1. Introduction
Automated sensing of vegetation could benefit many applications in agricultural monitoring where repeat measurements by traditional methods are expensive or time-consuming. In grazing-based industries, gathering information on feed resources through traditional methods for measuring pasture biomass (e.g., pasture cuts, visual assessments and plate meters) [
1] is time-consuming and error-prone. While pasture monitoring using remotely sensed data has been shown to be useful for measuring pasture characteristics such as growth rate [
2] and biomass [
3,
4], the data requirements of image frequency and spatial scale do not always match with the operational needs of a rapidly changing agricultural system. Ground-based or proximal-sensing systems which collect data on vegetation status via multiple automated sensor nodes embedded within a wireless sensor network (WSN) have the potential to collect data with lower cost, and without the delays and access issues typical of repeated manual surveys [
5]. Ground based sensors can avoid some of the issues associated with the satellite remote sensing commonly used for remote broad-area monitoring, such as cloud cover and infrequent overpass times. Furthermore, observations from ground based sensors, can also be combined with, and complement remotely sensed data (e.g., Landsat, MODIS) [
6].
Potential applications of automated monitoring using sensors include studies of vegetation and habitat microclimate [
7,
8,
9], phenology [
8], soil processes and moisture [
10] as well as animal-landscape interactions [
11,
12]. In a pasture monitoring context, sensors may be used to trigger alerts, such as to indicate overgrazing or other degradation (e.g., near stock watering points, or in sensitive riparian zones). Other potential applications for longer term automated vegetation sensing include carbon flux studies and monitoring of changes after restoration actions (e.g., effectiveness of on-ground actions in restoring grasslands), post fire recovery and monitoring of mine site remediation.
An operational system for long-term vegetation monitoring depends on more than the sensor and wireless networking technologies. To capture data with known quality, the system needs to incorporate management of the sensor data, the calibration to raw data, the generation of derived values, and delivery of information to the end user.
In this study we describe the successful deployment of a prototype of an end-to-end system for using multiple proximal sensors (multispectral sensors and digital cameras) to monitor pastures, with data delivered in near real-time. We show that there are many technical issues involved in such a deployment, and we share insights relevant for other researchers who may consider using WSNs for pasture monitoring specifically, and vegetation monitoring in general. We also aim to compare the utility of data obtained from the two types of sensors, and evaluate whether co-deployment of different sensors would generate additional benefits. Our prototype system includes one multispectral sensor with high spectral resolution which has the potential to return data comparable to satellite data, as well as a low cost, off-the-shelf digital camera, which provides finer spatial resolution, but limited spectral resolution. We outline the diverse issues that may affect the success of similar deployments, and provide recommendations for utilizing multiple proximal sensors for monitoring vegetation within the varied conditions of a pasture-based environment.
2. Methods
2.1. Study Sites
We used two different study sites and sensor arrangements to enable the prototype system for pasture monitoring to be trialed over different conditions. Both sites are in the temperate climatic zone of south eastern Australia, with hot dry summers and a cool, to cold and wet, winters. Each of the study sites had vegetation that was predominantly temperate grasses. The WSN used at both sites consisted of two nodes, mounted with the sensors, and a separate gateway node. At each study site the sensor nodes were placed approximately 100 m apart over similar vegetation types. During 2009 and 2010 the two nodes operated at the Majura, ACT, Australia (35°13'32.69"S, 149°13'39.63"E, elevation 707 m) study site [
13], and during the latter half of 2010 the two nodes at the Crace, ACT, Australia (35°13'14.72"S, 149°7'29.00"E, elevation 594 m) study site.
2.2. Multispectral Sensors
Much of the focus of monitoring vegetation using multispectral sensors utilizes the near infrared (NIR) region of the electromagnetic spectrum which is sensitive to photosynthetically active (
i.e., green) vegetation. There is a rich body of literature related to monitoring vegetation ‘greenness’ from multispectral sensors using spectral ratios such as the normalized difference vegetation index (NDVI) [
14], and the calibration of such indices to the biophysical properties of the vegetation such as biomass [
15,
16], leaf area index [
17], percentage vegetation cover [
18], or the fraction of photosynthetically active radiation absorbed by a canopy [
19,
20]. The shortwave infrared (SWIR) region of the electromagnetic spectrum is sensitive to plant moisture content [
21]. Data from both the SWIR and upper NIR regions can be used to help differentiate photosynthetically active (
i.e., green) vegetation from both non-photosynthetically active (
i.e., dry/dead) vegetation and soil [
22] for example under the combination of changing seasonal conditions, and farm management practices such as repeat grazing by livestock [
3].
Our study used a combination of multispectral sensors and digital cameras installed on each node to provide spatially-coincident data with both high temporal and high spatial resolution. The multispectral sensors were Skye SKR-1850 four-band weatherproof sensors which are laboratory-calibrated to UK National Standards. Such high calibration standards are necessary to ensure the spectral data we obtained could be compared between nodes and over an extended period. We selected sensors with green, red, and both lower and upper NIR bands (with band centers of 544, 650, 833, 1047 nm respectively). This configuration of bands was selected specifically for monitoring pastures which typically have a mix of photosynthetically active and non-photosynthetically active vegetation, and background soil. Other vegetation-sensing applications might instead choose the fourth band to be in the red-edge part of the electromagnetic spectrum which may be useful in monitoring vegetation growth and health [
23,
24].
