
UAV Platforms for Data Acquisition and Intervention Practices in Forestry: Towards More Intelligent Applications




Abstract
:1. Introduction
- We consolidate the state-of-the-art unmanned systems in the forestry field with a major focus on UAV systems and heterogeneous platforms.
- Methodology and application under multiple forestry environments are reviewed, including wood production, tree quantification, disease control, wildfire management, and wildlife conservation.
- The challenges of UAV systems deployment are analyzed from environmental characterization, maneuverability, and mobility improvement, and global regulatory interpretation.
- The future directions are analyzed in terms of mobility enhancement and customized sensory adaptation, which need to be further developed for synchronizing all possible agents into automatic functioning systems for forestry exploration.
2. Forestry Unmanned Platform
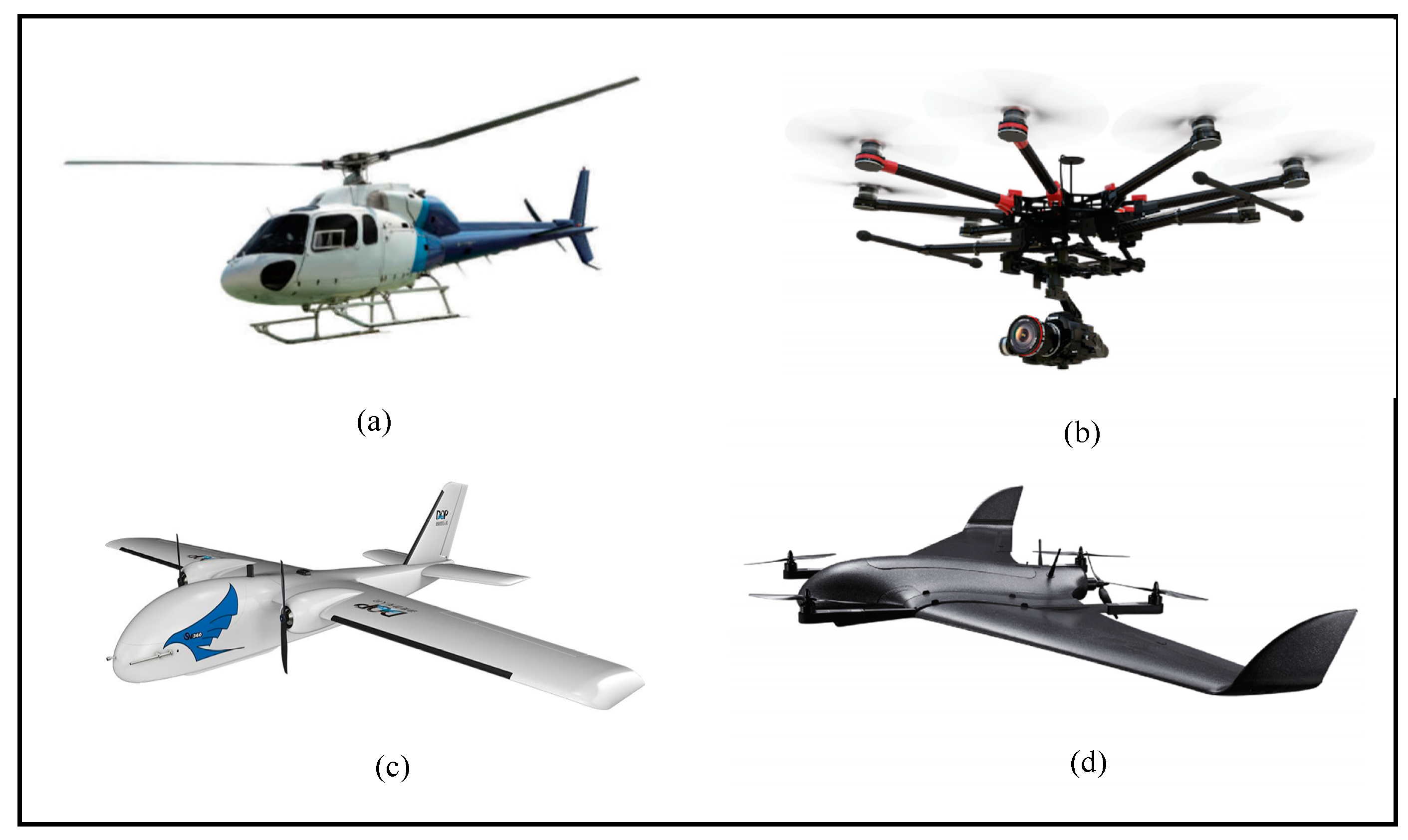
2.1. Unmanned Aerial Vehicles
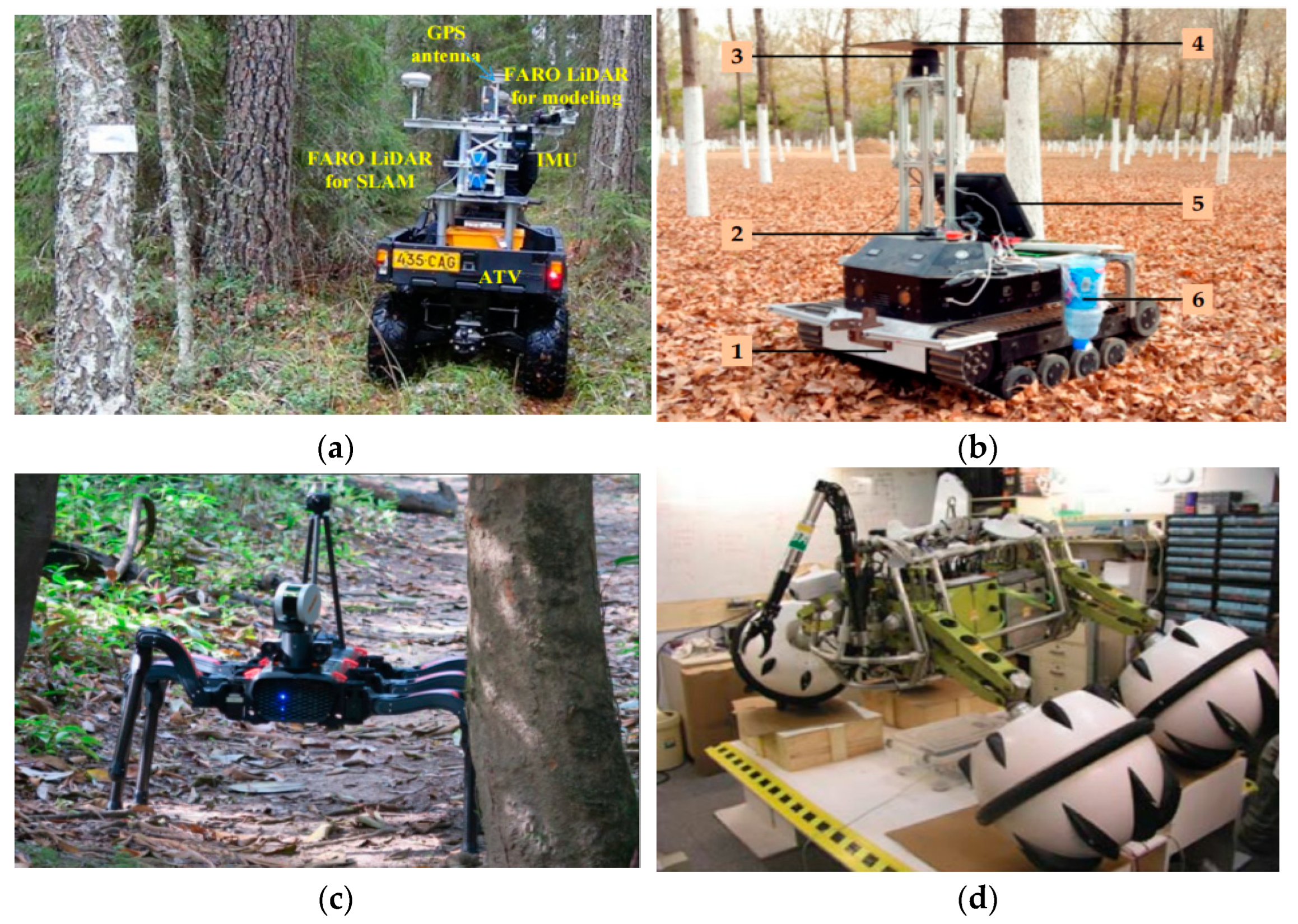
2.2. Unmanned Ground Vehicles
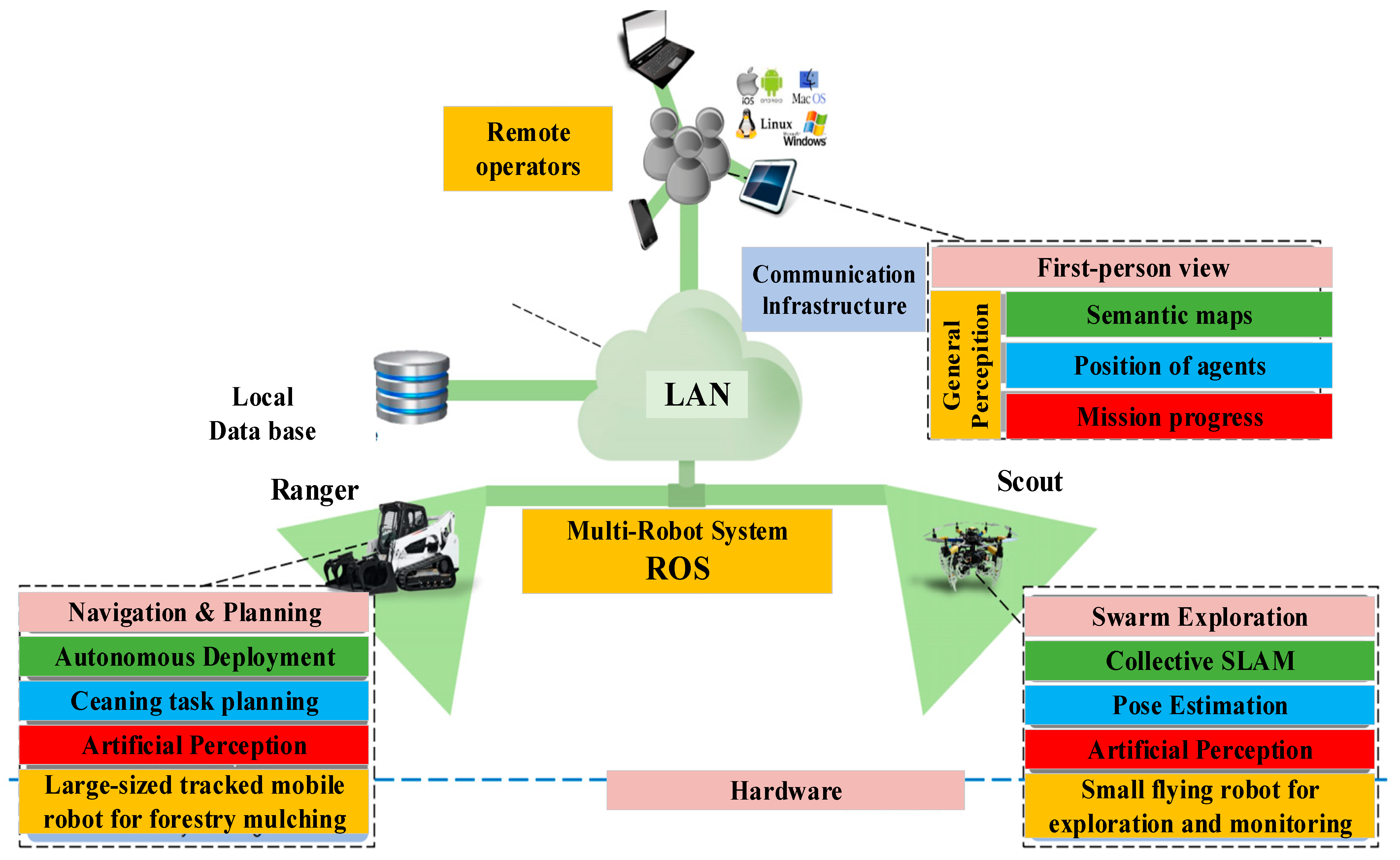
2.3. Collaboration of Multi-Hybrid Robot Platforms
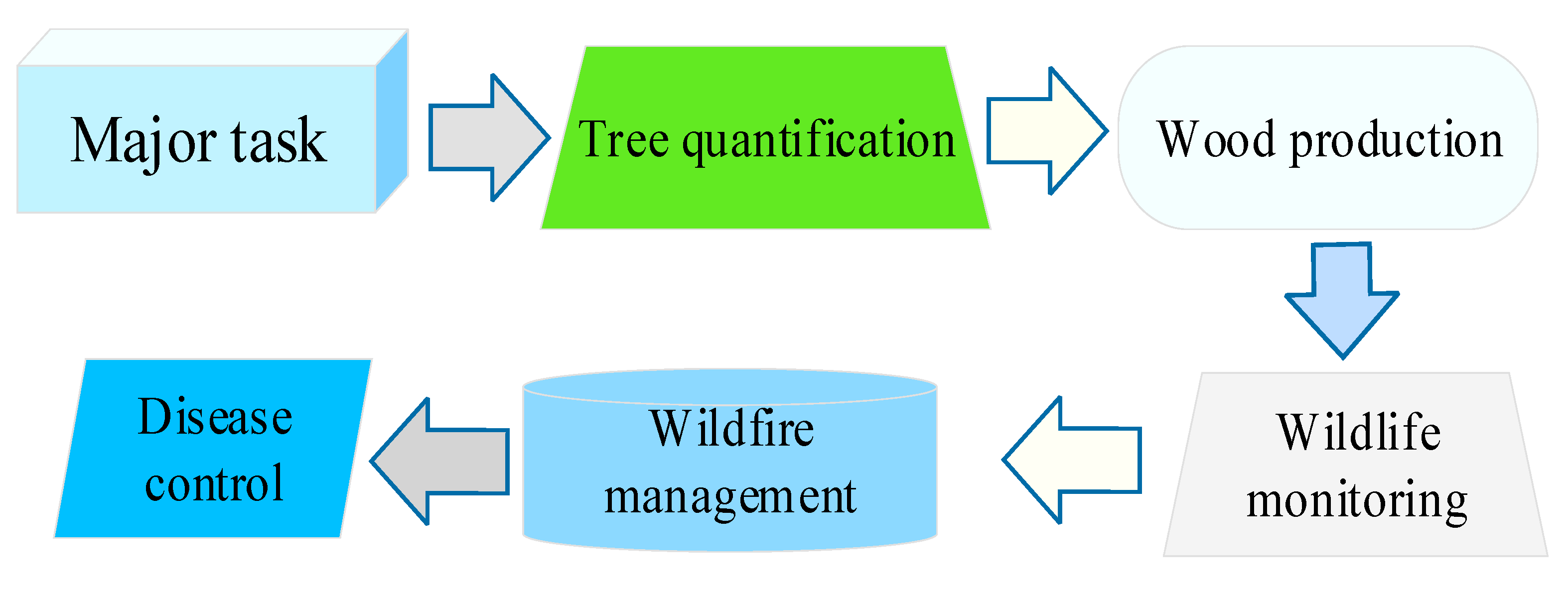
3. Forestry Applications
3.1. Wood Production
3.2. Tree Quantification
3.3. Disease Control
3.4. Wildfire Management
3.5. Wildlife Conservation
4. Discussion
4.1. Current Status
4.2. Challenges in Forestry
- (1)
- Environmental uncertainty
- (2)
- Maneuverability and utilization of UAVs
- (3)
- Supervision and regulations
4.3. Future Recommendations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hamedianfar, A.; Mohamedou, C.; Kangas, A.; Vauhkonen, J. Deep learning for forest inventory and planning: A critical review on the remote sensing approaches so far and prospects for further applications. Forestry 2022, 95, 451–465. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Idrissi, M.; Hussain, A.; Barua, B.; Osman, A.; Abozariba, R.; Aneiba, A.; Asyhari, T. Evaluating the Forest Ecosystem through a Semi-Autonomous Quadruped Robot and a Hexacopter UAV. Sensors 2022, 22, 5497. [Google Scholar] [CrossRef] [PubMed]
- Ishii, K.; Hayashi, E.; Bin Misron, N.; Thornton, B. Special Issue on Advanced Robotics in Agriculture, Forestry and Fisheries. J. Robot. Mechatron. 2018, 30, 163–164. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Zhu, Y.; Kan, J. Prediction of the lateral stability of a forestry chassis with an articulated body and fitted with luffing wheel-legs. Biosyst. Eng. 2022, 224, 143–160. [Google Scholar] [CrossRef]
- Reid, D.A.; Hassan, M.A. Response of In-Stream Wood to Riparian Timber Harvesting: Field Observations and Long-Term Projections. Water Resour. Res. 2020, 56, e2020WR027077. [Google Scholar] [CrossRef]
- Visser, R.; Obi, O.F. Automation and Robotics in Forest Harvesting Operations: Identifying Near-Term Opportunities. Croat. J. For. Eng. 2021, 42, 13–24. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Yu, X. Fault-Tolerant Time-Varying Elliptical Formation Control of Multiple Fixed-Wing UAVs for Cooperative Forest Fire Monitoring. J. Intell. Robot. Syst. 2021, 101, 48. [Google Scholar] [CrossRef]
- Tranchitella, M.; Fujikawa, S.; Ng, T.L.; Yoel, D.; Tatum, D.; Roy, P.; Mazel, C.; Herwitz, S.; Hinkley, E. Using Tactical Unmanned Aerial Systems to Monitor and Map Wildfires. AIAA J. 2013, 5, 381–388. [Google Scholar]
- Zhang, Y.; Zhang, Y.; Yu, Z. A Solution for Searching and Monitoring Forest Fires Based on Multiple UAVs. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 661–666. [Google Scholar]
