On the Use of Cameras for the Detection of Critical Events in Sensors-Based Emergency Alerting Systems





Abstract
:1. Introduction
- Exploitation of scalar and visual sensors to detect emergencies in a combined way, employing for that a unified processing, storage and communication structure;
- Definition of two different types of events, instance and complex, which have different impacts when computing the severity level of an emergency alarm;
- A reference implementation for combined sensing using both scalar and visual sensors, which is ready to be used and available at a public repository (https://github.com/lablara/cityalarmcamera.git);
- A comprehensive discussion about failure conditions and practical implementation issues when detecting emergencies in smart cities.
2. Related Works
3. Fundamentals of Emergency Alerting
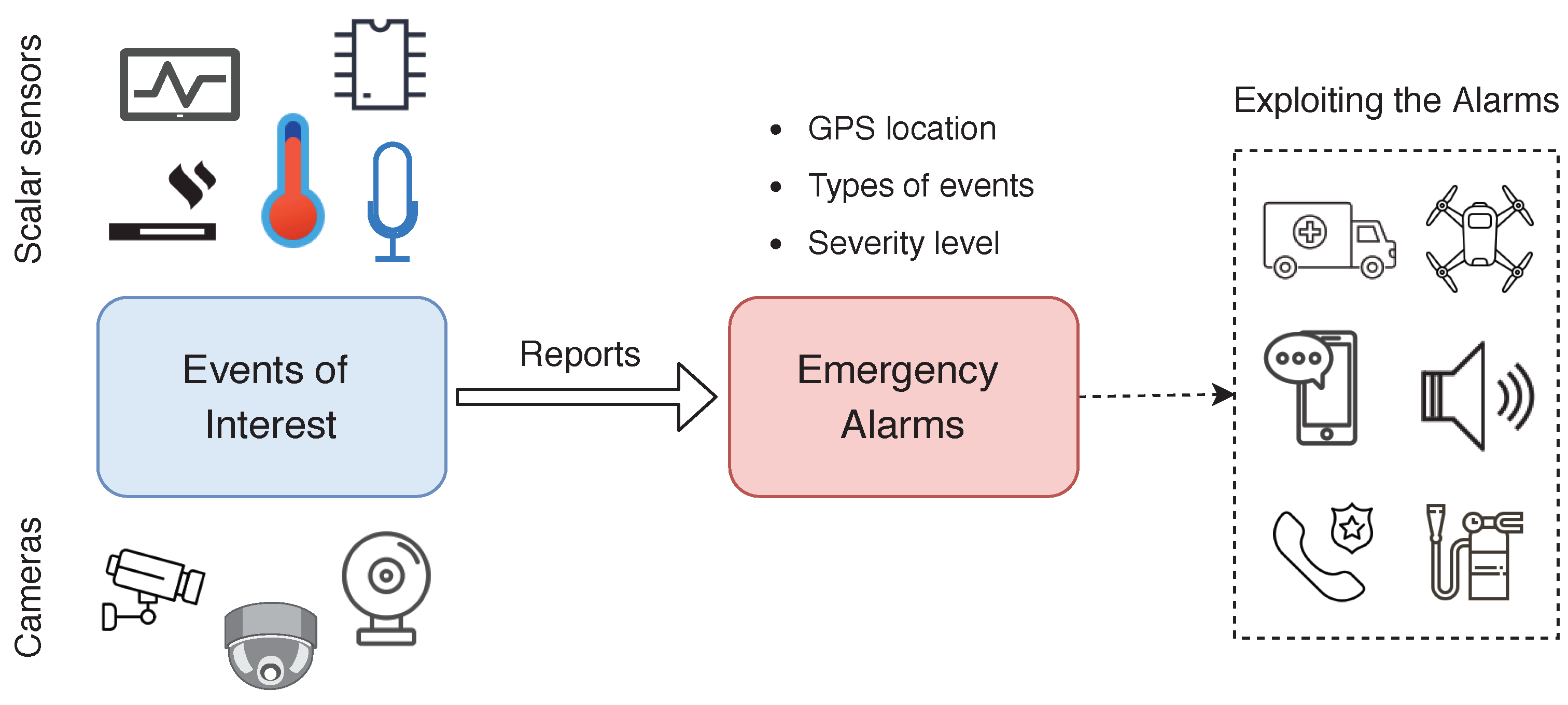
- Events of Interest: This is the fundamental concept when alerting about emergencies. An emergency happens when at least one event is detected, while an event is only detected when a measurable variable is above or bellow a given (configurable) threshold. In ref. [7], all events are detected through a scalar measure, but we propose to extend that behavior to include events that can be detected by cameras, defining new levels of events.
- Events Reports: An emergency may be associated with one or more events, and the number of detected events within a defined period of time is a relevant parameter when computing the potential of damage (severity level) of any emergency. When considering the use of cameras, the Events Reports, which are transmitted from the EDUs, may be adapted to accommodate this information.
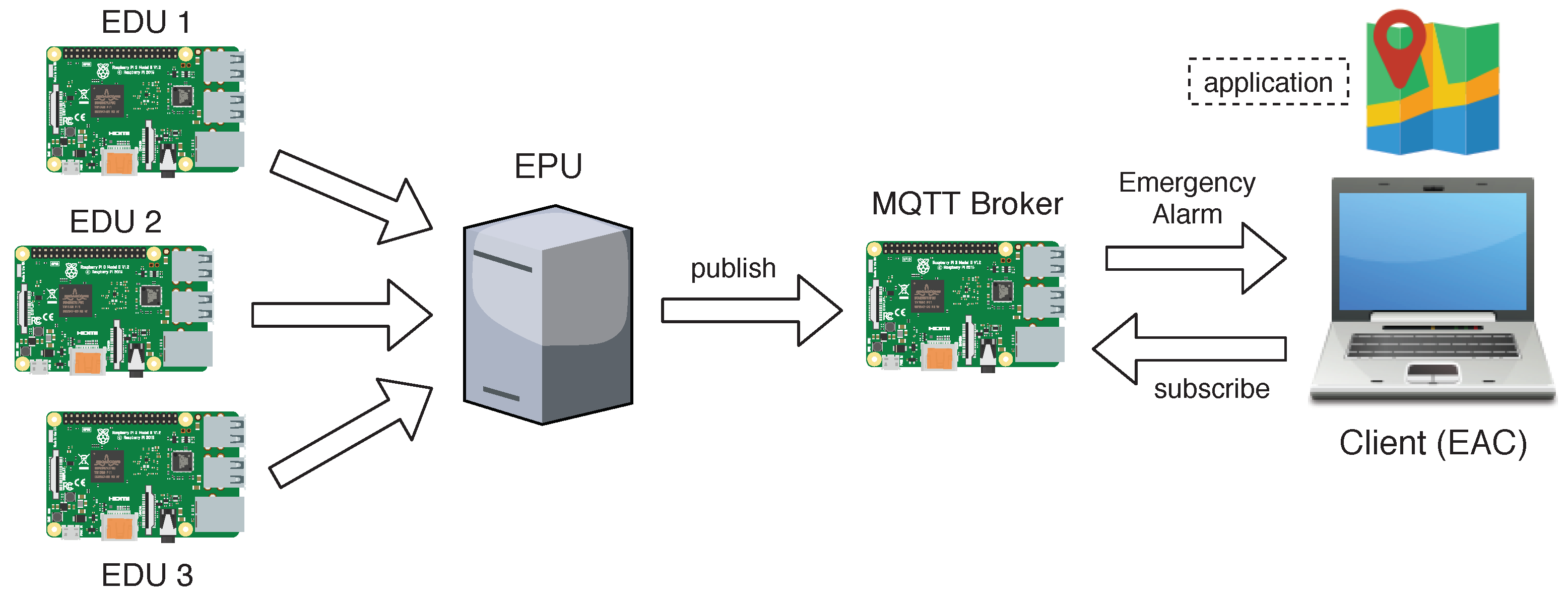
- Emergency Alarms: The alarms are issued by an Emergencies Processor Unit (EPU) that computes the severity level of each alarm based on temporal and spatial information. When using cameras in the EDUs, the EPUs may employ a different algorithm when computing the severity of the alarms, in accordance with the proposals in this article.
