
Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System

Abstract
:1. Introduction
2. Dynamic Model of a Driving Shaft and Solar Arrays with Flexible Hinges
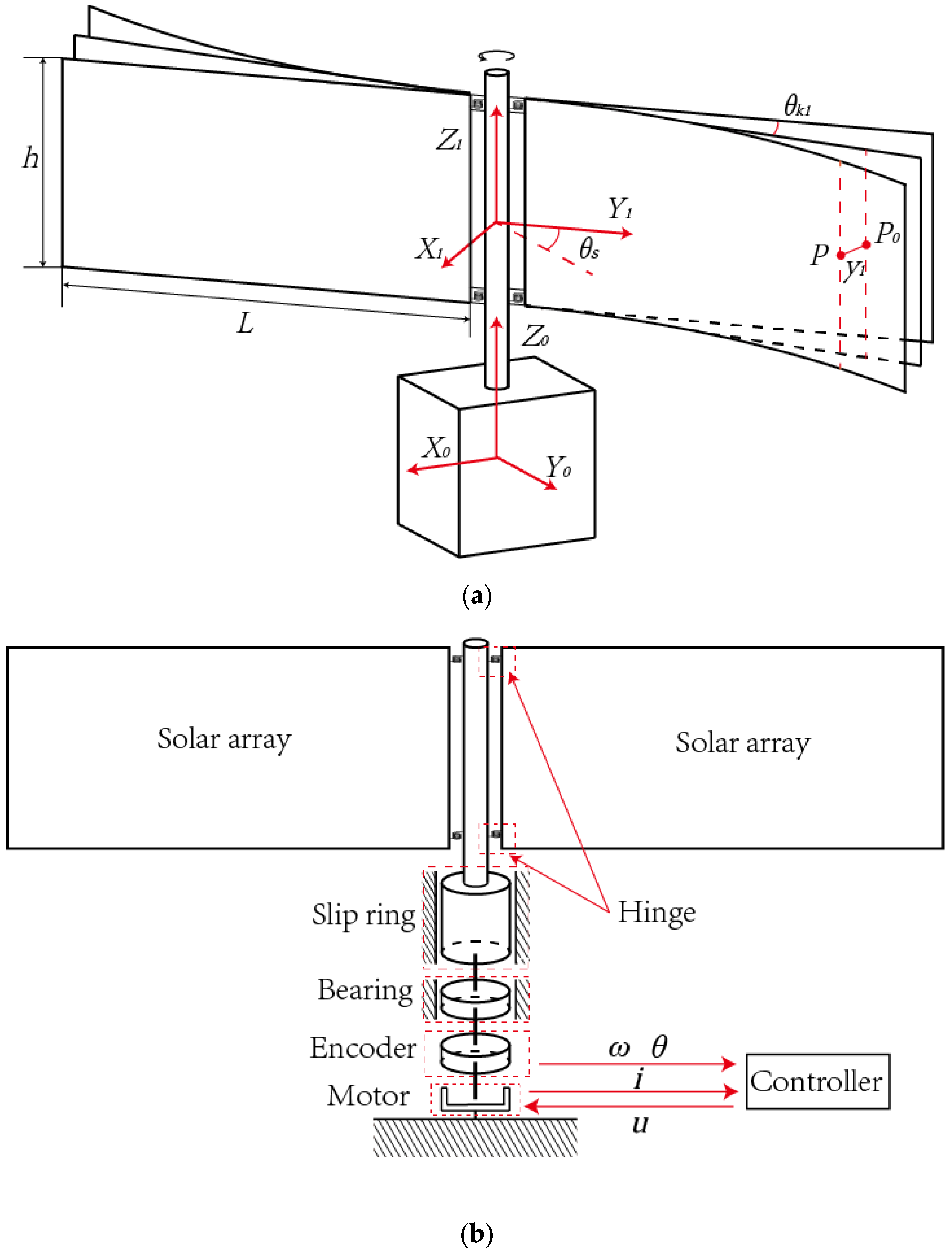
2.1. Descriptions and Assumptions for the Proposed Model
- Considering that the mass of the satellite is significantly larger than that of the solar array when the solar array is driven at a low speed, the central rigid body is regarded as a fixed reference body.
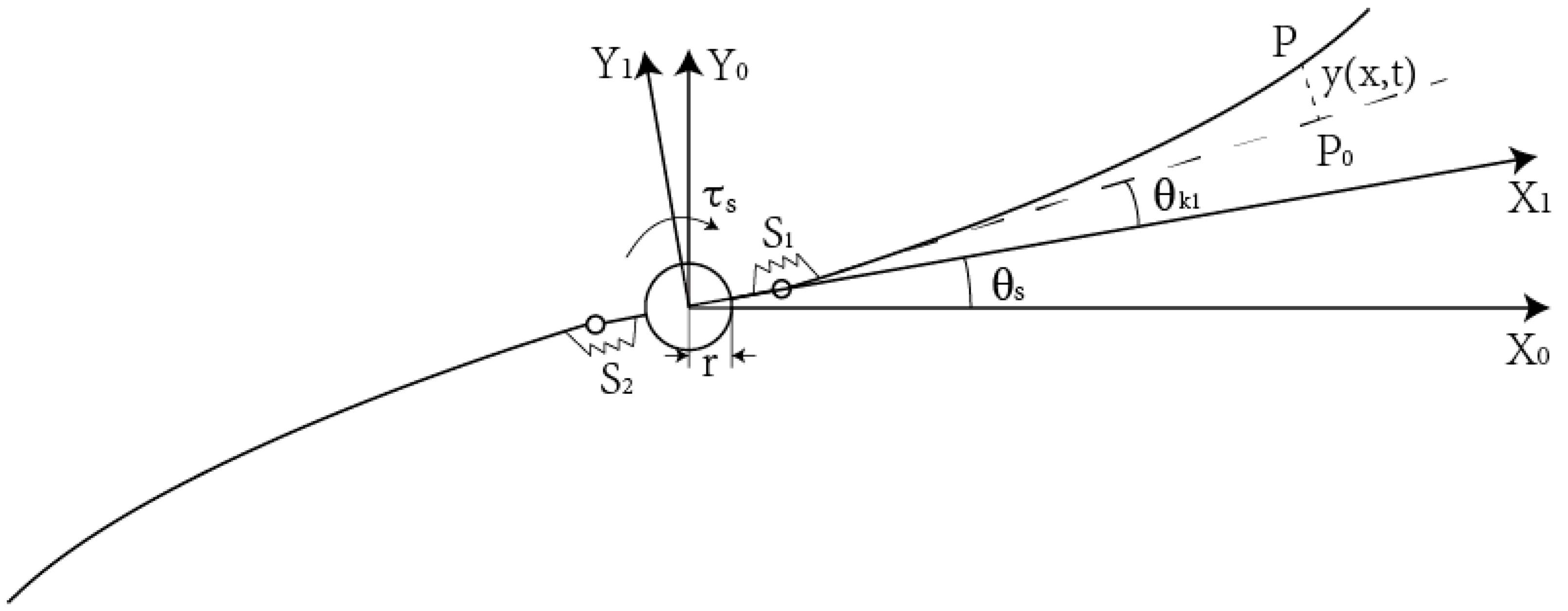
- The flexible hinge has been simplified as a hinge with an additional torsion spring, and the mass, size, damping, and friction of the torsion spring have been ignored. The solar arrays have been fully extended, and the hinge has been locked.
