
Availability of Services in Wireless Sensor Network with Aerial Base Station Placement


Abstract
:1. Introduction
- Agriculture. In precision agriculture, the ABSP architecture can be utilized for monitoring soil conditions, crop health, and growth. The ground sensors can collect data on soil moisture, temperature, and nutrient levels, and the UAVs can gather information on plant health through aerial imagery. The UAVs can then transmit this data to the base station and cloud processing center for further analysis, allowing farmers to optimize irrigation, fertilization, and pest control strategies.
- Environmental monitoring. The ABSP architecture can be used to monitor air quality, water pollution, and wildlife habitats. Ground sensors can collect data on air pollutants, water quality indicators, and wildlife movement patterns, and UAVs can provide aerial imagery and additional environmental data. By transmitting this information to the base station and cloud processing center, authorities and researchers can analyze the data and develop strategies for environmental conservation and pollution control.
- Disaster management. In the event of natural disasters such as floods, wildfires, or earthquakes, the ABSP architecture can help in rapid response and damage assessment. Ground sensors can collect data on the affected areas, and UAVs can provide real-time aerial imagery and assess the extent of the damage. This information can be sent to the base station and cloud processing center for processing, enabling authorities to make informed decisions about rescue and relief operations.
- Infrastructure monitoring. The proposed architecture can be employed to monitor the structural health of bridges, roads, railways, and other critical infrastructure. Ground sensors can measure vibrations, strain, and temperature, and UAVs can inspect these structures visually and through various imaging techniques. The gathered data can be transmitted to the base station and cloud processing center for analysis, allowing maintenance teams to detect and address potential issues before they become critical.
- Border security and surveillance. In border security applications, the ABSP architecture can help monitor and detect unauthorized activity along borders. Ground sensors can detect motion, sound, and other indicators of human presence, and UAVs can provide aerial surveillance and tracking. The data collected by the sensors and UAVs can be transmitted to the base station and cloud processing center for real-time analysis, enabling security forces to respond quickly to potential threats.
2. Related Works
3. Materials and Methods
- Develop a multi-tier WSN architecture incorporating UAVs for data collection, transmission, and processing, considering the real-world constraints of UAV operation.
- Analyze the availability of sensor services in different ABSP system configurations, considering ground sensors, UAVs, and ground base stations with cloud processing and analysis capabilities.
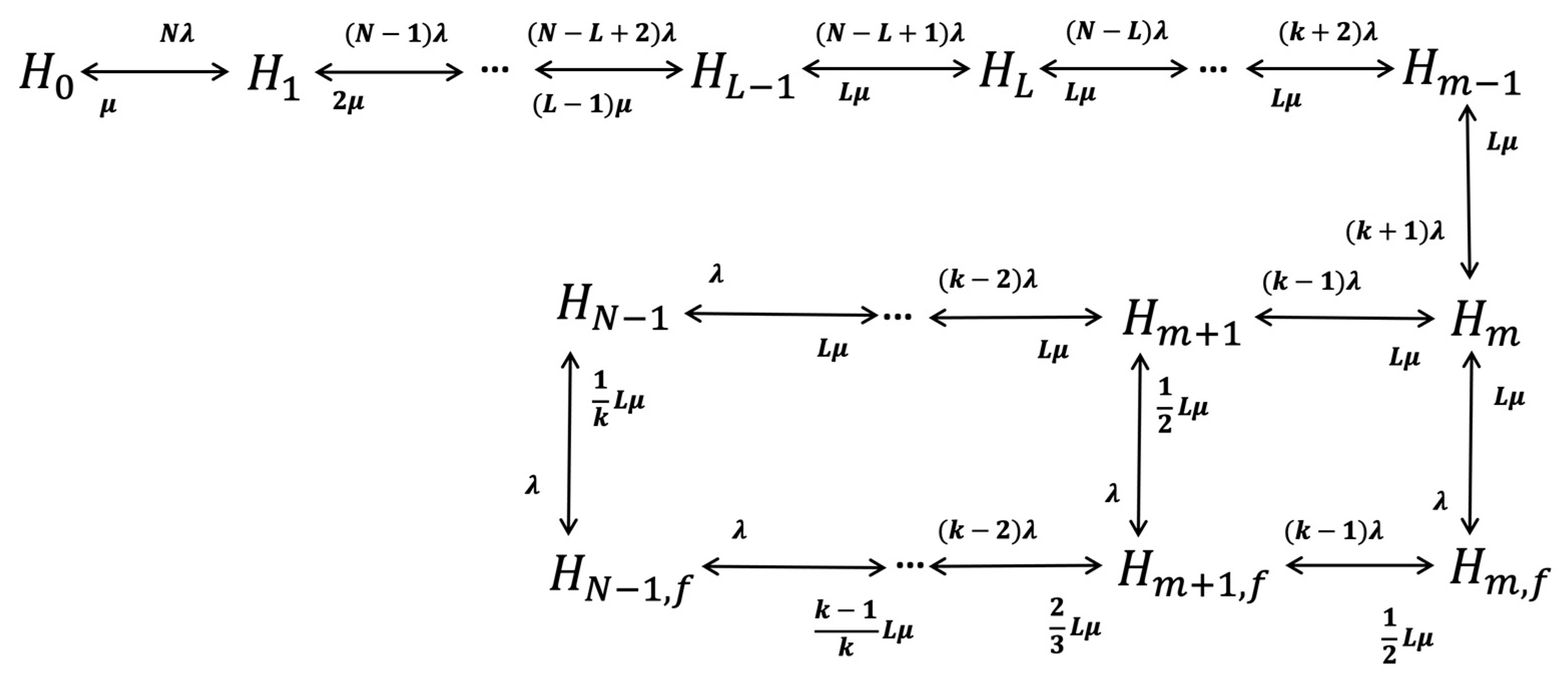
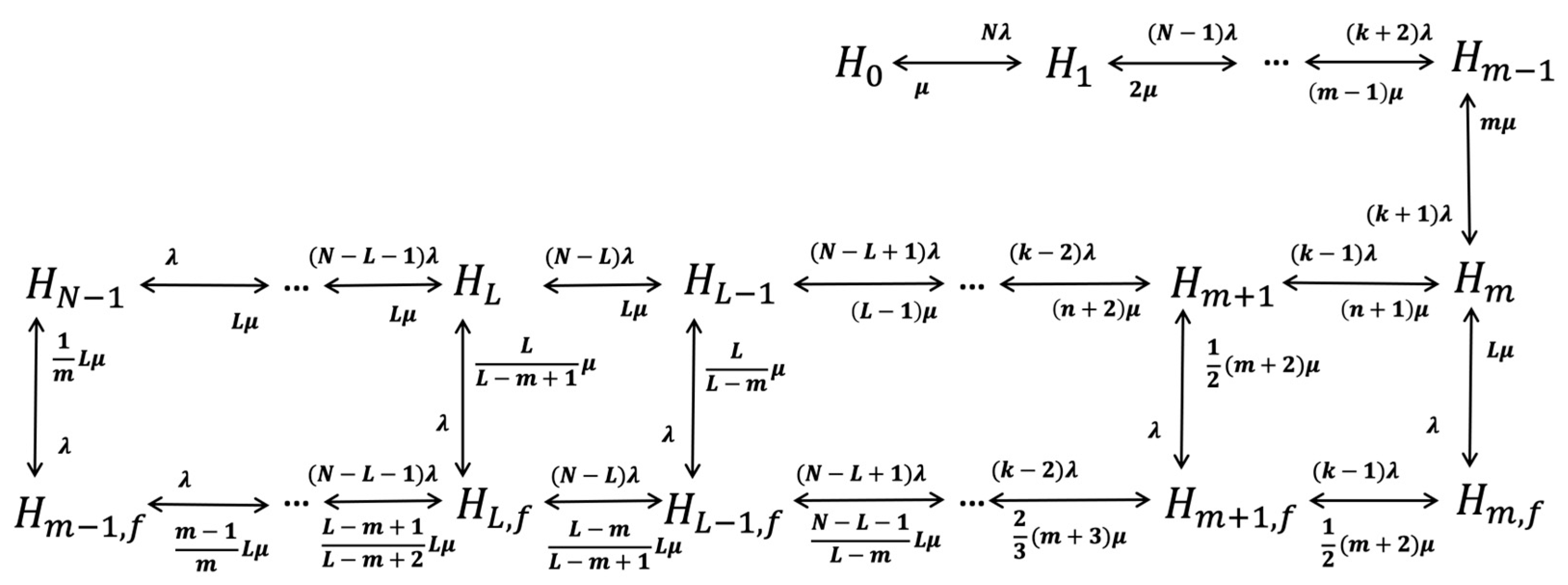
- Propose a model to calculate the availability of dedicated sensor services provided by UAVs in the ABSP system based on Markov chain analysis.
4. Results
5. Discussion
- Disaster management: In the event of a natural disaster, such as an earthquake or hurricane, communication networks can be disrupted or destroyed. UAVs equipped with communication equipment can be deployed as aerial base stations to restore communication networks and provide first responders with crucial information.
