
Micro- and Nanosatellite Sensorless Electromagnetic Docking Control Based on the High-Frequency Injection Method


Abstract
:1. Introduction
2. Sensorless Distance Estimation Method
2.1. Voltage Equation Transformation
2.2. Estimation Method Based on PF Characteristic
2.3. Estimation Method Based on AF Characteristic
3. Actuator Mechanism
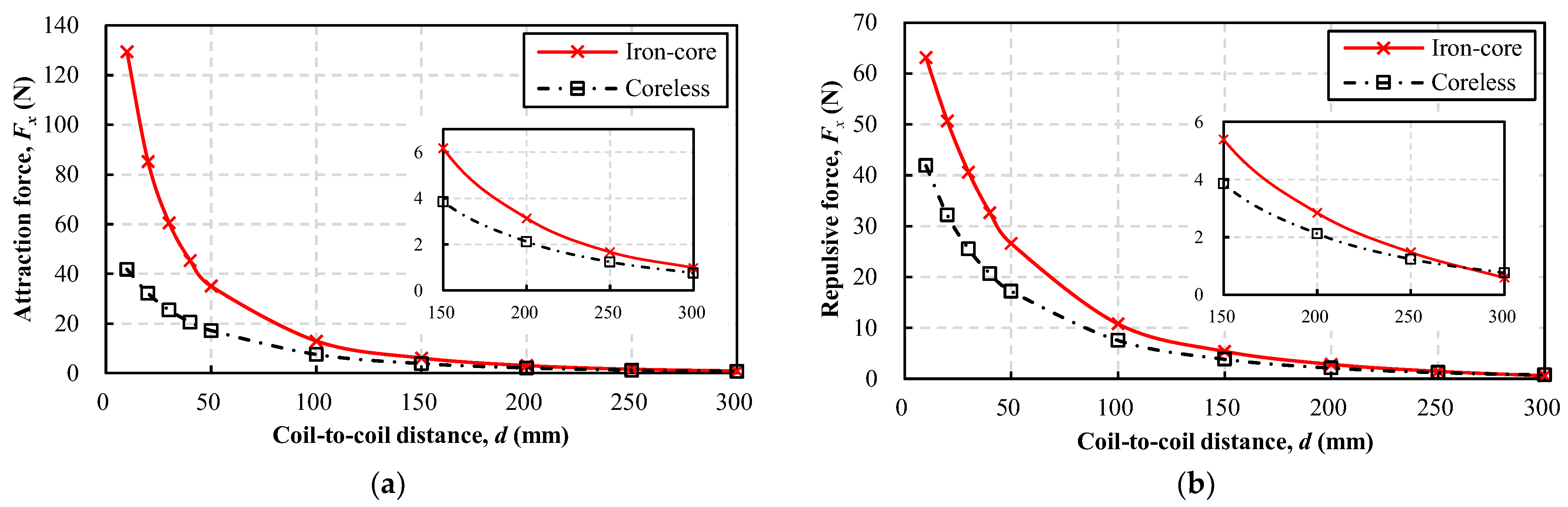
3.1. Electromagnet
3.2. Docking Port
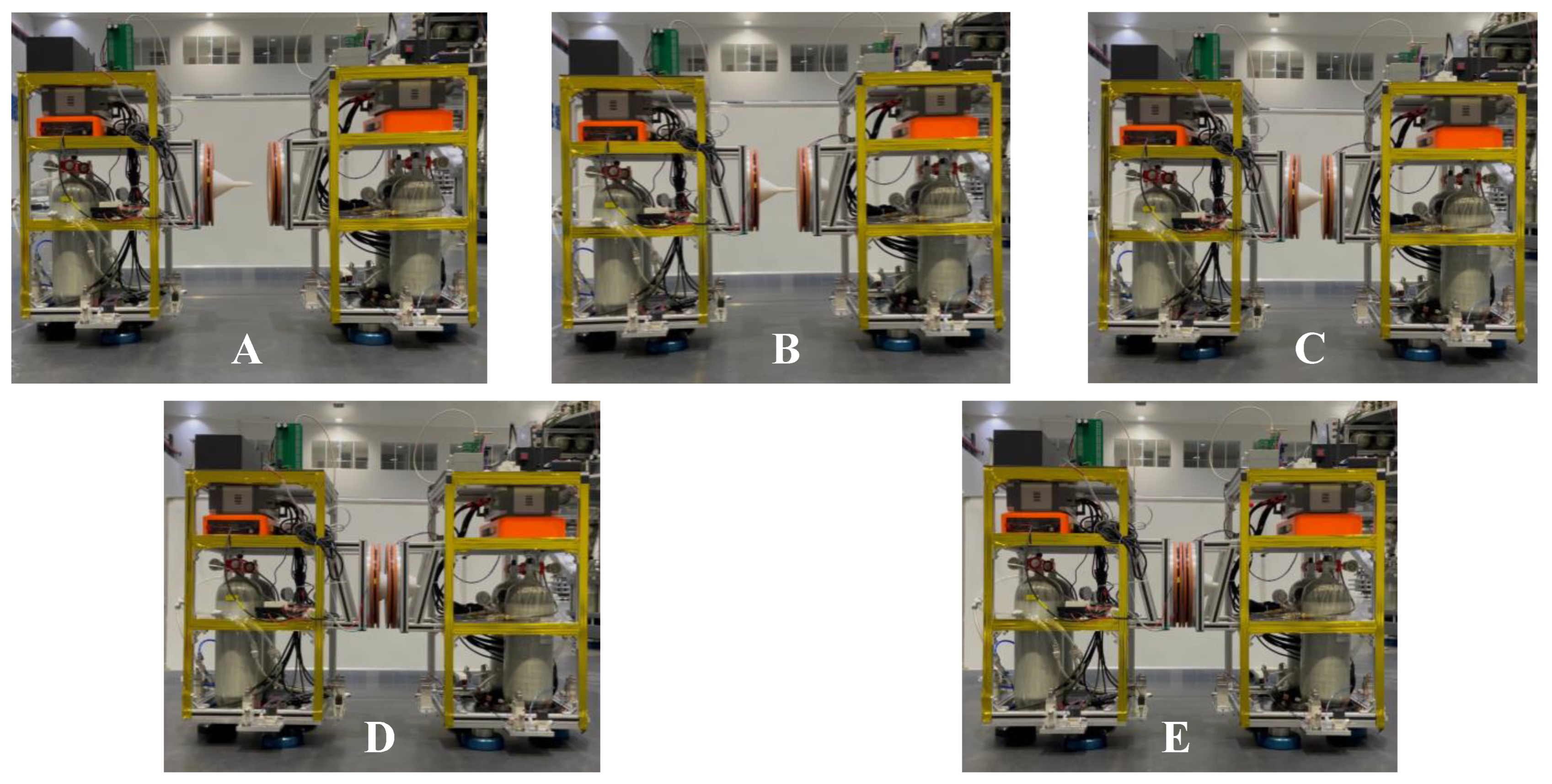
- Non-touching Docking Stage. The two satellites are not in contact during this stage, and they are brought closer from a distance at a limited speed.
- Aligning Stage. At this stage, the front end of the taper rod enters the enveloping cone of the taper hole for the first time. If there is a large misalignment, the taper rod will lightly collide with the surface of the taper hole and be ejected. The electromagnetic docking control system then pulls the two satellites closer again, and the misalignment and the heading error continue to be reduced. The process of collision and pulling will be repeated several times until the front end of the taper rod passes through the funnel mouth of the rod hole, at which point the two satellites are basically aligned. Note that there is no active orientation using an actuator such as a momentum wheel, and the aligning is passively accomplished by attraction force.
- Touching Docking Stage. When the front end crosses through the funnel mouth, the chaser will not escape, and the two satellites will continue to be smoothly pulled closer. At this time, there will be a small friction due to the contact between the taper rod and the taper hole.
