Predicting Land Cover Change in the Mamminasata Area, Indonesia, to Evaluate the Spatial Plan

 ,
, 
Abstract
:1. Introduction
2. Research Site and Materials
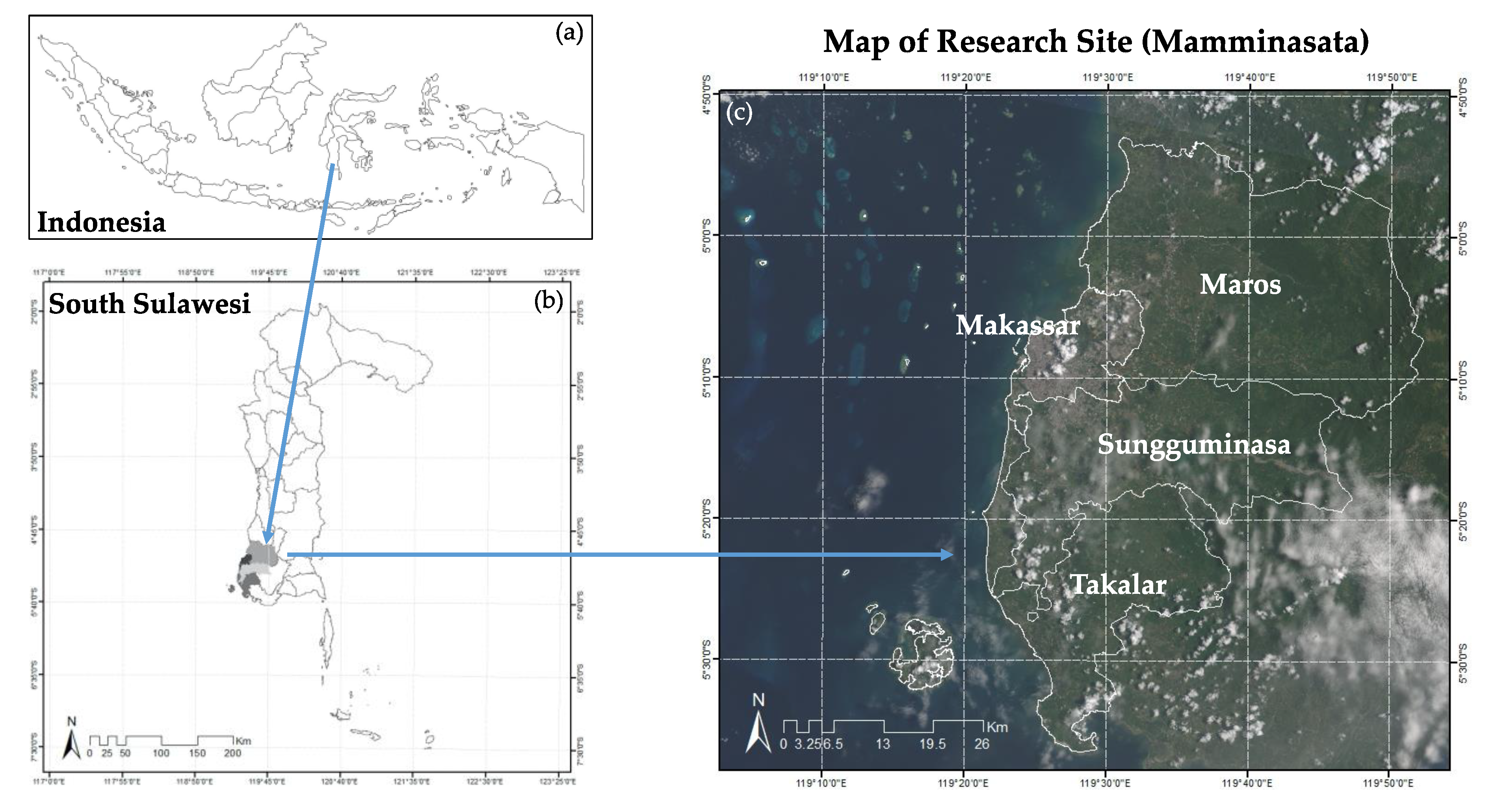
2.1. Research Site
2.2. Materials
2.2.1. Satellite Data
2.2.2. Other Spatial Data
3. Methods
3.1. Land Cover Mapping
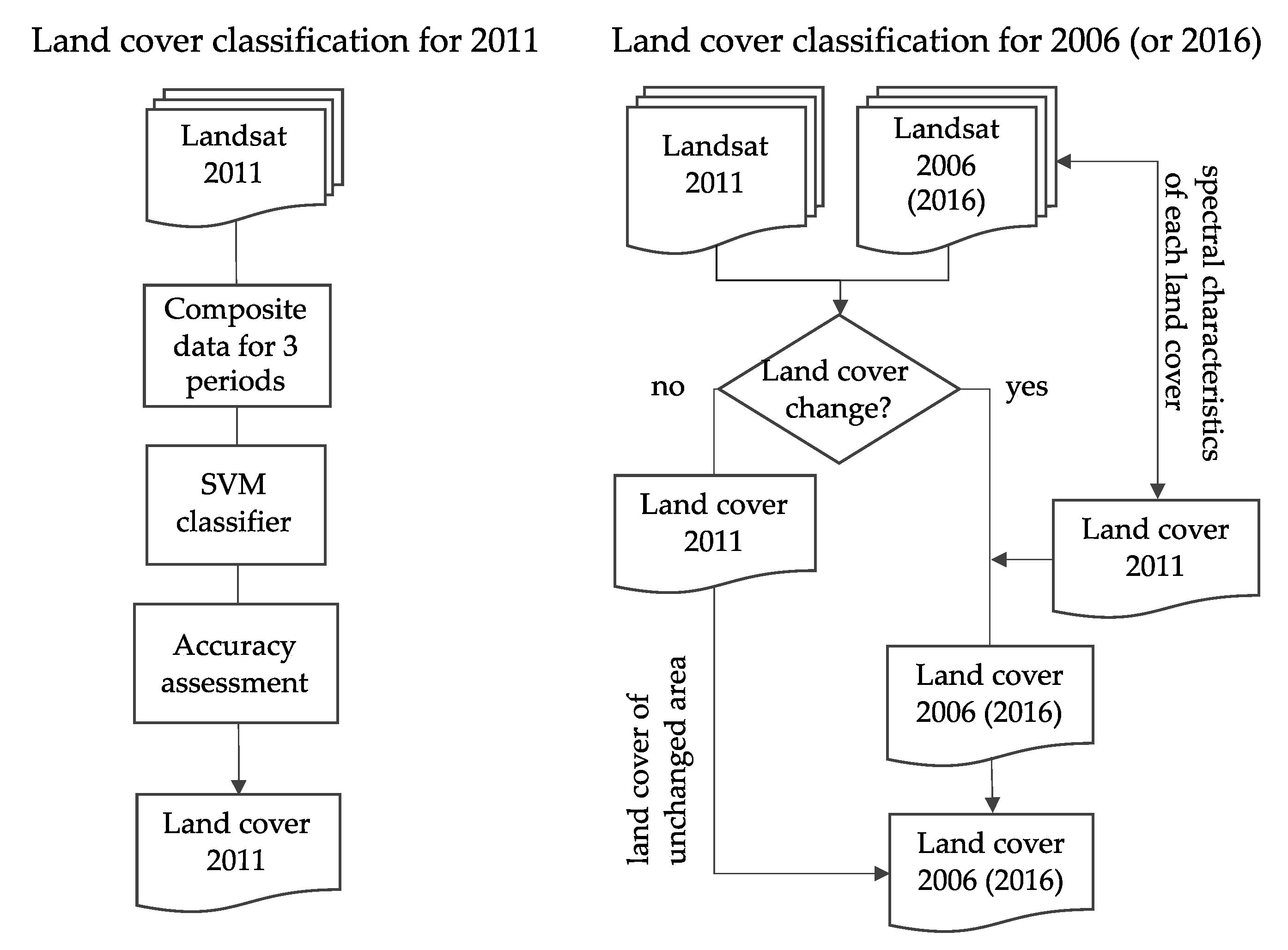
3.1.1. Land Cover in 2011
| Ca | : | number of points where classification is correct, |
| Cg·sum | : | total ground truth points per class, |
| Ci·sum | : | total classification points per class, |
| Cc·sum | : | total number of points where classification is correct, |
| C·sum | : | total number of points, |
| PM | : | sum of the multiplication of ground truth points and classification points with respect to each land cover. |
3.1.2. Land Cover in 2006 and 2016
| : | normalized difference for the image pixel at location (line) and (column), | |
| : | number of valid image pair (maximum is 4 but it is decreased in case of cloud, shadow, and scan gap), | |
