


Applying an Adaptive Neuro-Fuzzy Inference System to Path Loss Prediction in a Ruby Mango Plantation

Abstract
:1. Introduction
- An accurate semi-deterministic path loss prediction for a uniform Ruby mango plantation with an ANFIS engine, which consists of two inputs, namely, the distance between the transceivers of WSN nodes and vegetation height together, and an output of path loss prediction.
- The validation of the model using RMSE, MAE, and MAPE against benchmark models.
2. Related Path Loss Models
2.1. ITU-R Model
2.2. COST 235 Model
2.3. FITU-R Model
2.4. Log-Distance Model
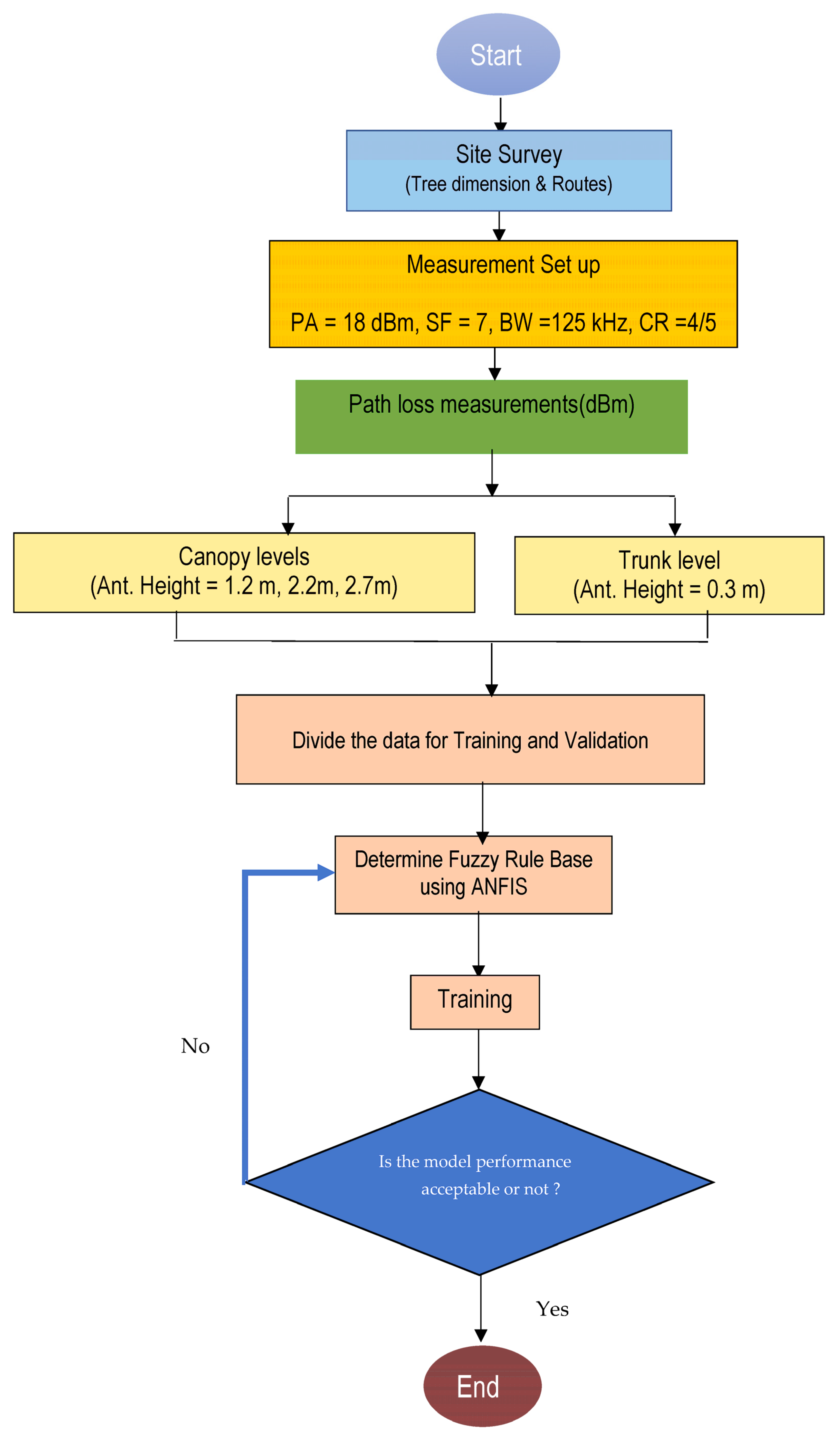
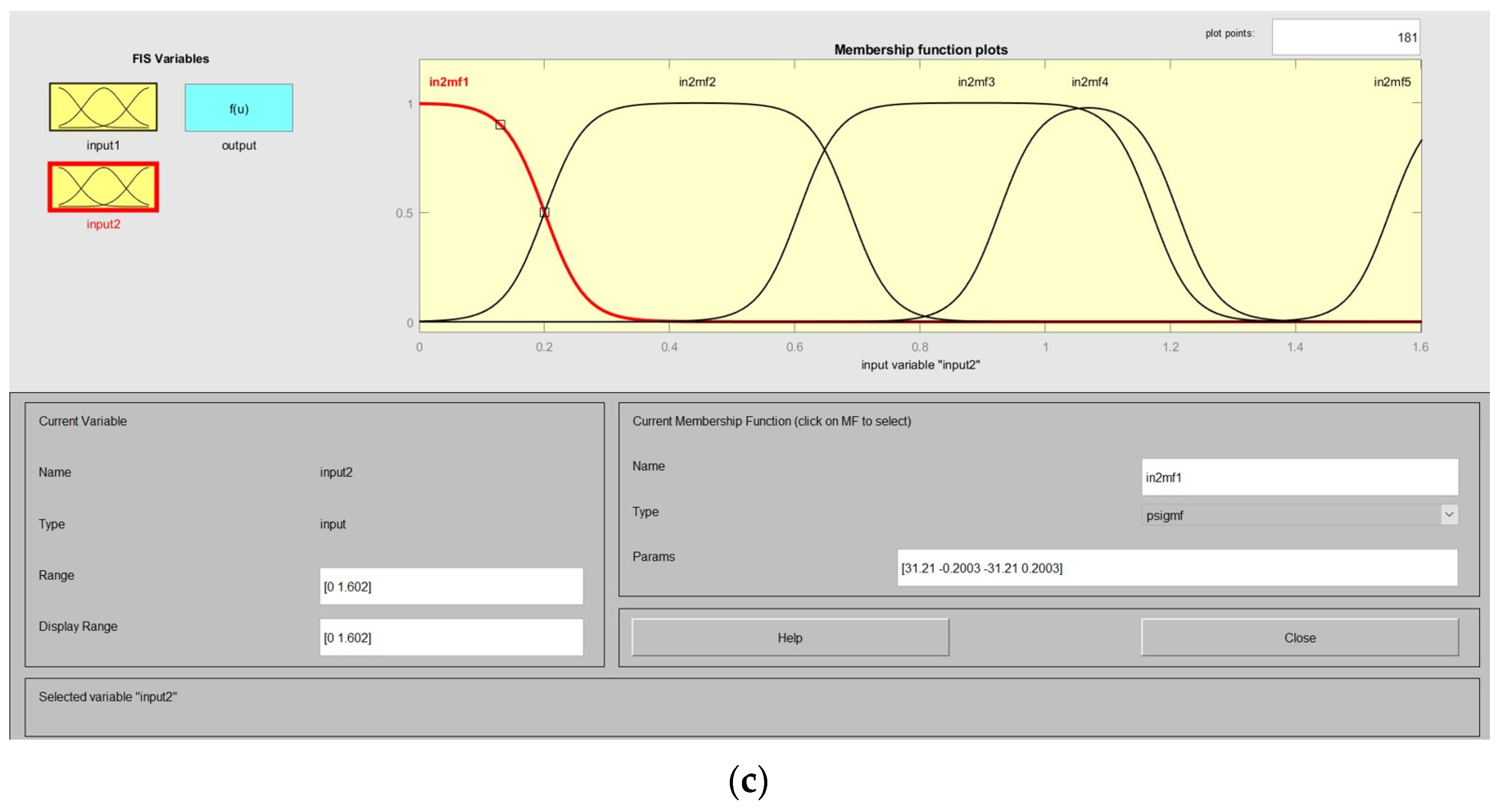
3. Proposed ANFIS Model
- where, and are the fuzzy description of the input sets, and fj are the crisp description of the outputs.
