
A Modal-Decay-Based Shock-Capturing Approach for High-Order Flux Reconstruction Method
Abstract
:1. Introduction
2. Numerical Methods
2.1. Governing Equations
2.2. Flux Reconstruction Method
3. Shock-Capturing Model
3.1. Modal-Decay-Based Discontinuity Sensor
| Algorithm 1: Discontinuity sensor of MDA |
|
1: function 2: Fix with baseline modal decay: 3: Construct a perfect modal decay as: 4: Modify the modal coefficients as: 5: Fix with skyline procedure: 6: Ensure the modal coefficients to be monotone as: 7: Least-squared procedure: 8: Compute the decay rate in a least-squared manner from the following problem: 9: return 10: end function |
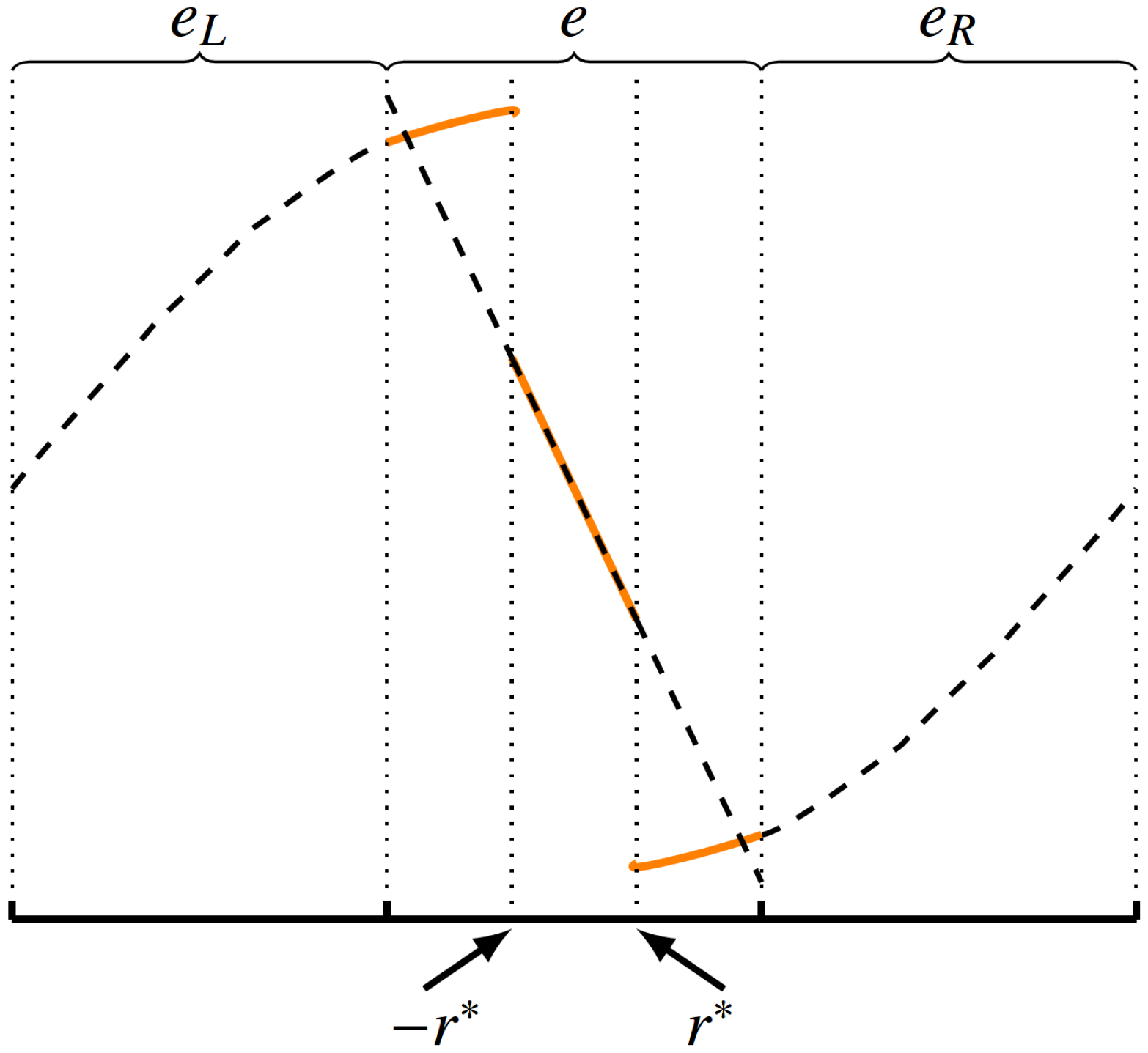
3.2. Extension to Arbitrary Orders
3.3. Localized Nonlinear Viscosity
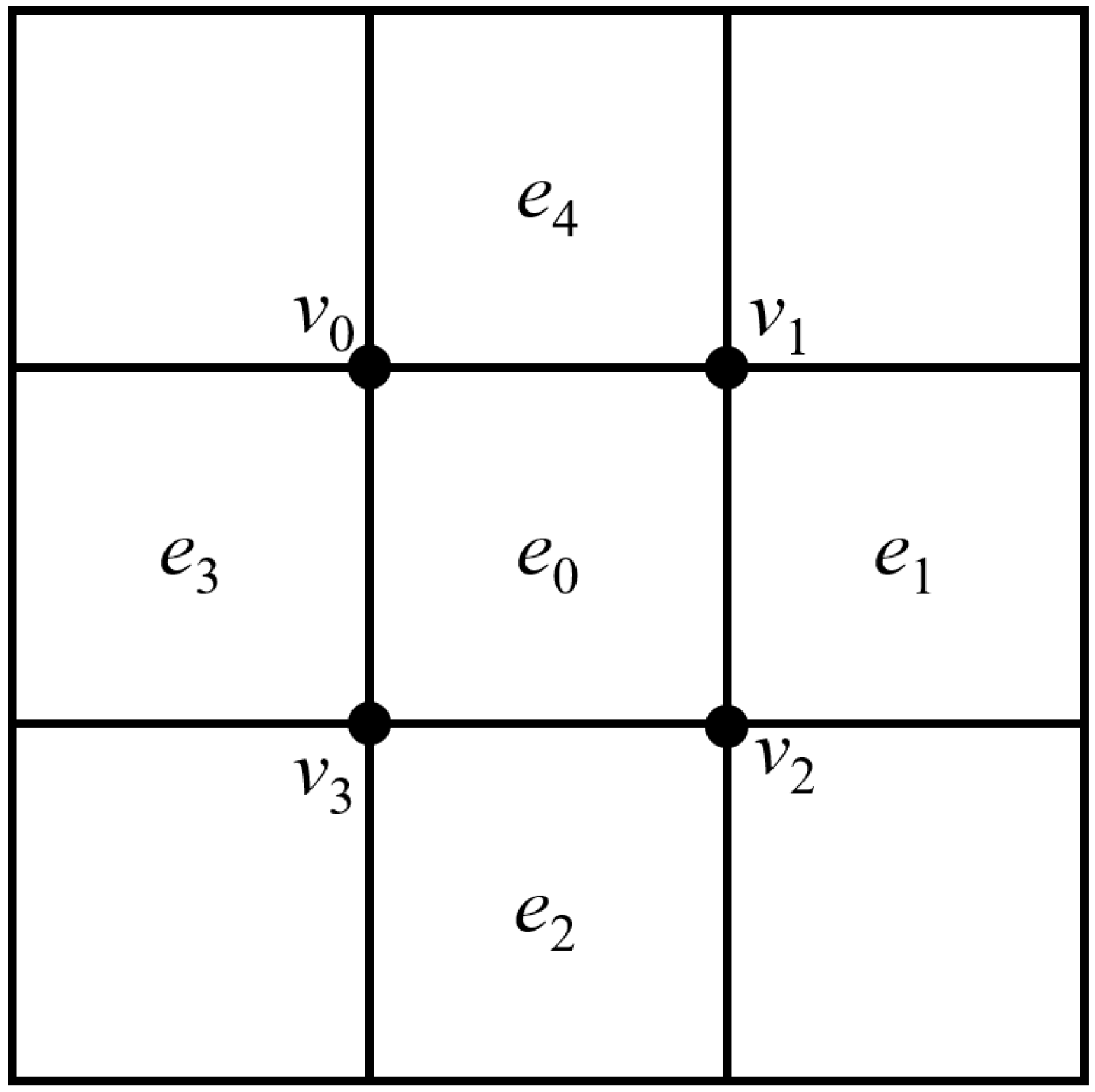
3.4. Multi-Dimensional Case
- Step 1. Extrapolate the polynomials of the four neighboring elements onto the current element .
- Step 2. Estimate a decay rate along each face of the current element using the one-dimensional approach. Take face as an example. The extrapolated are reduced to this face to serve as the two neighboring solutions in the 1D case. The same approach is applied to the remaining faces.
- Step 3. Choose the smallest one of all of the decay rates to be the decay rate of the element .
- Step 4. Compute the viscosity using Equation (23).
