
Monitoring Urban Deprived Areas with Remote Sensing and Machine Learning in Case of Disaster Recovery



Abstract
:1. Introduction
2. Materials and Methods
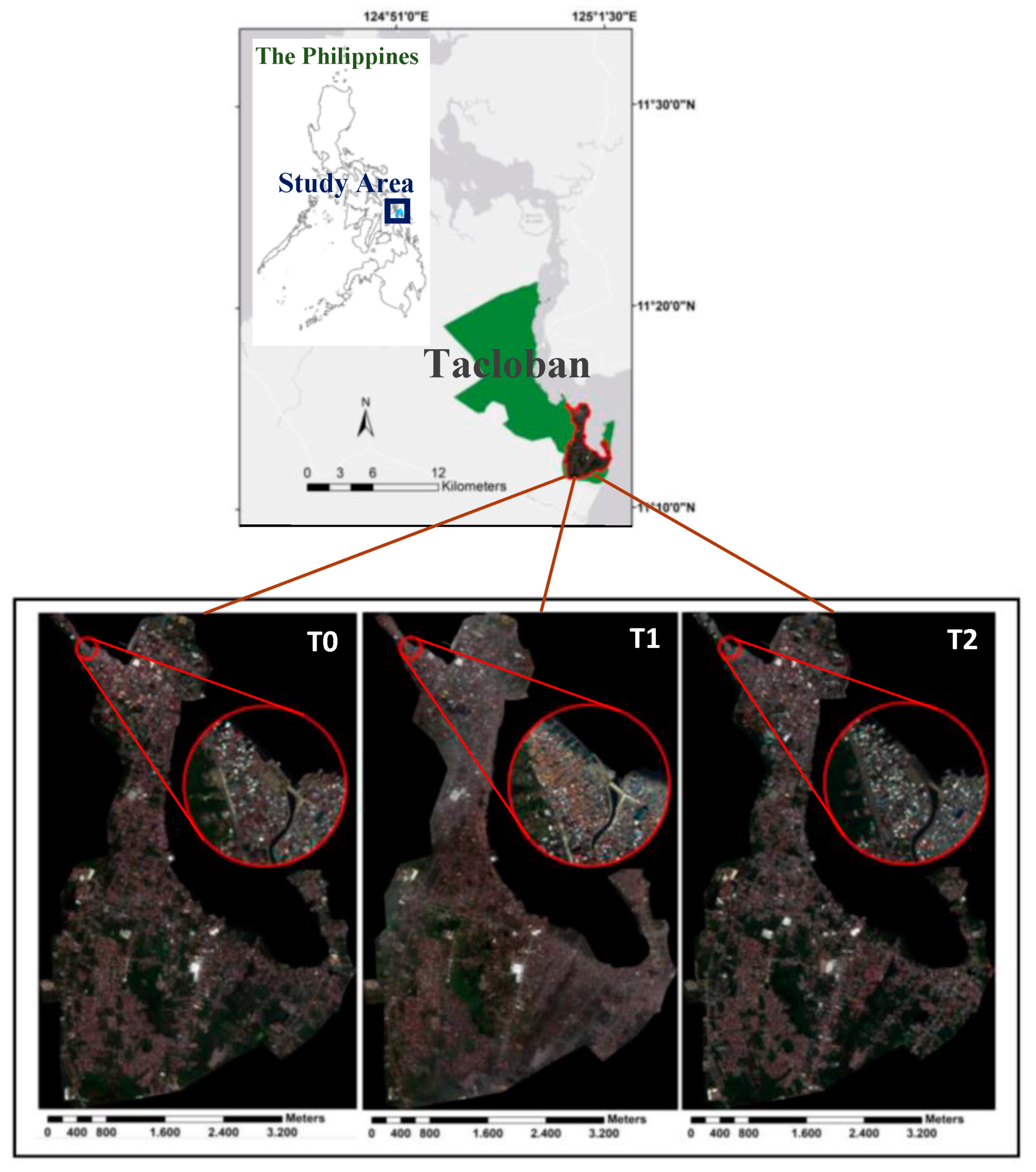
2.1. Case Study and Remote Sensing Data
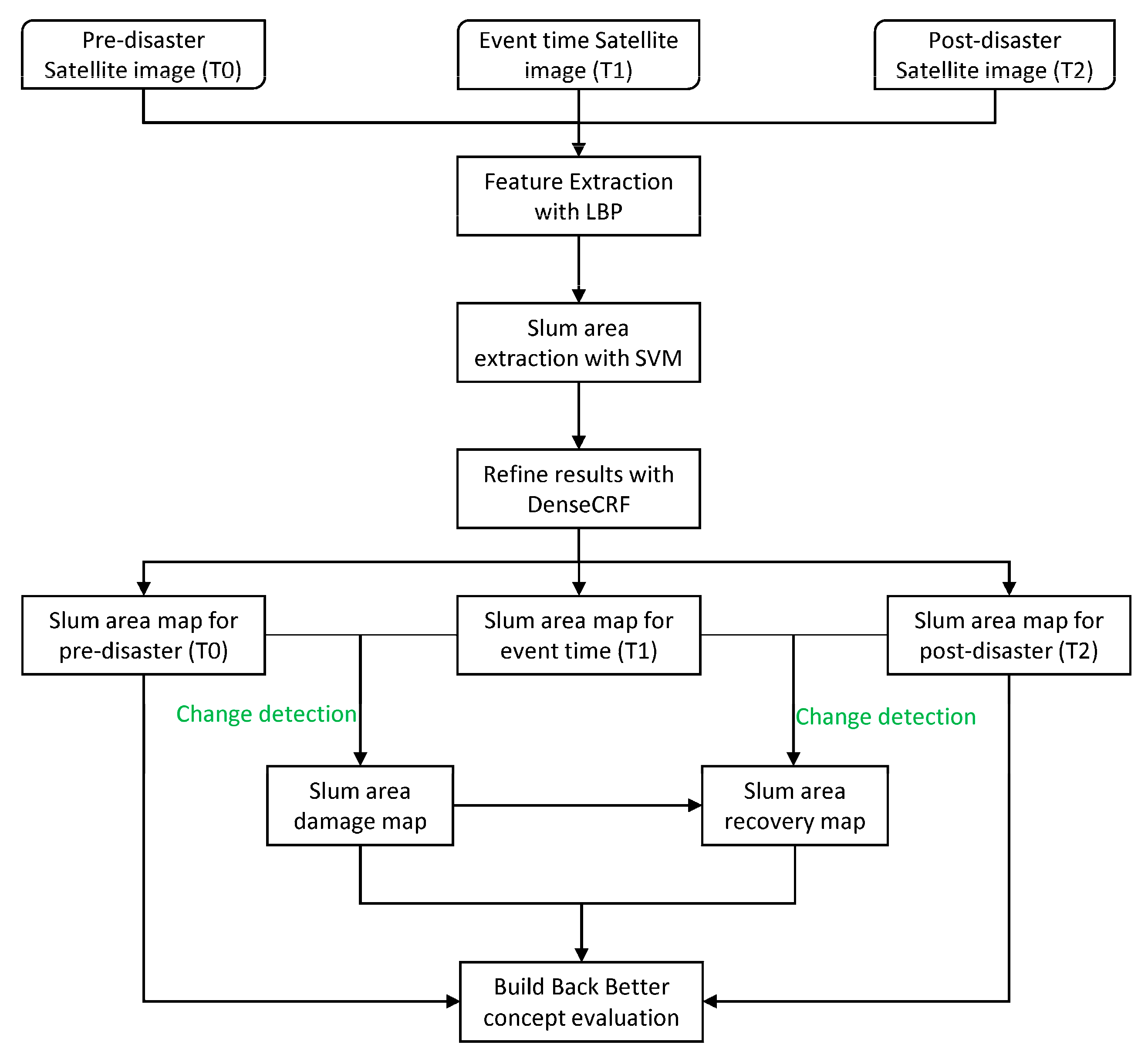
2.2. Methods
2.2.1. Mapping Deprived Areas with SVM and DenseCRF
2.2.2. Accuracy Assessment
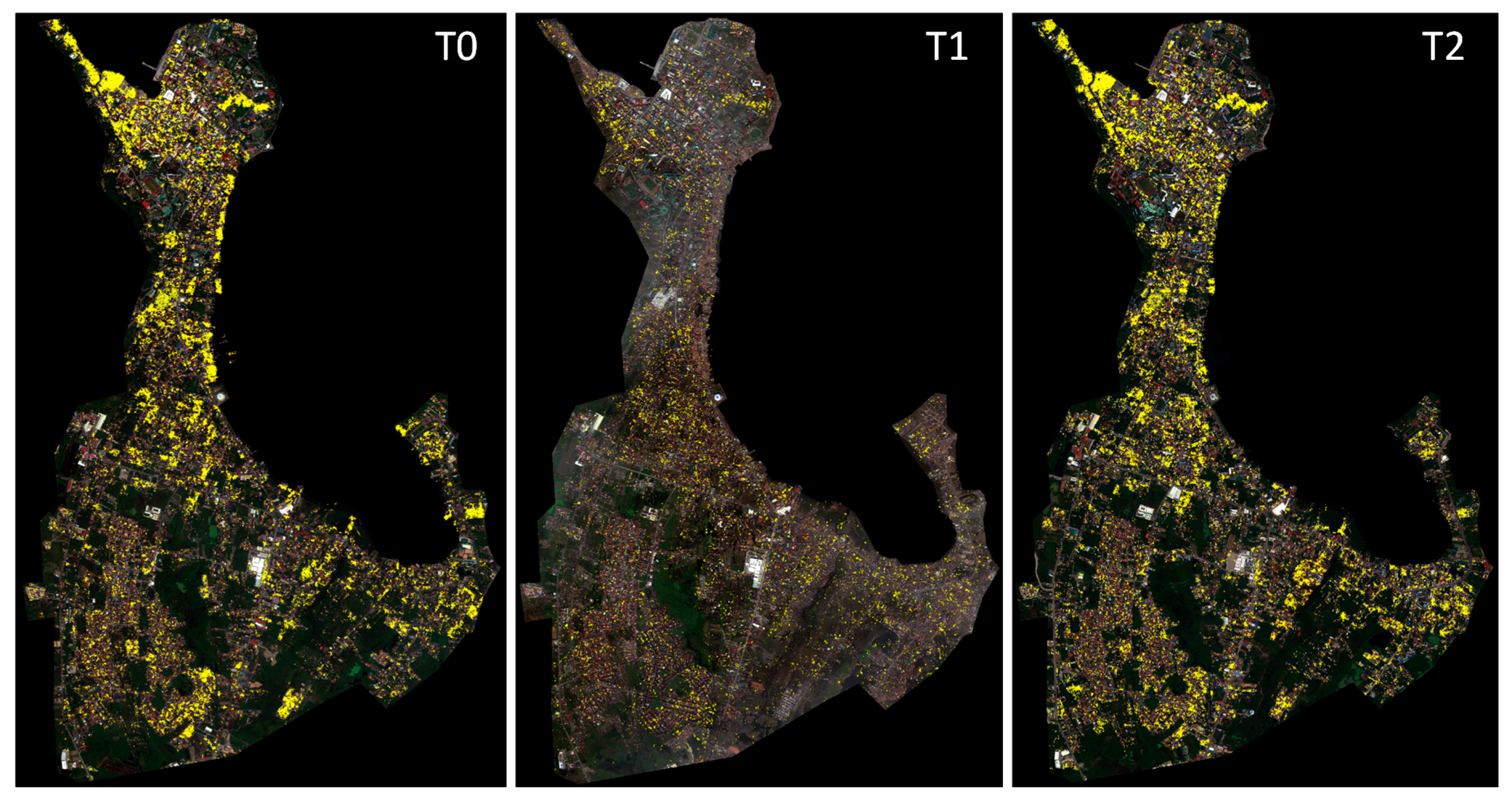
2.2.3. Change Analysis
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. World Urbanization Prospects, the 2014 Revision; United Nations: New York, NY, USA, 2014. [Google Scholar]
- Mahabir, R.; Crooks, A.; Croitoru, A.; Agouris, P. The study of slums as social and physical constructs: Challenges and emerging research opportunities. Reg. Stud. Reg. Sci. 2016, 3, 399–419. [Google Scholar] [CrossRef] [Green Version]
- Mahabir, R.; Croitoru, A.; Crooks, A.T.; Agouris, P.; Stefanidis, A. A critical review of high and very high-resolution remote sensing approaches for detecting and mapping slums: Trends, challenges and emerging opportunities. Urban Sci. 2018, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Thomson, D.R.; Kuffer, M.; Boo, G.; Hati, B.; Grippa, T.; Elsey, H.; Linard, C.; Mahabir, R.; Kyobutungi, C.; Maviti, J.; et al. Need for an integrated deprived area “slum” mapping system (ideamaps) in low- and middle-income countries (lmics). Soc. Sci. 2020, 9, 80. [Google Scholar] [CrossRef]
- Chang, S.E. Urban disaster recovery: A measurement framework and its application to the 1995 kobe earthquake. Disasters 2010, 34, 303–327. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Kerle, N.; Kuffer, M.; Ghaffarian, S. Post-disaster recovery assessment with machine learning-derived land cover and land use information. Remote Sens. 2019, 11, 1174. [Google Scholar] [CrossRef] [Green Version]
- UNISDR. Sendai framework for disaster risk reduction 2015–2030. In Proceedings of the Third World Conference Disaster Risk Reduction, Sendai, Japan, 14–18 March 2015; pp. 1–25. [Google Scholar]
- Ghaffarian, S.; Kerle, N.; Filatova, T. Remote sensing-based proxies for urban disaster risk management and resilience: A review. Remote Sens. 2018, 10, 1760. [Google Scholar] [CrossRef] [Green Version]