- The rotating shaft is regarded as a rigid body, and the ratio of the length to the width of the solar arrays is sufficiently large to ignore the effect of transverse shear when elastic displacement occurs. The solar array is applicable to the theoretical Euler–Bernoulli beam model.
- The permanent magnet in the motor is ideal and ignores the effects of magnetic saturation, hysteresis, and eddy currents. The motor’s magnetic circuit is linear, and the stator’s winding current generates only a sinusoidally distributed magnetic potential in the air gap, ignoring the high-order harmonic magnetic potential in the magnetic field.
2.2. Dynamic Model of the Load System
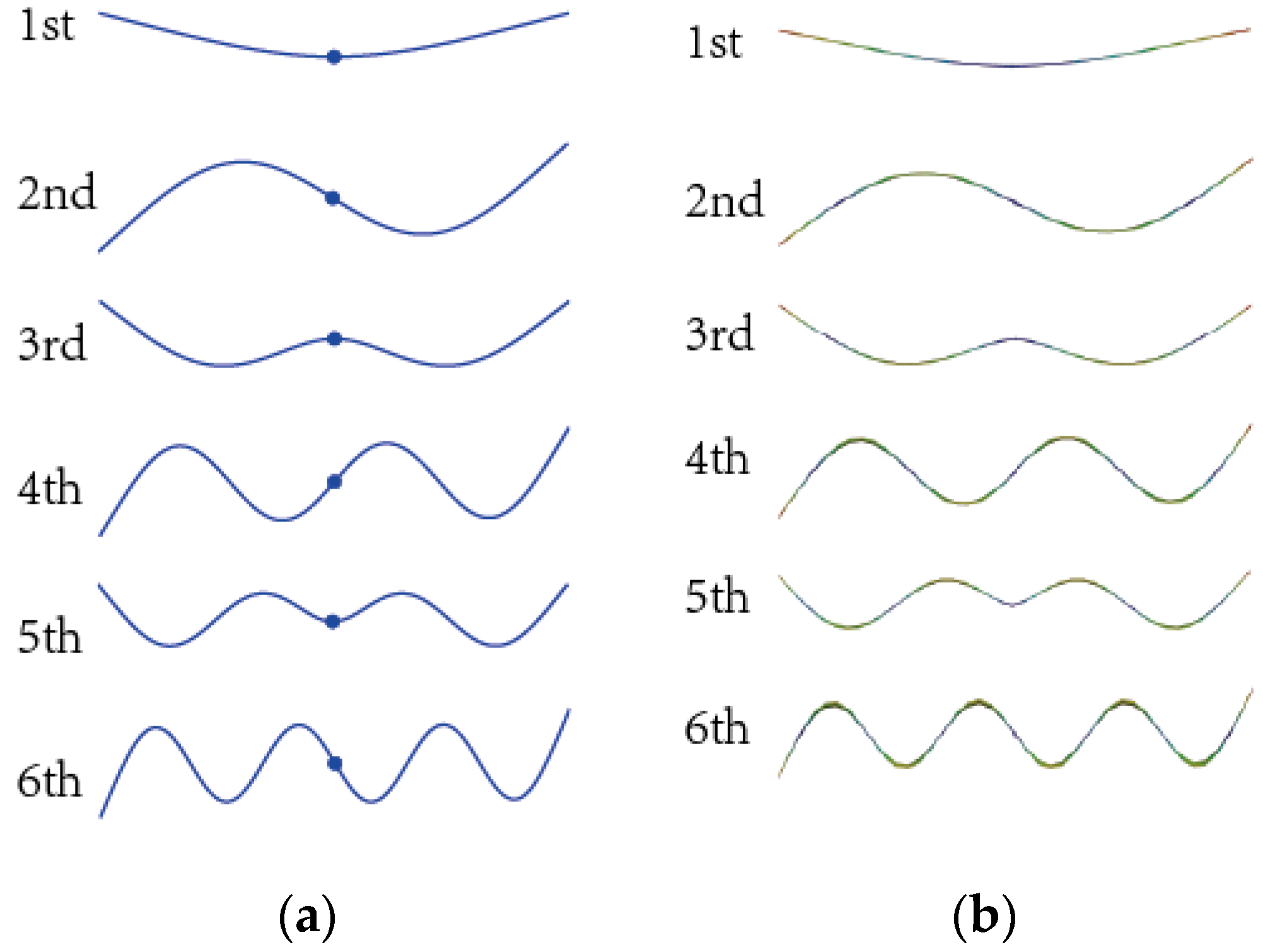
2.3. Discrete Dynamic Model of the System Based on Global Mode Method
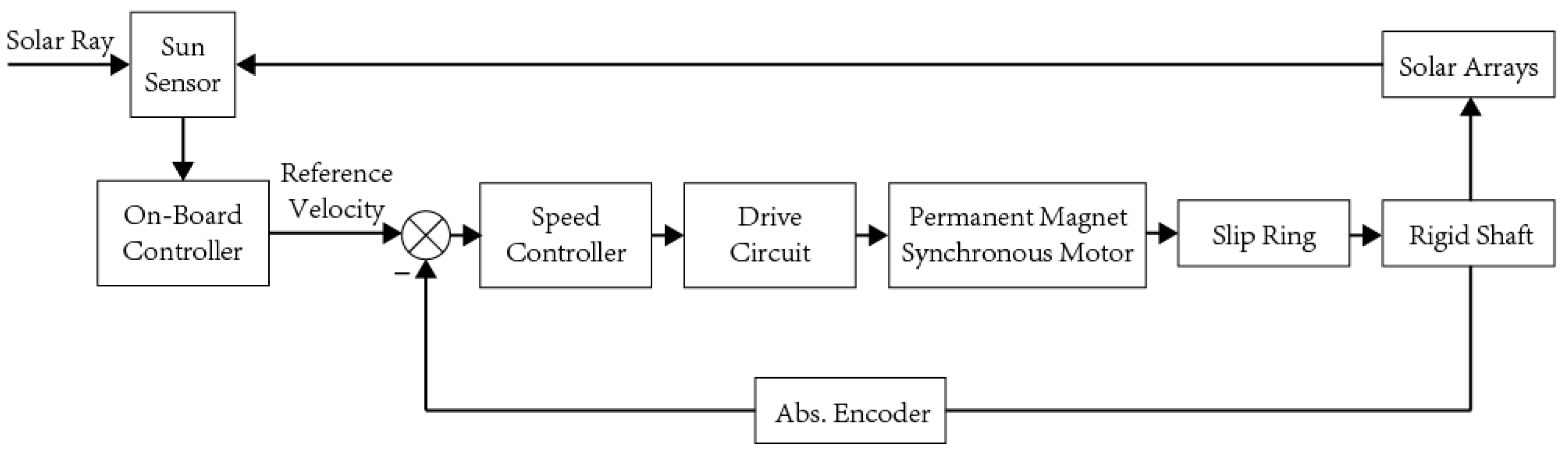
3. Model and Control Scheme of the Solar Array Drive Assembly
3.1. PMSM Model
3.2. Electromechanical Model of SADA
3.3. Design of the DCSMC with the ESO
3.4. Stability Proof
4. Numerical Results and Discussion
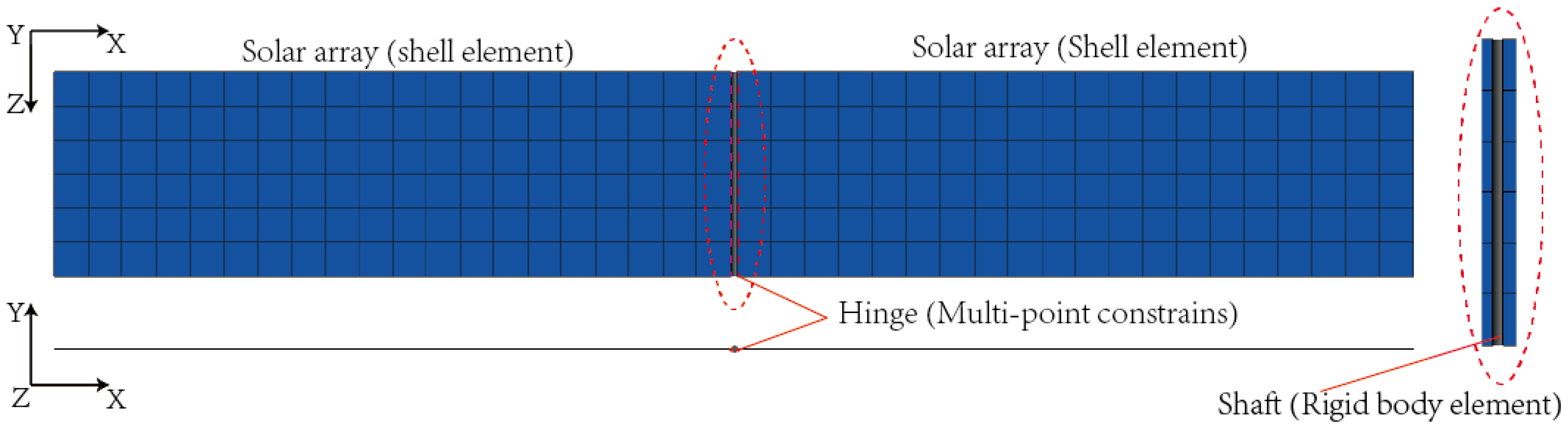
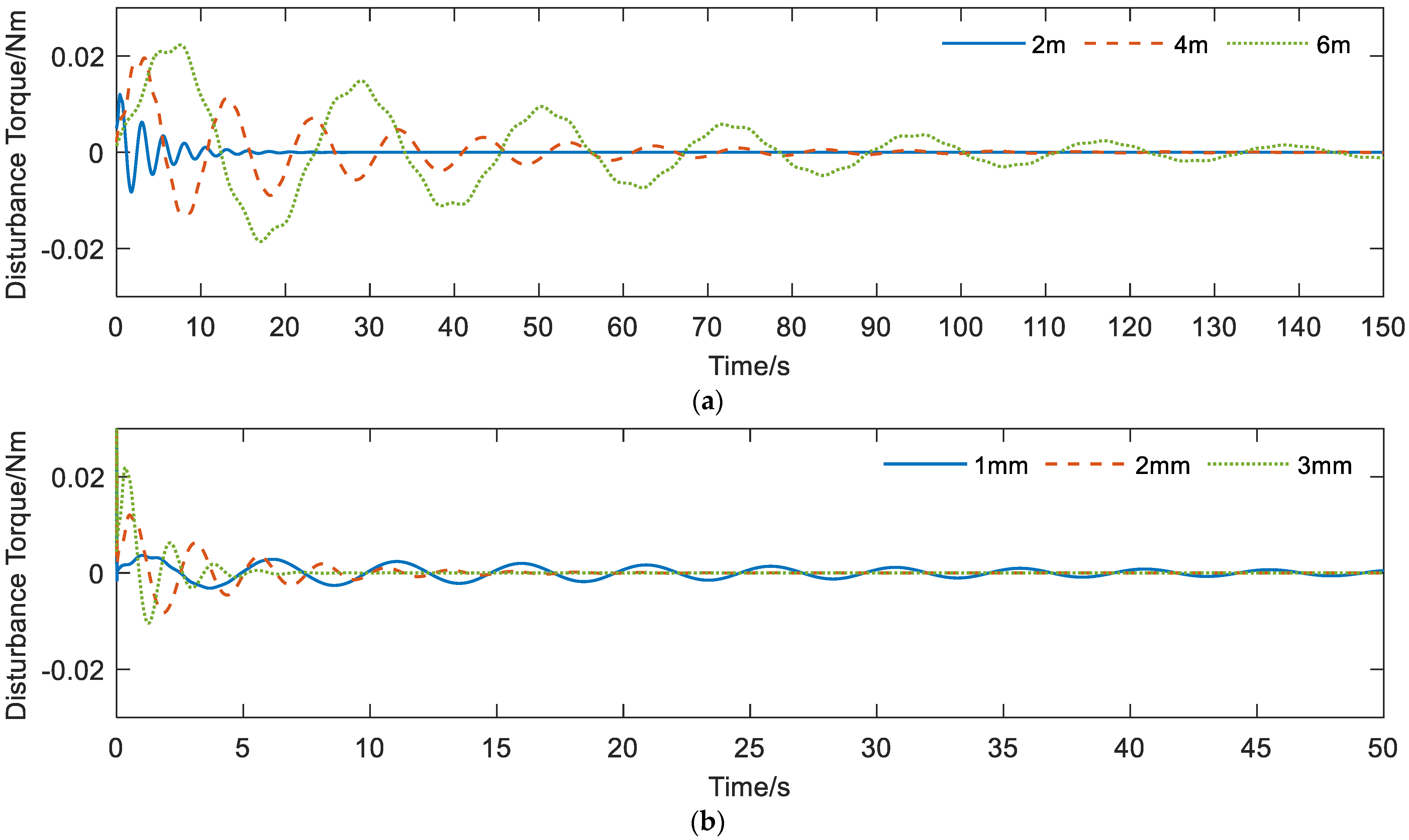
4.1. Validation of the Dynamic Model
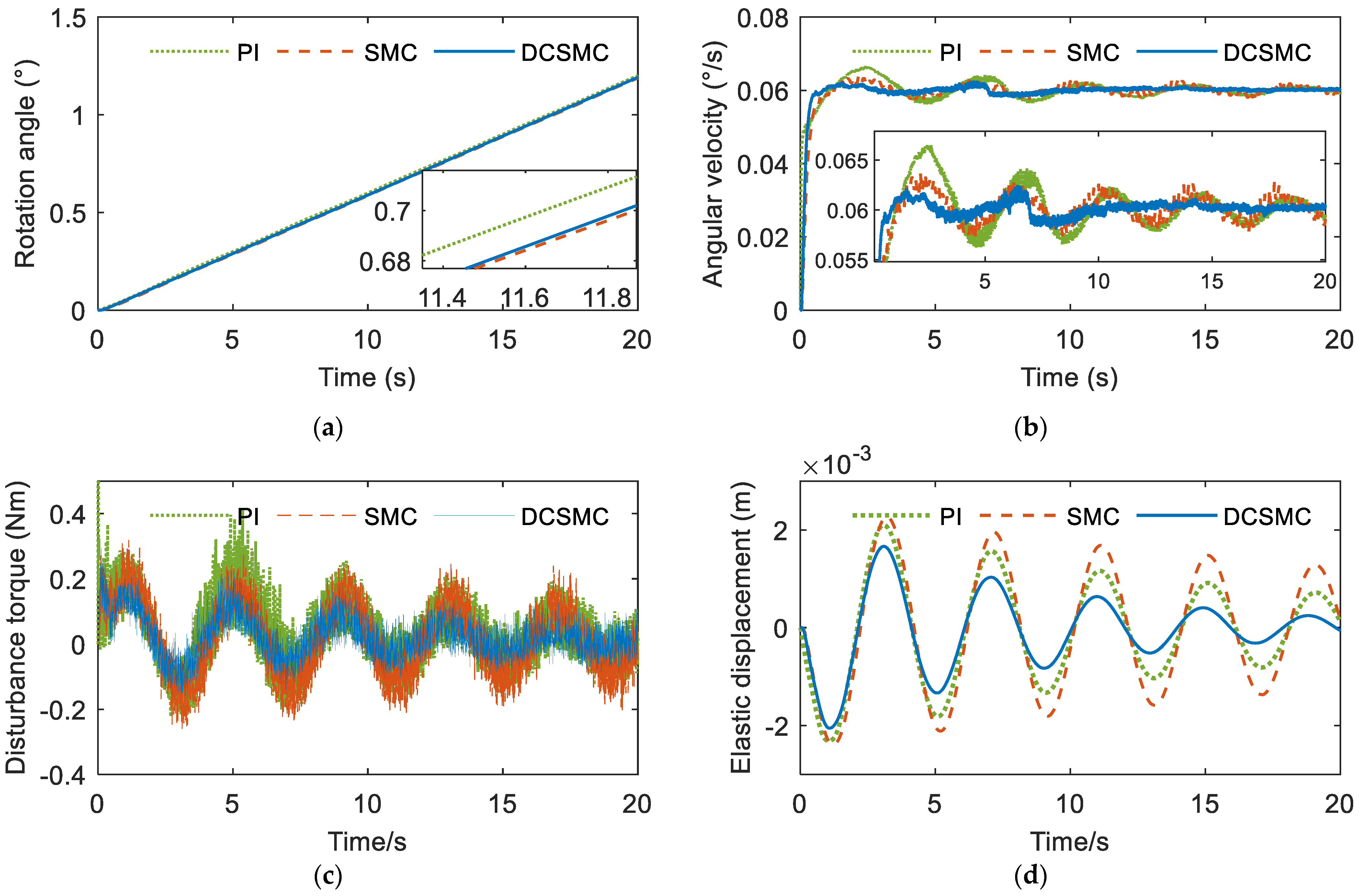
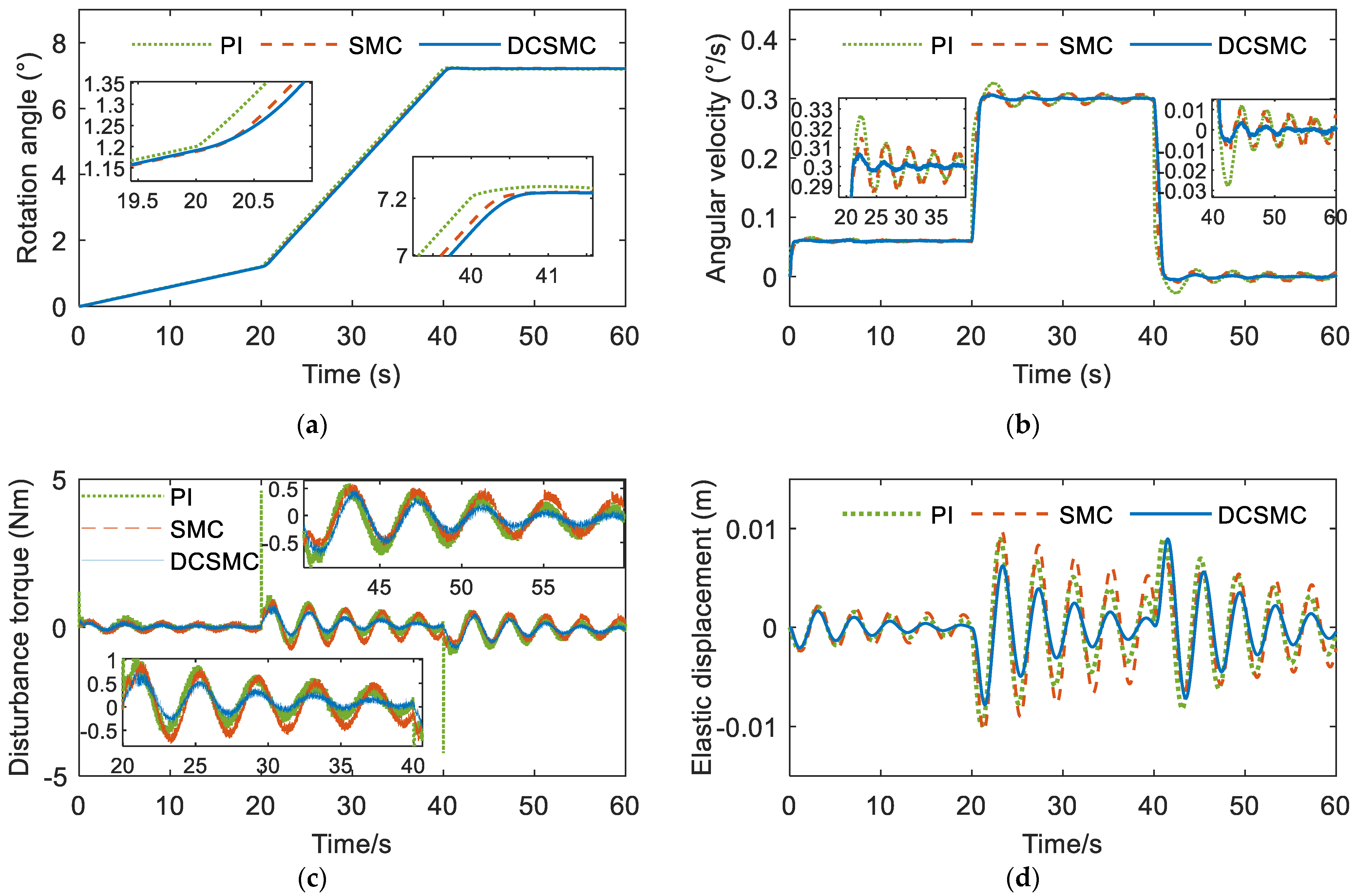
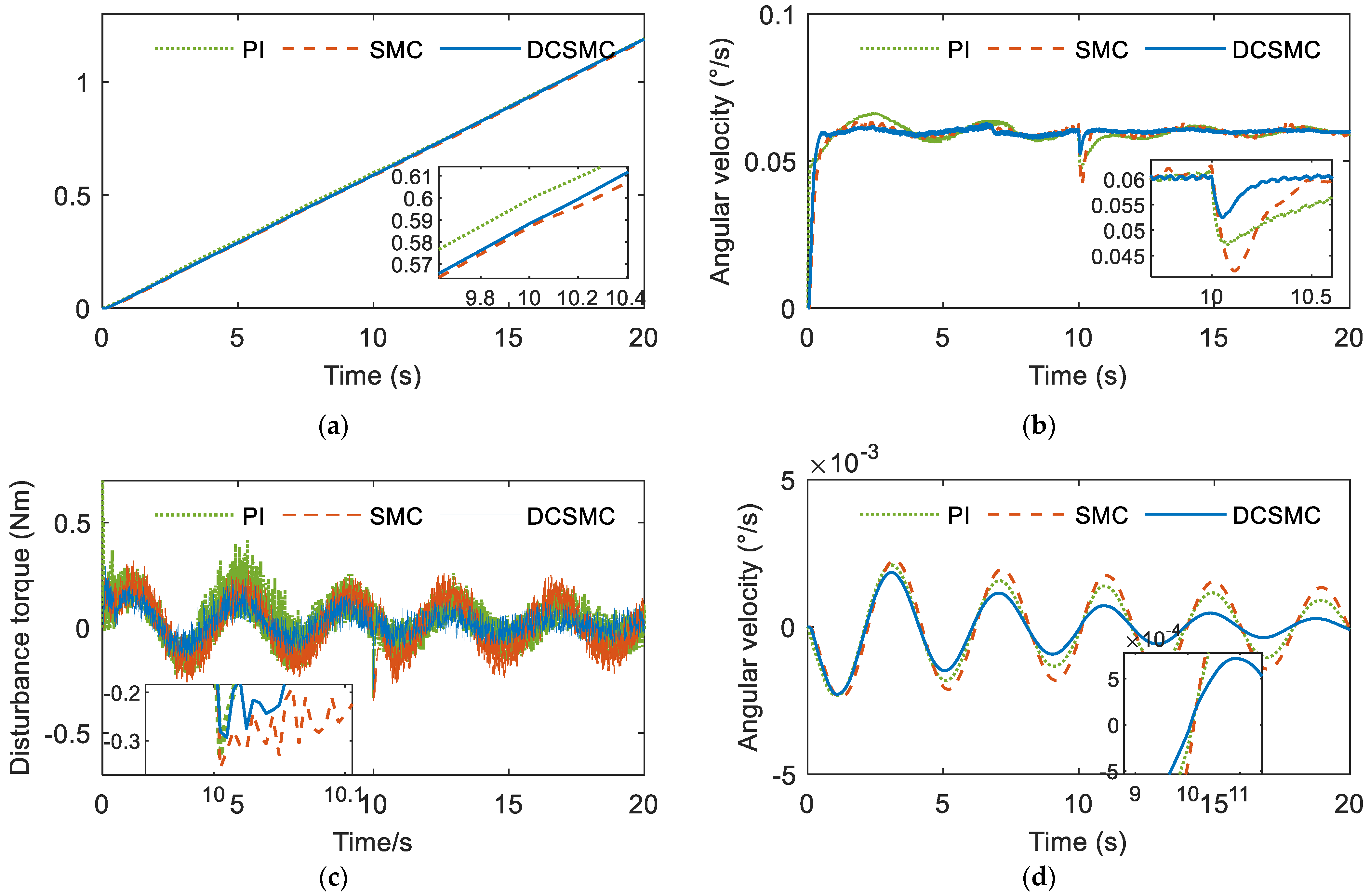
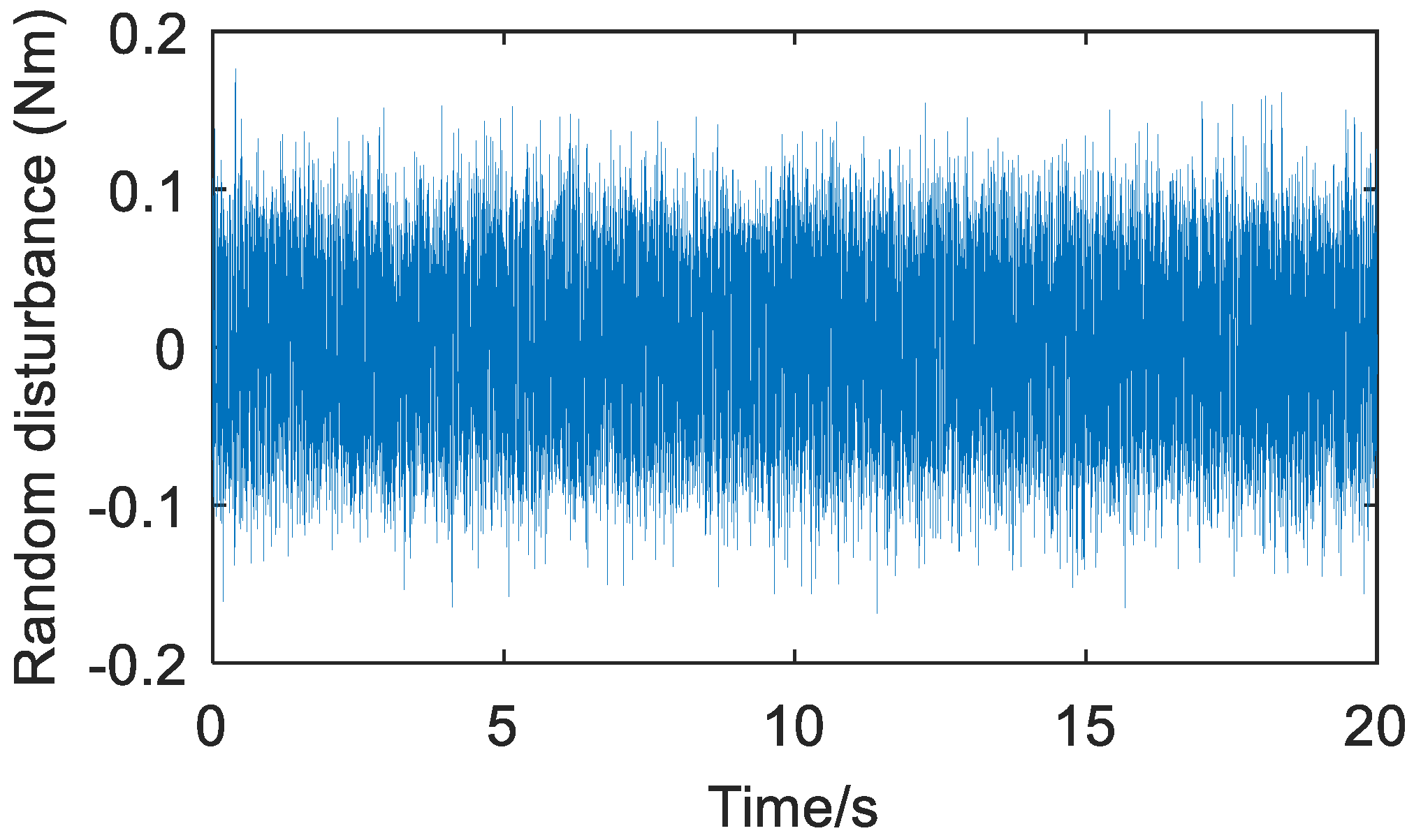
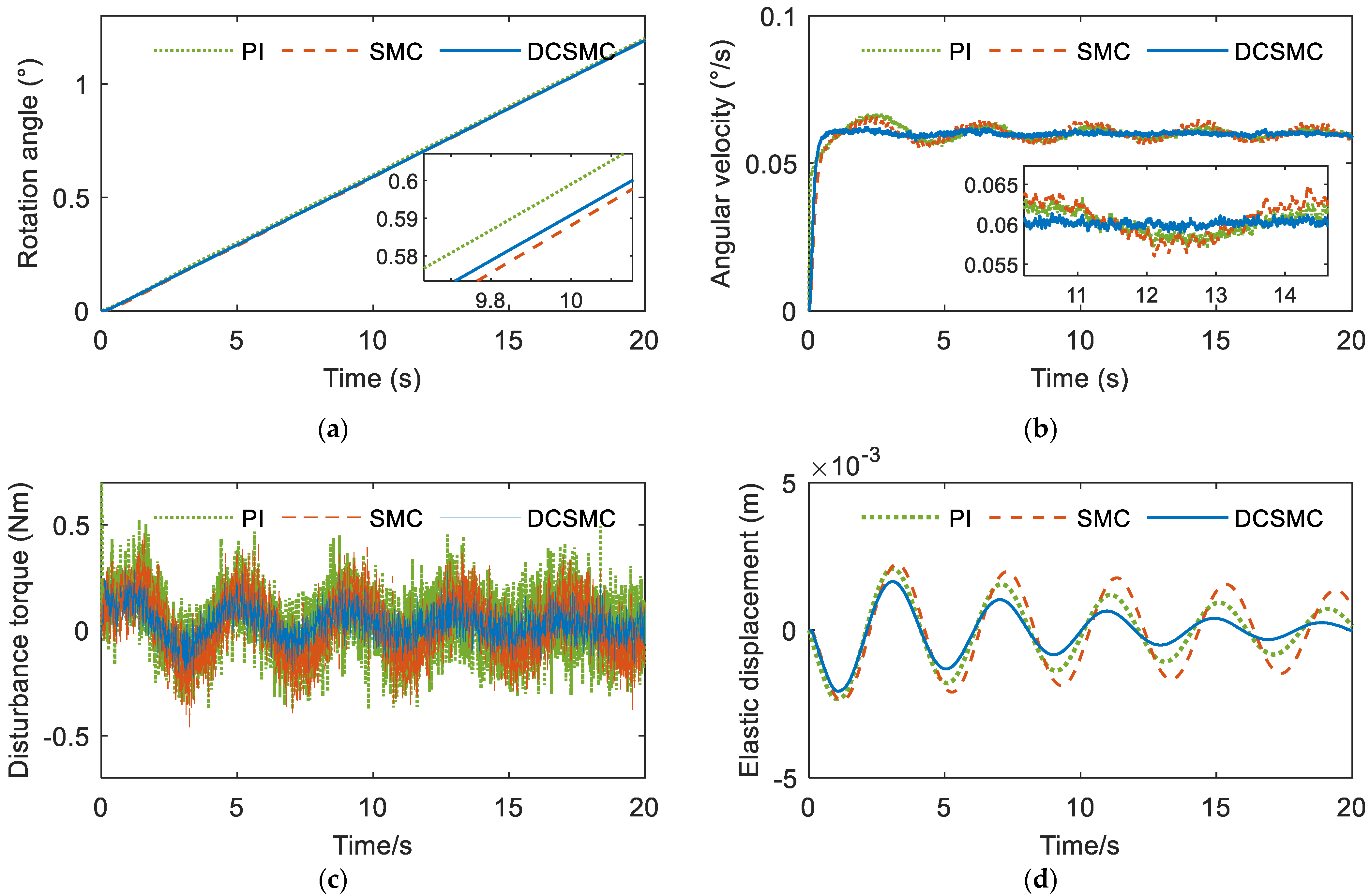
4.2. Numerical Simulation Results of the Driving Process
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Kristiansen, B.A.; Gravdahl, J.T.; Johansen, T.A. Energy optimal attitude control for a solar-powered spacecraft. Eur. J. Control 2021, 62, 192–197. [Google Scholar] [CrossRef]
- Colagrossi, A.; Lavagna, M. A Spacecraft Attitude Determination and Control Algorithm for Solar Arrays Pointing Leveraging Sun Angle and Angular Rates Measurements. Algorithms 2022, 15, 29. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, L.; Chen, D.C. Dynamic modelling and control of a rotating Euler–Bernoulli beam. J. Sound Vib. 2004, 274, 863–875. [Google Scholar] [CrossRef]