- Precision agriculture: UAVs can be used to collect data on crop health, soil moisture, and other environmental factors. With the help of ABSP, the collected data can be transmitted to a central server, where it can be analyzed and used to make informed decisions regarding crop management.
- Surveillance and security: UAVs equipped with cameras and other sensors can be used for surveillance and security purposes, such as monitoring borders, critical infrastructure, and public events. ABSP can be used to provide a reliable and secure communication link between the UAVs and the ground station, enabling real-time video transmission and control of the UAVs.
- Search and rescue: UAVs equipped with thermal imaging cameras and other sensors can be used to search for missing persons in remote or dangerous locations. ABSP can be used to provide a communication link between the UAVs and the ground station, enabling real-time transmission of data and control of the UAVs.
- Environmental monitoring: UAVs can be used to collect data on air quality, water quality, and other environmental factors. ABSP can be used to provide a communication link between the UAVs and the ground station, enabling real-time transmission of data and control of the UAVs.
- Security. This article does not address the security challenges associated with the deployment of UAVs in wireless sensor networks. As these networks become more widespread, they may become more susceptible to cyberattacks or malicious interference. Ensuring the security and privacy of data transmitted between sensors, UAVs, and the cloud is crucial for the successful implementation of these models.
- Environmental factors. The impact of environmental factors, such as weather conditions, terrain, and signal interference, on the performance of UAVs and ground sensors is not considered in the models. These factors can significantly affect the efficiency, reliability, and availability of the wireless sensor network, and thus, they should be taken into account when implementing the proposed architectures.
- Energy management. Although the models consider the limited flight time of UAVs and propose a fleet of additional UAVs for maintaining the availability of communication channels, the overall energy efficiency of the system is not thoroughly addressed. Further research is needed to optimize the energy consumption of UAVs and ground sensors as well as to develop more energy-efficient communication protocols for the proposed architectures.
- Cost-effectiveness. The deployment of multiple UAVs and ground recovery points can be expensive, especially for large-scale wireless sensor networks. A more in-depth cost–benefit analysis is necessary to determine the practicality and cost-effectiveness of implementing the proposed models in real-world applications.