- Sudhakar, S.; Vijayakumar, V.; Kumar, C.S.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned Aerial Vehicle (UAV) based Forest Fire Detection and monitoring for reducing false alarms in forest-fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Inoue, T.; Nagai, S.; Yamashita, S.; Fadaei, H.; Ishii, R.; Okabe, K.; Taki, H.; Honda, Y.; Kajiwara, K.; Suzuki, R. Unmanned aerial survey of fallen trees in a deciduous broadleaved forest in eastern Japan. PLoS ONE 2014, 9, e109881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guoshuai, Z. Application and Demand Analysis of Unamnned Aerial Vehicle Remote Sensing in Forestry. J. Fujian For. Sci. Technol. 2017, 44, 136–140. [Google Scholar]
- Hassaan, O.; Nasir, A.K.; Roth, H.; Khan, M.F. Precision Forestry: Trees Counting in Urban Areas Using Visible Imagery based on an Unmanned Aerial Vehicle. IFAC Pap. Online 2016, 49, 16–21. [Google Scholar] [CrossRef]
- Christensen, B.R. Use of UAV or remotely piloted aircraft and forward-looking infrared in forest, rural and wildland fire management: Evaluation using simple economic analysis. N. Z. J. For. Sci. 2015, 45, 16. [Google Scholar] [CrossRef] [Green Version]
- Tan, L.T.; Tan, K.H. Alternative air vehicles for sterile insect technique aerial release. J. Appl. Entomol. 2013, 137, 126–141. [Google Scholar] [CrossRef]
- Schweier, J.; Spinelli, R.; Magagnotti, N.; Becker, G. Mechanized coppice harvesting with new small-scale feller-bunchers: Results from harvesting trials with newly manufactured felling heads in Italy. Biomass Bioenergy 2015, 72, 85–94. [Google Scholar] [CrossRef]
- McEachran, Z.P.; Karwan, D.L.; Slesak, R.A. Direct and Indirect Effects of Forest Harvesting on Sediment Yield in Forested Watersheds of the United States. JAWRA J. Am. Water Resour. Assoc. 2020, 57, 1–31. [Google Scholar] [CrossRef]
- Duarte, A.; Borralho, N.; Cabral, P.; Caetano, M. Recent Advances in Forest Insect Pests and Diseases Monitoring Using UAV-Based Data: A Systematic Review. Forests 2022, 13, 911. [Google Scholar] [CrossRef]
- Urbina-Brito, N.; Guerrero-Sánchez, M.E.; Valencia-Palomo, G.; Hernández-González, O.; López-Estrada, F.R.; Hoyo-Montaño, J.A. A Predictive Control Strategy for Aerial Payload Transportation with an Unmanned Aerial Vehicle. Mathematics 2021, 9, 1822. [Google Scholar] [CrossRef]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [Green Version]
- Jiao, Z.; Zhang, Y.; Mu, L.; Xin, J.; Jiao, S.; Liu, H.; Liu, D. A YOLOv3-based Learning Strategy for Real-time UAV-based Forest Fire Detection. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4963–4967. [Google Scholar]
- Ju, C.; Son, H.I. Modeling and Control of Heterogeneous Agricultural Field Robots Based on Ramadge–Wonham Theory. IEEE Robot. Autom. Lett. 2020, 5, 48–55. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.-J.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring: A Systematic Review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Aydin, B.; Selvi, E.; Tao, J.; Starek, M.J. Use of fire-extinguishing balls for a conceptual system of drone-assisted wildfire fighting. Drones 2019, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Akhloufi, M.A.; Couturier, A.; Castro, N.A. Unmanned aerial vehicles for wildland fires: Sensing, perception, cooperation and assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Ivanova, S.; Prosekov, A.; Kaledin, A. A Survey on Monitoring of Wild Animals during Fires Using Drones. Fire 2022, 5, 60. [Google Scholar] [CrossRef]
- Kumar, M.; Cohen, K.; Hom Chaudhuri, B. Cooperative control of multiple uninhabited aerial vehicles for monitoring and fighting wildfires. J. Aerosp. Comput. Inf. Commun. 2011, 8, 1–16. [Google Scholar] [CrossRef]