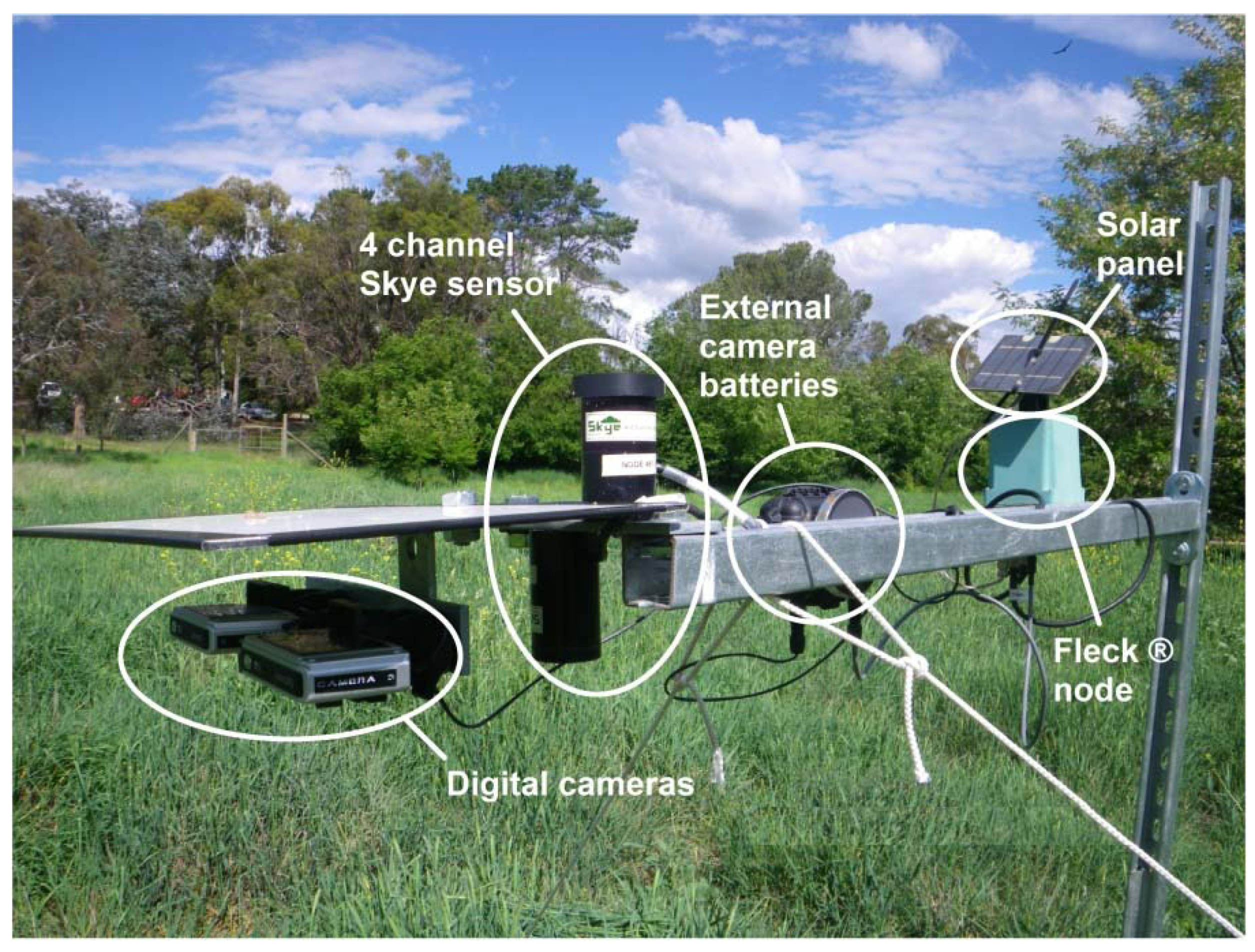
The Skye-1850 sensors can be used with or without a cosine diffuser fitted, which alters the conical field of view (FOV) of 25° to a full hemispherical view. We used a typical setup for paired sensors, which is to have the upward-pointing sensor with the cosine diffuser filter in place, but the downward-pointing sensor with no cosine diffuser filter (
Figure 1). In this arrangement, the downward-pointing sensor only senses reflected light from the ground directly beneath the sensor, and not other parts of the landscape. This setup allows the albedo of the surface to be calculated relative to the actual incident solar radiation, which varies with diurnal and seasonal changes in solar elevation, and cloud shadows. In our sensor deployment multispectral sensor readings were captured every minute.
Figure 1.
Node with solar powered Fleck®, paired multispectral sensors and digital cameras. Note the cosine diffusion filter is fitted to only the upward-pointing sensor.
Figure 1.
Node with solar powered Fleck®, paired multispectral sensors and digital cameras. Note the cosine diffusion filter is fitted to only the upward-pointing sensor.
2.3. Digital Cameras
We deployed two types of digital cameras in this study. The Pentax Optio W60 digital cameras used in this study were inexpensive, weatherproof and had an inbuilt intervalometer to enable automatic shooting at fixed intervals. These RGB cameras were deployed during the study period in a downward-pointing position. Due to battery limitations, the cameras were restricted to acquiring images at 90 minute intervals. These cameras sensed thousands of pixels, but in un-calibrated red, green and blue (RGB) spectral bands. In our prototype system this high spatial resolution was desired under the research criteria of obtaining high-resolution data for testing the image processing algorithms, although in operational use such high resolution is not necessary.
Standard RGB digital cameras are limited in their application to vegetation monitoring due to the absence of an NIR spectral band. To address this limitation, we also deployed cameras that were similar to our RGB cameras, but which had been modified internally to convert them to be broadband infrared-sensitive cameras.
To enable consistent rectification of digital images to the same area of ground over a long running trial, we fixed 20 mm diameter yellow markers as ground control points (GCPs) at the corners of a 1 m square quadrat in the centre of the field of view below each node. We also secured both the RGB and infrared cameras using quick-release tripod mounts to improve their re-alignment after handling for maintenance.
2.4. Data Capture and Networking
Each sensor node (
Figure 1) comprised of a solar-powered Fleck
® unit [
25] which provide a means to capture and relay sensor data to a separate gateway node. The Fleck
® units used in this study are comprised from an ATmega128L low power microcontroller and a Nordic nRF905 digital radio (utilizing the 915 MHz ISM band). Each packet of up to 32 bytes length transmitted by the sensor node contains a 2 byte CRC16 check to detect corrupted bits. With a suitable antenna (unity gain 915 MHz quarter-wave monopole), the Fleck
® can communicate up to 1 km. In our sensor deployment the relatively short distances between the nodes and the base meant that the number of packets missed due to inter-node link quality was negligible. The gateway was comprised of a Fleck
® connected to an embedded Linux computer (ALIX PC from
http://pcengines.ch), which provided a managed virtual private network (VPN) via a 3G modem to transmit sensor data streams to a centralized enterprise database. Additionally, the gateway provided data buffering to reduce data loss in the event of mobile network outages. As well as sensor data, various statistics relating to node status (e.g., Fleck
® solar and battery voltages) were uploaded to a database server from which subsets could be extracted for analysis.