4. Numerical Results
4.1. Convergence Tests with Smooth Problems
4.1.1. One-Dimensional Linear Transport
4.1.2. Two-Dimensional Isentropic Vortex Convection
4.2. Shock-Dominated Problems
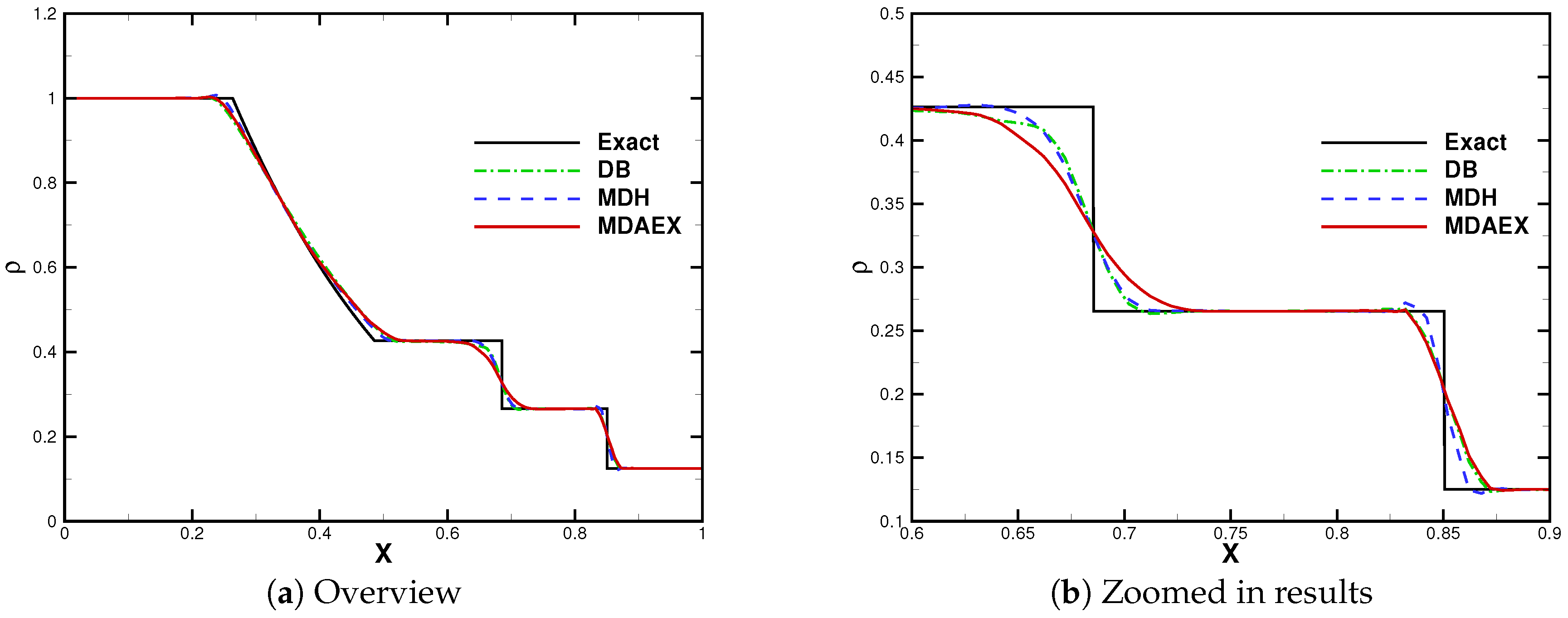
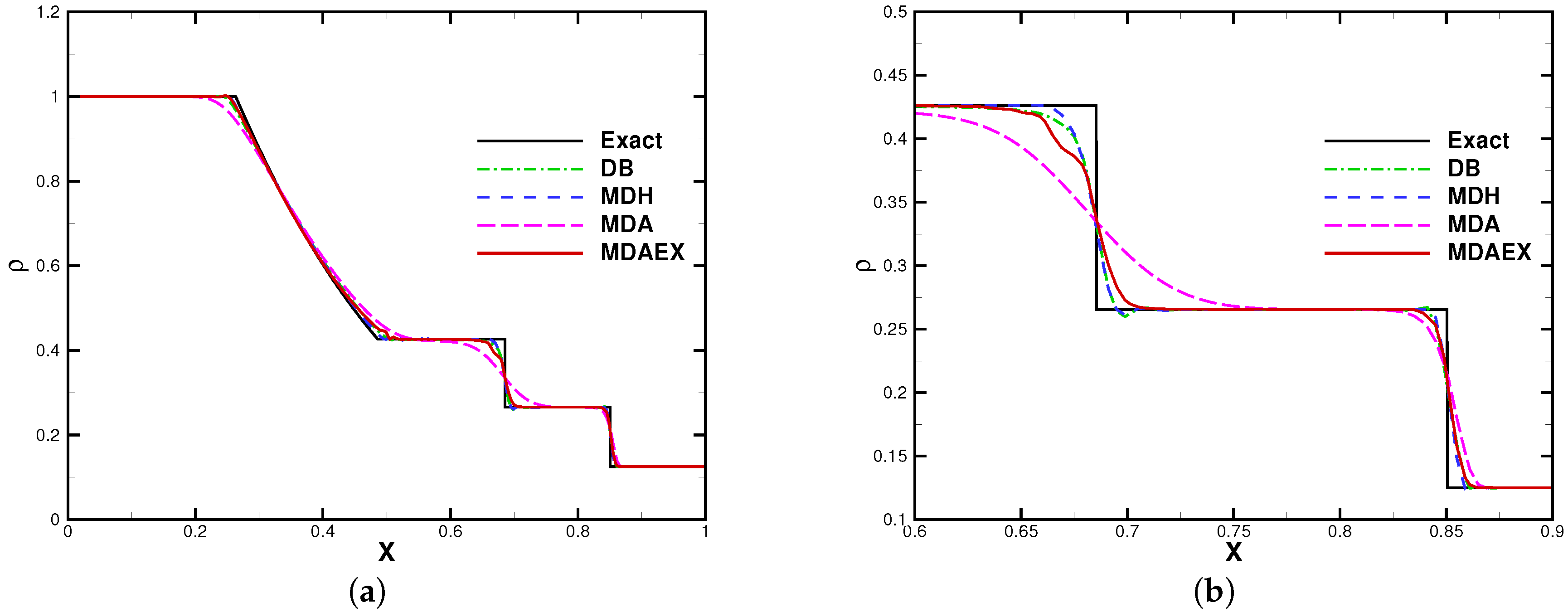
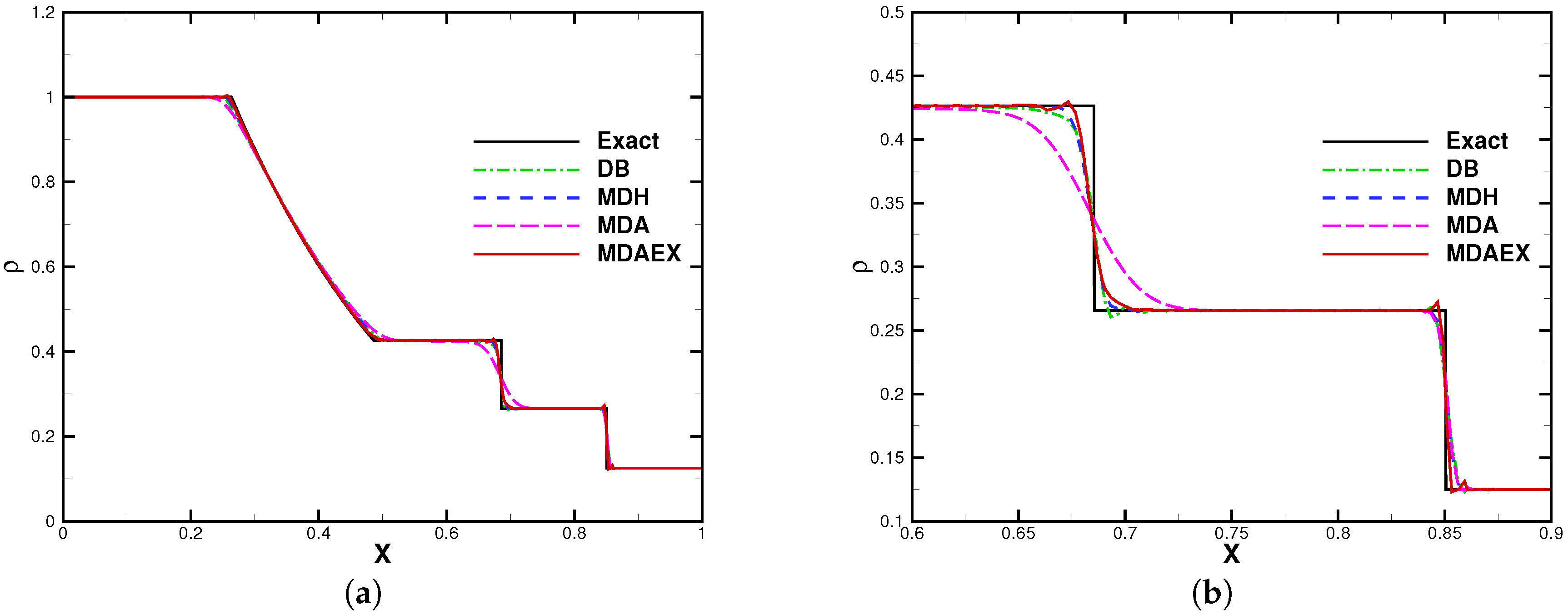
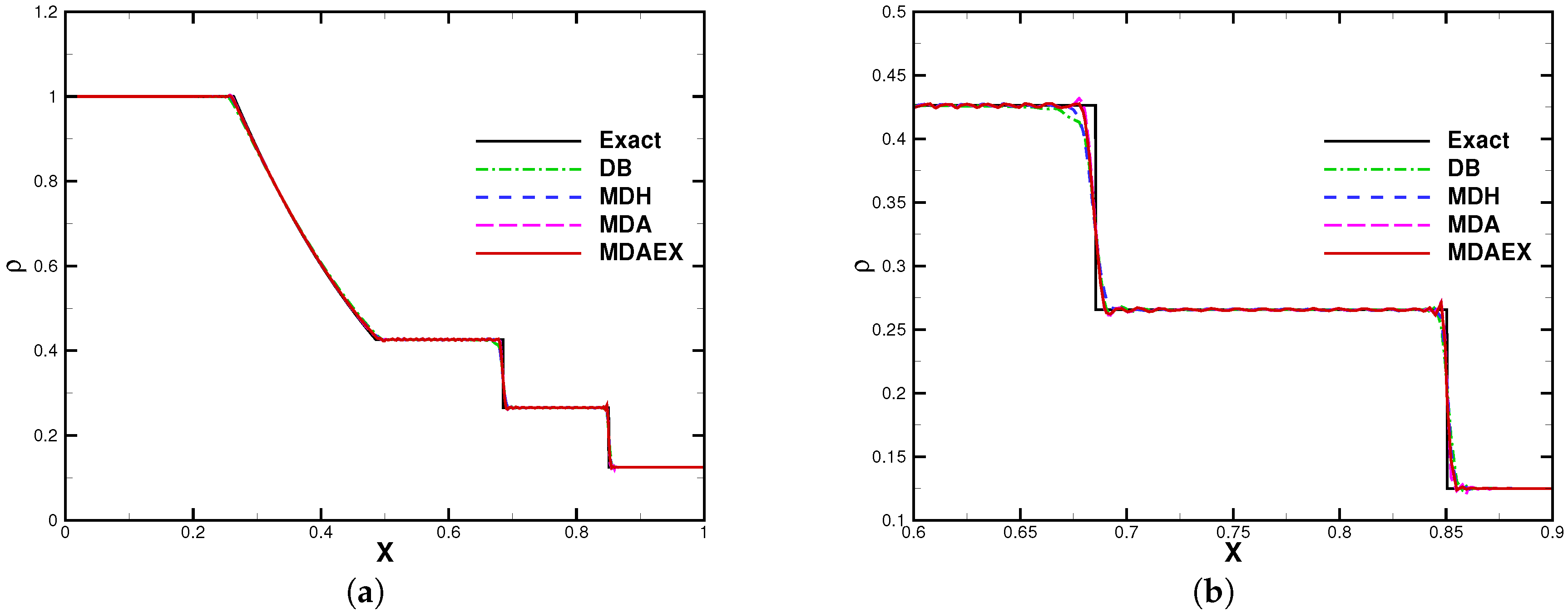
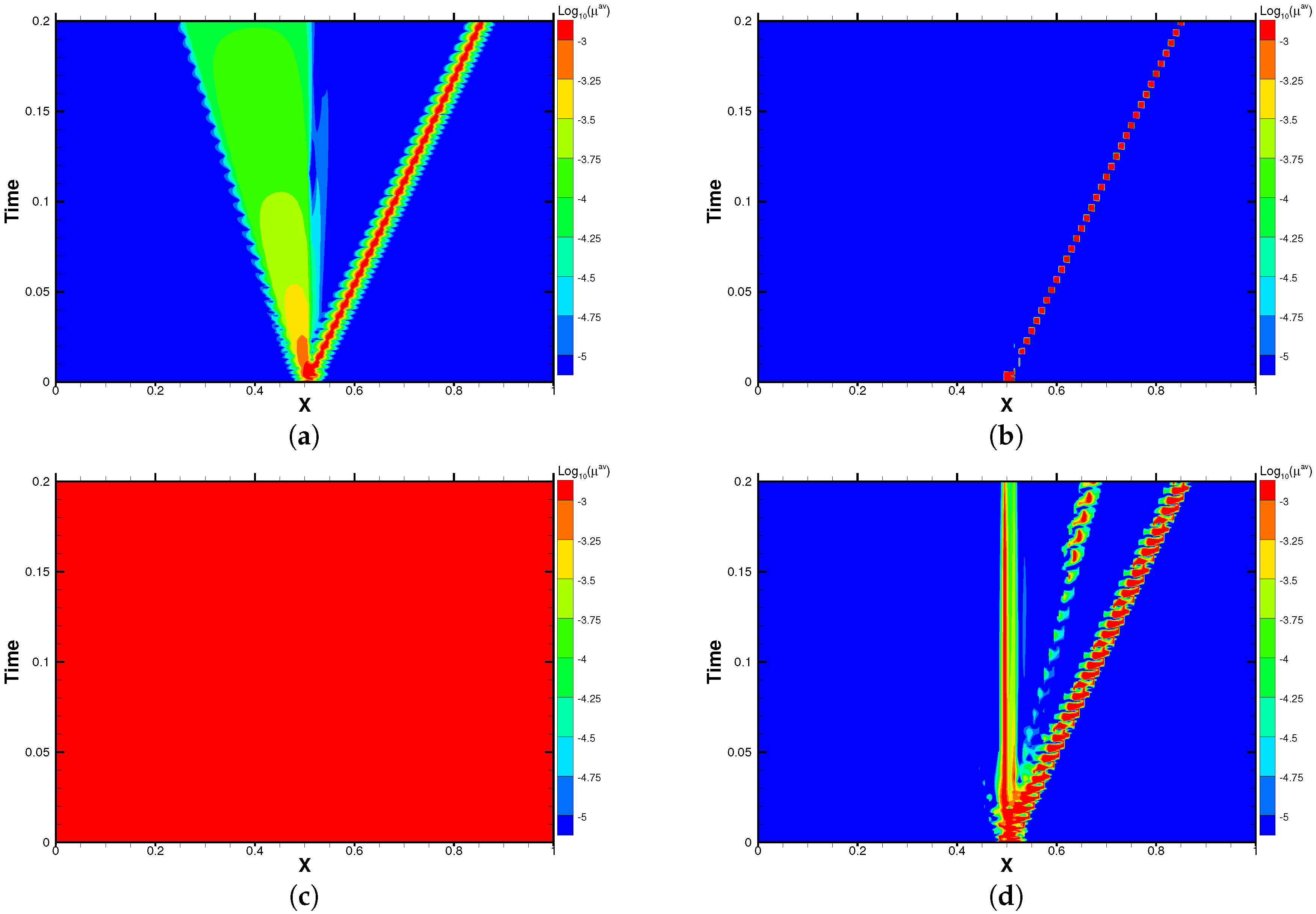
4.2.1. Sod Problem
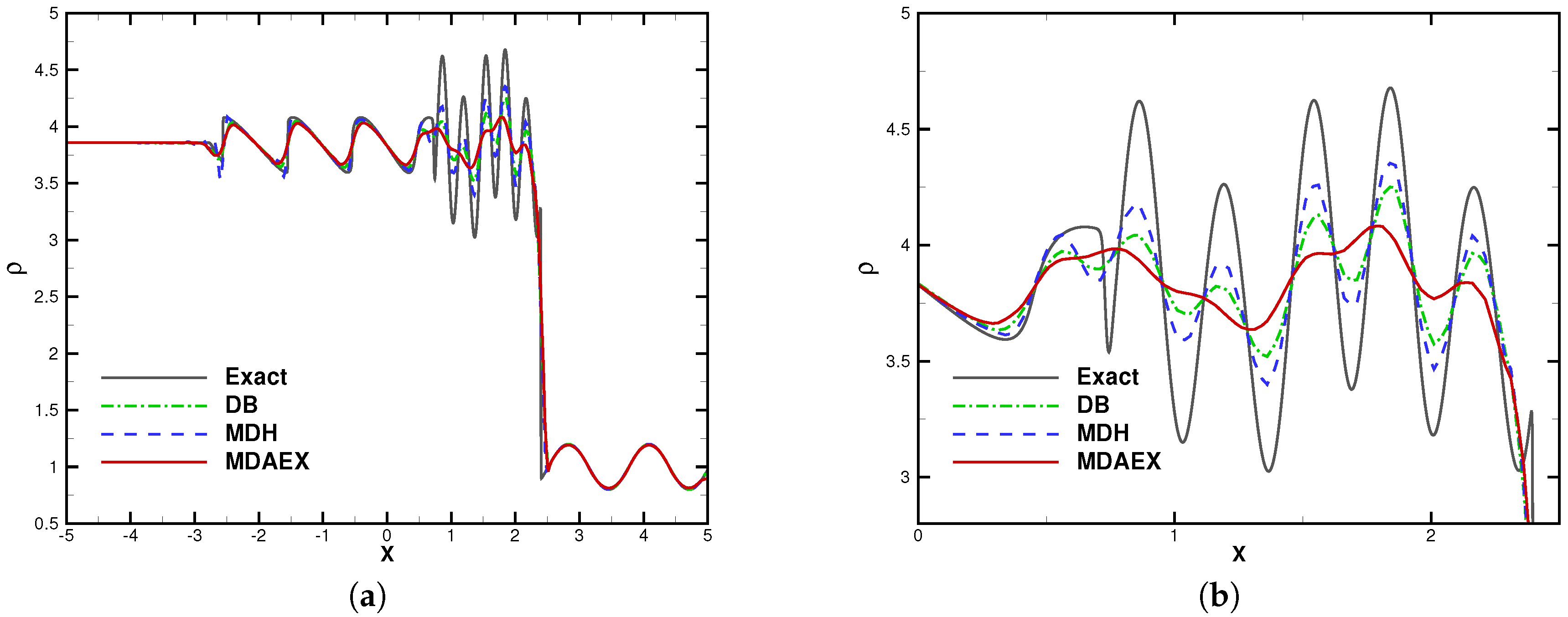
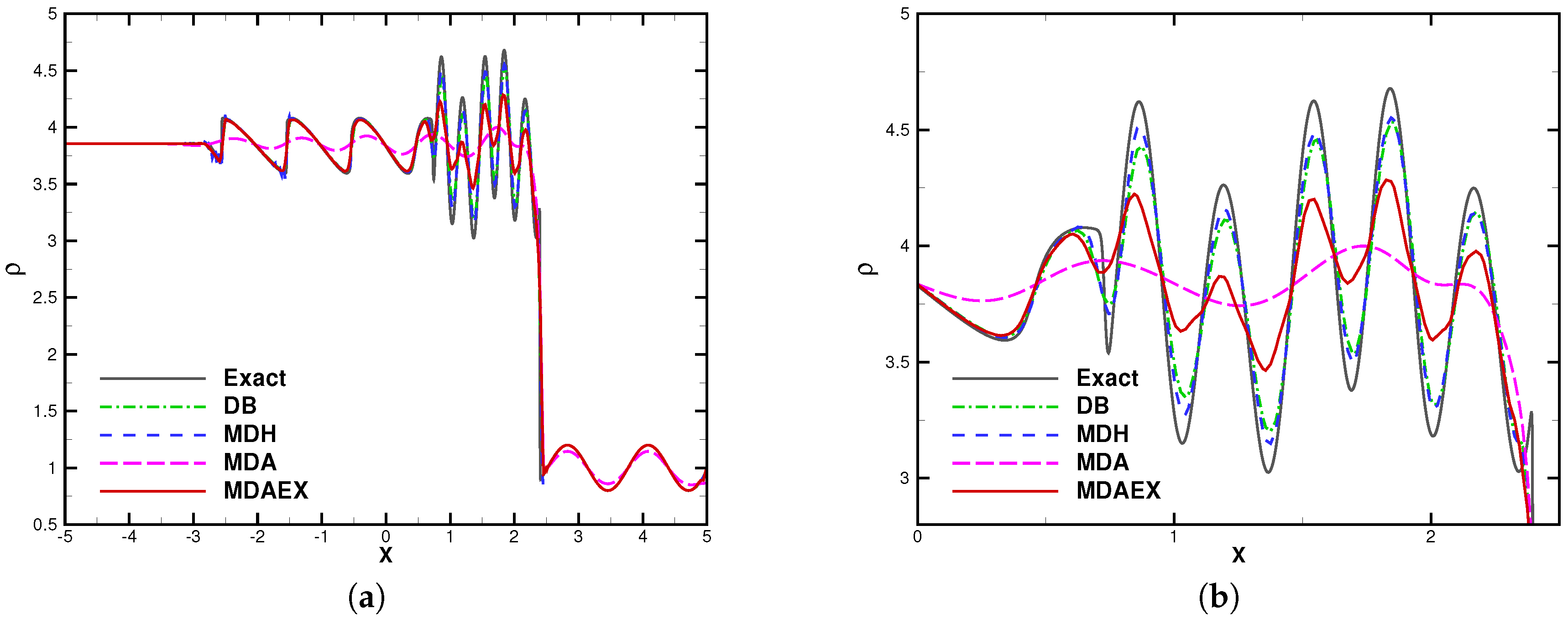
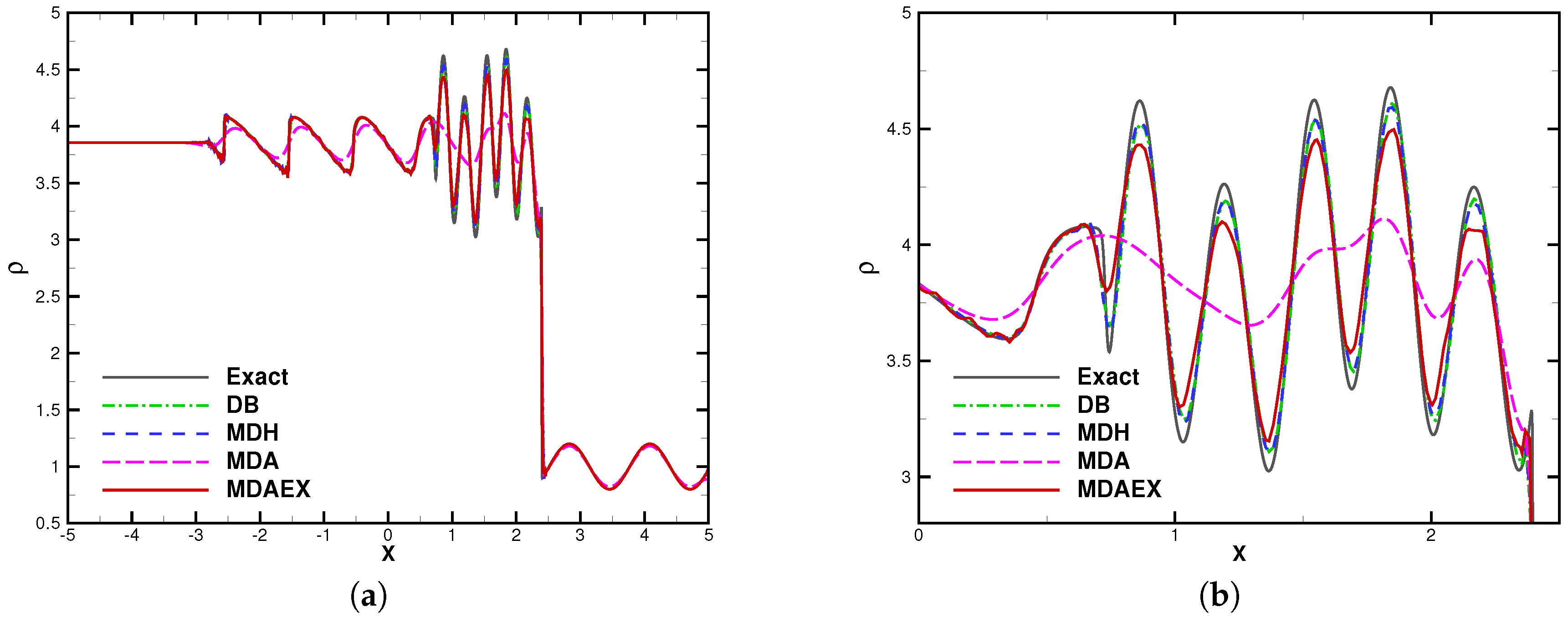
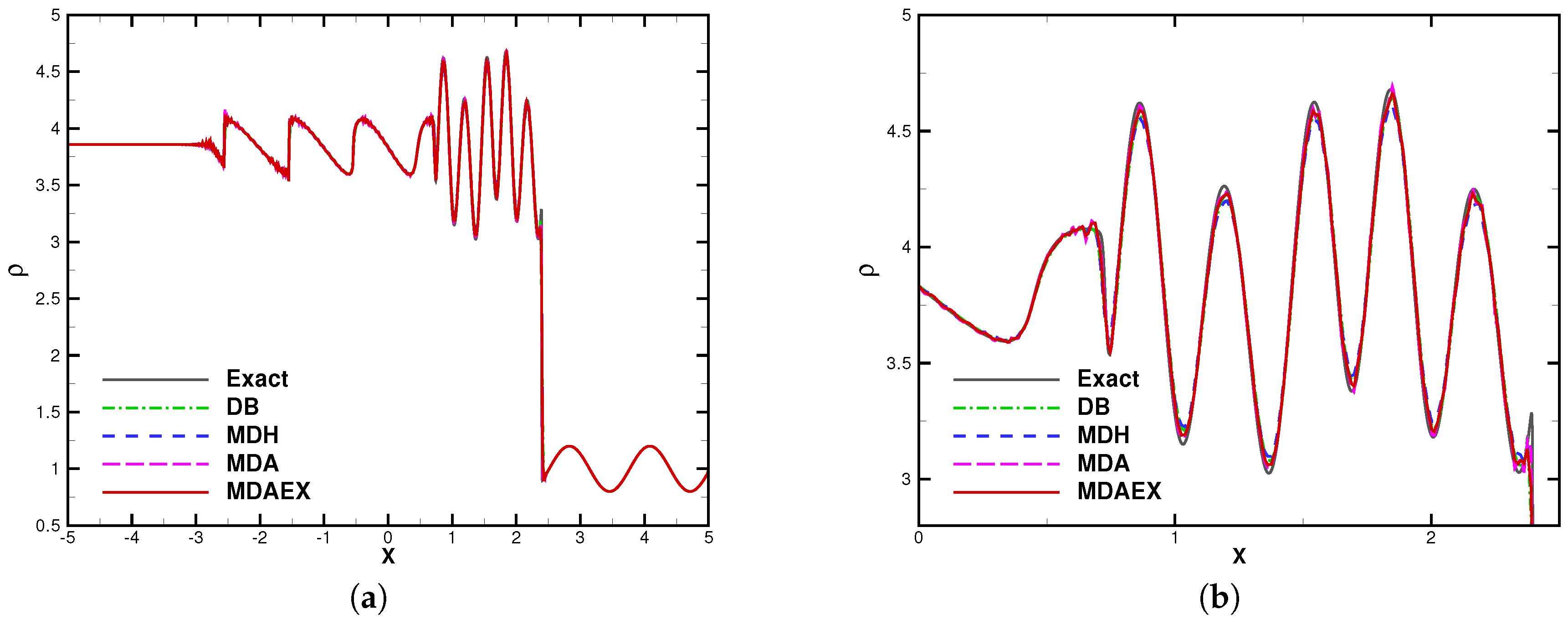
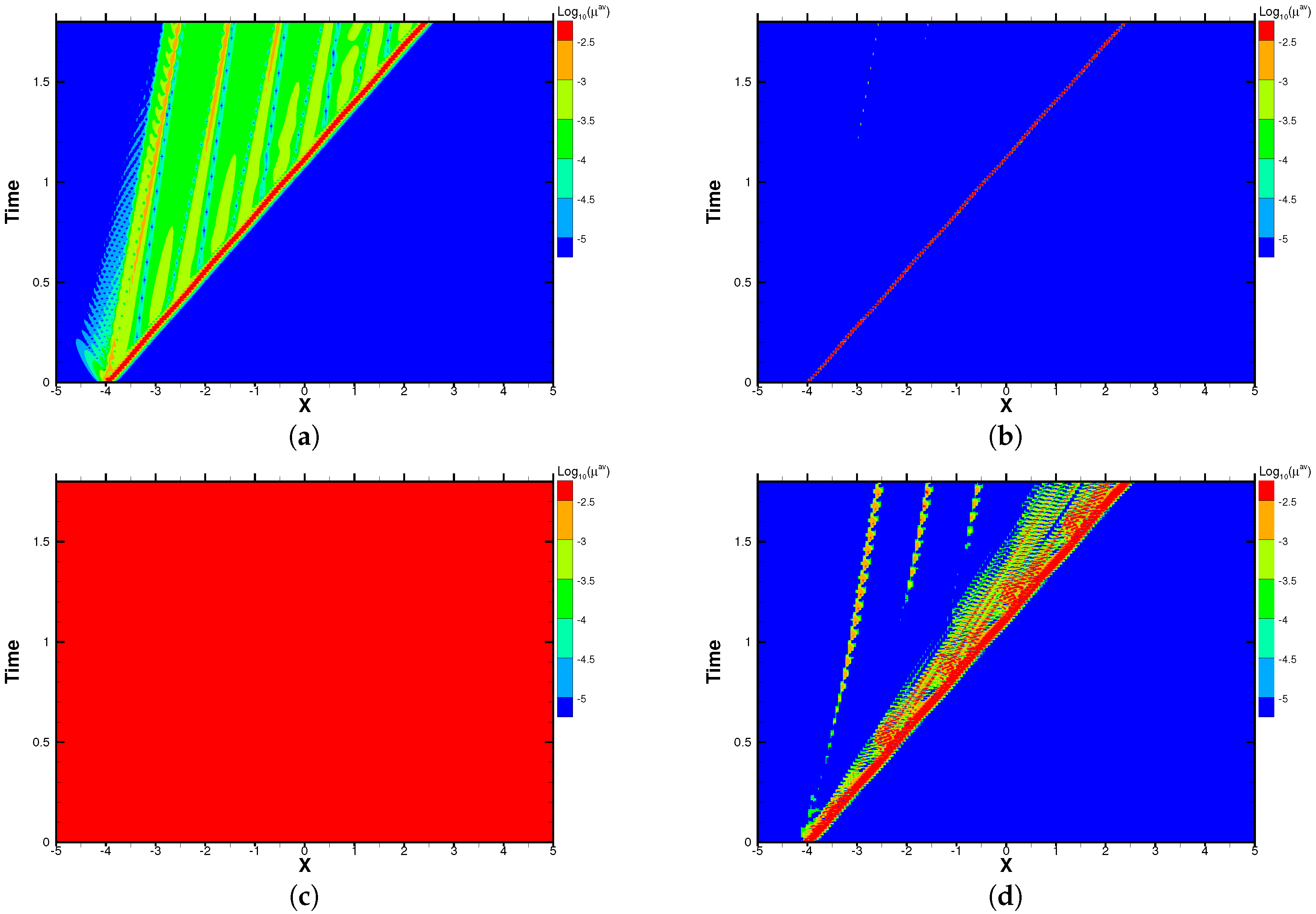
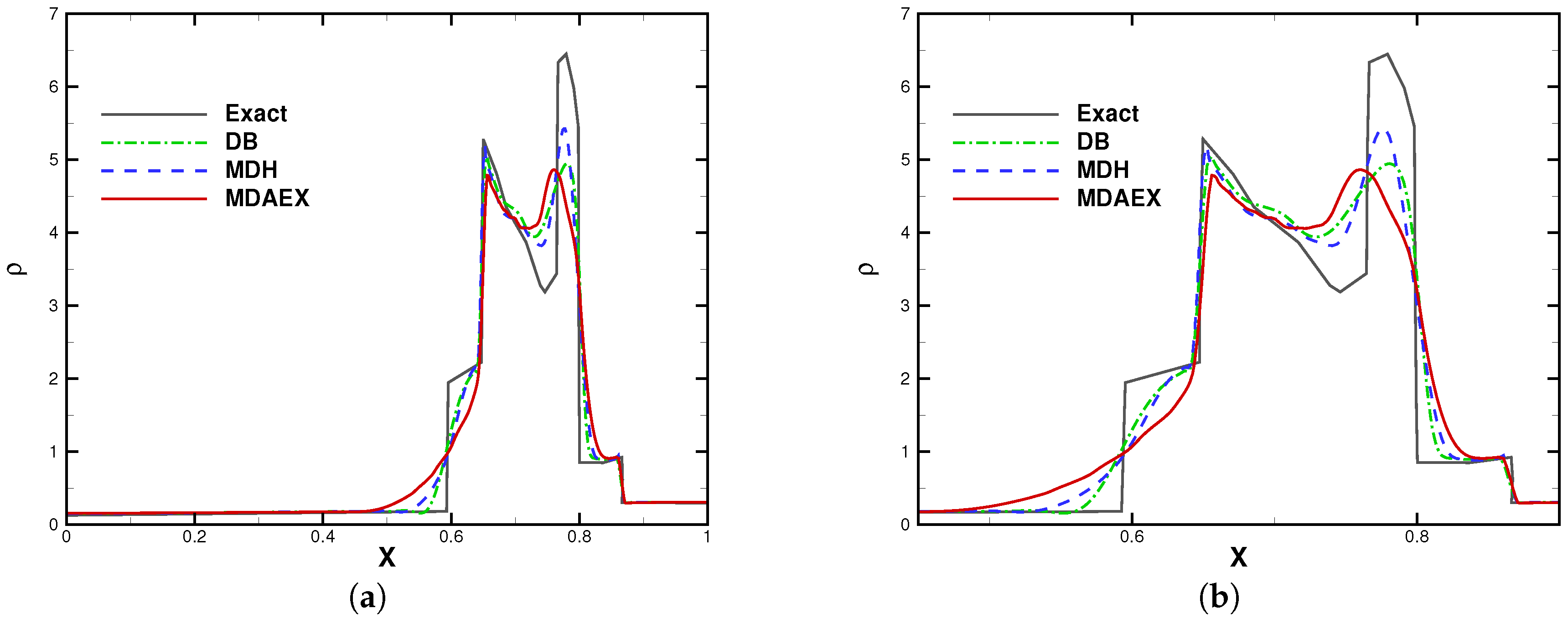
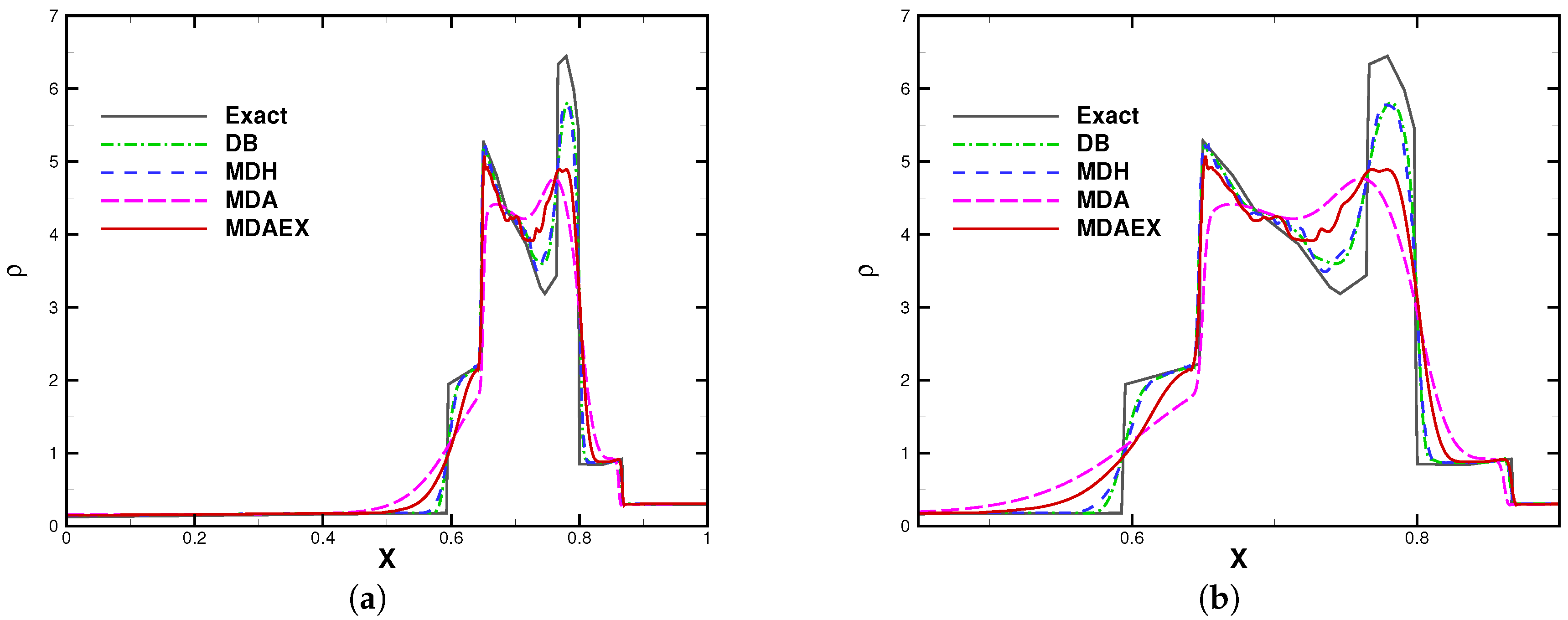
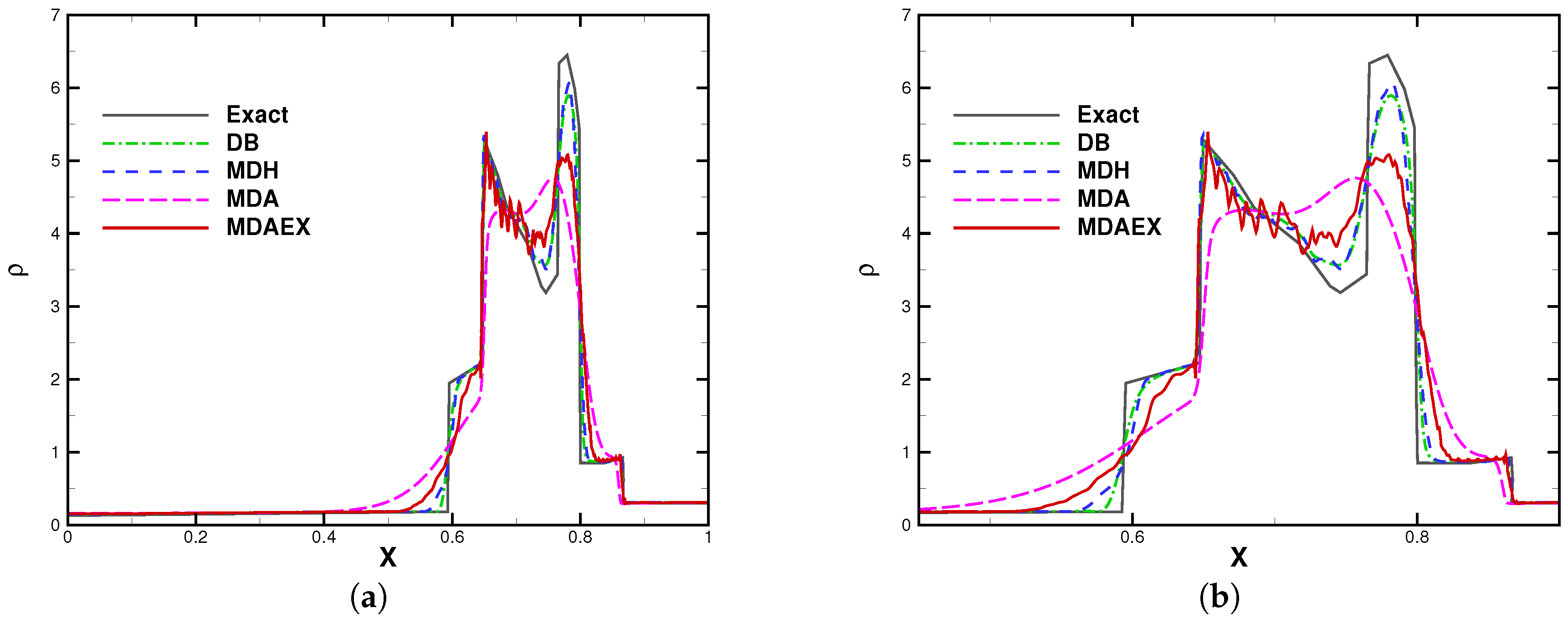
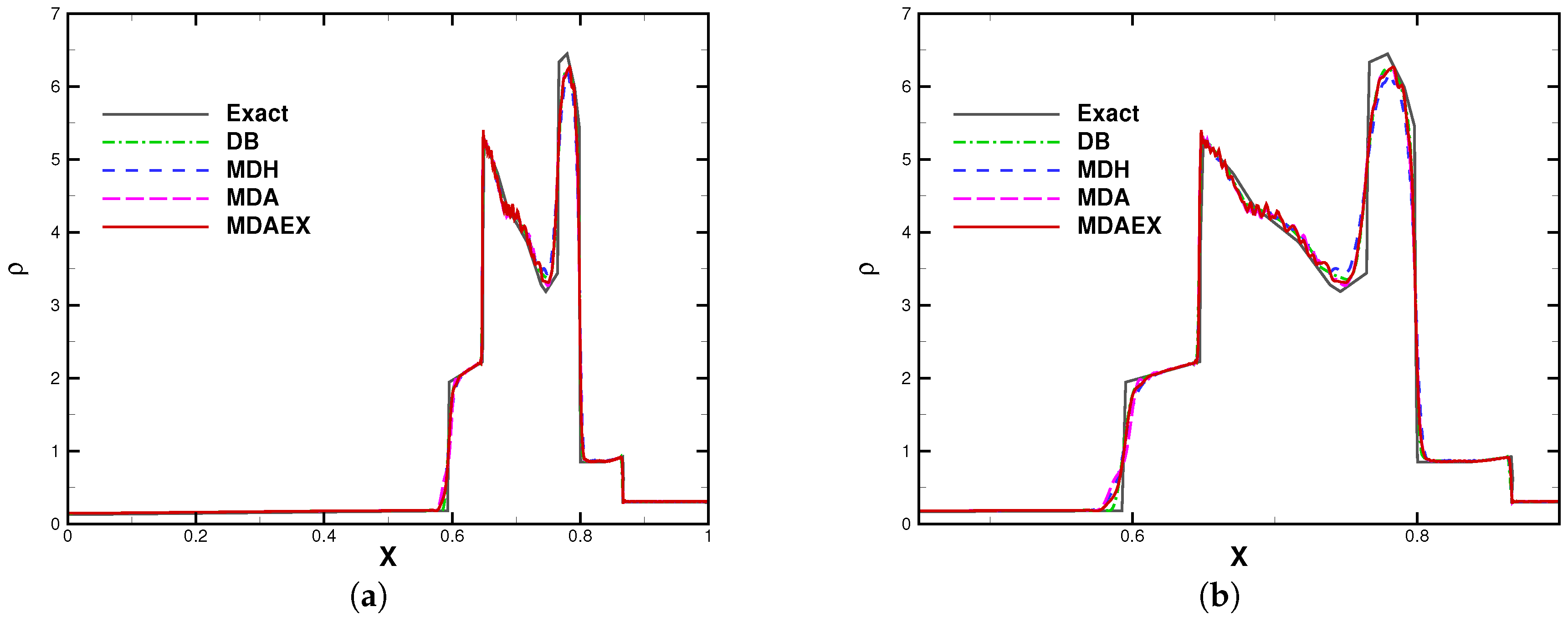
4.2.2. Shu–Osher Problem
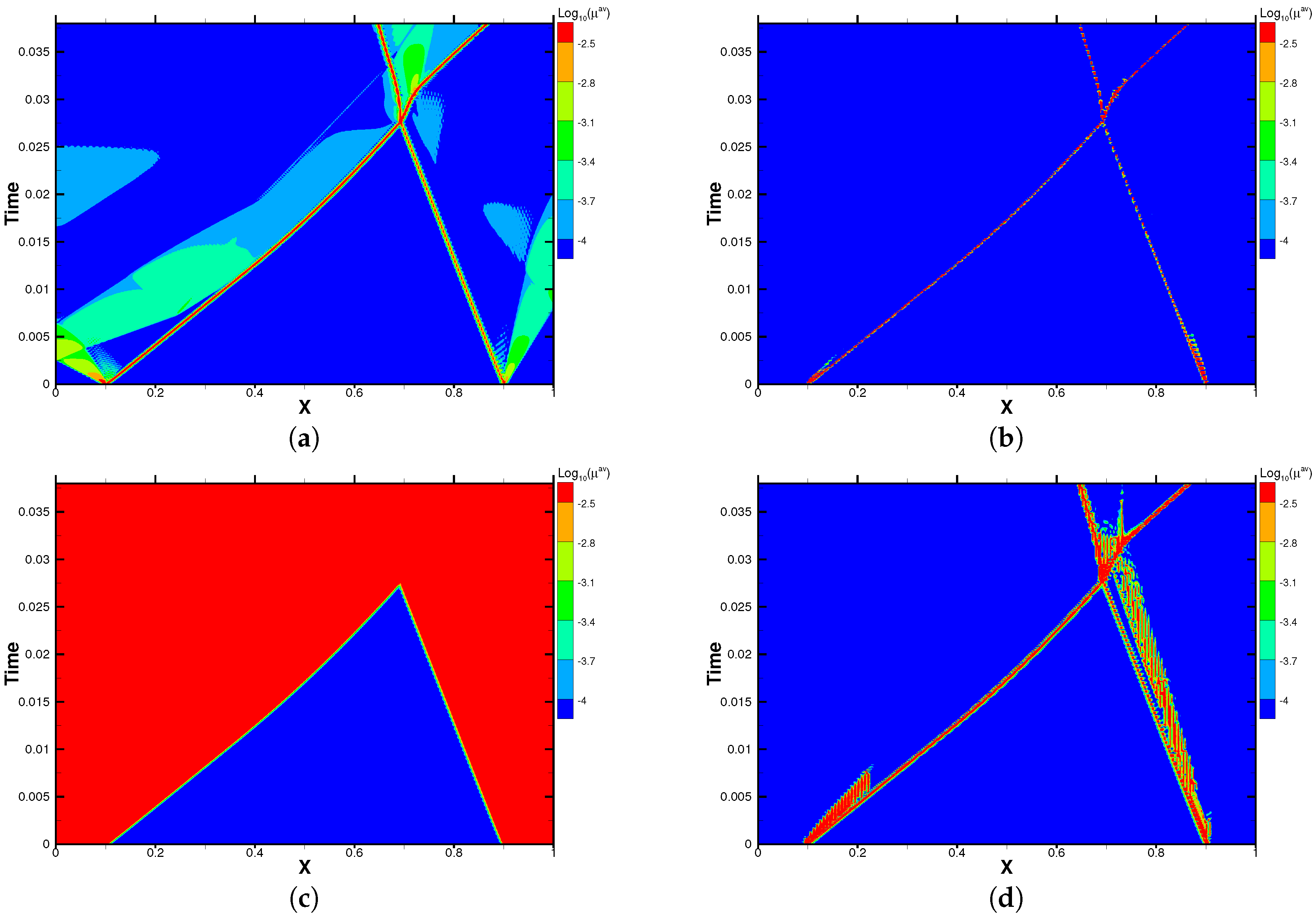
4.2.3. Blast Wave Problem
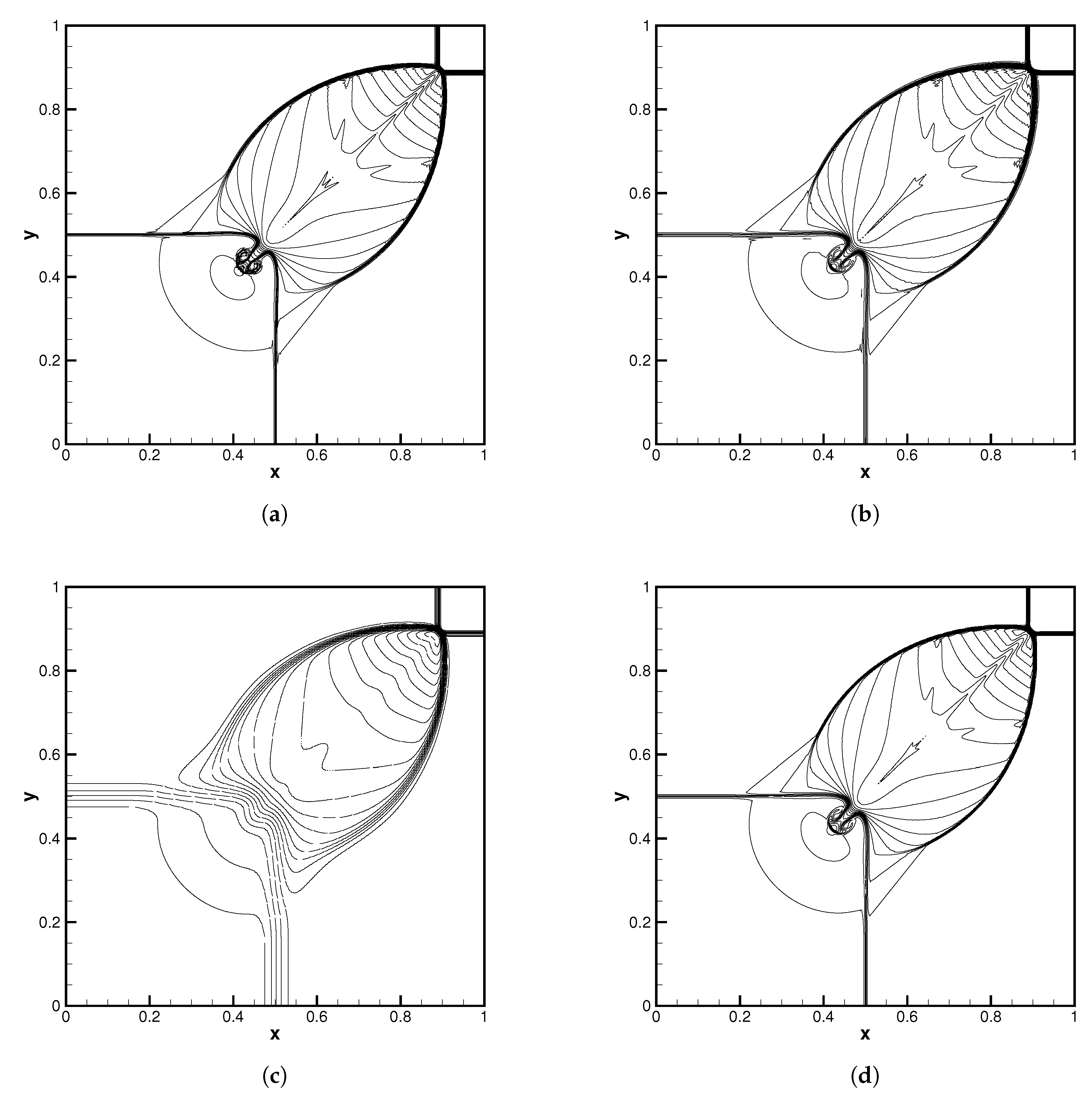
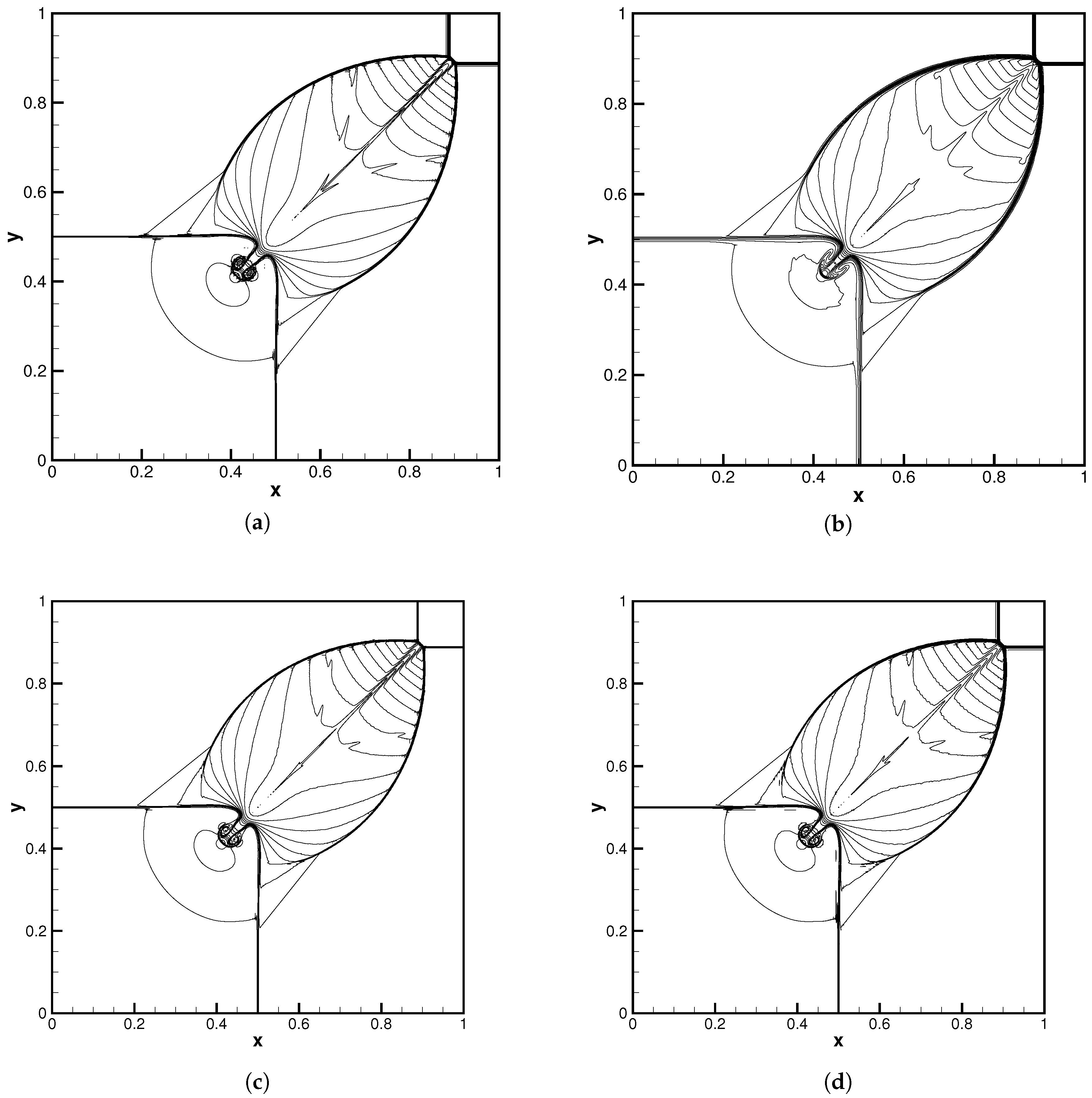
4.2.4. Two-Dimensional Riemann Problem
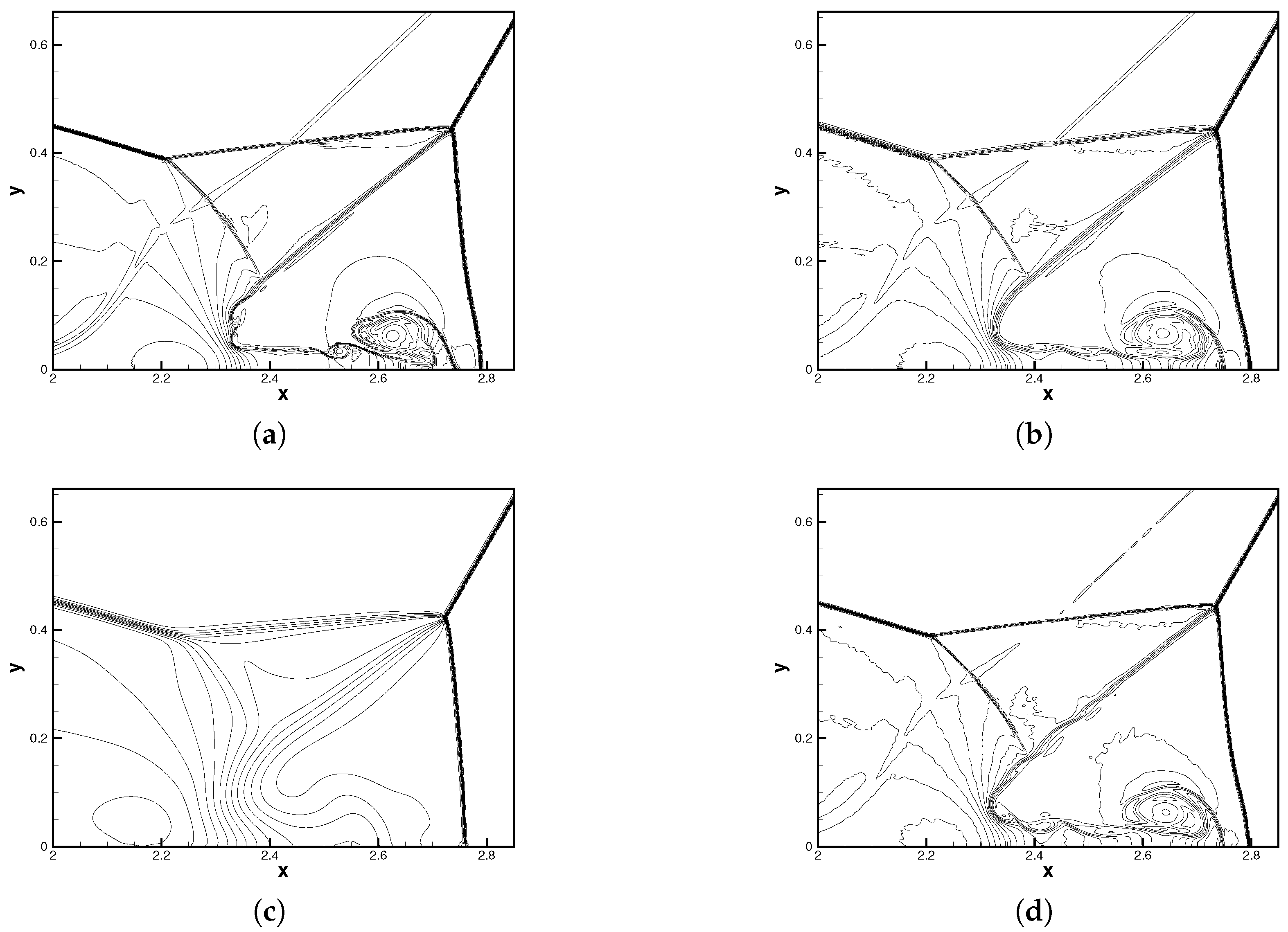
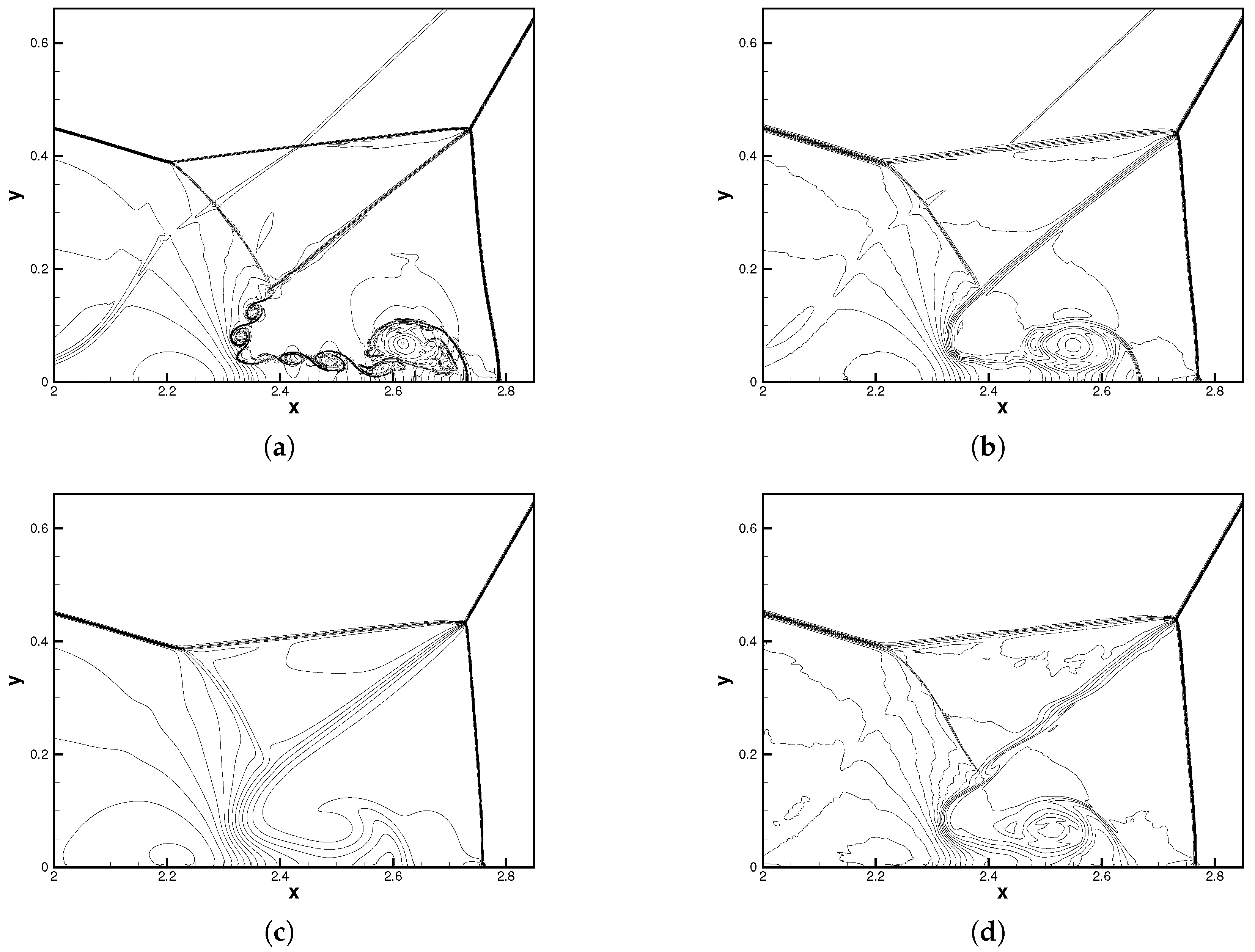
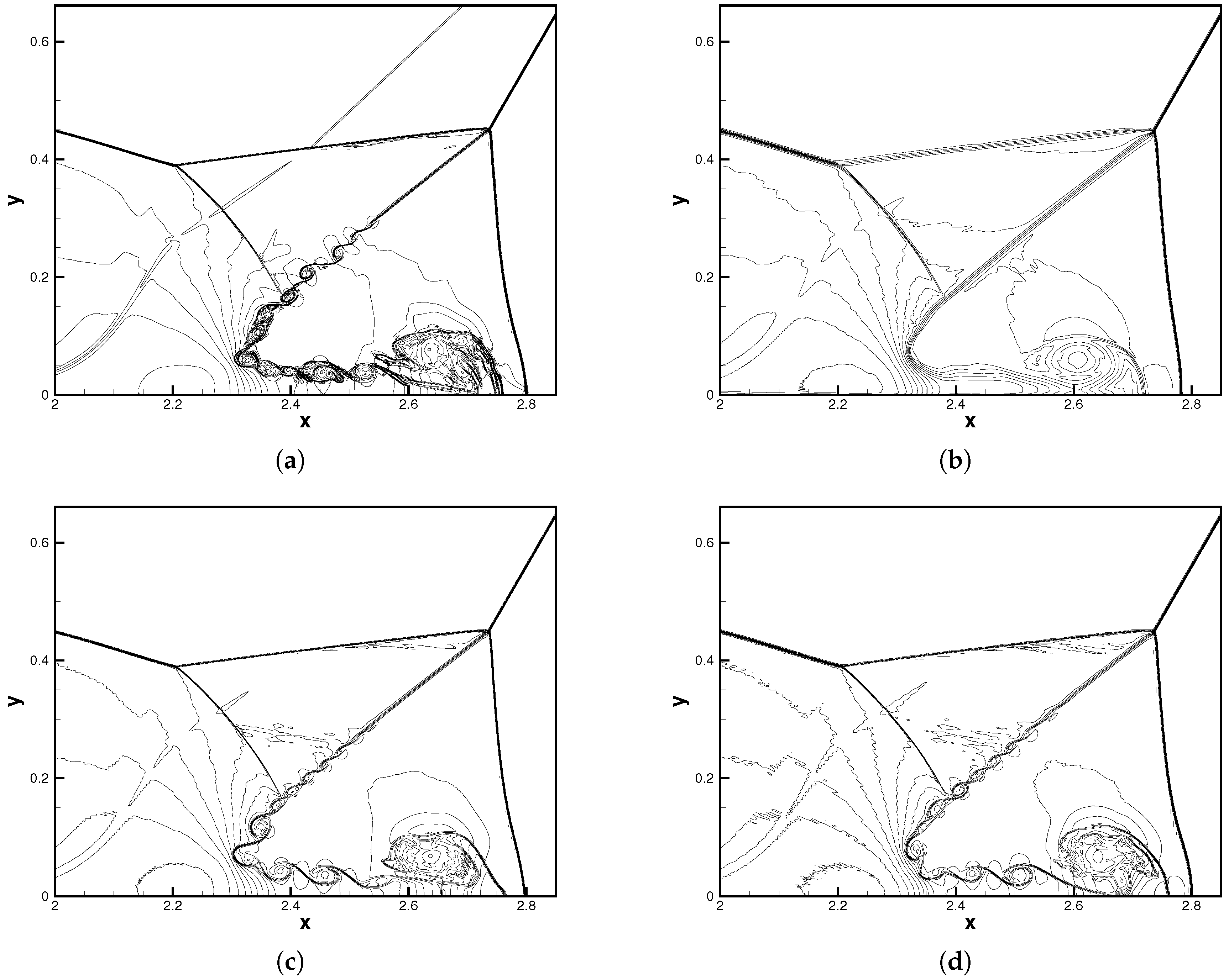
4.2.5. Double Mach Problem
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDA | averaged modal decay |
| MDH | highest modal decay |
| MDAEX | extended MDA |
| DB | dilation-based |
| DG | discontinuous Galerkin |
| SD | spectral difference |
| FR | flux reconstruction |
| CPR | correction procedure via reconstruction |
| WENO | weighted essentially non-oscillatory |
| HWENO | Hermite WENO |
| SPs | solution points |
| SSPRK54 | strong stability preserving five-stage fourth-order Runge–Kutta |
References
- Deng, X.; Mao, M.; Tu, G.; Liu, H.; Zhang, H. Geometric conservation law and applications to high-order finite difference schemes with stationary grids. J. Comput. Phys. 2011, 230, 1100–1115. [Google Scholar] [CrossRef]
- Friedrich, O. Weighted essentially non-oscillatory schemes for the interpolation of mean values on unstructured grids. J. Comput. Phys. 1998, 144, 194–212. [Google Scholar] [CrossRef]
