2.2. Monitoring System: Hardware, Sensors
The monitoring system is developed to study the operation modes of the rural house heating system. For a complete analysis of the operation of the HPI, it is necessary to simultaneously monitor many operating parameters. In addition, it is required to monitor in real time such resulting parameters as the heat output and coefficient of performance (COP) of the installation. These parameters cannot be measured directly, but can only be calculated on the basis of other data. In this regard, a special system is developed for monitoring the operation parameters of the heat pump installation with the possibility of obtaining the values of performance indicators and work efficiency in real time.
The monitoring system is built on the basis of an analog-to-digital converter (ADC) L-Card E-154 with eight single-phase inputs with a common ground formed by switching input lines using an electronic switch. Despite the low cost, (lower than almost all industrial analog input modules), it has sufficient 12-bit resolution (4096 quantization levels), maximum conversion frequency 120 kHz, accuracy ±0.1% in the range of ±5 V. It is a full-featured laboratory measuring device, unlike, for example, Arduino boards, which are capable of playing the role of an ADC. However, due to the non-standard nature of the task, it is accomplished according to our developed original scheme and involves a special data processing algorithm using the plugin for a personal computer written for this purpose.
In order to calculate the COP value of HPI, it is necessary to determine the generated heat flow
and the consumed electric power
and then find their ratio, which is the standard calculation formula for COP of heat pumps:
Measurement of electric power is not difficult and there are many meters of various accuracy classes for this purpose. In our case, we use an electronic meter of electric power and spent electricity Mercuriy 200.1 with a pulse output and an accuracy of ±1.5%.
The method for determining heat production depends on the heat power installation scheme, namely, on the presence or absence of intermediate heat carrier circuits. Heat pumps without such circuits are not considered for the organization of the described monitoring system. In the case of the presence of a liquid circuit for the distribution of generated heat, it is possible to determine the generation
with fairly high accuracy by measuring the temperature of the heat carrier at the inlet
and outlet
of the heat pump condenser and the mass flow rate
of the heat carrier:
where
is the specific heat capacity of the high temperature heat carrier.
