1. Introduction
Many cities look at bicycles as an alternative for cars for short or even medium distance trips (up to 10 km for normal bikes, up to 20 km for electric bikes) in order to deal with the external effects of the car like traffic congestion, emissions, traffic noise, safety, etc. Important aspects to tempt people to increase their bicycle use are safety, comfort (infrastructure) as well as speed and directness. Already in 1993, the Federal Highway Administration mentions ‘Distance/Time’ as one of the primary impediments to bicycling, annotating that distinction should be made between real distance and perceived distance, indicating that the perception of trip distance can be affected by subjective aspects concerning safety (traffic volume, traffic speed, bike facilities, etc.) and comfort (presence of stop signs or traffic lights, type and quality of the pavement, etc.) [
1].
The impact of stops and delays during bicycle trips has been illustrated in various studies, showing the value of time for cyclists to be twice [
2] or even three times [
3] as high as the value of time on other modes. This can be explained by the greater effort involved with stopping and re-starting and the more hazardous and unattractive travelling conditions (e.g., sensitivity to weather conditions). An analysis of the specific impact of waiting at signalized intersections states that one stop for a signalized intersection is perceived as 1.1 cycling minutes or 0.29 EUR (Euro), while the actual waiting time is perceived as an additional 2.0 cycling minutes or 0.53 EUR per minute of waiting [
2]. The perception of a one-minute stop at a traffic sign equals 3.1 min of cycling. Excessive waiting times for cyclists may also result in undesired behavior in terms of route choice (avoidance of signalized intersections) [
4,
5,
6] and red light running infringements [
7,
8,
9].
The presence of signalized intersections on the route is also a recurring factor in the route choice analysis because of the inherent delays and the physical effort of stopping and resuming the trip. This illustrates the need to incorporate intersections and delays into existing indicators for the quality level for cyclists such as bikeability or bicycle level-of-service (BLOS), which often focus on the bicycle quality on links, omitting the quality on intersections. For example, Munro defines the inclusion of an intersection LOS in the LOS for bike riders as one of the avenues for further work [
10]. Concepts like intersection friction or intersection impedance, if refined for bicycle traffic, offer perspectives to fulfil this need. Other LOS methods include intersections, but primarily in terms of road safety [
11,
12,
13].
Due to the importance of intersections and their delays for bicycle behavior, this research evaluates a methodology to derive bicycle delays from smartphone global positioning system (GPS) data of bicycle trips.
Section 2 will go deeper into the policy implications of measuring bicycle delays. Specific studies on the (impact of) intersection delays for cyclists were initially based on cyclists’ perceptions [
14]. The application of smartphone GPS data of bicycle trips on detailed intersection level has been described by Strauss et al. [
15].
Measuring travel times or delays is a common practice for car traffic. Several techniques are applied, which can be categorized into probe vehicle methods, vehicle re-identification methods, and volume and speed estimation methods [
16]. Probe vehicle methods use sensing devices installed in vehicles in the traffic stream to collect data on position and speed, typically by means of GPS systems. Vehicle re-identification methods apply roadside detectors to record unique vehicle characteristics (like license plate, inductive loop detector signature, Bluetooth or Wifi MAC address) at subsequent sensor locations, so that vehicle passages can be matched and travel times can be derived. Point-based volume and speed estimation methods are more approximative methods to extrapolate local point data (e.g., from loop detector or video detection) into corridor level information.
For bicycle traffic, however, the options are less numerous. As cyclists do not have license plates and are less likely to have Bluetooth activated (e.g., no GPS, audio, or handsfree phone systems), it is hard to detect some unique signature per bicycle as required for vehicle re-identification methods. The visual appearance of the cyclist is a possible unique signature for visual measurement (by comparing the times of arrival and departure at the intersection), which is a work-intensive and thus expensive methodology and therefore only applicable for short survey periods. Note that the various methods also introduce semantic differences between ‘delay’ (time lost while passing the intersection) and ‘waiting time’ (time spent waiting at the stop line). In this article, we therefore consistently refer to measuring ‘delays’ as this term is broader and includes not only the waiting time, but also the effect of slowing down when approaching a red light.
In the absence of a better solution, average bicycle delays are usually derived from the characteristics of the traffic light scheme (distribution of the durations of green and red times and the total traffic light cycle) by calculating the statistically expected average waiting time.
Opportunities for automatic measurements of bicycle delays could be found in the application of video processing (object recognition techniques) or of probe vehicle methods, based on GPS tracking, either by means of smartphone applications or by designated GPS loggers. Whereas floating car data (FCD) is commonly used for measuring delays for motorized traffic and transit, this is not the case for pedestrians and bicycle traffic. For motorized traffic, the needs for accurate travel times (e.g., for traffic information and traffic management) have led to extensive literature on the analysis, estimation, and prediction of travel times in different conditions (e.g., motorways vs. arterials), based on (fusion of) different data sources and applying a variety of techniques that have been extensively reviewed in [
17]. Applied methods include Geographic Information Systems or GIS (dynamic segmentation [
18]) and advanced methods like artificial intelligence and neural networks [
19,
20], Markov chains [
21], and Bayesian models [
22]. Recent evolutions also include the estimation of travel time distributions [
23] and distinguishing specific turning delays per intersection movement [
24,
25]. Similar applications for bicycle traffic, however, have not been found, illustrating the very advanced status of travel time measurement for motorized traffic with regard to bicycle travel times, especially on a detailed intersection level.
In this paper, we therefore enquire as to the suitability of GPS tracking data (floating bike data) for the purpose of measuring bike delays. This application is focused on signalized intersections, as these cause the highest delays, and as signal time planning offers effective handholds for reducing waiting times for cyclists, for example, by reducing the total cycle time, by extending the green time for cyclists, or by allowing several green phases for cyclists during one cycle of the traffic light program. This makes reducing bicycles delays a time- and cost-efficient strategy to increase the bicycle level of service, whereas other aspects (safety, separated bicycle infrastructure, road quality, segregating bike flows from car flows, etc.) require infrastructural measures. In the following paragraphs, we first clarify the policy relevance of observed bicycle delays before describing the methodology for calculating bicycle delays from the GPS tracking data (
Section 3.1), followed by a description of the base data for this study (
Section 3.2) and the selected survey locations (
Section 3.3).