- Gasbarri, P.; Monti, R.; Sabatini, M. Very large space structures: Non-linear control and robustness to structural uncertainties. Acta Astronaut. 2014, 93, 252–265. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Tian, Q.; Hu, H.; Song, Y. Dynamics of a deployable mesh reflector of satellite antenna: Parallel computation and deployment simulation. J. Comput. Nonlinear Dyn. 2016, 11, 061005. [Google Scholar] [CrossRef]
- Gao, H.; He, W.; Song, Y.; Zhang, S.; Sun, C. Modeling and neural network control of a flexible beam with unknown spatiotemporally varying disturbance using assumed mode method. Neurocomputing 2018, 314, 458–467. [Google Scholar] [CrossRef]
- Celentano, L.; Coppola, A. A computationally efficient method for modeling flexible robots based on the assumed modes method. Appl. Math. Comput. 2011, 218, 4483–4493. [Google Scholar] [CrossRef]
- Kammer, D.C.; Allen, M.S.; Mayes, R.L. Formulation of a Craig-Bampton experimental substructure using a transmission simulator. In Proceedings of the Topics in Experimental Dynamic Substructuring, Volume 2: Proceedings of the 31st IMAC, a Conference on Structural Dynamics, 2013; Springer: Berlin/Heidelberg, Germany, 2014; pp. 321–331. [Google Scholar]
- Cao, D.; Song, M.; Zhu, W.; Tucker, R.; Wang, C.-T. Modeling and analysis of the in-plane vibration of a complex cable-stayed bridge. J. Sound Vib. 2012, 331, 5685–5714. [Google Scholar] [CrossRef]