In our sensor deployment, camera images were captured every 60 or 90 minutes, but multispectral sensor readings were captured every minute. The multispectral sensor data volumes were small enough to be transmitted in near real-time via the WSN, however the high resolution digital images (approximately 2 MB each) used for the research aspects of this study were too large for network transfer over our prototype system, and were instead downloaded manually. In an operational system it is likely that coarser resolution digital images would be used, and these could potentially be sent directly over the network.
2.5. Data Management
Standards and infrastructure for the management and sharing of diverse spatio-temporal data from environmental sensor networks is improving [
26]. However, it is still frequently necessary to develop custom tools and scripts to assist in data handling. We developed Python (Python Software Foundation) and R (R Foundation for Statistical Computing) scripts to automate the download of sensor data at regular intervals from a centralized enterprise database to a personal database in which we had the flexibility required for research analysis purposes. These scripts also permitted monitoring for missing data and out-of-range values, such as low camera battery voltage readings, which triggered an alert email to staff.
With large data volumes and frequent updates, careful design of the database structure can improve performance and flexibility. We implemented a relational database table structure which linked the raw multispectral sensor readings to a table containing sensor calibration values, and which allowed rapid calculation of calibrated spectral indices (e.g., NDVI) within the database. A separate database table was also used to link each sensor to a node, and position (upward-pointing or downward-pointing sensing) on a node. This table design provided the flexibility for moving the multispectral sensors to different upward-pointing or downward-pointing positions on the same or other nodes, such as was necessary in the diagnosis of sensor problems.
Camera images were retained as separate image files on computer disk. Python scripts were also used for tasks such as renaming and subsetting images. In one instance where a camera date was found to have been incorrect, a Python script was used for correcting the timestamps of large numbers of digital images.
2.6. Supporting Structure
As our study sites had low-growing temperate grasses, the sensors were located at a height of 1.5 m above the ground. Each node sensed approximately the same spatial footprint at nadir. The 10 megapixel images from the cameras provided approximately 0.5 mm ground resolution at that height. The multispectral sensors provided a calibrated numeric output for each spectral band at a high temporal frequency (
i.e., 1 minute) at a single point. For a downward-pointing multispectral sensor mounted at 1.5 m above ground the 25° FOV enables sensing of approximately 0.35 m² of ground area, and at 2.5 m height will sense 1 m². Balzarolo
et al. [
27] summarize optical sensor configurations, including their height and field of view, for a range of research sites.
We constructed the sensor node structures using slotted galvanized steel channel posts and support arms which provided a versatile, adjustable and corrosion resistant framework on which communications equipment and sensors were supported. Stability was improved by attaching guy-ropes to the node structure.
3. Results
The multiple sensors in our vegetation monitoring system successfully captured data at two sites over two seasonal time periods, and over a range of environmental conditions. During the prototype deployment we encountered a variety of technical issues related to the functioning of the sensors, the node structure, and the network and delivery systems. In this section we present results which relate to understanding the prototype system and overcoming technical, environmental, and practical issues.
3.1. Multispectral Sensors
During the study an issue we encountered and corrected with the Skye multispectral sensor was that the output of one of the 830 nm multispectral sensor bands experienced clipping during the middle of the day in full sunshine conditions (
Figure 2). This was the result of the analogue-to-digital gain having been calibrated at a different geographic latitude and time of year to the operational deployment, and therefore with a range of expected values narrower than those detected by the sensors in our field trials. To rectify this problem we needed to replace resistors on the Fleck
® node circuit boards, which set the amplifier gain of the analogue multispectral sensor signal. The resistors were replaced with lower-resistance resistors to allow the analogue to digital convertor (ADC) to capture the full range of values output by the multispectral sensors.
Figure 2.
Upward-pointing multispectral sensor readings showing gain calibration issue resulting in clipping of NIR band (830 nm) readings during the middle hours of a summer day (3 December 2009), due to incorrect analogue to digital converter calibration.
Figure 2.
Upward-pointing multispectral sensor readings showing gain calibration issue resulting in clipping of NIR band (830 nm) readings during the middle hours of a summer day (3 December 2009), due to incorrect analogue to digital converter calibration.
When considering shade and reflection possibilities at a site, it is important to allow for diurnal and seasonal changes in sun angles. For our Majura site the variation in midday solar altitude varied from ~78° in midsummer, to approximately 31° in midwinter. Shadows cast by taller vegetation at these extremes differs substantially throughout the year and after some problems with shading at the Majura deployment, the Gungahlin deployment sited nodes more carefully to avoid winter shading.
Reflections of solar radiation from water bodies and other bright surfaces, or shade falling differentially over the upward-pointing of the paired multispectral sensors, may interfere with observations. In our study we initially observed an unexpected dip in the NDVI calculations from the multispectral readings during the middle of the day (
Figure 3). This occurred when sun angles were high during the summer period, and we found that in this initial deployment the node structure itself caused shadow to fall over the area of ground sensed by the multispectral sensors (e.g., as captured by the digital camera images (
Figure 4(iii, v, vi, and ix)). We rectified this problem by rearranging the cameras and multispectral sensors on the node structure so that the multispectral sensor field of view was positioned to the north (
i.e., the less shaded side in the Southern Hemisphere) of the shaded area, and by reducing the size of the metal shade-cover we had mounted above the cameras.
Figure 3.
