In this section, a short overview of the analysed aircraft and wiring options, as well as the used software tools and the theoretical backgrounds used in the later evaluation, is given. The conceptional aircraft design tasks are performed using the aircraft design and evaluation environment MICADO, developed by the Institute of Aerospace Systems of the RWTH Aachen University, to iterate the complete aircraft design, while the rudder sizing is performed via MATLAB®-based tools.
2.1. Overview of the Conceptual Aircraft Design Tool MICADO
For the analysis of the aircraft, the multidisciplinary-integrated conceptual aircraft design and optimization (MICADO) environment is used [
13,
14]. MICADO is an extended version of the university conceptual aircraft design and optimization (UNICADO) environment [
15] and was developed at the RWTH Aachen University’s Institute of Aerospace Systems (ILR) in 2008.
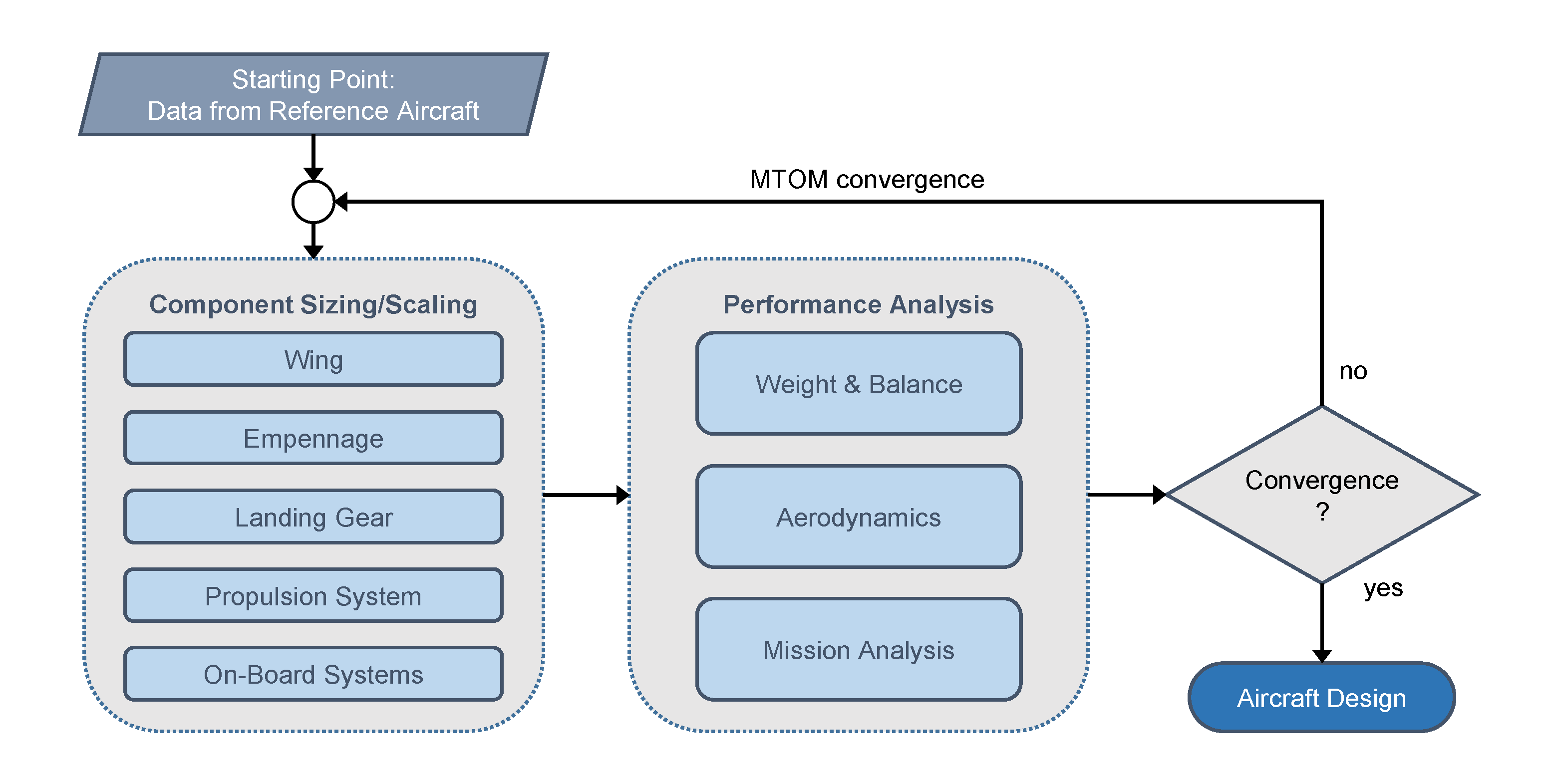
As shown in
Figure 2, the MICADO aircraft design process features an iterative part including aircraft component sizing, detailed system design and a design analysis step. The iteration is repeated until selected parameters of the aircraft, e.g., maximum takeoff mass (MTOM), operating empty mass (OME), mission fuel mass and lateral position of the aircraft’s centre of gravity, do not change more than user-defined margins between two consecutive iteration steps.