| : | difference in digital number between 2011 and 2006 (or 2016) at pixel ( and are index for band and image pair, respectively), | |
| : | average of for all pixels in a scene, | |
| : | standard deviation of for all pixels in a scene. |
| : | normalized difference for the image pixel at location (line) and (column), | |
| : | number of valid image pair (maximum is 4 but it is decreased in case of cloud, shadow, and scan gap), | |
| : | digital number of changed pixel ( and are index for band and image pair, respectively), | |
| : | digital number of sample data as same band and period with for sample data in land cover class , | |
| : | standard deviation of for all samples. |
3.2. Land Cover Change Model
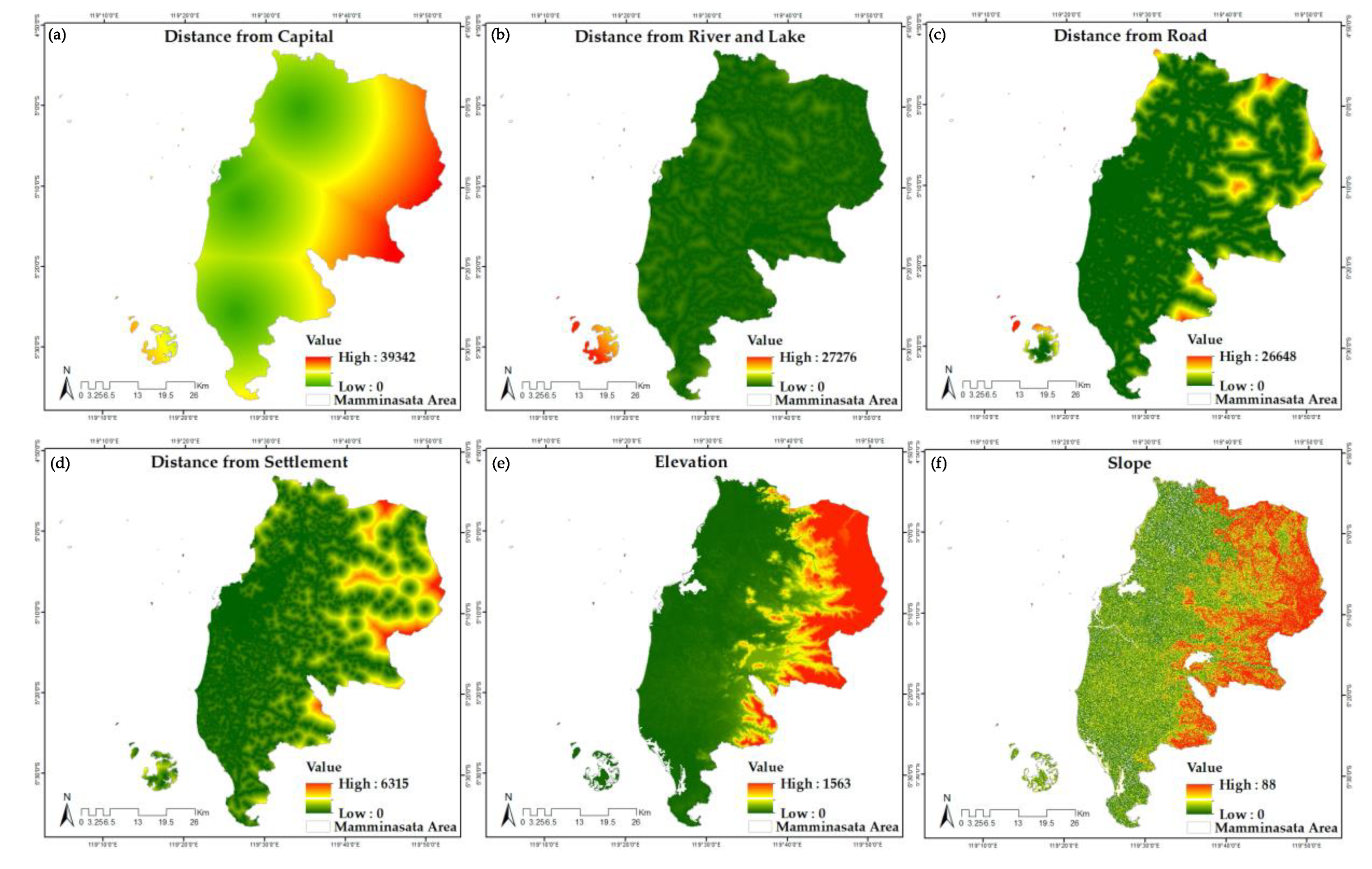
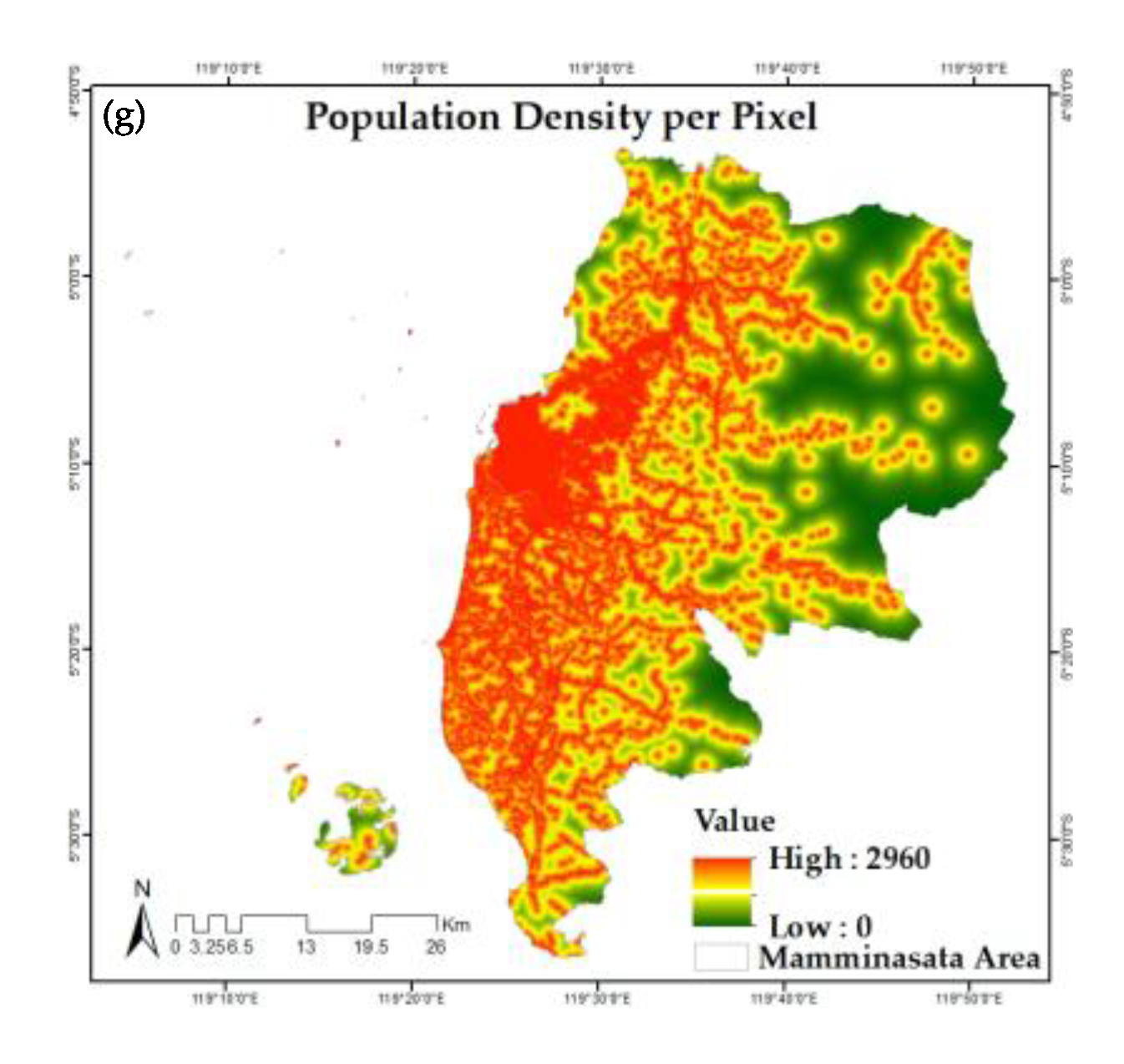
3.2.1. Driving Factors
- Kp:
- population density per pixel,
- p:
- population density of Mamminasata (= 981.29 people/km2 [52]),
- A:
- population distribution area (= 3.14 (2 km)2 = 12.56 km2),
- P:
- population proportion expressed by Equation (8),
- C:
- conversion factor, from 1 km2 to 1 pixel
- (= 30 m 30 m = 900 m2 = 9 10−4 km2 = 9 10−4 pixels).