4. Proposed Approach
4.1. Visual Data Processing
4.2. Detecting Events and Sending Reports
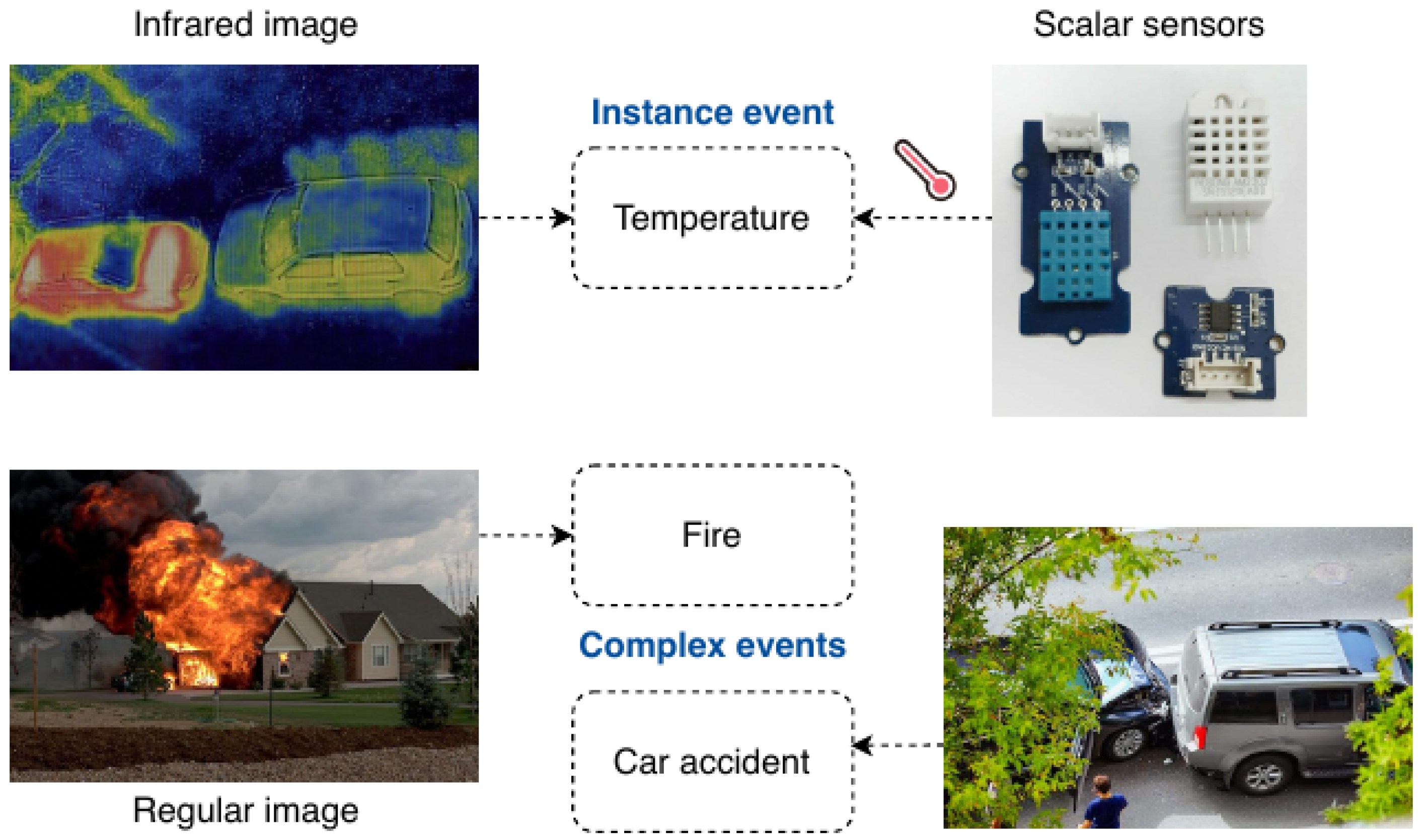
- Instance Events: They can be detected by both scalar and visual sensors. The defining characteristic of an instance event is that it is directly detected only employing a single numerical threshold. Each scalar sensor can detect one or more instance events and the same is true for visual sensors. Infrared/thermal images are examples of visual data that can be processed to identify instance events;
- Complex Events: They are supposed to be detected only by visual sensors since they are not associated to numerical thresholds. The detection of complex events is performed by the processing of visual data through computer vision algorithms, which must to be configured to detect critical situations, such as Fire, Smoking, Flooding, Accident, among other events-related emergencies.