As comprehensive descriptions of MICADO and its tools can be found in the previously mentioned references, the following paragraphs focus on the MICADO tools and equations most important for this study.
The volume coefficient of the vertical tail determines its area. The value of the volume coefficient is either set by the user or calculated using an existing tail geometry.
Whereas mass estimation of most aircraft components, such as fuselage, landing gear, tail plane, is performed using semi-empirical handbook methods, wing mass estimation stands out as a tool based on analytical and semi-empirical methods. This tool takes into account the effect of point masses representing propulsion system components on the resulting wing structure and mass [
16]. The secondary wing structure mass and mass penalties were estimated with semi-empirical methods; however, mass penalties due to aeroelastic effects were not included. Since the tail plane and electrical conductors are the focus of this study, applied methodologies for the estimation of their masses are presented in the following. The approach for estimation of the mass of the tail surfaces is taken from [
17]. The fin mass is calculated in pounds according to Equation (
1) and later converted to kilograms,
where
is the fin area including the rudder,
the ultimate load factor,
the span of the fin,
the reference wing area,
the average airfoil thickness of the fin and
the average sweep of the quarter chord line.
For calculation of the power cable masses according to Stückl [
18], the length of the conductor using the positions of the components connected by each conductor, and the power to be transferred (in terms of current
I and voltage
U) by each conductor is taken into account. Moreover, for calculation of the overall conductor mass, the copper wire itself as well as insulation and sheath materials are considered. Assumptions regarding material constants and equations can be found in
Table 1.
Within the aerodynamic performance estimation module, lift and induced drag of the clean wing configuration are calculated using the German Aerospace Centre’s LIFTING_LINE [
19]. This program is able to consider the propeller-induced velocities on wing aerodynamics. Propeller-induced velocities are calculated for cruise conditions using a blade element momentum theory. The results are added to the LIFTING_LINE inputs. A more detailed description of this process can be found in [
16]. Remaining drag components of the lifting surfaces and the remaining aircraft components are estimated using semi-empirical handbook methods. Most important for the study at hand is the estimation of the fin’s viscous drag, calculated following an approach by Raymer [
20]:
where
is the flat-pate skin-friction drag coefficient of the fin,
is the form factor of the fin,
Q is a interference factor,
is the fin’s wetted area and
is the wing’s reference area.
The entire design and convergence process with the modules employed for this study is shown in
Figure 2 above.
2.2. Reference and Concept Aircraft
Based on the outcome of a market analysis, the Beechcraft 1900D was chosen as the reference aircraft. According to the results of an initial technology identification and selection process (with respect to technologies associated with aircraft propulsion system electrification), a partial turboelectric propulsion system featuring two gas turbines supplemented with two electrically driven propellers on the wing tips for a reduction in induced drag was selected as the most promising concept for the evaluation in a year-2025-scenario [
21]. The basic assumption in the technology selection process was that an aircraft with electrified propulsion systems needs to fulfil identical mission requirements as current conventional aircraft in terms of its range, speed and passenger capacity in order to be recognized as a viable alternative.
Based on data of the Beechcraft 1900D and the PT6A-67D turboprop engines available to the public, such as the Pilot Operating Handbook [
22] and the EASA-issued engine type certificate [
23], a redesign of this aircraft was conducted using the MICADO environment [
15], see
Figure 3 left. In order to obtain a comparable conventional reference aircraft, some adjustments were made prior to the electrification of the Beechcraft 1900D. First, the wing was moved from a low to a high position to ensure sufficient ground clearance for the wing tip propellers. Corresponding to this, the position of the landing gear was moved from the wing to the fuselage. Lastly, the engine performance and the scaling factors of the mass estimation methodologies were adjusted according to the description in
Section 2.1. The resulting aircraft from a further execution of the aircraft design loop after these changes served as the conventional reference for subsequent comparisons, depicted in the centre-left of
Figure 3.
