
Fast Inverse Design of Transonic Airfoils by Combining Deep Learning and Efficient Global Optimization



Abstract
:1. Introduction
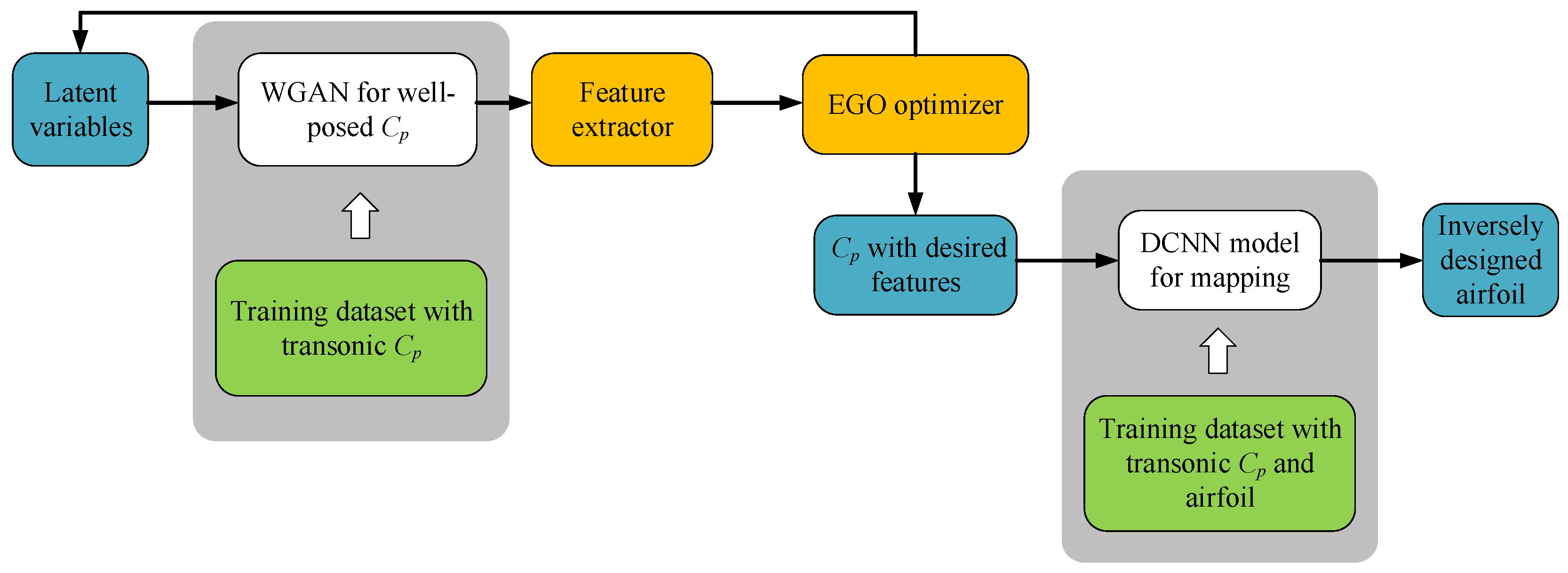
2. Methodology
2.1. Dataset Preparation
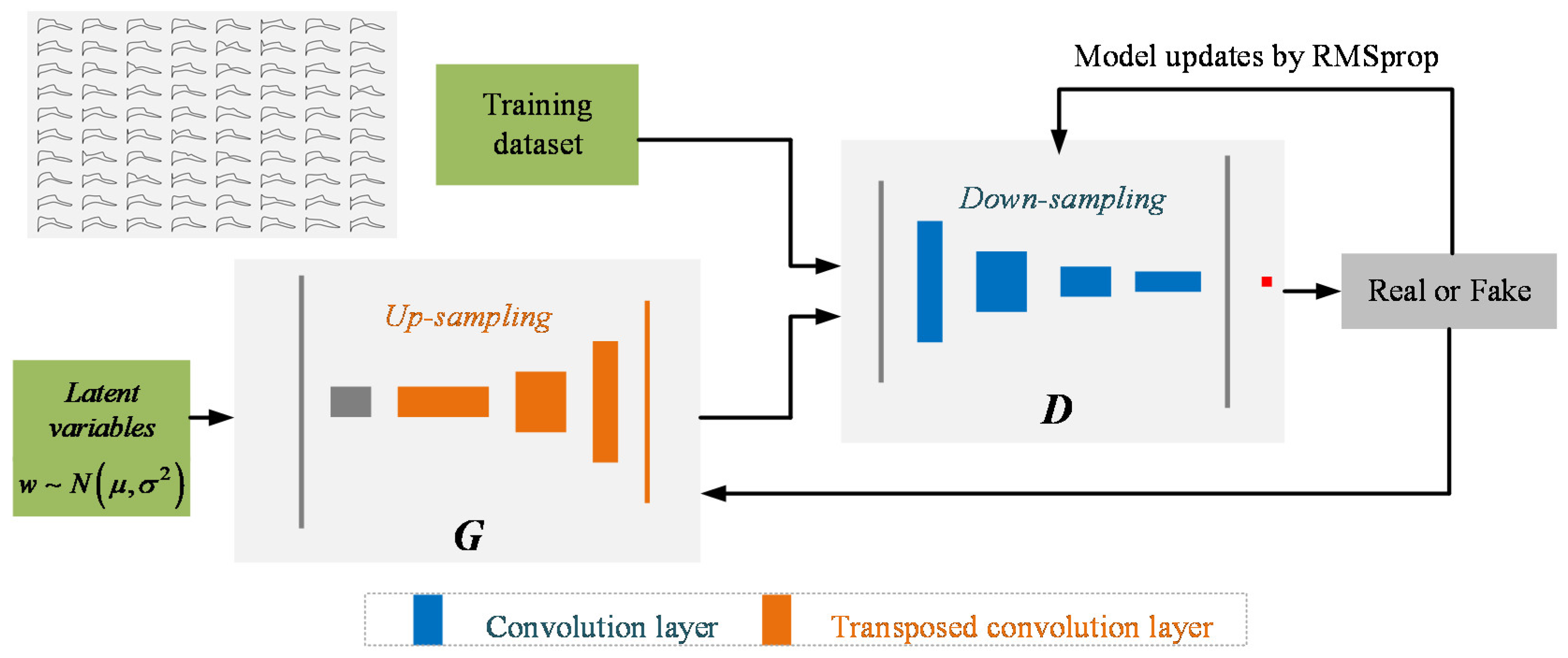
2.2. WGAN for Well-Posed Pressure Distributions
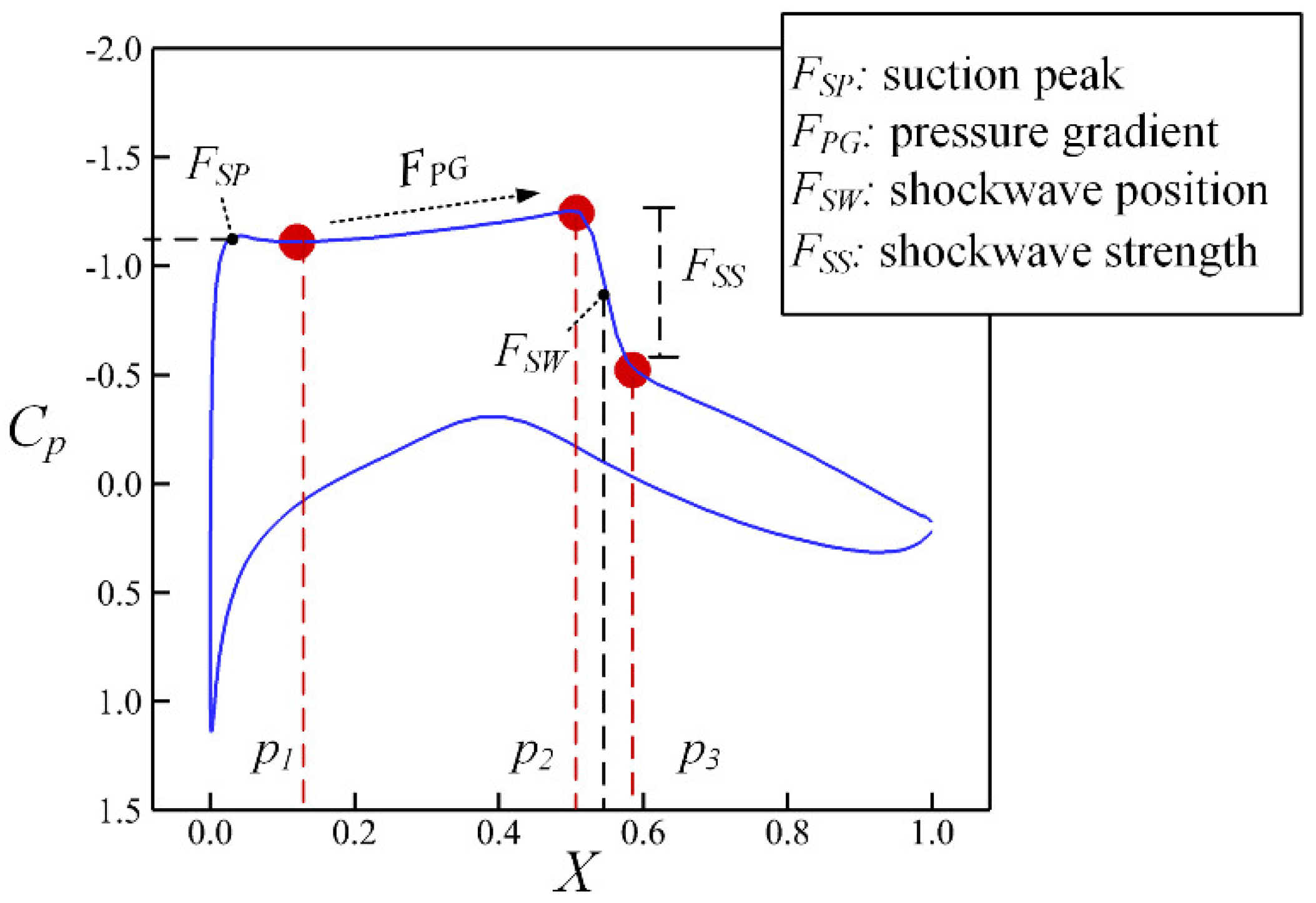
2.3. Definition of Pressure Distribution
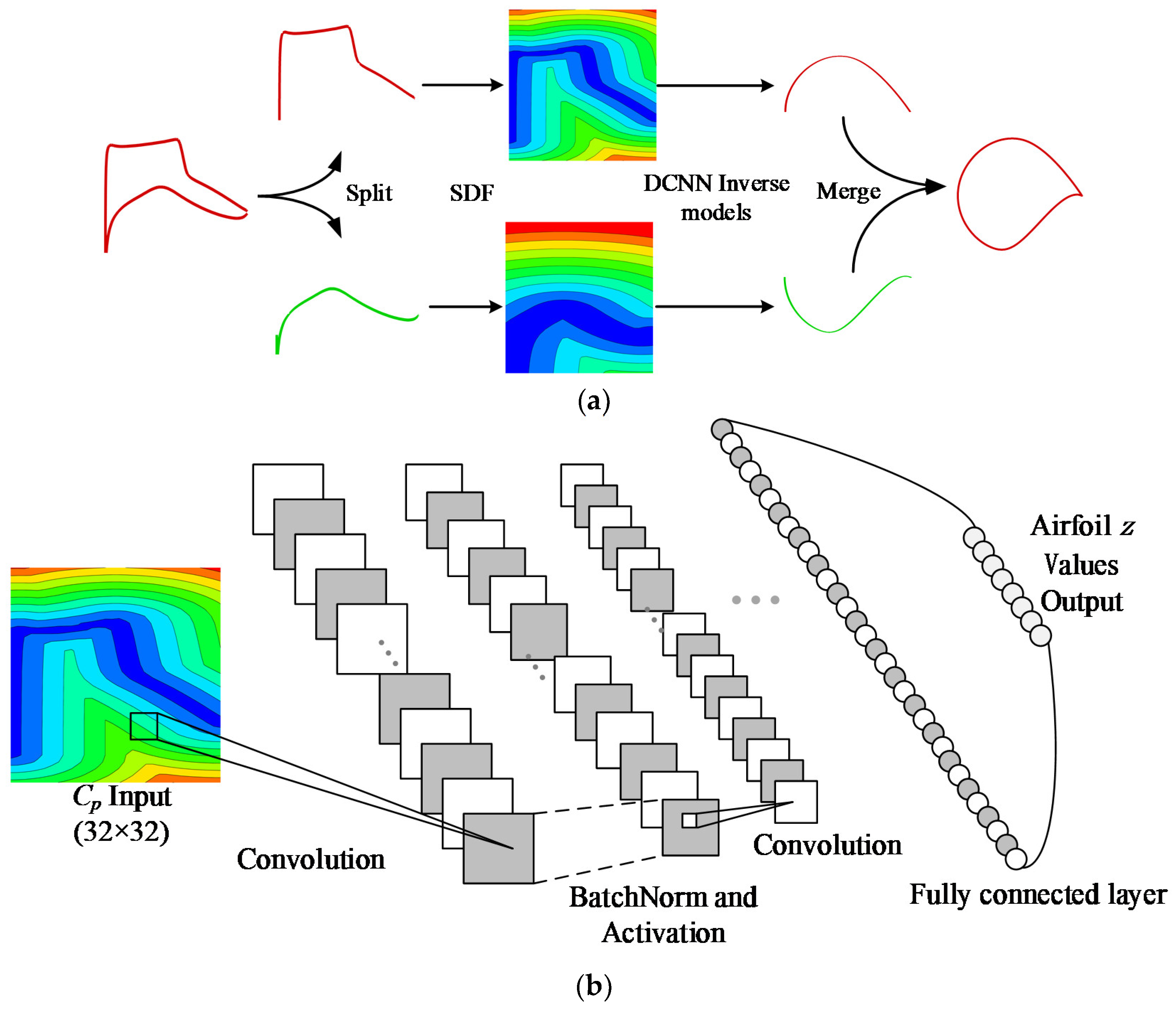
2.4. DCNN Model for Airfoil Geometry
3. Model Training and Performance Analysis
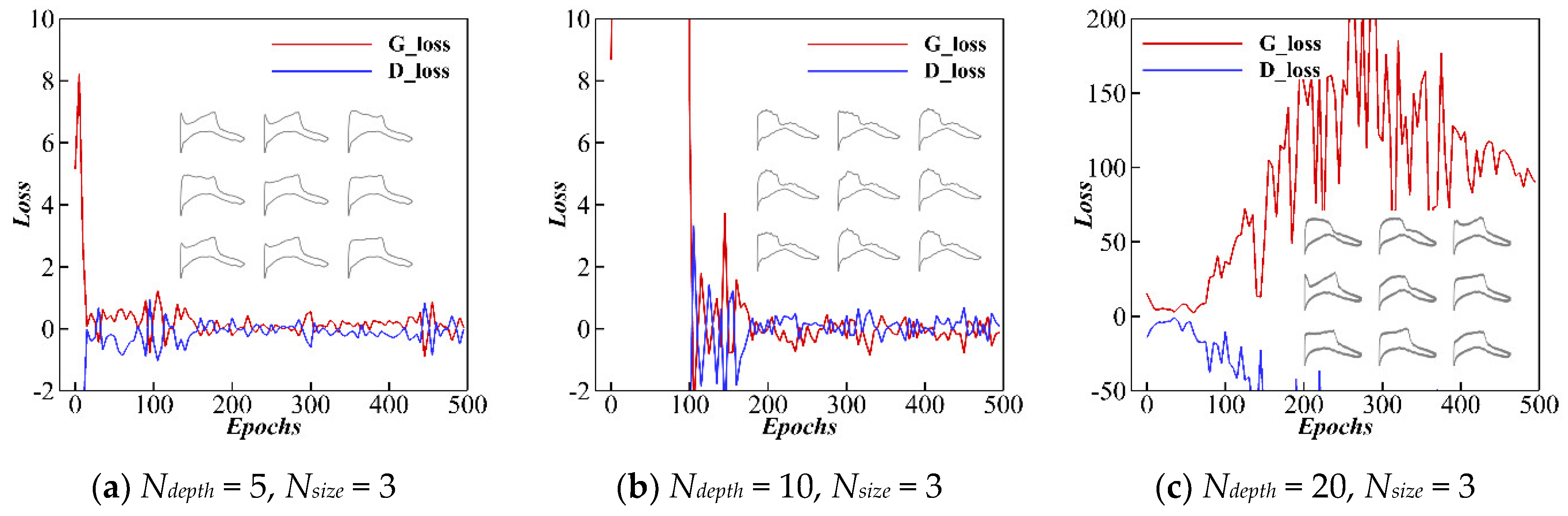
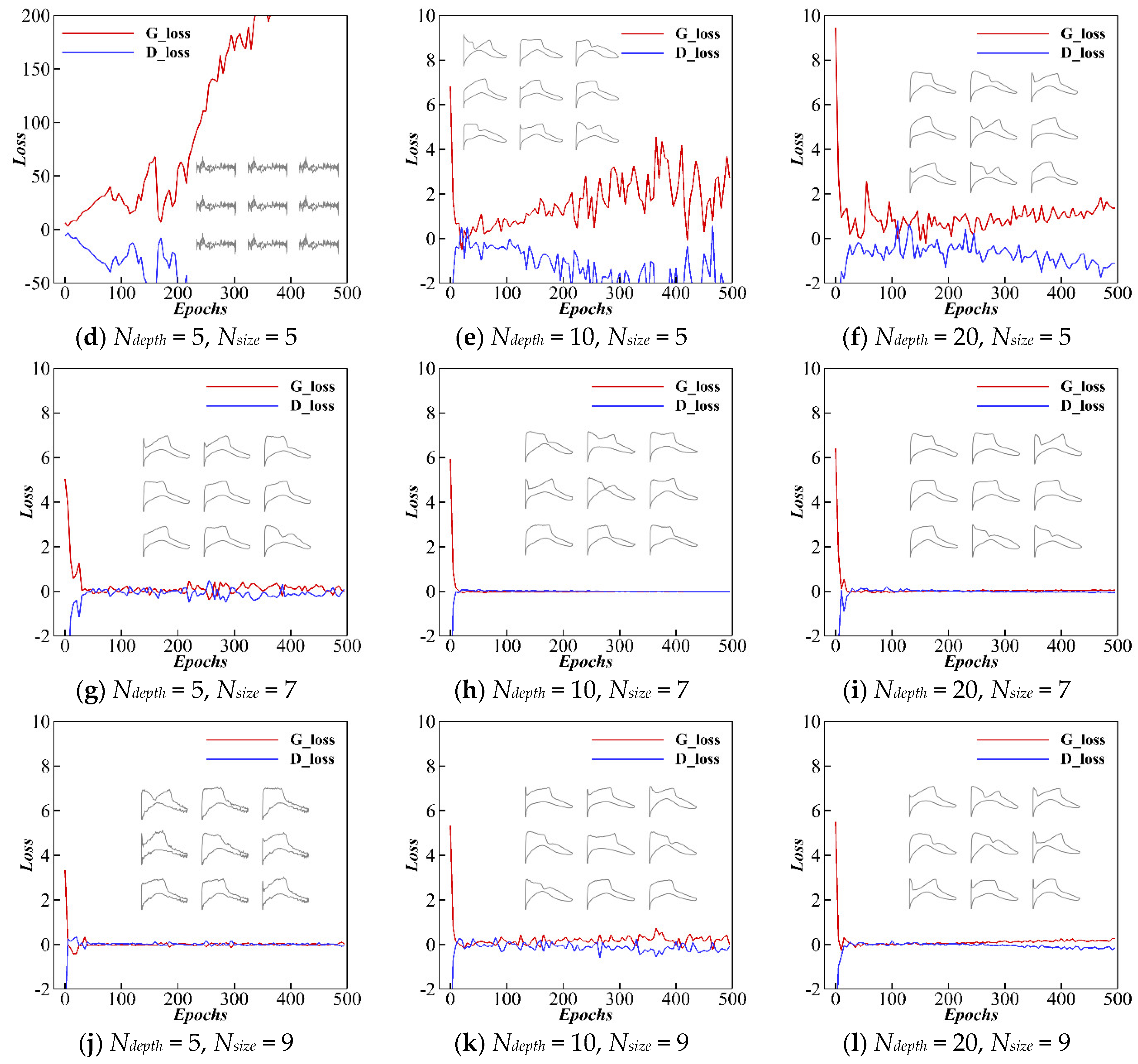
3.1. Parameter Selection of WGAN
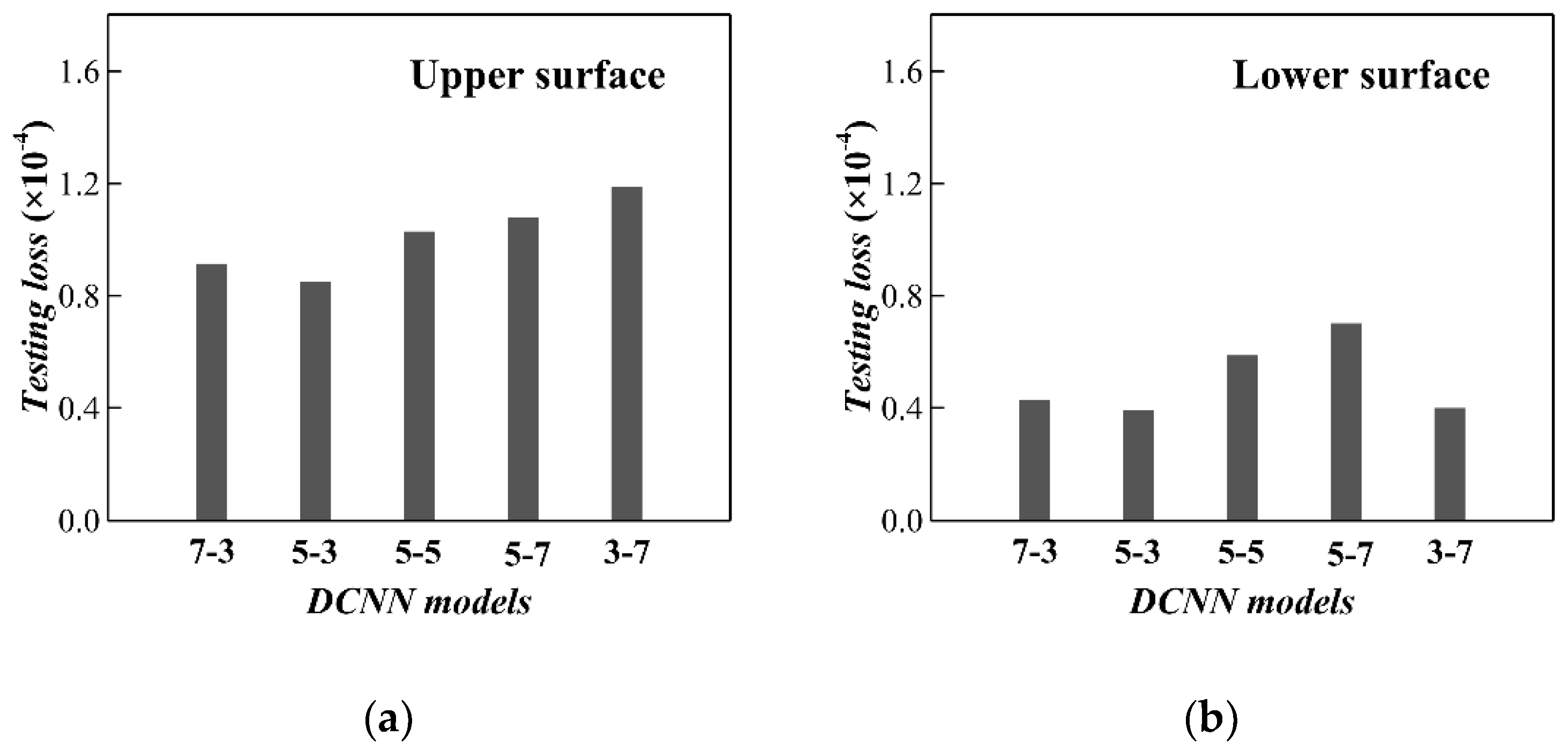
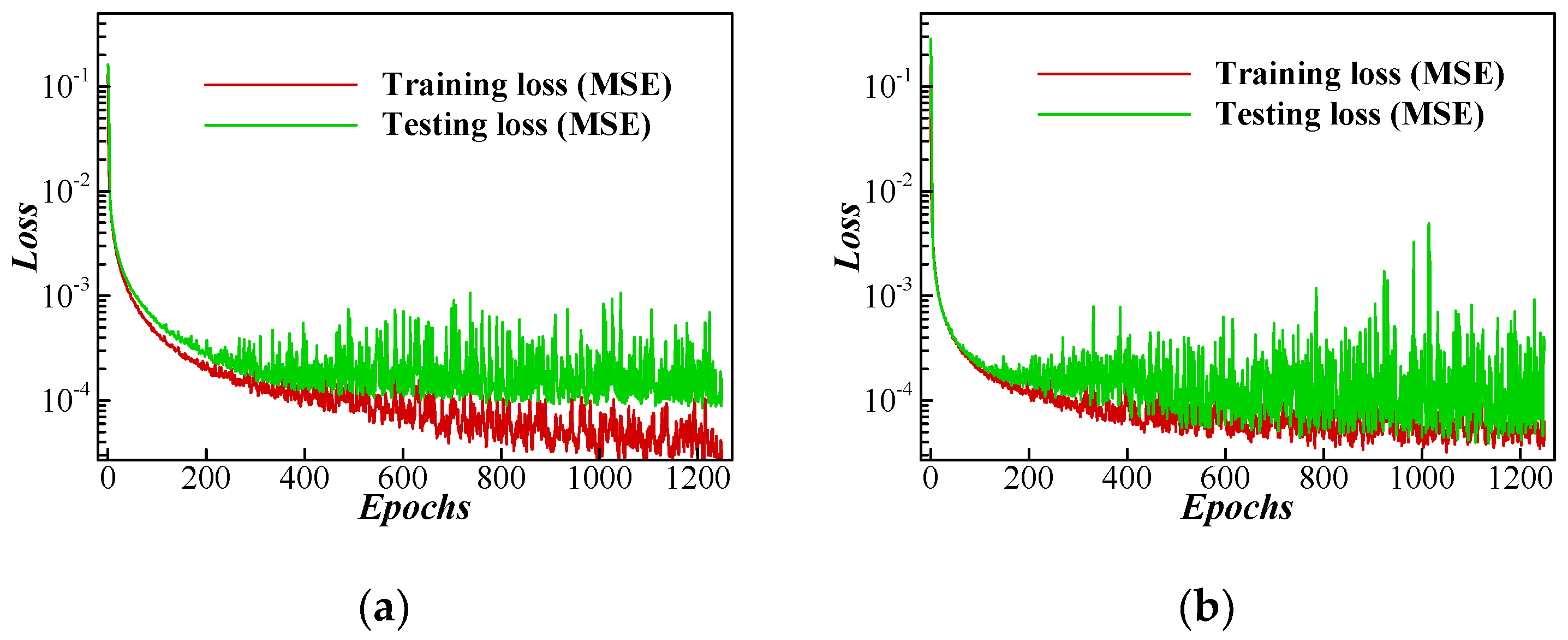
3.2. Parameter Selection of DCNN
4. Results and Discussions
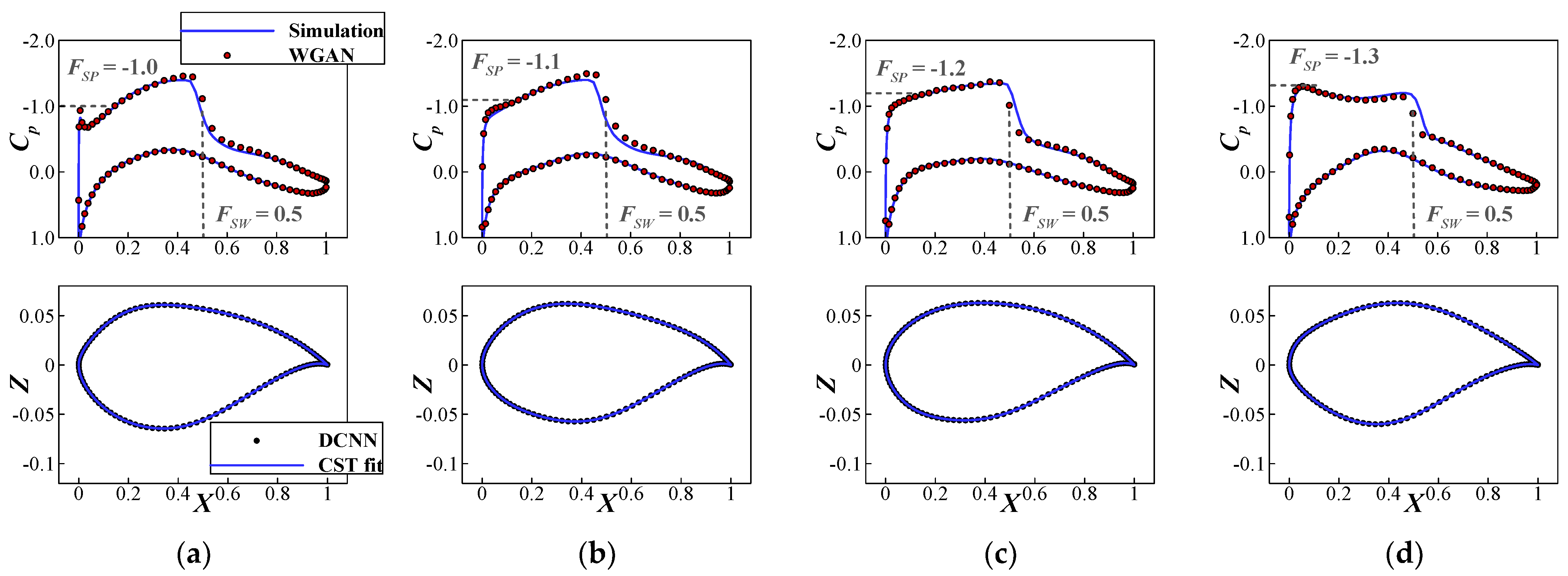
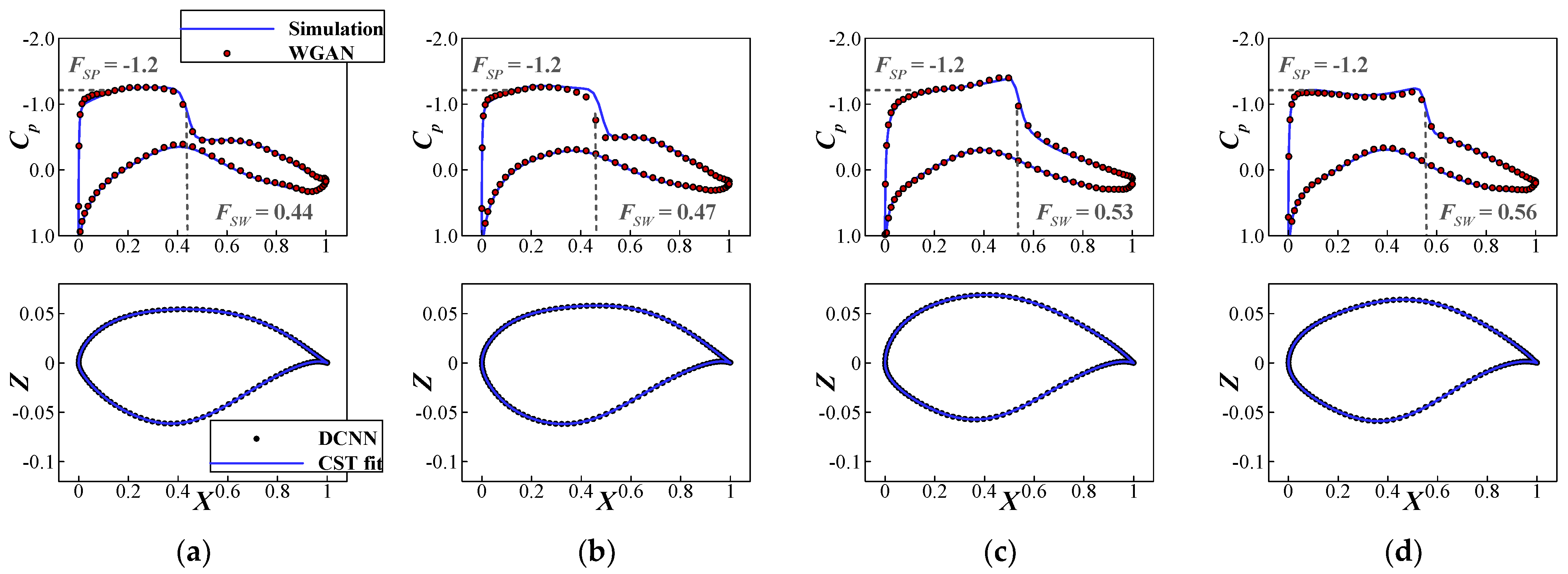
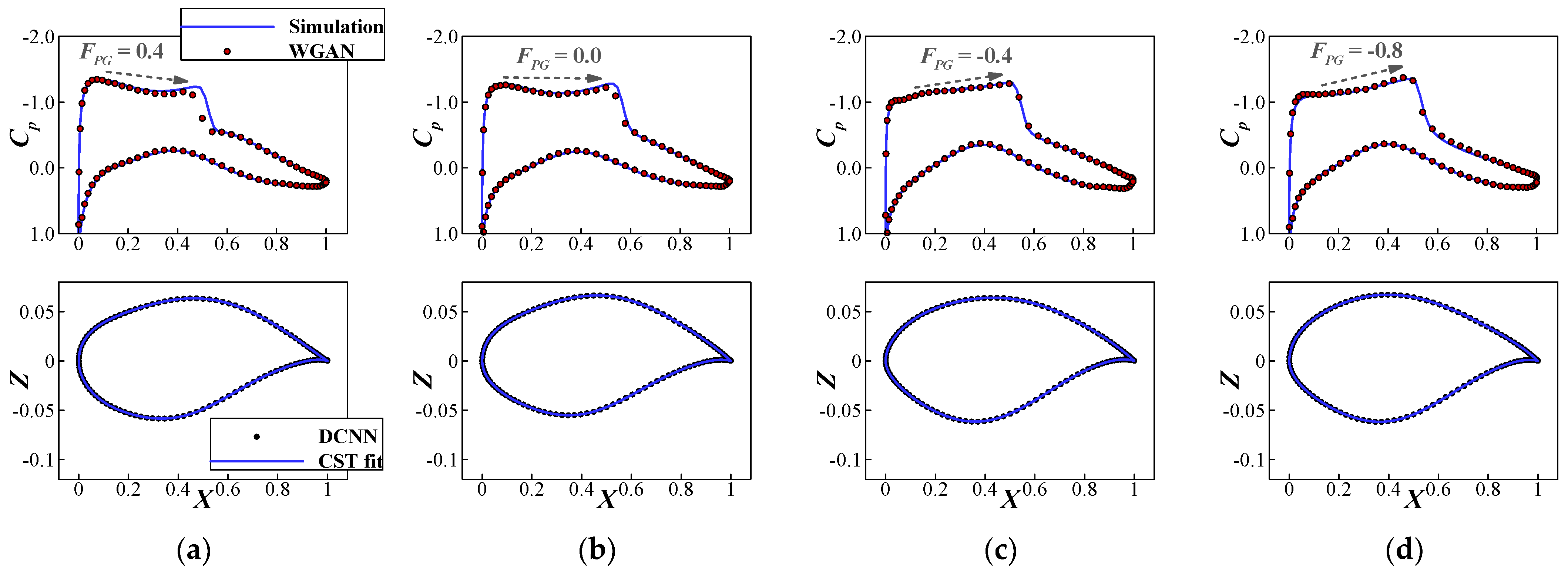
4.1. Design for Various Features
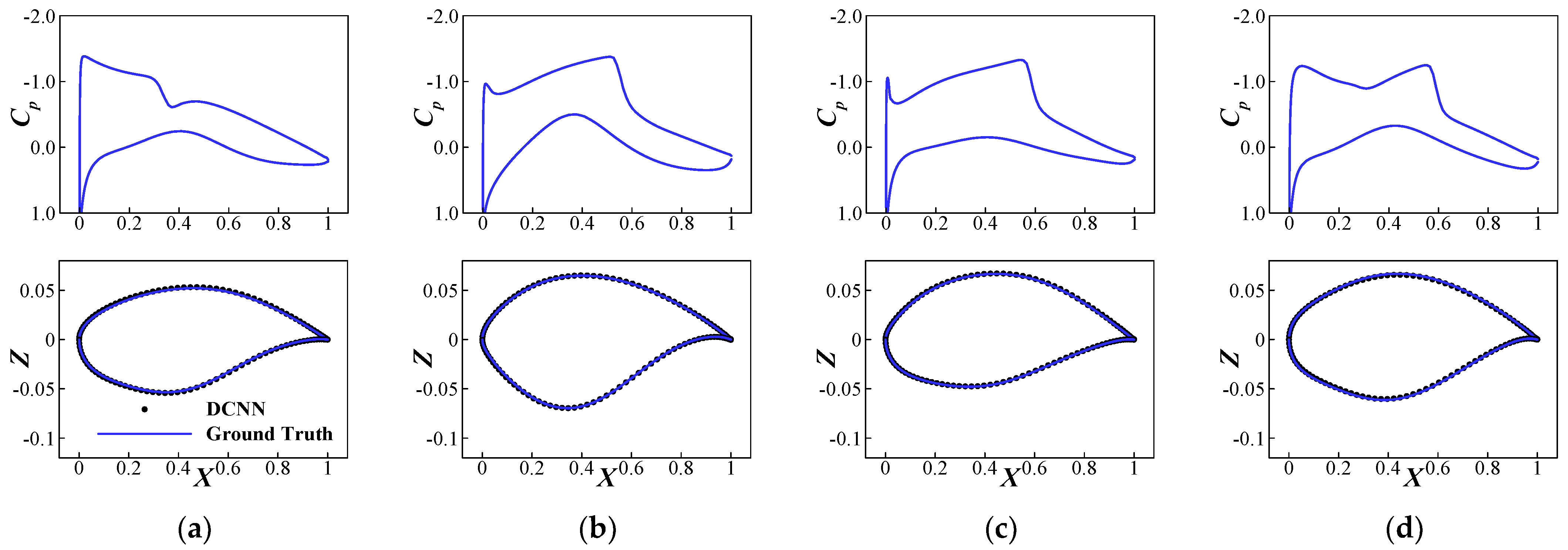
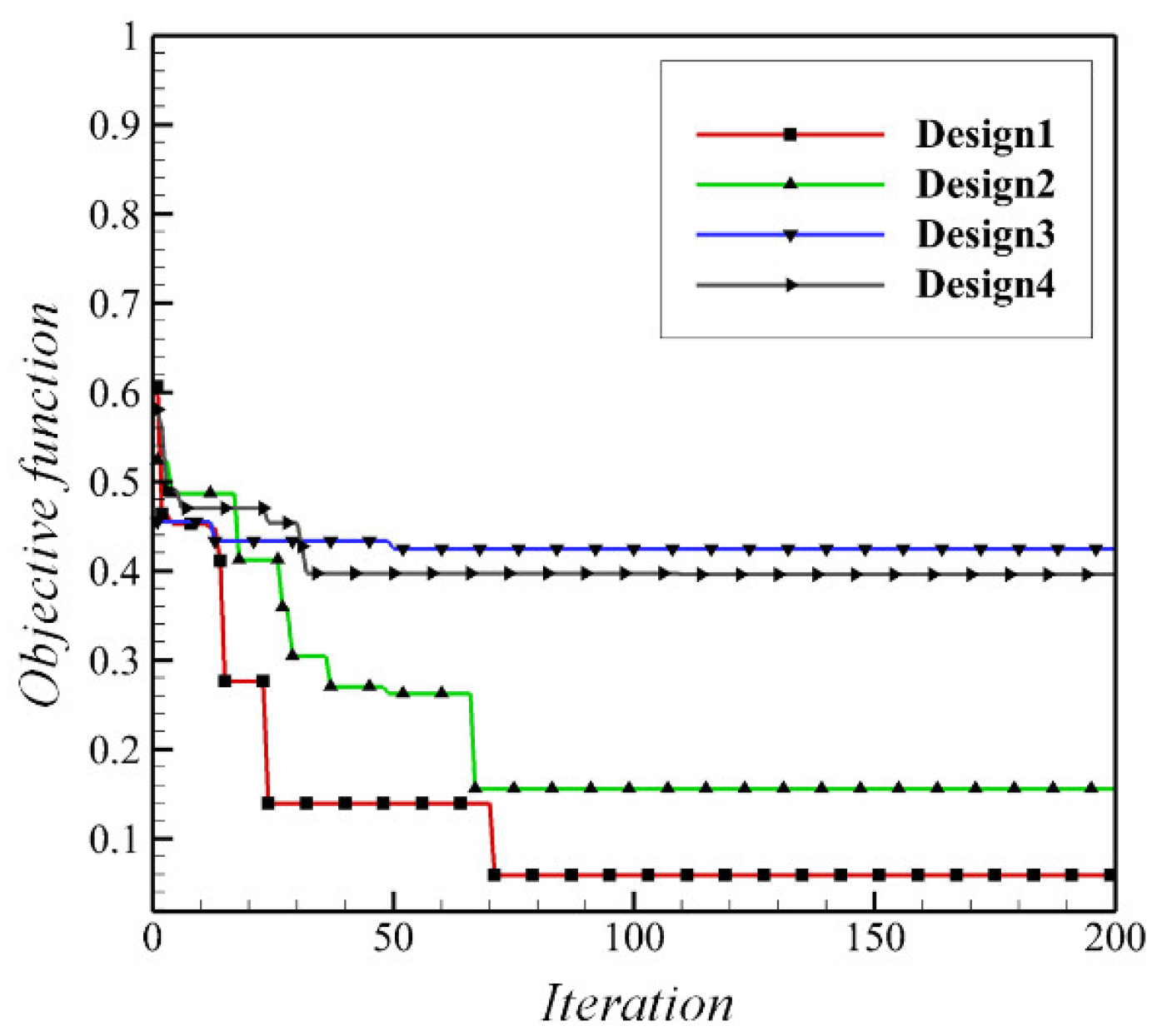
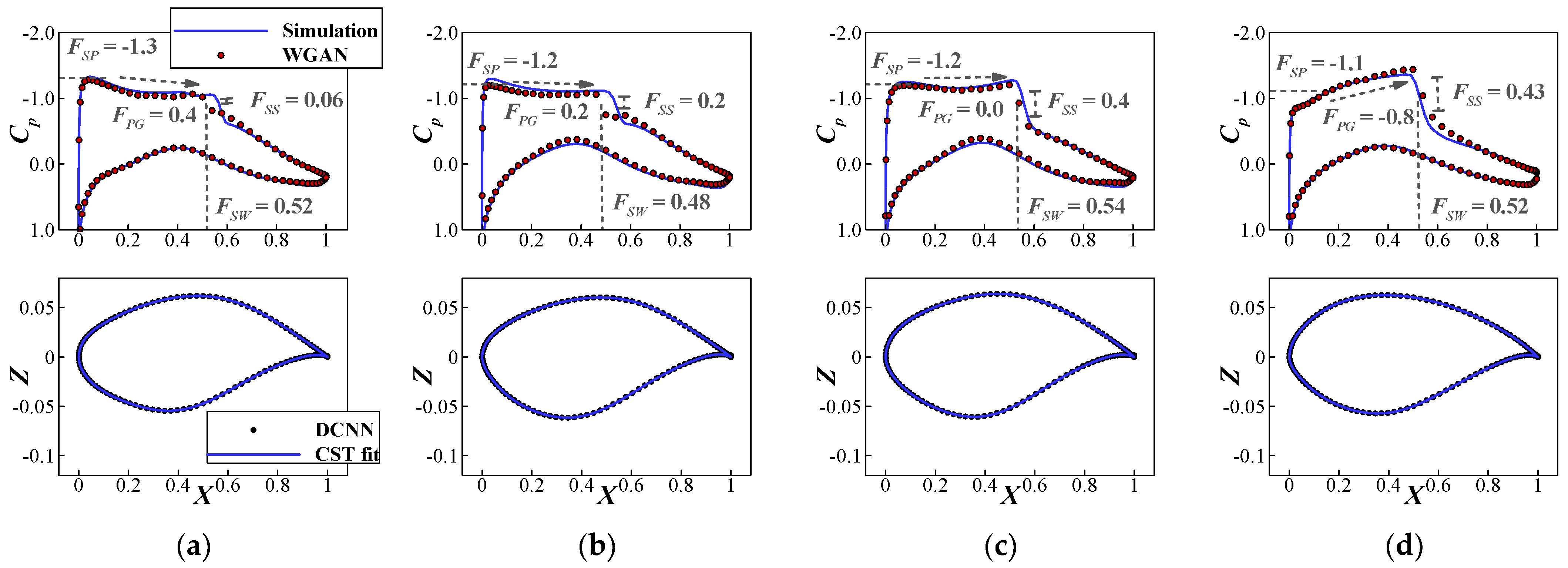