- Rocha, A.M.; Casau, P.; Cunha, R. A Control Algorithm for Early Wildfire Detection Using Aerial Sensor Networks: Modeling and Simulation. Drones 2022, 6, 44. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Hernández-González, O.; Valencia-Palomo, G.; López-Estrada, F.R.; Rodríguez-Mata, A.E.; Garrido, J. Filtered observer-based ida-pbc control for trajectory tracking of a quadrotor. IEEE Access 2021, 9, 114821–114835. [Google Scholar] [CrossRef]
- Lee, K.W.; Park, J.K. Economic evaluation of unmanned aerial vehicle for forest pest monitoring. J. Korea Acad. Ind. Coop. Soc. 2019, 20, 440–446. [Google Scholar]
- Poley, L.G.; McDermid, G.J. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052. [Google Scholar] [CrossRef] [Green Version]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Eugenio, F.C.; Schons, C.T.; Mallmann, C.L.; Schuh, M.S.; Fernandes, P.; Badin, T.L. Remotely piloted aircraft systems and forests: A global state of the art and future challenges. Can. J. For. Res. 2020, 50, 705–716. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Gambella, F.; Sistu, L.; Piccirilli, D.; Corposanto, S.; Caria, M.; Arcangeletti, E.; Proto, A.R.; Chessa, G.; Pazzona, A. Forest and UAV: A bibliometric review. Contemp. Eng. Sci. 2016, 9, 1359–1370. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, H.; Hu, C.; Li, T.; Yu, M. Application and future development of unmanned aerial vehicle in forestry. J. For. Eng. 2019, 4, 8–16. [Google Scholar]
- Yildiz, K.; Eken, S.; Kaya, M.O. Optimal Control Procedure Application for Dynamic Response of Adaptive Aircraft Wings Modeled as Thin-Walled Composite Beams. Appl. Mech. Mater. 2015, 798, 292–296. [Google Scholar]
- Bella, S.; Belbachir, A.; Belalem, G. A hybrid air-sea cooperative approach combined with a swarm trajectory planning method. Paladyn J. Behav. Robot. 2020, 11, 118–139. [Google Scholar] [CrossRef]
- Muskardin, T.; Coelho, A.; Della Noce, E.R.; Ollero, A.; Kondak, K. Energy-Based Cooperative Control for Landing Fixed-Wing UAVs on Mobile Platforms Under Communication Delays. IEEE Robot. Autom. Lett. 2020, 5, 5081–5088. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Zinovieva, I.S.; Artemchuk, V.O.; Iatsyshyn, A.V.; Popov, O.O.; Kovach, V.O.; Iatsyshyn, A.V.; Romanenko, Y.O.; Radchenko, O.V. The use of online coding platforms as additional distance tools in programming education. J. Phys. Conf. Ser. 2021, 1840, 012029. [Google Scholar] [CrossRef]
- Banu, T.P.; Borlea, G.F.; Banu, C. The Use of Drones in Forestry. J. Environ. Sci. Eng. 2016, 5, 557–562. [Google Scholar]
- Mesas-Carrascosa, F.J.; Notario-García, M.D.; de Larriva, J.E.M.; de la Orden, M.S.; Porras, A.G.F. Validation of measurements of land plot area using UAV imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 270–279. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Hassanalian, M.; Khaki, H.; Khosravi, M. A new method for design of fixed wing micro air vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 837–850. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Goodbody, T.R.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J.C. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Stone, C.; Mohammed, C. Application of remote sensing technologies for assessing planted forests damaged by insect pests and fungal pathogens: A review. Curr. For. Rep. 2017, 3, 75–92. [Google Scholar] [CrossRef]
- Launchbury, R. Unmanned Aerial Vehicles in Forestry. For. Chron. 2014, 90, 418–420. [Google Scholar] [CrossRef]
- Gupta, S.G.; Ghonge, D.; Jawandhiya, P.M. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. IJARCET 2013, 2, 1646–1658. [Google Scholar] [CrossRef]