- Locking Stage. At this stage, the docking process is completed, and finally, a large attraction force is output using the electromagnets to squeeze the locking mechanism so that the two satellites are locked and fixed.
4. Control Strategy
4.1. Task Allocation
4.2. Frequency and Amplitude of the Injected Voltage
4.3. RMS Calculation
4.4. k-d Curve
4.5. Control Loop
4.6. Electromagnetic Force Output Linearization
4.7. Filter Parameters
4.8. Trajectory Planner
4.9. Control Block Diagram
5. Experimental Results
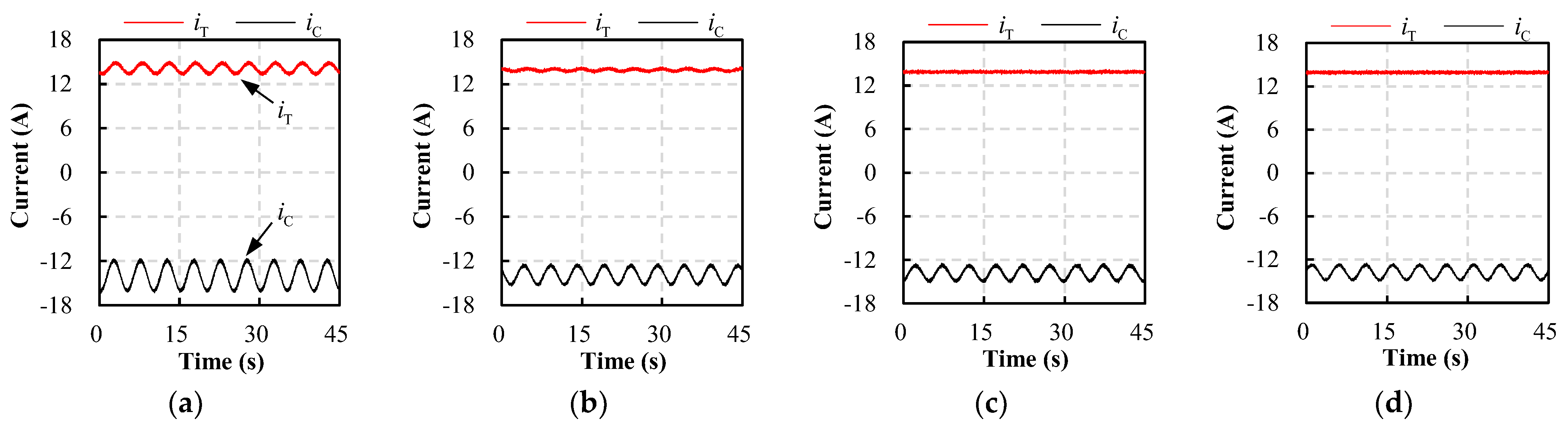
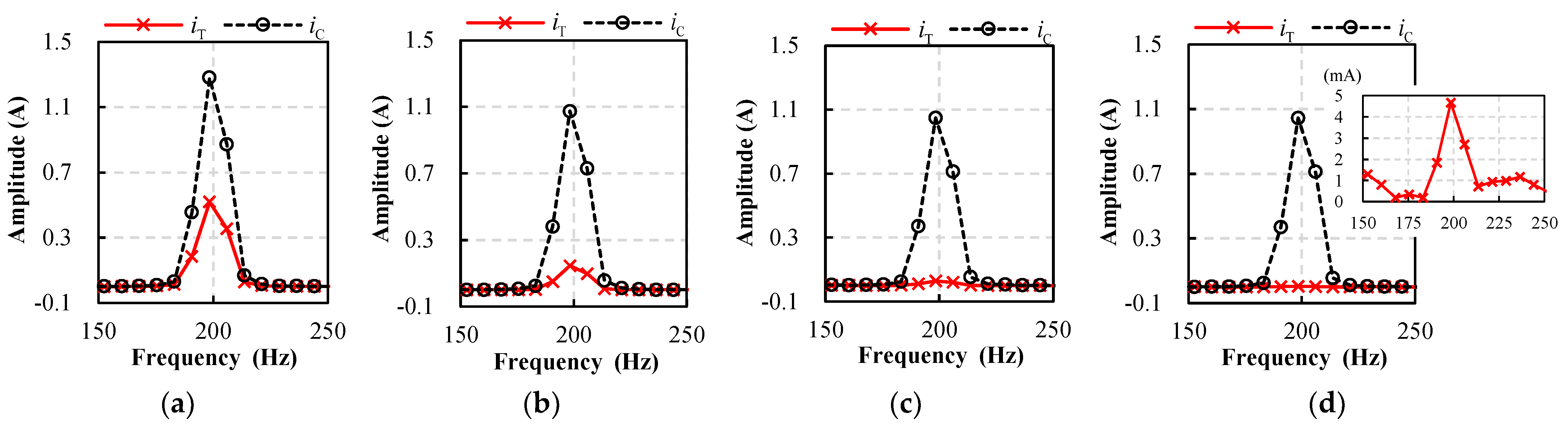
5.1. Induced Current Analysis
5.2. Calibration
5.2.1. k-d Curve
5.2.2. (F*, d)-uctrl Curves
5.3. Distance Estimation Tracking Response Test
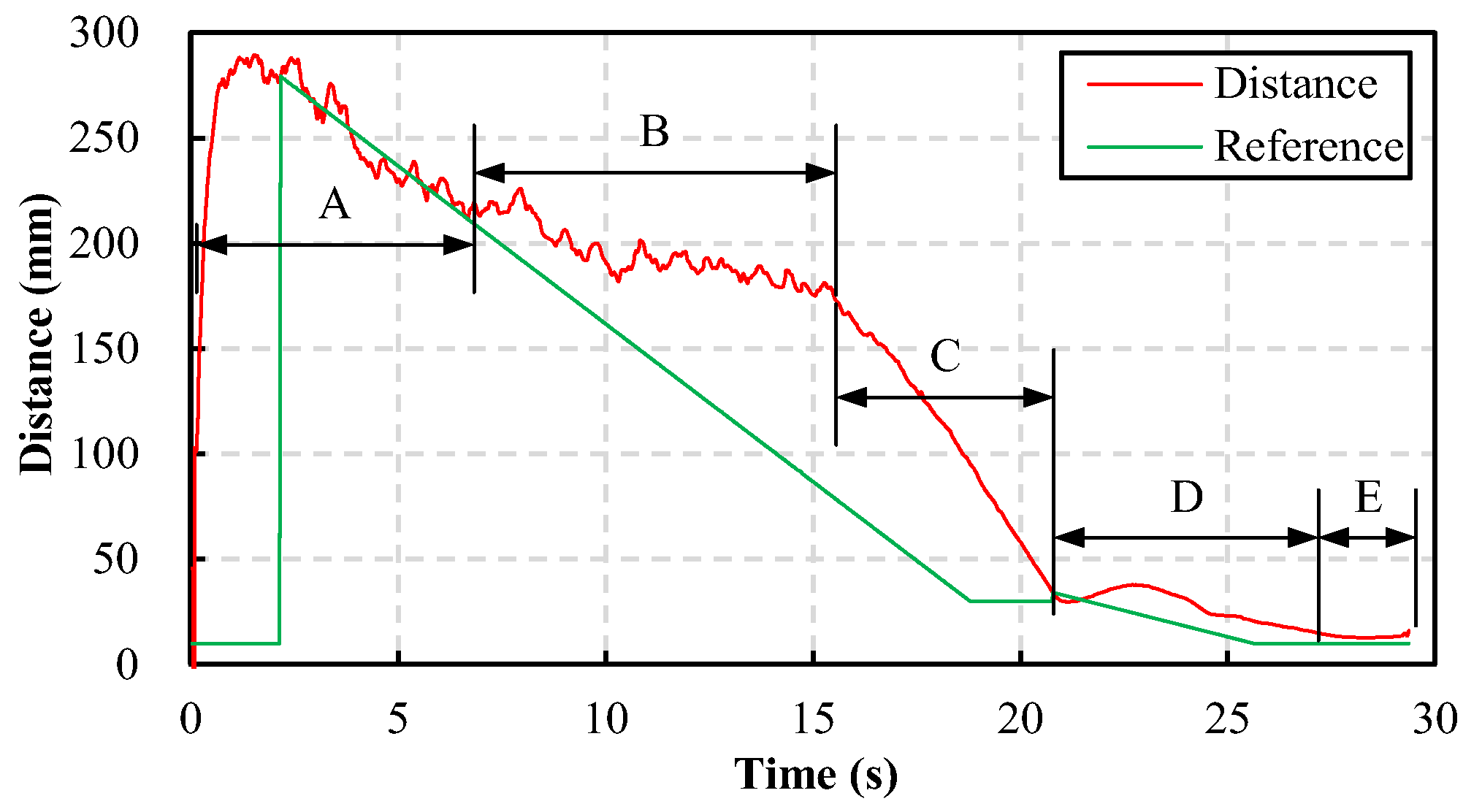
5.4. Ground-Based Docking Test
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Experiment Video
References
- Bandyopadhyay, S.; Chung, S.-J.; Foust, R.; Subramanian, G. Review of formation flying and constellation missions using nanosatellites. J. Spacecr. Rockets 2016, 53, 567–578. [Google Scholar] [CrossRef] [Green Version]
- Bonin, G.; Roth, N.; Armitage, S.; Newman, J.; Risi, B.; Zee, R. CanX–4 and CanX–5 precision formation flight: Mission accomplished! In Proceedings of the 29th AIAA/USU Conference on Small Satellites, Logan, UT, USA, 11 August 2015; pp. 1–15. [Google Scholar]
- Bonometti, J. Boom rendezvous alternative docking approach. In Proceedings of the Space 2006 Conference, San Jose, CA, USA, 19–21 September 2006; pp. 1–13. [Google Scholar]
- Foust, R.C.; Lupu, E.S.; Nakka, Y.K.; Chung, S.-J.; Hadaegh, F.Y. Ultra-soft electromagnetic docking with applications to in-orbit assembly. In Proceedings of the 69th International Astronautical Congress (IAC), Bremen, Germany, 1–5 October 2018; pp. 1–14. [Google Scholar]
- Wang, B.; Zhuang, Y.; Liu, P.; Wang, N.; Han, R. Review of spacecraft electromagnetic docking technology development. Spacecr. Eng. 2018, 27, 92–101. [Google Scholar]