- Cockburn, B.; Karniadakis, G.E.; Shu, C.W. Discontinuous Galerkin Methods: Theory, Computation and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 11. [Google Scholar]
- Liu, Y.; Vinokur, M.; Wang, Z. Spectral difference method for unstructured grids I: Basic formulation. J. Comput. Phys. 2006, 216, 780–801. [Google Scholar] [CrossRef]
- Huynh, H.T. A flux reconstruction approach to high-order schemes including discontinuous Galerkin methods. In Proceedings of the 18th AIAA Computational Fluid Dynamics Conference, Miami, FL, USA, 25–28 June 2007; Volume 1, pp. 698–739. [Google Scholar] [CrossRef]
- Haga, T.; Gao, H.; Wang, Z.J. A High-Order Unifying Discontinuous Formulation for the Navier-Stokes Equations on 3D Mixed Grids. Math. Model. Nat. Phenom. 2011, 6, 28–56. [Google Scholar] [CrossRef] [Green Version]
- Hesthaven, J.S. Numerical Methods for Conservation Laws: From Analysis to Algorithms; SIAM: Philadelphia, PA, USA, 2017. [Google Scholar]
- Cockburn, B.; Shu, C.W. The Runge–Kutta discontinuous Galerkin method for conservation laws V: Multidimensional systems. J. Comput. Phys. 1998, 141, 199–224. [Google Scholar] [CrossRef]
- Burbeau, A.; Sagaut, P.; Bruneau, C.H. A problem-independent limiter for high-order Runge–Kutta discontinuous Galerkin methods. J. Comput. Phys. 2001, 169, 111–150. [Google Scholar] [CrossRef]
- Krivodonova, L. Limiters for high-order discontinuous Galerkin methods. J. Comput. Phys. 2007, 226, 879–896. [Google Scholar] [CrossRef]
- Qiu, J.; Shu, C.W. A comparison of troubled-cell indicators for Runge–Kutta discontinuous Galerkin methods using weighted essentially nonoscillatory limiters. SIAM J. Sci. Comput. 2005, 27, 995–1013. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Shu, C.W. Runge–Kutta discontinuous Galerkin method using WENO limiters. SIAM J. Sci. Comput. 2005, 26, 907–929. [Google Scholar] [CrossRef]