In the case of a water-to-air heat pump, it is not possible to directly measure the output using the available measuring instruments, but it is possible to calculate it based on the magnitude of the extracted flux of low-grade heat. Heat pumps of such types are generally located in technical rooms inside heated objects. In this case all losses during the operation of the heat pump will go to heating the building. Therefore, they cannot be considered as losses, but can be considered as a part of heat generation. From the foregoing, it can be argued that for heat pumps placed inside a heated object, the capacity of the generated heat can be taken equal to the sum of the extracted low-grade heat flux
and the consumed electric power
:
where
is the specific heat capacity of the low temperature heat carrier,
is the mass flow rate of the heat carrier in a low temperature circuit,
and
are temperatures of the heat carrier at the inlet and outlet of an evaporator.
In this case, it is necessary to provide the monitoring of extracted low-grade heat flux by means of temperature sensors at the heat carrier inlet and outlet of the evaporator as well as heat carrier flow sensor.
In addition to the sensors for calculating power, heat fluxes, and COP, for more deep analysis of HPIs operation, sensors in the freon circuit of a heat pump, sensors for air temperature and other media, as well as some others, are also required. It was decided not to use expensive freon pressure sensors in the monitoring system, since in most cases the information about the temperature of freon is sufficient.
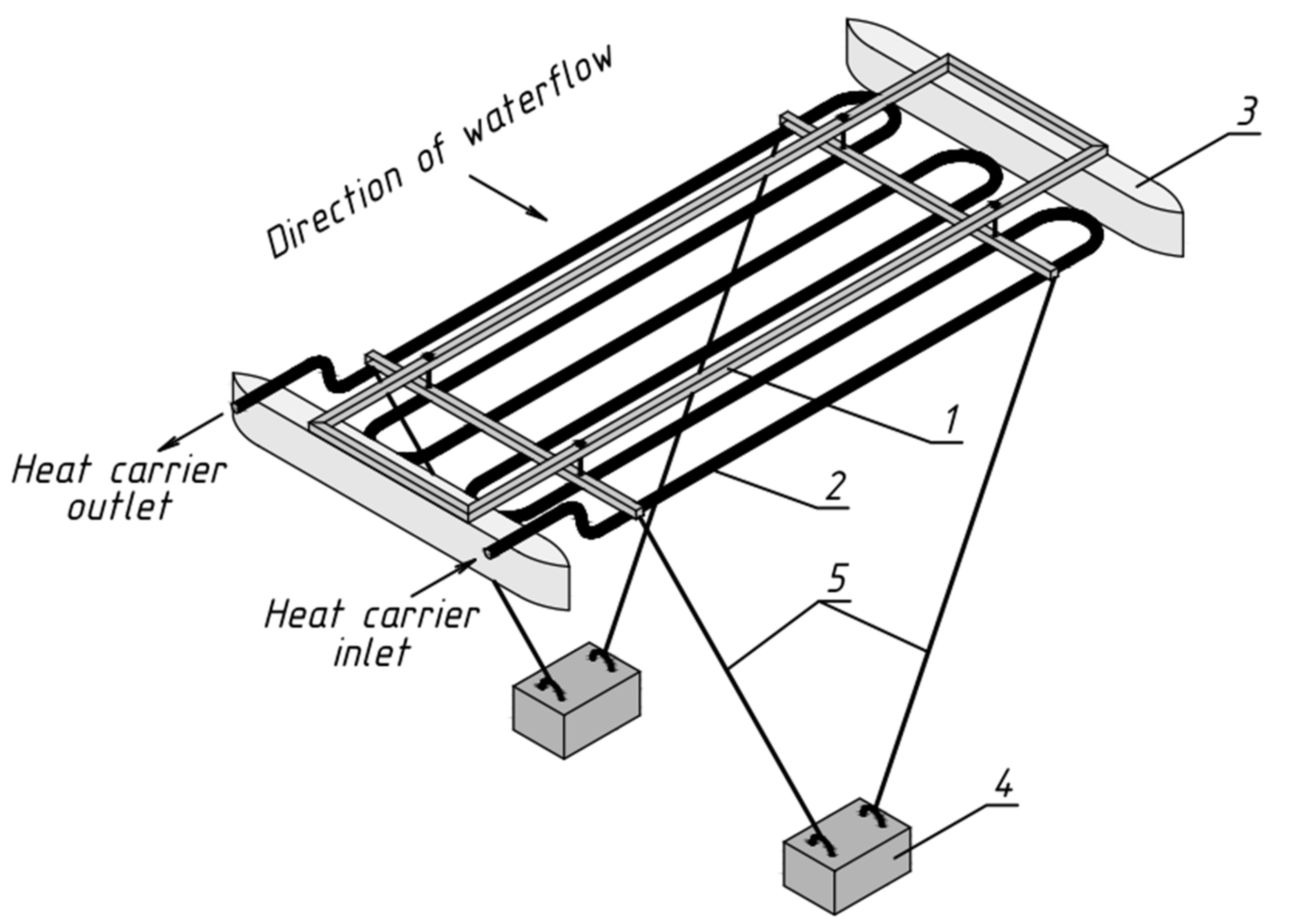
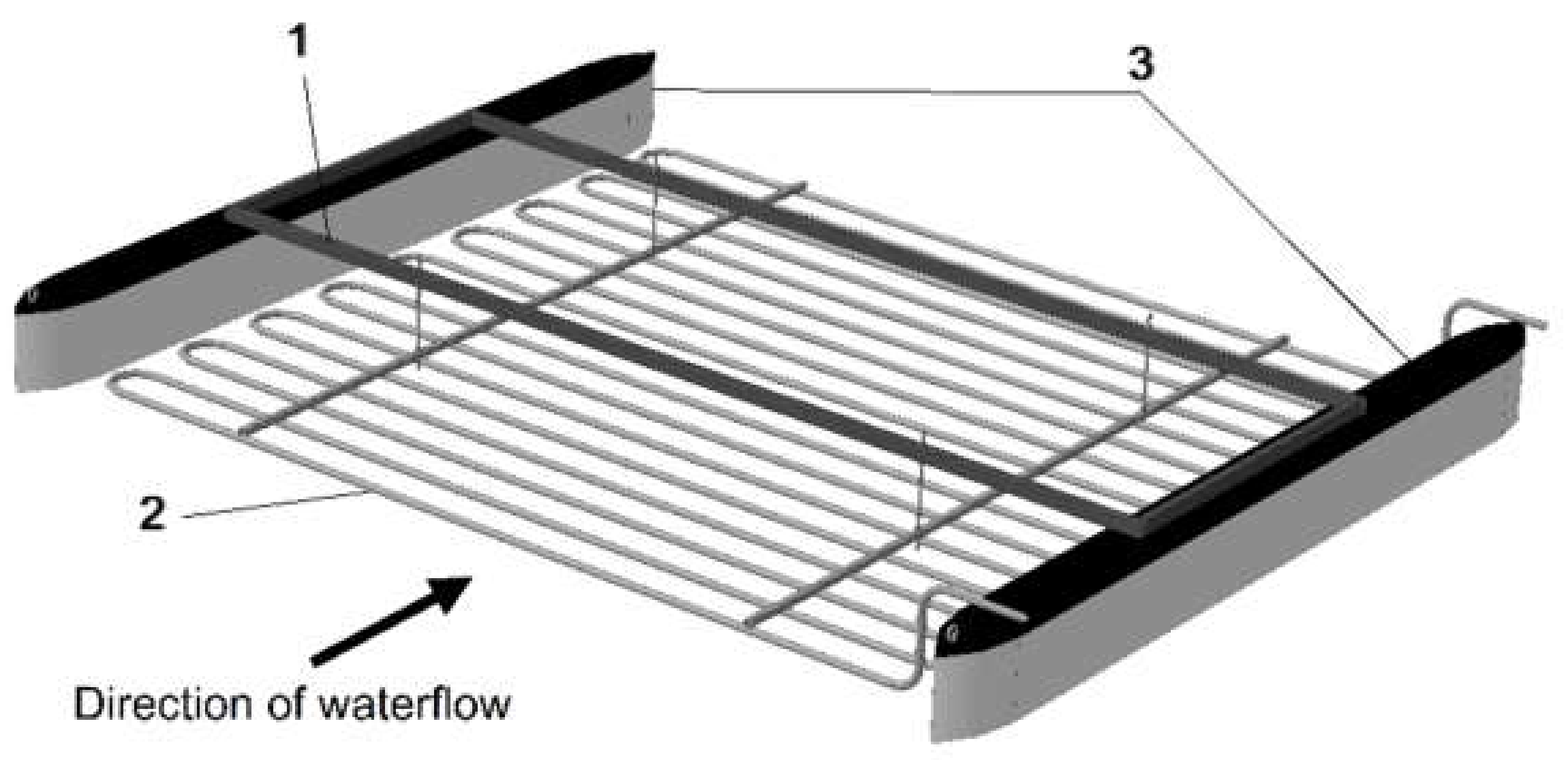
The monitoring system is organized to analyze the operation of the described water-to-air HPI based on an inverter heat pump using low-grade heat of the watercourse. Recall that in such an installation there is an intermediate heat carrier circuit for low-grade heat extraction, and the generated heat is transferred directly to the air. For such a case, the following set of parameters is determined, the measurement of which the monitoring system is supposed to provide:
- -
temperature of a low-grade heat source (water in a watercourse);
- -
temperature of the heat carrier at the entrance to the low-grade heat extraction site (at the entrance to the submersible heat exchanger);
- -
temperature of the heat carrier at the outlet of the low-grade heat extraction site (at the outlet of the submersible heat exchanger);
- -
temperature of the heat carrier at the inlet to the heat pump evaporator;
- -
heat carrier temperature at the outlet of the heat pump evaporator;
- -
heat carrier flow rate;
- -
temperature of freon at the entrance to the evaporator;
- -
temperature of freon at the outlet of the evaporator;
- -
temperature of freon at the inlet to the condenser;
- -
temperature of freon at the outlet of the condenser;
- -
air temperature at the inlet to the condenser;
- -
air temperature at the outlet of the condenser;
- -
electric power consumed by the heat pump;
- -
rotational speed of the inverter heat pump compressor.