3.2.2. Parameter Setting
3.3. Comparison with the Spatial Plan
4. Results
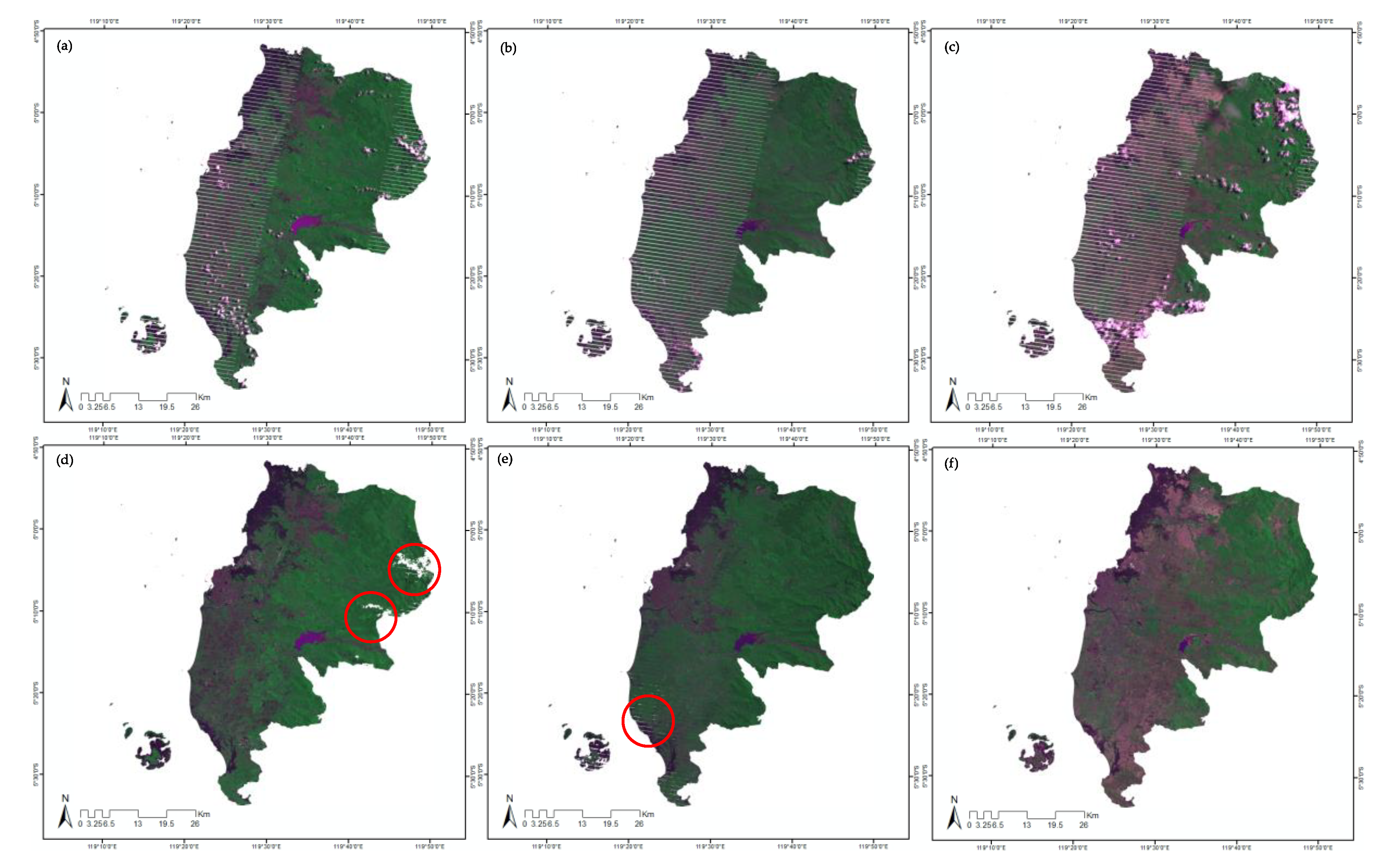
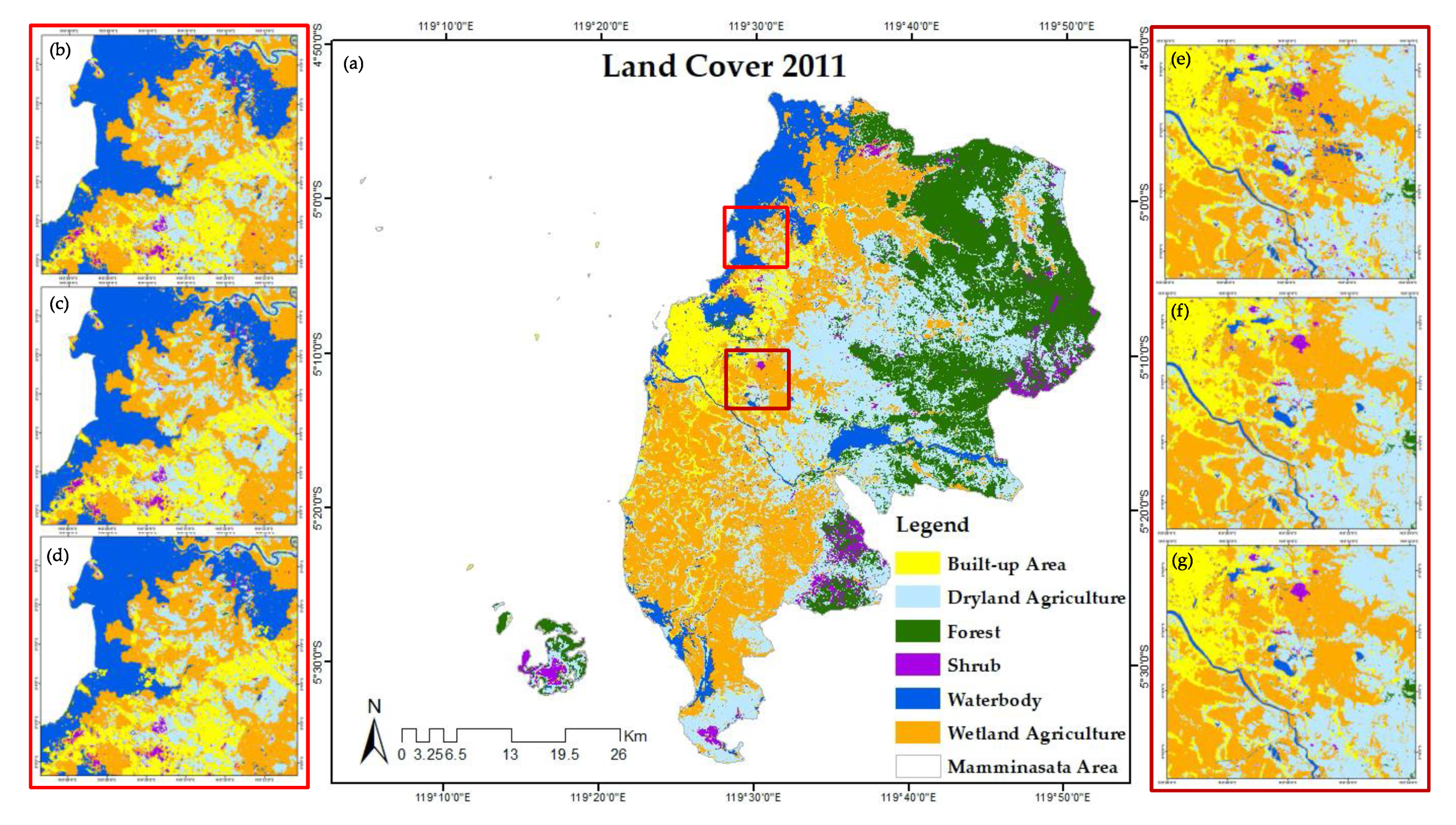
4.1. Land Cover Maps of 2006, 2011, and 2016
4.2. Land Cover Change Model
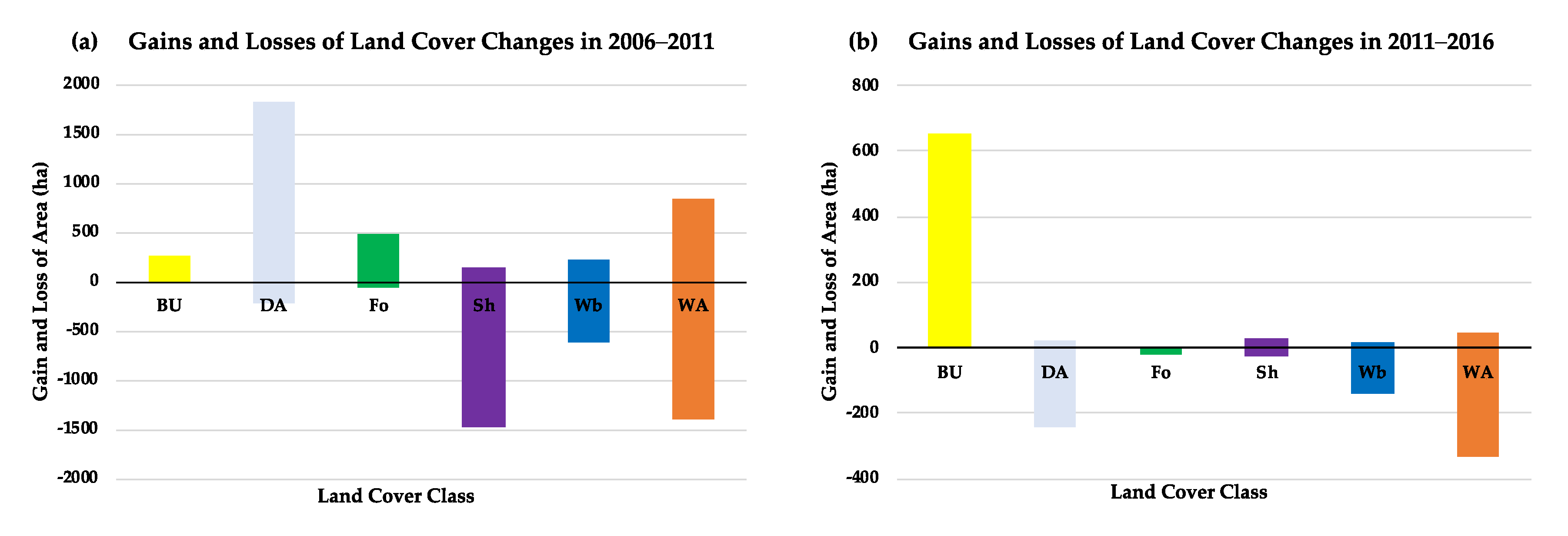
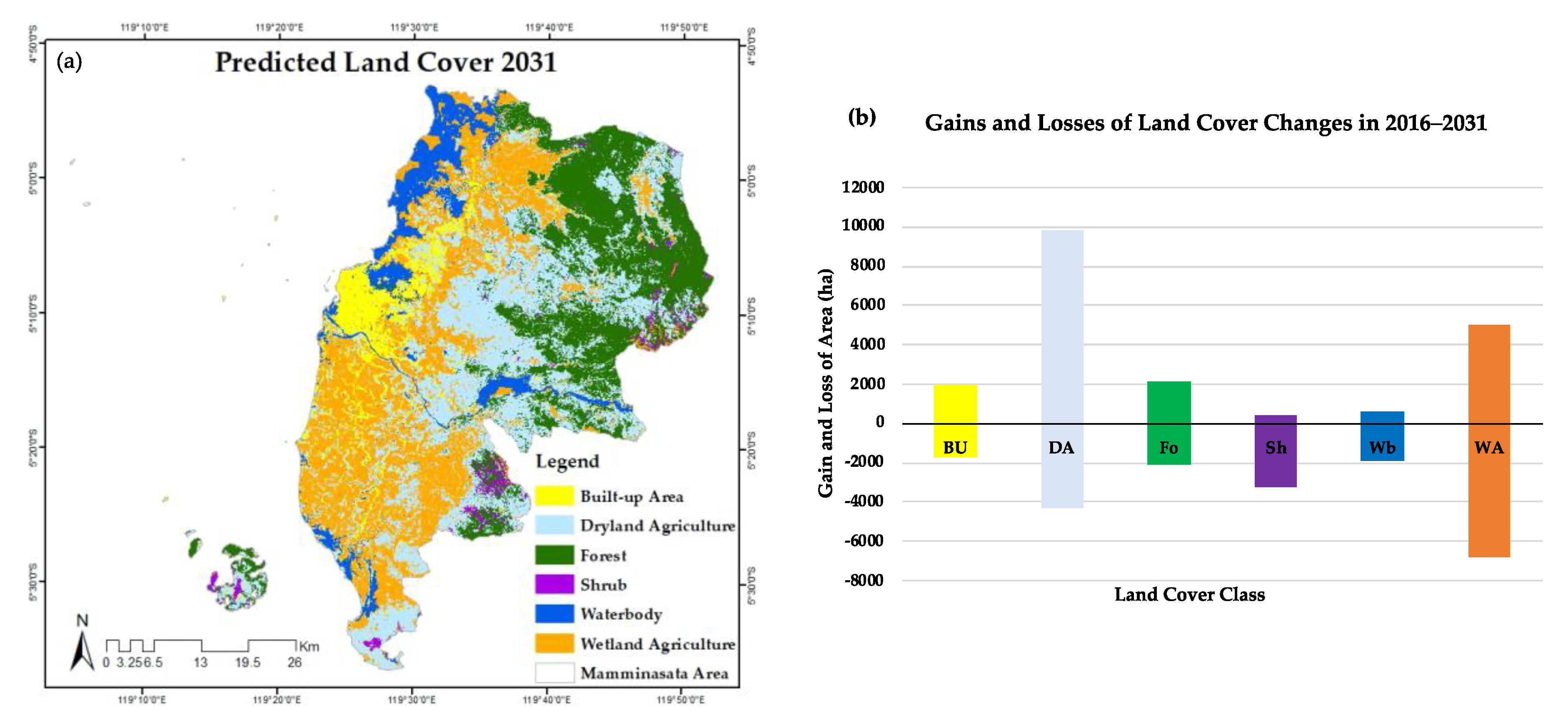
4.2.1. Land Cover Change Analysis
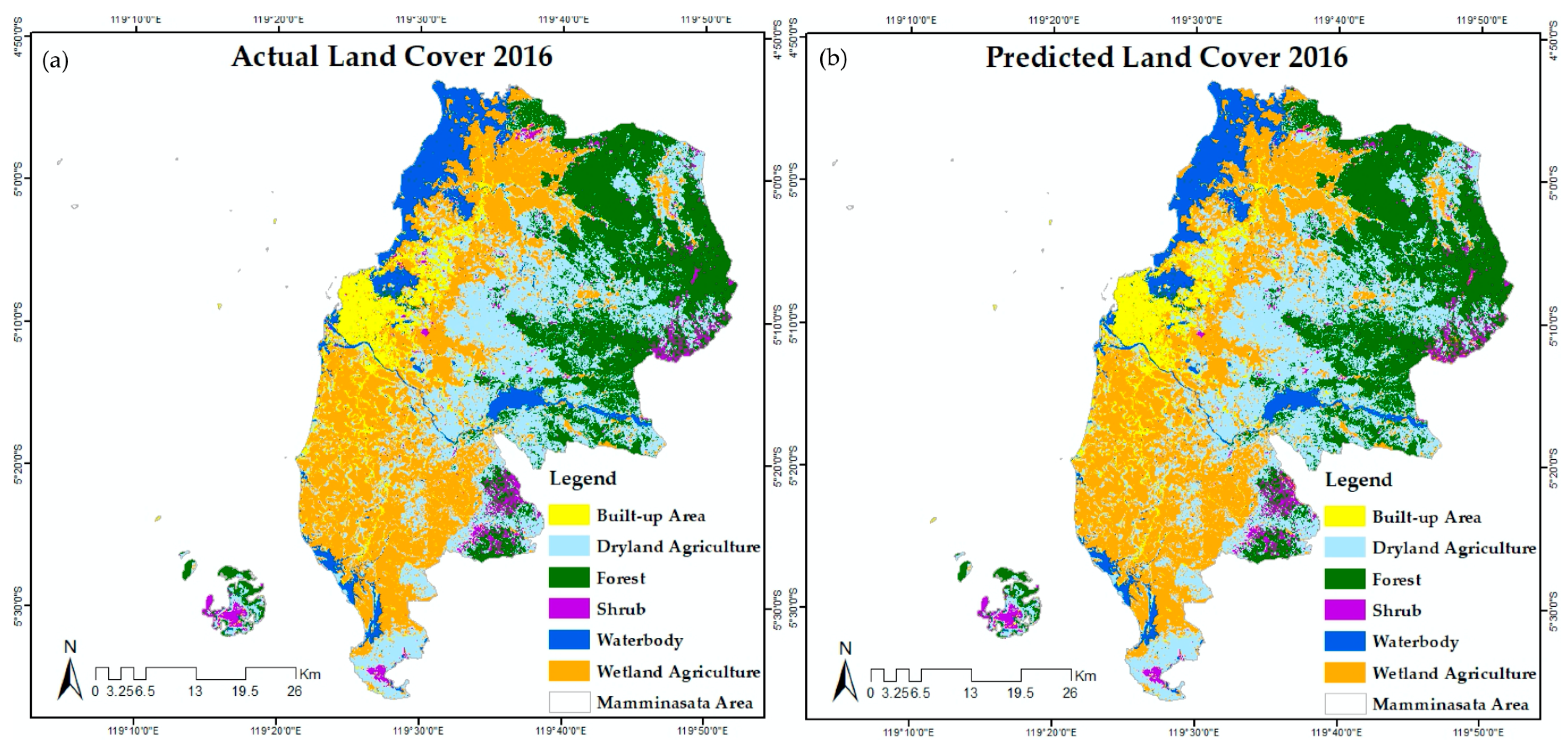
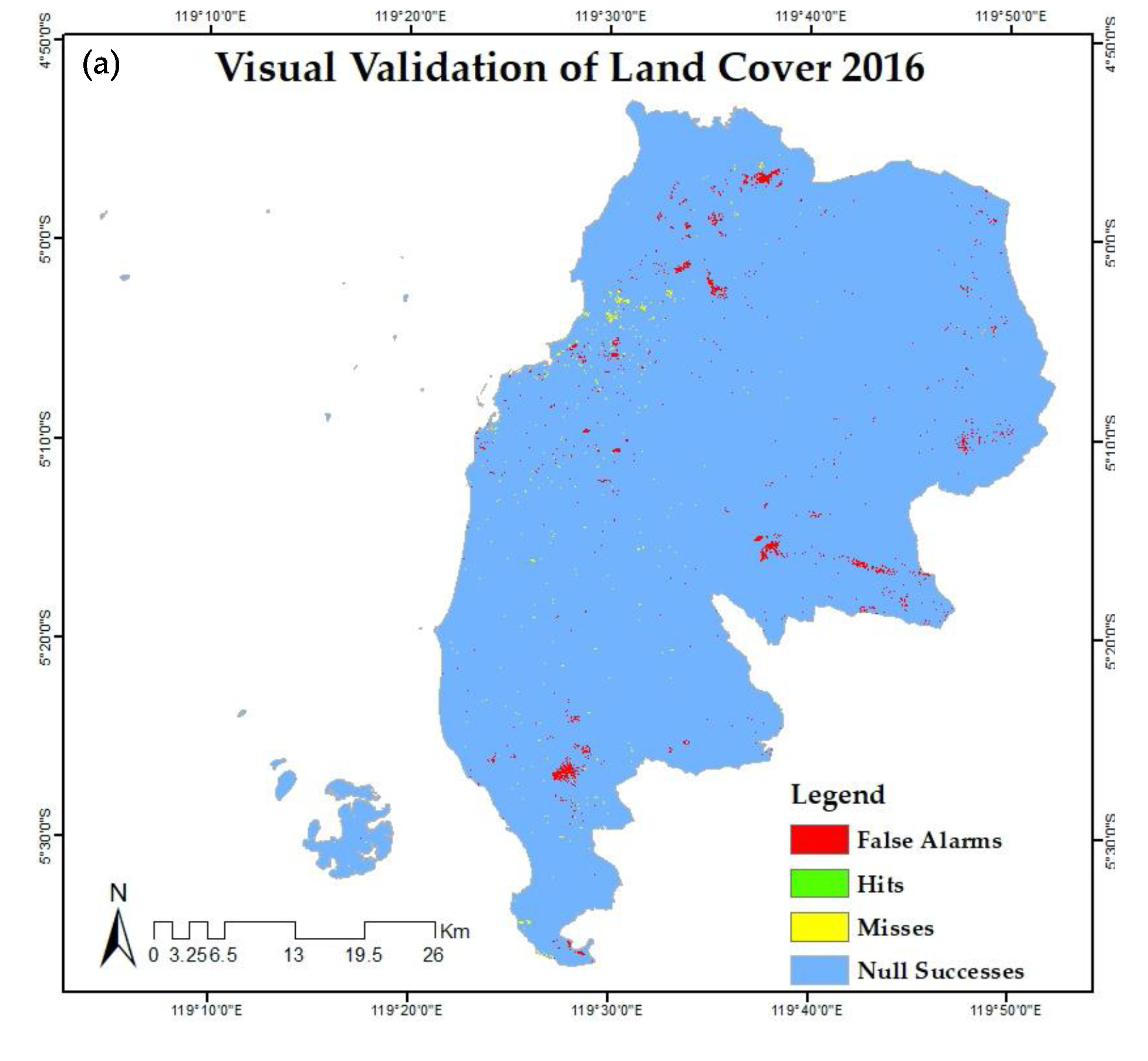
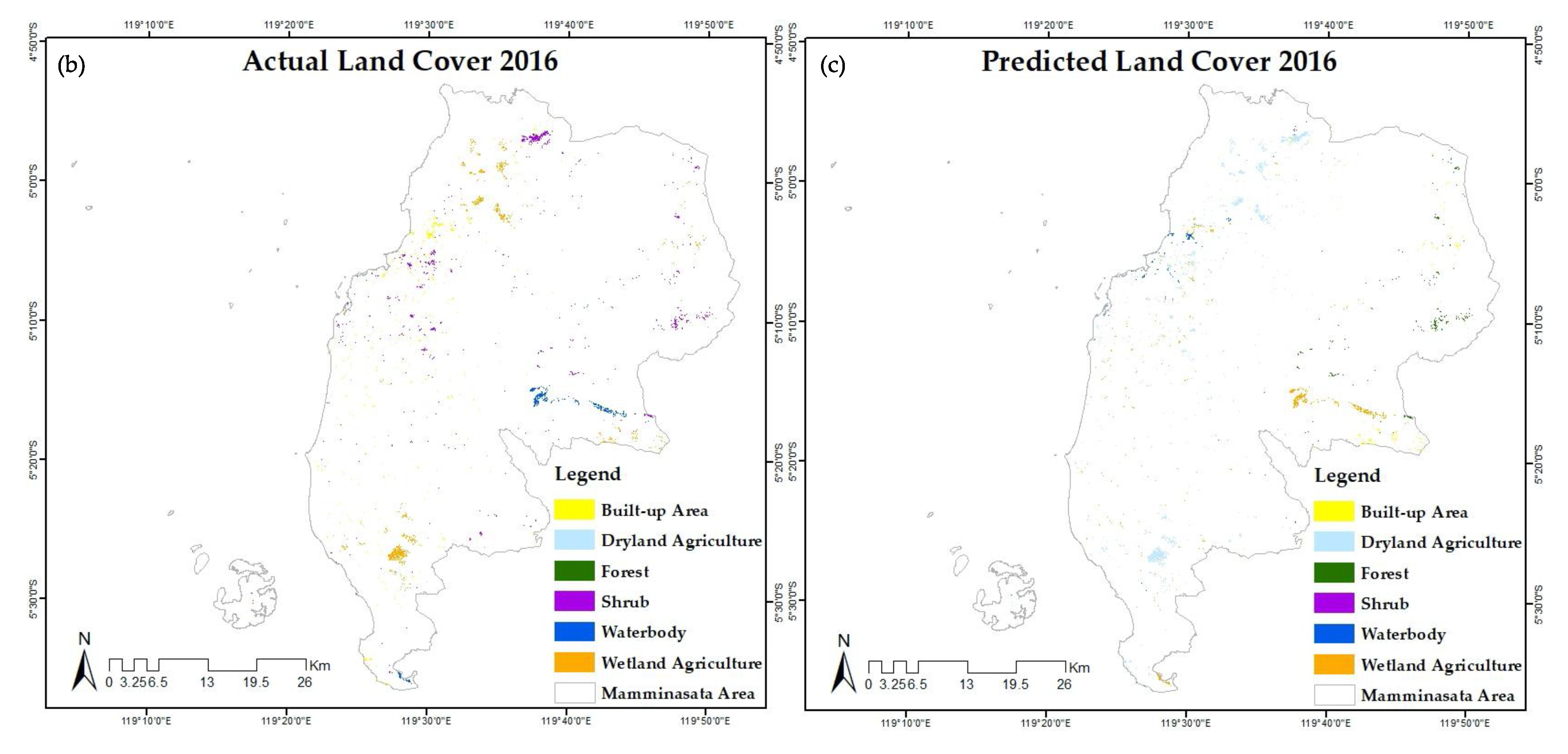
