
A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method


Abstract
:1. Introduction
2. Related Work
- A range of machine learning methods such as random forest, artificial neural network, decision tree, support vector machine, k-NN, gradient boosted trees, naïve bayes, and deep learning have been used by researchers to develop fall detection systems. Still, the best machine learning method in terms of performance accuracy for the development of such systems and applications is unknown. Thus far, none of the works in this field have compared the performance characteristics of different machine learning approaches to deduce the optimal learning approach.
- Most of the fall detection frameworks developed so far have been binary classifiers where the framework would classify a motion or a posture as fall or not a fall. There is a high possibility of fall-like motions such as being on all fours leading to false positives. Such false positives can cause alert fatigue [44] in caregivers or medical personnel. Alert fatigue can lead to caregivers or medical personal becoming desensitized to alarms for falls, causing a decrease in quality of care or even no timely care. Therefore, it is necessary to detect falls and such fall-like motions when monitoring human activities.
- Some of the works [19,20,21,22,23,24] that focused on detecting false positives and studying fall-like motions did not achieve high levels of performance accuracy in terms of detecting falls. Thus, it is the need of the hour that fall detection systems be developed in a way that minimizes false positives and can detect fall-like motions while achieving high levels of performance accuracy so that the underlining systems are considered reliable and can be trusted.
- Falls can be fatal if the fall is associated with a long lie [13,14,15]. A long lie can be detected by tracking whether the person who experienced a fall could get up after the fall. None of the above works have focused on implementing such an approach. Therefore, it is necessary for the future of fall detection systems to detect falls as well as long lies.
3. Machine Learning-Based Approach for Detecting Falls and Fall-Like Motions
3.1. Methodology and System Architecture of the Machine Learning-Based Approach for Detecting Falls and Fall-Related Motions
- = cosine value of the angle between the acceleration vector and the X-axis
- An(x) = acceleration in the X-direction
- An(y) = acceleration in the Y-direction
- An(z) = acceleration in the Z-direction
- Calculate “d(x, xi)” i = 1, 2, ….., n; where d denotes the Euclidean distance between the points.
- Arrange the calculated n Euclidean distances in non-decreasing order.
- Let k be a +ve integer, take the first k distances from this sorted list.
- Find those k-points corresponding to these k-distances.
- Let ki denotes the number of points belonging to the ith class among k points, i.e., k ≥ 0.
- If ki >kj ∀ i ≠ j, then put x in class i.
3.2. Results of the Machine Learning-Based Approach for Detecting Falls and Fall-Related Motions
- Overall_Accuracy = overall accuracy of the machine learning method
- True_P = true positive
- True_N = true negative
- Class_Precision = sub class precision
4. Comparative Study of Different Machine Learning Methods to Deduce the Best Machine Learning Method for Fall Detection Systems
4.1. Methodology for the Comparative Study of Different Machine Learning Approaches
- Develop an operator that can track and analyze different postural orientations of the user by using Equation (1) and likewise calculate the orientation angles along the other two axes to detect falls and fall-related motions.
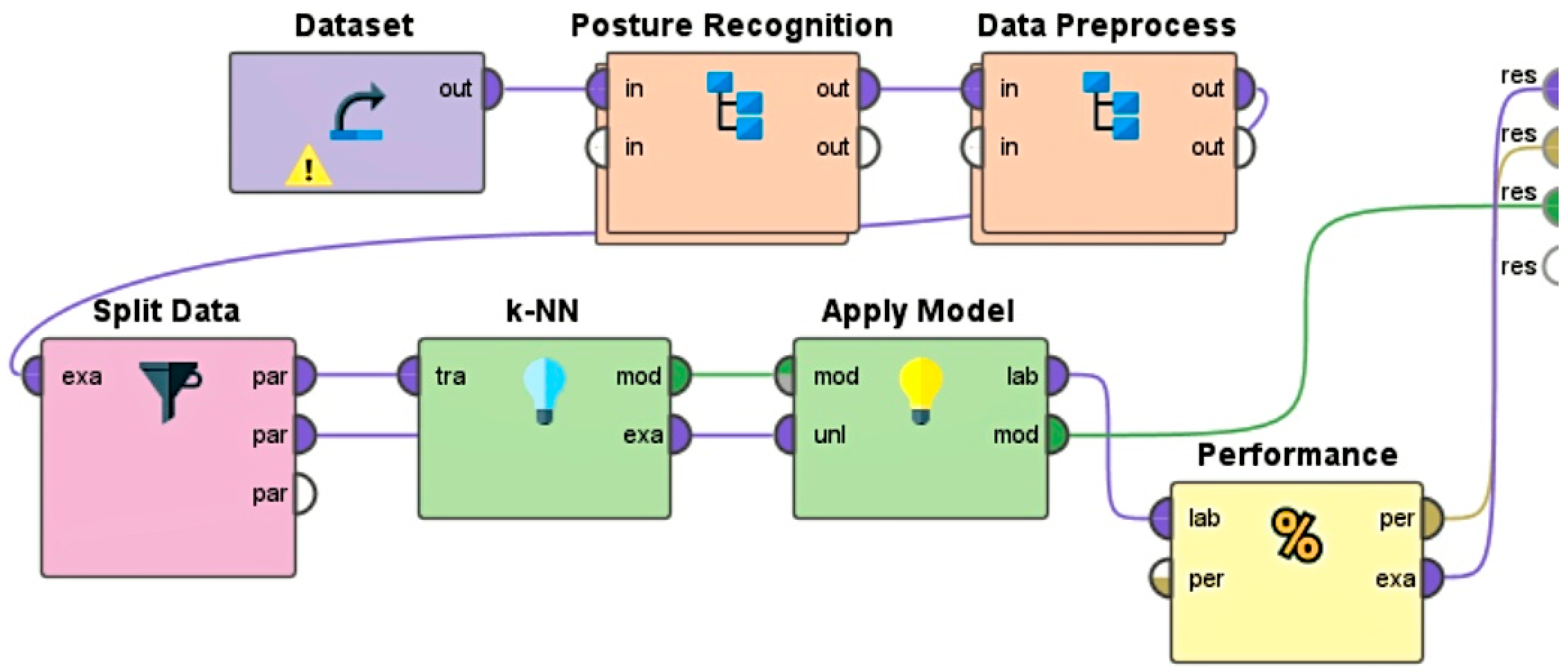
- Develop an operator to preprocess the data, which consists of functionalities to (a) filter out and use the readings of the accelerometer data collected from the accelerometer placed on the user’s chest and (b) remove any unnecessary attributes that are not necessary for the development of the classifier.
- Use the “split data” operator to split the data into the training set and test set, with 80% data for training and the rest for testing.
- Develop and implement a machine learning approach out of random forest, artificial neural network, decision tree, multiway decision tree, support vector machine, k-NN, gradient boosted trees, ID3, decision stump, CHAID, AutoMLP, linear regression, vector linear regression, random tree, naïve bayes, naïve bayes (kernel), linear discriminant analysis, quadratic discriminant analysis, and deep learning [53] each time for the development of this RapidMiner process. Separate RapidMiner processes were developed for each of these learning approaches.
- Train the learning method using the training data and implement it on the test data by using the “apply model” operator.
- Evaluate the performance characteristics of the learning approach in terms of overall accuracy and subclass precision values as per Equations (2) and (3) by using the performance operator.
- Compare the findings of Step (7) for each of the learning methods mentioned in Step (5) to deduce the best machine learning approach in terms of accuracy.
- Repeat Step 8 for both datasets to detect and track the consistency in the findings.
4.2. Results of the Comparative Study of Different Machine Learning Approaches
- In order of decreasing overall performance accuracy, these machine learning methods can be arranged as k-NN > artificial neural network > AutoMLP > gradient boosted trees > multiway decision tree > deep learning > random forest > decision tree > naïve bayes (kernel) > linear regression > random tree > support vector machine > ID3 > CHAID > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis > naïve bayes.