- He, G.; Cao, D.; Cao, Y.; Huang, W. Dynamic modeling and orbit maneuvering response analysis for a three-axis attitude stabilized large scale flexible spacecraft installed with hinged solar arrays. Mech. Syst. Signal Process. 2022, 162, 108083. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, W.; Chen, J.; Feng, J.; Hu, W. Dynamic modeling and analytical global mode shapes of a folded beam-ring structure for a truss antenna reflector with two arms. Appl. Math. Model. 2022, 110, 542–561. [Google Scholar] [CrossRef]
- Wei, J.; Cao, D.; Liu, L.; Huang, W. Global mode method for dynamic modeling of a flexible-link flexible-joint manipulator with tip mass. Appl. Math. Model. 2017, 48, 787–805. [Google Scholar] [CrossRef]
- Cammarata, A. Global flexible modes for the model reduction of planar mechanisms using the finite-element floating frame of reference formulation. J. Sound Vib. 2020, 489, 115668. [Google Scholar] [CrossRef]
- Chen, J.; Cheng, W.; Li, M. Modeling, measurement and simulation of the disturbance torque generated via solar array drive assembly. Sci. China Technol. Sci. 2018, 61, 587–603. [Google Scholar] [CrossRef]
- Cao, Y.; Cao, D.; Wei, J.; Huang, W. Modeling for solar array drive assembly system and compensating for the rotating speed fluctuation. Aerosp. Sci. Technol. 2019, 84, 131–142. [Google Scholar] [CrossRef]
- Sattar, M.; Wei, C. Analysis of coupled torsional disturbance behavior of micro-stepped solar array drives. J. Sound Vib. 2019, 442, 572–597. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, S.; Zhao, L. Modeling and disturbance suppression for spacecraft solar array systems subject to drive fluctuation. Aerosp. Sci. Technol. 2021, 108, 106398. [Google Scholar] [CrossRef]
- Zhou, T.; Guo, H.; Xu, J.; Lin, C. Adaptive robust control with input shaping technology for solar array drive system. Acta Astronaut. 2017, 140, 264–272. [Google Scholar] [CrossRef]
- Guo, C.; Lu, D.; Zhang, M.; Zhang, Q.; Chen, C. Active control technology for flexible solar array disturbance suppression. Aerosp. Sci. Technol. 2020, 106, 106148. [Google Scholar] [CrossRef]
