2.1. Optimization Method
In general, let
,
or
, be a domain with Lipschitz boundary
, and
y be a physical state defined on
. In the context of the application studied in this paper, we consider
to be the union of an inlet (
), outlet (
), and wall (
) boundary, that is
. We consider shape optimization problems of the general form
where
denotes the PDE constraints on the state
y, which in our case correspond to the Navier–Stokes equations and
is a shape function. We assume that the state is unique on
, and thus the control to state mapping
exists [
22]. Therewith we obtain the reduced objective function
and in order to compute shape sensitivities for
the domain has to be made variable. We follow the standard ansatz with a perturbation of the identity
where the descent direction is given by the vector field
with
, cf. [
23] (Section 2.8) and [
24] (Chapter 2, Section 2.6). Then the transformed domain reads
With a suitable displacement field
u and a sufficiently small step size
, the perturbation of the identity is invertible with bounded inverse [
23]. The shape derivative of the reduced cost function
is denoted by
and fulfills the approximation condition [
25]
In the following, we describe methods of how to obtain a descent direction
u such that
holds.
2.2. Descent Approaches to Simultaneously Update the Mesh and the Shape
First we consider a Steklov-Poincaré-type method which has been introduced in [
26]. Therein the descent direction is obtained by solving a linear elasticity-like problem from structural mechanics where the shape sensitivity enters as right hand side as forcing term. The method is similar to the
Hilbertian extension and regularization in [
27] and [
28] (Section 5.2). In a Hilbert space setting the gradient of
gives a descent direction. Consider the Hilbert space
H with the inner product
. Then we obtain a descent direction
defined as the solution of the variational form
Of course, the direction depends on the choice of
. The Hilbert space approach leads to regular vector fields which are defined on the whole computational domain. However, the obtained transformations might not give ’good’ deformations of the internal mesh; that is, the resulting displacement fields do not sufficiently preserve mesh quality, regarding e.g., changes to the level of orthogonality or the aspect ratio. This is only a technical issue but it has a significant influence on the implementation and algorithmic realization of the approach. We therefore suggest to compute a
p-harmonic domain extension of the resulting shape deformations by solving a non-linear elliptic equation containing the
p-Laplace operator. This second approach builds on the idea proposed in [
21] where the extension of the boundary deformation is extended via a non-linear convection diffusion problem into the domain. Here, we compute a descent direction and the domain extension in a two step process. First, the shape gradient is given by the solution of (
5), and second, the movement of the discrete nodes within the domain is given by the solution of the Dirichlet problem
for
in a weak sense. Because the solution of (
5) enters as Dirichlet data, the shape itself still is deformed by
and only the internal nodes of the mesh are affected. For the inner product in (
5) we consider
with the diffusivity [
9]
For now, we neglect the fact that in general
when considering (
5) with the inner product (
7). However, the obtained solutions give regular deformations and are applicable for practical use. In [
15], this method is associated with applying the Dirichelt-to-Neumann map or Steklov–Poincaré operator for the case in which
has a boundary formulation of the form
where
depends on the state and the adjoint state and thus it is specific to the problem. Note that the formulation in (
5) is rather general and does not necessarily require the boundary formulation of the shape derivative.
Third, we consider the
p-Laplace relaxation of the steepest descent direction in
-topology [
16,
17]. The direction of steepest descent in
is defined by
where
is the operator (spectral) norm. Following [
29] (Proposition 5.1 and 5.3) the minimizer of
tends to the solution of (
10) for
and thus the desired direction of steepest descent. The approximation is obtained by solving the boundary value problem
In practice, this means that we are interested in solutions of (
11) for
p as large as possible. This involves at least two difficulties for the practical application. On the one hand, the numerical computation of solutions of (
11) requires higher computational effort the higher the value of
p is [
30,
31]. On the other hand, the order of integrability
p depends on the spatial dimension; that is,
has to be fulfilled, which directly follows from the Sobolev imbedding theorem [
32] (Theorem 4.12). Additionally, when considering a second order method for solving (
11) the second derivative of
does not exist where
for
, regardless of the spatial dimension. Thus a solution strategy as described in [
33] may be considered.