- Zhang, Y.W.; Yang, L.P.; Zhu, Y.W.; Huang, H.; Qi, D.W. Spacecraft electromagnetic docking: A review on dynamics and control. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014; pp. 1–11. [Google Scholar]
- Shoer, J.; Wilson, W.; Jones, L.; Knobel, M.; Peck, M. Microgravity demonstrations of flux Pinning for station-keeping and reconfiguration of cubeSat-sized spacecraft. J. Spacecr. Rockets 2010, 47, 1066–1070. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.W. Piece-wise control of constant electromagnetic moments for spacecraft self- and soft-docking exploiting dynamics conservation. Asian J. Control. 2021, 23, 2459–2473. [Google Scholar] [CrossRef]
- Nakka, Y.K.; Foust, R.C.; Lupu, E.S.; Elliott, D.B.; Crowell, I.S.; Chung, S.-J.; Hadaegh, F.Y. A six degree-of-freedom spacecraft dynamics simulator for formation control research. In Proceedings of the 2018 AAS/AIAA Astrodynamics Specialist Conference, Snowbird, UT, USA, 1 August 2018; pp. 1–20. [Google Scholar]
- Zhang, Y.W.; Yang, L.P.; Zhu, Y.W.; Huang, H.; Cai, W.W. Nonlinear 6-DOF control of spacecraft docking with inter-satellite electromagnetic force. Acta Astronaut. 2012, 77, 97–108. [Google Scholar] [CrossRef]
- Kong, E.; Kwon, D.W.; Schweighart, S.A.; Elias, L.M.; Sedwick, R.J.; Miller, D.W. Electromagnetic formation flight for multisatellite arrays. J. Spacecr. Rockets 2004, 41, 659–666. [Google Scholar] [CrossRef]
- Huang, H.; Cai, W.W.; Yang, L.P. 6-DOF formation keeping control for an invariant three-craft triangular electromagnetic formation. Adv. Space Res. 2020, 65, 312–325. [Google Scholar] [CrossRef]
- Jones, L.L.; Wilson, W.R.; Peck, M. Design parameters and validation for a non-contacting flux-pinned docking interface. In Proceedings of the AIAA SPACE 2010 Conference & Exposition, Anaheim, CA, USA, 30 August–2 September 2010; pp. 1–11. [Google Scholar]