- Shi, T.; Wang, Z.; Xia, C. Speed measurement error suppression for PMSM control system using self-adaption Kalman observer. IEEE Trans. Ind. Electron. 2014, 62, 2753–2763. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2012, 28, 1358–1365. [Google Scholar] [CrossRef]
- Lai, C.-K.; Shyu, K.-K. A novel motor drive design for incremental motion system via sliding-mode control method. IEEE Trans. Ind. Electron. 2005, 52, 499–507. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, W.; Mu, C.; Liu, Y. Improved deadbeat predictive current control combined sliding mode strategy for PMSM drive system. IEEE Trans. Veh. Technol. 2017, 67, 251–263. [Google Scholar] [CrossRef]
- Rohith, G. Fractional power rate reaching law for augmented sliding mode performance. J. Frankl. Inst. 2021, 358, 856–876. [Google Scholar] [CrossRef]
- Guo, J. A novel high order sliding mode control method. ISA Trans. 2021, 111, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Hong, M.; Gu, X.; Liu, L.; Guo, Y. Finite time extended state observer based nonsingular fast terminal sliding mode control of flexible-joint manipulators with unknown disturbance. J. Frankl. Inst. 2023, 360, 18–37. [Google Scholar] [CrossRef]
- Yang, T.; Deng, Y.; Li, H.; Sun, Z.; Cao, H.; Wei, Z. Fast integral terminal sliding mode control with a novel disturbance observer based on iterative learning for speed control of PMSM. ISA Trans. 2023, 134, 460–471. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Liu, Y. Anti-disturbance speed control of low-speed high-torque PMSM based on second-order non-singular terminal sliding mode load observer. ISA Trans. 2019, 88, 142–152. [Google Scholar] [CrossRef]
- Xu, W.; Junejo, A.K.; Liu, Y.; Hussien, M.G.; Zhu, J. An efficient antidisturbance sliding-mode speed control method for PMSM drive systems. IEEE Trans. Power Electron. 2020, 36, 6879–6891. [Google Scholar] [CrossRef]