A dip observed in the raw readings and NDVI, resulting from the sensor node shading the sensed area during the middle of summer days (13 December 2010). The shade effect illustrated here is far less apparent in the raw readings from the downward-pointing sensors (which sense upward-welling radiation) than in the NDVI index calculated from the four sensors. Data from the other two bands, and the other calculated vegetation indices, is not shown.
Figure 3.
A dip observed in the raw readings and NDVI, resulting from the sensor node shading the sensed area during the middle of summer days (13 December 2010). The shade effect illustrated here is far less apparent in the raw readings from the downward-pointing sensors (which sense upward-welling radiation) than in the NDVI index calculated from the four sensors. Data from the other two bands, and the other calculated vegetation indices, is not shown.
3.2. Digital Cameras
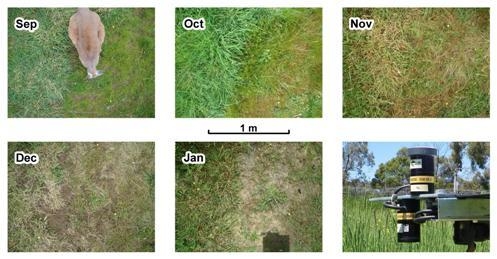
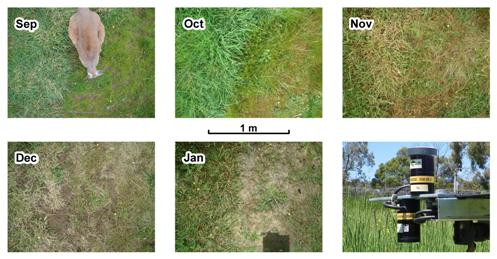
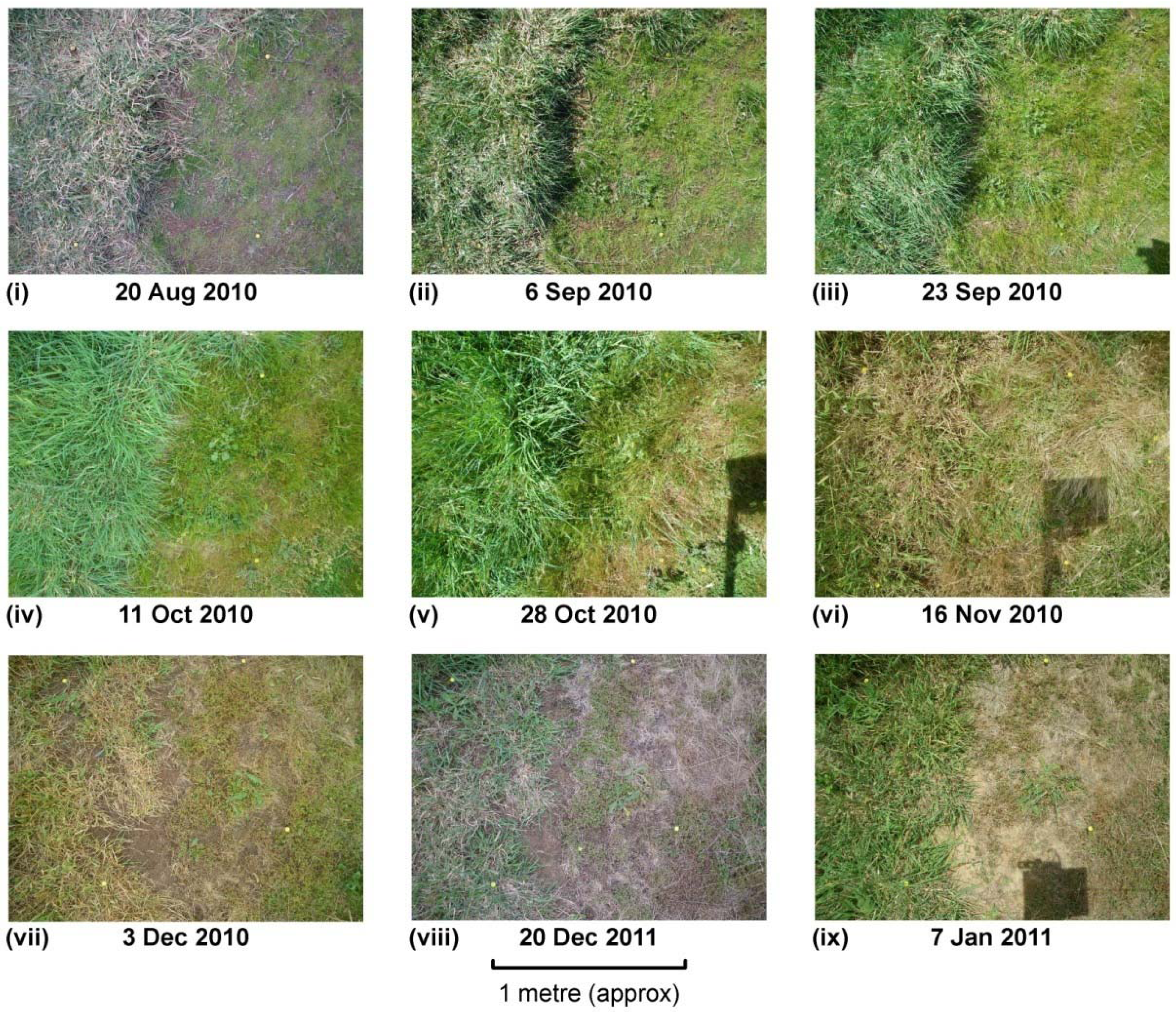
The cameras operated reliably through a range of adverse environmental conditions including ambient air temperatures ranging from −4.8 °C to +39.8 °C (recorded at a nearby Bureau of Meteorology station) and periods of intense rainfall. A time-series of images from the digital cameras is illustrated by
Figure 4, which shows images taken between noon and 1 pm, 17 days apart. These images are from an RGB digital camera mounted on a node at the Crace site (the infrared digital camera images are not shown). The images capture the seasonal progression from the southern-hemisphere spring (20 August 2010;
Figure 4(i)) through to summer (7 January 2011;
Figure 4(ix)). During the period shown in the images the vegetation was clipped twice to simulate grazing (11 November 2010, 25 November 2010). Shade from the node arm can be seen in the images shown in
Figure 4(iii, v, vi, and ix), prior to rearranging the position of the cameras on the node structure. The location of the shade in the images progresses across the year based on the position of the sun at the time the image was taken.