- In order of decreasing class precision value for the detection of a falling motion, these machine learning methods can be arranged as k-NN > random forest > decision tree > deep learning > AutoMLP > artificial neural network > naïve bayes > naïve bayes (kernel) > gradient boosted trees > multiway decision tree > linear regression > random tree > support vector machine > ID3 > CHAID > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis.
- In order of decreasing class precision value for the detection of a lying motion, these machine learning methods can be arranged as k-NN > artificial neural network > AutoMLP > gradient boosted trees > multiway decision tree > naïve bayes (kernel) > decision tree > random forest > deep learning > random tree > linear regression > naïve bayes > support vector machine > ID3 > CHAID > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis.
- In order of decreasing class precision value for the detection of standing up from a lying motion, these machine learning methods can be arranged as k-NN > random forest > artificial neural network > AutoMLP > gradient boosted trees > ID3 > multiway decision tree > CHAID > deep learning > decision tree > naïve bayes (kernel) > naïve bayes > random tree > linear regression > support vector machine > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis.
- In order of decreasing class precision value for the detection of being on all fours, these machine learning methods can be arranged as random forest > k-NN > decision tree > artificial neural network > deep learning > ID3 > CHAID > AutoMLP > gradient boosted trees > multiway decision tree > naïve bayes (kernel) > naïve bayes > random tree > linear regression > support vector machine > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis.
- In order of decreasing class precision value for the detection of other activities, these machine learning methods can be arranged as k-NN > AutoMLP > gradient boosted trees > artificial neural network > deep learning > multiway decision tree > naïve bayes (kernel) > decision tree > support vector machine > random forest > linear regression > random tree > ID3 > CHAID > decision stump > vector linear regression > linear discriminant analysis > quadratic discriminant analysis > naïve bayes.
- In order of decreasing overall performance accuracy, these machine learning methods can be arranged as k-NN > decision tree > multiway decision tree > gradient boosted trees > decision stump > random tree > quadratic discriminant analysis > deep learning > random forest > naïve bayes (kernel) > artificial neural network > support vector machine > AutoMLP > linear regression > naïve bayes > linear discriminant analysis > ID3 > CHAID > vector linear regression.
- In order of decreasing class precision value for the detection of falls, these machine learning methods can be arranged as k-NN > gradient boosted trees > naïve bayes (kernel) > artificial neural network > support vector machine > AutoMLP > linear regression > naïve bayes > linear discriminant analysis > decision tree > multiway decision tree > decision stump > random tree > quadratic discriminant analysis > deep learning > random forest > ID3 > CHAID > vector linear regression.
- In order of decreasing class precision value for the detection of other activities (labelled as “not a fall” in the dataset), these machine learning methods can be arranged as decision tree = multiway decision tree = decision stump = random tree = quadratic discriminant analysis = deep learning > random forest > k-NN > gradient boosted trees > naïve bayes (kernel) > AutoMLP > linear regression > naïve bayes > linear discriminant analysis > artificial neural network > support vector machine > ID3 > CHAID > vector linear regression.
5. Improving the Performance Accuracy of the k-NN Approach for Detection of Falls and Fall-Related Motions
5.1. Methodology for Improving the Performance Accuracy of the k-NN Approach for the Detection of Falls and Fall-Related Motions
| Algorithm 1 AdaBoost algorithm |
| Input: examples, set of N labeled examples (x1, y1),…,(xN, yN) Local Variables: w, a vector of N example weights, initially 1 ⁄ N h, a vector of K hypotheses z, a vector of K hypothesis weights Output: weighted-majority hypothesis function AdaBoost (examples, L, K) returns a weighted-majority hypothesis L, a learning algorithm K, the number of hypotheses in the ensemble 1: for k = 1 to K, do 2: h[k] ← L(examples, w) 3: error ← 0 4: for j = 1 to N, do 5: if h[k](xj) ≠ yj then error ← error + w[j] 6: for j = 1 to N, do 7: if h[k](xj) = yj then w[j] ← w[j] · error ⁄ (1 − error) 8: w ← Normalize(w) 9: Z[k] ← log(1 − error) ⁄ error 10: return Weighted-Majority(h, z) |
- Shuffle the dataset randomly.
- Split the dataset into k groups.
- For each unique group:
- Take the group as a holdout or test data set.
- Take the remaining groups as a training data set.
- Fit a model on the training set and evaluate it on the test set.
- Retain the evaluation score and discard the model.
- Summarize the skill of the model using the sample of model evaluation scores.
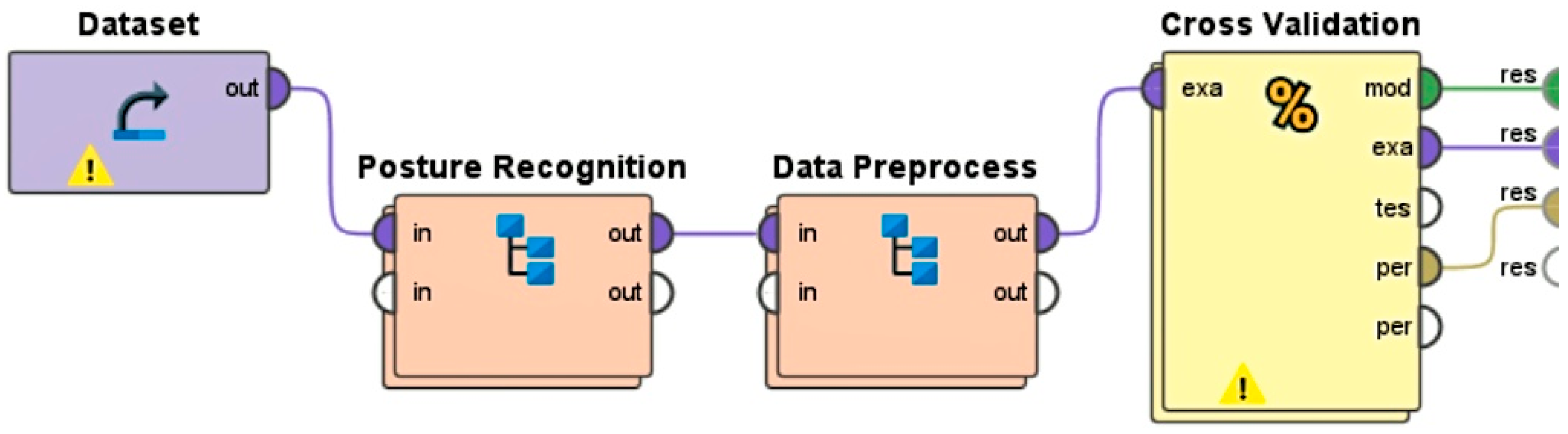
- Disable or delete all the other operators in the process (Figure 2) other than the dataset, posture recognition, and data preprocess operators.
- Import the cross-validation operator into the process.
- Customize the functionality of the cross-validation operator to define the number of folds and sampling type.
- Customize the training subprocess of the cross-validation operator.
- The cross-validation operator has 10 folds.