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Imdoukh, A.; Shaker, A.; Al-Toukhy, A.; Kablaoui, D.; El-Abd, M. Semi-autonomous indoor firefighting UAV. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 310–315. [Google Scholar]
- Walter, V.; Spurný, V.; Petrlík, M.; Báča, T.; Žaitlík, D.; Saska, M. Extinguishing of ground fires by fully autonomous UAVs motivated by the MBZIRC 2020 competition. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 787–793. [Google Scholar]
- Ge, C.; Ma, X.; Liu, Z. A semi-autonomous distributed blockchain-based framework for UAVs system. J. Syst. Archit. 2020, 107, 101728. [Google Scholar] [CrossRef]
- Steenbeek, A.; Nex, F. CNN-based dense monocular visual SLAM for real-time UAV exploration in emergency conditions. Drones 2022, 6, 79. [Google Scholar] [CrossRef]
- Dong, J.; Ren, X.; Han, S.; Luo, S. UAV vision aided INS/odometer integration for land vehicle autonomous navigation. IEEE Trans. Veh. Technol. 2022, 71, 4825–4840. [Google Scholar] [CrossRef]
- Berenguer, Y.; Payá, L.; Valiente, D.; Peidró, A.; Reinoso, O. Relative altitude estimation using omnidirectional imaging and holistic descriptors. Remote Sens. 2019, 11, 323. [Google Scholar] [CrossRef] [Green Version]
- Moses, P.L.; Rausch, V.L.; Nguyen, L.T.; Hill, J.R. NASA hypersonic flight demonstrators—Overview, status, and future plans. Acta Astronaut. 2004, 55, 619–630. [Google Scholar] [CrossRef]
- Zhang, T.; Lu, W.; Li, Y. Intelligent unmanned aerial vehicle review. Aviat. Manuf. Technol. 2013, 12, 32–35. [Google Scholar]
- Lideskog, H.; Karlberg, M.; Bergsten, U. Development of a Research Vehicle Platform to Improve Productivity and Value-extraction in Forestry. Procedia CIRP 2015, 38, 68–73. [Google Scholar] [CrossRef] [Green Version]
- Tavares, T.D.O.; de Oliveira, B.R.; Silva, V.D.A.; Pereira da Silva, R.; Dos Santos, A.F.; Okida, E.S. The times, movements and operational efficiency of mechanized coffee harvesting in sloped areas. PLoS ONE 2019, 14, e0217286. [Google Scholar] [CrossRef]
- Nasiruddin Khilji, T.; Lopes Amaral Loures, L.; Rezazadeh Azar, E. Distress Recognition in Unpaved Roads Using Unmanned Aerial Systems and Deep Learning Segmentation. J. Comput. Civ. Eng. 2021, 35, 04020061. [Google Scholar] [CrossRef]
- Gázquez, J.A.; Castellano, N.N.; Manzano-Agugliaro, F. Intelligent low cost telecontrol system for agricultural vehicles in harmful environments. J. Clean. Prod. 2016, 113, 204–215. [Google Scholar] [CrossRef]
- Koszewnik, A.; Oldziej, D. Performance assessment of an energy harvesting system located on a copter. Eur. Phys. J. Spec. Top. 2019, 228, 1677–1692. [Google Scholar] [CrossRef] [Green Version]
- Gerasimov, Y.; Sokolov, A. Ergonomic evaluation and comparison of wood harvesting systems in Northwest Russia. Appl. Ergon. 2014, 45, 318–338. [Google Scholar] [CrossRef]
- Vandapel, N.; Donamukkala, R.R.; Hebert, M. Unmanned Ground Vehicle Navigation Using Aerial Ladar Data. Int. J. Robot. Res. 2006, 25, 31–51. [Google Scholar] [CrossRef] [Green Version]
- Saputra, H.M.; Mirdanies, M. Controlling Unmanned Ground Vehicle Via 4 Channel Remote Control. Energy Procedia 2015, 68, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Yong, L.; Chen, Y.; Zhang, S.; Ge, L.; Wang, S.; Li, W. A rubber-tapping robot forest navigation and information collection system based on 2D LiDAR and a gyroscope. Sensors 2019, 19, 2136. [Google Scholar] [CrossRef] [Green Version]
- CSIRO. Amazon 360: Testing Self-Navigation in a Novel Landscape. 2020. Available online: https://algorithm.data61.csiro.au/amazon-360-testing-self-navigation-in-a-novel-landscape/ (accessed on 21 August 2018).