- Kerle, N.; Nex, F.; Gerke, M.; Duarte, D.; Vetrivel, A. Uav-based structural damage mapping: A review. ISPRS Int. J. Geo-Inf. 2019, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Nex, F.; Duarte, D.; Tonolo, F.G.; Kerle, N. Structural building damage detection with deep learning: Assessment of a state-of-the-art cnn in operational conditions. Remote Sens. 2019, 11, 2765. [Google Scholar] [CrossRef] [Green Version]
- Ghaffarian, S.; Kerle, N. Towards post-disaster debris identification for precise damage and recovery assessments from uav and satellite images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 297–302. [Google Scholar] [CrossRef] [Green Version]
- Ebert, A.; Kerle, N.; Stein, A. Urban social vulnerability assessment with physical proxies and spatial metrics derived from air- and spaceborne imagery and gis data. Nat. Hazards 2009, 48, 275–294. [Google Scholar] [CrossRef]
- Harb, M.M.; De Vecchi, D.; Dell’Acqua, F. Phisical vulnerability proxies from remotes sensing: Reviewing, implementing and disseminating selected techniques. IEEE Geosci. Remote Sens. Mag. 2015, 3, 20–33. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Tilon, S.; Nex, F.; Kerle, N.; Vosselman, G. Post-disaster building damage detection from earth observation imagery using unsupervised and transferable anomaly detecting generative adversarial networks. Remote Sens. 2020, 12, 4193. [Google Scholar] [CrossRef]
- Burton, C.; Mitchell, J.T.; Cutter, S.L. Evaluating post-katrina recovery in mississippi using repeat photography. Disasters 2011, 35, 488–509. [Google Scholar] [CrossRef] [PubMed]
- Brown, D.; Saito, K.; Liu, M.; Spence, R.; So, E.; Ramage, M. The use of remotely sensed data and ground survey tools to assess damage and monitor early recovery following the 12.5.2008 wenchuan earthquake in china. Bull. Earthq. Eng. 2011, 10, 741–764. [Google Scholar] [CrossRef]
- Hoshi, T.; Murao, O.; Yoshino, K.; Yamazaki, F.; Estrada, M. Post-disaster urban recovery monitoring in pisco after the 2007 peru earthquake using satellite image. J. Disaster Res. 2014, 9, 1059–1068. [Google Scholar] [CrossRef]
