
Task Parameter Planning Algorithm for UAV Area Complete Coverage in EO Sector Scanning Mode


Abstract
:1. Introduction
- Most research on UAV coverage focuses on route planning algorithms, and the processing of EO equipment factors is too simple, or is even ignored, which does not reflect the actual situation.
- There is a lack of research on area-coverage task planning in the sector scanning mode of UAV EO equipment. There is not only a lack of descriptive model research for the problem but also a lack of task planning research combining the problem model and optimization algorithm.
- A no-omission coverage width model was established for the sector scanning of UAV EO equipment that considers the influence of target recognition.
- Description models of the constraints were established that, combined with the sector scanning method, consider the influence of various constraints on parameter planning of the area coverage task. Such as target recognition, speed-to-height ratio, and missed scanning, etc.
- A parameter planning algorithm to address the area coverage task in the sector scanning mode was designed to ensure an efficient search, based on the representative IA, GWO, and VNS algorithms, and combined with constraints.
- The three designed task planning algorithms were simulated and verified, and the main performances of these algorithms in solving the problems in this study were compared.
2. Coverage Width Modeling
2.1. Scanning Mode of the UAV EO Equipment
2.2. Model of Static View Field of EO Equipment
2.3. Complete Coverage Width Modeling
2.3.1. Problem Description
2.3.2. Equation of Trajectory
2.3.3. Equation of Trajectory
2.3.4. Equation of Straight Line
3. Constraints Modeling
3.1. Speed-to-Height Ratio Constraint Modeling
3.2. No Interval Missing Constraint Modeling
3.3. The Other Constraints
3.3.1. Constraint on Pitch Angle
3.3.2. Constraint on Rotation Angular Velocity
3.3.3. Constraint on Search Azimuth
3.3.4. Constraint on Flying Height
3.3.5. Constraint on Flying Speed
4. Design of Task Parameter Planning Algorithm
4.1. Comprehensive Task Planning Objective Model
- First, the values of each objective function are normalized for comparison at the same scale.
- 2.
- Second, according to the importance of the indices, different weight coefficients are assigned. For a complete coverage search task, the primary goal is to complete the coverage area in the shortest time, the secondary goal is to ensure search efficiency and high recognition probability, and the third goal is to ensure economy. Therefore, for the four index functions to be optimized the following is important:
- 3.
- Finally, the weighted sum of each optimization index function can be used to obtain a comprehensive task planning objective function :
4.2. Design of Task Planning Algorithm
4.2.1. Task Planning Algorithm Based on IA
| Algorithm 1: Pseudocode to calculate the complete coverage width |
| 1: Set EO static view field , set according to the target characteristics, weather condition and EO resolution; |
| 2: Calculate , according to Formulae (10) and (11), respectively; |
| 3: Calculate the time of a scanning cycle T; |
| 4: For = to 0 do |
| 5: Calculate according to Formula (18); |
| 6: Set , calculate according to Formula (21); |
| 7: If = |
| 8: Save ; |
| 9: Break out of the loop; |
| 10: End if |
| 11: End for |
| Algorithm 2: Pseudocode to judge whether a parameter set conforms to the speed-to-height constraint and the no interval missing constraint |
| 1: Set speed to height ratio ; |
| 2: Calculate , according to Formulae (1) and (5); |
| 3: Calculate the value of formula ; |
| 4: If > |
| 5: Set ; |
| 6: End if |
| 7: Calculate , according to Formulae (10) and (11) respectively; |
| 8: For = to do |
| 9: Calculate according to Formula (20); |
| 10: Calculate according to Formula (18); |
| 11: If |
| 12: Set ; |
| 12: Break out of the loop; |
| 10: End if |
| 11: End for |
| Algorithm 3: Pseudocode of the main program of the task planning algorithm |