4. Experimental
4.1. Study Site
4.2. Measurement Setup
5. Results and Discussion
5.1. ANFIS Model and Validation
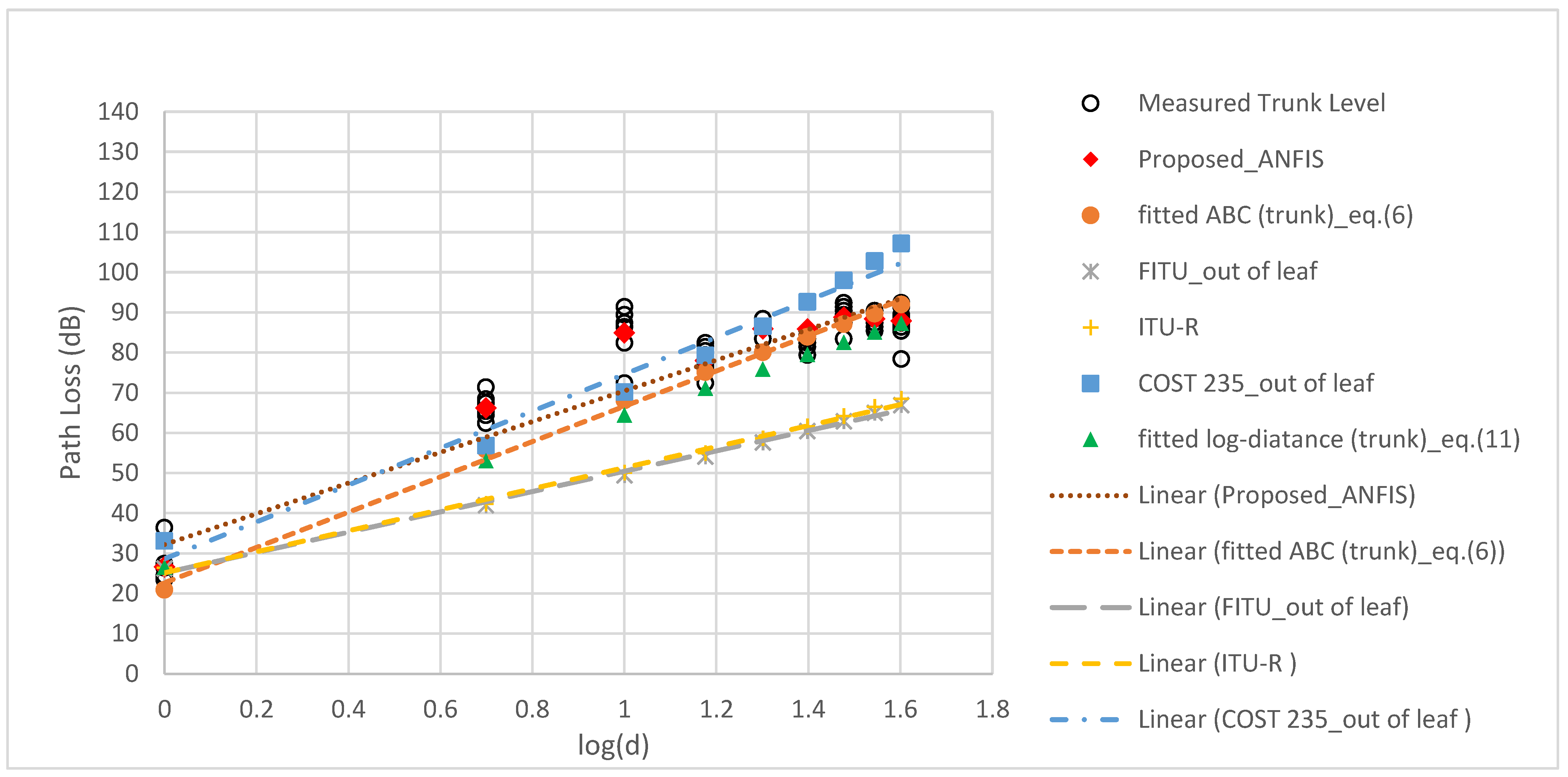
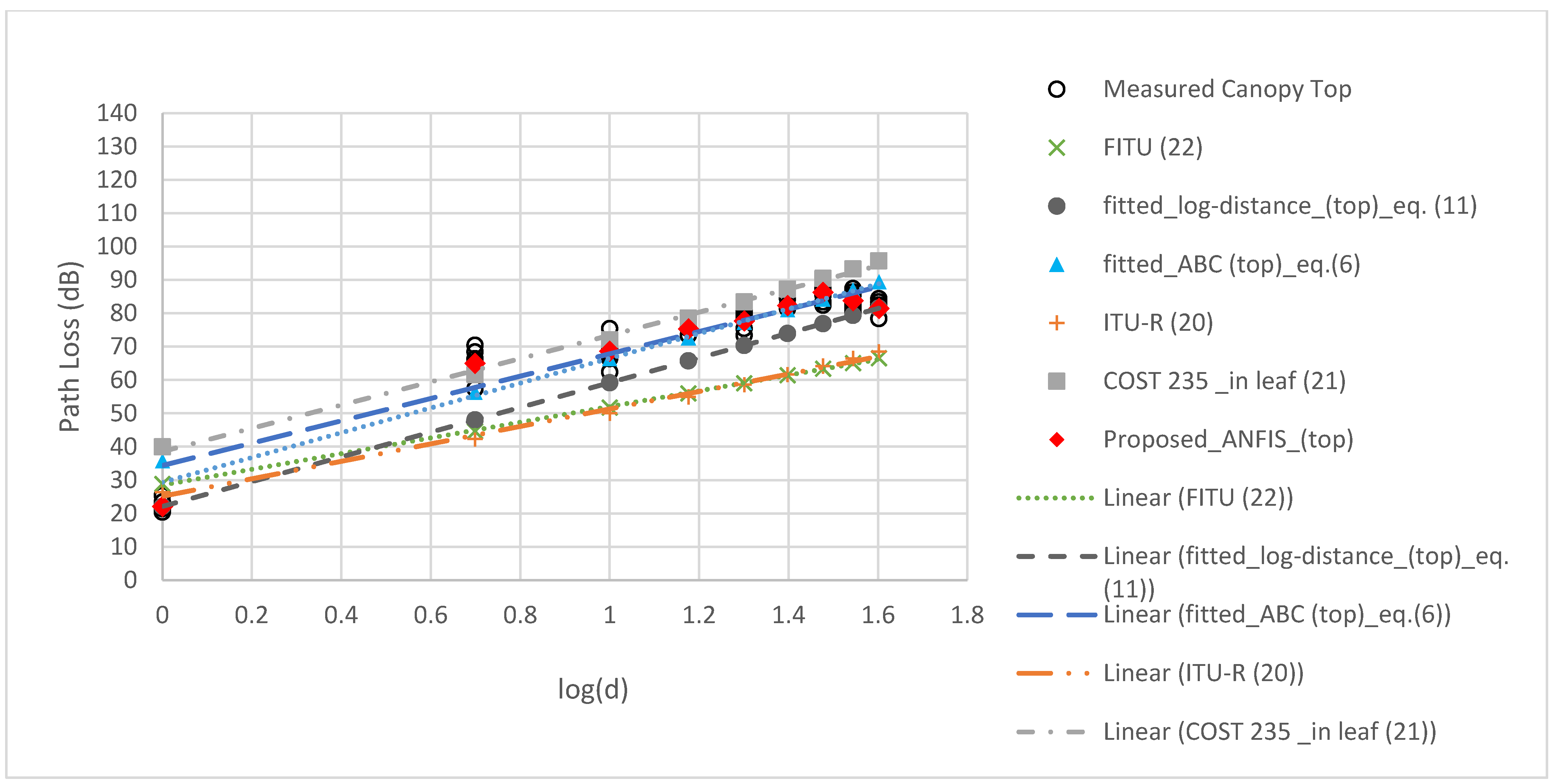
5.2. Data Analysis of Proposed Model
5.3. Comparison with Empirical Path Loss Models
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Attenuation in Vegetation, Radiocommunication Assembly, document ITU-R P.833-8, ITU-R, 2013.