- Contreras, D.; Blaschke, T.; Tiede, D.; Jilge, M. Monitoring recovery after earthquakes through the integration of remote sensing, gis, and ground observations: The case of l’aquila (italy). Cartogr. Geogr. Inf. Sci. 2016, 43, 115–133. [Google Scholar] [CrossRef]
- de Alwis Pitts, D.A.; So, E. Enhanced change detection index for disaster response, recovery assessment and monitoring of buildings and critical facilities—a case study for muzzaffarabad, pakistan. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 167–177. [Google Scholar] [CrossRef]
- Derakhshan, S.; Cutter, S.L.; Wang, C. Remote sensing derived indices for tracking urban land surface change in case of earthquake recovery. Remote Sens. 2020, 12, 895. [Google Scholar] [CrossRef] [Green Version]
- Ghaffarian, S.; Rezaie Farhadabad, A.; Kerle, N. Post-disaster recovery monitoring with google earth engine. Appl. Sci. 2020, 10, 4574. [Google Scholar] [CrossRef]
- Kerle, N.; Ghaffarian, S.; Nawrotzki, R.; Leppert, G.; Lech, M. Evaluating resilience-centered development interventions with remote sensing. Remote Sens. 2019, 11, 2511. [Google Scholar] [CrossRef] [Green Version]
- Ghaffarian, S.; Kerle, N. Post-disaster recovery assessment using multi-temporal satellite images with a deep learning approach. In Proceedings of the 39th EARSeL Conference, Salzburg, Austria, 1–4 July 2019. [Google Scholar]
- Ghaffarian, S.; Kerle, N.; Pasolli, E.; Jokar Arsanjani, J. Post-disaster building database updating using automated deep learning: An integration of pre-disaster openstreetmap and multi-temporal satellite data. Remote Sens. 2019, 11, 2427. [Google Scholar] [CrossRef] [Green Version]
- UN-Habitat. Slums: Some Definitions; Nairobi: Un-habitat. Available online: https://mirror.unhabitat.org/documents/media_centre/sowcr2006/SOWCR%205.pdf (accessed on 27 March 2021).
- Taubenböck, H.; Wegmann, M.; Roth, A.; Mehl, H.; Dech, S. Urbanization in india—Spatiotemporal analysis using remote sensing data. Comput. Environ. Urban Syst. 2009, 33, 179–188. [Google Scholar] [CrossRef]