Figure 4.
Time-series of images from the RGB digital camera mounted on one of the nodes at the Crace site. Shadows from the node arm can be seen in iii, v, vi, and ix. The 20 mm diameter yellow markers used as GCPs for rectifying images are visible as white dots, but are obscured by grass in some images.
Figure 4.
Time-series of images from the RGB digital camera mounted on one of the nodes at the Crace site. Shadows from the node arm can be seen in iii, v, vi, and ix. The 20 mm diameter yellow markers used as GCPs for rectifying images are visible as white dots, but are obscured by grass in some images.
Using standard batteries, the cameras in our study operated for an average of 25 days taking 16 images per day (90 minute intervals) although there was noticeable variability between batteries. Site visits to replace batteries at field sites can be time consuming and potentially costly, so it is desirable to maximize the interval between battery changes. To allow the use of larger capacity batteries, we designed an adaptor to connect the digital cameras to an appropriately sized PDA battery located in a weatherproof housing (see
Figure 1). This modification allowed for swapping of batteries without interrupting data collection, and operation for longer periods. The external batteries were also connected to the WSN node which enabled remote monitoring of battery voltage. A drawback of this setup was that the modification of the camera housing to provide entry of the power cable which potentially impacted the weather resistance of the cameras, and therefore in a later deployment (not described here), we opted for using unmodified cameras. In an operational setting the use of batteries could be minimized by utilizing a solar panel.
The 20 mm diameter ground markers we used for geo-rectifying camera images were prone to being obscured by vegetation and became difficult to identify in the digital images (
Figure 4), but this can be addressed by taking a reference image containing a more-visible quadrat marker square placed during manual servicing. Additionally, with on-ground resolution of the digital images being less than one millimetre, we found that even small movements of the camera resulted in noticeable changes in alignment against the GCPs. Small movements of the node structure are unavoidable due to wind and differential expansion of the metal structure of the supports, but can be mitigated by the guy-ropes such we deployed.
3.3. Data Capture and Networking
WSN equipment needs to be capable of transmitting data effectively over the distances between nodes within the study site, and to a gateway node which relays data to a centralized repository (e.g., via the mobile data network). The ability to buffer data at the node or gateway, in case of temporary losses of network connection, can significantly increase the reliability of data collection and greatly enhance the completeness of data obtained. In our prototype system, unreliable communications caused by 3G modem failure and power/battery capacity was one of the major challenges. In several cases problems arose that could not be addressed without a field site visit, and on many occasions data was not successfully buffered prior to transmission across the network, which resulted in significant data gaps. For example, due to gateway or communication failures at our Crace deployment, we received only 82% of possible readings over a 79 day period of operation in 2010. At times nodes failed overnight due to Fleck® solar and/or battery capacity being too low to sustain operation during the more challenging short daylight and low solar elevation winter conditions, when solar power generation did not meet requirements. However, at such times in our study when the nodes failed overnight, data transmission restarted automatically in the morning after the solar panels had recharged the batteries sufficiently, and so this did not usually impact the data collection for the purpose of this study. The capacity of the solar panel and the batteries should be chosen carefully in future deployments, to ensure they are capable of operating through expected adverse conditions. In a separate deployment (not presented here) the sizing of batteries and solar panels were improved to better meet system requirements, and adjustments were made to the nodes to keep power consumption to a minimum.
3.4. Data Management
Confidence in the temporal relationship between different datasets is fundamental in dealing with multi-node, multi-sensor data as the timestamp is used to link different datasets. Our WSN applied a Coordinated Universal Time (UTC) timestamp to the multispectral data. However, the timestamp applied to camera images was that which was the local time manually set in each camera. On occasions, the camera times became incorrect due to loss of settings, and daylight savings changes needed to be accommodated. This problem could be avoided by setting the camera time to UTC instead of local time.
4. Discussion
In running our prototype study we encountered a range of challenges and issues inherent in the use of multiple sensors, including the design, setup, capture and validation of data, and the data management, quality control and analyses necessary to derive calibrated scientific information from the resulting data. The choice of sensors has implications for how rapidly and easily it is possible to get meaningful information from the raw sensor data, and whether having data from multiple sensors provide complementary information to aid in data gathering, quality control, and interpretation.
Table 1 summarizes key issues that should be considered in the design and operating proximal sensors within a WSN for pasture-monitoring specifically and vegetation monitoring in general, and categorizes their potential impacts on the success of a WSN deployment. Aspects of the system design and setup will impact differently on the use of these sensors in an operational deployment. In
Table 1 we summarize three categories of impacts. First the ability of the system to continue to operate and deliver a continuous data stream under the range of environmental and technical conditions expected to be encountered. Second, the quality of the data collected, by minimizing data noise (precision), and maximizing the accuracy of measurements. Third, whether the system is measuring what it is intended to measure, and whether the data collected suitable for the monitoring application.
Table 1.
Summary of the key issues in designing, operating proximal sensors within a WSN for vegetation monitoring and their potential impacts on the success of a WSN deployment.
Table 1.