4.2.2. Land Cover Change Modeling
4.2.3. Land Cover Prediction for 2031
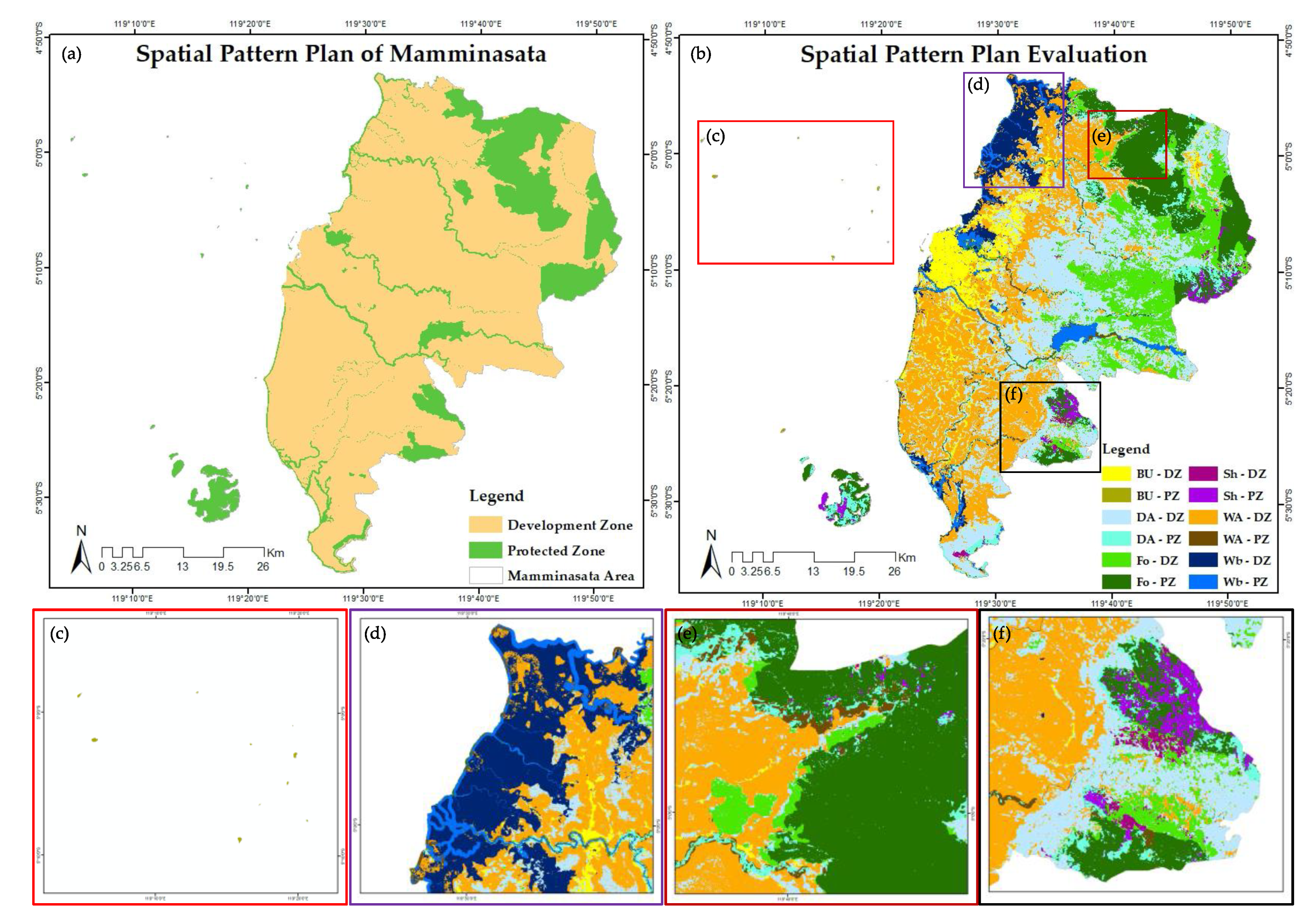
4.3. Comparing with the Spatial Plan
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. Agenda 21. In Proceedings of the United Nations Conference on Environment & Development, Rio de Janerio, Brazil, 3–14 June 1992; pp. 1–351. [Google Scholar]
- Purvis, B.; Mao, Y.; Robinson, D. Three pillars of sustainability: In search of conceptual origins. Sustain. Sci. 2018, 14, 681–695. [Google Scholar] [CrossRef] [Green Version]
- Scott, G.; Rajabifard, A. Sustainable development and geospatial information: A strategic framework for integrating a global policy agenda into national geospatial capabilities. Geo-Spat. Inf. Sci. 2017, 20, 59–76. [Google Scholar] [CrossRef] [Green Version]
- Hsu, S.; Perry, N. Sustainable Development in Malaysia and Indonesia; Palgrave Macmillan: New York, NY, USA, 2015; ISBN 9781137353078. [Google Scholar]
- Japan International Cooperation Agency: KRI International Corp.: Nippon Koei Co. Ltd. The Study on Implementation of Integrated Spatial Plan for The Mamminasata Metropolitan Area, South Sulawesi Province in Indonesia Final Report: Sector Study Report. 2006. Available online: https://openjicareport.jica.go.jp/340/340/340_108_11834108.html (accessed on 27 July 2020).