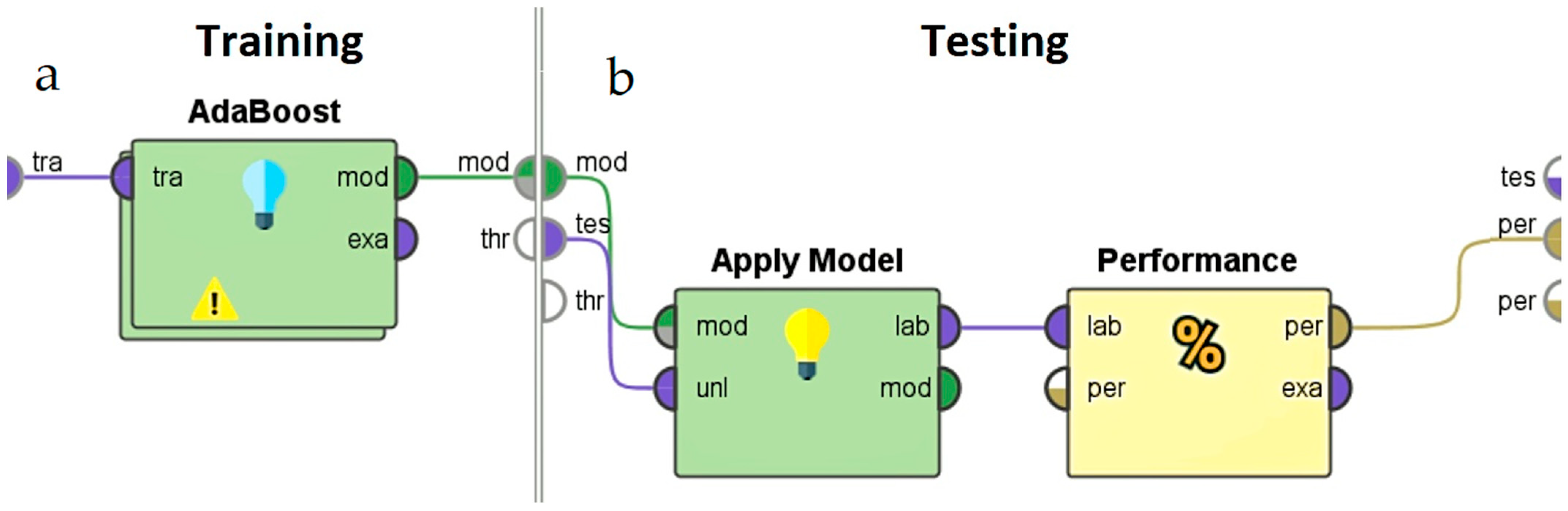
- Import the AdaBoost operator into the subprocess with the AdaBoost consisting of 10 iterations.
- Customize the AdaBoost operator by defining the number of iterations.
- Define the AdaBoost operator’s work by developing the process that it must iterate.
- The definition in (d) above consists of developing the RapidMiner process shown in Figure 2, in partial form, using only the dataset, posture recognition, data preprocess, and k-NN operators.
- Add specifications to the k-NN learning method.
- The value of “k” = the number of labels in the attribute being predicted from the test data.
- Use the weighted vote approach.
- The measure type is numerical measures, with the specific numerical measure being Camberra Distance.
- Customize the testing subprocess of the cross-validation operator.
- Import the “apply model” operator to apply the learning method.
- Include the performance operator and customize the same so that the performance is evaluated using a confusion matrix that shows the overall accuracy and the respective class precision values.
- Update the functionality of the performance operator to use example weights.
5.2. Results of the Methodology for Improving the Performance Accuracy of the k-NN Approach for the Detection of Falls and Fall-Related Motions
6. Comparative Discussion
- There is need for a study that deduces the optimal machine learning approach for fall detection: A range of machine learning methods such as random forest [32,33], artificial neural network [30,31,35], decision tree [26,27,42], support vector machine [25,28], k-NN [17], gradient boosted trees [40,41], naïve bayes [38,39], and deep learning [23,36] have been used by researchers in the last few years (Table 2). However, no study has been conducted in this field thus far that compares the performance characteristics of these machine learning approaches for fall detection to deduce the best learning approach for the same. Moreover, no prior work in this field (Table 1 and Table 2) has been associated with the development, implementation, and evaluation of such a wide range of machine learning-based fall detection systems. This paper takes a comprehensive approach to address this