Summary of the key issues in designing, operating proximal sensors within a WSN for vegetation monitoring and their potential impacts on the success of a WSN deployment.
| | | Impacts | |
|---|
| | Reliability and Data Flow | Data Quality | Data Appropriate to Needs |
|---|
| Multispectral Sensors | | | |
| Choice of sensors | Bands appropriate for sensing objectives | | X | X |
| Level of calibration required by application | | X | X |
| Physical robustness | X | X | |
| Cost and number of sensors | X | | X |
| Deployment | Logistics of paired upward and downward sensors | | X | X |
| Calibration requirements | | X | X |
| Cameras | | | | |
| Choice of cameras | Camera features: resolution, memory capacity | X | X | X |
| Physical robustness and weatherproofing | X | X | |
| Intervalometer/programmability | X | | X |
| Battery / power source | X | | |
| Cost and number of cameras | X | | X |
| Settings | ISO, white balance, aperture/exposure, flash consistent between cameras and over time | | X | X |
| Image file type | X | | X |
| Sensor network | | | | |
| Capabilities | Wireless network range (between nodes) | X | | X |
| Data buffering | X | X | |
| External network link | X | | X |
| Power (generation and storage) | X | | X |
| Cost and number of nodes | X | | X |
| Technical | Calibration of analogue to digital conversions | | X | X |
| Wiring/connection robustness and weatherproofing | X | X | |
| Deployment | Site selection and protection of equipment | X | | X |
| Supporting structure: stable and durable | X | X | |
| Spatial configuration of nodes | | X | X |
| Shade and reflection | | X | |
| Sensor FOV and height above surface | | X | X |
| Data management | | | | |
| Data collection | Sampling frequency (spatial, temporal) | | X | X |
| Databases and storage requirements | | | X |
| Timestamp consistency | | X | X |
| Data quality issues | Data cleaning (spikes, outliers, noise) | | X | X |
| Compensating for known variation (seasonal illumination differences, cloud) | | X | X |
| Testing of complete workflow, not just raw data | | X | X |
| Monitoring and maintenance | | | |
| Ongoing monitoring of data (automated alerts) | X | X | X |
| Regular calibration of sensors | | X | X |
| Physical maintenance and cleaning | X | X | |
As will be discussed in the following sections, the key aspects of designing an operational system for monitoring pastures using multiple sensors include sensor characteristics and sensor network equipment, deployment and management considerations as well as important aspects of managing data from multiple sensors and nodes.
4.1. Multispectral Sensors
If WSN nodes are to be located in close proximity and there are no shading issues, a single upward-pointing multispectral sensor may be adequate for several nodes with downward-pointing sensors, although this may have limitations in variable cloudy weather. Such a setup may assist in reducing the numbers of sensors required in a hierarchical sampling design to ensure wider spatial coverage. For example, if proximal spectral sensors are used to validate the footprint of a larger satellite pixel, a few highly calibrated Skye sensors can operate within a larger network of much lower cost (and less highly calibrated) sensors.
To prevent data value clipping issues such as we experienced (
Figure 2), care should be taken to ensure the analogue-to-digital conversion is appropriate for the range of sensor values, provides adequate data precision and that the gains are, preferably, calibrated to be consistent between nodes. If problems are encountered they can be manually addressed, as we did in the current deployment, by adjusting the gain settings in the analogue-to-digital conversion (ADC) of the sensor data. A feature of the equipment used in more recent deployments is that the gain settings are programmable on the node, which enables far more rapid adjustment than was possible for the current deployment. This issue highlights that a sensor deployment should include a testing period to identify any adjustments that must be made.
4.2. Calibration of Sensors
All sensors, whether from remote sensing or point- or array-based proximal sensing, require calibration to enable raw data to be converted to quantitative biophysical values such as biomass (kg·DM·ha−1), or the percentage of vegetation ground cover. Qualitative data can still provide meaningful information without calibration. For example the time-series of vegetation indices from a multispectral sensor can still indicate rapid changes in pasture status such as spring green-up, even when quantitative values are not available.
Where applicable, individual sensors should be calibrated to known standards. However, multispectral sensors used in an operational setting can degrade due to age, dust or fouling, or environmental exposure, and can be tested in the field against a standard target (such as a Spectralon
® panel of known reflectance). Digital cameras may also be subject to calibration drift. Ide and Oguma [
28] observed changes in colour balance in digital cameras that were used to study vegetation phenology over several years. Regular validation and attention to sensor calibration is necessary to ensure scientifically reliable data. Issues with calibration can be mitigated by planning a regular checking and maintenance schedule, rather than responding to irregularities as they arise.
4.3. Digital Cameras
The basic inbuilt intervalometer function in these cameras allowed images to be captured at fixed intervals up to a maximum of 99 minutes. A more flexible intervalometer function, either obtained through the use of an external camera controller, or inbuilt software modifications via camera programming software such as the Canon Hack Development Kit [
29], would allow more selective timing of image capture (
i.e., during daylight hours only) and would likely result in increased camera battery life, reduced data storage needs, and reduced time spent handling unwanted images.
When deploying and configuring digital cameras for vegetation monitoring it is important to decide on and ensure consistency of settings such as ISO (i.e., how sensitive a digital camera’s sensor is to light), white balance, whether the aperture and exposure should be automatic or fixed, whether flash should be used, and the interval between acquisition of images.
Many cameras also provide a choice of compressed (e.g., JPG) or uncompressed image formats (e.g., RAW). RAW formats contain the maximum possible detail recorded by the camera sensor, but result in larger file sizes and require additional post-processing such as the setting of white balance. In a study of canopy cover and leaf area, Pekin and Macfarlane [
30] found that image file type does not affect cover estimates. Lebourgeois
et al. [
31] noted that while the image format does not affect the correlation with the imaged vegetation, the use of RAW image format is recommended as it records sensor characteristics associated at the time of image capture. However, in a field deployment, tradeoffs must be made between the larger size of the RAW image format and the storage capacity of the camera memory. In our deployment we used the smaller JPG file format to reduce the frequency with which memory cards needed to be downloaded.
In our prototype system we chose cameras with a high spatial resolution, due to the research criteria of requiring high-resolution data for testing the image processing algorithms. We did not therefore implement the option of automated downloading of images across the network, both because of image size, and also because we used the multispectral sensor data as the test of the WSN part of our prototype. However, in an operational setting it may be possible to use a camera with a coarser spatial resolution, with the advantage of possibly transmitting the reduced data volumes directly over the network.