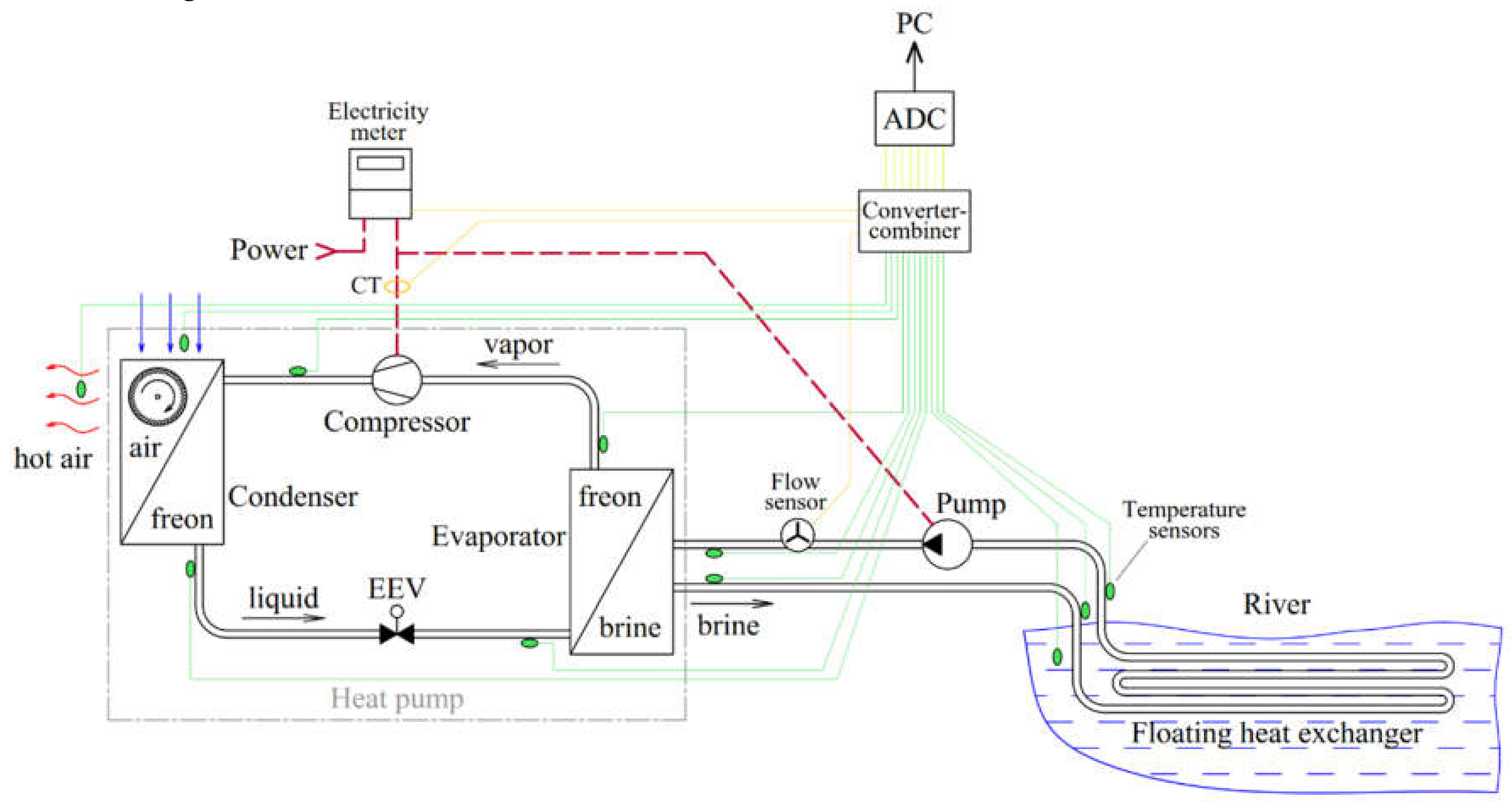
Temperature sensors near the submersible heat exchanger and in a watercourse are needed to assess the efficiency of the heat exchanger. Information about the freon temperature at the evaporator inlet and outlet is necessary to determine the evaporation temperature and to control the completeness of evaporation. Air and freon temperature sensors near the condenser are required to account for the effects of room air temperature and condensation temperature. In other cases, depending on the complexity of the research task, the number of sensors can be both smaller and larger.
In
Figure 4 schematic diagram of the HPI and the monitoring system with the location of the sensors are given.
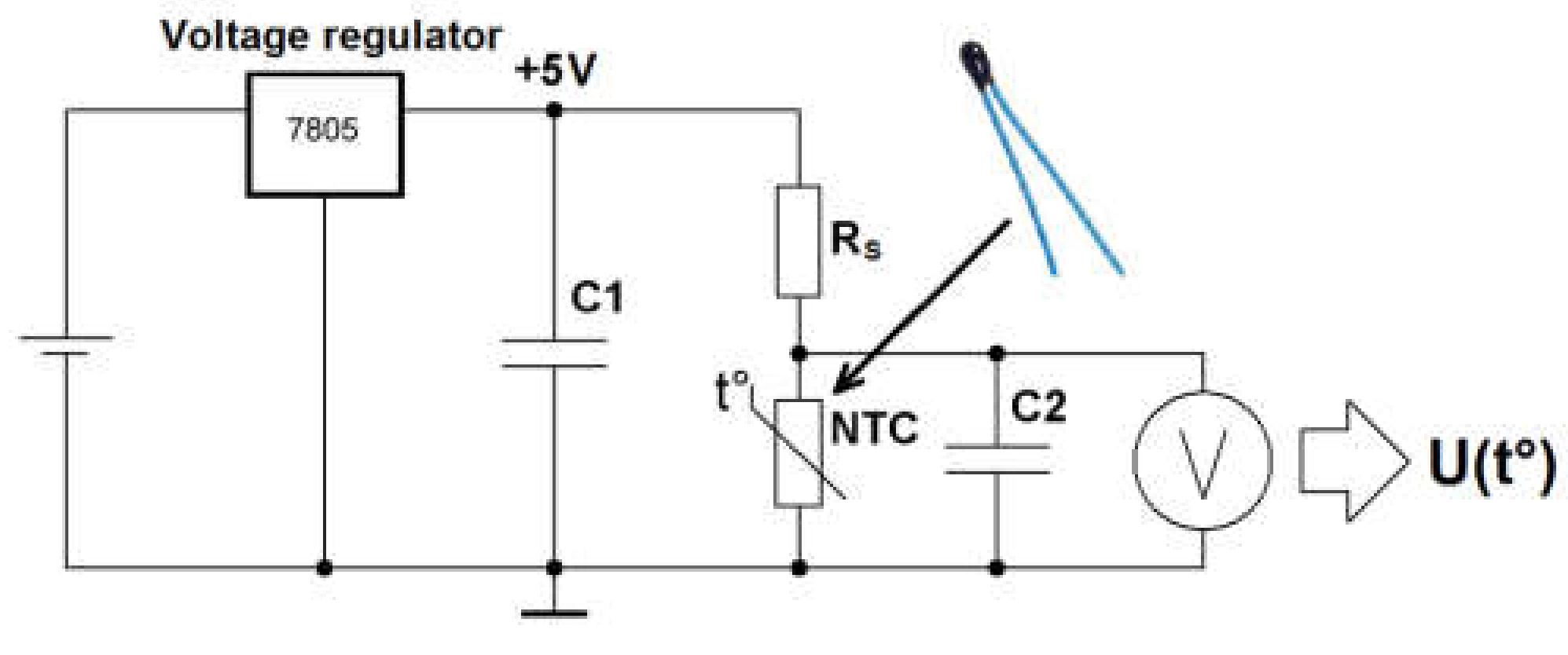
The temperature is measured using thermistors connected according to the scheme of the resistive voltage divider shown in
Figure 5.
The capacitor C2 is needed for filtering impulse interference and is installed in the immediate vicinity of the ADC input, as significant interference can occur on long connecting wires, especially on unshielded ones. The optimum capacitance should be selected on a case-by-case basis. A capacitor with a large capacity filters out interference well, but the system’s response to temperature changes slows down.