- Freitas, G.; Gleizer, G.; Lizarralde, F.; Hsu, L.; dos Reis, N.R.S. Kinematic reconfigurability control for an environmental mobile robot operating in the amazon rain forest. J. Field Robot. 2010, 27, 197–216. [Google Scholar] [CrossRef]
- Sun, T.; Xiang, X.; Su, W.; Wu, H.; Song, Y. A transformable wheel-legged mobile robot: Design, analysis and experiment. Robot. Auton. Syst. 2017, 98, 30–41. [Google Scholar] [CrossRef]
- Ismoilov, A.; Sellgren, U.; Andersson, K.; Löfgren, B. A comparison of novel chassis suspended machines for sustainable forestry. J. Terramechanics 2015, 58, 59–68. [Google Scholar] [CrossRef]
- Bruzzone, L.; Quaglia, G. Review article: Locomotion systems for ground mobile robots in unstructured environments. Mech. Sci. 2012, 3, 49–62. [Google Scholar] [CrossRef] [Green Version]
- Pijuan, J.; Comellas, M.; Nogués, M.; Roca, J.; Potau, X. Active bogies and chassis levelling for a vehicle operating in rough terrain. J. Terramechanics 2012, 49, 161–171. [Google Scholar] [CrossRef]
- Grocholsky, B.; Keller, J.; Kumar, V.; Pappas, G. Cooperative air and ground surveillance. Robot. Autom. Mag. IEEE 2006, 13, 16–25. [Google Scholar] [CrossRef] [Green Version]
- Quintin, F.; Iovino, S.; Savvaris, A.; Tsourdos, A. Use of Co-operative UAVs to Support/Augment UGV Situational Awareness and/or Inter-Vehicle Communications. IFAC Pap. Online 2017, 50, 8037–8044. [Google Scholar] [CrossRef]
- Sakai, S.; Iida, M.; Osuka, K.; Umeda, M. Design and control of a heavy material handling manipulator for agricultural robots. Auton. Robot. 2008, 25, 189–204. [Google Scholar] [CrossRef] [Green Version]
- Stentz, A.; Kelly, A.; Rander, P.; Herman, H.; Amidi, O.; Mandelbaum, R.; Salgian, G.; Pedersen, J. Real-Time, Multi-Perspective Perception for Unmanned Cround Vehicles. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2003. [Google Scholar]
- Tanveer, M.H.; Zhu, H.; Ahmed, W.; Thomas, A.; Imran, B.M.; Salman, M. Mel-spectrogram and deep cnn based representation learning from bio-sonar implementation on UAVs. In Proceedings of the 2021 International Conference on Computer, Control and Robotics (ICCCR), Shanghai, China, 8–10 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 220–224. [Google Scholar]
- Käslin, R.; Fankhauser, P.; Stumm, E.; Taylor, Z.; Mueggler, E.; Delmerico, J.; Scaramuzza, D.; Siegwart, R.; Hutter, M. Collaborative localization of aerial and ground robots through elevation maps. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 284–290. [Google Scholar]
- Couceiro, M.S.; Portugal, D.; Ferreira, J.F.; Rocha, R.P. SEMFIRE: Towards a new generation of forestry maintenance multi-robot systems. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integrations (SII 2019), Paris, France, 14–16 January 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Magagnotti, N.; Spinelli, R.; Kärhä, K.; Mederski, P.S. Multi-tree cut-to-length harvesting of short-rotation poplar plantations. Eur. J. For. Res. 2020, 140, 345–354. [Google Scholar] [CrossRef]
- Bergerman, M.; Billingsley, J.; Reid, J.; van Henten, E. Robotics in Agriculture and Forestry. In Springer Handbook of Robotics; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Li, X.; Li, W.; Yang, Q.; Yan, W.; Zomaya, A.Y. An Unmanned Inspection System for Multiple Defects Detection in Photovoltaic Plants. IEEE J. Photovolt. 2020, 10, 568–576. [Google Scholar] [CrossRef]
- Salmanova, R. Distribution of Species of the Orchidaceae Juss. in the Shrubbery and Forest Vegetation of the Nakhchivan Autonomous Republic. Bull. Sci. Pract. 2020, 6, 62–68. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, J.; Gao, F. Real-time gait planning method for six-legged robots to optimize the performances of terrain adaptability and walking speed. Mech. Mach. Theory 2022, 168, 104545. [Google Scholar] [CrossRef]
- Halme, A.; Luksch, T.; Ylönen, S. Biomimicing motion control of the WorkPartner robot. Ind. Robot. Int. J. 2004, 31, 209–217. [Google Scholar] [CrossRef]
- Nakahata, C.; Uemura, R.; Saito, M.; Kanetsuki, K.; Aruga, K. Estimating harvest costs and projecting quantifies of logging residues for small-scale forestry in Nasushiobara, Tochigi Prefecture, Japan. For. Res. 2014, 12, 965–974. [Google Scholar]
- Lindroos, O.; Ringdahl, O.; La Hera, P.; Hohnloser, P.; Hellström, T.H. Estimating the Position of the Harvester Head—A Key Step towards the Precision Forestry of the Future? Croat. J. For. Eng. 2015, 36, 147–164. [Google Scholar]
- Guerra, S.P.S.; Oguri, G.; Junior, H.D.J.E.; de Melo, R.X.; Spinelli, R. Mechanized harvesting of bamboo plantations for energy production: Preliminary tests with a cut-and-shred harvester. Energy Sustain. Dev. 2016, 34, 62–66. [Google Scholar] [CrossRef]
- Pongpat, P.; Gheewala, S.H.; Silalertruksa, T. An assessment of harvesting practices of sugarcane in the central region of Thailand. J. Clean. Prod. 2017, 142, 1138–1147. [Google Scholar] [CrossRef]
- Xu, J.; Meng, Q.; Wu, J.; Zheng, J.X.; Zhang, X.; Sharma, S. Efficient and Lightweight Data Streaming Authentication in Industrial Automation and Control Systems. IEEE Trans. Ind. Inform. 2020, 17, 4279–4287. [Google Scholar] [CrossRef]
- Adamski, W.; Pazderski, D.; Herman, P. Robust 3D tracking control of an underactuated autonomous airship. IEEE Robot. Autom. Lett. 2020, 5, 4281–4288. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Locks, C.J.; Ferreira, M.E.; Rufino, L.; Chaves, J.H. Estimating wood volume in sawmill yards of Brazilian Amazon by Remotely Piloted Aircraft Systems. In Proceedings of the XVIII Simpósio Brasileiro de Sensoriamento Remoto, São Paulo, Brazil, 28–31 May 2017. [Google Scholar]
- Lin, Y.; Jiang, M.; Yao, Y.; Zhang, L.; Lin, J. Use of UAV oblique imaging for the detection of individual trees in residential environments. Urban For. Urban Green. 2015, 14, 404–412. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef] [Green Version]
- Łukasik, A.; Szuszkiewicz, M.; Wanic, T.; Gruba, P. Three-dimensional model of magnetic susceptibility in forest topsoil: An indirect method to discriminate contaminant migration. Environ. Pollut. 2021, 273, 116491. [Google Scholar] [CrossRef] [PubMed]
- Lindberg, E.; Holmgren, J. Individual tree crown methods for 3D data from remote sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. Isprs J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Li, Q.; Zheng, J.; Zhou, H.; Shu, Y.; Xu, B. Three-dimensional green biomass measurement for individual tree using mobile two-dimensional laser scanning. J. Nanjing For. Univ. 2018, 1, 130–135. [Google Scholar]
- Pierzchała, M.; Giguère, P.; Astrup, R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM. Comput. Electron. Agric. 2018, 145, 217–225. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. Int. J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Junguo, Z.; Huanqing, H.; Chunhe, H.; Youqing, L. Identification Method of Pinus yunnanensis Pest Area Based on UAV Multispectral Images. Trans. Chin. Soc. Agric. Mach. 2018, 49, 249–255. [Google Scholar]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Verma, N.; Singh, D. Analysis of cost-effective sensors: Data Fusion approach used for Forest Fire Application. Mater. Today Proc. 2020, 24, 2283–2289. [Google Scholar] [CrossRef]
- Glauber, A.J.; Moyer, S.; Adriani, M.; Gunawan, I. The Cost of Fire. World Bank Other Oper. Stud. 2016, 1–8. Available online: https://openknowledge.worldbank.org/entities/publication/391e19f4-18f7-56c2-8c28-bb89cc9e7d6f (accessed on 2 December 2022).