4.4. Infrared Cameras
An obvious deficiency of consumer-grade digital cameras for vegetation monitoring is the absence of an NIR-sensitive band which is frequently used to derive relevant vegetation indices such as NDVI. However, low cost modifications, such as we implemented, can be made to convert an off-the-shelf digital camera to a broadband infrared camera. After trialing two IR modified cameras on our nodes we have several reservations about their usefulness as proximal sensors for vegetation monitoring. First, in a dual-camera configuration such as in our prototype (one being an unmodified RGB, and another an IR modified camera) the different view angle of each camera produces images that do not exactly coincide, limiting the potential to combine the bands from each camera for analysis. Second, the vignetting effect (
i.e., the image brightness diminishing away from the centre) is more pronounced in the IR modified cameras than the RGB bands of an unmodified camera. Lebourgeois
et al. [
31] devised a method to apply a vignetting correction but this would add complexity to the image processing. Third, without expensive laboratory testing, the broad-band sensitivity of IR modified commercially-available camera is unknown, and a lack of standardization between camera models and their sensors, could result in cameras with different sensitivities, leading to difficulties in comparing between sites. We therefore did not find the use of separate IR cameras paired with RGB cameras useful for pasture monitoring.
4.5. Supporting Structure
While our sensors were located at a height suitable for low-growing temperate grasses, taller growing vegetation such as grasses in sub-tropical environments would pose additional challenges as the field of view of the cameras and multispectral sensors will change as the grasses grow.
Sensor networks are embedded within the environment and are thus greatly affected by it [
32], so it is important to plan for weather extremes such as rain, heat, cold and frost, hail, humidity and condensation, and even lightning. It is important to consider the potential for animal damage to sensor equipment, for example large mammals, rodents and birds can potentially damage sensor equipment and cables, invertebrates such as spiders may obstruct optical sensors, and ants can enter very small openings in electronic equipment to establish nesting sites. Prior to deployment of our sensors we constructed a ‘dummy’ sensor node to test its robustness to animal disturbances (primarily kangaroo impacts). Although our digital cameras were rated as ‘weatherproof’ we added a shade to provide protection from extended exposure to direct sunlight, as well as rain and hail.
Care needs to be taken to ensure that no part of the node infrastructure or the attached equipment affects the study area by shading or obstruction of the sensor field of view. This represents a significant challenge depending on the latitude of the study site. Cables should be well secured to prevent shadowing of the sensed area. The physical stability of the structure is also important, as this can reduce movement of cameras and sensors with respect to the ground being monitored. A sturdy node structure is particularly important when the nodes are located in paddocks with grazing livestock who often rub against any structure they can access.
4.6. Wireless Sensor Network
To prevent data loss, the gateway node should have the ability to reset its connection automatically, or be remotely reset (such as by an SMS message). Power requirements need to be adequately met through on-site generation (e.g., solar panels) and battery storage and capacity must be adequate for the full range of expected seasonal and weather conditions.
Although many issues can be prevented by using reliable hardware, the data flow from any field deployment needs to be automatically monitored, and alerts triggered in a timely manner if issues arise.
4.7. Data Management
The need to aggregate temporal datasets from multiple sensors requires a structured approach to data handling and storage from the outset of a project. At the most basic level there needs to be consistency in the terminology used for the naming of nodes, sensors, sites and quadrats. Robust analysis requires that all datasets and derivatives have a timestamp, and be clearly associated with their source node and sensor. Auxiliary data from diverse sources such as weather records, other sensors (e.g., soil moisture sensors, animal movement sensors) and ad hoc site observations may also be relevant to the analyses performed. Correctly linking these diverse datasets, and any derivatives such as spectral indices from multispectral sensor data and the results of automated digital image classifications, is crucial to successful data interpretation.
Differences in time-stamps used between sensors in our study highlighted the need to commit to a time system to use for all data, whether local time, adjustments for daylight savings, or Coordinated Universal Time (UTC) time. Devices should be synchronized to a centralized time server or the GPS system where possible.
4.8. Data Volume
The temporal frequency and spatial resolution at which data are captured by a WSN should be matched to the particular monitoring requirement. For monitoring of pasture status, weekly measurements may be sufficient, per-minute measurements too detailed and monthly measurements too sparse, depending on the application. In agricultural systems, continual monitoring at the daily to weekly time-interval allows changes in the system response to seasonal and agricultural changes to be identified early enough so that management interventions can be timely and cost effective. For example, identifying the break of season in a Mediterranean extensive-grazing system, or the loss in pasture quality during a tropical dry season, which may require changes in stocking rates, moving animals to other pastures, or purchasing feed at favorable prices. There is a trade-off between collecting data frequently enough so that meaningful data aggregation and synthesis is possible, but not so frequently that the large data volumes unnecessarily impede processing times. Future WSN technologies may provide adaptive sampling, whereby the network adapts data capture rates based on the nature of the phenomena being measured [
33].
For passive multispectral sensors in a vegetation monitoring context, the most useful readings are those captured during the middle of the day (e.g., 10 am to 2 pm) or those obtained at times when solar elevation is similar. However additional understanding of the system and environment can be achieved by capturing all available observations, and then performing analyses on selected periods of interest. In our study the sensors operated 24 h a day, and we found that recording and storing the night-time baseline values assisted in the identification of problems with sensor function when they arose. Similarly with digital imagery, we retained all the images captured, but for analysis created a subset of images from daylight hours.
4.9. Data Errors and Faults
In addition to the expected variations in sensor readings resulting from seasonal cycles, erroneous values may arise due to anomalies at the sensor or during data transmission [
7]. Erroneous values identified as part of data quality control can include outliers, spikes, high noise levels, clipping and calibration issues ([
34]). There are many approaches to sensor data cleaning and outlier detection [
35,
36,
37] some of which propose the implementation of data quality control algorithms within the WSN [
7,
38,
39].