- Arribas-Bel, D.; Patino, J.E.; Duque, J.C. Remote sensing-based measurement of living environment deprivation: Improving classical approaches with machine learning. PLoS ONE 2017, 12, e0176684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Kuffer, M.; Roy, D.; Pfeffer, K. Deprivation pockets through the lens of convolutional neural networks. Remote Sens. Environ. 2019, 234, 111448. [Google Scholar] [CrossRef]
- Graesser, J.; Cheriyadat, A.; Vatsavai, R.R.; Chandola, V.; Long, J.; Bright, E. Image based characterization of formal and informal neighborhoods in an urban landscape. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1164–1176. [Google Scholar] [CrossRef]
- Kohli, D.; Sliuzas, R.; Kerle, N.; Stein, A. An ontology of slums for image-based classification. Comput. Environ. Urban Syst. 2012, 36, 154–163. [Google Scholar] [CrossRef]
- Tong, X.-Y.; Xia, G.-S.; Lu, Q.; Shen, H.; Li, S.; You, S.; Zhang, L. Land-cover classification with high-resolution remote sensing images using transferable deep models. Remote Sens. Environ. 2020, 237, 111322. [Google Scholar] [CrossRef] [Green Version]
- Abdi, A.M. Land cover and land use classification performance of machine learning algorithms in a boreal landscape using sentinel-2 data. Gisci. Remote Sens. 2020, 57, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. Joint deep learning for land cover and land use classification. Remote Sens. Environ. 2019, 221, 173–187. [Google Scholar] [CrossRef] [Green Version]
- Ghaffarian, S.; Ghaffarian, S. Automatic histogram-based fuzzy c-means clustering for remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2014, 97, 46–57. [Google Scholar] [CrossRef]
- Ghaffarian, S.; Ghaffarian, S. Automatic building detection based on purposive fastica (pfica) algorithm using monocular high resolution google earth images. ISPRS J. Photogramm. Remote Sens. 2014, 97, 152–159. [Google Scholar] [CrossRef]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A survey of deep learning-based object detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- Ghaffarian, S.; Gokasar, I. Automatic vehicle detection based on automatic histogram-based fuzzy c- means algorithm and perceptual grouping using very high-resolution aerial imagery and road vector data. J. Appl. Remote Sens. 2016, 10, 015011. [Google Scholar] [CrossRef]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R. Slums from space—15 years of slum mapping using remote sensing. Remote Sens. 2016, 8, 455. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Barrosb, J. Urban morphology of unplanned settlements: The use of spatial metrics in vhr remotely sensed images. Procedia Environ. Sci. 2011, 7, 152–157. [Google Scholar] [CrossRef] [Green Version]