| { |
| "edu": "u", |
| "id": "i", |
| "timestamp": "ts", |
| "gps": { |
| "latitude": "la", |
| "longitude": "lo" |
| }, |
| "ei": [ |
| y1, |
| y2 |
| ], |
| "ec": [ |
| w1 |
| ] |
| } |
4.3. Computing the Severity Level When Employing Cameras
5. Experiments and Results
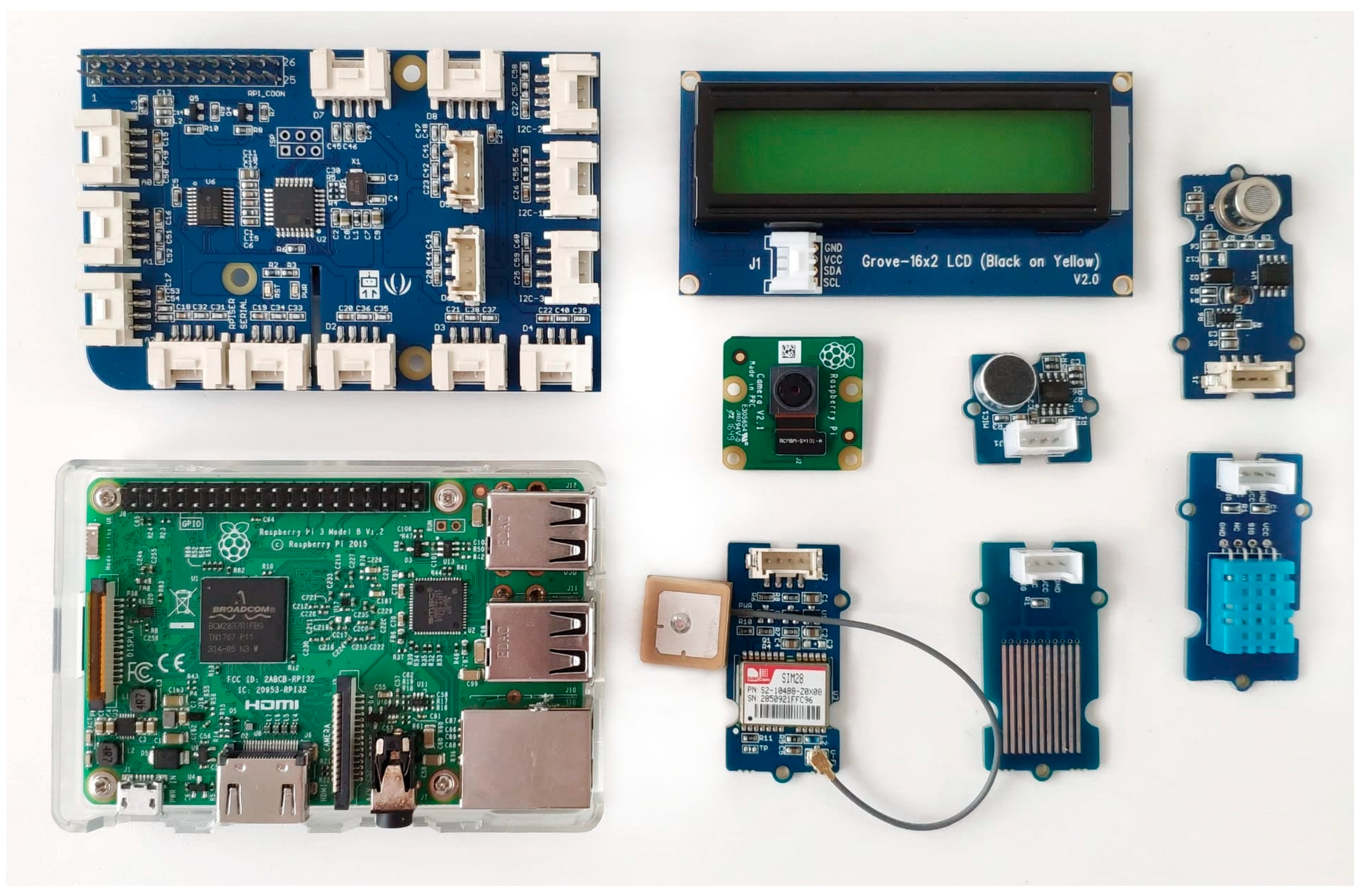
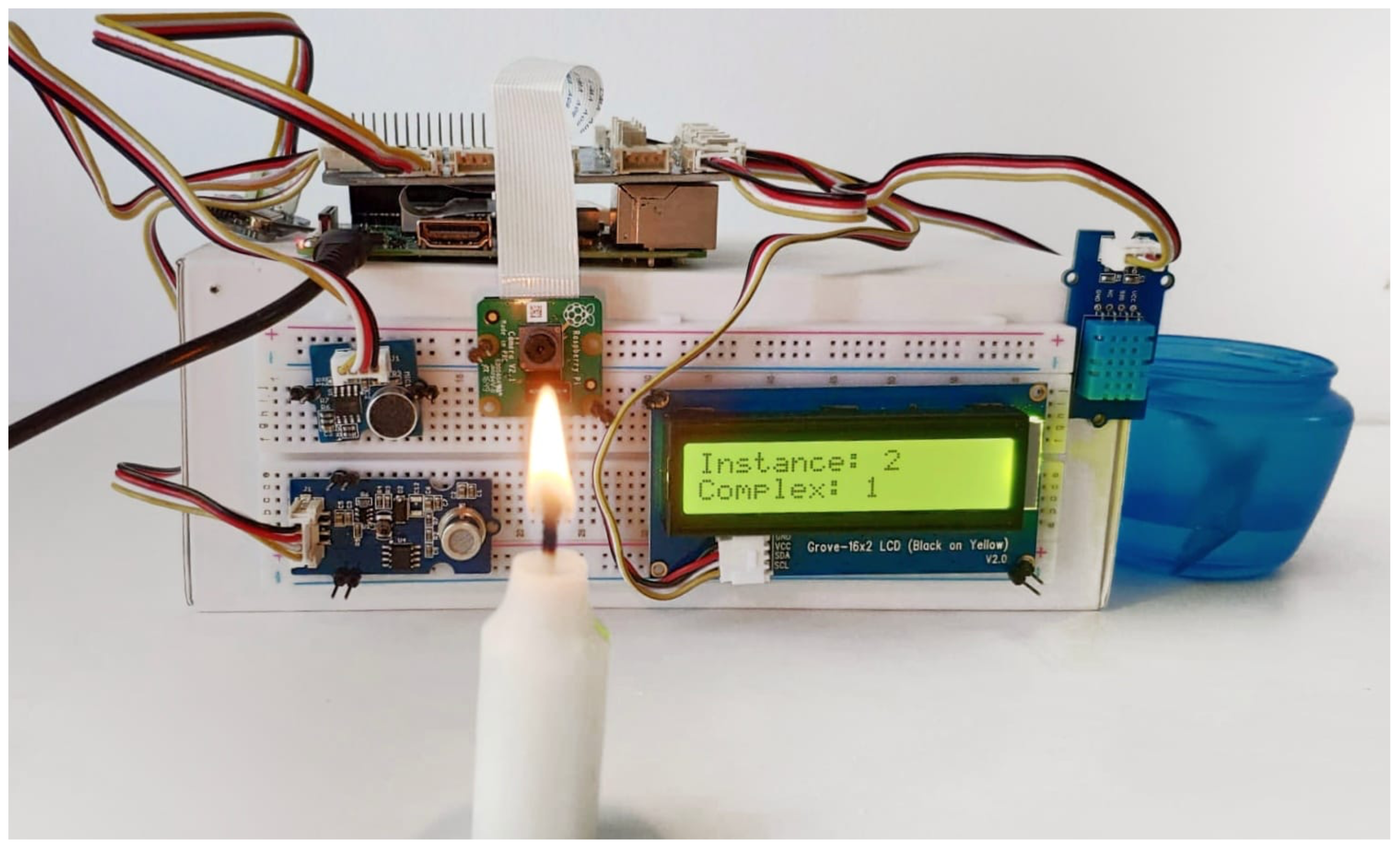
5.1. Implementation Details
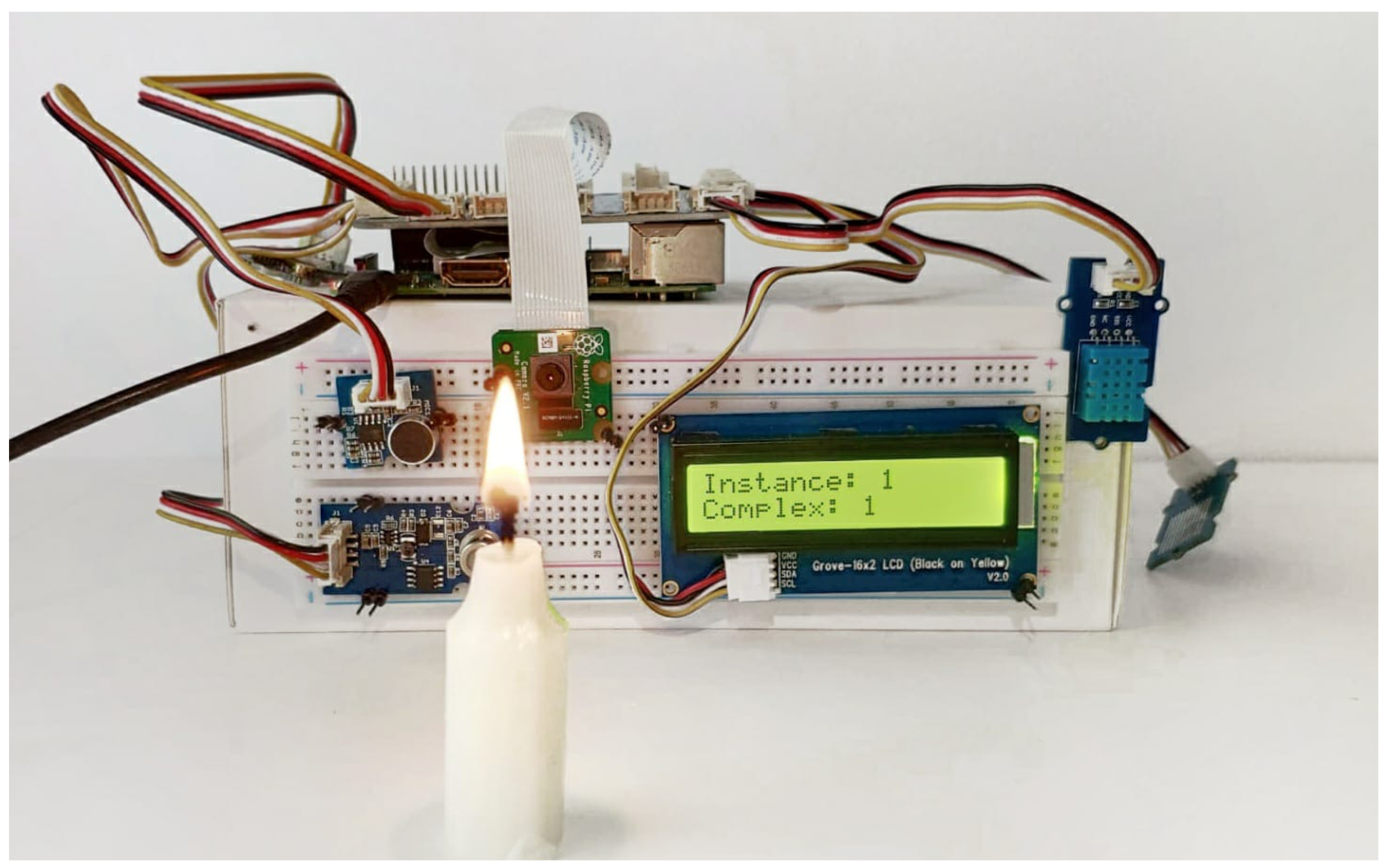
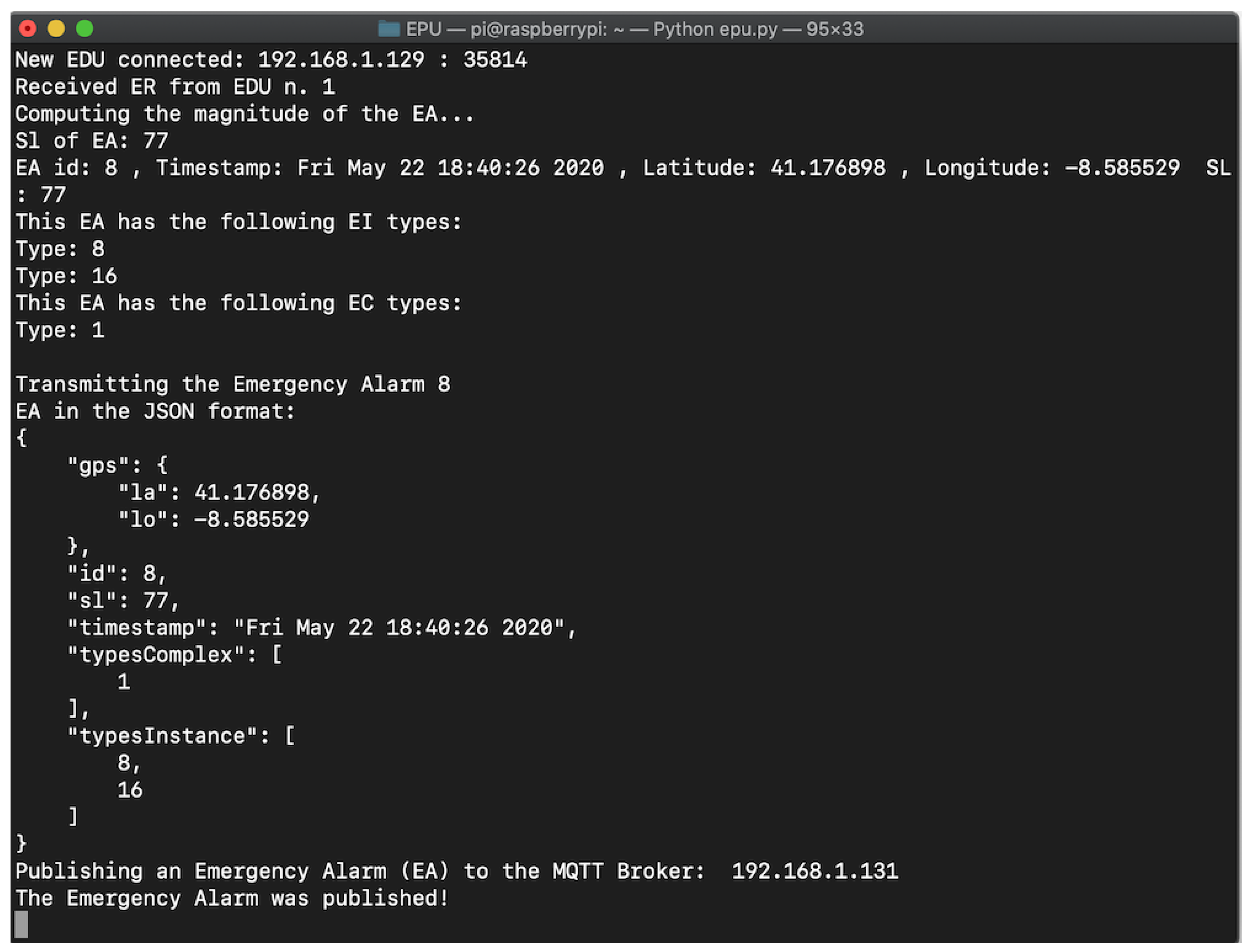
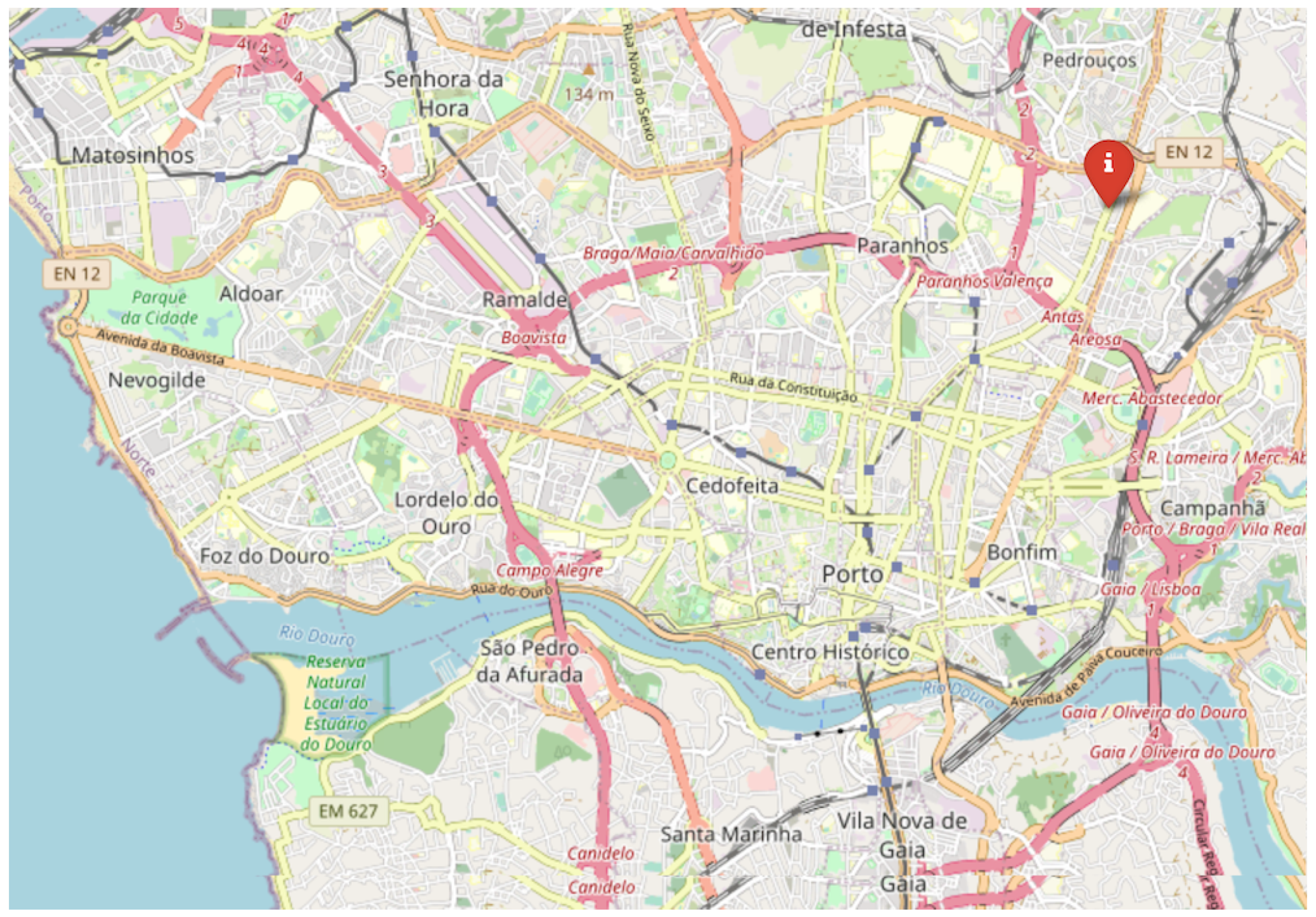
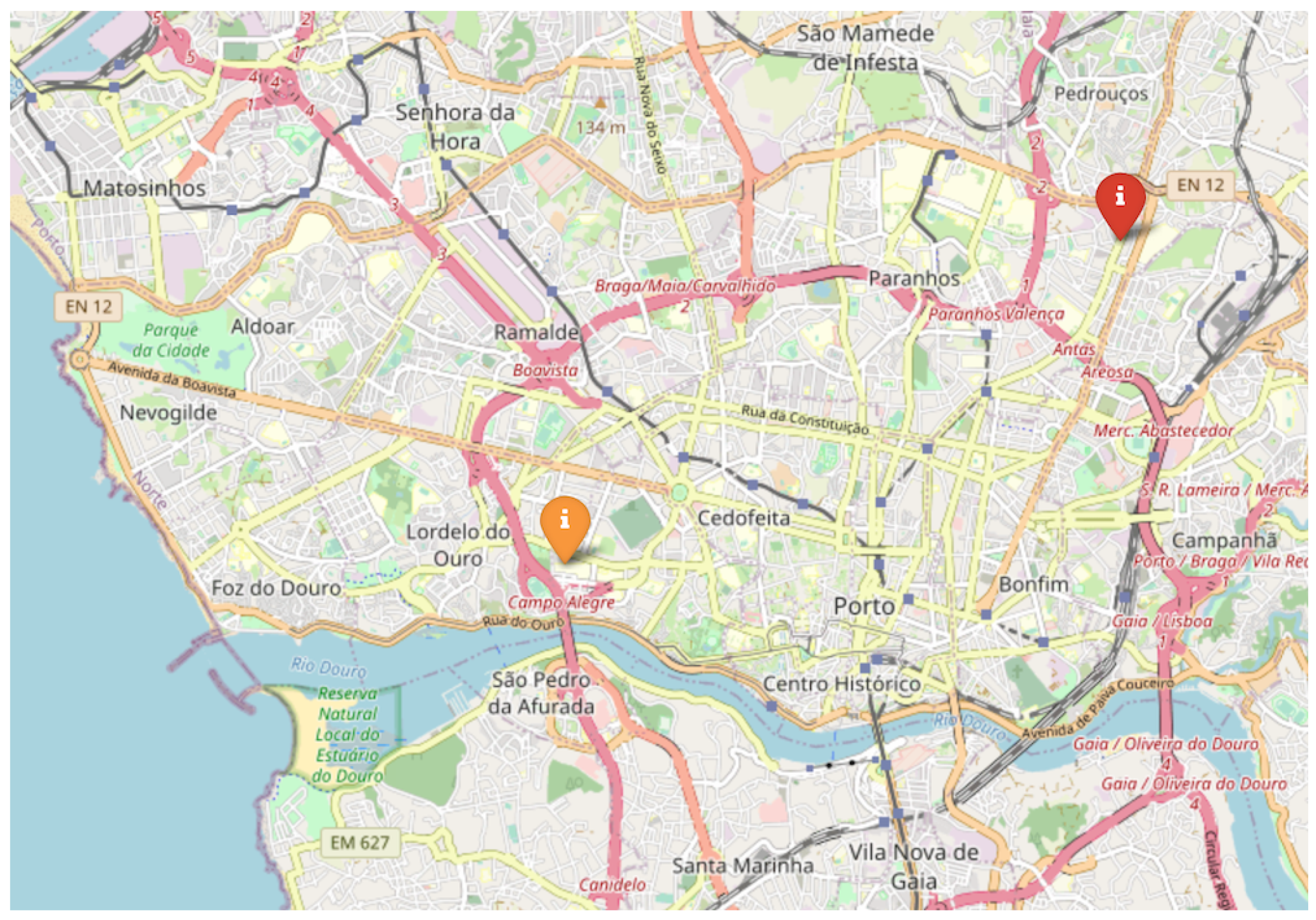
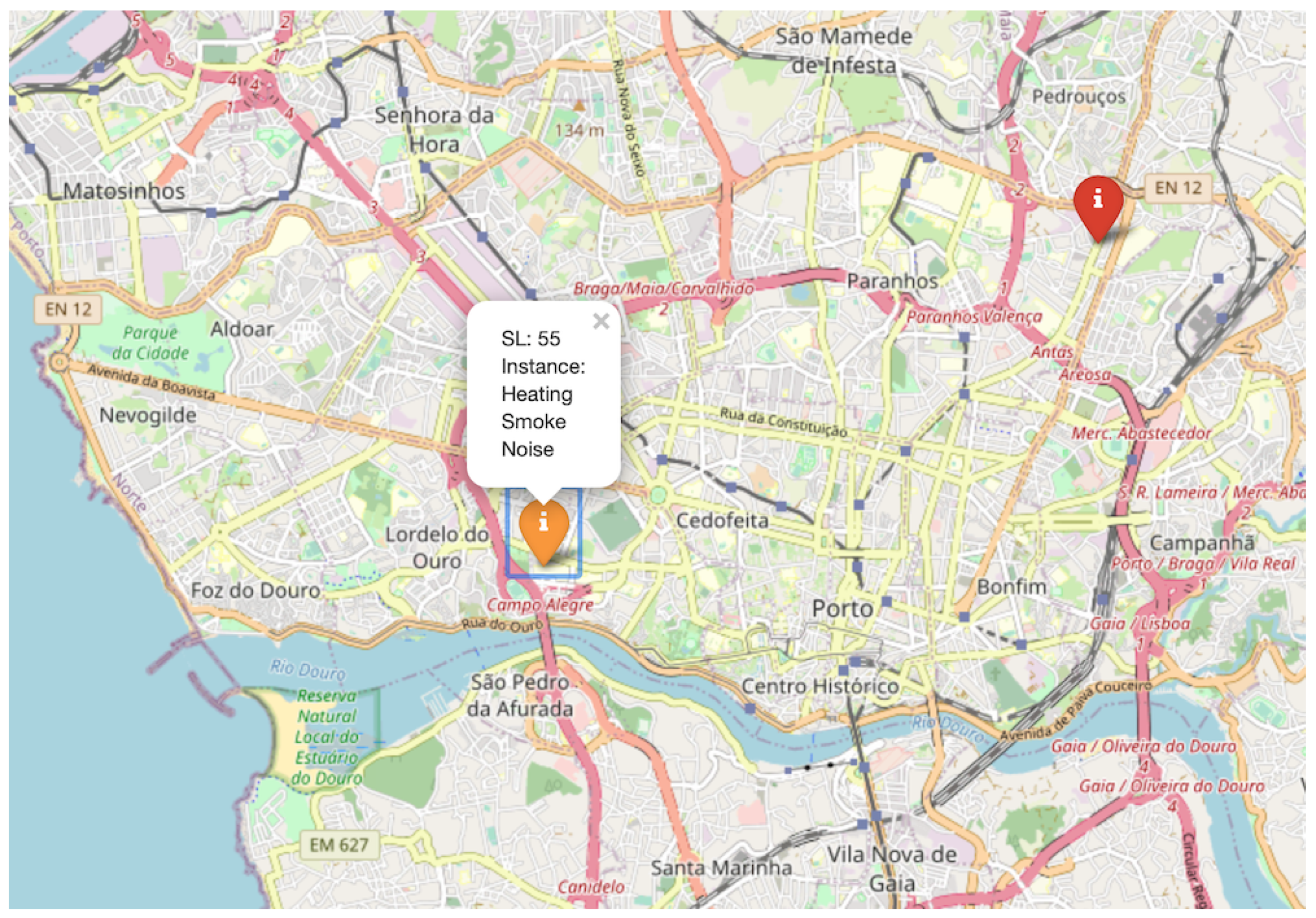
5.2. Detecting Emergencies in A City
5.3. Failures and Dependability of the System
6. Practical Issues When Employing Cameras for Emergency Alerting
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yigitcanlar, T.; Kamruzzaman, M.; Foth, M.; Sabatini-Marques, J.; da Costa, E.; Ioppolo, G. Can cities become smart without being sustainable? A systematic review of the literature. Sustain. Cities Soc. 2019, 45, 348–365. [Google Scholar] [CrossRef]
- Nagy, A.M.; Simon, V. Survey on traffic prediction in smart cities. Pervasive Mobile Comput. 2018, 50, 148–163. [Google Scholar] [CrossRef]
- Alazawi, Z.; Alani, O.; Abdljabar, M.B.; Altowaijri, S.; Mehmood, R. A Smart Disaster Management System for Future Cities. In Proceedings of the 2014 ACM International Workshop on Wireless and Mobile Technologies for Smart Cities; WiMobCity ’14; Association for Computing Machinery: New York, NY, USA, 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Soyata, T.; Habibzadeh, H.; Ekenna, C.; Nussbaum, B.; Lozano, J. Smart city in crisis: Technology and policy concerns. Sustain. Cities Soc. 2019, 50, 101566. [Google Scholar] [CrossRef]
- Shah, S.A.; Seker, D.Z.; Rathore, M.M.; Hameed, S.; Ben Yahia, S.; Draheim, D. Towards Disaster Resilient Smart Cities: Can Internet of Things and Big Data Analytics Be the Game Changers? IEEE Access 2019, 7, 91885–91903. [Google Scholar] [CrossRef]
- Costa, D.G.; de Oliveira, F.P. A prioritization approach for optimization of multiple concurrent sensing applications in smart cities. Future Gener. Comput. Syst. 2020, 108, 228–243. [Google Scholar] [CrossRef]
- Costa, D.G.; Vasques, F.; Portugal, P.; Aguiar, A. A Distributed Multi-Tier Emergency Alerting System Exploiting Sensors-Based Event Detection to Support Smart City Applications. Sensors 2020, 20, 170. [Google Scholar] [CrossRef] [Green Version]
- Karray, F.; Jmal, M.W.; Garcia-Ortiz, A.; Abid, M.; Obeid, A.M. A comprehensive survey on wireless sensor node hardware platforms. Comput. Netw. 2018, 144, 89–110. [Google Scholar] [CrossRef]