challenge. We conducted a comprehensive study of 19 machine learning approaches for fall detection, which included random forest, artificial neural network, decision tree, multiway decision tree, support vector machine, k-NN, gradient boosted trees, ID3, decision stump, CHAID, AutoMLP, linear regression, vector linear regression, random tree, naïve bayes, naïve bayes (kernel), linear discriminant analysis, quadratic discriminant analysis, and deep learning. The approach was tested on two different datasets [50,51] and the results (Table 3 and Table 4) were consistent from the two datasets. The results show that the k-NN based-machine learning method outperformed all the other machine learning methods for the detection of falls and fall-like motions.
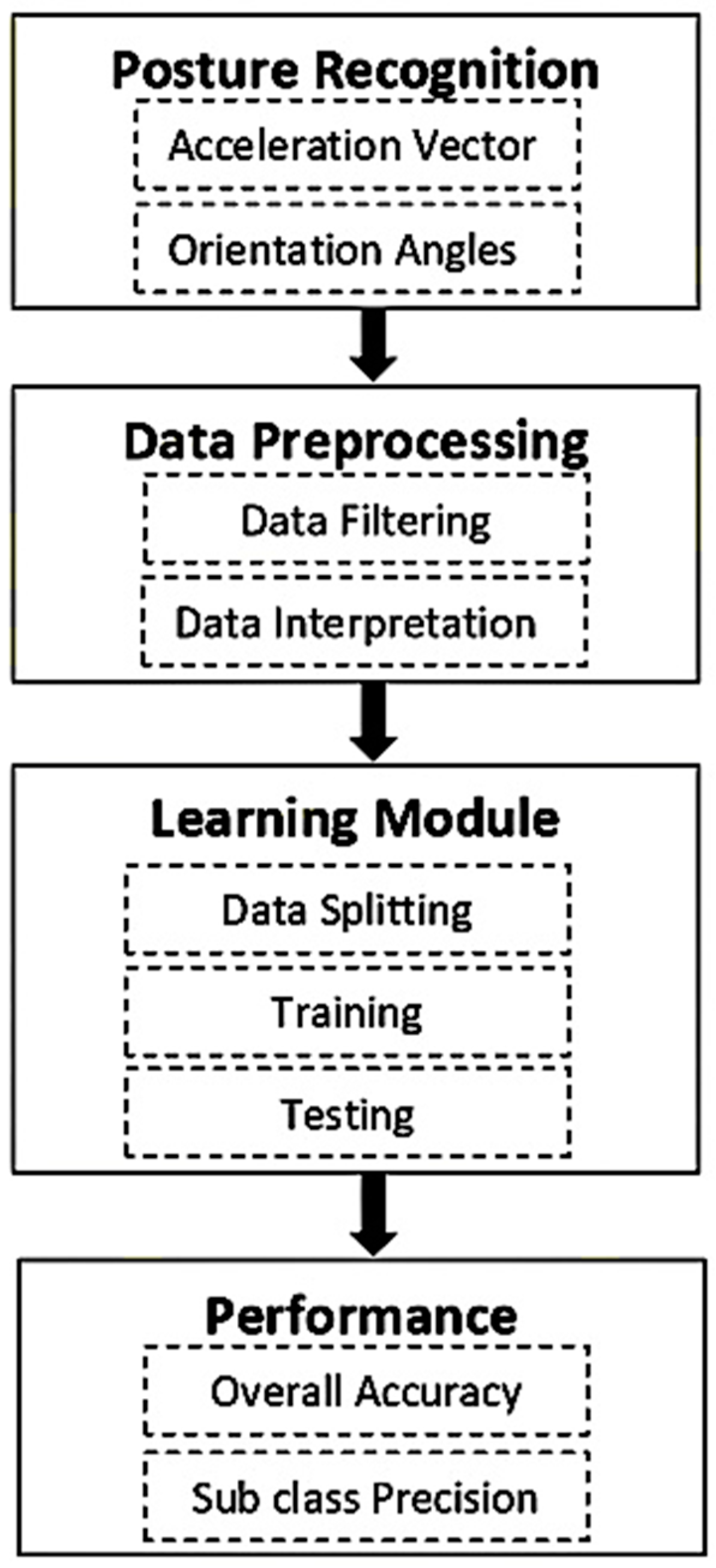
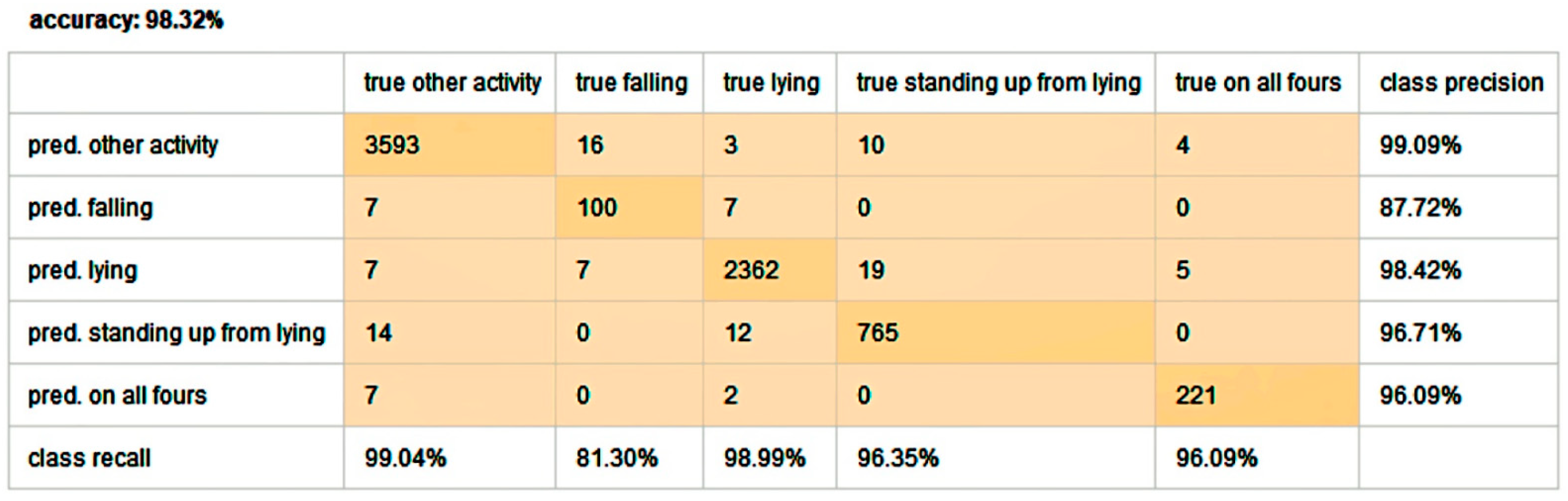
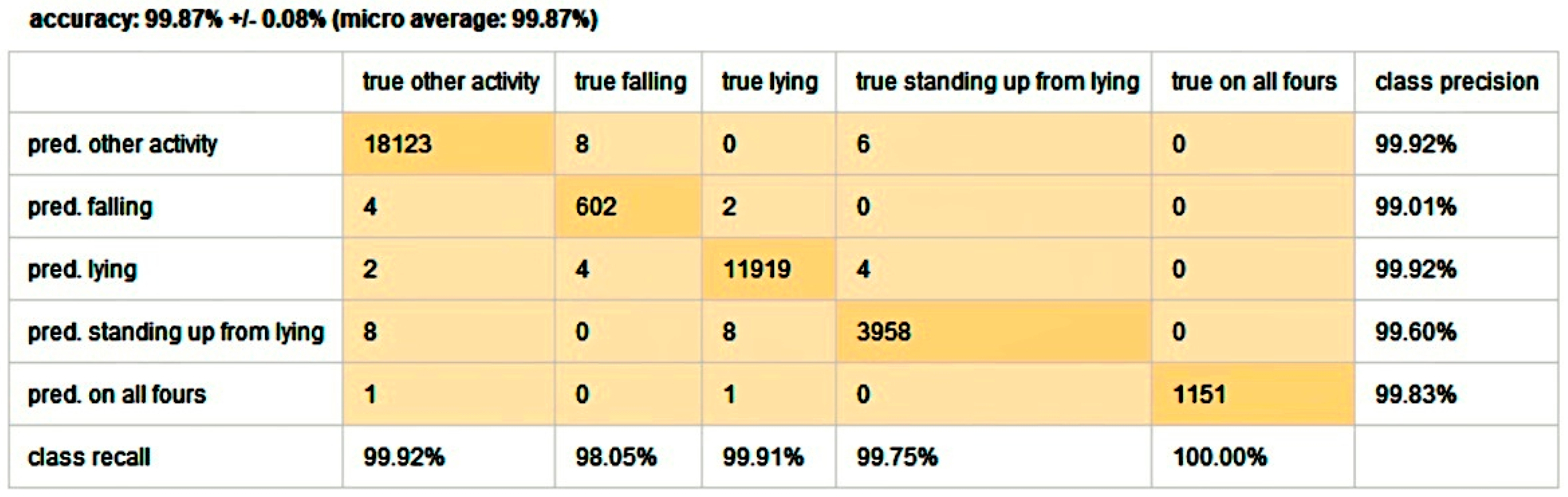
- Most of the recent works in this field, as discussed in Section 2, have been binary classifiers. Such classifiers tend to classify certain fall-like postures, such as being on all fours, as a fall. Such false positives can lead to alert fatigue [44] in caregivers or medical personnel, thereby causing a decline in the quality of care. It is highly necessary that machine learning-based fall detection systems detect falls and accurately detect fall-related motions or similar postures to address this limitation. We have addressed this challenge in this work by proposing an interdisciplinary framework that can recognize postures (Figure 1) and interpret multimodal components of posture and motion-related data (Section 3.1) to train a k-NN-based multilabel machine learning method that can detect falls as well as fall-like motions (Figure 2) by tracking the data coming from an accelerometer placed on the user’s chest, which is the optimal position for an accelerometer to track motions and behavioral data. We tested our approach on a dataset [50] that consisted of 164,860 rows of data collected from five individuals performing different activities, including falls. The results (Figure 3) of this k-NN-based multilabel classifier show that our proposed approach can detect not only falls but also fall-related motions with a high level of accuracy.