4.2. Design for Various Airfoils
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Pressure coefficient | |
| Airfoil chord length | |
| D | Discriminative model |
| Dimension of latent variable | |
| G | Generative model |
| Loss function | |
| Freestream Mach number | |
| Reynolds number based on the chord length | |
| Sample from dataset | |
| Latent variable of WGAN | |
| normalized coordinates | |
| Tuple for storing coordinates | |
| Angle of attack | |
| MSE | Mean square error |
| SDF | Signed distance function |
References
- BuiThanh, T.; Damodaran, M.; Willcox, K. Aerodynamic Data Reconstruction and Inverse Design Using Proper Orthogonal Decomposition. AIAA J. 2004, 42, 1505–1516. [Google Scholar] [CrossRef] [Green Version]
- Sekar, V.; Zhang, M.; Shu, C.; Khoo, B.C. Inverse Design of Airfoil Using a Deep Convolutional Neural Network. AIAA J. 2019, 57, 993–1003. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M.; Martins, J.; Shu, C. Efficient Aerodynamic Shape Optimization with Deep-Learning-Based Geometric Filtering. AIAA J. 2020, 58, 4243–4259. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M. On Deep-Learning-Based Geometric Filtering in Aerodynamic Shape Optimization. Aerosp. Sci. Technol. 2021, 112, 106603. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. In Proceedings of the Advances in Neural Information Processing Systems 27, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Chen, W.; Chiu, K.; Fuge, M. Aerodynamic Design Optimization and Shape Exploration Using Generative Adversarial Networks. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Chen, W.; Chiu, K.; Fuge, M.D. Airfoil Design Parameterization and Optimization Using Bézier Generative Adversarial Networks. AIAA J. 2020, 58, 4723–4735. [Google Scholar] [CrossRef]
- Du, X.; He, P.; Martins, J. A B-Spline-Based Generative Adversarial Network Model for Fast Interactive Airfoil Aerodynamic Optimization. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Du, X.; He, P.; Martins, J. Rapid Airfoil Design Optimization via Neural Network-Based Parameterization and Surrogate Modeling. Aerosp. Sci. Technol. 2021, 113, 106701. [Google Scholar] [CrossRef]