- Costa, D.G. Visual Sensors Hardware Platforms: A Review. IEEE Sensors J. 2020, 20, 4025–4033. [Google Scholar] [CrossRef]
- Simonjan, J.; Rinner, B. Decentralized and resource-efficient self-calibration of visual sensor networks. Ad. Hoc. Netw. 2019, 88, 112–128. [Google Scholar] [CrossRef]
- Peixoto, J.; Costa, D.G. Wireless visual sensor networks for smart city applications: A relevance-based approach for multiple sinks mobility. Future Gener. Comput. Sys. 2017, 76, 51–62. [Google Scholar] [CrossRef]
- Akrarai, M.; Margotat, N.; Sicard, G.; Fesquet, L. A Novel Event Based Image Sensor with spacial and temporal redundancy suppression. In Proceedings of the 2020 18th IEEE International New Circuits and Systems Conference (NEWCAS), Montreal, QC, Canada, 16–18 June 2020; pp. 238–241. [Google Scholar]
- Fan, H.; Hernandez Bennetts, V.; Schaffernicht, E.; Lilienthal, A.J. Towards Gas Discrimination and Mapping in Emergency Response Scenarios Using a Mobile Robot with an Electronic Nose. Sensors 2019, 19, 685. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roque, G.; Padilla, V.S. LPWAN Based IoT Surveillance System for Outdoor Fire Detection. IEEE Access 2020, 8, 114900–114909. [Google Scholar] [CrossRef]
- Min, K.; Jung, M.; Kim, J.; Chi, S. Sound Event Recognition-Based Classification Model for Automated Emergency Detection in Indoor Environment. In Advances in Informatics and Computing in Civil and Construction Engineering; Mutis, I., Hartmann, T., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 529–535. [Google Scholar]
- Yap, F.G.H.; Yen, H. Novel Visual Sensor Deployment Algorithm in Occluded Wireless Visual Sensor Networks. IEEE Syst. J. 2017, 11, 2512–2523. [Google Scholar] [CrossRef]
- Li, S.; Kim, J.G.; Han, D.H.; Lee, K.S. A Survey of Energy-Efficient Communication Protocols with QoS Guarantees in Wireless Multimedia Sensor Networks. Sensors 2019, 19, 199. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bin Bahrudin, M.S.; Kassim, R.A.; Buniyamin, N. Development of Fire alarm system using Raspberry Pi and Arduino Uno. In Proceedings of the 2013 International Conference on Electrical, Electronics and System Engineering (ICEESE), Kuala Lumpur, Malaysia, 4–5 December 2013; pp. 43–48. [Google Scholar] [CrossRef]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A Wireless Sensor Network Deployment for Rural and Forest Fire Detection and Verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.; Jun, S.; Kim, S.; Cha, D.; Jeon, K.; Lee, J. Novel fire detection device for robotic fire fighting. In Proceedings of the ICCAS 2010, Gyeonggi-do, South Korea, 27–30 October 2010; pp. 96–100. [Google Scholar] [CrossRef]