- Zhu, J.; Qiu, J.; Shu, C.W.; Dumbser, M. Runge–Kutta discontinuous Galerkin method using WENO limiters II: Unstructured meshes. J. Comput. Phys. 2008, 227, 4330–4353. [Google Scholar] [CrossRef]
- Qiu, J.; Shu, C.W. Hermite WENO schemes and their application as limiters for Runge–Kutta discontinuous Galerkin method: One-dimensional case. J. Comput. Phys. 2004, 193, 115–135. [Google Scholar] [CrossRef]
- Qiu, J.; Shu, C.W. Hermite WENO schemes and their application as limiters for Runge–Kutta discontinuous Galerkin method II: Two dimensional case. Comput. Fluids 2005, 34, 642–663. [Google Scholar] [CrossRef]
- Zhu, J.; Qiu, J. Hermite WENO schemes and their application as limiters for Runge-Kutta discontinuous Galerkin method, III: Unstructured meshes. J. Sci. Comput. 2009, 39, 293–321. [Google Scholar] [CrossRef]
- Zhong, X.; Shu, C.W. A simple weighted essentially nonoscillatory limiter for Runge–Kutta discontinuous Galerkin methods. J. Comput. Phys. 2013, 232, 397–415. [Google Scholar] [CrossRef]
- Zhu, J.; Zhong, X.; Shu, C.W.; Qiu, J. Runge–Kutta discontinuous Galerkin method using a new type of WENO limiters on unstructured meshes. J. Comput. Phys. 2013, 248, 200–220. [Google Scholar] [CrossRef]
- Cook, A.W.; Cabot, W.H. A high-wavenumber viscosity for high-resolution numerical methods. J. Comput. Phys. 2004, 195, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Cook, A.W.; Cabot, W.H. Hyperviscosity for shock-turbulence interactions. J. Comput. Phys. 2005, 203, 379–385. [Google Scholar] [CrossRef]
- Fiorina, B.; Lele, S.K. An artificial nonlinear diffusivity method for supersonic reacting flows with shocks. J. Comput. Phys. 2007, 222, 246–264. [Google Scholar] [CrossRef] [Green Version]
- Kawai, S.; Lele, S.K. Localized artificial diffusivity scheme for discontinuity capturing on curvilinear meshes. J. Comput. Phys. 2008, 227, 9498–9526. [Google Scholar] [CrossRef]
- Mani, A.; Larsson, J.; Moin, P. Suitability of artificial bulk viscosity for large-eddy simulation of turbulent flows with shocks. J. Comput. Phys. 2009, 228, 7368–7374. [Google Scholar] [CrossRef]
