is usually more effective in penetrating vegetation, but extensive signal processing is still required.
- Independent from most weather conditions;
- Day/night measurement capability;
- No fieldwork required (this does not apply to ground-based InSAR though);
- Consistent satellite revisit times, typically every 8 to 11 days;
- Wide area coverage at any location on Earth. LiDAR provides point clouds over a relatively small area, while InSAR can provide a spatially complete map of ground deformations with millimeter to centimeter range accuracy. Typical coverage of one SAR image is on the order of 50 to 100 km square or rectangular. This approach allows for analyzing wide-area deformations. Moreover, with the InSAR technique, it is possible to detect displacements at locations where they are not anticipated, unlike in the case of geodetic techniques where (because of costs) measurements are performed only at locations suspected of undergoing deformations. When comparing the cost per unit area, InSAR can offer a more economical option when wide-area monitoring is required;
- High measurement accuracy. With the correct configuration, InSAR can reach a millimeter level accuracy, which is significantly better than airborne LiDAR systems, and most of the long-range and medium-range ground-based laser scanners. Significantly, the accuracy of InSAR technique is independent of the distance between the SAR satellite and the ground target;
- Access to historical data, allowing the analysis of past displacements. This capability is available with some radar satellites.
- InSAR data processing is more complex than LiDAR. Even though this technology is relatively well developed and the processing algorithms are very robust, it requires experienced personnel and sophisticated software to process and interpret data correctly;
- Signal phase ambiguity. The measured displacements are usually ambiguous because the phase is always wrapped between 0 and 2. The problem can be partially solved by the PSI method but only subject to certain assumptions;
- Resolution. There are some limitations of space-borne satellite SAR systems, including low temporal and spatial resolution and the inability of real-time monitoring. Currently, one way to overcome this limitation is by using a ground-based SAR system.
7.3. Next Step: More Satellites, Lower Costs
8. Conclusions
- Persistent Scatterer Interferometry can be used to monitor slope deformations. Analysis of spaceborne X-band data indicates that rock slopes can be monitored with millimeter precision. Coherent targets were detected on roads and rock slopes. No targets were detected over vegetated areas.
- No significant displacements were detected over the rocky slopes on the I-77 corridor during the period of study. These results were consistent with field observations conducted by VDOT maintenance personnel.
- Detection of soil slope displacement using X-band data has been proven to be challenging. Effective monitoring of soil slopes requires using longer radar wavelengths, such as C-band or L-band, or installing corner reflectors.
- Slope monitoring using satellite remote sensing involves the optimization of the acquisition geometry and radar signal wavelength. Project planning also requires input from local geologists to focus on potentially hazardous areas.
- The “one-size-fits-all” approach might not work well at every location for complex scenarios. This applies to both the hardware (satellite configurations) and the software (algorithms). The MTInSAR result could be improved by applying multiple sensors and adaptive algorithms for different SoIs.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Power, D.; Youden, J.; English, J.; Russell, K.; Croshaw, S.; Hanson, R. InSAR Applications for Highway Transportation Projects; Publication FHWA-CFL/TD-06-002, R-05-021-260; Federal Highway Administration, Central Federal Lands Highway Division: Vancouver, WA, USA, 2006.