- Zhu, F.; Dominguez, M.; Peck, M.; Jones, L. Flight-experiment validation of the dynamic capabilities of a flux-pinned interface as a docking mechanism. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–13. [Google Scholar]
- Zhang, Y.W.; Yang, L.P.; Zhu, H.K. Spacecraft self- and soft-docking control approach with electromagnetic/magnetic flux-pinning synergy. In Proceedings of the 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 6721–6725. [Google Scholar]
- Voirin, T.; Kowaltschek, S.; Matra, O.D. NoMAD: A contactless technique for active large debris removal. In Proceedings of the 63rd International Astronautical Congress, Naples, Italy, 5 October 2012; pp. 1–14. [Google Scholar]
- Ao, H.J.; Yang, L.P.; Zhu, Y.W.; Zhang, Y.W.; Huang, H. Touchless attitude correction for satellite with constant magnetic moment. Adv. Space Res. 2017, 60, 915–924. [Google Scholar]
- Qin, Y.; Dong, W.B.; Zhao, L.P. Fractionated payload 3-DOF attitude control using only electromagnetic actuation. Aerosp. Sci. Technol. 2020, 107, 106237. [Google Scholar] [CrossRef]
- Wang, G.L.; Vella, M.; Solsona, J. Position sensorless permanent magnet synchronous machine drives—A review. IEEE Trans. Ind. Electr. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Fitzgerald, A.E.; Kingsley, C.; Umans, S.D. Electric Machinery, 6th ed.; McGraw-Hill: New York, NY, USA, 2003; p. 70. [Google Scholar]
- Duzzi, M.; Mazzucato, M.; Casagrande, R.; Moro, L.; Trevisi, F.; Vitellino, F.; Vitturi, M.; Cenedese, A.; Lorencini, E.C.; Francesconi, A. PACMAN Experiment: A CubeSat-size integrated system for proximity navigation and soft-docking. In Proceedings of the Small Satellite Systems and Services (4S Symposium), Sorrento, Italy, 1 June 2018; pp. 1–15. [Google Scholar]