Data captured by different types of sensor on the same nodes help in the selection and filtering of data. For example, we used the multispectral sensor data to select digital camera images with the best illumination for the purpose of image classification. Conversely, in our Crace deployment we observed unusually noisy multispectral data and also noticed a link with rainfall events. By examining camera images captured at corresponding times to the rainfall events, we linked the noisy multispectral data with the presence of dew on the vegetation. This combination of sensors enabled us to identify that moisture was affecting the sensors, cable connections and/or communication through the Flecks
®. Szewczyk
et al. [
32] also experienced sensor failure due to moisture, leading to erroneously high or low readings.
The availability of multispectral data in near real-time through the WSN is one area in which WSNs provide significant benefits over non-networked loggers. Missing or unusual data from a WSN can be identified and investigated promptly, whereas with non-networked loggers, long periods may elapse before issues are recognized and resolved.
Other issues may only become apparent in the results of data analysis. For example, the dip we observed in middle of the day NDVI readings (
Figure 3) was caused by shadows from the sensor node itself. This problem was not readily apparent in the raw data readings, and was only clearly evident when the derived NDVI index was calculated from the raw data, and the identification of the issue led to adjustments being made in the node structure. This highlights the need for testing of the entire workflow of all sensors in the system, in addition to monitoring the raw data.
4.10. Cost and Spatial Coverage
In our prototype we were mindful that if such a system were to be deployed on a large scale for vegetation monitoring, each sensor node would need to be relatively low cost. While some of the components of our monitoring system were expensive (e.g., multispectral sensors) there are lower-cost alternatives (e.g., Intor Inc. USA) which could be deployed if the concept is proved effective.
There is also the balance of the cost of sensors compared to the number of sensors to be deployed, such that the environment being monitored is adequately characterized. As these sensors sample only a few square meters on the ground they may not capture the spatial heterogeneity across the pastures. The issue here is not whether the sensors can map the entire footprint of the paddock, as would, for example, a satellite image, but whether the number of sensors used is sufficient to capture the expected spatial variability in the pasture, and make a representative measurement of the pasture status in the paddock. For this purpose it is possible to have a small number of sensors in the paddock, from which results can be aggregated to create a representative value of the pasture at the scale of the paddock or farm management unit.
The number of sensors that are required to adequately capture the spatial variability of the pastures will depend on how variable the pastures are, and how this changes across the season. Within an intensively managed dairy system for example, previous work has shown that these pastures are relatively spatially homogenous [
3]. Tropical pastures are typically more spatially heterogeneous than temperate intensively managed pastures, and in an operational system more than two sensors are likely to be used. Determining the exact number of sensors required is outside the scope of the present study, but for an operational setting could be estimated by using a high-resolution aerial or satellite-derived image to assess the expected heterogeneity in the system.
Of note here is that one of the advantages of the sensors that we have prototyped is that they can be deployed in areas where it is difficult to obtain data on pasture status at the critical times of the year when management decisions are made. Unless ground-based assessments of pasture status are made, the alternative option of acquiring satellite images may not be possible due to seasonally cloudy conditions, and the skills and costs required by a producer or agricultural consultant for accessing, processing, and interpreting such data. Proximal sensing of pasture status, aggregated from a limited number of sensors, therefore provides a potential data source to monitor pastures in situations where no other data may be available. The additional advantage is to have continuous monitoring over time to allow rapid identification of changing conditions, and timely management decision-making.
4.11. Scaling up the Prototype to a Larger System
This prototype system comprised of only two sensor nodes, and we need to be mindful of additional issues that may be encountered if the system were scaled up to be capable of supporting many more nodes. However, a separate deployment which also utilized Fleck® nodes (not described here) has operated successfully with over 170 nodes dispersed over an area of approximately 78 ha. That deployment shows that both wireless network and database capacity issues can be managed successfully, and are not likely to impact a scaled-up version of our current prototype.
Many of the issues we have encountered and overcome in our sensor deployment relate to the design and configuration of the nodes and system. As these issues are resolved (such as through this and further prototyping exercises) they should have minimal impact on future up-scaling of a pasture monitoring sensor network. The problems and potential issues we have identified have reinforced the value of such prototyping prior to implementing a large scale deployment.
5. Conclusions
In this paper we have successfully implemented a prototype system to evaluate the effectiveness of automated sensing using multiple sensors for pasture monitoring. As part of the project we deployed digital cameras, together with a WSN which utilized multispectral sensors, at two different study sites.
The deployment of our prototype system showed that collecting data from multiple sensor types can assist in the diagnosis of problems encountered in operating WSNs for vegetation monitoring. Even though substantial advances in the technological aspects of WSNs can be expected in the future, most of the issues we draw attention to in this paper will remain relevant to deploying and managing a WSN for both pasture monitoring and broader vegetation studies.
We have explored key issues affecting the end-to-end design, setup and operation of a robust multi-node, multi-sensor WSN for the capture, analysis and storage of high-quality data. In doing this, we have identified a number of key requirements and their possible impacts on the success of a WSN deployment for pasture monitoring (
Table 1). Some of the lessons learned and reported here may appear minor, however in our experience there is such a broad suite of challenges which affect the collection of useful data, that they can be readily overlooked. Further, given the relatively immature status of WSN use for both pasture monitoring and broader vegetation applications, the lessons from our prototype system can provide important insights for new deployments by other practitioners.
We have also described how data from sensors with different spatial and temporal characteristics could provide complementary information to assist in the diagnosis of technical issues. A valuable learning relevant to the use of multiple sensors in a WSN is that due to the wide range of factors affecting data capture and quality, validation of the entire workflow should be performed early and regularly to ensure that data of appropriate quality is being captured.
Corke
et al. [
25] presented the view that ‘WSN technology has followed a hype cycle’ where early adopters became disillusioned, but that the field has since entered the ‘slope of enlightenment’ in which WSN technologies are expected to improve. There is a great potential for the use of multiple proximal sensors within a WSN for pasture monitoring, particularly with future advances such as improved sensor integration, network reliability, power management and increased capabilities at a lower cost. Despite these technical advances, we argue that the issues highlighted in this paper will remain relevant when deploying and managing a WSN for vegetation studies.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}