In our monitoring system, we use high-precision NTC thermistors of the B57861-S/B57871-S type with a resistance of 10 kOhms with a tolerance of 1%. The high accuracy of temperature measurement is especially important when calculating the heat flux supplied to or removed from the heat carrier. So, in the case of using a heat carrier with a heat capacity of 3000 W/m∙K at a flow rate of 0.2 kg/s, every 0.1 K of the difference in the temperature of the inlet and outlet of the heat carrier corresponds to supplied or removed heat flux of 60 W. It is possible to achieve a sufficiently high accuracy of measuring these indicators in the system: the temperature difference between the readings of the sensors at the inlet and outlet of the heat exchanger during calibration process without heat transfer is kept below 0.05 K (generally 0.01–0.02 K).
The relatively high resistance of the selected thermistors (instead of the often used metallic thermoresistor with resistances of the order of 100 Ohms) allows us to provide sufficient accuracy in measuring the air temperature without significantly affecting the heating of the thermistor from the current flowing through it, since at the same applied voltage the heat release is inversely proportional to the resistance. So, at a temperature of 25 °C, the resistance of the thermistor of the selected type is 10 kOhm, the voltage on it in the used circuit with a voltage divider is eventually set to 0.45 V, and the heat generation according to Joule-Lenz law is:
In addition, such high resistances significantly exceed the resistance of the connection wires. This allows the use of a two-wire sensor instead of a four-wire sensor connection (two wires for current supply and two for voltage drop measurement) without significant influence of wire resistance on measurement accuracy.
Parameters characterizing the intensity of the processes, such as electric power, mass or volumetric flow rate of substances and rotor speed, are usually measured by devices that output a pulsed or frequency signal with a characteristic frequency proportional to the measured value. Wattmeters and meters for measuring electrical energy in most cases have galvanically isolated pulse outputs through an optotransistor with a period between short-term pulses inversely proportional to the measured electrical power.
The fluid flow sensors YF-S201 used in the system for measuring the flow of heat carrier are impellers with an annular magnet rotating near the Hall sensor. Such a flow sensor is characterized by a low price, but requires preliminary calibration using trusted measuring instruments (accuracy ±5%). The sensor gives an output square-shaped frequency signal with a frequency proportional to the flow rate.
In an HPI with an inverter-type heat pump, it is required to register the compressor speed. To do this, it is enough to measure the frequency of the current on the compressor power line, for which a current transformer (CT) installed on one of the compressor power wires is used.
Both described sensors in the system under consideration give an output of a frequency signal with frequencies of the order of 20–200 Hz. In addition, sensors with a higher frequency signal can be included in the system. For example, our system temporarily used a signal from a fan motor feedback output with a frequency of up to 440 Hz. A simple ADC, unlike some microcontrollers, does not have a hardware interrupt function, i.e., cannot instantly record the moment of a sharp change in input voltage (arrival or completion of a pulse), but can only measure input voltage with a given frequency. Therefore, a significantly higher sampling frequency of the inputs (several times larger than the maximum signal frequency) is required in order to minimize the delay between the change in the input voltage and the moment of its measurement. The high frequency of measurements will create an excess data stream and create a significant load on the computer. In this regard such signals must be converted at first.
From this point of view, pulsed signals are preferable, upon registration of which it is sufficient to determine only the time interval between relatively rare pulses. In this case, the absolute value of the voltage on the channel does not play a role, therefore, it is irrational to allocate a separate ADC channel only for registering pulse signals from one sensor. In addition, the incoming pulses can be very short-lived: their duration can be changed by means of simple circuitry and reduced down to the minimum recorded ADC values.
Short-term pulses arriving at intervals measured in seconds can in some way be applied to the ADC inputs used to measure slowly varying absolute values of voltage from other non-pulse sensors (for example, temperature) and can be extracted using a program algorithm without any significant effect on the readings obtained with non-pulse sensor.
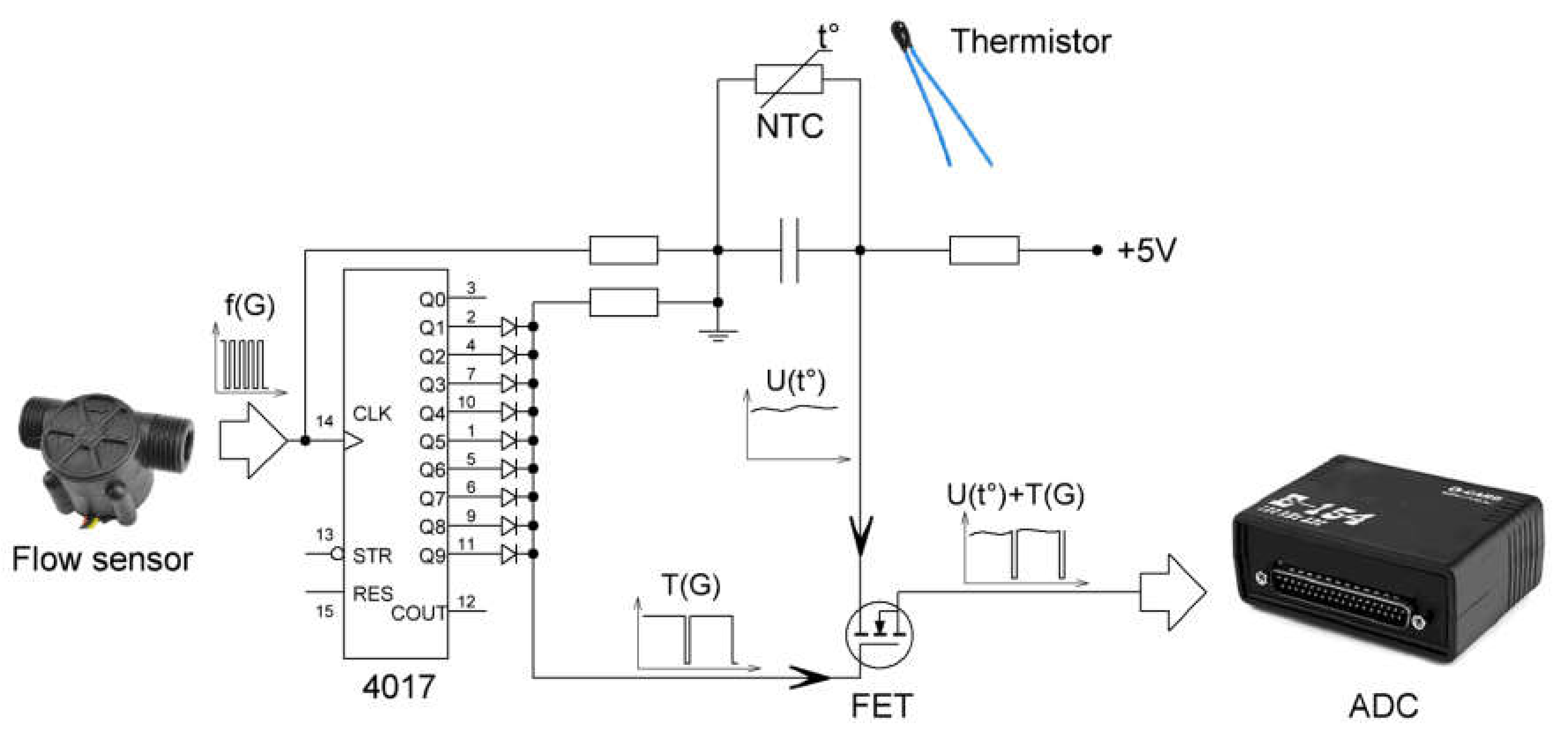
In connection with the described advantages of pulse signals, it was decided to convert the obtained frequency signals (from flow sensors, compressor speed sensor, etc.) to pulse ones. For this purpose, converters based on integrated counters/frequency dividers 4017 (CD4017/HCF4017) are assembled. The chip mentioned above allows you to divide the frequency of the original signal by 10 and change the duty cycle to 0.1. Depending on the frequency of the source signal, one-, two- or three-stage converters can be organized on this chip.