- Schweighart, S.A. Electromagnetic Formation Flight Dipole Solution Planning. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Saeed, N.; Elzanaty, A.; Almorad, H.; Dahrouj, H.; Al-Naffouri, T.Y.; Alouini, M.S. CubeSat communications: Recent advances and future challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1839–1862. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions | Main Parameters | ||
|---|---|---|---|
| D0 | 300 mm | Slot filling factor | 0.62 |
| L0 | 45 mm | Wire diameter | Φ1.5 mm |
| H0 | 13.72 mm | Number of turns | 216 |
| Hc | 15.22 mm | Resistance | 1.9 Ω @ 45 °C |
| Tc | 1.5 mm | Inductance | 13.5 mH @ 100 Hz |
| 3.0 mH @ 10 kHz | |||
| Maximum allowable current | 16.4 A @ 45 °C | ||
| Coil mass | 2.765 kg | ||
| Iron-core mass | 0.55 kg | ||
| The terminal voltage of chaser electromagnet, uC | 26.0 V @ DC, 15 V @ 200 Hz |
| The terminal voltage of target electromagnet, uT | 26.0 V @ DC |
| Coil-to-coil axial distance (mm) | 10, 50, 150, 300 |
| The fixed output voltage, UDC (V) | 26 |
| The amplitude of the injected voltage, UHFI (V) | 15 |
| The frequency of the injected voltage, fHFI (Hz) | 200 |
| The upper frequency of the bandpass filter (Hz) | 205 |
| The lower frequency of the bandpass filter (Hz) | 195 |
| Parameter A of the distance lowpass filter | 0.1 |
| Parameter B of the distance lowpass filter | 0.9 |
| Parameter | Trajectory I, II | Trajectory III, IV |
|---|---|---|
| The fixed output voltage, UDC (V) | 26 | 26 |
| The amplitude of the injected voltage, UHFI (V) | 15 | 15 |
| The frequency of the injected voltage, fHFI (Hz) | 200 | 200 |
| The upper frequency of the bandpass filter (Hz) | 205 | 205 |
| The lower frequency of the bandpass filter (Hz) | 195 | 195 |
| Parameter A 1 of the distance lowpass filter | 0.1 | 0.1 |
| Parameter B 1 of the distance lowpass filter | 0.9 | 0.9 |
| Parameter A of the speed lowpass filter | 0.2 | 0.5 |
| Parameter B of the speed lowpass filter | 0.8 | 0.5 |
| Trajectory reference, d* (mm) | d1* = 30 | d2* = 10 |