- Raheemah, A.; Sabri, N.; Salim, M.S.; Ehkan, P.; Ahmad, R.B. New empirical path loss model for wireless sensor networks in mango greenhouses. Comput. Electron. Agric. 2016, 127, 553–560. [Google Scholar] [CrossRef]
- Anzum, R.; Habaebi, M.H.; Islam, R.; Hakim, G.P.N.; Khandaker, M.U.; Osman, H.; Alamri, S.; Elrahim, E.A. A multiwall path-loss prediction model using 433 MHz LoRa-WAN frequency to characterize foliage’s in-fluence in a Malaysian palm oil plantation environment. Sensors 2022, 22, 5397. [Google Scholar] [CrossRef] [PubMed]
- Anderson, C.R.; Volos, H.I.; Buehrer, R.M. Characterization of low-antenna ultrawideband propagation in a forest environment. IEEE Trans. Veh. Technol. 2013, 62, 2878–2895. [Google Scholar] [CrossRef]
- Azevedo, J.; Santos, F.E.S. An empirical propagation model for forest environments at tree trnk level. IEEE Trans. Antennas Propag. 2011, 59, 2357–2367. [Google Scholar] [CrossRef]
- Barrios-Ulloa, A.; Ariza-Colpas, P.P.; Sánchez-Moreno, H.; Quintero-Linero, A.P.; De la Hoz-Franco, E. Modeling radio wave propagation for wireless sensor networks in vegetated environments: A systematic literature review. Sensors 2022, 22, 5285. [Google Scholar] [CrossRef]
- Meng, Y.S.; Lee, Y.H.; Ng, B.C. Empirical near ground path loss modeling in a forest at VHF and UHF bands. IEEE Trans. Antennas Propag. 2009, 57, 1461–1468. [Google Scholar] [CrossRef]
- Meng, Y.S.; Lee, Y.H. Investigations of foliage effect on modern wireless communication systems: A review. Prog. Electromagn. Res. 2010, 105, 313–332. [Google Scholar] [CrossRef]
- Tang, W.; Ma, X.; Wei, J.; Wang, Z. Measurement and analysis of near-ground propagation models under different terrains for wireless sensor networks. Sensors 2019, 19, 1901. [Google Scholar] [CrossRef]
- de Jong, Y.L.C.; Herben, M.H.A.J. A tree-scattering model for improved propagation prediction in urban microcells. IEEE Trans. Veh. Technol. 2004, 53, 503–513. [Google Scholar] [CrossRef]
- Pinto, D.C.; Damas, M.; Holgado-Terriza, J.A.; Arrabal-Campos, F.M.; Gómez-Mula, F.; Martínez-Lao, J.A.M.; Cama-Pinto, A. Empirical Model of Radio Wave Propagation in the Presence of Vegetation inside Greenhouses Using Regularized Regressions. Sensors 2020, 20, 6621. [Google Scholar] [CrossRef]
- Leonor, N.; Caldeirinha, R.; Fernandes, T.; Ferreira, D.; Sánchez, M.G. A 2D ray-tracing based model for micro-and millimeter-wave propagation through vegetation. IEEE Trans. Antennas Propag. 2014, 62, 6443–6453. [Google Scholar] [CrossRef]
- Leonor, N.; Sánchez, R.M.G.; Fernandes, T.; Ferreira, D. A 2D ray-tracing based model for wave propagation through forests at micro and millimeter wave frequencis. IEEE Access 2018, 6, 32097–32108. [Google Scholar] [CrossRef]