Section 4 describes the outcomes of the calculation, which are further discussed in
Section 5, with the conclusions in
Section 6.
2. Policy Implications
As indicated in the introduction, extensive research is available about the bicyclist’s travel behavior, often based on surveys (e.g., travel diaries) or interviews, varying from face-to-face interviews, over telephone interviews to even bike-along interviews [
26]. Additionally, GPS data has proven valuable to give detailed insights in people’s trips over longer periods. Topics cover various aspects of cycling including bicycle ownership, bicycle use, the route choice, (perceived) road safety, etc.
These various aspects have their impact on transport policy, which sees the bicycle as an important instrument to manage the motorized traffic and its negative impacts in terms of environment, health, road safety, economic cost, etc. Bicycle planning aims at increasing the share of bicycle use within the daily transport behavior. Various publications summarize strategies to promote cycling [
3,
27,
28,
29,
30,
31], illustrating that an essential factor is to increase the competitiveness of the bicycle in relation to the car [
32]. This relative competitiveness requires both measures to stimulate bicycle use (e.g., bicycle parking, integration with public transport, etc.) and to decrease the attractiveness of the car (e.g., traffic calming, parking restrictions, pricing, speed enforcement, etc.). For this reason, bicycle strategies need to address motorized traffic as well as bicycle traffic, but there is just as much need to extend them to different policy levels (national, regional, local) and policy domains such as urban land-use planning (e.g., offering facilities at short travel distance), transport planning (e.g., separating bicycles routes from large traffic flows), and infrastructure planning (e.g., providing bicycle lanes on roads with heavy traffic load).
The research in this article was applied to selected intersections in Flanders, the northern region of Belgium. Cycling is common in Flanders: the Flemish Travel Survey [
33] reports a modal share of 11.18% of all trips done with a (non-electric) bicycle as the main travel mode. Like in many cities and regions [
34], bicycle use in Flanders seems to be growing. Important factors are the increased attention to bicycle infrastructure (on a local level, but also on the regional level by the construction of ‘bicycle highways’ for long-distance relations) and bicycle safety, but also the apparition of shared bike systems in larger cities (replacing bike ownership) and electric bicycles (allowing elderly and commuters to bike over longer distances). The growing attention for bicycle traffic in Flanders has also been noticed in recent publications on bicycle safety [
35,
36,
37,
38], utilitarian cycling [
39,
40], electric bicycle potential [
41,
42], bicycle route planning [
43], and health effects of cycling [
44].
In this context, the article addresses the relative competitiveness of the bicycle compared to the car. One of the most relevant aspects in comparison with cars is speed or travel time. As illustrated in the introduction, cyclists are highly sensitive to travel time, both in absolute (based on value of time) and relative terms (perceived travel time based on comfort, safety, etc.). Travel time is closely related to offering short and direct bicycle routes, but the presence of intersections on the route also has a relevant impact on the cyclists’ route choice [
5]. In 2010, the European Parliament’s Committee on Transport and Tourism defined ‘making traffic lights more cycle-friendly’ as one of the key areas for future intervention [
45]. The issue of long bicycle delays at intersections has also been addressed by the Flemish bicyclists representation organization Fietsberaad [
46] and the European Cyclists’ Federation [
47]. The relative importance of intersection delays will even increase when the bicycle speed goes up because of better infrastructure or faster (electric) bicycles.
Although signalized intersections mostly have a negative impact because of the related stops and delays, they can have a positive aspect (e.g., traffic signals assisting cyclists to cross very heavy traffic flows or to pass safely through complex intersections). In this sense, cyclists avoiding signalized intersection can form a problem in terms of traffic safety.
Reducing delays on bicycle routes is thus a known strategy to improve bicycle comfort but is mainly applied by creating a comfortable and safe ride on road segments between intersections, often by means of infrastructural improvements. The issue of bicycle delays at intersections is somewhat acknowledged by formulating practical guidelines, for example in the Netherlands, where several municipalities define critical values for the evaluation of waiting times for bicycle traffic at signalized intersections [
48]:
In general, a maximal cycle time for traffic signal programs of 90 s is advised in built-up areas. The maximal cycle time should not exceed 120 s.
In the city of Arnhem, for a ‘bicycle-friendly’ intersection, the average waiting time should be less than 15 s. An average waiting time below 20 s is moderate, and if the average waiting time exceeds 20 s, the signalized intersection is considered ‘not bicycle-friendly’.
Other cities only limit the maximal waiting time, mostly in order to avoid red light infringements. The city of Maastricht strives to a maximal waiting time for cyclists of 60 s. In Tilburg, the maximum value varies between 35 s and 80 s, depending on the desired quality level.
The above guidelines have also been adopted by the European Cyclists’ Federation [
47]. The application of the above standards, however, requires observed data on waiting times for cyclists in order to have any practical impact.
Therefore, observed data on delays are crucial information, enabling the consideration of delays in various stages of bicycle planning, both for detecting issues in the existing situation (waiting times exceeding the criteria), for defining priorities between locations (ranking intersections according to the average or total delays), for designing adequate measures to reduce the delays, and finally for evaluating the impact after realization. Observed data would also allow a better inclusion and validation of delays in traffic models and simulations, so that bicycle delays can be taken into consideration in the design and optimization of future measures.
Although the proposed method for measuring bicycle delays is equally applicable for non-signalized intersections, the selected cases (
Section 3.3) focus on signalized intersections for several reasons. Traffic signals are usually installed primarily on intersections with an important traffic function and are therefore programmed for maximal traffic flow, causing suboptimal functioning for bike traffic. For this reason, they often also cause the highest bicycle delays. Equally important, however, is that signalized intersections also offer handholds to reduce bicycle delays by means of the signaling scheme (e.g., by reducing the signaling cycle time, including two green phases for bikes per signaling cycle, extending the green time for cyclists according to demand or weather conditions, etc). Right-turn-on-red for cyclists is another suggested measure [
45] to avoid unnecessary delays, especially after successful implementations in the Netherlands and more recently in a large city like Paris [
49]. Solutions can also be sought on a higher corridor level by means of coordination (green waves) between subsequent intersections.