- Premasuthan, S.; Liang, C.; Jameson, A. Computation of flows with shocks using the spectral difference method with artificial viscosity, I: Basic formulation and application. Comput. Fluids 2014, 98, 111–121. [Google Scholar] [CrossRef]
- Moro, D.; Nguyen, N.C.; Peraire, J. Dilation-based shock capturing for high-order methods. Int. J. Numer. Methods Fluids 2016, 82, 398–416. [Google Scholar] [CrossRef]
- Guermond, J.L.; Pasquetti, R.; Popov, B. Entropy viscosity method for nonlinear conservation laws. J. Comput. Phys. 2011, 230, 4248–4267. [Google Scholar] [CrossRef]
- Zingan, V.; Guermond, J.L.; Morel, J.; Popov, B. Implementation of the entropy viscosity method with the discontinuous Galerkin method. Comput. Methods Appl. Mech. Eng. 2013, 253, 479–490. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Jacobs, G.B.; Don, W.S.; Abbassi, H.; Mashayek, F. Explicit discontinuous spectral element method with entropy generation based artificial viscosity for shocked viscous flows. J. Comput. Phys. 2017, 332, 99–117. [Google Scholar] [CrossRef] [Green Version]
- Persson, P.O.; Peraire, J. Sub-cell shock capturing for discontinuous Galerkin methods. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; p. 112. [Google Scholar]
- Klöckner, A.; Warburton, T.; Hesthaven, J.S. Viscous shock capturing in a time-explicit discontinuous Galerkin method. Math. Model. Nat. Phenom. 2011, 6, 57–83. [Google Scholar] [CrossRef]
- Roe, P. Efficient construction and utilization of approximate Riemann solutions. Comput. Methods Appl. Sci. Eng. 1984, 6, 499–518. [Google Scholar]
- Peraire, J.; Persson, P.O. The compact discontinuous galerkin (CDG) method for elliptic problems. SIAM J. Sci. Comput. 2007, 30, 1806–1824. [Google Scholar] [CrossRef] [Green Version]