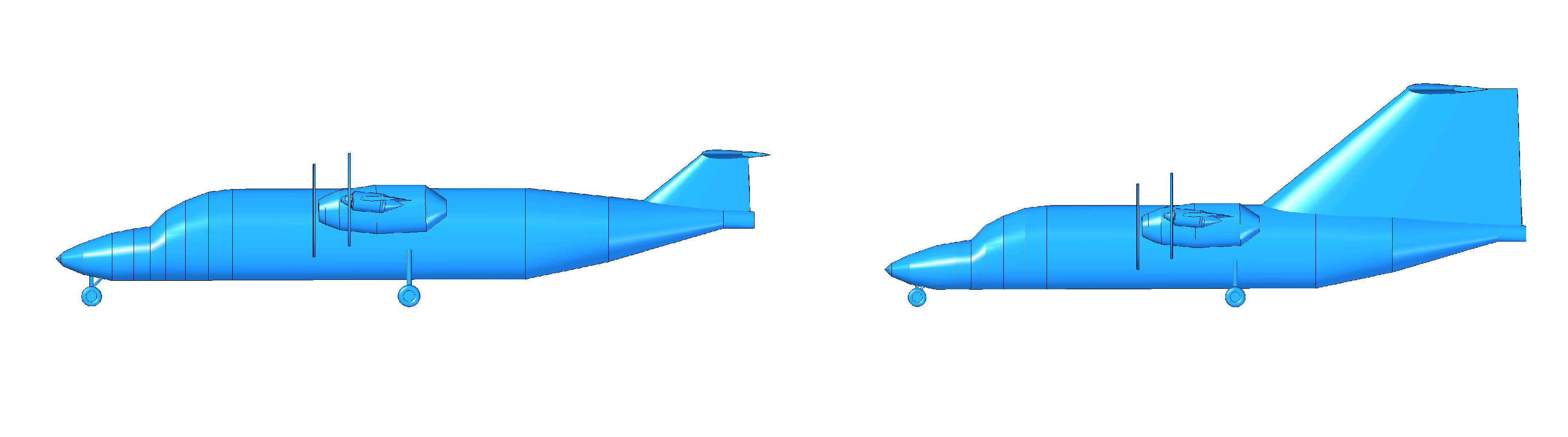
In a second major modification step, the conventional propulsion system was exchanged with the partial turboelectric propulsion system, leading to the PT2025 aircraft configuration, see
Figure 3 centre-right. The positions of the gas turbines of this aircraft do not change compared to the conventional reference aircraft. They are supplemented by two electric wing tip propellers that are powered directly from two generators mechanically connected to the gas turbines. Subsequently, an aerodynamic optimization of the propeller positions revealed a further outboard location of the conventionally driven propellers, leading to the derivative aircraft design PT2025opt [
16]. Since MICADO considers only static loads, the estimation of the wing mass was conducted based on the sizing of the wing box structure considering the three quasi-static load cases, pull-up, gust and landing. Aeroelastic investigations were conducted by numerical flutter analysis and showed that no critical flutter instabilities occur up to 1.2 times the dive speed.
Figure 3 shows the optimized aircraft configuration on the right-hand side.
For all aircraft configurations the same design mission, 510 NM trip with 100 NM diversion distance reserve and a 45 min holding, was used. Cruise altitude was set to 23,000 ft at a cruise speed of Mach 0.4.
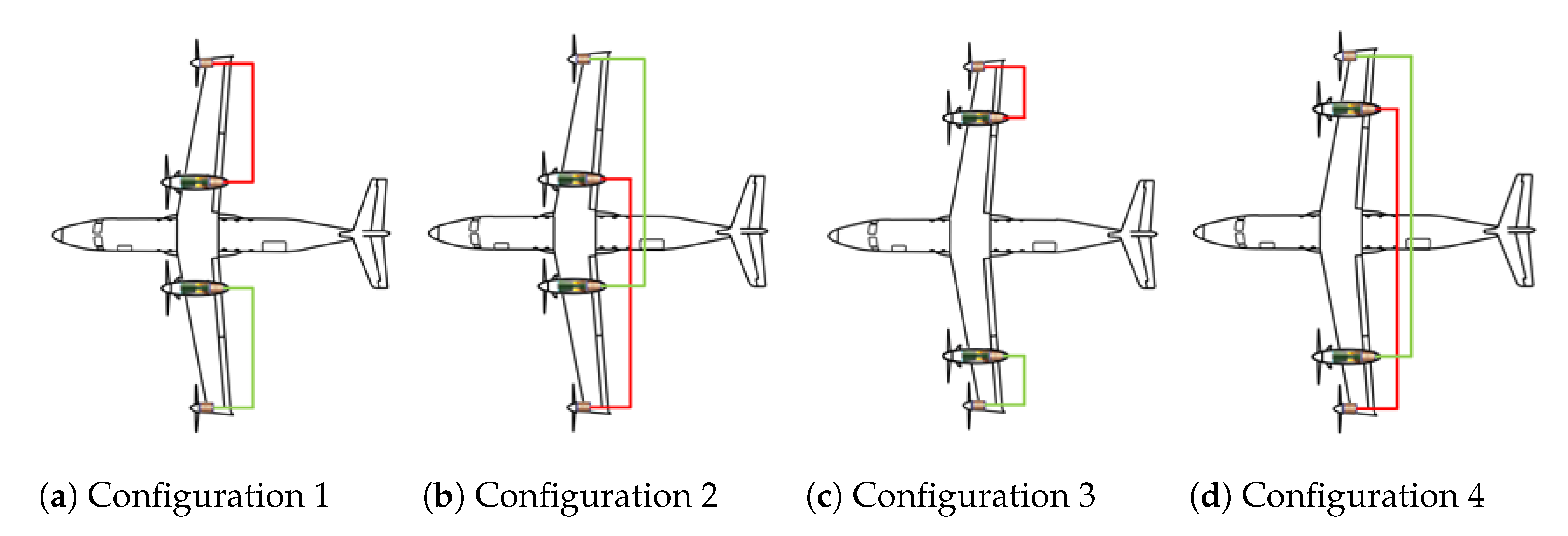
2.3. Considered Wiring Configurations
The partial turboelectric powertrain architecture in this study uses four propellers, two driven by electric motors and two driven by gas turbines. Each electric motor is directly coupled via cables to its related generator, which converts part of the shaft power of the gas turbine, sparing the use of large electric energy storage devices. This configuration enables two wiring options, as suggested by [
21]. An “on-wing wiring” approach, where the gas turbine on one wing is coupled to the electric motor on the same wing and a “cross wiring (x-wiring)” approach where the gas turbine is coupled to the electric motor on the opposite wing. Both wiring options can be seen in
Figure 1 for the PT2025 and PT2025opt configuration, respectively. The red and green lines symbolize two separate and independent wiring harnesses, each connecting one gas turbine driven generator to one electric motor.