Conflicting interests between the capacity for road traffic and road safety and delays for slow modes often prevent such solutions. For example, a longer cycle time increases the efficiency of the signaling scheme for motorized traffic, but is detrimental for the delays of slow modes. Similarly increasing green times for one direction/turning or mode directly affects the available green time for other directions/turnings or modes.
A strength of measures on the level of the signaling scheme is that they deal with software modifications and are cost- and time-consuming in comparison to infrastructural (hardware) measures that are needed to expand the bicycle network or improve bicycle facilities. Investing in biking infrastructure is a slow and expensive strategy and can be inefficient if other obstacles are not solved. Therefore, it is important to also apply smaller measures that can have a significant immediate impact on biking quality and comfort. In light of relative competitiveness, the aforementioned signal optimizations can provide the carrot-and-stick measures needed to address bicycle and car traffic at the same time. Moreover, software modifications are reversible if the results do not meet expectations and allow for further optimization in the course of time.
Automatic measurements of waiting times for cyclists would allow an evaluation of delays over longer periods and for larger populations, giving insight in the delays at various (types of) intersections, for the distinct turning movement, for different periods of the day, or for varying volumes of traffic.
The resulting information on travel times and delays for bicycles would be relevant information toward cyclists when planning their trips in order to avoid stops and delays on their route. Better route planning can help promote the preferred bicycle routes, for example, by disclosing the observed data via bicycle route navigation. Delays can even form an instrument to manage bicycle flows, similarly to car traffic, by making specific preferred routes more attractive and other (e.g., unsafe) routes less attractive.
The information on delays would allow cities to monitor waiting times on a regular base and to react when thresholds are frequently exceeded. The observed delays would even be an meaningful indicator toward the “datafication of cycling” [
50], for example, to include bikeability in an indicator set for sustainable urban mobility [
51]. Speed and travel time are often used as a measure for the quality of the bicycle network. Especially when measured delays can be combined with data on the volume of cyclists, intersections with high delays for high bicycle flows can be prioritized for reconsideration. Insight in the variation of delays and flows at different periods of the day can justify a differentiated prioritization between modes during the day.
3. Methods
3.1. Methodology for Estimation of Delays for Bicycles from Floating Bike Data
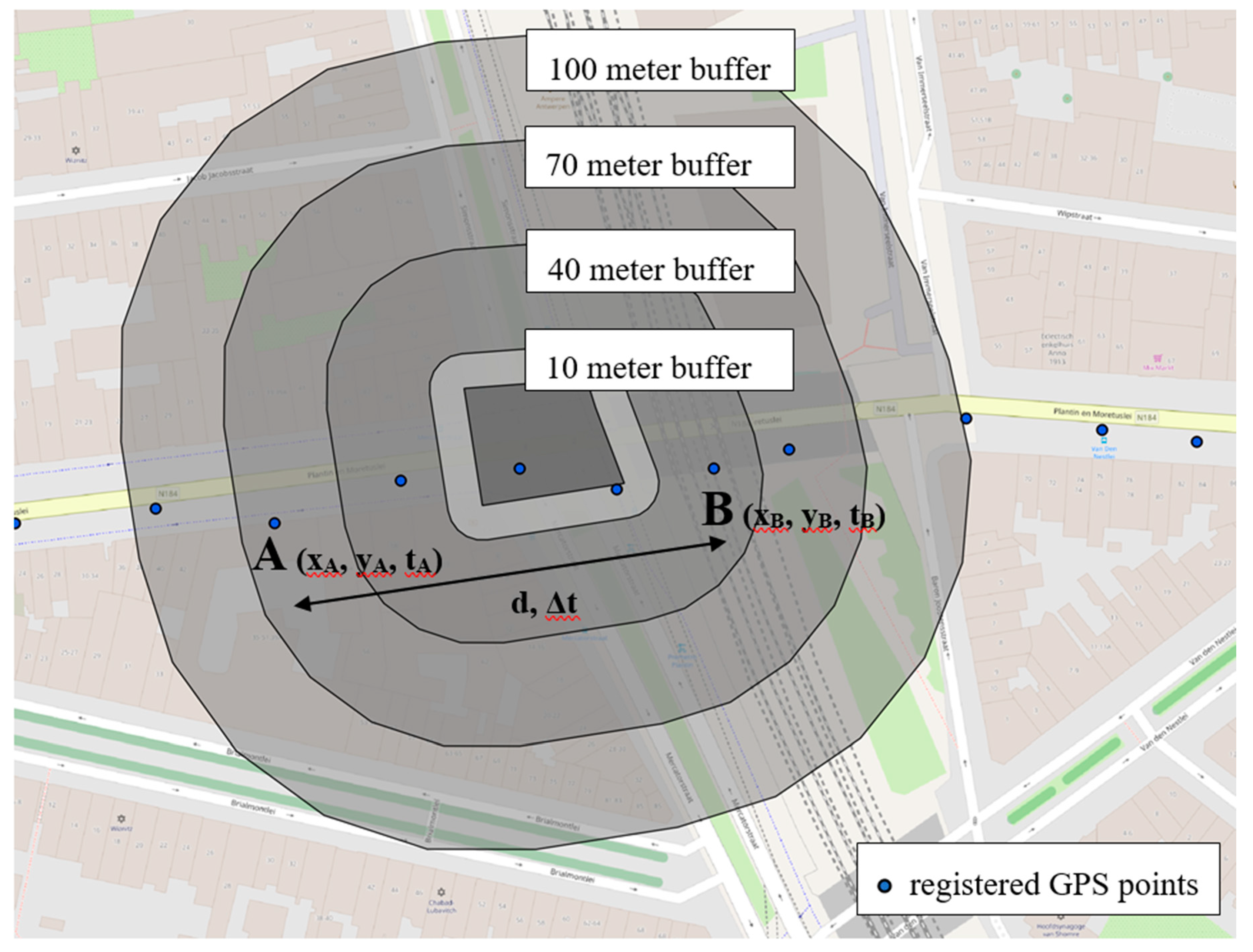
Bike delay is defined as the additional travel time needed to cross the signalized intersection, compared to the ideal travel time. In order to derive bike delays from observed bike behavior, the passage times between two well-chosen points before and after the intersection need to be compared to derive the travel time between both. The measured travel time in this case is compared to the ideal travel time to determine the delay suffered during the trip. Due to the importance of the selection of the points used in the calculation, we will evaluate the strategy of selecting these points.