The scheme of sensors connection to one ADC input is shown in
Figure 6.
A high-level signal arriving during the pulse causes a voltage drop across the gate of the field-effect transistor (FET), through which a signal is supplied from a non-pulse sensor (thermistor, in this case). As a result, the transistor closes, and due to the characteristics of the selected FET at the drain and, accordingly, at the input of the ADC, a sharp drop in voltage occurs, which is subsequently detected by the plugin as a new pulse. Subsequent software signal processing does not take into account the short-term absence of the signal from the thermistor in the temperature readings. Instead, the last recorded readings are displayed.
In the intervals between pulses, the voltage at the gate is restored, the transistor comes in the open state and the voltage from the thermistor is supplied to the ADC input. Given the almost complete absence of the current through the ADC inputs and, accordingly, the transistor, the open channel resistance of the transistor does not affect the measurement. The use of transistors with an isolated gate ensures that the gate voltage does not affect the voltage at the ADC input.
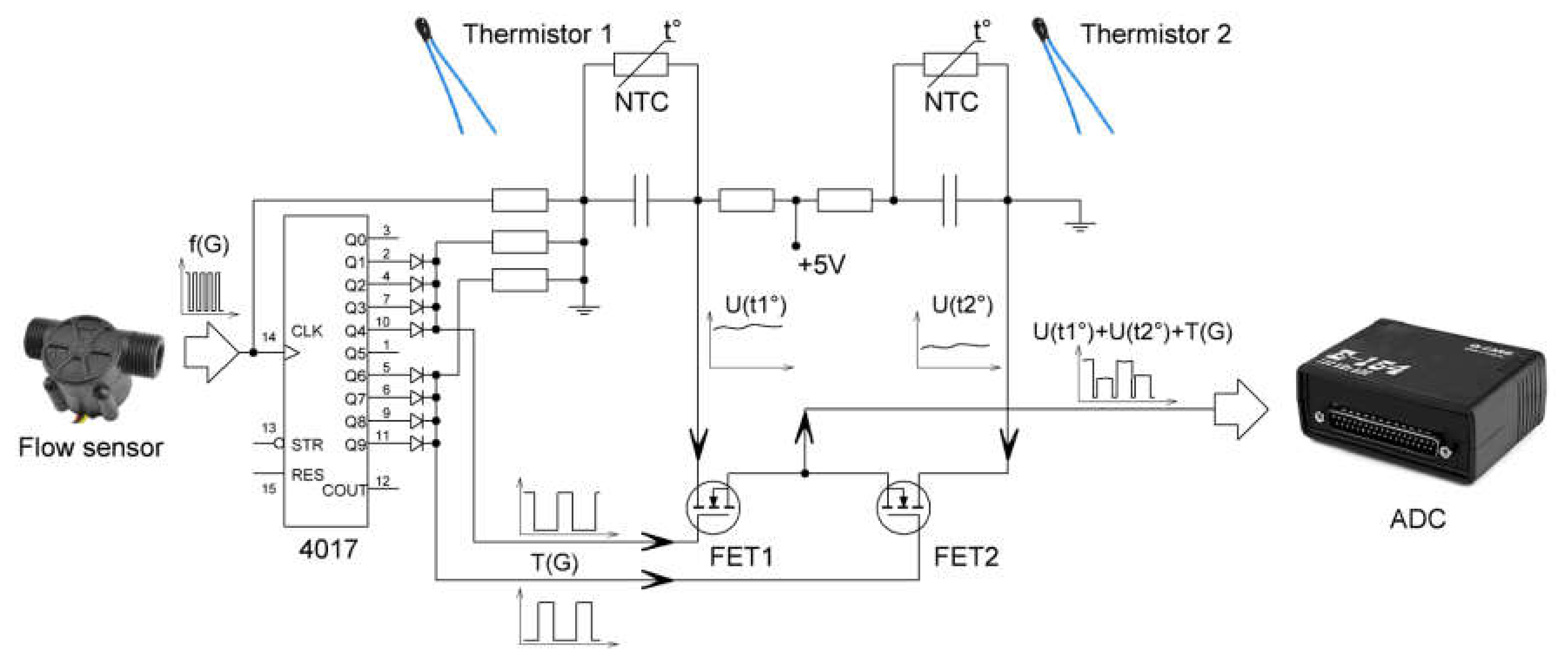
In order to be able to connect a larger number of sensors to a limited number of ADC inputs, a suitable circuit is developed. It has alternating supply of signals from several non-pulse sensors to one ADC input with separation by pulses from a 4017 chip, which converts the signal from a sensor with a frequency output. In this scheme, each non-pulse sensor is connected to the ADC input through a separate FET, the gates of which are connected to different groups of joint chip outputs (
Figure 7).
In practice, the implementation of such a circuit with more than two non-pulse sensors connected to one ADC input causes difficulties, since it is problematic to process the combined signal from such a circuit to compare individual signals with specific sensors. In addition, the duration of registration of a signal from each non-pulse sensor is significantly less than the time of absence of a signal from an individual sensor. Therefore, it is possible to connect a maximum of two non-pulse sensors, the signals from which are alternated and separated by pulses from the 4017 chip.
To avoid false triggering of the counter, it is necessary to filter out impulse noise in the signal from a sensor with pulse output. A simple RC-filter (resistor + capacitor) is used for this purpose. In
Figure 6 and
Figure 7 filter elements at the input of the 4017 chip are not shown.