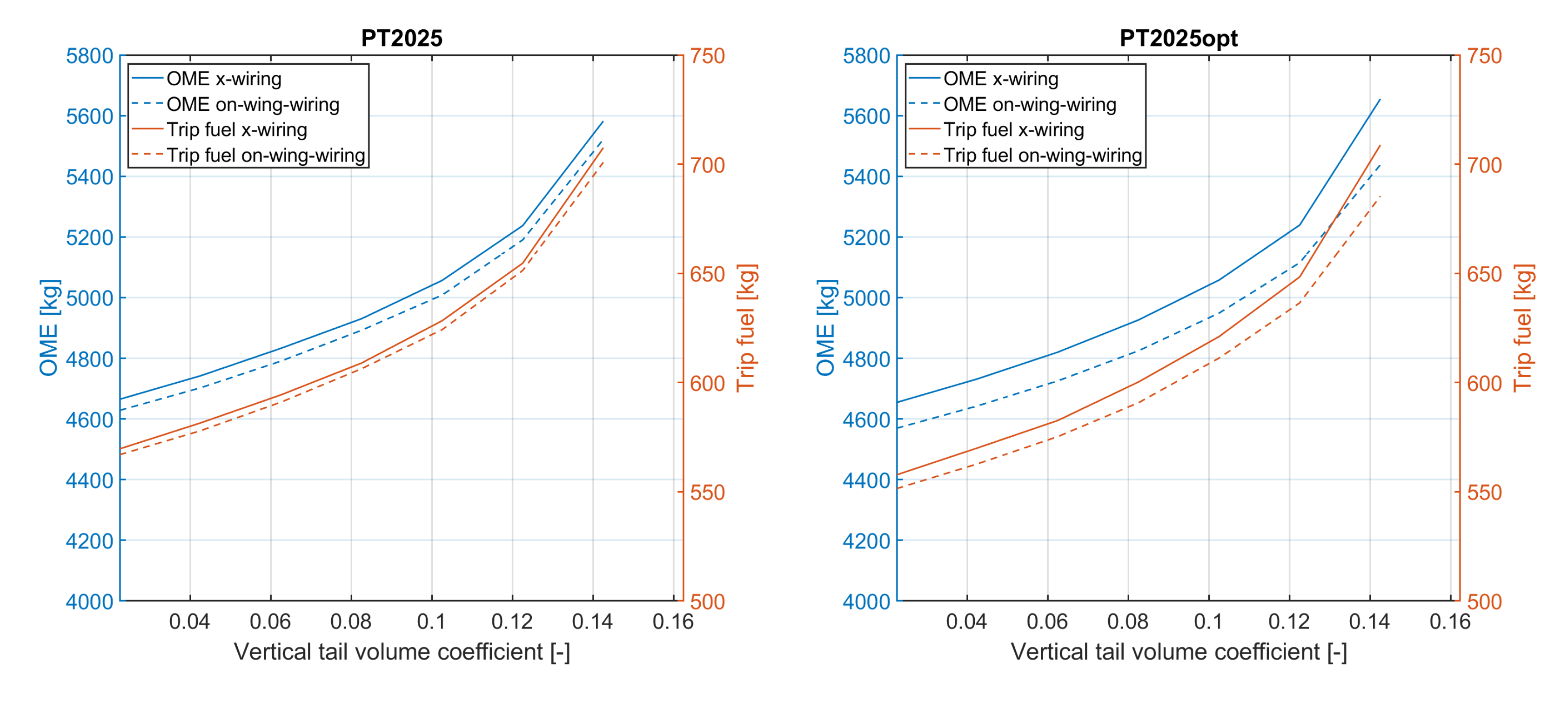
Some parameters of the different configurations are listed in
Table 2. All four aircraft are similar to each other and have roughly the same wingspan, differing only
m. The PT2025opt aircraft are lighter than the PT2025 aircraft with the same wiring option, as the further outboard positioning of the gas turbine engines reduces the structural mass of the wing. The different positions of the gas turbine can also be seen in the conductor mass, where the difference between the “on-wing” and “cross-wing” option is larger for the PT2025opt aircraft due to the increased difference in the necessary cable lengths that can be seen in
Figure 1. The increased aerodynamic efficiency of the PT2025opt aircraft, as mentioned in
Section 2.2, can be seen in the trip fuel mass. The PT2025opt aircraft with cross wiring (Configuration 4) has a higher OME and MTOM than the PT2025 aircraft with on-wing wiring (Configuration 1), but uses
less fuel over the same mission.
2.4. Handbook Methods for Vertical Tail Plane Sizing According to Roskam
For the resizing of the vertical stabilizer, methods from Part II [
24] and Part VI [
25] of Roskam’s book series on airplane design are used. This series covers the whole design process of an aircraft, from the preliminary design phase to the detailed construction of the different components and serves as standard literature in aircraft design. Most of the formulas from Roskam used in this paper are empirical correlations mainly derived from the DATCOM study of the United States Air Force [
19], where an extensive number of experiments to gather data and to derive empirical equations was performed. As the methods used in this study are intended to be used within a preliminary aircraft design and iterated intensively during the mission data interpolation, the computation performance requirements should be kept at a minimum. According to Ciliberti et al. [
4] this can be achieved using handbook methods. The error contained within the DATCOM method and hence their derivatives, Roskam [
24,
25] being one of them, lays around
for vertical tail aspect ratios of
. As the investigated aspect ratios are around