The shape optimization procedure is summarized in Algorithm 1, where we follow a standard approach via the Lagrange multiplier rule.
| Algorithm 1 Shape Optimization Procedure |
- 1:
- 2:
- 3:
repeat - 4:
Compute state - 5:
Compute adjoint variables - 6:
Compute descent direction such that - 7:
Choose such that - 8:
Set - 9:
- 10:
until
|
In a first step, the state
y is computed by solving the underlying boundary value problem which, in the present study, is given by the steady-state Navier–Stokes (
16) below. In a second step the adjoint state
is computed which is associated with the Lagrange multipliers and given by the solution of the adjoint equations in (
19). For the shape derivative
we consider the boundary formulation (
9) from which the descent direction
u is obtained by applying one of the three different strategies. The process to determine the modified shape deformation with
p-Laplace extension is summarized in Algorithm 2.
A full non-linear approach is to solve the
p-Laplace problem, that is, to solve (
12). Algorithm 3 schematically illustrates the realization of this approach.
A rigorous comparison of the descent direction influence on the shape optimization procedure would require the determination of an optimal step size for each direction. However, the identification of the optimal step size is computationally demanding when the state is defined by the solution of a PDE, and thus this might be unfeasible. Nevertheless, we control the sequence of successive shape updates
k by applying
where
is chosen such that the
Armijo condition is fulfilled.
| Algorithm 2 Steklov–Poincaré with p-Laplace domain extension (SP+p) |
Require: , , , - 1:
Compute the boundary deformation u according to ( 5) - 2:
▷ Use the solution from 5 as initial guess. - 3:
- 4:
repeat - 5:
if then - 6:
- 7:
else - 8:
▷ Where - 9:
end if - 10:
Compute the dom. extension according to ( 6) with initial guess and tolerance . - 11:
- 12:
▷ Set the initial guess for the next p. - 13:
until
- 14:
▷ Set the deformation for the whole domain.
|
| Algorithm 3 p-Laplace relaxed steepest descent direction |
Require: , , , - 1:
- 2:
- 3:
repeat - 4:
if then - 5:
- 6:
else - 7:
▷ Where - 8:
end if - 9:
Compute the deformation field according to ( 12), initial guess and tolerance . - 10:
- 11:
▷ Set the initial guess for the next p. - 12:
until
|
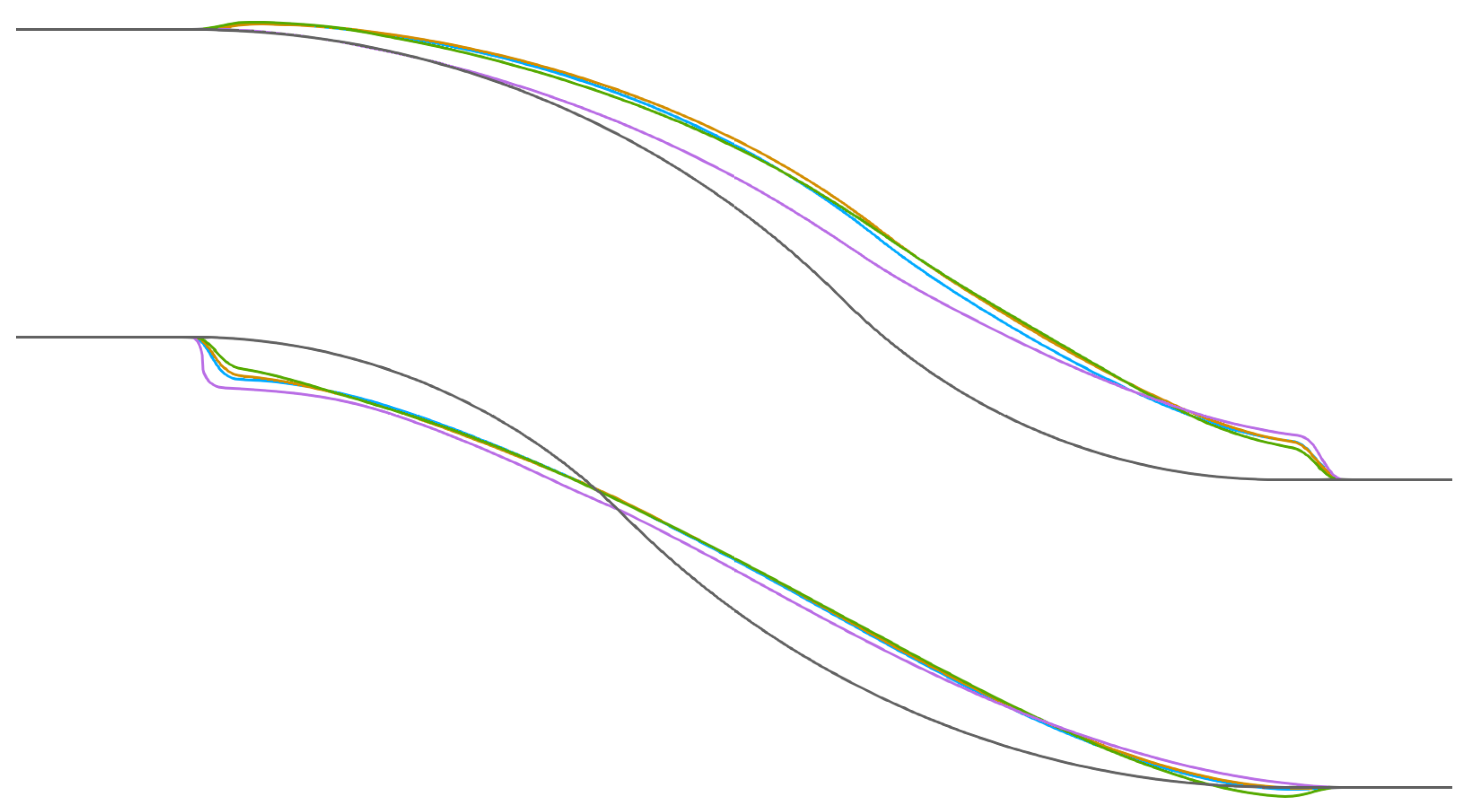
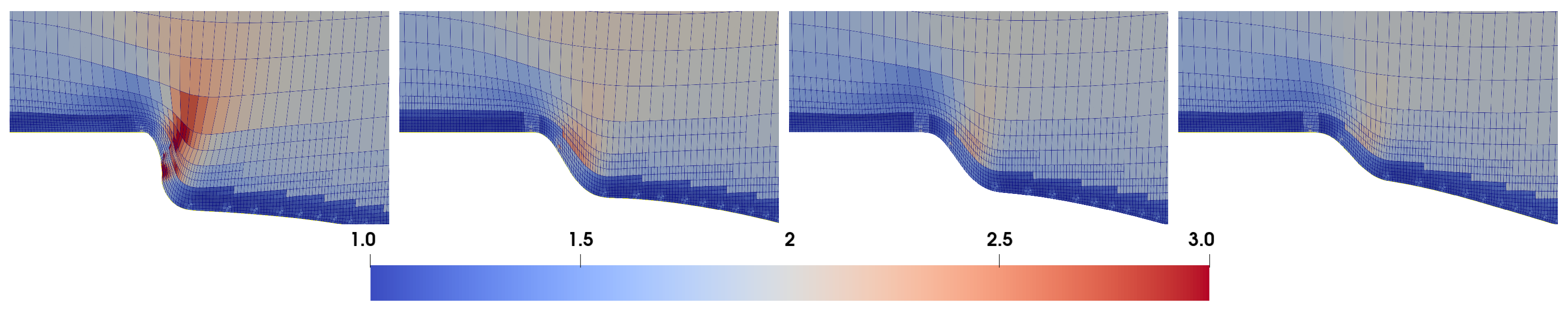
Furthermore, an additional issue that one might face in CAD-free shape optimization relates to the construction of the problem. In general but most frequently in internal flow shape optimization problems, such as the ones studied in this paper, we are interested in optimizing a certain Section of the wall, namely
. We thus define
as the union of the non-intersecting sets of design and non-design (bound to their initial configuration) points, respectively. The construction of the optimization problem results in a change of the boundary condition of
u in
. A common problem that might arise, is that the sudden change of boundary conditions and displacement leads to distorted computational grids, as shown in
Figure 1 (right). To ensure compatibility, we apply a filtering approach in a close neighborhood around the connection of
and
, that reads
where
controls the filtering radius with
For the application studied herein,
corresponds to the position vector of a node connecting
and
.
Figure 1 schematically shows the impact of the filter for the same 2D case. As shown in
Figure 1 (left), the optimizer has managed to update the shape while maintaining its grid quality. In contrast, when the solution
u is directly applied, the grid quality is rapidly deteriorated, leading to even intersecting faces as shown in
Figure 1 (right), making the numerical solution of the PDE constraints unfeasible.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}