The availability of GPS data opens new opportunities to automatically measure this delay from observed bike behavior. In the case of GPS tracking, the position of the cyclist is stored with a time stamp at a fixed frequency throughout the complete trip. This results in a number of GPS points along the route, which together describe the complete trip from its origin to the destination. The data, however, has its limits. A surveyor cannot freely choose the exact sample locations before and after the intersection (e.g., exact time of passing the stop line) due to the sampled nature of the data. An automated method demands a careful selection and processing of the points and measurements in order to derive an indicator for bike delay.
To analyze the delays on a specific junction, first, a selection is made of all the trips passing on the junction. For each of the trips, the GPS-position
A (and time stamp) before the junction is compared to the GPS-position
B (and time stamp) after the junction, as illustrated in
Figure 1. From this data, the distance
d and the time difference Δ
t between points
A and
B are known. This time difference consists of Δ
t =
tc +
tw, with:
tc: the ideal cycling time to pass the junction,
tw: the additional delay because of a red traffic sign.
The first part is the ‘ideal’ cycling time, which would be necessary to cycle from A to B without delay by the traffic sign (i.e., as if arriving at a green light). The second part is the additional time lost because of a red traffic sign. In order to calculate the time delay tw = Δt − tc, we need to estimate the cycling time tc. As the distance d is known, this is calculated as tc = d/vc, resulting in tw = Δt − d/vc, where vc is the average speed of the cyclist while crossing the intersection.
In this exploration, we hereto assumed an average cycling speed
vc of 18 km/h (5 m/s). This is an accepted value in Flemish practice (e.g., for calculating entering and clearing times for cyclists in traffic light programs) [
52]. The value was confirmed by the measured speeds on the considered intersections (see
Section 4.1). Note, however, that in order to measure free-flow speed, the values are measured on the approach toward the intersections and may differ from the speed on the intersections. For this reason, the average speed was applied rather than specifying the bicycle speed per user, per location, and/or per direction, which is a way for further refining in future applications. By applying one common average speed for all users, the time lost because one cycles slower than the supposed 18 km/h was also considered as part of the measured delay. Alternatively, a user cycling faster than 18 km/h may compensate a part of his delay. In order to reduce the impact of these variations in average speed on the calculated delay
tw, it is desirable to keep the distance d as short as possible, meaning that the GPS locations
A and
B should be chosen close to the intersection.
On the other hand, choosing A and B too close to the intersection may result in an underestimation of the delay, as only the actual ‘stop time’ is included. Cyclists approaching the intersection at a red light, tend to stop pedaling and slow-down in order to avoid a full stop at the intersection. This deceleration also causes a delay, which is only measured if A and B are chosen at a sufficient distance away from the intersection. Measuring over a longer distance d ensures that the resulting delay not only includes the actual waiting for the intersection, but also the deceleration when nearing the red signs and the time lost starting and accelerating again at the green light. However, applying longer stretches also increases the risk of external disturbances being included in the analysis: nearby junctions, pedestrian crossings, parking vehicles, etc. may affect the measured delay.
In our calculations, we will therefore evaluate the stability of the results when choosing the points A and B, in order to find a balance between a shorter (reducing the impact of interpolation) and a further choice of the points (including all relevant aspects of the delay caused by an intersection). Hereto, points A were selected using several buffers at different distances from the intersection area (stop lines). The results for the different buffers will be compared in order to evaluate the stability of the results.
3.2. Base Data
The data for this analysis was collected in the frame of the Bike Count Week (Fietstelweek), a yearly initiative, organized in the whole of Flanders (the northern part of Belgium) by the bicycle representation groups Fietsberaad and Fietsersbond, in cooperation with the Flemish government and the Union of Flemish communities. During this week, the cyclist is put into special attention, with the specific target of collecting more data about the bicycle behavior in Flanders. During the Bike Count Weeks in 2015 and 2016, the population was encouraged to register their bicycle tracks by means of a dedicated “Bike Count app” on their personal smartphone.
The smartphone app registers GPS tracks of bicycle trips. With a set frequency of five seconds, the location coordinates, time stamp, actual speed, and heading of the participant are stored and transmitted to a central database. As (crowd-sourced) smartphone GPS data are typically unstable data, some aspects of the design of the campaign were decided in function of an increased data quality. For example, the communication positioned the app strongly as part of the Bike Count Week in order to attract bicycle users and to focus their registrations on bicycle trips. The tracking app aimed at the maximal use of quality GPS data, despite a higher battery consumption. For this reason, the app relied on manual trip registration by the participants, allowing the user to not register a trip in the case of a low battery.
All of the GPS locations during a single trip reveals detailed trip information including the time and duration of the trip, the origin and destination and the route in between, the local and average speed during the trip, location and duration of delays during the trip, etc. Other trip information needs to be derived or estimated in the further processing of the raw GPS data. Therefore, a lot of research has contributed to methods to assess the transportation mode(s) and the trip purpose [
53,
54,
55,
56,
57,
58,
59,
60], based on the speed and accelerometer data during the trip, additional GIS-data (e.g., about public transportation networks and rail networks), land use maps, etc. [
61,
62]. These methodologies yield good results for determining trip ends and travel modes, but the quality of the estimation of trip purposes remains poor [
63,
64].
The use of smartphone tracking opens new opportunities for research on individual travel behavior, as it results in multimodal data (as opposed to GPS-data collected from vehicles) for longer and continuous periods with a high level of accuracy (both in terms of position and time), in contrast to classic travel surveys. This type of data adds new perspectives to the classic research on travel behavior (e.g., understanding trip chaining), but also allows travel modes like walking and cycling to be explored, for which highly detailed data have not been available before. For cycling, this has resulted in a number of publications about the cyclist’s route choice [
4,
5,
6] (e.g., by comparing the observed route choice to the expected choices). Only one publication was found in the field of measuring bicycle delays [
15], proposing a methodology for determining intersection delays, but without expanding on the validity of the values.