- Regulatory and legal concerns. The operation of UAVs is subject to various regulations and legal restrictions, which can vary depending on the country or region. These limitations can impact the feasibility of the proposed architectures and should be considered during the design and implementation stages.
- Create realistic UAV models that account for factors such as battery life, flight dynamics, and communication constraints.
- Investigate security aspects of the proposed architecture, including data encryption, authentication, and intrusion detection mechanisms.
- Evaluate the scalability of the proposed architecture for large-scale networks and its performance under high node density conditions.
- Explore adaptive clustering algorithms that can dynamically adjust cluster size and structure based on network conditions and requirements.
- Investigate the integration of advanced communication technologies, such as 5G and 6G, to further enhance the performance of WSNs.
6. Conclusions
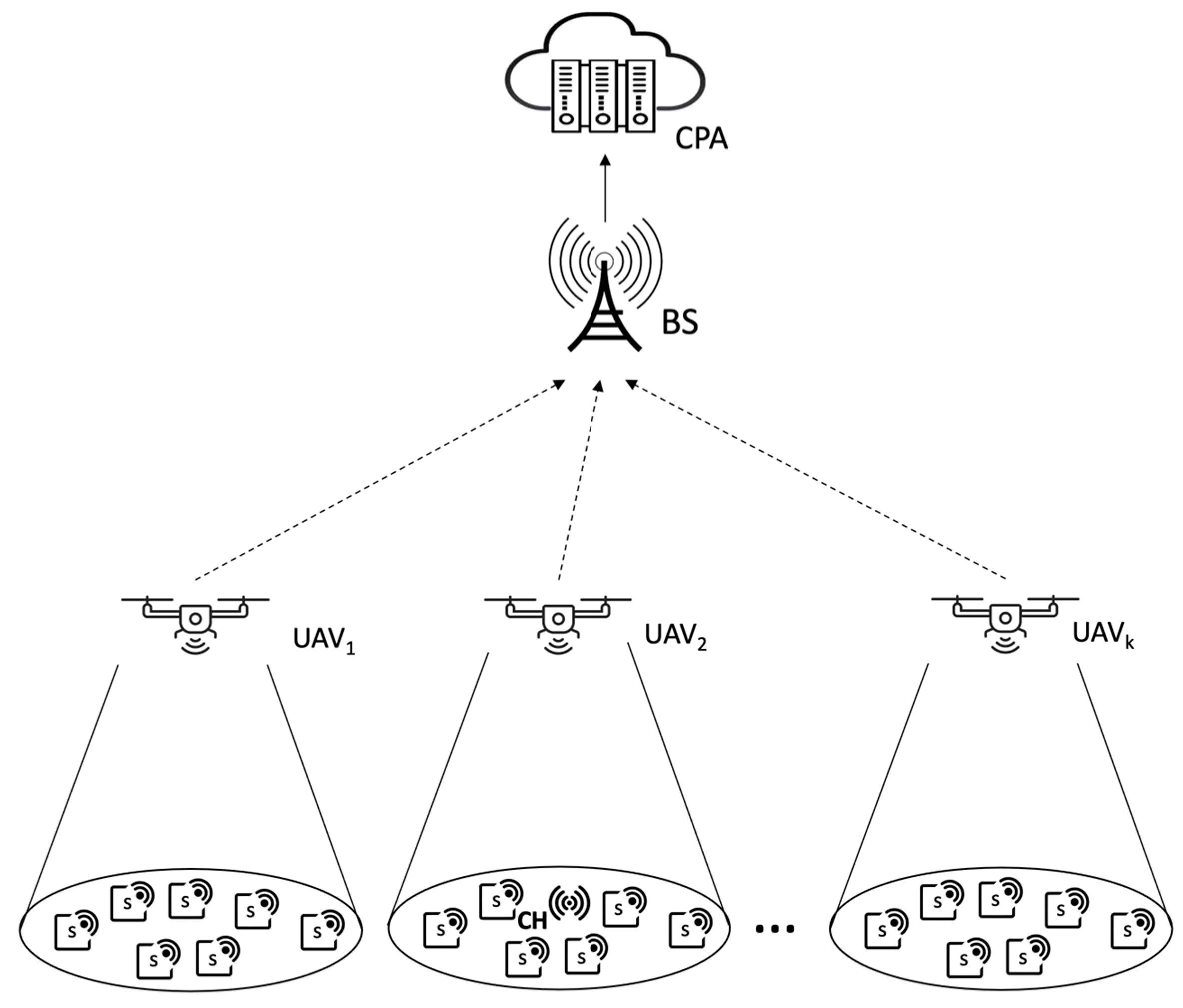
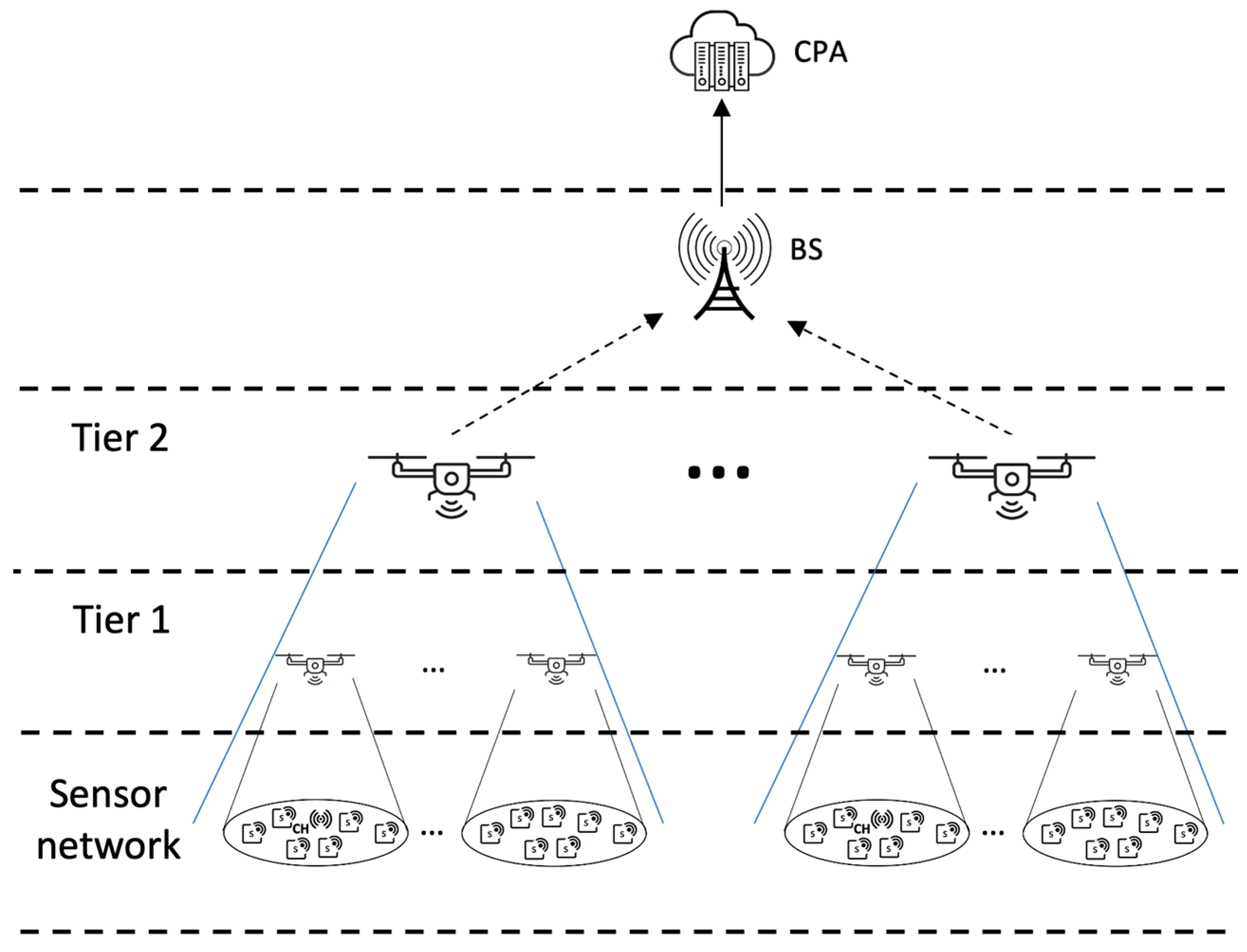