- Liu, L.; Cao, D.; Wei, J.; Tan, X.; Yu, T. Rigid-flexible coupling dynamic modeling and vibration control for a three-axis stabilized spacecraft. J. Vib. Acoust. 2017, 139, 041006. [Google Scholar] [CrossRef]
- Liu, L.; Cao, D. Dynamic modeling for a flexible spacecraft with solar arrays composed of honeycomb panels and its proportional–derivative control with input shaper. J. Dyn. Syst. Meas. Control 2016, 138, 081008. [Google Scholar] [CrossRef]
- Yu, Y.; Dai, L.; Chen, M.; Kong, L.; Wang, C.; Li, G.; Xue, Z. System identification and mechanical resonance frequency suppression for servo control used in single gimbal control moment gyroscope. PLoS ONE 2022, 17, e0267450. [Google Scholar] [CrossRef]
- Yu, Y.; Dai, L.; Chen, M.-S.; Kong, L.-B.; Wang, C.-Q.; Xue, Z.-P. Calibration, compensation and accuracy analysis of circular grating used in single gimbal control moment gyroscope. Sensors 2020, 20, 1458. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2011, 59, 1171–1183. [Google Scholar] [CrossRef]
- Miklosovic, R.; Gao, Z. A robust two-degree-of-freedom control design technique and its practical application. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; pp. 1495–1502. [Google Scholar]
- Chen, Y.-P.; Lo, S.-C. Sliding-mode controller design for spacecraft attitude tracking maneuvers. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 1328–1333. [Google Scholar] [CrossRef]
- LIM, T.; COOPER, P.; AYERS, J. Structural dynamic interaction with solar tracking control for evolutionary Space Station concepts. In Proceedings of the 33rd Structures, Structural Dynamics and Materials Conference, Dallas, TX, USA, 13–15 April 1992; p. 2461. [Google Scholar]