The Bike Count Week 2016 campaign resulted in a dataset of about 29,000 registered trips by 2700 unique users, totaling 152,000 km of bicycle trips. In the data preprocessing, the quality of the collected data was a specific point of attention. Quddus et al. [
65] reported GPS positioning accuracy (two dimensional) of 15–20 m, although errors may increase in street canyons or streets with dense tree cover. The preprocessing, therefore, applies data enhancement techniques in order to deal with typical issues in working with tracking data [
66,
67]. This also includes a number of quality checks in order to filter out erroneous registrations such as:
- -
trips with a non-bicycle mode: trips that were presumably car or pedestrian trips, incorrectly registered as bicycle trips by the user.
- -
trips with erroneous start/stop detection, which, for example, causes the departure and return trips to be registered as one long trip, resulting in an extremely long calculated delay.
- -
trips where a very high dwelling time on the intersection seems to not be related to the intersection, for example, people with an origin or destination very near to the intersection (e.g., one intersection has a supermarket on one corner) or people waiting to meet someone.
For the first case, a filter was applied in order to remove outliers in terms of approach speed to the intersection (see
Section 4.1), as participants were explicitly requested to registered (only) bicycle trips. In case of multimodal datasets (e.g., by automatic GPS tracking), more robust trip segmentation and mode detection algorithms are necessary. For all selected survey locations and directions (see
Section 3.3), the average bicycle speed was calculated at 17.8 km/h with a standard deviation of 6.1 km/h. The speed thresholds were determined at two standard deviations from the mean (6 km/h and 30 km/h), corresponding with filtering the 5% extreme values. The impact of this filter will be discussed in
Section 3.
For the second and third case, a threshold value was determined in relation to the cycle time of the signaling scheme. In normal conditions, a maximal delay for a bicyclist would occur if a bicyclist arrives at the exact end of the green phase and needs to wait for the next traffic signal cycle to get a green light. In extreme circumstances (very busy bicycle flow, passage blocked by e.g., queuing road traffic, etc.), one could imagine a bicyclist having to wait for an additional traffic signal cycle to cross the intersection, but longer delays are unlikely. Therefore, a threshold of two times the signal cycle time has been applied.
3.3. Selected Survey Locations
The analysis was executed for five intersections, selected according to the number of registered trips and the high delays for cyclists (based on complaints by cyclists at the cyclist representation organization Fietsberaad [
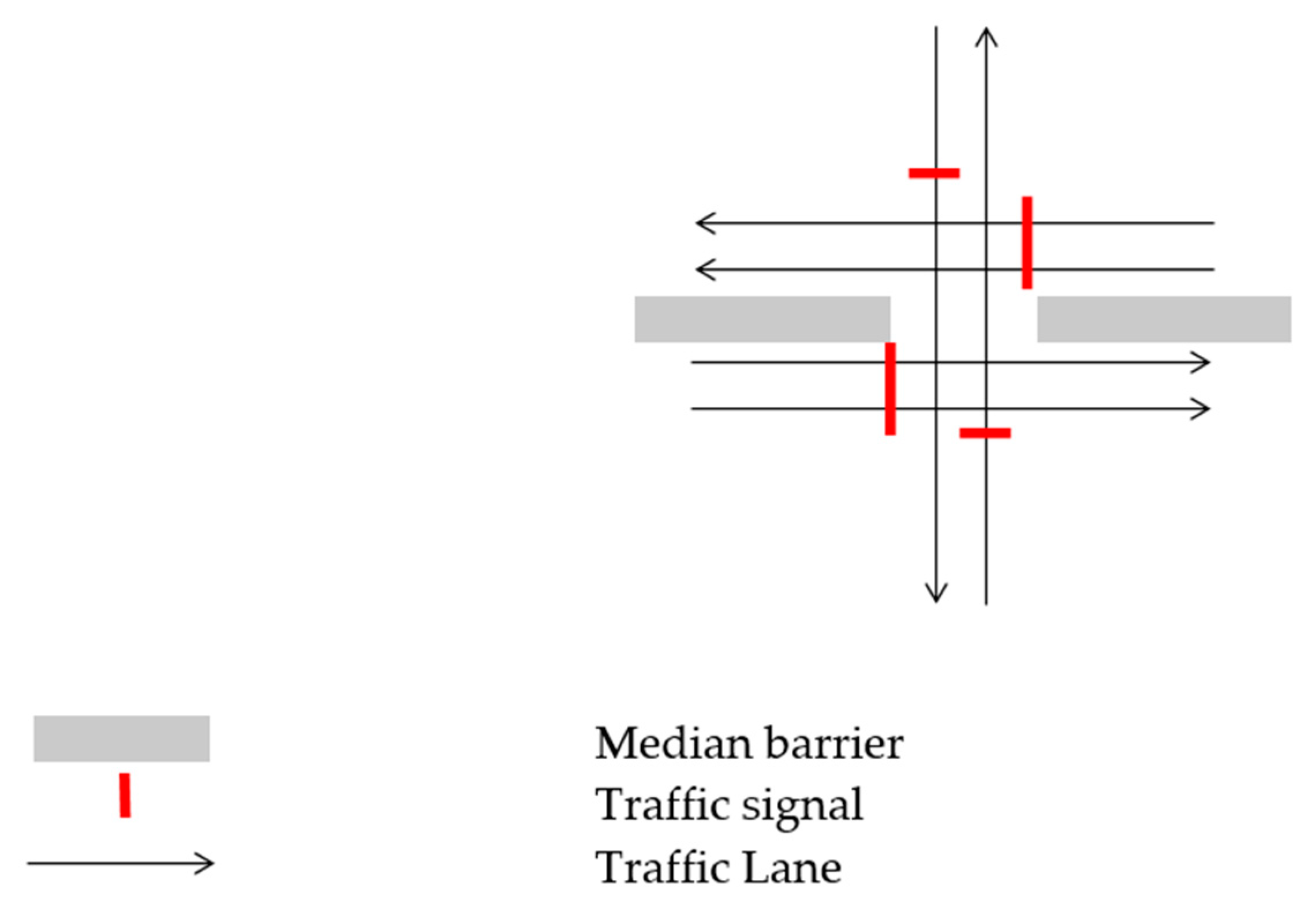
46]). All intersections were situated at the border of the city center, where a minor road with an important bicycle route (typically to and from the city center) crosses a main road for car traffic (typically an urban ring road or arterial). The intersections had a similar lay-out, as visualized in
Figure 2, where the main road had one or two lanes in each direction with a median barrier, while the minor road had one lane in each direction. On all considered intersections and arms, cyclists obtained a green light simultaneously with the parallel motorized traffic and green times were defined in function of the motorized traffic flows.