- Ferretti, A.; Savio, G.; Barzaghi, R.; Borghi, A.; Musazzi, S.; Novali, F.; Prati, C.; Rocca, F. Submillimeter Accuracy of InSAR Time Series: Experimental Validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1142–1153. [Google Scholar] [CrossRef]
- Qin, Y.; Perissin, D. Monitoring Ground Subsidence in Hong Kong via Spaceborne Radar: Experiments and Validation. Remote Sens. 2015, 7, 10715–10736. [Google Scholar] [CrossRef] [Green Version]
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent Scatterer Interferometry: A review. ISPRS J. Photogramm. Remote Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The displacement field of the Landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Fialko, Y.; Sandwell, D.; Simons, M.; Rosen, P. Three-dimensional deformation caused by the Bam, Iran, earthquake and the origin of shallow slip deficit. Nature 2005, 435, 295–299. [Google Scholar] [CrossRef]
- Ahlborn, T.; Shuchman, R.; Sutter, L.; Brooks, C.; Harris, D.; Burns, J.; Endsley, K.; Evans, D.; Vaghefi, K.; Oats, R. An Evaluation of Commercially Available Remote Sensors for Assessing Highway Bridge Condition; Publication DTOS59-10-H-00001; Michigan Technological University, Michigan Tech Research Institute, Center for Automotive Research, Michigan Department of Transportation, Research and Innovative Technology Administration: Houghton, MI, USA, 2010. [Google Scholar]
- Acton, S. Sinkhole Detection, Landslide and Bridge Monitoring for Transportation Infrastructure by Automated Analysis of Interferometric Synthetic Aperture Radar Imagery; Technical Report RITARS-11-H-UVA; University of Virginia: Charlottesville, VA, USA, 2014. [Google Scholar]
- Wolf, R.E.; Bouali, E.H.; Oommen, T.; Dobson, R.; Vitton, S.; Brooks, C.; Lautala, P. Sustainable Geotechnical Asset Management Along the Transportation Infrastructure Environment Using Remote Sensing; Publication RITARS-14-H-MTU; Michigan Technological University: Houghton, MI, USA, 2015. [Google Scholar]
- Acton, S. InSAR Remote Sensing for Performance Monitoring of Transportation Infrastructure at the Network Level; Publication RITARS-14-H-UVA; University of Virginia: Charlottesville, VA, USA, 2016. [Google Scholar]
- Zebker, H.; McParland, M.A.; Kubanski, M.; Greene, F.; Eppler, J. Advanced Space-Based InSAR Risk Analysis of Planned and Existing Transportation Infrastructure; Publication OASRTRS-14-H-SUI; Stanford University, MDA Geospatial Service Incorporated, Office of the Assistant Secretary for Research and Technology: Stanford, CA, USA, 2017. [Google Scholar]
- Ferretti, A.; Monti-Guarnieri, A.; Prati, C.; Rocca, F.; Massonet, D. InSAR Principles—Guidelines for SAR Interferometry Processing and Interpretation. ESA Train. Man. 2007, 19, 1–48. [Google Scholar]
- Lillesand, T.M.; Kiefer, R.W.; Chipman, J.W. Remote Sensing and Image Interpretation, 7th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Champion, I. Simple modelling of radar backscattering coefficient over a bare soil: variation with incidence angle, frequency and polarization. Int. J. Remote Sens. 1996, 17, 783–800. [Google Scholar] [CrossRef]
- Mladenova, I.E.; Jackson, T.J.; Bindlish, R.; Hensley, S. Incidence Angle Normalization of Radar Backscatter Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1791–1804. [Google Scholar] [CrossRef]
- Widhalm, B.; Bartsch, A.; Goler, R. Simplified Normalization of C-Band Synthetic Aperture Radar Data for Terrestrial Applications in High Latitude Environments. Remote Sens. 2018, 10, 551. [Google Scholar] [CrossRef] [Green Version]
- Ketelaar, G.; Marinkovic, P.; Hanssen, R. Validation of Point Scatterer Phase Statistics in Multi-Pass INSAR. In Proceedings of the CEOS SAR Workshop, Ulm, Germany, 27–28 May 2004. [Google Scholar]
- Sun, Q.; Hu, J.; Zhang, L.; Ding, X. Towards Slow-Moving Landslide Monitoring by Integrating Multi-Sensor InSAR Time Series Datasets: The Zhouqu Case Study, China. Remote Sens. 2016, 8, 908. [Google Scholar] [CrossRef] [Green Version]
- Cigna, F.; Bateson, L.B.; Jordan, C.J.; Dashwood, C. Simulating SAR geometric distortions and predicting Persistent Scatterer densities for ERS-1/2 and ENVISAT C-band SAR and InSAR applications: Nationwide feasibility assessment to monitor the landmass of Great Britain with SAR imagery. Remote Sens. Environ. 2014, 152, 441–466. [Google Scholar] [CrossRef] [Green Version]
- Perissin, D. Interferometric SAR Multitemporal Processing: Techniques and Applications. In Multitemporal Remote Sensing; Ban, Y., Ed.; Springer International Publishing: Cham, Switzerland, 2016; Volume 20, pp. 145–176. [Google Scholar] [CrossRef]
- Milillo, P.; Perissin, D.; Salzer, J.T.; Lundgren, P.; Lacava, G.; Milillo, G.; Serio, C. Monitoring dam structural health from space: Insights from novel InSAR techniques and multi-parametric modeling applied to the Pertusillo dam Basilicata, Italy. Int. J. Appl. Earth Obs. Geoinform. 2016, 52, 221–229. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Tinsley, R.; Lee, D.; Pence, W.; Higgs, T. Clearing the Fog on the Aging I-77 Rock Slopes. In Proceedings of the 43rd Annual Southeastern Transportation Geotechnical Engineering Conference (STGEC), Richmond, VA, USA, 22–25 October 2012. [Google Scholar]
- Tinsley, R.; Artman, L.; Lee, D.; Pence, W.; Higgs, T. Prioritization of Aging Rock Slopes on I-77. In Proceedings of the 13th Annual Geohazards and ITGUAM Technical Forum, Harrisonburg, VA, USA, 30 July–1 August 2013. [Google Scholar]
- Rocca, F. Modeling Interferogram Stacks. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3289–3299. [Google Scholar] [CrossRef]
- Revision, F. PALSAR-2 Level 1.1/2.1/1.5/3.1 CEOS SAR Product Format Description; Technical Report; Japan Aerospace Exploration Agency: Tokyo, Japan, 2016.