- Chiroma, H.; Nickolas, P.; Faruk, N.; Alozief, E.; Olayinkaf, I.F.Y.; Adewole, K.S.; Abdulkarimh, A.; Oloyedef, A.A.; Sowandef, O.A.; Garbai, S.; et al. Large scale survey for radio propagation in developing machine learning model for path losses in communication systems. Sci. Afr. J. 2023, 19, e01550. [Google Scholar] [CrossRef]
- Hakim, G.P.N.; Habaebi, M.H.; Toha, S.F.; Islam, M.R.; Yusoff, S.H.B.; Adesta, E.Y.T.; Anzum, R. Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments. Sensors 2022, 22, 3267. [Google Scholar] [CrossRef]
- Faruk, N.; Popoola, S.I.; Surajudeen-Bakinde, N.T.; Oloyede, A.A.; Abulkarim, A.; Olawoyin, L.A.; Ali, M.; Calafate, C.T.; Atayero, A.A. Path Loss predictions in the VHF and UHF bands within urban environments: Experimental investigation of empirical, heuristics and geospatial models. IEEE Access 2019, 7, 77293–77307. [Google Scholar] [CrossRef]
- Nunez, Y.; Lovisolo, L.; Mello, L.S.; Orihuela, C. Path-Loss Prediction of Millimeter-wave using Machine Learning Techniques. In Proceedings of the 2022 IEEE Latin-American Conference on Communications (LATINCOM), Rio de Janeiro, Brazil, 30 November–2 December 2022; pp. 1–4. [Google Scholar]
- Famoriji, O.J.; Shongwe, T. Path loss prediction in Tropical regions using machine learning techniques: A case study. Electronics 2022, 11, 2711. [Google Scholar] [CrossRef]
- Cruz, H.A.O.; Nascimento, R.N.A.; Araujo, J.P.L.; Pelaes, E.G.; Cavalcante, G.P.S. Methodologies for path loss prediction in LTE-1.8 GHz networks using neuro-fuzzy and ANN. In Proceedings of the 2017 SBMO/IEEE MTT-S International Microwave and Optoelectronics Conference (IMOC), Aguas de Lindoia, Brazil, 27–30 August 2017. [Google Scholar]
- Wu, L.; He, D.; Ai, B.; Wang, J.; Qi, H.; Guan, K.; Zhong, Z. Artificial Neural Network Based Path Loss Prediction for Wireless Communication Network. IEEE Access 2020, 8, 199523–199538. [Google Scholar] [CrossRef]
- Ostlin, E.; Zepernick, H.J.; Suzuki, H. Macro cell Path-Loss Prediction Using Artificial Neural Networks. IEEE Trans. Veh. Technol. 2010, 59, 2735–2747. [Google Scholar] [CrossRef]
- Egi, Y.; Otero, C.E. Machine-Learning and 3D Point-Cloud Based Signal Power Path Loss Model for the Deployment of Wireless Communication Systems. IEEE Access 2019, 7, 42507–42517. [Google Scholar] [CrossRef]
- CCIR. Influences of Terrain Irregularities and Vegetation on Troposphere Propagation; CCIR: Geneva, Switzerland, 1986; pp. 235–236, CCIR Rep. [Google Scholar]
- European Commission. COST 235: Radio Propagation Effects on Next-Generation Fixed-Service Terrestrial Telecommunication Systems; European Union: Luxembourg, 1996; Final Rep. [Google Scholar]