- -
Intersection 1 is located in the city of Ghent (260,000 inhabitants). It is a 5-armed intersection, where the east–west-direction is the urban ring road R40 (the main direction for car traffic), a road with two lanes in each direction and a middle barrier. The northern arm leads toward the city center and is accessible for car traffic only in one direction, toward the city center, although cyclists are allowed in both directions. The two southern arms lead to the southern suburbs.
- -
Intersection 2 is located in the city of Leuven (101,000 inhabitants), and has four arms, although immediately south of the junction, a fifth arm branches off, which is not signalized. The east–west direction is the urban ring road R23 with two lanes in each direction with a median barrier. The northern arm enters the city center, while the southern arm connects to the southern neighborhoods.
- -
Intersection 3 is located in the city of Antwerp (526,000 inhabitants), and has four arms with a more balanced function for car traffic. The east–west direction has a median barrier. For bicycles, the east–west-relation (to and from the city center) is dominant.
- -
Intersection 4 is located in the city of Antwerp (Berchem). The east–west direction is the urban ring road R10 with two lanes in each direction and a middle barrier. The north–south-direction is a major bicycle route between the southern suburbs and the city center.
- -
Intersection 5 is located in Antwerp on the crossing of an east–west-oriented corridor for car traffic with two lanes in each direction and a middle barrier, and a north–south oriented bicycle route to the city center.
The analysis focused on the main directions for bicycle traffic, which is the north–south-direction for most intersections, except for Intersection 3. For Intersection 3, both the north–south and east–west oriented trips were included in the analysis. The reason for this focus is two-fold: first, these directions have the highest number of cyclists (and the highest number of registered trips in the data set), and second, these directions are expected to suffer the highest delays, as they are opposed to the dominant streams of car traffic.
4. Results
We focused this analysis of the results on the stability of the calculation method, in two regards. In the first part of this section, we tested the stability for different strategies of selecting the measurement points for the calculation. Next, we evaluated the impact of the speed filters that were applied to remove the outliers from the dataset.
4.1. Stability in Terms of Selection Strategy
As described in
Section 3.2, the delay at intersection was estimated by comparing the GPS-information between two measurement points before and after the intersection. Depending on the sampling frequency of the GPS tracking, several measurement points may be available as a base for calculating the intersection delay. A different selection of the measurement points before or after the intersection may result in diverging estimations of the delay.
Specifically, the choice of the first measurement point may affect the outcome of the delay measurement. Selecting the first measurement point close to the intersection reduces the impact of the interpolation, but increases the risk of missing a part of the delay (during the approach of the intersection). For this reason, GPS points at less than 10 m before the stop line of the intersection were not used for the calculation: taking into account the accuracy of the GPS position, this point may be registered during or even after the wait for a red light. Selecting the first measurement point further away from the intersection has the opposite effects, increasing the impact of interpolation and inducing a risk of including other disturbances that are not related to the intersection.
To evaluate this effect, the average bicycle delay was calculated for different positions of the first measurement point:
- -
A first measurement point selected in a buffer at 10 to 40 m before the intersection (corresponding with the buffer size as applied in [
15]);
- -
A first measurement point selected in a buffer at 40 to 70 m before the intersection; and
- -
A first measurement point selected in a buffer at 70 to 100 m before the intersection.
Given the sample rate of five seconds and the estimated biking speed of 5 m/s, a GPS location was stored about every 25 m, implying that most trips had a GPS location for each of the three buffers. If several GPS locations were registered within one buffer during a trip, the location closest to the intersection was selected.
The number of trip registrations with GPS locations in each buffer is summarized in
Table 1 for the considered intersections. For reasons of comparability, only the trips with a GPS location in each of the three buffers were considered in the further calculations, as indicated in the last column of the table. This ensures that the calculated bicycle delays are based on an identical set of bicycle trips, and solely differ in terms of the selection of the first measurement point. Eventually, about 20% of the raw trip registrations were eliminated from the dataset, partially during the pre-processing (unlikely approaching speeds or delays) and partially during the delay calculations (for not having a GPS point in each of the buffers).
To position the resulting sample sizes, we referred to the common practice of conventional travel time measurements for car traffic [
68], where a minimal number of 5 to 9 vehicle runs would be advised on arterial streets (depending on the traffic signal density) for a 90% confidence level with 10% error. However, it is noted that practical limitations typically limit the maximum number of vehicle runs to three to six runs per route. A minimum of six to 12 measurements would be prescribed for a 95% confidence level with 10% error, and a minimum of 15 to 37 measurements would be prescribed for a 95% confidence level with 5% error. This comparison illustrates that Intersections 1 and 2 had a similar sample size to a typical travel time measurement for motorized traffic, and Intersections 3 to 5 even met higher accuracy ranges.
Given the above number, an error margin of 10% is to be expected for the calculated delays. We therefore applied a 10% margin for the evaluation of the stability of the results.
The results of the delay calculations are presented in
Table 2. For the considered directions on each intersection, the table shows the average estimated delay for the different choices of the GPS locations (between brackets the standard deviation is added). The last column shows the relative difference between the highest and lowest value of the estimated delay. This number is a measure for the stability of the results in the case of different selection of GPS locations.
The results illustrate that the results were stable, regardless of the applied selection of the GPS points. For nine out of 13 directions (70%), the differences between the maximal and minimal estimated values were within the desired range of 10% margin. For five out of 13 (38%) the variation was within 5%. The uncertainty is rather situated in the high standard deviation, which is about as high as the delay itself. Improving the outcomes of the delay calculation would therefore primarily require a larger dataset (higher number of registered trips), rather than a better selection of the GPS locations.