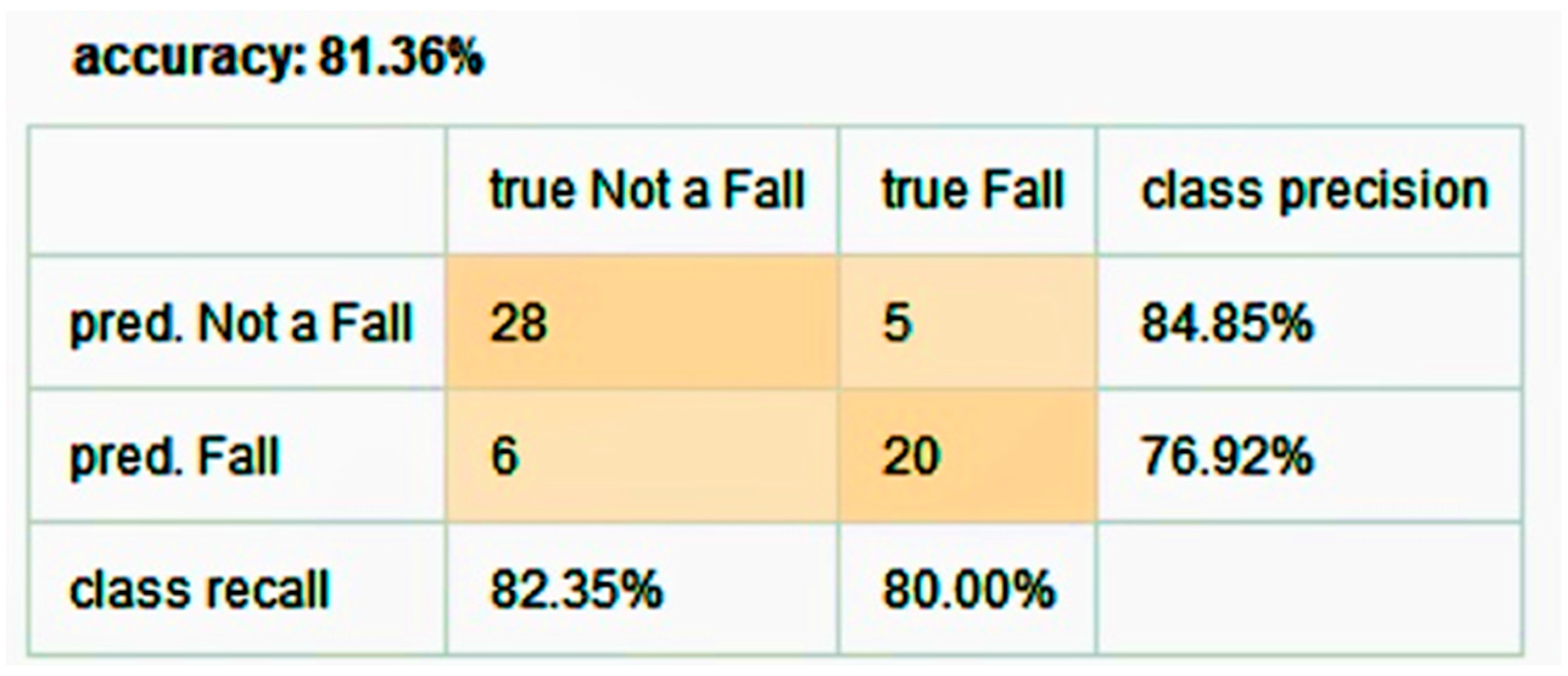
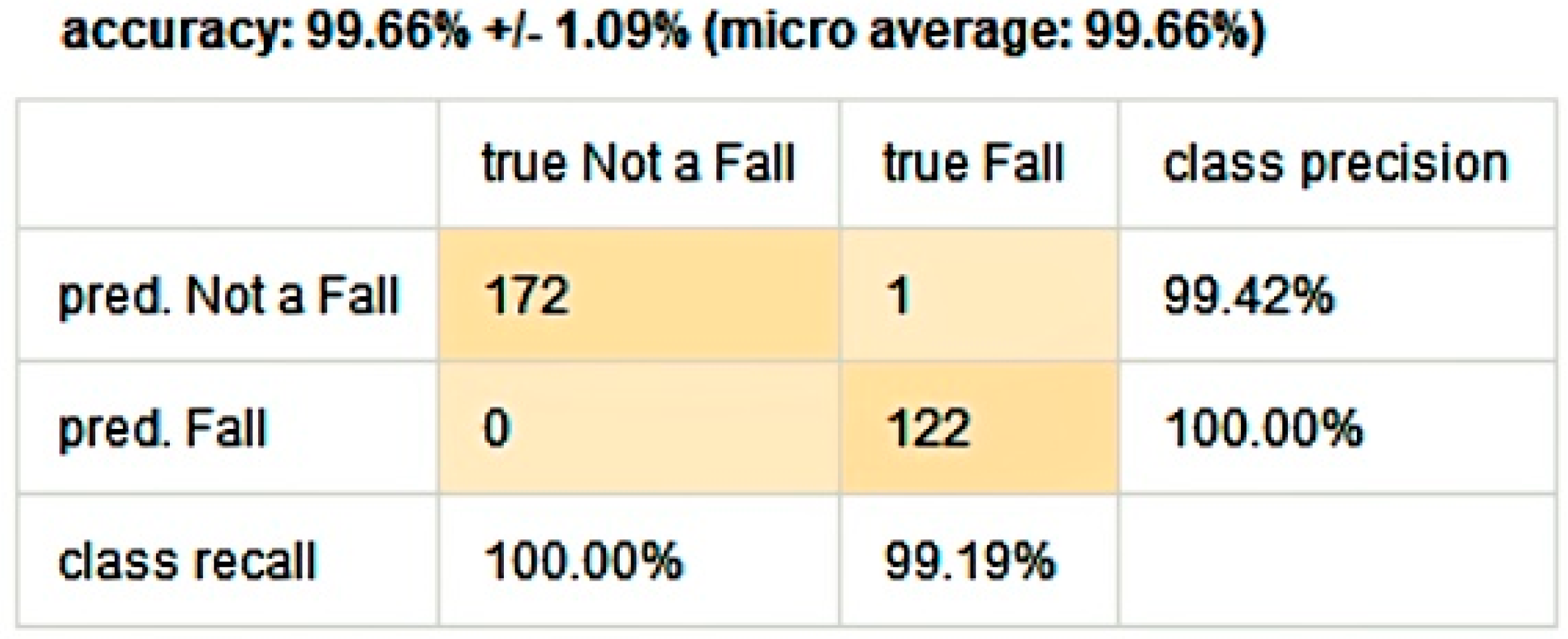
- To address the challenge that fall detections must achieve much higher accuracies for increased trust and user acceptance, we have presented a novel approach (Section 5) to improve the k-NN-based multilabel classifier’s performance for fall detection. We presented this approach for the k-NN-based classifier because the findings of Section 4 (Table 3 and Table 4) show that out of all the machine learning methods, the k-NN approach is best suited for the development of fall detection systems and applications. The methodology for the development of this approach that uses k-folds cross-validation [54] and the AdaBoost algorithm [55,56] with a k-NN-based multilabel classifier with certain defined specifications is presented in Section 5.1. We evaluated this approach on two datasets, and the results presented and discussed in the form of a comparison study (Table 5) show that irrespective of the dataset, this approach for fall detection boosts the performance accuracy of the k-NN classifier and outperforms all prior works [17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43], thereby upholding the potential, relevance, and importance of this methodology.
- To address the need for long lie detection after a fall, which can have minor to major health-related concerns for the elderly, we have proposed a k-NN-based posture and motion recognition approach that can detect the activity of standing up from lying. We tested this approach on a dataset [50], and the results (Figure 3) show that our approach achieves class precision and class recall values of 96.71% and 96.35%, respectively, for detecting the motion of standing up from lying. In addition to this, in Section 5, we have presented a novel methodology to improve the performance accuracy of our learning approach by use of the cross-validation approach [54] and AdaBoost algorithm [55,56]. The results (Figure 7) of this approach show that the class precision and class recall values for the motion of standing up from lying increased to 99.60% and 99.75%, respectively. To implement this approach in a real-time scenario, the temporal information would need to be tracked to detect whether the activity of standing up from lying took place within one hour of the person experiencing a fall.
7. Conclusions and Scope for Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Population Ageing 2019. Available online: https://www.un.org/en/development/desa/population/publications/pdf/ageing/WorldPopulationAgeing2019-Highlights.pdf (accessed on 4 April 2021).
- World Population Ageing: 1950–2050. Available online: http://globalag.igc.org/ruralaging/world/ageingo.htm (accessed on 4 April 2021).