- Hesseln, H. Wildland fire prevention: A review. Curr. For. Rep. 2018, 4, 178–190. [Google Scholar] [CrossRef]
- Pastor, E.; Barrado, C.; Royo, P.; Santamaria, E.; Lopez, J.; Salami, E. Architecture for a helicopter-based unmanned aerial systems wildfire surveillance system. Geocarto Int. 2011, 26, 113–131. [Google Scholar] [CrossRef]
- Singh, V.; Sharma, N.; Singh, S. A review of imaging techniques for plant disease detection. Artif. Intell. Agric. 2020, 4, 229–242. [Google Scholar] [CrossRef]
- Ambrosia, V.G.; Wegener, S.S.; Sullivan, D.V.; Buechel, S.W.; Dunagan, S.E.; Brass, J.A.; Stoneburner, J.; Schoenung, S.M. Demonstrating UAV-Acquired Real-Time Thermal Data over Fires. Photogramm. Eng. Remote Sens. 2015, 69, 391–402. [Google Scholar] [CrossRef]
- Ambrosia, V.G.; Wegener, S.; Zajkowski, T.; Sullivan, D.V.; Buechel, S.; Enomoto, F.; Lobitz, B.; Johan, S.; Brass, J.; Hinkley, E. The Ikhana unmanned airborne system (UAS) western states fire imaging missions: From concept to reality (2006–2010). Geocarto Int. 2011, 26, 85–101. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef] [Green Version]
- Charvat, R.; Ozburn, R.; Bushong, S.; Cohen, K.; Kumar, M. SIERRA Team Flight of Zephyr UAS at West Virginia Wild Land Fire Burn. In Proceedings of the Infotech@Aerospace 2012, Garden Grove, CA, USA, 19–21 June 2012. [Google Scholar]
- Zhang, L.; Wang, B.; Peng, W.; Li, C.; Lu, Z.; Guo, Y. Forest fire detection solution based on UAV aerial data. Int. J. Smart Home 2015, 9, 239–250. [Google Scholar] [CrossRef]
- Cruz, H.; Eckert, M.; Meneses, J.; Martínez, J. F Efficient Forest Fire Detection Index for Application in Unmanned Aerial Systems (UASs). Sensors 2016, 16, 893. [Google Scholar] [CrossRef] [Green Version]
- Merino, L.; Caballero, F.; Martínez-de Dios, J.R.; Ferruz, J.; Ollero, A. A cooperative perception system for multiple UAVs: Application to automatic detection of forest fires. J. Field Robot. 2006, 23, 165–184. [Google Scholar] [CrossRef]
- Gayathri Devi, K.; Yasoda, K.; Roy, M.N. Automatic Firefighting System Using Unmanned Aerial Vehicle. In International Conference on Artificial Intelligence for Smart Community; Springer: Singapore, 2022; pp. 1023–1031. [Google Scholar]
- Ghamry, K.A.; Dong, Y.; Kamel, M.A.; Zhang, Y. Real-Time Autonomous Take-off, Tracking and Landing of UAV on a Moving UGV Platform. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Chu, T.; Guo, X. Remote Sensing Techniques in Monitoring Post-Fire Effects and Patterns of Forest Recovery in Boreal Forest Regions: A Review. Remote Sens. 2014, 6, 470–520. [Google Scholar] [CrossRef] [Green Version]
- Dennis, F.C. Fire-Resistant Landscaping; Colorado State University: Fort Collins, CO, USA, 2012; Volume 6, pp. 1–4. [Google Scholar]
- Badescu, A.M.; Cotofana, L. A wireless sensor network to monitor and protect tigers in the wild. Ecol. Indic. 2015, 57, 447–451. [Google Scholar] [CrossRef]
- Andrew, M.E.; Shephard, J.M. Semi-automated detection of eagle nests: An application of very high-resolution image data and advanced image analyses to wildlife surveys. Remote Sens. Ecol. Conserv. 2017, 3, 66–80. [Google Scholar] [CrossRef] [Green Version]
- Radiansyah, S.; Kusrini, M.D.; Prasetyo, L.B. Quadcopter applications for wildlife monitoring. IOP Conf. Ser. Earth Environ. Sci. 2017, 54, 012066. [Google Scholar] [CrossRef] [Green Version]
- Tremblay, J.A.; Desrochers, A.; Aubry, Y.; Pace, P.; Bird, D.M. A low-cost technique for radio-tracking wildlife using a small standard unmanned aerial vehicle. J. Unmanned Veh. Syst. 2017, 5, 102–108. [Google Scholar] [CrossRef] [Green Version]
- Rey, N.; Volpi, M.; Joost, S.; Tuia, D. Detecting animals in African Savanna with UAVs and the crowds. Remote Sens. Environ. 2017, 200, 341–351. [Google Scholar] [CrossRef] [Green Version]
- Fust, P.; Loos, J. Development perspectives for the application of autonomous, unmanned aerial systems (UASs) in wildlife conservation. Biol. Conserv. 2020, 241, 108380. [Google Scholar] [CrossRef]
- Bondi, E.; Dey, D.; Kapoor, A.; Piavis, J.; Shah, S.; Fang, F.; Dilkina, B.; Hannaford, R.; Iyer, A.; Joppa, L.; et al. Airsim-w: A simulation environment for wildlife conservation with UAVs. In Proceedings of the 1st ACM SIGCAS Conference on Computing and Sustainable Societies, Menlo Park/San Jose, CA, USA, 20–22 June 2018; pp. 1–12. [Google Scholar]
- Thapa, G.J.; Thapa, K.; Thapa, R.; Jnawali, S.R.; Wich, S.A.; Poudyal, L.P.; Karki, S. Counting crocodiles from the sky: Monitoring the critically endangered gharial (Gavialis gangeticus) population with an unmanned aerial vehicle (UAV). J. Unmanned Veh. Syst. 2018, 6, 71–82. [Google Scholar] [CrossRef] [Green Version]
- Jones, G.P.I.V.; Pearlstine, L.G.; Percival, H.F. An assessment of small unmanned aerial vehicles for wildlife research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Munishi, L.K. Integrating UAV Technology in an Ecological Monitoring System for Community Wildlife Management Areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Mangewa, L.J.; Ndakidemi, P.A.; Alward, R.D.; Kija, H.K.; Bukombe, J.K.; Nasolwa, E.R.; Munishi, L.K. Comparative Assessment of UAV and Sentinel-2 NDVI and GNDVI for Preliminary Diagnosis of Habitat Conditions in Burunge Wildlife Management Area, Tanzania. Earth 2022, 3, 769–787. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Gini, R.; Passoni, D.; Pinto, L.; Sona, G. Use of Unmanned Aerial Systems for multi-spectral survey and tree classification: A test in a park area of northern Italy. Eur. J. Remote Sens. 2017, 16, 251–269. [Google Scholar]
- Lu, B.; He, Y. Species classification using Unmanned Aerial Vehicle (UAV)-acquired high spatial resolution imagery in a heterogeneous grassland. ISPRS J. Photogramm. Remote Sens. 2017, 128, 73–85. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, A.; Robinson, S.; Turner, D.; Harwin, S.; Kelcey, J. Using a Micro-UAV for Ultra-High Resolution Multi-Sensor Observations of Antarctic Moss Beds. In Proceedings of the XXII Isprs Congress 2012, Melbourne, Australia, 25 August–1 September 2012. [Google Scholar]