- Kohli, D.; Sliuzas, R.; Stein, A. Urban slum detection using texture and spatial metrics derived from satellite imagery. J. Spat. Sci. 2016, 61, 405–426. [Google Scholar] [CrossRef] [Green Version]
- Fallatah, A.; Jones, S.; Mitchell, D.; Kohli, D. Mapping informal settlement indicators using object-oriented analysis in the middle east. Int. J. Digit. Earth 2019, 12, 802–824. [Google Scholar] [CrossRef]
- Gadiraju, K.K.; Vatsavai, R.R.; Kaza, N.; Wibbels, E.; Krishna, A. Machine learning approaches for slum detection using very high resolution satellite images. In Proceedings of the 2018 IEEE International Conference on Data Mining Workshops (ICDMW), Singapore, 17–20 November 2018; pp. 1397–1404. [Google Scholar]
- Duque, J.C.; Patino, J.E.; Betancourt, A. Exploring the potential of machine learning for automatic slum identification from vhr imagery. Remote Sens. 2017, 9, 895. [Google Scholar] [CrossRef] [Green Version]
- Ranguelova, E.; Weel, B.; Roy, D.; Kuffer, M.; Pfeffer, K.; Lees, M. Image based classification of slums, built-up and non-built-up areas in kalyan and bangalore, india. Eur. J. Remote Sens. 2019, 52, 40–61. [Google Scholar] [CrossRef] [Green Version]
- Leonita, G.; Kuffer, M.; Sliuzas, R.; Persello, C. Machine learning-based slum mapping in support of slum upgrading programs: The case of bandung city, indonesia. Remote Sens. 2018, 10, 1522. [Google Scholar] [CrossRef] [Green Version]
- Ajami, A.; Kuffer, M.; Persello, C.; Pfeffer, K. Identifying a slums’ degree of deprivation from vhr images using convolutional neural networks. Remote Sens. 2019, 11, 1282. [Google Scholar] [CrossRef] [Green Version]
- Verma, D.; Jana, A.; Ramamritham, K. Transfer learning approach to map urban slums using high and medium resolution satellite imagery. Habitat Int. 2019, 88, 101981. [Google Scholar] [CrossRef]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R.; Baud, I. Extraction of slum areas from vhr imagery using glcm variance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1830–1840. [Google Scholar] [CrossRef]