- The availability model of multi-tier WSN architecture is proposed, which integrates ground sensors, UAVs, and a ground base station with cloud processing and analysis. This architecture is particularly suited for applications in cyber-physical systems (CPS) and the Internet of Things (IoT).
- The comprehensive model for analyzing the availability of sensor services in this ABSP architecture is presented. The model takes into account various factors, such as the availability of end-to-end information channels, the dependability of equipment, and the reliability of cloud services.
- Two different configurations of ABSP systems were examined, one with a limited number of ground recovery points and another with a larger number of ground recovery points. The availability of the DSS in each configuration was assessed using Markov chain models.
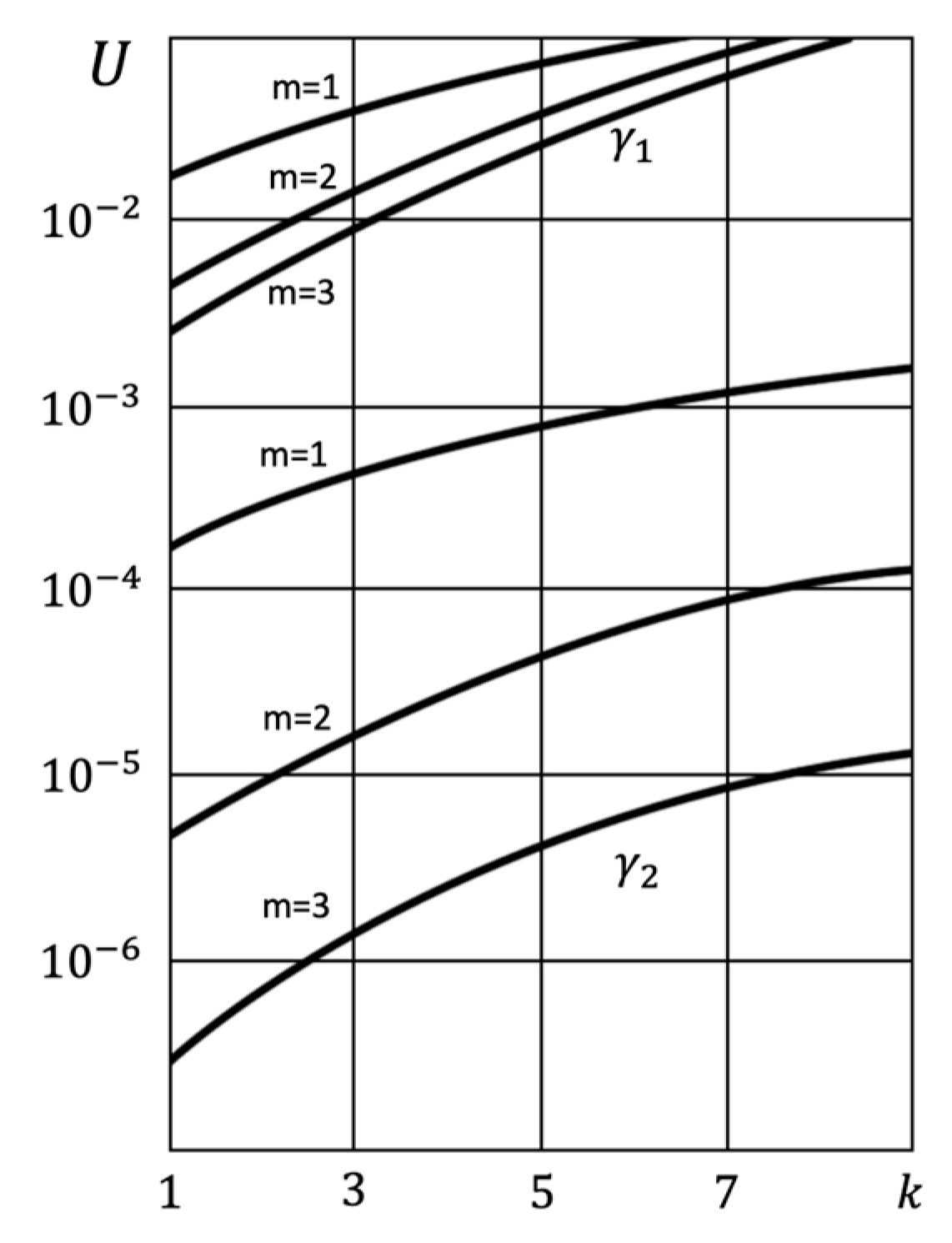
- The effect of the number of UAVs, their reliability parameters, and the number of UAV levels on the availability of the DSS in the ABSP system were analyzed. This analysis provides valuable insights for designing more efficient WSNs with UAV support.
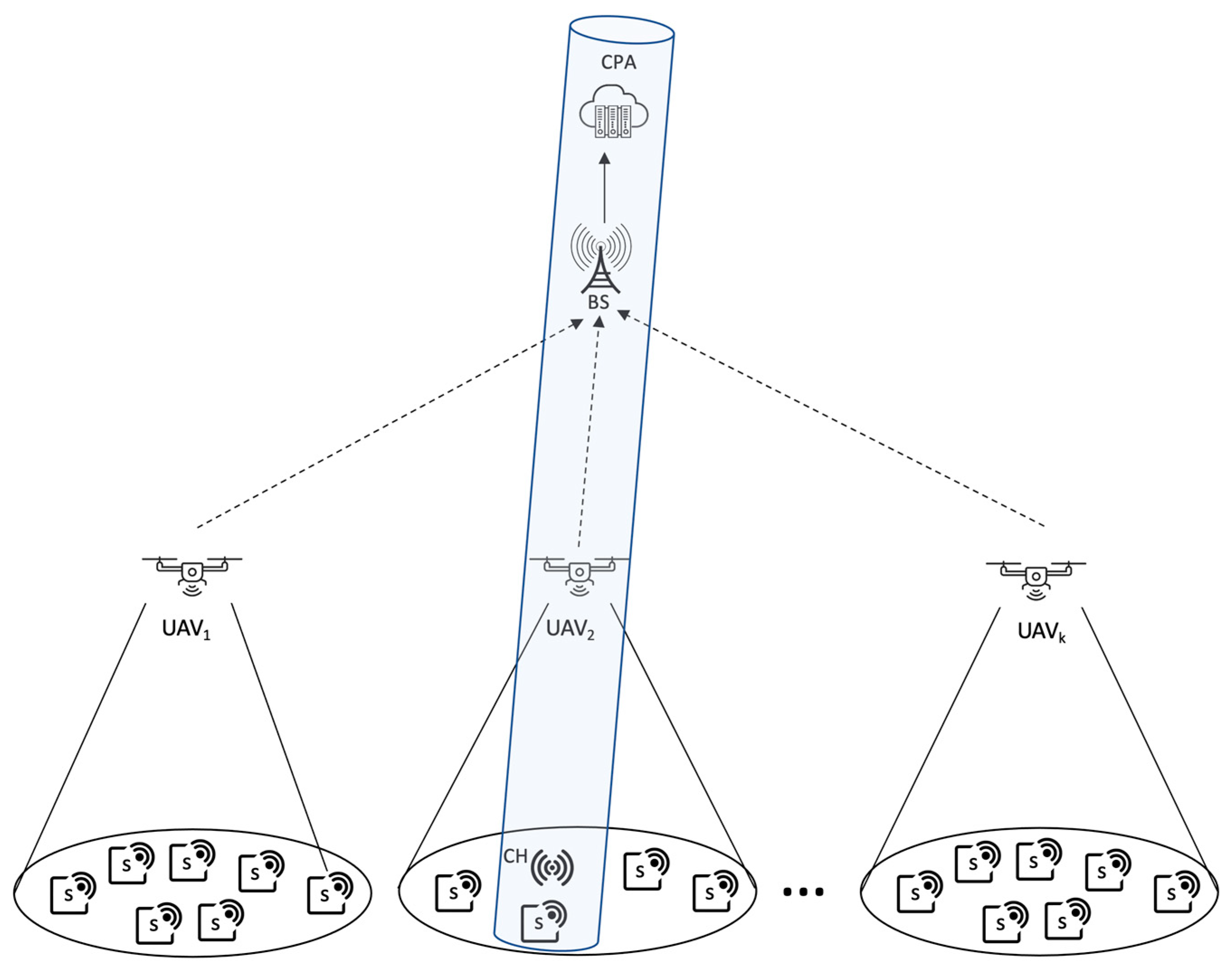
- The hierarchical ABSP architecture for fog computing has been proposed, which consists of multiple levels of UAV swarms. This architecture has the potential to enhance the performance and intelligence of the entire system by filtering and extracting valuable data at each UAV tier.