- Parsons, J.D. The Mobile Radio Propagation Channel, 2nd ed.; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Rappaport, T.S. Wireless Communication; Prentic Hall Publishers: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Zadeh, L.A. The Concept of a Linguistic Variable and its Application to Approximate Reasoning. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Jang, J.S.R. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Khan, M.Z.; Khan, M.F. Application of ANFIS, ANN, and fuzzy time series models to CO2 emission from the energy sector and global temperature increase. Int. J. Clim. Chang. Strateg. Manag. 2019, 11, 622–642. [Google Scholar] [CrossRef]
- Sarıca, B.; Eğrioğlu, E.; Aşıkgil, B. A new hybrid method for time series forecasting: AR–ANFIS. Neural Comput. Appl. 2018, 29, 749–760. [Google Scholar] [CrossRef]
- Vlasenko, A.; Vlasenko, N.; Vynokurova, O.; Peleshko, D. A Novel Neuro-Fuzzy Model for Multivariate Time-Series Prediction. Data 2018, 3, 62. [Google Scholar] [CrossRef]
- Citoni, B.; Fioranelli, F.; Imran, M.A.; Abbasi, Q.H. Internet of Things and LoRaWAN-Enabled Future Smart Farming. IEEE Internet Things Mag. 2019, 2, 14–19. [Google Scholar] [CrossRef]
- Onykiienko, Y.; Popovych, P.; Yaroshenko, R.; Mitsukova, A.; Beldyagina, A.; Makarenko, Y. Using RSSI data for LoRa network path loss modeling. In Proceedings of the 2022 IEEE 41st International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 10–14 October 2022; pp. 576–580. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Antenna Height (m) | (dB) | PLE (NLOS) | A | B | C |
|---|---|---|---|---|---|
| 0.3 | 26.57 | 3.79 | 0.98 | 0.39 | 0.34 |
| 1.2 | 23.2 | 3.84 | 0.8 | 0.39 | 0.35 |
| 2.2 | 17.54 | 4.33 | 0.98 | 0.39 | 0.33 |
| 2.7 | 22.1 | 3.71 | 1.0 | 0.39 | 0.3 |
| No. | Total Height | Trunk Height | Trunk Diameter | Canopy Depth | Canopy Diameter |
|---|---|---|---|---|---|
| Tree 1 | 3.82 | 0.56 | 0.4 | 3.4 | 5.5 |
| Tree 2 | 4.66 | 0.66 | 0.56 | 4.0 | 6.0 |
| Tree 3 | 4.79 | 0.49 | 0.45 | 4.3 | 5.6 |
| Tree 4 | 5.15 | 0.65 | 0.64 | 4.5 | 6.5 |
| Tree 5 | 4.77 | 0.47 | 0.63 | 4.3 | 6.2 |
| Tree 6 | 3.96 | 0.46 | 0.46 | 3.5 | 4.7 |
| Tree 7 | 4.85 | 0.65 | 0.54 | 4.2 | 6.0 |
| Tree 8 | 3.97 | 0.47 | 0.43 | 3.5 | 5.0 |
| Average | 4.50 | 0.55 | 0.51 | 3.96. | 5.69 |
| No. | Parameters | Value | Unit |
|---|---|---|---|
| 1 | Power amplifier (PA) | 18 | dBm |
| 2 | Antenna gain | 2.2 | dBi |
| 3 | Frequency | 433 | MHz |
| 4 | Bandwidth (BW) | 125 | kHz |
| 5 | Spreading factor | 7 | - |
| 6 | Code rate (CR) | 4/5 | - |
| 7 | Offset factor (K) | 28 | dBm |
| Antenna Height (m) | ANFIS Validation | |
|---|---|---|
| 0.3 (Trunk) | 3.17 | 3.31 |
| 1.2 (Canopy_bottom) | 1.34 | 1.58 |
| 2.2 (Canopy_middle) | 1.65 | 1.57 |