2.3. Monitoring System: Software
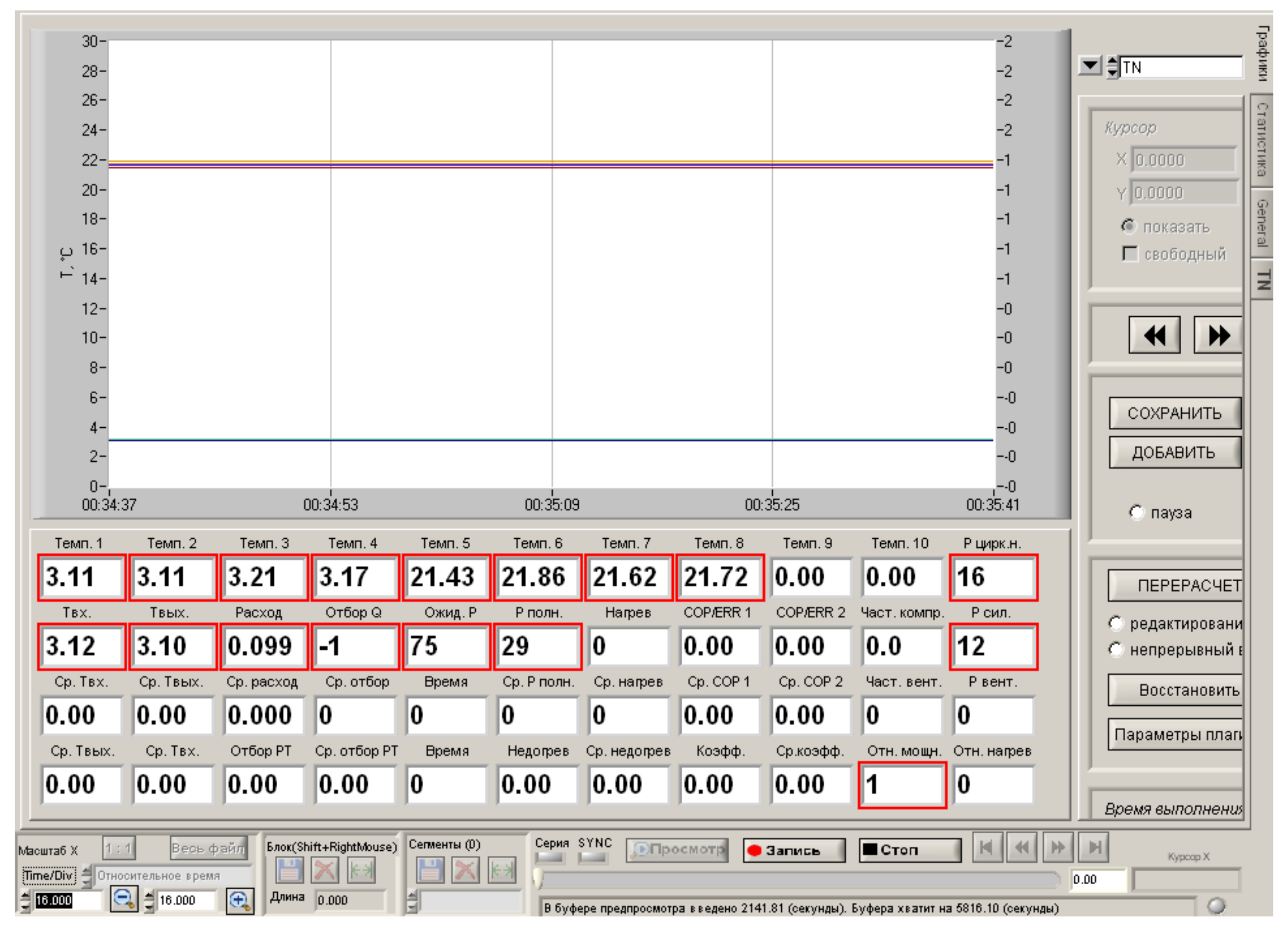
The plugin window in the process of monitoring the parameters of the HPI operation in two forms (in the mode of displaying temperature graphs and in the mode of displaying the table of registered steady-state operating modes) is shown in
Figure 8 and
Figure 9. The window in real time displays all the measured and calculated parameters of the HPI.
Incoming digitized readings from temperature sensors initially pass software interference filtering. The Kalman filter algorithm is used for this purpose.
The main task of the plugin is to process signals from various sensors to obtain measured values. The signal from the temperature sensors is the voltage on the thermistor, which is a part of the voltage divider. Based on the obtained voltage value, the resistance of the thermistor is calculated, after which the temperature is determined based on the temperature-resistance dependence known for the thermistor. Thermistor characteristic is usually provided by manufacturer in form of table. To be used in the calculation, it must first be converted to a function
. The Steinhart–Hart equation is used for this purpose:
where
,
and
are the coefficients,
is the thermistor resistance at temperature
(K). Coefficients are determined by solving a system of three equations for any three table points in the temperature region of interest. For used thermistors B57861-S/B57871-S, coefficients for the region of 258–343 K (−15–70 °C) are determined and the following relationship is obtained:
where
is the thermistor resistance, kOhm. Approximation accuracy for region 258—343 K:
,
.
Based on connection diagram (
Figure 5) thermistor resistance can be calculated by the following formula:
where
is the resistance of the thermistor,
is the resistance of the paired resistor in the voltage divider,
is the measured voltage and
is the reference voltage (4.95 V).
Functions are directly entered into the plugin code. If various types of thermistors with different characteristics are used in the system, it is stipulated the possibility to add many dependencies to the plugin code, followed by selecting the necessary dependencies in the settings of individual sensors.
In the case of signals from sensors with a pulse output, in order to calculate the value of the measured parameter, it is necessary to measure the time interval between the arrivals of the pulses and to determine the desired value using the dependence entered in advance for a particular type of sensor. The same is applied to sensors with a frequency output, the signal from which is converted to a pulse using converters on 4017 chip. In this case, the division (thinning) coefficients of the converter for a particular sensor are taken into account.
However, since the allocation of a separate ADC channel for a pulse channel only is irrational, the plugin considers a circuit with the supply of pulse signals to the inputs involved in measuring absolute voltage values from non-pulse sensors. The possibility of processing combined signals for two options for joint connection to one ADC input is implemented:
- -
one non-pulse sensor and one meter with a pulse output, or with a frequency output and connection through a converter on a 4017 chip;
- -
two non-pulse sensors and one meter with a frequency output, connected through a converter on the 4017 chip.