Funding
Conflicts of Interest
References
- Pottie, G.J. Wireless integrated network sensors (WINS): The web gets physical. In Frontiers of Engineering: Reports on Leading-Edge Engineering from the 2001 NAE Symposium on Frontiers of Engineering; National Academies Press: Washington, DC, USA, 2002; Volume 78. [Google Scholar]
- Hussain, R.; Sahgal, J.; Mishra, P.; Sharma, B. Application of WSN in rural development, agriculture water management. Int. J. Soft Comput. Eng. 2012, 2, 68–72. [Google Scholar]
- Khanafer, M.; Guennoun, M.; Mouftah, H.T. WSN architectures for intelligent transportation systems. In Proceedings of the 2009 3rd International Conference on New Technologies, Mobility and Security, Cairo, Egypt, 20–23 December 2009; pp. 1–8. [Google Scholar]
- Nguyen, M.T.; La, H.M.; Teague, K.A. Compressive and collaborative mobile sensing for scalar field mapping in robotic networks. In Proceedings of the 2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 29 September–2 October 2015; pp. 873–880. [Google Scholar]
- Chen, T.C.; Chen, T.S.; Wu, P.W. On data collection using mobile robot in wireless sensor networks. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2011, 41, 1213–1224. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Random sampling in collaborative and distributed mobile sensor networks utilizing compressive sensing for scalar field mapping. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 1–6. [Google Scholar]
- Nguyen, M.T.; Teague, K.A. Compressive and cooperative sensing in distributed mobile sensor networks. In Proceedings of the MILCOM 2015-2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 1033–1038. [Google Scholar]
- Paz, E.B.O.; Zacharatou, E.T.; Markl, V. Towards Resilient Data Management for the Internet of Moving Things. In BTW 2021; Gesellschaft für Informatik: Bonn, Germany, 2021; pp. 279–301. [Google Scholar]
- Viet, P.Q.; Romero, D. Aerial Base Station Placement: A Tutorial Introduction. IEEE Commun. Mag. 2022, 60, 44–49. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, H.; Ma, Z.; Yang, Y.; Wan, X. Study of UAV Application in Wireless Sensor Networks. In Proceedings of the 2020 3rd International Conference on Mechanical, Electronics, Computer, and Industrial Technology (MECnIT), Medan, Indonesia, 25–27 June 2020; pp. 343–348. [Google Scholar]
- Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Pakrooh, R.; Bohlooli, A.A. A Survey on Unmanned Aerial Vehicles-Assisted Internet of Things: A Service-Oriented Classification. Wirel. Pers. Commun. 2021, 119, 1541–1575. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Efficient Data Collection and Tracking with Flying Drones. Ad. Hoc. Netw. 2019, 89, 35–46. [Google Scholar] [CrossRef]
- Majeed, S.; Sohail, A.; Qureshi, K.N.; Iqbal, S.; Javed, I.T.; Crespi, N.; Nagmeldin, W.; Abdelmaboud, A. Coverage Area Decision Model by Using Unmanned Aerial Vehicles Base Stations for Ad Hoc Networks. Sensors 2022, 22, 6130. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for Energy-Efficient Internet of Things Communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Al-Ahmed, S.A.; Shakir, M.Z.; Zaidi, S.A.R. Optimal 3D UAV Base Station Placement by Considering Autonomous Coverage Hole Detection, Wireless Backhaul and User Demand. J. Commun. Netw. 2020, 22, 467–475. [Google Scholar] [CrossRef]
- Safwat, N.E.-D.; Hafez, I.M.; Newagy, F. 3D Placement of a New Tethered UAV to UAV Relay System for Coverage Maximization. Electronics 2022, 11, 385. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D Placement of an Aerial Base Station in Next Generation Cellular Networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 23–27 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Rolly, R.M.; Malarvezhi, P.; Lagkas, T.D. Unmanned aerial vehicles: Applications, techniques, and challenges as aerial base stations. Int. J. Distrib. Sens. Netw. 2022, 18, 9. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- O’Connor, D.T.P.; Patrick, A.K. Practical Reliability Engineering; Wiley: Chichester, UK, 2012. [Google Scholar]