For four out of 13 directions (38%) the differences were above 10%. In three of these, the variation was between 10 and 20%; in one case the variation was almost 50%. All of these extremes occurred typically in cases where the GPS points were chosen close to the intersection (in the 10 to 40 m range), leading to a lower estimated delay. By selecting a GPS point close to the intersection, the calculated delay was restricted to the actual ‘waiting time’ on the intersection, omitting a part of the total ‘delay’ during the approach of the intersection. This illustrates how cyclists typically slow down when approaching a red light in order to avoid a full stop.
The southern arm of Intersection 4 showed a remarkable opposite behavior, where the estimated delay decreased when GPS locations were chosen further away from the intersection. This is due to the fact that the road descends toward the intersection. Therefore, the average speed toward the intersection was higher than the assumed 18 km/h, which causes an underestimation of the total delay as the delay is partially compensated for by the higher speed. This compensation works stronger as the calculation is made over a longer distance, thus as the GPS location is chosen further away from the intersection.
The higher approaching speed on this intersection arm was confirmed in the measured approaching speeds, derived from the floating bike data, as shown in
Table 3. The southern arm of Intersection 4 had an average approaching speed of over 24 km/h, whereas the other intersection arms complied very well with the assumed average bicycle speed of 18 km/h.
This case illustrates that the assumption of an average bicycle speed should be applied with care as it may affect the quality of the results for locations with varying conditions. In future applications, it may therefore be advisable to specify the average speed per intersection arm in order to account for the local situation. On the other hand, the speed when crossing the intersection may differ from the speed on the approach (differences in road surface or gradient, conflicts with motorized traffic, etc.).
4.2. Stability Related to the Speed Filter
As a second aspect of stability of the method, we evaluated the impact of the speed filters, as described in
Section 3.2, to remove outliers from the dataset (i.e., trips that were erroneously registered by the user as bicycle trips). The total impact is that 12 trips were filtered, out of a total of 166 trips. These trips were situated mainly on Intersection 1 (one trip in each direction), Intersection 3 (two trips from north to southeast, three trips from south to north), and Intersection 5 (two trips in each direction).
Table 4 shows the results for Intersections 1, 3, and 5 for the 40–70 m buffer, if the speed filters are not taken into account. The absolute and relative differences with the corresponding results in
Table 3 illustrate the impact of the speed filter on the calculated delays. For Intersections 3 and 5, the impact for the affected directions was less than 10%. For Intersection 1, the delay in the northern direction increased 17%, and thus does not comply with the 10% margin of stability, which can be related to the low number of trip registrations on this location. At Intersections 3 and 5, the larger number of observations mitigated the impact of outliers.
This provides a more nuanced insight to the applied speed filters. To obtain stable results for the bicycle delay, either a sufficient number of trip registrations is needed (order of minimum 10 to 20 registrations if we draw a parallel with travel time measurements for car traffic [
68]) or the data quality needs special attention to ensure stable results.
5. Discussion
The proposed methodology allows the calculation of delays for cyclists based on the GPS tracking data of bicycle trips. This way, the measured delays are derived directly from the observed bicycle behavior.
A valid question is whether the measured delays effectively differ from the currently used method [
48], which is based on a statistical approach, where characteristics of the traffic light program are used to calculate the expected value of the waiting time:
- -
A cyclist from direction i has a probability P(Gi) of arriving at the intersection during a green light phase, which can be expressed as the ratio of green time for direction I to the total cycle time of the traffic light program. In this case, the cyclist has a delay of 0 s.
- -
A cyclist from direction i has a probability (1 − P(Gi)) of arriving at the intersection during a red light phase. In this case, he will suffer a delay that can vary between 0 s and the maximum red time Tred,i. A cyclist arriving at a red light will experience an average waiting time of Tred,i/2.
- -
The average waiting time for all cyclists arriving at the intersection, either during a green or red light, can be expressed as E(Wi) = (1 − P(Gi)) ∗ Tred,i/2.
Note that the latter formula corresponds with Akcelik’s classic formula for delays at traffic signals [
69] in the case of low saturation rates (x = 0) and absence of overflow delays, where both are logical assumptions for the bicycle traffic on the selected intersections.
This means that information on the total cycle time and green/red time for cyclists from direction i is sufficient to estimate the expected bicycle delay at a signalized intersection. It should be noted, however, that all considered intersections have a traffic-actuated signal program where green times and cycle times vary, according to the amount of traffic per direction. Therefore, we calculated the expected values of the waiting time for two situations: with a low traffic load or with a high traffic load. During heavy traffic load, the main motorized traffic direction profits relatively more green time extension than the conflicting directions, leading to a higher share of green time for the main motorized traffic flows during peak loads. As most of the considered bicycle flows are opposed to the main direction, they suffer a lower share of green time during periods with high traffic load, and thus lower probability P(Gi) of passing the intersection without delay, longer maximum red time Tred,i, and longer expected waiting time E(Wi).
The summary in
Table 5 therefore contains values for the expected waiting time in case of a low and high traffic load and compares these to the measured delays as derived from the GPS data. Note that the trip registrations from the Bike Count Week contained data for different times of day, and thus represent a mixture of the situations with high and low traffic loads.
When we compare the theoretical and measured values for the chosen metrics, we noticed that on half of the considered intersections and directions (seven out of 12), the measured results were within the range of the minimal and maximal expected values or within a 10% margin. Specifically, Intersections 3 and 4 (east–west directions) showed large differences. For all intersections and directions, the measured delays tended to be higher than the theoretically expected values.
A possible explanation for these differences is that the theoretic calculation assumes evenly distributed arrivals at the intersection. This assumption may not always be met in reality, where cyclists’ arrival can be more clustered, for example, because of a proceeding traffic sign. Although the available data does not allow a verification to what extent this actually causes the aberrations, the results illustrate that the correspondence between theoretical and measured values is not self-evident. In addition, the size of the margins—up to over 20 s—is such that they can drastically impact the evaluation of bicycle quality, either when comparing the delays to quality thresholds or when benchmarking intersections to each other.