- Gottlieb, S. On high order strong stability preserving Runge-Kutta and multi step time discretizations. J. Sci. Comput. 2005, 25, 105–128. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Hesthaven, J.S. A study of several artificial viscosity models within the discontinuous galerkin framework. Commun. Comput. Phys. 2020, 27, 1309–1343. [Google Scholar]
- Spiegel, S.C.; Huynh, H.; DeBonis, J.R. A survey of the isentropic Euler vortex problem using high-order methods. In Proceedings of the 22nd AIAA Computational Fluid Dynamics Conference, Dallas, TX, USA, 22–26 June 2015; p. 2444. [Google Scholar]
- Lax, P.D.; Liu, X.D. Solution of two-dimensional Riemann problems of gas dynamics by positive schemes. SIAM J. Sci. Comput. 1998, 19, 319–340. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Linear | DB | MDH | MDA | MDAEX | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| L2 Error | Order | L2 Error | Order | L2 Error | Order | L2 Error | Order | L2 Error | Order | ||
| 10 | 2.85 × 10 | 5.61 × 10 | 6.79 × 10 | 6.93 × 10 | |||||||
| 20 | 3.76 × 10 | 2.92 | 3.55 × 10 | 0.66 | 5.66 × 10 | 0.26 | 6.70 × 10 | 0.05 | |||
| 40 | 4.77 × 10 | 2.98 | 1.46 × 10 | 1.28 | 3.16 × 10 | 0.84 | 4.88 × 10 | 0.46 | |||
| 80 | 5.98 × 10 | 2.99 | 4.70 × 10 | 1.63 | 1.74 × 10 | 0.86 | 2.58 × 10 | 0.92 | |||
| 160 | 7.49 × 10 | 3.00 | 1.31 × 10 | 1.84 | 8.79 × 10 | 0.99 | 7.49 × 10 | 15.07 | |||
| 320 | 9.37 × 10 | 3.00 | 3.39 × 10 | 1.95 | 4.22 × 10 | 1.06 | 9.37 × 10 | 3.00 | |||
| 10 | 1.17 × 10 | 3.49 × 10 | 1.17 × 10 | 6.82 × 10 | 6.52 × 10 | ||||||
| 20 | 3.77 × 10 | 4.96 | 1.45 × 10 | 1.27 | 3.77 × 10 | 4.96 | 6.07 × 10 | 0.17 | 5.33 × 10 | 0.29 | |
| 40 | 1.19 × 10 | 4.99 | 4.69 × 10 | 1.63 | 1.19 × 10 | 4.99 | 4.43 × 10 | 0.45 | 3.16 × 10 | 0.75 | |
| 80 | 3.71 × 10 | 5.00 | 1.31 × 10 | 1.84 | 3.71 × 10 | 5.00 | 2.75 × 10 | 0.69 | 3.71 × 10 | 26.34 | |
| 160 | 1.16 × 10 | 5.00 | 3.39 × 10 | 1.95 | 1.16 × 10 | 5.00 | 1.55 × 10 | 0.83 | 1.16 × 10 | 5.00 | |
| 320 | 3.81 × 10 | 4.92 | 8.54 × 10 | 1.99 | 3.81 × 10 | 4.92 | 8.21 × 10 | 0.91 | 3.81 × 10 | 4.92 | |