- Hellström, T.; Hohnloser, P.; Ringdahl, O. Tree Diameter Estimation Using Laser Scanner; Umeå Universitet: Umeå, Sweden, 2014; pp. 1–15. [Google Scholar]
- Esposito, F.; Rufino, G.; Moccia, A.; Donnarumma, P.; Esposito, M.; Magliulo, V. An Integrated Electro-Optical Payload System for Forest Fires Monitoring from Airborne Platform. In Proceedings of the 2007 Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Suárez, J.C.; Smith, S.; Bull, G.; Malthus, T.J.; Donoghue, D.; Knox, D. The use of remote sensing techniques in operational forestry. J. Jpn. Soc. Surg. Hand 2005, 17, 190–193. [Google Scholar]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef] [Green Version]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-weight multispectral UAV sensors and their capabilities for predicting grain yield and detecting plant diseases. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; p. 41. [Google Scholar]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Picariello, F.; Tudosa, I. Sensors and Measurements for UAV Safety: An Overview. Sensors 2021, 21, 8253. [Google Scholar] [CrossRef]
- Li, L.; Chen, J.; Mu, X.; Li, W.; Yan, G.; Xie, D.; Zhang, W. Quantifying Understory and Overstory Vegetation Cover Using UAV-Based RGB Imagery in Forest Plantation. Remote Sens. 2020, 12, 298. [Google Scholar] [CrossRef] [Green Version]
- Dalponte, M.; Marzini, S.; Solano-Correa, Y.T.; Tonon, G.; Vescovo, L.; Gianelle, D. Mapping forest windthrows using high spatial resolution multispectral satellite images. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102206. [Google Scholar] [CrossRef]
- Shin, J.-I.; Seo, W.-W.; Kim, T.; Park, J.; Woo, C.-S. Using UAV Multispectral Images for Classification of Forest Burn Severity—A Case Study of the 2019 Gangneung Forest Fire. Forests 2019, 10, 1025. [Google Scholar] [CrossRef] [Green Version]
- Shoot, C.; Andersen, H.-E.; Moskal, L.M.; Babcock, C.; Cook, B.D.; Morton, D.C. Classifying Forest Type in the National Forest Inventory Context with Airborne Hyperspectral and Lidar Data. Remote Sens. 2021, 13, 1863. [Google Scholar] [CrossRef]
- Yang, S.; Hu, L.; Wu, H.; Ren, H.; Qiao, H.; Li, P.; Fan, W. Integration of crop growth model and random forest for winter wheat yield estimation from UAV hyperspectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6253–6269. [Google Scholar] [CrossRef]
- Maffei, C.; Lindenbergh, R.; Menenti, M. Combining multi-spectral and thermal remote sensing to predict forest fire characteristics. ISPRS J. Photogramm. Remote Sens. 2021, 181, 400–412. [Google Scholar] [CrossRef]
- Still, C.; Powell, R.; Aubrecht, D.; Kim, Y.; Helliker, B.; Roberts, D.; Richardson, A.D.; Goulden, M. Thermal imaging in plant and ecosystem ecology: Applications and challenges. Ecosphere 2019, 10, e02768. [Google Scholar] [CrossRef] [Green Version]
- Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Queinnec, M.; Luther, J.E.; Bolton, D.K.; White, J.C.; Wulder, M.A.; van Lier, O.R.; Hermosilla, T. Modelling lidar-derived estimates of forest attributes over space and time: A review of approaches and future trends. Remote Sens. Environ. 2021, 260, 112477. [Google Scholar] [CrossRef]
- Meng, P.; Wang, H.; Qin, S.; Li, X.; Song, Z.; Wang, Y.; Yang, Y.; Gao, J. Health assessment of plantations based on LiDAR canopy spatial structure parameters. Int. J. Digit. Earth 2022, 15, 712–729. [Google Scholar] [CrossRef]
- Kamoske, A.G.; Dahlin, K.M.; Stark, S.C.; Serbin, S.P. Leaf area density from airborne LiDAR: Comparing sensors and resolutions in a temperate broadleaf forest ecosystem. For. Ecol. Manag. 2019, 433, 364–375. [Google Scholar] [CrossRef]
- Tanase, M.A.; Villard, L.; Pitar, D.; Apostol, B.; Petrila, M.; Chivulescu, S.; Leca, S.; Borlaf-Mena, I.; Pascu, I.S.; Dobre, A.C.; et al. Synthetic aperture radar sensitivity to forest changes: A simulations-based study for the Romanian forests. Sci. Total Environ. 2019, 689, 1104–1114. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Liu, Y.; Müller, R. Detection of passageways in natural foliage using biomimetic sonar. Bioinspiration Biomim. 2022, 17, 056009. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef] [Green Version]
- Burdziakowski, P.; Bobkowska, K. UAV Photogrammetry under Poor Lighting Conditions—Accuracy Considerations. Sensors 2021, 21, 3531. [Google Scholar] [CrossRef] [PubMed]
- Elsayed, M.; Mohamed, M. The impact of airspace regulations on unmanned aerial vehicles in last-mile operation. Transp. Res. Part D: Transp. Environ. 2020, 87, 102480. [Google Scholar] [CrossRef]
- CASA. Unmanned Aircraft and Rockets:Model Aircraft.Advisory Circular AC-101-3; CIVIL Aviation Safety Authority Australia: Canberra, Australia, 2002.
- Celt, V.; Jurakić, G.; Mađer, M.; Toćić, H. Unmanned Aircraft Systems—Successful Usage Limited by the Regulation? In Proceedings of the International Symposium on Engineering Geodesy-Sig, Varaždin, Croatia, 20–22 May 2016. [Google Scholar]
- Salvano, D.P. Unmanned Aircraft Systems (UAS)—Regulatory Policy and Processes: A Moving Landscape—A US Perspective; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Joosen, R.; Haverland, M.; de Bruijn, E. Shaping EU agencies’ rulemaking: Interest groups, national regulatory agencies and the European Union Aviation Safety Agency. Comp. Eur. Politics 2022, 20, 441–442. [Google Scholar] [CrossRef]
- Lamon, M. Remotely Piloted Aircraft Systems: The future of aviation. Rev. Derecho Transp. Terr. Marítimo Aéreo Multimodal 2022, 29, 151–167. [Google Scholar]
- C/2019/3824; Commission Implementing Regulation (EU) 2019/947 on the Rules and Procedures for the Operation of Unmanned Aircraft. European Commission: Brussels, Belgium, 2019; p. 4571. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32019R0947 (accessed on 24 May 2019).