- Yilmaz, E.; German, B. Conditional Generative Adversarial Network Framework for Airfoil Inverse Design. In AIAA Paper 2020-3185, Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2020. [Google Scholar]
- Achour, G.; Sung, W.J.; Pinon-Fischer, O.J.; Mavris, D.N. Development of a Conditional Generative Adversarial Network for Airfoil Shape Optimization. In AIAA Paper 2020-2261, Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2020. [Google Scholar]
- Wu, H.; Liu, X.; An, W.; Chen, S.; Lyu, H. A Deep Learning Approach for Efficiently and Accurately Evaluating the Flow Field of Supercritical Airfoils. Comput. Fluids 2019, 198, 104393. [Google Scholar] [CrossRef]
- Wu, H.; Liu, X.; An, W.; Lyu, H. A Generative Deep Learning Framework for Airfoil Flow Field Prediction with Sparse Data. Chin. J. Aeronaut. 2021, 35, 470–484. [Google Scholar] [CrossRef]
- Wang, J.; Li, R.; He, C.; Chen, H.; Cheng, R.; Zhai, C.; Zhang, M. An Inverse Design Method for Supercritical Airfoil Based on Conditional Generative Models. Chin. J. Aeronaut. 2022, 35, 62–74. [Google Scholar] [CrossRef]
- Lei, R.; Bai, J.; Wang, H.; Zhou, B.; Zhang, M. Deep Learning Based Multistage Method for Inverse Design of Supercritical Airfoil. Aerosp. Sci. Technol. 2021, 119, 107101. [Google Scholar] [CrossRef]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein Generative Adversarial Networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, NSW, Australia, 6–11 August 2017; Volume 70, pp. 214–223. [Google Scholar]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Kuifan, B.M. Universal Parametric Geometry Representation Method. J. Aircr. 2008, 45, 142–158. [Google Scholar]
- Sclafani, A.J.; DeHaan, M.A.; Vassberg, J.C.; Rumsey, C.L.; Pulliam, T.H. Drag Prediction for the Common Research Model Using CFL3D and OVERFLOW. J. Aircr. 2014, 51, 1101–1117. [Google Scholar] [CrossRef]
- CFL3D. Available online: https://cfl3d.larc.nasa.gov/ (accessed on 19 November 2022).