| 10 | 2.24 × 10 | 2.16 × 10 | 2.24 × 10 | 4.83 × 10 | 2.24 × 10 | ||||||
| 20 | 1.45 × 10 | 3.95 | 7.59 × 10 | 1.51 | 1.45 × 10 | 3.95 | 3.23 × 10 | 0.58 | 1.45 × 10 | 3.95 | |
| 40 | 9.11 × 10 | 3.99 | 2.25 × 10 | 1.75 | 9.11 × 10 | 3.99 | 1.91 × 10 | 0.76 | 9.11 × 10 | 3.99 | |
| 80 | 5.70 × 10 | 4.00 | 5.96 × 10 | 1.92 | 5.70 × 10 | 4.00 | 1.05 × 10 | 0.87 | 5.70 × 10 | 4.00 | |
| 160 | 3.59 × 10 | 3.99 | 1.51 × 10 | 1.98 | 3.59 × 10 | 3.99 | 5.48 × 10 | 0.93 | 3.59 × 10 | 3.99 | |
| 320 | 2.69 × 10 | 3.74 | 3.80 × 10 | 1.99 | 2.69 × 10 | 3.74 | 2.81 × 10 | 0.97 | 2.69 × 10 | 3.74 | |
| 10 | 4.54 × 10 | 1.43 × 10 | 4.54 × 10 | 4.54 × 10 | 4.54 × 10 | ||||||
| 20 | 1.45 × 10 | 4.97 | 4.64 × 10 | 1.62 | 1.45 × 10 | 4.97 | 1.45 × 10 | 4.97 | 1.45 × 10 | 4.97 | |
| 40 | 4.56 × 10 | 4.99 | 1.31 × 10 | 1.83 | 4.56 × 10 | 4.99 | 4.56 × 10 | 4.99 | 4.56 × 10 | 4.99 | |
| 80 | 1.48 × 10 | 4.95 | 3.38 × 10 | 1.95 | 1.48 × 10 | 4.95 | 1.48 × 10 | 4.95 | 1.48 × 10 | 4.95 | |
| 160 | 5.76 × 10 | 4.68 | 8.54 × 10 | 1.99 | 5.76 × 10 | 4.68 | 5.75 × 10 | 4.68 | 5.75 × 10 | 4.68 |
| N | Linear | DB | MDH | MDA | MDAEX | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| L2 Error | Order | L2 Error | Order | L2 Error | Order | L2 Error | Order | L2 Error | Order | ||
| 40 | 4.10 × 10 | 1.70 × 10 | 1.52 × 10 | 3.25 × 10 | |||||||
| 80 | 5.51 × 10 | 2.90 | 5.18 × 10 | 1.71 | 5.28 × 10 | 1.53 | 2.81 × 10 | 0.21 | |||
| 160 | 6.41 × 10 | 3.10 | 7.98 × 10 | 2.70 | 6.41 × 10 | 6.36 | 1.83 × 10 | 0.62 | |||
| 320 | 8.95 × 10 | 2.84 | 1.02 × 10 | 2.96 | 8.95 × 10 | 2.84 | 5.65 × 10 | 1.69 | |||
| 640 | 1.59 × 10 | 2.49 | 1.29 × 10 | 2.99 | 1.59 × 10 | 2.49 | 4.48 × 10 | 3.65 | |||
| 20 | 2.45 × 10 | 1.03 × 10 | 1.83 × 10 | 3.27 × 10 | 3.30 × 10 | ||||||
| 40 | 2.24 × 10 | 3.45 | 1.68 × 10 | 2.62 | 4.99 × 10 | 1.88 | 3.18 × 10 | 0.04 | 2.86 × 10 | 0.21 | |
| 80 | 3.18 × 10 | 2.81 | 1.88 × 10 | 3.16 | 3.18 × 10 | 7.29 | 2.96 × 10 | 0.10 | 1.41 × 10 | 1.02 | |