- García-Ruiz, J.M.; Lasanta, T.; Ruiz-Flano, P.; Ortigosa, L.; White, S.; González, C.; Martí, C. Land-use changes and sustainable development in mountain areas: A case study in the Spanish Pyrenees. Landsc. Ecol. 1996, 11, 267–277. [Google Scholar] [CrossRef]
- Musa, S.I.; Hashim, M.; Reba, M.N.M. Geospatial modelling of urban growth for sustainable development in the Niger Delta Region, Nigeria. Int. J. Remote Sens. 2018, 40, 1–29. [Google Scholar] [CrossRef]
- Salazar, E.; Henríquez, C.; Sliuzas, R.; Qüense, J. Evaluating spatial scenarios for sustainable development in Quito, Ecuador. ISPRS Int. J. Geo-Inf. 2020, 9, 141. [Google Scholar] [CrossRef] [Green Version]
- Sohl, T.; Wimberly, M.C.; Radeloff, V.C.; Theobald, D.M.; Sleeter, B.M. Divergent projections of future land use in the United States arising from different models and scenarios. Ecol. Model. 2016, 337, 281–297. [Google Scholar] [CrossRef] [Green Version]
- Chim, K.; Tunnicliffe, J.; Shamseldin, A.Y.; Ota, T. Land use change detection and prediction in Upper Siem Reap River, Cambodia. Hydrology 2019, 6, 64. [Google Scholar] [CrossRef] [Green Version]
- Losiri, C.; Nagai, M.; Ninsawat, S.; Shrestha, R.P. Modeling urban expansion in bangkok metropolitan region using demographic–economic data through cellular Automata-Markov chain and multi-layer perceptron-Markov chain models. Sustainability 2016, 8, 686. [Google Scholar] [CrossRef] [Green Version]
- Roy, H.G.; Fox, D.M.; Emsellem, K. Predicting land cover change in a mediterranean catchment at different time scales. Lect. Notes Comput. Sci. 2014, 8582, 315–330. [Google Scholar] [CrossRef]
- Pérez-Vega, A.; Mas, J.-F.; Ligmann-Zielinska, A. Comparing two approaches to land use/cover change modeling and their implications for the assessment of biodiversity loss in a deciduous tropical forest. Environ. Model. Softw. 2012, 29, 11–23. [Google Scholar] [CrossRef]
- Ozturk, D. Urban growth simulation of Atakum (Samsun, Turkey) using cellular Automata-Markov chain and multi-layer perceptron-Markov chain models. Remote Sens. 2015, 7, 5918–5950. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim-Mahmoud, M.; Duker, A.; Conrad, C.; Thiel, M.; Ahmad, H.S. Analysis of settlement expansion and urban growth modelling using geoinformation for assessing potential impacts of urbanization on climate in Abuja City, Nigeria. Remote Sens. 2016, 8, 220. [Google Scholar] [CrossRef] [Green Version]
- Pickard, B.R.; Gray, J.; Meentemeyer, R.K. Comparing quantity, allocation and configuration accuracy of multiple land change models. Land 2017, 6, 52. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, B.; Ahmed, R. Modeling urban land cover growth dynamics using multi-temporal satellite images: A case study of Dhaka, Bangladesh. ISPRS Int. J. Geo-Inf. 2012, 1, 3–31. [Google Scholar] [CrossRef] [Green Version]
- Tewolde, M.G.; Cabral, P. Urban sprawl analysis and modeling in Asmara, Eritrea. Remote Sens. 2011, 3, 2148–2165. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.; Reddy, C.S.; Pasha, S.V.; Dutta, K.; Saranya, K.; Satish, K.V. Modeling the spatial dynamics of deforestation and fragmentation using Multi-Layer Perceptron neural network and landscape fragmentation tool. Ecol. Eng. 2017, 99, 543–551. [Google Scholar] [CrossRef]
- Shade, C.; Kremer, P. Predicting land use changes in Philadelphia following green infrastructure policies. Land 2019, 8, 28. [Google Scholar] [CrossRef] [Green Version]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Digital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Lv, X.; Dou, F.; Yao, J. Change analysis in urban areas based on statistical features and temporal clustering using TerraSAR-X time-series images. Remote Sens. 2019, 11, 926. [Google Scholar] [CrossRef] [Green Version]
- Malila, W.A. Change vector analysis: An approach for detecting forest changes with Landsat. Mach. Process. Remote Sensed Data Symp. 1980, 326–335. [Google Scholar]
- Noi, P.T.; Kappas, M. comparison of random forest, k-nearest neighbor, and support vector machine classifiers for land cover classification using Sentinel-2 imagery. Sensors 2017, 18, 18. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Cardille, J.A.; Coe, M.T. Agricultural expansion in Mato Grosso from 1986–2000: A Bayesian time series approach to tracking past land cover change. Remote Sens. 2020, 12, 688. [Google Scholar] [CrossRef] [Green Version]
- Baeza, S.; Paruelo, J.M. Land use/land cover change (2000–2014) in the Rio de la Plata Grasslands: An analysis based on MODIS NDVI Time Series. Remote Sens. 2020, 12, 381. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Q.; Tollerud, H.J.; Barber, C.P.; Smith, K.; Zelenak, D. Training data selection for annual land cover classification for the land change monitoring, assessment, and projection (LCMAP) initiative. Remote Sens. 2020, 12, 699. [Google Scholar] [CrossRef] [Green Version]
- Jozdani, S.E.; Johnson, B.A.; Chen, D. Comparing deep neural networks, ensemble classifiers, and support vector machine algorithms for object-based urban land use/land cover classification. Remote Sens. 2019, 11, 1713. [Google Scholar] [CrossRef] [Green Version]
- Sharma, R.; Nehren, U.; Rahman, S.A.; Meyer, M.; Rimal, B.; Seta, G.A.; Baral, H. Modeling land use and land cover changes and their effects on biodiversity in Central Kalimantan, Indonesia. Land 2018, 7, 57. [Google Scholar] [CrossRef] [Green Version]
- Liping, C.; YuJun, S.; Saeed, S. Monitoring and predicting land use and land cover changes using remote sensing and GIS techniques—A case study of a hilly area, Jiangle, China. PLoS ONE 2018, 13, e0200493. [Google Scholar] [CrossRef]
- Turner, W.; Rondinini, C.; Pettorelli, N.; Mora, B.; Leidner, A.; Szantoi, Z.; Buchanan, G.; Dech, S.; Dwyer, J.L.; Herold, M.; et al. Free and open-access satellite data are key to biodiversity conservation. Biol. Conserv. 2015, 182, 173–176. [Google Scholar] [CrossRef] [Green Version]
- Central Bureau of Statistics. Gross Regional Domestic Product 2010; BPS Sulawesi Selatan: Makassar, Indonesia, 2011. (In Indonesian)
- Central Bureau of Statistics. Gross Regional Domestic Product of Regency/City in South Sulawesi 2011–2015; BPS Sulawesi Selatan: Makassar, Indonesia, 2016; ISBN 9786026426055. (In Indonesian)
- Central Bureau of Statistics. Gross Regional Domestic Product of Regency/City in South Sulawesi 2014–2018; BPS Sulawesi Selatan: Makassar, Indonesia, 2019; ISBN 9786026426840. (In Indonesian)
- Presidential Regulation No. 55. Spatial Plan of Makassar, Maros, Sungguminasa and Takalar Urban Area; Sekretariat Kabinet Republik Indonesia: Jakarta, Indonesia, 2011. (In Indonesian) [Google Scholar]
- United States Geological Survey (USGS). Earth Explorer. Available online: http://earthexplorer.usgs.gov (accessed on 19 November 2019).