- Perumal, K.A.; Ali, M.A.M.; Yahya, Z.H. Fire Fighter Robot with Night Vision Camera. In Proceedings of the 2019 IEEE 15th International Colloquium on Signal Processing Its Applications (CSPA), Penang, Malaysia, 8–9 March 2019; pp. 270–274. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Le, M.T.; Do, A.D.; Duong, H.H.; Thai, T.D.; Tran, D.H. An efficient camera-based surveillance for fall detection of elderly people. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 994–997. [Google Scholar] [CrossRef]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. Real-Life/Real-Time Elderly Fall Detection with a Triaxial Accelerometer. Sensors 2018, 18, 1101. [Google Scholar] [CrossRef] [Green Version]
- Alonso, M.; Brunete, A.; Hernando, M.; Gambao, E. Background-Subtraction Algorithm Optimization for Home Camera-Based Night-Vision Fall Detectors. IEEE Access 2019, 7, 152399–152411. [Google Scholar] [CrossRef]
- Shao, Z.; Cai, J.; Wang, Z. Smart Monitoring Cameras Driven Intelligent Processing to Big Surveillance Video Data. IEEE Trans. Big Data 2018, 4, 105–116. [Google Scholar] [CrossRef]
- Costa, D.G.; Guedes, L.A.; Vasques, F.; Portugal, P. Adaptive Monitoring Relevance in Camera Networks for Critical Surveillance Applications. Inter. J. Distrib. Sens. Netw. 2013, 9, 836721. [Google Scholar] [CrossRef]
- Costa, D.G.; Duran-Faundez, C. Open-Source Electronics Platforms as Enabling Technologies for Smart Cities: Recent Developments and Perspectives. Electronics 2018, 7, 44. [Google Scholar] [CrossRef] [Green Version]
- Sogi, N.R.; Chatterjee, P.; Nethra, U.; Suma, V. SMARISA: A Raspberry Pi Based Smart Ring for Women Safety Using IoT. In Proceedings of the 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 11–12 July 2018; pp. 451–454. [Google Scholar] [CrossRef]
- Kumar, K.N.K.; Natraj, H.; Jacob, T.P. Motion activated security camera using raspberry Pi. In Proceedings of the 2017 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 6–8 April 2017; pp. 1598–1601. [Google Scholar] [CrossRef]
- Khurana, R.; Kushwaha, A.K.S. Deep Learning Approaches for Human Activity Recognition in Video Surveillance-A Survey. In Proceedings of the 2018 First International Conference on Secure Cyber Computing and Communication (ICSCCC), Jalandhar, India, 15–17 December 2018; pp. 542–544. [Google Scholar] [CrossRef]
- Abu-Bakar, S.A.R. Advances in human action recognition: An updated survey. IET Image Process. 2019, 13, 2381–2394. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.; Kim, Y.; Lee, S.; Lee, D.; Ju, J.; Myung, H. Weighted joint-based human behavior recognition algorithm using only depth information for low-cost intelligent video-surveillance system. Expert Syst. Appl. 2016, 45, 131–141. [Google Scholar] [CrossRef]