- Bauer, E.; Adams, R. Reliability and Availability of Cloud Computing; Wiley-IEEE Press: Hoboken, NJ, USA, 2012. [Google Scholar]
- Federal Aviation Administration. Handbook: Reliability, Maintainability, and Availability (RMA) Handbook; FAA-HDBK-006A, January 7; Federal Aviation Administration: Washington, DC, USA, 2008. [Google Scholar]
- Kozlov, B.; Ushakov, I. Reliability Handbook; Holt, Rinehart & Winston: Montreal, QC, Canada, 1970. [Google Scholar]
- Rubino, G.; Sericola, B. Markov Chains and Dependability Theory; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Darwish, S.J.; Bakar, K.A. Fog Based Intelligent Transportation Big Data Analytics in The IoV Environment. IEEE Access 2018, 6, 15679–15701. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Maunder, R.G.; Hanzo, L. Taking drones to the next level: Cooperative distributed unmanned-aerial-vehicular networks for small and mini drones. IEEE Veh. Technol. Mag. 2017, 12, 73–82. [Google Scholar] [CrossRef]
- Ponda, S.S.; Johnson, L.B.; Geramifard, A.; How, J.P. Cooperative mission planning for multi-UAV teams. In Handbook of Unmanned Aerial Vehicles; Springer: New York, NY, USA, 2015; pp. 1447–1490. [Google Scholar]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.-K. UAV-assisted emergency networks in disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef]
- Bujari, A.; Palazzi, C.E.; Ronzani, D. FANET Application Scenarios and Mobility Models. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications (DroNet ‘17), Niagara Falls, NY, USA, 23 June 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 43–46. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, H.; Li, J.; Xu, W.; Zhang, N.; Shen, X. Drone assisted vehicular networks: Architecture, challenges and opportunities. IEEE Netw. 2018, 32, 130–137. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technology to Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed]
- Almuhaya, M.A.M.; Jabbar, W.A.; Sulaiman, N.; Abdulmalek, S. A Survey on LoRaWAN Technology: Recent Trends, Opportunities, Simulation Tools and Future Directions. Electronics 2022, 11, 164. [Google Scholar] [CrossRef]
- Paredes, W.D.; Kaushal, H.; Vakilinia, I.; Prodanoff, Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors 2023, 23, 2403. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Parameters |
|---|---|
| Stationary probability of the state Hi | |
| Availability of end-to-end information channel from sensor to cloud processing | |
| Unavailability of end-to-end information channel from sensor to cloud processing | |
| Availability of service provided by the base station and cloud | |
| Availability of WSN information service at ABSP level | |
| Availability of information services provided by cluster sensor | |
| Availability of information services provided by sensor | |
| Availability of data services provided by cluster head | |
| Failure rate of UAV service | |
| Repair rate of UAV service | |
| UAV reliability parameter 1 | |
| UAV reliability parameter 2 | |
| MTBF | Mean Time Between Failures |
| MTTR | Mean Time to Repair |
| Number of UAVs in ABSP system | |
| Number of additional UAVs in backup fleet | |
| Number of UAVs in ABSP system | |
| Number of repair places in ground recovery center |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kabashkin, I. Availability of Services in Wireless Sensor Network with Aerial Base Station Placement. J. Sens. Actuator Netw. 2023, 12, 39. https://doi.org/10.3390/jsan12030039
Kabashkin I. Availability of Services in Wireless Sensor Network with Aerial Base Station Placement. Journal of Sensor and Actuator Networks. 2023; 12(3):39. https://doi.org/10.3390/jsan12030039
Chicago/Turabian StyleKabashkin, Igor. 2023. "Availability of Services in Wireless Sensor Network with Aerial Base Station Placement" Journal of Sensor and Actuator Networks 12, no. 3: 39. https://doi.org/10.3390/jsan12030039
APA StyleKabashkin, I. (2023). Availability of Services in Wireless Sensor Network with Aerial Base Station Placement. Journal of Sensor and Actuator Networks, 12(3), 39. https://doi.org/10.3390/jsan12030039