- Nahian, M.J.A.; Ghosh, T.; Banna, M.H.A.; Aseeri, M.A.; Uddin, M.N.; Ahmed, M.R.; Mahmud, M.; Kaiser, M.S. Towards an Accelerometer-Based Elderly Fall Detection System Using Cross-Disciplinary Time Series Features. IEEE Access 2021, 9, 39413–39431. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. An Improved Approach for Complex Activity Recognition in Smart Homes. In Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; pp. 220–231. [Google Scholar]
- Tinetti, M.E. Clinical Practice. Preventing Falls in Elderly Persons. N. Engl. J. Med. 2003, 348, 42–49. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Ellul, J.; Azzopardi, G. Elderly Fall Detection Systems: A Literature Survey. Front. Robot. AI 2020, 7, 71. [Google Scholar] [CrossRef]
- Lezzar, F.; Benmerzoug, D.; Kitouni, I. Camera-Based Fall Detection System for the Elderly with Occlusion Recognition. Appl. Med. Inform. 2020, 42, 169–179. [Google Scholar]
- CDC. Keep on Your Feet—Preventing Older Adult Falls. Available online: https://www.cdc.gov/injury/features/older-adult-falls/index.html (accessed on 4 April 2021).
- The National Council on Aging. Available online: https://www.ncoa.org/news/resources-for-reporters/get-the-facts/falls-prevention-facts/ (accessed on 4 April 2021).
- CDC Important Facts about Falls. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/adultfalls.html (accessed on 4 April 2021).
- Cost of Older Adult Falls. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/data/fallcost.html (accessed on 4 April 2021).
- El-Bendary, N.; Tan, Q.; Pivot, F.C.; Lam, A. Fall Detection and Prevention for the Elderly: A Review of Trends and Challenges. Int. J. Smart Sens. Intell. Syst. 2013, 6, 1230–1266. [Google Scholar] [CrossRef] [Green Version]
- Long Lie. Available online: https://www.physio-pedia.com/Long_Lie (accessed on 5 April 2021).
- Tinetti, M.E.; Liu, W.L.; Claus, E.B. Predictors and Prognosis of Inability to Get Up After Falls Among Elderly Persons. JAMA 1993, 269, 65–70. [Google Scholar] [CrossRef]
- Wild, D.; Nayak, U.S.; Isaacs, B. How Dangerous Are Falls in Old People at Home? Br. Med. J. (Clin. Res. Ed) 1981, 282, 266–268. [Google Scholar] [CrossRef] [Green Version]
- Nick, M.; Becker, M. A Hybrid Approach to Intelligent Living Assistance. In Proceedings of the 7th International Conference on Hybrid Intelligent Systems (HIS 2007), Kaiserslautern, Germany, 17–19 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 283–289. [Google Scholar]
- Liu, C.-L.; Lee, C.-H.; Lin, P.-M. A fall detection system using k-nearest neighbor classifier. Expert Syst. Appl. 2010, 37, 7174–7181. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Chen, L.; Wang, B.; Ji, C.; Tao, S. A Plantar Inclinometer Based Approach to Fall Detection in Open Environments. In Emerging Trends and Advanced Technologies for Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2016; pp. 1–13. [Google Scholar]
- Rafferty, J.; Synnott, J.; Nugent, C.; Morrison, G.; Tamburini, E. Fall Detection through Thermal Vision Sensing. In Ubiquitous Computing and Ambient Intelligence; Springer International Publishing: Cham, Switzerland, 2016; pp. 84–90. [Google Scholar]
- Castillo, J.C.; Carneiro, D.; Serrano-Cuerda, J.; Novais, P.; Fernández-Caballero, A.; Neves, J. A multi-modal approach for activity classification and fall detection. Int. J. Syst. Sci. 2014, 45, 810–824. [Google Scholar] [CrossRef] [Green Version]
- Fu, Z.; Delbruck, T.; Lichtsteiner, P.; Culurciello, E. An Address-Event Fall Detector for Assisted Living Applications. IEEE Trans. Biomed. Circuits Syst. 2008, 2, 88–96. [Google Scholar] [CrossRef] [Green Version]
- Willems, J.; Debard, G.; Vanrumste, B.; Goedemé, T. A Video-Based Algorithm for Elderly Fall Detection. In IFMBE Proceedings; Springer: Berlin/Heidelberg, Germany, 2009; pp. 312–315. [Google Scholar]
- Feng, P.; Yu, M.; Naqvi, S.M.; Chambers, J.A. Deep Learning for Posture Analysis in Fall Detection. In 2014 19th International Conference on Digital Signal Processing; IEEE: Piscataway, NJ, USA, 2014; pp. 12–17. [Google Scholar]
- Jokanovic, B.; Amin, M.; Ahmad, F.; Boashash, B. Radar Fall Detection Using Principal Component Analysis. In Radar Sensor Technology XX; Ranney, K.I., Doerry, A., Eds.; SPIE: Bellingham, WA, USA, 2016. [Google Scholar]
- Bian, Z.-P.; Hou, J.; Chau, L.-P.; Magnenat-Thalmann, N. Fall Detection Based on Body Part Tracking Using a Depth Camera. IEEE J. Biomed. Health Inform. 2015, 19, 430–439. [Google Scholar] [CrossRef]
- Ozcan, K.; Velipasalar, S.; Varshney, P.K. Autonomous Fall Detection with Wearable Cameras by Using Relative Entropy Distance Measure. IEEE Trans. Hum. Mach. Syst. 2016, 47, 1–9. [Google Scholar] [CrossRef]
- Lai, C.-F.; Chang, S.-Y.; Chao, H.-C.; Huang, Y.-M. Detection of Cognitive Injured Body Region Using Multiple Triaxial Accelerometers for Elderly Falling. IEEE Sens. J. 2011, 11, 763–770. [Google Scholar] [CrossRef]
- Hakim, A.; Huq, M.S.; Shanta, S.; Ibrahim, B.S.K.K. Smartphone Based Data Mining for Fall Detection: Analysis and Design. Procedia Comput. Sci. 2017, 105, 46–51. [Google Scholar] [CrossRef]
- Tomii, S.; Ohtsuki, T. Falling Detection Using Multiple Doppler Sensors. In 2012 IEEE 14th International Conference on e-Health Networking, Applications and Services (Healthcom); IEEE: Piscataway, NJ, USA, 2012; pp. 196–201. [Google Scholar]
- Espinosa, R.; Ponce, H.; Gutiérrez, S.; Martínez-Villaseñor, L.; Brieva, J.; Moya-Albor, E. A vision-based approach for fall detection using multiple cameras and convolutional neural networks: A case study using the UP-Fall detection dataset. Comput. Biol. Med. 2019, 115, 103520. [Google Scholar] [CrossRef]
- Nakamura, T.; Bouazizi, M.; Yamamoto, K.; Ohtsuki, T. Wi-Fi-CSI-Based Fall Detection by Spectrogram Analysis with CNN. In GLOBECOM 2020—2020 IEEE Global Communications Conference; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Balli, S.; Sağbaş, E.A.; Peker, M. Human activity recognition from smart watch sensor data using a hybrid of principal component analysis and random forest algorithm. Meas. Control 2019, 52, 37–45. [Google Scholar] [CrossRef] [Green Version]
- Dhole, S.R.; Kashyap, A.; Dangwal, A.N.; Mohan, R. A novel helmet design and implementation for drowsiness and fall detection of workers on-site using EEG and Random-Forest Classifier. Procedia Comput. Sci. 2019, 151, 947–952. [Google Scholar] [CrossRef]