- Wurm, M.; Taubenböck, H.; Weigand, M.; Schmitt, A. Slum mapping in polarimetric sar data using spatial features. Remote Sens. Environ. 2017, 194, 190–204. [Google Scholar] [CrossRef]
- Krähenbühl, P.; Koltun, V. Efficient inference in fully connected crfs with gaussian edge potentials. Adv. Neural Inf. Process Syst. 2011, 4, 109–117. [Google Scholar]
- Mori, N.; Kato, M.; Kim, S.; Mase, H.; Shibutani, Y.; Takemi, T.; Tsuboki, K.; Yasuda, T. Local amplification of storm surge by super typhoon haiyan in leyte gulf. Geophys. Res. Lett. 2014, 41, 5106–5113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ching, P.K.; de Los Reyes, V.C.; Sucaldito, M.N.; Tayag, E. An assessment of disaster-related mortality post-haiyan in tacloban city. West. Pac. Surveill. Response J. 2015, 6, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support vector machine versus random forest for remote sensing image classification: A meta-analysis and systematic review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Eggen, M.; Ozdogan, M.; Zaitchik, B.F.; Simane, B. Land cover classification in complex and fragmented agricultural landscapes of the ethiopian highlands. Remote Sens. 2016, 8, 1020. [Google Scholar] [CrossRef] [Green Version]
- Vetrivel, A.; Gerke, M.; Kerle, N.; Vosselman, G. Identification of structurally damaged areas in airborne oblique images using a visual-bag-of-words approach. Remote Sens. 2016, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Zafari, A.; Zurita-Milla, R.; Izquierdo-Verdiguier, E. Evaluating the performance of a random forest kernel for land cover classification. Remote Sens. 2019, 11, 575. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Mboga, N.; Persello, C.; Bergado, J.; Stein, A. Detection of informal settlements from vhr images using convolutional neural networks. Remote Sens. 2017, 9, 1106. [Google Scholar] [CrossRef] [Green Version]