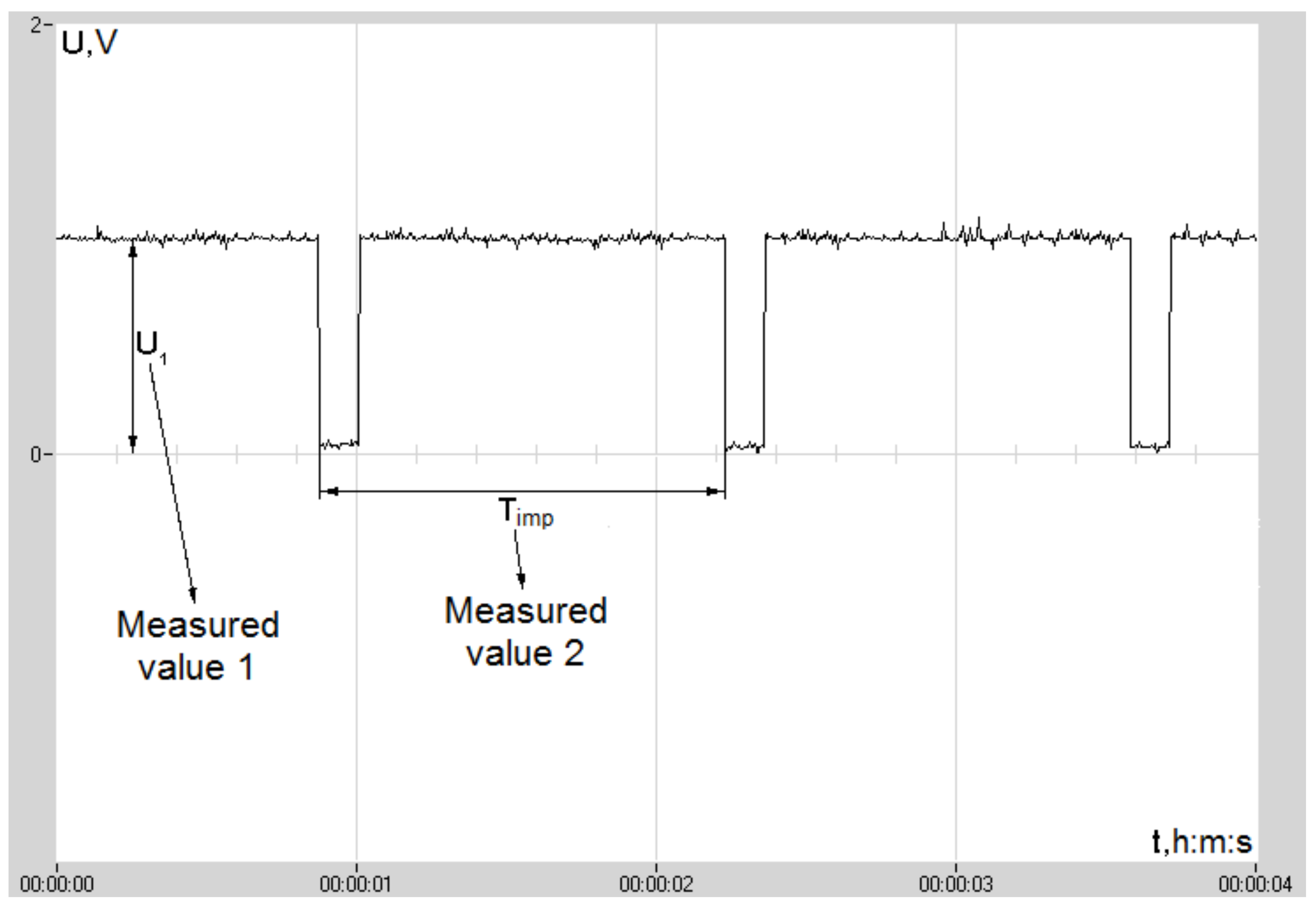
With the described scheme of sensors’ joint connection, pulse signals from the corresponding sensors, as well as frequency signals after their conversion to pulse, are recorded by the ADC as voltage dips at the inputs of a certain duration (
Figure 10).
Over the duration of the pulse, which is usually from several tens to several hundred milliseconds, it is impossible to measure the value from a temperature or other non-pulse sensor connected to the same ADC input. However, taking into account the low rate of change of the analog values measured on the corresponding channels (it is recommended to send signals from temperature sensors to the considered channels, since the signal from them cannot change quickly), the analog value cannot change significantly for the indicated fractions of a second of signal absence. In this regard, during the pulse, until the voltage is restored from the non-pulse sensor, for display on the screen and in the file, as well as for calculating the values of other parameters, the last measured analog value is used.
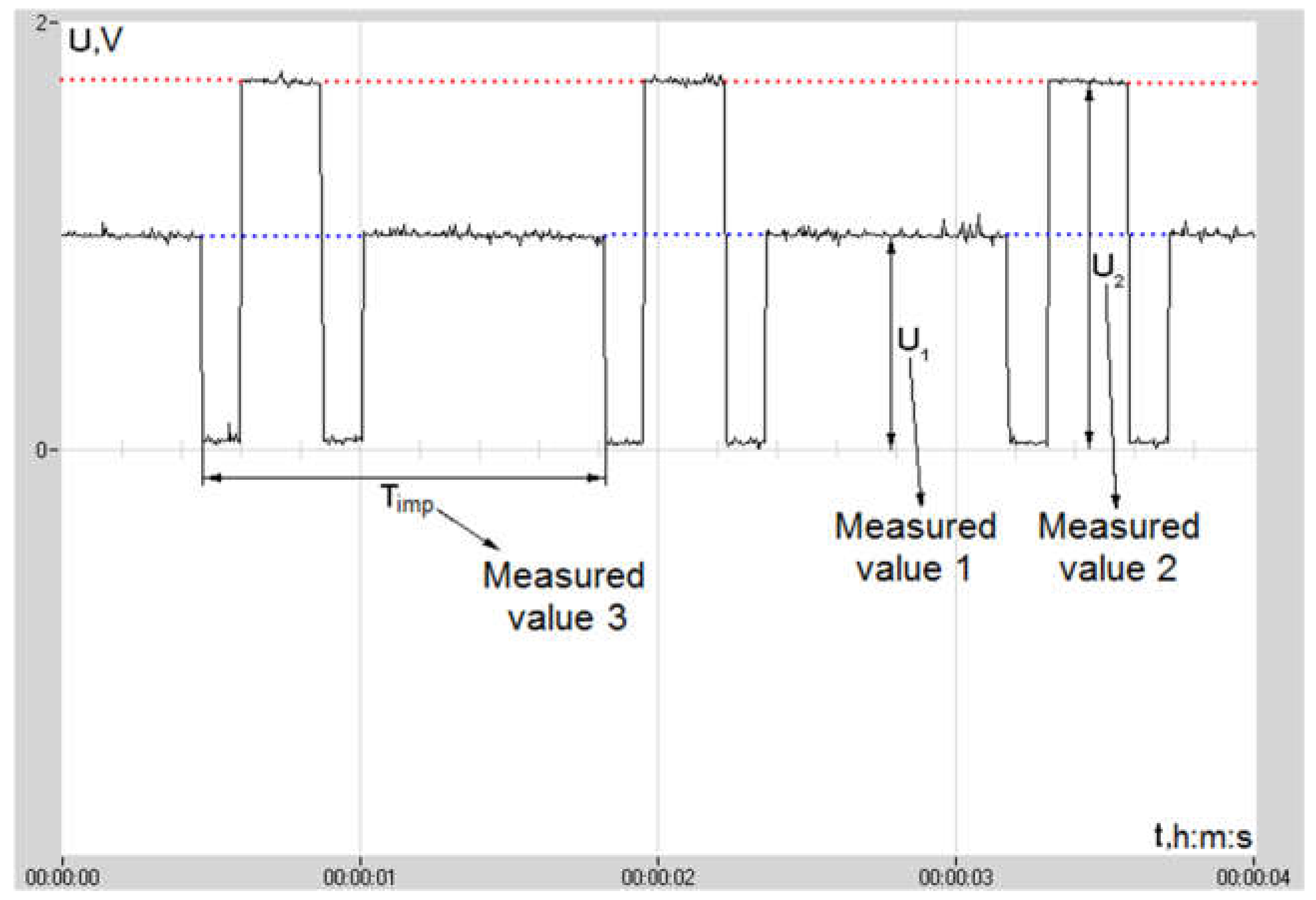
In the case of applying rolling signals from two non-pulse sensors to one ADC input, as in the previous case, the pulses are recorded by the ADC as voltage dips at the inputs of a certain duration. The duration of the signals from the first and second the non-pulse sensor may vary depending on the choice of outputs of the counter chip, from which the separation pulses are taken. When calculating the pulse value, the full period is taken into account, that is, the interval between every second pulse (
Figure 11).