- Ramirez, H.; Velastin, S.A.; Fabregas, E.; Meza, I.; Makris, D.; Farias, G. Fall Detection using Human Skeleton Features. In Proceedings of the 11th International Conference on Pattern Recognition Systems—ICPRS-21, Curico, Chile, 17–19 March 2021. in press. [Google Scholar]
- Tahir, A.; Ahmad, J.; Morison, G.; Larijani, H.; Gibson, R.M.; Skelton, D.A. Hrnn4f: Hybrid Deep Random Neural Network for Multi-Channel Fall Activity Detection. Probab. Eng. Inf. Sci. 2021, 35, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Sarabia-Jácome, D.; Usach, R.; Palau, C.E.; Esteve, M. Highly-efficient fog-based deep learning AAL fall detection system. Internet Things 2020, 11, 100185. [Google Scholar] [CrossRef]
- Dhiraj; Manekar, R.; Saurav, S.; Maiti, S.; Singh, S.; Chaudhury, S.; Neeraj; Kumar, R.; Chaudhary, K. Activity Recognition for Indoor Fall Detection in 360-Degree Videos Using Deep Learning Techniques. In Proceedings of the 3rd International Conference on Computer Vision and Image Processing; Springer: Singapore, 2020; pp. 417–429. [Google Scholar]
- Ngu, A.H.; Tseng, P.-T.; Paliwal, M.; Carpenter, C.; Stipe, W. Smartwatch-Based IoT Fall Detection Application. Open J. Internet Things 2018, 4, 87–98. [Google Scholar]
- Khan, S.; Qamar, R.; Zaheen, R.; Al-Ali, A.R.; Al Nabulsi, A.; Al-Nashash, H. Internet of things based multi-sensor patient fall detection system. Healthc. Technol. Lett. 2019, 6, 132–137. [Google Scholar] [CrossRef]
- Ning, Y.; Zhang, S.; Nie, X.; Li, G.; Zhao, G. Fall Detection Algorithm Based on Gradient Boosting Decision Tree. In 2019 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC); IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Cahoolessur, D.K.; Rajkumarsingh, B. Fall Detection System using XGBoost and IoT. R&D J. 2020, 36, 8–18. [Google Scholar] [CrossRef]
- Cai, W.; Qiu, L.; Li, W.; Yu, J.; Wang, L. Practical Fall Detection Algorithm based on Adaboost. In Proceedings of the 2019 4th International Conference on Biomedical Signal and Image Processing (ICBIP 2019)—ICBIP ‘19; ACM Press: New York, NY, USA, 2019. [Google Scholar]
- Lee, J.-S.; Tseng, H.-H. Development of an Enhanced Threshold-Based Fall Detection System Using Smartphones with Built-In Accelerometers. IEEE Sens. J. 2019, 19, 8293–8302. [Google Scholar] [CrossRef]
- Cash, J.J. Alert fatigue. Am. J. Health Syst. Pharm. 2009, 66, 2098–2101. [Google Scholar] [CrossRef] [PubMed]
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer Placement for Posture Recognition and Fall Detection. In 2011 Seventh International Conference on Intelligent Environments; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Mbient Labs Metamotion C. Available online: https://mbientlab.com/metamotionc/ (accessed on 5 April 2021).
- Chakraborty, S.; Han, C.Y.; Zhou, X.; Wee, W. A Context Driven Human Activity Recognition Framework. In Proceedings of the 2016 International Conference on Health Informatics and Medical Systems, Monte Carlo Resort, Las Vegas, NV, USA, 25–28 July 2016; pp. 96–102. [Google Scholar]
- Axelrod, B. Ohio Gov. Mike DeWine Asks Employers to Continue Working Remotely Amid COVID-19. Available online: https://www.wkyc.com/article/news/health/coronavirus/dewine-woking-remotely-covid-19/95-54447569-e757-4eac-bbc3-4bab4652b764 (accessed on 5 April 2021).
- Kaluža, B.; Mirchevska, V.; Dovgan, E.; Luštrek, M.; Gams, M. An Agent-Based Approach to Care in Independent Living. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 177–186. [Google Scholar]
- Tabbakha, N.E.; Ooi, C.P.; Tan, W.H. A Dataset for Elderly Action Recognition Using Indoor Location and Activity Tracking Data. Mendeley Data. 2020. Available online: https://data.mendeley.com/datasets/sy3kcttdtx/3 (accessed on 13 February 2021).
- Mierswa, I.; Wurst, M.; Klinkenberg, R.; Scholz, M.; Euler, T. YALE: Rapid Prototyping for Complex Data Mining Tasks. In Proceedings of the 12th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining—KDD’06, Philadelphia, PA, USA, 20–23 August 2006; ACM Press: New York, NY, USA, 2006. [Google Scholar]
- Mohammed, M.; Khan, M.B.; Bashier, E.B.M. Machine Learning: Algorithms and Applications; CRC Publishers: Boca Raton, FL, USA, 2016. [Google Scholar] [CrossRef]
- Browne, M.W. Cross-Validation Methods. J. Math. Psychol. 2000, 44, 108–132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schapire, R.E. Explaining AdaBoost. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar]
- Wikipedia Contributors. AdaBoost. Available online: https://en.wikipedia.org/w/index.php?title=AdaBoost&oldid=1015653726 (accessed on 5 April 2021).
- Santos, M.S.; Soares, J.P.; Abreu, P.H.; Araujo, H.; Santos, J. Cross-Validation for Imbalanced Datasets: Avoiding Overoptimistic and Overfitting Approaches [Research Frontier]. IEEE Comput. Intell. Mag. 2018, 13, 59–76. [Google Scholar] [CrossRef]
- Subramanian, J.; Simon, R. Overfitting in Prediction Models—Is It a Problem Only in High Dimensions? Contemp. Clin. Trials 2013, 36, 636–641. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z. Controlling the Overfitting of Heritability in Genomic Selection through Cross Validation. Sci. Rep. 2017, 7, 13678. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lim, C.; Yu, B. Estimation Stability with Cross-Validation (ESCV). J. Comput. Graph. Stat. 2016, 25, 464–492. [Google Scholar] [CrossRef] [Green Version]
- U.S. Department of Health and Human Services; Office for Human Research Protections (OHRP); U.S. Department of Health and Human Services; Food and Drug Administration; Office of Good Clinical Practice (OGCP); Center for Drug Evaluation and Research (CDER); Center for Biologics Evaluation and Research (CBER); Center for Devices and Radiological Health (CDRH); Office of Regulatory Affairs (ORA). Institutional Review Board (IRB) Written Procedures: Guidance for Institutions and IRBs, Fda.gov. 2018. Available online: https://www.fda.gov/media/99271/download (accessed on 19 June 2021).
- U.S. Food & Drug Administration. CFR—Code of Federal Regulations Title 21. 2020. Available online: https://www.accessdata.fda.gov/scripts/cdrh/cfdocs/cfcfr/CFRSearch.cfm?CFRPart=820&showFR=1 (accessed on 19 June 2021).
- ISO 14971:2019, Medical Devices—Application of Risk Management to Medical Devices, Iso.org. 2019. Available online: https://www.iso.org/standard/72704.html (accessed on 19 June 2021).