| Positioning tolerance, der (mm) | der1* = 5 | der2* = 5 |
| Trajectory slope, v* (mm/s) | v1* = 15 | v2* = 5 |
| Parameter P of distance controller | 1 | 1 |
| Upper limit of distance controller output (mm/s) | 30 | 15 |
| Lower limit of distance controller output (mm/s) | −30 | −15 |
| Parameter P of speed controller | 50 | 50 |
| Parameter I of speed controller | 0.1 | 0.1 |
| Upper limit of speed controller output (N) | 1.5 | 1.5 |
| Lower limit of speed controller output (N) | −1.5 | −1.5 |
| Test No. | Docking Duration (s) | Target Power Consumption (w) | Chaser Power Consumption (w) | Duration Rank | Power Rank |
|---|---|---|---|---|---|
| 1 | 27.07 | 362.44 | 106.35 | 6 | 7 |
| 2 | 24.53 | 366.80 | 41.88 | 4 | 4 |
| 3 | 22.55 | 372.07 | 80.27 | 2 | 5 |
| 4 | 21.42 | 372.76 | 9.29 | 1 | 1 |
| 5 | 30.33 | 361.15 | 104.36 | 7 | 6 |
| 6 | 23.28 | 366.16 | 25.93 | 3 | 2 |
| 7 | 25.4 | 380.35 | 36.35 | 5 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, G.; Wu, L.; Wang, Y.; Wang, B.; Han, R. Micro- and Nanosatellite Sensorless Electromagnetic Docking Control Based on the High-Frequency Injection Method. Aerospace 2023, 10, 547. https://doi.org/10.3390/aerospace10060547
Ruan G, Wu L, Wang Y, Wang B, Han R. Micro- and Nanosatellite Sensorless Electromagnetic Docking Control Based on the High-Frequency Injection Method. Aerospace. 2023; 10(6):547. https://doi.org/10.3390/aerospace10060547
Chicago/Turabian StyleRuan, Guangzheng, Lijian Wu, Yaobing Wang, Bo Wang, and Runqi Han. 2023. "Micro- and Nanosatellite Sensorless Electromagnetic Docking Control Based on the High-Frequency Injection Method" Aerospace 10, no. 6: 547. https://doi.org/10.3390/aerospace10060547
APA StyleRuan, G., Wu, L., Wang, Y., Wang, B., & Han, R. (2023). Micro- and Nanosatellite Sensorless Electromagnetic Docking Control Based on the High-Frequency Injection Method. Aerospace, 10(6), 547. https://doi.org/10.3390/aerospace10060547