The principle of operation of the processing algorithms is similar in both cases, however, in the case of two non-pulse sensors, the algorithm is organized in a more complex way due to the need to identify and compare alternating signals from two different non-pulse sensors. A higher-level analog signal is detected and attributed to the sensor, the signal from which must obviously be higher, and a lower-level signal is respectively attributed to another sensor. Wherein, the last value recorded before the arrival of the separation pulse is stored and used to display on the screen and to the file, as well as to calculate the values of other parameters throughout the time the signal from the corresponding sensor is absent.
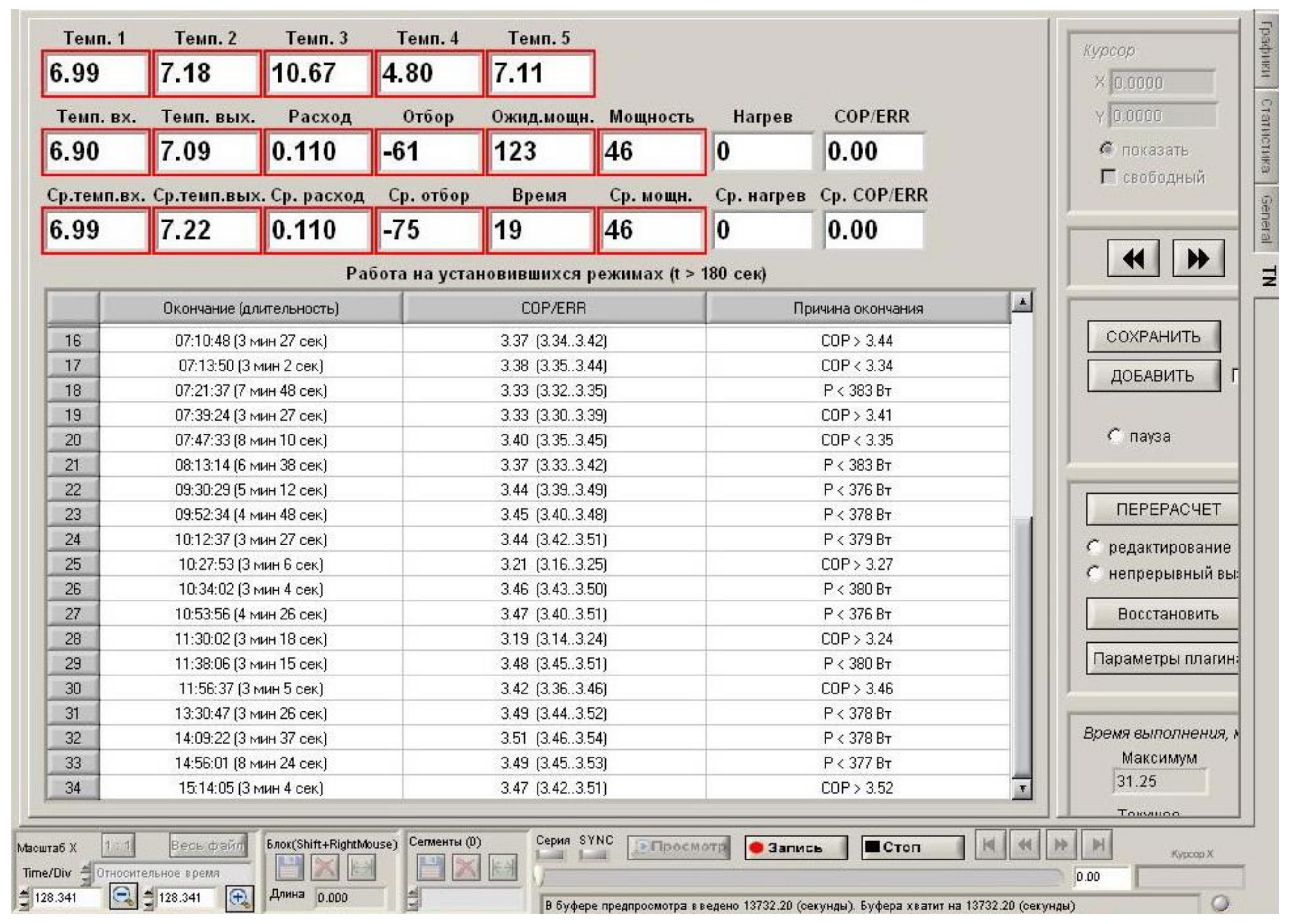
In addition, in the plugin it is implemented an algorithm for diagnosing steady-state heat pump operation modes. HPI with an extended intermediate heat carrier circuit and a large volume of heat carrier in it has a significant inertia and any targeted change in an initial parameter or an operator-independent significant change in conditions is accompanied by a long (from several minutes to tens of minutes) transient process, in most cases not representing interest for analysis. To study the influence of various parameters on the installation efficiency, it is required to determine the average performance and efficiency indicators over the long-term steady-state operation modes, accompanied by only a slight fluctuation in the values.
In this regard, it was important to ensure that the monitoring system automatically with accordance to the set criteria identified such established operating modes and collected data on them in a separate table (file).
The algorithm monitors changes in the following parameters:
- -
temperature of the inlet and outlet of the heat carrier in the heat exchanger-evaporator;
- -
heat carrier flow rate;
- -
compressor rotation speed;
- -
electric power;
- -
COP.
For each of these parameters, the values of possible deviations are set in the plugin code. A steady-state operation mode is considered to be such a period of operation of the installation during which none of the specified parameters goes beyond the set tolerances of the deviation and the duration of which is not less than the value specified in the settings.
During the steady-state operation mode, the average values of all parameters are calculated. The accumulated data for the periods of steady operation (average values of the parameters and the duration of the mode) are recorded in a separate file. In addition, the duration of the mode, the average value of COP over it, and the reason for the end of the steady state are displayed as a table row in the plugin window.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