| 2.7 (Canopy_top) | 2.61 | 2.60 |
| Antenna Height (m) | AME | |||||
|---|---|---|---|---|---|---|
| Exponential Decay Equation (6) | Log-Distance Equation (11) | ITU-R | COST235 | FITU-R | ANFIS | |
| 0.3 (Trunk) | 0.11 | 5.73 | 19.33 | 5.41 | 20.26 | 0.32 |
| 1.2 (Canopy_bottom) | 0.28 | 3.14 | 15.91 | 7.91 | 15.69 | 0.01 |
| 2.2 (Canopy_middle) | 1.71 | 5.36 | 17.64 | 5.76 | 17.24 | 0.06 |
| 2.7 (Canopy_top) | 0.77 | 7.3 | 16.82 | 6.54 | 16.47 | 0.02 |
| Antenna Height (m) | MAE | |||||
|---|---|---|---|---|---|---|
| Exponential Decay Equation (6) | Log-Distance Equation (11) | ITU-R | COST235 | FITU-R | ANFIS | |
| 0.3 (Trunk) | 6.17 | 6.32 | 19.63 | 10.19 | 20.55 | 2.43 |
| 1.2 (Canopy_bottom) | 2.66 | 3.36 | 16.39 | 7.91 | 16.49 | 1.03 |
| 2.2 (Canopy_middle) | 4.71 | 5.52 | 19.08 | 6.86 | 19.09 | 1.27 |
| 2.7 (Canopy_top) | 0.77 | 7.61 | 17.69 | 7.45 | 17.84 | 2.08 |
| Antenna Height (m) | MAPE | |||||
|---|---|---|---|---|---|---|
| Exponential Decay Equation (6) | Log-Distance Equation (11) | ITU-R | COST235 | FITU-R | ANFIS | |
| 0.3 (Trunk) | 11.91 | 8.89 | 25.09 | 15.49 | 26.20 | 3.81 |
| 1.2 (Canopy_bottom) | 5.8 | 4.9 | 22.3 | 14.04 | 22.73 | 1.64 |
| 2.2 (Canopy_middle) | 12.48 | 7.51 | 27.57 | 17.11 | 28.22 | 1.76 |
| 2.7 (Canopy_top) | 11.08 | 10.51 | 24.42 | 15.5 | 25.28 | 3.16 |
| Antenna Height (m) | RMSE | |||||
|---|---|---|---|---|---|---|
| Exponential Decay Equation (6) | Log-Distance Equation (11) | ITU-R | COST235 | FITU-R | ANFIS | |
| 0.3 (Trunk) | 7.74 | 8.59 | 21.65 | 11.77 | 22.59 | 3.17 |
| 1.2 (Canopy_bottom) | 3.69 | 4.08 | 16.96 | 8.61 | 17.1 | 1.34 |
| 2.2 (Canopy_middle) | 6.7 | 7.05 | 19.84 | 8.63 | 19.87 | 1.65 |
| 2.7 (Canopy_top) | 6.52 | 9.1 | 18.62 | 9.09 | 18.53 | 2.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phaiboon, S.; Phokharatkul, P. Applying an Adaptive Neuro-Fuzzy Inference System to Path Loss Prediction in a Ruby Mango Plantation. J. Sens. Actuator Netw. 2023, 12, 71. https://doi.org/10.3390/jsan12050071
Phaiboon S, Phokharatkul P. Applying an Adaptive Neuro-Fuzzy Inference System to Path Loss Prediction in a Ruby Mango Plantation. Journal of Sensor and Actuator Networks. 2023; 12(5):71. https://doi.org/10.3390/jsan12050071
Chicago/Turabian StylePhaiboon, Supachai, and Pisit Phokharatkul. 2023. "Applying an Adaptive Neuro-Fuzzy Inference System to Path Loss Prediction in a Ruby Mango Plantation" Journal of Sensor and Actuator Networks 12, no. 5: 71. https://doi.org/10.3390/jsan12050071
APA StylePhaiboon, S., & Phokharatkul, P. (2023). Applying an Adaptive Neuro-Fuzzy Inference System to Path Loss Prediction in a Ruby Mango Plantation. Journal of Sensor and Actuator Networks, 12(5), 71. https://doi.org/10.3390/jsan12050071