, the error can be neglected for the configuration in this paper.
According to Roskam [
24], a first idea of the required VTP size for conventional configurations can be estimated using the so called volume coefficient, defined as
where
is the vertical tail volume coefficient,
the VTP area,
the reference wing area,
b the wing span and
the longitudinal distance from the aircraft’s centre of gravity (CG) to the VTP’s aerodynamic centre. As seen in Equation (
3) the formula lacks any significance concerning the controllability of the investigated design and is solely derived from the evaluation of mostly conventional configurations, already in service.
In Part II “Preliminary configuration design and integration of the propulsion system” [
24], the rudder deflection required to keep the aeroplane stable in case of OEI is given as
with the reference wing area
, the wing span
b and the yawing moment of the remaining engine(s)
. According to [
24], the yawing moment resulting from the parasitic drag increase in the inoperative engine
for a propeller-driven aircraft with variable pitch propellers is
times
. The dynamic pressure
is calculated at the minimum control speed
, with
being the lowest stall speed.
is the so-called control power derivative. The value of
should not exceed
[
24].
The control power derivative can be obtained via the following formula from Roskam’s Part VI [
25]:
where
and
are the horizontal and vertical distances, respectively, between the CG of the aircraft and the aerodynamic centre (
) of the vertical tail and
is the angle of attack of the aircraft. The “side-force-due-to-rudder” derivative
is calculated via:
where
is the surface area of the vertical tail and the coefficients
,
,
,
and the lift curve slope of the vertical tail
can be obtained from Roskam [pp. 228–261] [
25].
with the semi-chord sweep angle of the vertical tail
and
where
is the Mach number corresponding to the minimum control speed.
is the lift curve slope of the VTP at the same Mach number which can be calculated from
The effective aspect ratio of the vertical tail
in Equation (
7) is obtained via
with the vertical tail aspect ratio
where
and
are the span and the area of the vertical tail, respectively, whereas the coefficients
,
and
are obtained from Roskam [p.388 - p.390] [
25].