- Williams, T. Fence flown in to fix falling rocks near Fancy Gap on I-77. Roanoke Times, 28 June 2016. [Google Scholar]
- Samiei-Esfahany, S.; Martins, J.E.; van Leijen, F.; Hanssen, R.F. Phase Estimation for Distributed Scatterers in InSAR Stacks Using Integer Least Squares Estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef] [Green Version]
- Samiei-Esfahany, S. Exploitation of Distributed Scatterers in Synthetic Aperture Radar Interferometry. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Perissin, D.; Wang, T. Repeat-Pass SAR Interferometry With Partially Coherent Targets. IEEE Trans. Geosci. Remote Sens. 2012, 50, 271–280. [Google Scholar] [CrossRef]
- Chang, L.; Hanssen, R.F. A Probabilistic Approach for InSAR Time-Series Postprocessing. IEEE Trans. Geosci. Remote Sens. 2016, 54, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Morishita, Y.; Hanssen, R.F. Temporal Decorrelation in L-, C-, and X-band Satellite Radar Interferometry for Pasture on Drained Peat Soils. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1096–1104. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Ogundare, J.O. Deformation Monitoring and Analysis: High-Definition Survey and Remote Sensing Techniques. In Precision Surveying; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; pp. 329–376. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | COSMO | COSMO | COSMO | ALOS-1 | ERS-1&2 (track 326) | ERS-1&2 (Track 97) |
|---|---|---|---|---|---|---|
| Range Resolution (m) | 3 | 3 | 3 | 10 | 30 | 30 |
| Orbit Pass | Descending | Descending | Ascending | Ascending | Descending | Descending |
| Band | X | X | X | L | C | C |
| Wavelength (mm) | 31 | 31 | 31 | 236 | 56 | 56 |
| Revisit days | 8 | 8 | 8 | 46 | 35 ** | 35 |
| Incidence angle | 56.2 | 33.9 | 32.2 | 34.4 | 23.3 | 23.3 |
| Image No. | 10/62 * | 11 | 17 | 11 | 39 | 31 |
| Start Date | 11/04/2015 | 05/05/2015 | 04/23/2015 | 05/09/2008 | 04/19/1992 | 04/19/1992 |
| End Date | 03/06/2017 | 11/21/2015 | 01/12/2016 | 02/15/2011 | 01/12/2000 | 01/12/2000 |
| Still Operative | Yes | Yes | Yes | No | No | No |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Hoppe, E.; Perissin, D. Slope Hazard Monitoring Using High-Resolution Satellite Remote Sensing: Lessons Learned from a Case Study. ISPRS Int. J. Geo-Inf. 2020, 9, 131. https://doi.org/10.3390/ijgi9020131
Qin Y, Hoppe E, Perissin D. Slope Hazard Monitoring Using High-Resolution Satellite Remote Sensing: Lessons Learned from a Case Study. ISPRS International Journal of Geo-Information. 2020; 9(2):131. https://doi.org/10.3390/ijgi9020131
Chicago/Turabian StyleQin, Yuxiao, Edward Hoppe, and Daniele Perissin. 2020. "Slope Hazard Monitoring Using High-Resolution Satellite Remote Sensing: Lessons Learned from a Case Study" ISPRS International Journal of Geo-Information 9, no. 2: 131. https://doi.org/10.3390/ijgi9020131
APA StyleQin, Y., Hoppe, E., & Perissin, D. (2020). Slope Hazard Monitoring Using High-Resolution Satellite Remote Sensing: Lessons Learned from a Case Study. ISPRS International Journal of Geo-Information, 9(2), 131. https://doi.org/10.3390/ijgi9020131