- Wang, A.; Jia, X.; Dong, S. A new exponential reaching law of sliding mode control to improve performance of permanent magnet synchronous motor. IEEE Trans. Magn. 2013, 49, 2409–2412. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Parameters | Values |
|---|---|---|
| Solar arrays | Length (m) | 4.0 |
| Width (m) | 0.3 | |
| Thickness of solar array (m) | 0.01 | |
| Elastic modulus of aluminum | 7 × 1010 | |
| Mass density of aluminum (kg m−3) | 2700 | |
| Poisson ratio μ | 0.33 | |
| Hinge | Torsional rigidity (Nm/rad) | 400 |
| Rigid shaft | Radius (m) | 0.01 |
| Modal Order * | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | |
| 1 | 1.941 | 1.971 | −1.55% | 0.504 | 0.509 | −0.99% | 0.124 | 0.126 | −1.61% |
| 2 | 9.038 | 9.029 | 0.10% | 2.25 | 2.233 | 0.76% | 0.556 | 0.557 | −0.18% |
| 3 | 12.479 | 12.72 | −1.93% | 3.169 | 3.192 | −0.73% | 0.778 | 0.788 | −1.29% |
| 4 | 29.82 | 29.448 | 1.25% | 7.369 | 7.254 | 1.56% | 1.822 | 1.805 | 0.93% |
| 5 | 35.524 | 34.978 | 1.54% | 8.965 | 8.924 | 0.46% | 2.129 | 2.104 | 1.17% |
| 6 | 63.212 | 62.774 | 0.69% | 15.629 | 15.34 | 1.85% | 3.829 | 3.776 | 1.38% |
| Modal Order * | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | |
| 1 | 0.124 | 0.126 | −1.61% | 0.124 | 0.126 | −1.61% | 0.124 | 0.126 | −1.61% |
| 2 | 0.556 | 0.557 | −0.18% | 0.556 | 0.557 | −0.18% | 0.556 | 0.557 | −0.18% |
| 3 | 0.778 | 0.788 | −1.29% | 0.778 | 0.788 | −1.29% | 0.778 | 0.788 | −1.29% |
| 4 | 1.822 | 1.805 | 0.93% | 1.822 | 1.805 | 0.93% | 1.822 | 1.805 | 0.93% |
| 5 | 2.129 | 2.104 | 1.17% | 2.129 | 2.104 | 1.17% | 2.129 | 2.104 | 1.17% |
| 6 | 3.829 | 3.776 | 1.38% | 3.829 | 3.776 | 1.38% | 3.829 | 3.776 | 1.38% |
| Modal Order * | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | Ansys | GMM | Re (%) | |
| 1 | 1.868 | 1.859 | 0.48% | 2.058 | 2.071 | −0.63% | 2.081 | 2.101 | −0.96% |
| 2 | 9.038 | 9.029 | 0.10% | 9.038 | 9.029 | 0.10% | 9.038 | 9.029 | 0.10% |