2.5. Calculation of the Vertical Tail Plane Geometry
The calculation of the vertical tail size is performed via a MATLAB
® script that loops the whole process described in
Section 2.4. The needed aircraft parameters are obtained from the aircraft designs calculated in MICADO. For atmospheric parameters, the ICAO standard atmosphere [
26] at sea level is used. Depending on the wiring configuration selected (on-wing or cross wiring), the yawing moments resulting from the thrust of the remaining engines and the drag from the inoperative propellers are determined. Then, starting from a simplified original geometry of the VTP, the initial values for the coefficients and derivatives are calculated. In order to be able to utilize the aforementioned diagrams from Roskam Part VI [
25], they were evaluated at discrete points and implemented as tables, splines or polynomial equations and interpolated between the given values. Using Roskam’s statement that the maximum rudder deflection must not be more than
, Equation (
4) gives the maximum value for
and via Equation (
5) the maximum
. The resulting new surface of the vertical tail plane can be derived from Equation (
6).
With the assumption that the shape of the vertical tail as well as the outer profile depth and longitudinal position of the horizontal stabilizer do not change, the new vertical tail geometry and the new position of the aerodynamic centre can be calculated. These serve as an updated starting point for the calculation of the corrected coefficients and the iteration begins again. This is performed until the difference between the newly calculated surface area and the previous one is beneath the convergence limit, set to for this study.
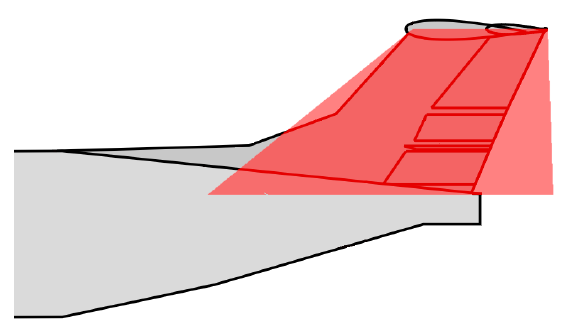
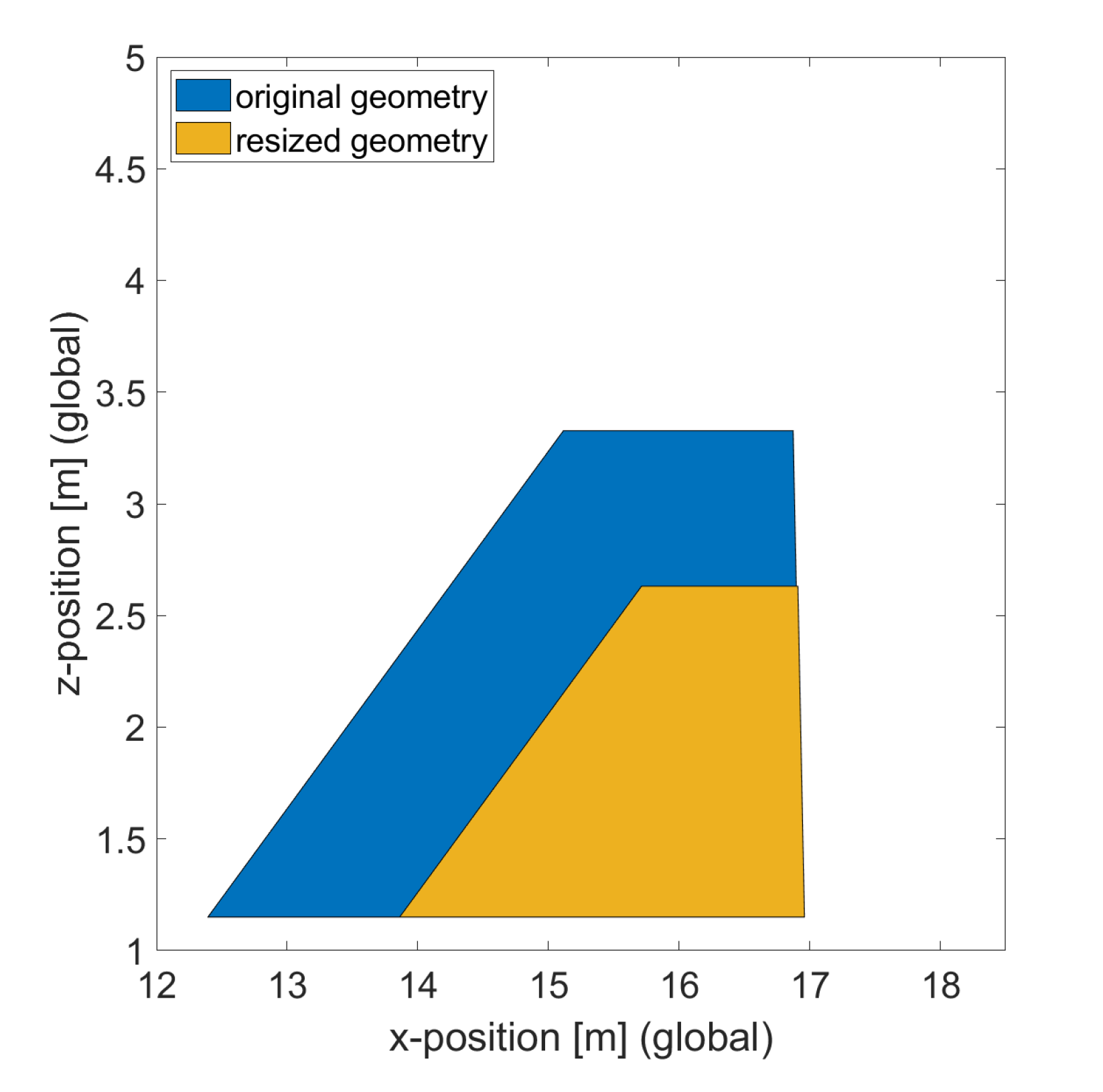
To carry out this investigation, some simplifications are made. First, the geometric shape of the vertical tail plane is simplified to correlate with Roskam’s assumptions. The original Beechcraft 1900D, as well as the partial turboelectric aircraft described in
Section 2.2, feature a vertical tail with a rather complex geometry. With the equations from Roskam it is very difficult to accurately model this shape, as they only give the surface area, the span and the sweep angle. Therefore, the vertical tail is changed to a simple trapezoid whilst maintaining the surface area and the average sweep angle of the original tail to minimize the effects of this simplification. The position of the horizontal tail and the profile depth of the top of the vertical tail are kept constant to minimize the influence on the longitudinal stability of the aircraft. The simplified and original geometry can be seen in