- Cook, P.; Firmin, M.; Mcdonald, M. Aerofoil Rae2822: Pressure Distributions and Boundary Layer and Wake Measurements; AGARD AR 138; Royal Aircraft Establishment: Farnborough, UK, 1979.
- Run, Z.; Kai, W.; Yu, F.; Hai, X. Pressure Distibution Guided Supercritical Wing Optimization. Chin. J. Aeronaut. 2018, 31, 1842–1854. [Google Scholar]
- Guo, X.; Li, W.; Iorio, F. Convolutional Neural Networks for Steady Flow Approximation. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 481–490. [Google Scholar]
- PyTorch. Available online: https://github.com/Pytorch/Pytorch (accessed on 19 November 2022).
- Sobieczky, H. Parametric Airfoils and Wings. In Recent Development of Aerodynamic Design Methodologies. Notes on Numerical Fluid Mechanics (NNFM); Fujii, K., Dulikravich, G.S., Eds.; Vieweg + Teubner Verlag: Wiesbaden, Germany, 1999; pp. 71–87. ISBN 978-3-322-89954-5. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model G | Model D | ||||
|---|---|---|---|---|---|
| Layer | Filter depth | AF | Layer | Filter depth | AF |
| FC layer | 512 | ReLU | C layer 1 | Ndepth | LeakyReLU(0.2) |
| TC layer 1 | 4 × Ndepth | ReLU | C layer 2 | 2 × Ndepth | LeakyReLU(0.2) |
| TC layer 2 | 2 × Ndepth | ReLU | C layer 3 | 4 × Ndepth | LeakyReLU(0.2) |
| TC layer 3 | Ndepth | ReLU | C layer 4 | 8 × Ndepth | LeakyReLU(0.2) |
| TC layer 4 | 1 | FC layer | 1 | ||
| 1 | 5 | 10 | 100 | |
|---|---|---|---|---|
| MMD | 0.067 | 0.047 | 0.045 | 0.045 |
| Network | CNN7-3 | CNN5-3 | CNN5-5 | CNN5-7 | CNN3-7 |
|---|---|---|---|---|---|
| Kernel size | 7 × 7 | 5 × 5 | 5 × 5 | 5 × 5 | 3 × 3 |
| C Layer 1 depth | 20 | 20 | 20 | 20 | 20 |
| C Layer 2 depth | 40 | 40 | 40 | 40 | 40 |
| C Layer 3 depth | 60 | 60 | 60 | 60 | 60 |
| C Layer 4 depth | - | - | 80 | 80 | 80 |
| C Layer 5 depth | - | - | 100 | 100 | 100 |
| C Layer 6 depth | - | - | - | 120 | 120 |
| C Layer 7 depth | - | - | - | 140 | 140 |
| FC Layer neurons | 61 | 61 | 61 | 61 | 61 |
| Function | Quantity | Description | |
|---|---|---|---|
| Minimize | FSS | 1 | Shock-wave strength |
| Design variables | 10 | Latent variables to model G | |
| Constraints | FSP > c1, FPG < c2, 0.45 < FSW < 0.55 | 1 1 1 | Suction peak Pressure gradient Shock-wave position |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, F.; Yi, J. Fast Inverse Design of Transonic Airfoils by Combining Deep Learning and Efficient Global Optimization. Aerospace 2023, 10, 125. https://doi.org/10.3390/aerospace10020125
Deng F, Yi J. Fast Inverse Design of Transonic Airfoils by Combining Deep Learning and Efficient Global Optimization. Aerospace. 2023; 10(2):125. https://doi.org/10.3390/aerospace10020125
Chicago/Turabian StyleDeng, Feng, and Jianmiao Yi. 2023. "Fast Inverse Design of Transonic Airfoils by Combining Deep Learning and Efficient Global Optimization" Aerospace 10, no. 2: 125. https://doi.org/10.3390/aerospace10020125
APA StyleDeng, F., & Yi, J. (2023). Fast Inverse Design of Transonic Airfoils by Combining Deep Learning and Efficient Global Optimization. Aerospace, 10(2), 125. https://doi.org/10.3390/aerospace10020125