| 160 | 5.97 × 10 | 2.42 | 1.90 × 10 | 3.31 | 5.97 × 10 | 2.42 | 2.54 × 10 | 0.22 | 1.59 × 10 | 3.15 | |
| 320 | 1.10 × 10 | 2.43 | 1.86 × 10 | 3.35 | 1.10 × 10 | 2.43 | 1.92 × 10 | 0.40 | 1.10 × 10 | 10.49 | |
| 20 | 7.31 × 10 | 3.57 × 10 | 1.92 × 10 | 3.07 × 10 | 3.24 × 10 | ||||||
| 40 | 3.24 × 10 | 4.50 | 1.35 × 10 | 4.72 | 3.24 × 10 | 9.21 | 2.74 × 10 | 0.16 | 1.93 × 10 | 0.75 | |
| 80 | 6.70 × 10 | 5.60 | 2.65 × 10 | 5.68 | 6.70 × 10 | 5.60 | 2.20 × 10 | 0.32 | 6.70 × 10 | 14.81 | |
| 160 | 1.32 × 10 | 5.66 | 7.25 × 10 | 5.19 | 1.32 × 10 | 5.66 | 1.52 × 10 | 0.54 | 1.32 × 10 | 5.66 | |
| 320 | 4.99 × 10 | 4.73 | 2.18 × 10 | 5.06 | 4.99 × 10 | 4.73 | 9.13 × 10 | 0.73 | 4.99 × 10 | 4.73 | |
| 20 | 1.16 × 10 | 5.51 × 10 | 1.80 × 10 | 4.69 × 10 | 8.93 × 10 | ||||||
| 40 | 1.04 × 10 | 6.80 | 6.89 × 10 | 6.32 | 1.04 × 10 | 14.07 | 1.04 × 10 | 8.81 | 1.04 × 10 | 13.06 | |
| 80 | 6.10 × 10 | 4.10 | 2.11 × 10 | 5.03 | 6.10 × 10 | 4.10 | 6.10 × 10 | 4.10 | 6.10 × 10 | 4.10 | |
| 160 | 2.87 × 10 | 4.41 | 7.57 × 10 | 4.80 | 2.87 × 10 | 4.41 | 2.87 × 10 | 4.41 | 2.87 × 10 | 4.41 | |
| 320 | 1.89 × 10 | 3.93 | 2.89 × 10 | 4.71 | 1.89 × 10 | 3.93 | 1.89 × 10 | 3.93 | 1.89 × 10 | 3.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Yan, C.; Yu, J. A Modal-Decay-Based Shock-Capturing Approach for High-Order Flux Reconstruction Method. Aerospace 2023, 10, 14. https://doi.org/10.3390/aerospace10010014
Ma L, Yan C, Yu J. A Modal-Decay-Based Shock-Capturing Approach for High-Order Flux Reconstruction Method. Aerospace. 2023; 10(1):14. https://doi.org/10.3390/aerospace10010014
Chicago/Turabian StyleMa, Libin, Chao Yan, and Jian Yu. 2023. "A Modal-Decay-Based Shock-Capturing Approach for High-Order Flux Reconstruction Method" Aerospace 10, no. 1: 14. https://doi.org/10.3390/aerospace10010014
APA StyleMa, L., Yan, C., & Yu, J. (2023). A Modal-Decay-Based Shock-Capturing Approach for High-Order Flux Reconstruction Method. Aerospace, 10(1), 14. https://doi.org/10.3390/aerospace10010014