- Fisher, A.G. Cloud and cloud-shadow detection in SPOT5 HRG imagery with automated morphological feature extraction. Remote Sens. 2014, 6, 776–800. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Liu, D.; Chen, J. A new geostatistical approach for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2012, 124, 49–60. [Google Scholar] [CrossRef]
- Yin, G.; Mariethoz, G.; McCabe, M. Gap-filling of Landsat 7 imagery using the direct sampling method. Remote Sens. 2016, 9, 12. [Google Scholar] [CrossRef] [Green Version]
- Huang, K.-C.; Huang, T.C.C. Simulation of land-cover change in Taipei metropolitan area under climate change impact. IOP Conf. Ser. Earth Environ. Sci. 2014, 18, 12106. [Google Scholar] [CrossRef] [Green Version]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.M.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Aruna, S.; Rajagopalan, S. A novel SVM based CSSFFS feature selection algorithm for detecting breast cancer. Int. J. Comput. Appl. 2011, 31, 14–20. [Google Scholar]
- Parikh, K.S.; Shah, T.P. Support vector machine—A large margin classifier to diagnose skin illnesses. Procedia Technol. 2016, 23, 369–375. [Google Scholar] [CrossRef] [Green Version]
- Alimuddin, I. Irwan The application of Sentinel 2B satellite imagery using supervised image classification of maximum likelihood algorithm in landcover updating of the Mamminasata Metropolitan Area, South Sulawesi. IOP Conf. Ser. Earth Environ. Sci. 2019, 280, 1–8. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J. Change detection techniques for remote sensing applications: A survey. Earth Sci. Inform. 2019, 12, 143–160. [Google Scholar] [CrossRef]
- Megahed, Y.; Cabral, P.; Silva, J.; Caetano, M. Land cover mapping analysis and urban growth modelling using remote sensing techniques in Greater Cairo Region—Egypt. ISPRS Int. J. Geo-Inf. 2015, 4, 1750–1769. [Google Scholar] [CrossRef] [Green Version]
- Eastman, J.R. Terrset-Manual; Clark Labs, Clark University: Worcester, MA, USA, 2016; p. 01610-1477. [Google Scholar]
- Pontius, R.G.; Boersma, W.; Castella, J.-C.; Clarke, K.C.; De Nijs, T.; Dietzel, C.; Duan, Z.; Fotsing, E.; Goldstein, N.; Kok, K.; et al. Comparing the input, output, and validation maps for several models of land change. Ann. Reg. Sci. 2007, 42, 11–37. [Google Scholar] [CrossRef] [Green Version]
- Central Bureau of Statistics. Sulawesi Selatan in Figures; BPS Sulawesi Selatan: Makassar, Indonesia, 2012. (In Indonesian)
- Alberto, A.; Dasanto, B.D. Model perubahan penggunaan lahan dan pendugaan cadangan karbon di daerah aliran sungai Cisadane, Jawa Barat Landuse change model and carbon stock estimation in Cisadane Watershed, West Java. Agromet 2010, 24, 18–26. [Google Scholar] [CrossRef]
- Lay, U.S.; Pradhan, B.; Yusoff, Z.; Abdullah, A.F.; Aryal, J.; Park, H.-J. Data mining and statistical approaches in debris-flow susceptibility modelling using airborne LiDAR data. Sensors 2019, 19, 3451. [Google Scholar] [CrossRef] [Green Version]
- Zubair, O.A.; Ji, W.; Weilert, T. Modeling the Impact of Urban Landscape Change on Urban Wetlands Using Similarity Weighted Instance-Based Machine Learning and Markov Model. Sustainability 2017, 9, 2223. [Google Scholar] [CrossRef] [Green Version]
- Nadoushan, M.A.; Soffianian, A.; Alebrahim, A. Predicting urban expansion in Arak Metropolitan Area using two land change models. World Appl. Sci. J. 2012, 18, 1124–1132. [Google Scholar] [CrossRef]
- Kim, I.; Jeong, G.; Park, S.; Tenhunen, J. Predicted land use change in the Soyang River Basin, South Korea. In Proceedings of the 2011 TERRECO Science Conference, Garmisch-Partenkirchen, Germany, 2–7 October 2011; pp. 17–24. [Google Scholar]
- Ministry of Agrarian and Spatial Planning Regulation No. 1. Spatial Plan Drafting Guidelines for Province, Regency and City; Sekretariat Kabinet Republik Indonesia: Jakarta, Indonesia, 2018. (In Indonesian)
- Indonesian Regulation No. 26. Spatial Plan; Sekretariat Kabinet Republik Indonesia: Jakarta, Indonesia, 2007. (In Indonesian) [Google Scholar]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Trisurat, Y.; Shirakawa, H.; Johnston, J.M. Land-use/land-cover change from socio-economic drivers and their impact on biodiversity in Nan province, Thailand. Sustainability 2019, 11, 649. [Google Scholar] [CrossRef] [Green Version]
- Ustaoglu, E.; Aydınoglu, A. Regional variations of land-use development and land-use/cover change dynamics: A case study of Turkey. Remote Sens. 2019, 11, 885. [Google Scholar] [CrossRef] [Green Version]
- Indonesian Regulation No. 41. Protection for Sustainable Agriculture Land; Sekretariat Kabinet Republik Indonesia: Jakarta, Indonesia, 2009. (In Indonesian) [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Satellite and Sensor | Observation Dates | |
|---|---|---|---|
| 2006 | Landsat 7 ETM+ | 15/05/2005 | 21/07/2006 |
| 11/02/2006 | 07/09/2006 | ||
| 2011 | Landsat 7 ETM+ | 10/03/2010 | 21/09/2011 |
| 11/04/2010 | 31/03/2012 | ||
| 27/04/2010 | 09/10/2012 | ||
| 29/05/2010 | 18/03/2013 | ||
| 02/09/2010 | 22/06/2013 | ||
| 13/03/2011 | 08/07/2013 | ||
| 16/05/2011 | 25/08/2013 | ||
| 03/07/2011 | 26/09/2013 | ||
| 05/09/2011 | |||
| 2016 | Landsat 8 OLI | 15/02/2016 | 24/07/2016 |
| 05/05/2016 | 10/09/2016 | ||
| Scene 1 | Scene 2 | Scene 3 | |
|---|---|---|---|
| Step 1 | 11/04/2010 27/04/2010 | 03/07/2011 22/06/2013 | 05/09/2011 21/09/2011 |
| Step 2 | 16/05/2011 13/03/2011 31/03/2012 10/03/2010 18/03/2013 29/05/2010 | 08/07/2013 02/09/2010 25/08/2013 | 09/10/2012 26/09/2013 02/09/2010 25/08/2013 |
| 2006 | 2016 |
|---|---|
| 12/02/2012–11/02/2006 16/05/2011–15/05/2005 03/07/2011–21/07/2006 05/09/2011–07/09/2006 | 12/02/2012–15/02/2016 16/05/2011–05/05/2016 03/07/2011–24/07/2016 05/09/2011–10/09/2016 |
| Classification Class | Total Row | PA | |||||||
|---|---|---|---|---|---|---|---|---|---|
| BU | DA | Fo | Sh | Wb | WA | ||||
| Ground Truth | BU | 82 | 2 | 0 | 1 | 1 | 0 | 86 | 0.95 |
| DA | 7 | 67 | 0 | 0 | 1 | 0 | 75 | 0.89 | |
| Fo | 11 | 22 | 98 | 25 | 3 | 4 | 163 | 0.60 | |
| Sh | 0 | 7 | 2 | 63 | 0 | 2 | 74 | 0.85 | |
| Wb | 0 | 2 | 0 | 5 | 93 | 2 | 102 | 0.91 | |
| WA | 0 | 0 | 0 | 6 | 2 | 92 | 100 | 0.92 | |
| Total Column | 100 | 100 | 100 | 100 | 100 | 100 | 600 | ||
| UA | 0.82 | 0.67 | 0.98 | 0.63 | 0.93 | 0.92 | |||
| OA | 0.83 | ||||||||
| AoC | 0.17 | ||||||||
| KC | 0.79 | ||||||||
| Variable | Overall Cramer’s V |
|---|---|
| Distance from Capital | 0.3230 |
| Distance from River and Lake | 0.1103 |
| Distance from Road | 0.1965 |
| Distance from Settlement | 0.2542 |
| Elevation | 0.3263 |
| Slope | 0.2888 |
| Population Density per Pixel | 0.4920 |
| Type of Kappa | Kappa Value | |
|---|---|---|
| Whole Area | Different Areas | |
| No information | 0.9961 | 0.9973 |
| Grid-cell level location | 0.9974 | 0.7821 |
| Stratum-level location | 0.9974 | 0.7821 |
| Standard | 0.9925 | 0.6544 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakim, A.M.Y.; Matsuoka, M.; Baja, S.; Rampisela, D.A.; Arif, S. Predicting Land Cover Change in the Mamminasata Area, Indonesia, to Evaluate the Spatial Plan. ISPRS Int. J. Geo-Inf. 2020, 9, 481. https://doi.org/10.3390/ijgi9080481
Hakim AMY, Matsuoka M, Baja S, Rampisela DA, Arif S. Predicting Land Cover Change in the Mamminasata Area, Indonesia, to Evaluate the Spatial Plan. ISPRS International Journal of Geo-Information. 2020; 9(8):481. https://doi.org/10.3390/ijgi9080481
Chicago/Turabian StyleHakim, Andi Muhammad Yasser, Masayuki Matsuoka, Sumbangan Baja, Dorothea Agnes Rampisela, and Samsu Arif. 2020. "Predicting Land Cover Change in the Mamminasata Area, Indonesia, to Evaluate the Spatial Plan" ISPRS International Journal of Geo-Information 9, no. 8: 481. https://doi.org/10.3390/ijgi9080481
APA StyleHakim, A. M. Y., Matsuoka, M., Baja, S., Rampisela, D. A., & Arif, S. (2020). Predicting Land Cover Change in the Mamminasata Area, Indonesia, to Evaluate the Spatial Plan. ISPRS International Journal of Geo-Information, 9(8), 481. https://doi.org/10.3390/ijgi9080481