Figure 4.
The fuselage, on the other hand, is kept the same and held constant for all calculations. Only the size and position of the wing and the vertical and horizontal tail are allowed to change. The power-split between the different engines is also fixed, each propulsor contributes equally to the total thrust of the aircraft. Possible reductions in the power setting of the electric motors in case of engine loss are not taken into account in this study.
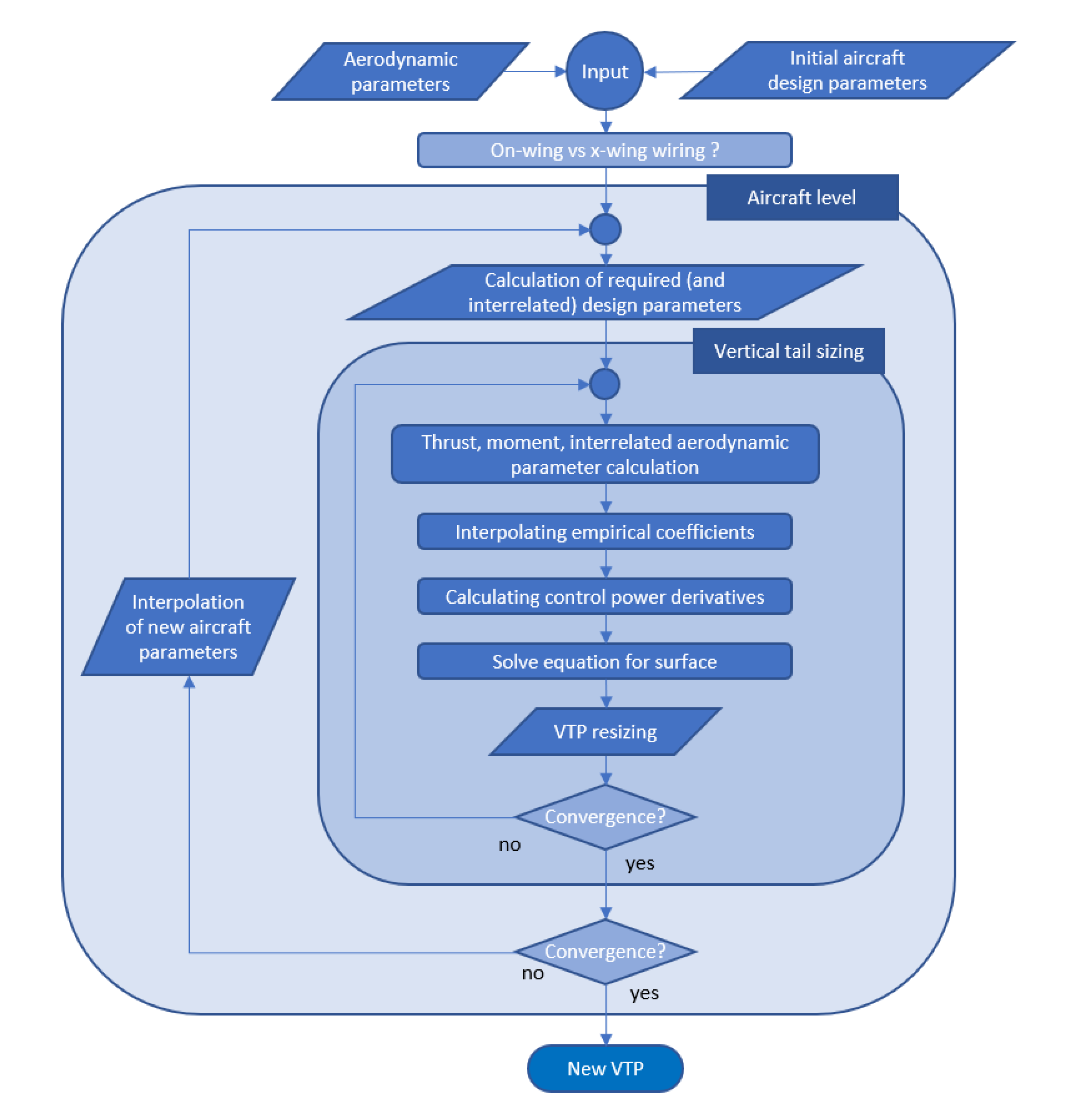
2.6. Iteration Over the Whole Aircraft
A change in the size of the vertical tail has accumulating effects on the whole aircraft—the structural mass, the CG change, and the drag of the aircraft. Therefore, a redesign of the aircraft is necessary to achieve a feasible configuration. This redesign, in turn, has an influence on the required size of the vertical tail. In order to capture these interrelated effects and to obtain a more accurate estimation of the necessary vertical tail size, the methods described in
Section 2.4 are extended to take into account the changes in the overall aircraft design. This is performed in two steps. First, the MICADO environment is used to carry out a parametric aircraft design study on a range of fin volume coefficients for all four concept aircraft. Starting from a value of
, the volume coefficient is increased in steps of
up to
and the resulting aircraft parameters, including among others the fin size, are put out into a data table. This parametric study also includes the fin volume coefficient of
of the original Beechcraft 1900D. The data table mentioned before is used as a data source for the subsequent sizing loop of the vertical tail. Second, the iterative design loop for the sizing of the vertical tail which is executed as follows.
The initial iteration step uses the aircraft data from the database created before which belongs to the entry of the original fin volume coefficient of
. The dataset includes information on e.g., propeller positions and maximum takeoff thrust from the aircraft. Based on this, a new size for the vertical tail is calculated using the algorithm described in