- Chen, C.; Shao, Y.; Bi, X. Detection of Anomalous Crowd Behavior Based on the Acceleration Feature. IEEE Sensors J. 2015, 15, 7252–7261. [Google Scholar] [CrossRef]
- Vetter, K.; Barnowski, R.; Cates, J.W.; Haefner, A.; Joshi, T.H.; Pavlovsky, R.; Quiter, B.J. Advances in Nuclear Radiation Sensing: Enabling 3-D Gamma-Ray Vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef] [Green Version]
- Tomono, D.; Tanimori, T.; Kubo, H.; Takada, A.; Mizumoto, T.; Mizumura, Y.; Sawano, T.; Matsuoka, Y.; Komura, S.; Nakamura, S.; et al. First application to environmental gamma-ray imaging with an electron tracking compton camera. In Proceedings of the 2013 IEEE Nuclear Science Symposium and Medical Imaging Conference (2013 NSS/MIC), Seoul, Korea, 27 October–2 November 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Santos, G.L.; Endo, P.T.; Monteiro, K.H.d.C.; Rocha, E.d.S.; Silva, I.; Lynn, T. Accelerometer-Based Human Fall Detection Using Convolutional Neural Networks. Sensors 2019, 19, 1644. [Google Scholar] [CrossRef] [Green Version]
- Govil, K.; Welch, M.L.; Ball, J.T.; Pennypacker, C.R. Preliminary Results from a Wildfire Detection System Using Deep Learning on Remote Camera Images. Remote Sens. 2020, 12, 166. [Google Scholar] [CrossRef] [Green Version]
- Xie, D.; Zhang, L.; Bai, L. Deep learning in visual computing and signal processing. Appl. Comput. Intell. Soft Comput. 2017, 2017. [Google Scholar] [CrossRef]
- Bu, F.; Gharajeh, M.S. Intelligent and vision-based fire detection systems: A survey. Image Vis. Comput. 2019, 91, 103803. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Mehmood, I.; Rho, S.; Baik, S.W. Convolutional Neural Networks Based Fire Detection in Surveillance Videos. IEEE Access 2018, 6, 18174–18183. [Google Scholar] [CrossRef]
- Howse, J.; Joshi, P.; Beyeler, M. Opencv: Computer Vision Projects with Python; Packt Publishing Ltd.: Birmingham, UK, 2016. [Google Scholar]
- Yassein, M.B.; Shatnawi, M.Q.; Aljwarneh, S.; Al-Hatmi, R. Internet of Things: Survey and open issues of MQTT protocol. In Proceedings of the 2017 International Conference on Engineering MIS (ICEMIS), Monastir, Tunisia, 8–10 May 2017; pp. 1–6. [Google Scholar]
- Jesus, G.; Casimiro, A.; Oliveira, A. A Survey on Data Quality for Dependable Monitoring in Wireless Sensor Networks. Sensors 2017, 17, 2010. [Google Scholar] [CrossRef]
- Jesus, T.C.; Portugal, P.; Vasques, F.; Costa, D.G. Automated Methodology for Dependability Evaluation of Wireless Visual Sensor Networks. Sensors 2018, 18, 2629. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deif, D.; Gadallah, Y. Reliability assessment of wireless sensor network deployments. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar]