| 3 | 11.889 | 12.014 | −1.05% | 12.935 | 13.026 | −0.70% | 13.076 | 13.165 | −0.68% |
| 4 | 29.82 | 29.448 | 1.25% | 29.82 | 29.448 | 1.25% | 29.82 | 29.448 | 1.25% |
| 5 | 33.993 | 33.773 | 0.65% | 36.741 | 36.174 | 1.54% | 37.149 | 36.864 | 0.77% |
| 6 | 63.212 | 62.774 | 0.69% | 63.212 | 62.774 | 0.69% | 63.212 | 62.774 | 0.69% |
| Controller | Parameters | Values |
|---|---|---|
| PI control | Proportional coefficient (Speed loop) | 2 |
| Integral coefficient (Speed loop) | 20 | |
| Proportional coefficient (Current loop) | 20 | |
| Integral coefficient | 20 | |
| (Current loop) | ||
| SMC | 2 | |
| 2.5 | ||
| 2.8 | ||
| DCSMC | 0.45 | |
| 0.65 | ||
| 20 | ||
| 5 | ||
| 23 | ||
| 160 | ||
| 160 | ||
| 0.94 |
| Parameters | Values |
|---|---|
| Pole pairs | 32 |
| Flux linkage () | 0.0625 |
| Inductance of -axis () | 5 |
| Inductance of -axis () | 5 |
| Armature resistance () | 2.25 |
| Bus voltage () | 28 |
| Rotor inertia () | 0.01 |
| Maximum output torque () | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Jia, H.; Chen, M.-S.; Kong, L.-B.; Hu, H.; Guo, L. Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System. Aerospace 2023, 10, 501. https://doi.org/10.3390/aerospace10060501
Liang J, Jia H, Chen M-S, Kong L-B, Hu H, Guo L. Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System. Aerospace. 2023; 10(6):501. https://doi.org/10.3390/aerospace10060501
Chicago/Turabian StyleLiang, Ji, Hongguang Jia, Mao-Sheng Chen, Ling-Bo Kong, Huiying Hu, and Lihong Guo. 2023. "Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System" Aerospace 10, no. 6: 501. https://doi.org/10.3390/aerospace10060501
APA StyleLiang, J., Jia, H., Chen, M. -S., Kong, L. -B., Hu, H., & Guo, L. (2023). Modeling and Disturbance Compensation Sliding Mode Control for Solar Array Drive Assembly System. Aerospace, 10(6), 501. https://doi.org/10.3390/aerospace10060501