- Turker, M.; Koc-San, D. Building extraction from high-resolution optical spaceborne images using the integration of support vector machine (svm) classification, hough transformation and perceptual grouping. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 58–69. [Google Scholar] [CrossRef]
- Koc San, D.; Turker, M. Support vector machines classification for finding building patches from ikonos imagery: The effect of additional bands. J. Appl. Remote Sens. 2014, 8, 083694. [Google Scholar] [CrossRef]
- Potts, R.B. Some generalized order-disorder transformations. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1952; Volume 48, pp. 106–109. [Google Scholar]
- Marsett, R.C.; Qi, J.; Heilman, P.; Biedenbender, S.H.; Carolyn Watson, M.; Amer, S.; Weltz, M.; Goodrich, D.; Marsett, R. Remote sensing for grassland management in the arid southwest. Rangel. Ecol. Manag. 2006, 59, 530–540. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Satellite | Acquisition Date | Spatial Resolution |
|---|---|---|---|
| T0 | WorldView2 | 17 March 2013 | 2 m |
| T1 | 11 November 2013 | ||
| T2 | 18 March 2017 |
| Time/ID | Pre-Disaster (T0) | Event Time (T1) | Post-Disaster (T2) | |||
|---|---|---|---|---|---|---|
| Accuracy measure | Slum | Non-slum | Slum | Non-slum | Slum | Non-slum |
| Producer’s accuracy (%) | 93.3 | 76.8 | 71.4 | 90.1 | 76.2 | 93.2 |
| User’s accuracy (%) | 76.4 | 93.5 | 74.1 | 88.9 | 88.9 | 84.6 |
| Overall accuracy (%) | 84.2 | 83.2 | 86.1 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghaffarian, S.; Emtehani, S. Monitoring Urban Deprived Areas with Remote Sensing and Machine Learning in Case of Disaster Recovery. Climate 2021, 9, 58. https://doi.org/10.3390/cli9040058
Ghaffarian S, Emtehani S. Monitoring Urban Deprived Areas with Remote Sensing and Machine Learning in Case of Disaster Recovery. Climate. 2021; 9(4):58. https://doi.org/10.3390/cli9040058
Chicago/Turabian StyleGhaffarian, Saman, and Sobhan Emtehani. 2021. "Monitoring Urban Deprived Areas with Remote Sensing and Machine Learning in Case of Disaster Recovery" Climate 9, no. 4: 58. https://doi.org/10.3390/cli9040058
APA StyleGhaffarian, S., & Emtehani, S. (2021). Monitoring Urban Deprived Areas with Remote Sensing and Machine Learning in Case of Disaster Recovery. Climate, 9(4), 58. https://doi.org/10.3390/cli9040058