- Pervez, F.; Qadir, J.; Khalil, M.; Yaqoob, T.; Ashraf, U.; Younis, S. Wireless Technologies for Emergency Response: A Comprehensive Review and Some Guidelines. IEEE Access 2018, 6, 71814–71838. [Google Scholar] [CrossRef]
- Costa, D.G.; Silva, I.; Guedes, L.A.; Vasques, F.; Portugal, P. Availability Issues in Wireless Visual Sensor Networks. Sensors 2014, 14, 2795–2821. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jesus, T.C.; Costa, D.G.; Portugal, P.; Vasques, F.; Aguiar, A. Modelling Coverage Failures Caused by Mobile Obstacles for the Selection of Faultless Visual Nodes in Wireless Sensor Networks. IEEE Access 2020, 8, 41537–41550. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, H.; Li, X.; Wang, Y.; Jia, C. Centralized Duplicate Removal Video Storage System with Privacy Preservation in IoT. Sensors 2018, 18, 1814. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ning, H.; Li, Z.; Hodgson, M.E.; Wang, C.S. Prototyping a Social Media Flooding Photo Screening System Based on Deep Learning. ISPRS Int. J. Geo-Inf. 2020, 9, 104. [Google Scholar] [CrossRef] [Green Version]
- Costa, D.G.; Duran-Faundez, C.; Andrade, D.C.; Rocha-Junior, J.B.; Just Peixoto, J.P. TwitterSensing: An Event-Based Approach for Wireless Sensor Networks Optimization Exploiting Social Media in Smart City Applications. Sensors 2018, 18, 1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muhammad, G.; Alsulaiman, M.; Amin, S.U.; Ghoneim, A.; Alhamid, M.F. A Facial-Expression Monitoring System for Improved Healthcare in Smart Cities. IEEE Access 2017, 5, 10871–10881. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance Event | Scalar data | Type (y) | Threshold () |
| Heating | Temperature (thermometer) | 1 | C |
| Heating | Temperature (infrared image) | 1 | C |
| Freezing | Temperature (thermometer) | 2 | C |
| Freezing | Temperature (infrared image) | 2 | C |
| Low Humidity | Relative humidity | 3 | |
| Smoke | CO concentration | 4 | ppm |
| Toxic Gases (leakage) | Ammonia (NH) | 5 | ppm |
| Heavy Rain | Rain precipitation | 6 | mm/h |
| Earthquake | Seismic magnitude | 7 | M |
| Noise Pollution | Audio signal strength | 8 | dB |
| Radiation | Ionizing radiation (Geiger sensor) | 9 | Sv/hr |
| Radiation | Ionizing radiation (gamma image) | 9 | Sv/hr |
| Blast Wave | Air pressure (or wind speed) | 10 | psi |
| Complex Event | Dangerous Pattern | Type (w) | Function |
| Fire | Active flames (any colors) | 1 | Detected flames |
| Smoke | Any type of smoke | 2 | Detected smoke (fire or chemical) |
| Fire and Smoke | Flames with smoke | 3 | Detected flames and smoke |
| Car Accident | Two or more cars abruptly stopped | 4 | Crash patterns (broken elements) |