- C/2019/182; Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft System. European Commission: Brussels, Belgium, 2019; pp. 1–40. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:32019R0945 (accessed on 12 March 2019).
- Jarus. JARUS Guidelines on Specific Operations Risk Assessment (SORA); SORA STS-01; Jarus: Rome, Italy, 2019; Available online: http://jarus-rpas.org/content/jar-doc-06-sora-package (accessed on 6 March 2019).
- Jarus. JARUS Guidelines on Specific Operations Risk Assessment (SORA); SORA Version 2.5; Jarus: Rome, Italy, 2022; Available online: http://jarus-rpas.org/jarus-external-consultation-sora-version (accessed on 2 December 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grades | Control Mode | Description | Characteristic |
|---|---|---|---|
| 0 | Remote control | Flight by operator on the ground (100% control time) | Manually controlled aircraft |
| 1 | Simple automation | Perform tasks under the supervision of an operator with the assistance of an automatic control device (80% control time) | Autopilot instrument |
| 2 | Remote automatic operation | Execute preprogrammed tasks (50% control time) | Fly according to the preset waypoints |
| 3 | Semi-automatic | Perform complex tasks autonomously. Has environmental awareness. Make routine decisions. (20% control of time) | Automatic takeoff/landing The task can continue after the link is broken |
| 4 | Fully autonomous control | Have broad situational awareness and have the ability and authority to make comprehensive decisions (<5% Control time) | Automatic task planning; Has the ability to cooperate with other units or systems |
| 5 | Cooperative control | Multiple UAVs work in teams | Learning by itself and has ability of self-organization and coordination |
| Categories | Application | Utilized Equipment | Harvesting |
|---|---|---|---|
| Motor-manual (MM) full tree | Tree felling, extraction, and processing | Chainsaw, cable skidder, delimber | FT |
| Fully mechanized (FM) full tree | Tree felling, extraction, and processing | Feller, buncher, skidder, delimber/processor | FM, FT |
| Motor-manual tree length | Tree felling, delimbering, and extraction | Chainsaw, skidder | MM, TL |
| Motor-manual cut-to-length | Tree felling, extraction, and processing | Chainsaw, forwarder | MM, CTL |
| Fully mechanized cut-to-length | Tree felling, extraction, and processing | Harvester, forwarder | FM, CTL |
| Feature | Definition | Wheeled | Tracked | Legged |
|---|---|---|---|---|
| Maximum speed | maximum speed on flat and compact surfaces in the absence of obstacles | High | medium/high | low/medium |
| Obstacle crossing | the capability of crossing obstacles with random shapes in unstructured environments (e.g., rocks) | Low | medium/high | high |
| Step/stair climbing | capability of climbing up single steps and stairs in environments structured for humans | Low | medium | high |
| Slope climbing | capability of climbing compact slopes with a sufficient friction coefficient (>0.5) | low/medium | high | medium/high |
| Walking capability (soft terrain) | capability of walking on soft and yielding terrains (e.g., sand) | Low | high | low/medium |
| Walking capability (uneven terrain) | capability of walking on uneven terrains (e.g., grassy ground, rocky ground) | Low | medium/high | high |
| Energy efficiency | energy efficiency in normal operating conditions, on flat and compact terrains | High | medium | low/medium |
| Mechanical complexity | level of complexity of the mechanical architecture | Low | low | high |
| Control complexity | level of complexity of the control system (hardware and software) | Low | low | high |
| Technology readiness | level of maturity of the necessary enabling technologies | Full | full | full/in progress |
| Year | Aircraft | Flights | Hours | Wildfire Mission |
|---|---|---|---|---|
| 2006 | Altair | 4 | 68 | Mono Lake Prescribed Fire |
| 2007 | Ikhana | 12 | 89 | Columbine, Hardscrabble |
| 2008 | Ikhana | 4 | 21 | North Mountain, American River |
| 2009 | Ikhana | 2 | 11 | Piute, Station Fire |
| Auxiliary | Specific | |
|---|---|---|
|
|
|
| Sample | Platform | Type | Objective | Application | Country | Area | Camera |
|---|---|---|---|---|---|---|---|
| Midhun [100] | DJI phantom 3 | Rotary-wing | Live plant | Individual tree detection | USA | 32 ha | Compact RGB digital |
| Charton [100] | Swinglet CAM | Fixed-wing | Stack and logs in sawmill | Wood volume extraction | Canada | 50 hectares | Digital RGB |
| Lin [102] | Microdrone Md4-200 | Rotary-wing | Urban forestry and greening | Individual tree detection | Finland | NA | Digital compact |
| Dash [111] | Aeronavics SkyJib | Rotary-wing | Pinus radiata D. Don trees | Assessing forest health | New Zealand | 2.7 ha | MicaSense RedEdge 3 |
| Dempewolf [103] | DJI phantom 3 Pro | Rotary-wing | Deciduous species | Tree height measurement | Germany | 2 ha | RGB camera |
| Birdal [104] | eBee | Fixed-wing | Black and Scots pines | Tree height estimating | Turkey | 1 ha | Canon IXUS 12 7HS |
| Luis [22] | DJI S800 | Rotary-wing | Koala, deer, and kangaroo | Wildlife monitoring | Australia | NA | Thermal camera/RGB camera |
| Gini [136] | Microdrone MD4-200 | Rotary-wing | Deciduous species | Tree classification | Italy | 1 ha | Pentax Optio A40/Sigma DP1 |
| Puliti [165] (2018) | eBee | Fixed-wing | Deciduous species | Stock volume estimation | Norway | 7300 ha | Canon IXUS/ELPH |
| Nicolas [134] | eBee | Fixed-wing | Large mammals | Wildlife monitoring | Namibia | 10,300 ha | Compact camera |
| Pierrot [144] (Lisein J. et al., 2013) | Gatewing X100, | Fixed-wing | Deciduous species | Forest canopy modelling | Belgium | 200 ha | Ricoh GR3 still camera |
| Michale [10] | The Vector P | Fixed-wing | Wildfires | Wildfire monitoring | USA | NA | Color/infrared cameras |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Yan, H.; Hassanalian, M.; Zhang, J.; Abdelkefi, A. UAV Platforms for Data Acquisition and Intervention Practices in Forestry: Towards More Intelligent Applications. Aerospace 2023, 10, 317. https://doi.org/10.3390/aerospace10030317
Sun H, Yan H, Hassanalian M, Zhang J, Abdelkefi A. UAV Platforms for Data Acquisition and Intervention Practices in Forestry: Towards More Intelligent Applications. Aerospace. 2023; 10(3):317. https://doi.org/10.3390/aerospace10030317
Chicago/Turabian StyleSun, Huihui, Hao Yan, Mostafa Hassanalian, Junguo Zhang, and Abdessattar Abdelkefi. 2023. "UAV Platforms for Data Acquisition and Intervention Practices in Forestry: Towards More Intelligent Applications" Aerospace 10, no. 3: 317. https://doi.org/10.3390/aerospace10030317
APA StyleSun, H., Yan, H., Hassanalian, M., Zhang, J., & Abdelkefi, A. (2023). UAV Platforms for Data Acquisition and Intervention Practices in Forestry: Towards More Intelligent Applications. Aerospace, 10(3), 317. https://doi.org/10.3390/aerospace10030317