Section 2.5, taking into account the propeller positions and wiring options of the partial turboelectric propulsion system. The second and all subsequent iteration steps start with an interpolation of the aircraft data with respect to the previously determined size of the vertical tailplane and the aircraft data, obtained from the parameter study on different fin volume coefficients. Among others, this yields new propeller positions due to changes in wingspan and values for maximum takeoff thrust. As described for the first iteration step, this interpolated data is used to update the size of the vertical tailplane. This process is repeated until the area of the vertical tailplane does not change more than
between two consecutive iteration steps. The whole iteration process, including the steps from
Section 2.5, can be seen in
Figure 5.
2.7. Assumptions and Restrictions
As stated in
Section 2.4, the assumptions are based on the usability of handbook methods, as validated by Ciliberti et al. [
4]. Therefore, the suitability of the correction method described in this paper is only valid for configurations with similar properties. These are a high-wing configuration, a comparable tail-cone geometry and a VTP aspect ratio of around
. Additionally, a VTP shape close to the simplified versions of [
25] should be considered. As mentioned in the introduction, according to [
6] the additional rolling motion due to the local absence of power augmented lift downstream of the propellers is neglected. As the wing tip propellers reduce the induced drag, their failure will increase the induced drag slightly. As the total reduction in induced drag through the use of a wing tip propulsion is only around
for the investigated aircraft [
16], this effect is neglected. To reduce the complexity of this study, the propeller-induced side wash interaction on the vertical tail and the possible lift increase on the wing due to the induced velocity, are neglected.
A possible solution to reduce the VTP size for the PT2025 configurations could be the implementation of an automatic thrust control system, which is able to reduce the thrust on the electric engine quickly in case of a failure of the conventional engine, according to CS23.904 [
8]. Another possibility would be the interconnection of all electric machines or the implementation of a buffer battery. This way, the electric propellers could still operate if one combustion engine fails. The downside to this would be the increased weight due to the added components and the increased complexity, which is why this case was not considered in this study.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}