Other reasons relate to aspects of bicycle behavior. For example, the theoretical value does not account for time loss for restarting after a stop (getting on the bike and accelerating) or red running (passing through the first seconds of red light; restarting before the start of the green light).
These conclusions suggest that theoretical values should be applied with care, and that there is sense in the application of measured, GPS-based bicycle delays. It deserves further research to determine the conditions that affect the reliability of the theoretical values, in order to estimate in which situations the theoretical values are a sufficient approximation and in which situations it is advised to reach out to more detailed measurements.
6. Conclusions
In this paper, we discussed the problem of bike delays for cyclists on signalized intersections. A novel method was proposed to derive bike delays on intersections from observed data by processing floating bike data by interpreting the time stamps before and after the intersection. By comparing the measured travel time for crossing the intersection to the ideal travel time, the total delay of a cyclist can be assessed. This was executed by means of selection buffers to select GPS points at a given distance from the intersection. Selected points within the buffers were used to calculate travel time.
Although the sampled floating bike location data are rich data to capture bike behavior, careful processing is needed to avoid artifacts. We have shown the impact of different selection strategies and the stability of results against different strategies. In order to test stability and validate the methodology, we used a real dataset from the Flemish Bike Counting Week. This dataset includes floating bike data from 2700 users over Flanders.
To test the method and assess the stability of the method, we selected five different intersections in our dataset. The method was applied and the calculation of bicycle delays was repeated for selection buffers at different distances from the intersections. The measured bike delay remained stable over the intersections. For 70% of the evaluated directions, the variation between the minimal and maximal result was less than 10%, for 38% less than 5%. The outliers illustrated that selecting a point too close to the intersection (10–40 m) results in an underestimation of the delays as part of the delay is missed in the measurement (e.g., when cyclists are slowing down during the approach of a red light). However, the results prove stable if GPS locations further before the intersection are used (40–70 m or 70–100 m). As selecting a point too far before the intersection risks inclusion of other causes of delay that are not related to the signalized intersection (like parking vehicles, pedestrians, or nearby intersections), the application of GPS points between 40 and 70 m before the intersection seems optimal. In case of datasets with a high sampling frequency, the optimal GPS point can be selected for calculation. When using datasets with a lower frequency, however, GPS points are more sparse and it is not evident to have a GPS point available at this optimal distance. Therefore, it is relevant to know that results are stable for GPS points at further distances.
In the proposed methodology, a filter was included to remove outliers in terms of speed from the dataset (e.g., representing non-bicycle trips that were erroneously registered as bicycle trips by the user). This filter is especially relevant in the case of small datasets, when single outliers can largely affect the outcomes of the calculation. In the case of larger datasets, this effect of the filter on the calculated delays is within the 10% margin, as the effect of outliers is mitigated by the number of registered trips. A minimum order of 10 to 20 trips seems advisable.
The results of the proposed methodology were compared to the commonly used practice of deriving the statistically expected delay from the characteristics of the traffic light program (cycle time, green/red time per direction). For over half of the considered directions, the measured values corresponded well to the expected values (within the range between minimal and maximal expected value or with a margin of maximum 10%). The other half, however, showed differences up to more than 20 s between the measured and expected values, where the observed delay was typically higher than the theoretically expected value. This is a relevant difference, as it may drastically affect the evaluation of the bicycle comfort of an intersection.
The reason for this aberration may be that the theoretical values assume an evenly distributed arrival of cyclists on the intersection, which may not always be fulfilled in reality, for example, when cyclists arrive in platoons because of an upstream intersection. Other explanations are that the theoretic values do not take into account the aspects of bicycle behavior like the additional lost time for getting on the bike and accelerating after a full stop, or the red light running during the first and last seconds of red light).
This illustrates that caution is needed at least when applying the expected delays for the evaluation of bike comfort. Further research is required to determine the conditions that affect the reliability of the theoretical values in order to estimate in which situations the theoretical values are a sufficient approximation and in which situations it is advised to reach out to more detailed (observed) measurements.
The knowledge of bicycle delays is relevant because the presence of signalized intersections on the route is a recurring factor in studies on bicycle route choice, showing cyclists to prefer routes with good infrastructure, low traffic volumes, and lower density of (signalized) intersections over the shortest route. Reducing delays on bicycle routes is thus a strategy to improve bicycle comfort in general as well as on targeted bicycle routes.
On the other hand, traffic signals also increase bicycle safety, for example, on complex intersections or when crossing flows with very high traffic volumes. Avoiding (delays caused by) signalized intersections can therefore have a negative safety effect.
The proposed method is equally applicable for non-signalized intersections, but has been illustrated here for a selection of signalized intersections for two reasons. First, traffic signals are usually installed primarily on intersections with an important traffic function and therefore programmed for a maximal traffic flow, causing suboptimal functioning for bike traffic. Second, signalized intersections offer handholds to reduce delays by means of the signaling scheme (reducing the signaling cycle time including two green phases per signaling cycle, extending green time for cyclists according to demand or weather conditions, etc.), without the (cost- and time-consuming) infrastructural measures needed on other locations.
The further application of GPS-based bicycle delays offer several opportunities, for example, for the design of bicycle route networks and for cyclist information and navigation, but also for intersection optimization, where the prioritization between motorized traffic and slow modes (cyclists, pedestrians) is often a crucial question. Measured delays based on GPS tracking data allow for the detection of problem intersections (comparing measured delays to comfort thresholds) or the relative ranking of intersections (comparing measured delays for several intersections). We note that some comfort thresholds have been defined, but remain irrelevant if not confronted with observed data. Measurements also support the design of proposed optimizations and allow for an evaluation after realization. Solutions can be sought on a local intersection level (optimizing a single intersection) or on a higher corridor level by means of coordination (green waves) between subsequent intersections.
A frequent or even permanent monitoring of bicycle delays can become part of an urban mobility indicator set. Particularly when measured delays can be combined with data on the volume of cyclists, intersections with high delays for high bicycle flows can be prioritized for reconsideration.

 ,
, 


{kind=link}
{kind=link}