- Coronato, A.; Cuzzocrea, A. An Innovative Risk Assessment Methodology for Medical Information Systems. IEEE Trans. Knowl. Data Eng. 2020. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Data | Use of Wearables | Use of Non-Wearables |
|---|---|---|---|
| Liu et al. [17] | Human body silhouette bounding box dimensions | - | ✓ |
| Sun et al. [18] | Angle variations from inclinometer recordings | - | ✓ |
| Rafferty et al. [19] | Thermal vision sensing | - | ✓ |
| Castillo et al. [20] | Video feed and accelerometer data | ✓ | ✓ |
| Fu et al. [21] | Behavior and posture data | - | ✓ |
| Williams et al. [22] | Grayscale video | - | ✓ |
| Feng et al. [23] | Postural orientations | - | ✓ |
| Jokanovic et al. [24] | Eigen images during motion | - | ✓ |
| Bian et al. [25] | Depth cameras and the associated RGB information | - | ✓ |
| Ozcan et al. [26] | Video data from a movable camera | ✓ | ✓ |
| Lai et al. [27] | Triaxial accelerometers | ✓ | - |
| Hakim et al. [28] | Inertial measurement unit (IMU) of the user’s phone | ✓ | - |
| Tomii et al. [29] | Doppler sensor data | - | ✓ |
| Espinosa et al. [30] | Data from multiple cameras | - | ✓ |
| Nakamura et al. [31] | Spectrogram images and Wi-Fi CSI data | - | ✓ |
| Balli et al. [32] | Activity and movement data from a smartwatch | ✓ | - |
| Dhole et al. [33] | EEG data | ✓ | |
| Ramirez et al. [34] | Analysis of images of different postures | - | ✓ |
| Ahmad et al. [35] | Accelerometer data | ✓ | - |
| Jácome et al. [36] | Data from resource-constrained devices (fog nodes) | ✓ | - |
| Dhiraj et al. [37] | 360-degree video data | - | ✓ |
| Ngu et al. [38] | Smartwatch activity data | ✓ | |
| Khan et al. [39] | Camera, gyroscope, and accelerometer data | ✓ | ✓ |
| Ning et al. [40] | Human behavior and posture data | ✓ | - |
| Cahoolessur et al. [41] | Human behavior data | ✓ | - |
| Cai et al. [42] | Three-axis acceleration, three-axis angular acceleration | ✓ | - |
| Lee et al. [43] | Acceleration data collected from a smartphone, GPS data, and WiFi signals | ✓ | - |
| Learning Approach | Work (s) |
|---|---|
| Random forest | Balli et al. [32], Dhole et al. [33] |
| Artificial neural network | Espinosa et al. [30], Nakamura et al. [31], Tahir et al. [35] |
| Decision tree | Ozcan et al. [26], Lai et al. [27], Cai et al. [42] |
| Support vector machine | Bian et al. [25], Hakim et al. [28] |
| k-NN | Liu et al. [17] |
| Gradient boosted trees | Ning et al. [40], Cahoolessur et al. [41] |
| Deep learning | Feng et al. [23], Jácome et al. [36] |
| Naïve Bayes | Ngu et al. [38], Khan et al. [39] |
| Learning Approach | Overall Accuracy | Precision (Falling) | Precision (Lying) | Precision (Standing Up from Lying) | Precision (On All Fours) | Precision (Other Activity) |
|---|---|---|---|---|---|---|
| Random forest | 81.97% | 66.67% | 80.17% | 90.00% | 100.00% | 83.12% |
| Artificial neural network | 86.33% | 14.29% | 87.24% | 71.12% | 75.29% | 87.99% |
| Decision tree | 81.87% | 50.00% | 80.51% | 50.66% | 76.92% | 84.60% |
| Multiway decision tree | 83.12% | 0.00% | 83.36% | 63.34% | 49.32% | 85.90% |
| Support vector machine | 76.50% | 0.00% | 67.34% | 0.00% | 0.00% | 84.45% |
| k-NN | 98.32% | 87.72% | 98.42% | 96.71% | 96.09% | 99.09% |
| Gradient boosted trees | 84.95% | 0.00% | 84.52% | 67.20% | 51.24% | 88.61% |
| ID3 | 68.89% | 0.00% | 66.47% | 66.47% | 59.55% | 70.39% |
| Decision stump | 50.96% | 0.00% | 44.36% | 0.00% | 0.00% | 51.20% |
| CHAID | 68.87% | 0.00% | 66.44% | 60.00% | 59.55% | 70.39% |
| AutoMLP | 86.30% | 30.43% | 85.23% | 70.72% | 52.75% | 91.45% |
| Linear regression | 77.80% | 0.00% | 71.56% | 0.00% | 0.00% | 82.58% |
| Vector linear regression | 50.66% | 0.00% | 0.00% | 0.00% | 0.00% | 50.66% |
| Random tree | 77.29% | 0.00% | 76.04% | 0.00% | 0.00% | 78.10% |
| Naïve Bayes | 27.23% | 5.69% | 69.85% | 12.95% | 5.53% | 0.00% |
| Naïve Bayes (kernel) | 80.28% | 4.00% | 80.90% | 47.87% | 23.97% | 85.08% |
| Linear discriminant analysis | 50.66% | 0.00% | 0.00% | 0.00% | 0.00% | 50.66% |
| Quadratic discriminant analysis | 50.66% | 0.00% | 0.00% | 0.00% | 0.00% | 50.66% |
| Deep learning | 82.13% | 33.33% | 79.23% | 56.75% | 61.11% | 86.61% |
| Learning Approach | Overall Accuracy | Precision (Fall) | Precision (Not a Fall) |
|---|---|---|---|
| Random forest | 71.19% | 60.53% | 90.48% |
| Artificial neural network | 66.10% | 66.67% | 64.71% |
| Decision tree | 74.58% | 62.50% | 100.00% |
| Multiway decision tree | 74.58% | 62.50% | 100.00% |
| Support vector machine | 66.10% | 66.67% | 64.71% |
| k-NN | 81.36% | 76.92% | 84.85% |
| Gradient boosted trees | 74.58% | 67.86% | 80.65% |
| ID3 | 57.63% | 0.00% | 57.63% |
| Decision stump | 74.58% | 62.50% | 100.00% |
| CHAID | 57.63% | 0.00% | 57.63% |
| AutoMLP | 66.10% | 64.71% | 66.67% |
| Linear regression | 66.10% | 64.71% | 66.67% |
| Vector linear regression | 57.63% | 0.00% | 57.63% |
| Random tree | 74.58% | 62.50% | 100.00% |
| Naïve Bayes | 66.10% | 64.71% | 66.67% |
| Naïve Bayes (kernel) | 71.19% | 66.67% | 74.29% |
| Linear discriminant analysis | 66.10% | 64.71% | 66.67% |
| Quadratic discriminant analysis | 74.58% | 62.50% | 100.00% |
| Deep learning | 74.58% | 62.50% | 100.00% |
| Work(s) | Performance Accuracy |
|---|---|
| Liu et al. [17] | 84.44% |
| Sun et al. [18] | 85.40% |
| Rafferty et al. [19] | 68.00% |
| Castillo et al. [20] | 79.57% |
| Fu et al. [21] | 84.00% |
| Williams et al. [22] | 80.00% |
| Feng et al. [23] | 81.70% |
| Jokanovic et al. [24] | 83.00% |
| Bian et al. [25] | 97.60% |
| Ozcan et al. [26] | 89.80% |
| Lai et al. [27] | 92.92% |
| Hakim et al. [28] | 90.00% |
| Tomii et al. [29] | 93.30% |
| Espinosa et al. [30] | 95.64% |
| Nakamura et al. [31] | 90.00% |
| Balli et al. [32] | 98.50% |
| Dhole et al. [33] | 98.00% |
| Ramirez et al. [34] | 98.84% |
| Ahmad et al. [35] | 92.33% |
| Jácome et al. [36] | 98.75% |
| Dhiraj et al. [37] | 90.00% |
| Ngu et al. [38] | 92.33% |
| Khan et al. [39] | 95.00% |
| Ning et al. [40] | 96.00% |
| Cahoolessur et al. [41] | 96.00% |
| Cai et al. [42] | 99.08% |
| Lee et al. [43] | 96.00% |
| Thakur et al. [this work]—dataset 1 | 99.87% |
| Thakur et al. [this work]—dataset 2 | 99.66% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thakur, N.; Han, C.Y. A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method. J. Sens. Actuator Netw. 2021, 10, 39. https://doi.org/10.3390/jsan10030039
Thakur N, Han CY. A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method. Journal of Sensor and Actuator Networks. 2021; 10(3):39. https://doi.org/10.3390/jsan10030039
Chicago/Turabian StyleThakur, Nirmalya, and Chia Y. Han. 2021. "A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method" Journal of Sensor and Actuator Networks 10, no. 3: 39. https://doi.org/10.3390/jsan10030039
APA StyleThakur, N., & Han, C. Y. (2021). A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method. Journal of Sensor and Actuator Networks, 10(3), 39. https://doi.org/10.3390/jsan10030039