| Injured people | People needing assistance | 5 | People laying on the floor |
| Explosion | Destruction patterns | 6 | Detected wreckage |
| Panic | People randomly running | 7 | Running but no historical behavior |
| Failure | Causes | Impacts | Solutions |
|---|---|---|---|
| Energy | Current energy supply is interrupted | An EDU or EPU gets offline. For EPU disabling, the impact is more severe | The use of backup batteries will enhance the resistance to energy failures |
| An EDU uses only batteries and their energy is depleted | An EDU gets offline | Batteries recharging or replacement is required | |
| Hardware | Components wearing out | Electronic components may malfunction or stop working | Periodic checking of the components |
| Errors in the fabrication process | Electronic components may malfunction or stop working | Periodic checking of the components | |
| Communication | Permanent communication failures | Disconnection of an EDU, an EPU or the MQTT broker | Backup communication links can be used |
| Transient communication failures | Packet losses in EDU/EPU and EPU/MQTT-broker communications | Retransmission of lost packets or transmission of redundant packets | |
| Coverage | Camera’s FoV is occluded by an obstacle | Critical events may be not detected | Pan-Tilt-Zoom cameras can be used |
| Low luminosity | Critical events may be not detected | Infrared cameras can complement “conventional” cameras | |
| Damage | Critical events may damage an EDU | The EDU may malfunction or stop working | Protective cases or deployment on “safer” spots |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costa, D.G.; Vasques, F.; Portugal, P.; Aguiar, A. On the Use of Cameras for the Detection of Critical Events in Sensors-Based Emergency Alerting Systems. J. Sens. Actuator Netw. 2020, 9, 46. https://doi.org/10.3390/jsan9040046
Costa DG, Vasques F, Portugal P, Aguiar A. On the Use of Cameras for the Detection of Critical Events in Sensors-Based Emergency Alerting Systems. Journal of Sensor and Actuator Networks. 2020; 9(4):46. https://doi.org/10.3390/jsan9040046
Chicago/Turabian StyleCosta, Daniel G., Francisco Vasques, Paulo Portugal, and Ana Aguiar. 2020. "On the Use of Cameras for the Detection of Critical Events in Sensors-Based Emergency Alerting Systems" Journal of Sensor and Actuator Networks 9, no. 4: 46. https://doi.org/10.3390/jsan9040046
APA StyleCosta, D. G., Vasques, F., Portugal, P., & Aguiar, A. (2020). On the Use of Cameras for the Detection of Critical Events in Sensors-Based Emergency Alerting Systems. Journal of Sensor and Actuator Networks, 9(4), 46. https://doi.org/10.3390/jsan9040046