| 1: Initial parameters of IA, including mutation probability , crossover probability , update probability , population number N, the maximum evolutionary number . Set static view field , the minimum pitch angle , the maximum scanning angular velocity , the minimum flight altitude , the minimum speed , the maximum speed , the best cruise speed , the best cruise altitude . Set the weight coefficients , , and . |
| 2: Initial coordinates of the area to be searched; |
| 3: According to the parameter threshold ranges expressed by Equations (32)–(38), 50 task parameter sets are randomly generated to form the initial IA antibody population. Each set contains 4 parameters ; |
| 4: For i = 1 to do |
| 5: Calculate the index of every set as their fitness based on Algorithm 1 and Formula (45); |
| 6: Check whether every set meet the speed to height constraint and the no interval missing constraint according to Algorithm 2. |
| 7: The vector distance concentration of each antibody in the population are calculated based on their fitness, , and the selection probability of each antibody are calculated based on the vector distance concentration, ; |
| 8: Antibody selection is implemented based on the concentration regulation mechanism of IA, and clonal expansion is implemented based on clonal selection probability ; |
| 9: Each antibody in the clonal amplified population is mutated, the mutation probability , and each parameter of the antibody obtained by mutation should conform to their threshold range limitation. |
| 10: Determine whether the number of antibodies in the current population reaches 50. If not, randomly produce antibodies to supplement the population to 50. |
| 11: End for |
4.2.2. Task Planning Algorithm Based on GWO
| Algorithm 4: Pseudocode of the main program of the task planning algorithm based on GWO |
| 1: Initialize the grey wolf population (i = 1, 2, …, 50). According to the parameter threshold ranges expressed by Equations (32)–(38), 50 task parameter sets are randomly generated to form the initial grey wolf population, each grey wolf contains 4 parameters ; |
| 2: Initialize , , , = 0; initialize max number of iterations ; |
| 3: Calculate the index of each grey wolf as their fitness based on Algorithm 1 and Formula (45); set = the best grey wolf, = the second-best grey wolf, = the third-best grey wolf. |
| 4: While (t < ) do |
| 5: Calculate ; |
| 6: For i = 1 to 50 do |
|
7: Calculate the index of the ith grey wolf as its fitness based on Algorithm 1 and Formula (45); Update , , based on , , , ; |
| 8: End for |
| 9: For i = 1 to 50 do |
| 10: Randomly generated , , update A and C, , ; |
| 11: Update , calculate ; |
| 12: Update , calculate ; |
| 13: Update , calculate ; |
| 14: Calculate ; |
| 15: End for |
| 16: ; |
| 17: End while |
| 18: Return ; |
4.2.3. Task Planning Algorithm Based on VNS
| Algorithm 5: Pseudocode of the main program of the task planning algorithm based on VNS |
| 1: Set the maximum number of iterations of the outer loop ; Initialize a set of neighborhood structures , , set the number of cycles for VND ; |
| 2: According to the parameter threshold ranges expressed by Equations (32)–(38), initial solution is generated, contains 4 parameters ; calculate the index of based on Algorithm. 1 and Formula (45) as its fitness ; |
| 3: Initialize the best solution , initialize the fitness of as ; |
| 4: While (t < ) do |
| 5: For i = 1 to 3 do /* Shaking */ |
| 6: generate a random solution from the kth neighborhood of ; |
| 7: End for |
| 8: Calculate the fitness of ; |
| 9: For i = 1 to 3 do /* local search by VND */ |
| 10: Set = [], = 0; |
| 11: For j = 1 to M do |
| 12: Generate a solution according to and the rules of the ith neighborhood ; |
| 13: Calculate the fitness of ; |
| 14: If > |
| 15: Update and ; |
| 16: End if |
| 17: End for |
| 18: If > |
| 19: Update = and =; |
| 20: End if |
| 21: If > |
| 22: i = 1, continue to search within ; update = and = ; |
| 23: Else |
| 24: i = i + 1; |
| 25: End if |
| 26: End for |
| 27: End while |
| 28: Return ; |
5. Simulation and Discussion
5.1. Search Range and Full Coverage Width Simulation
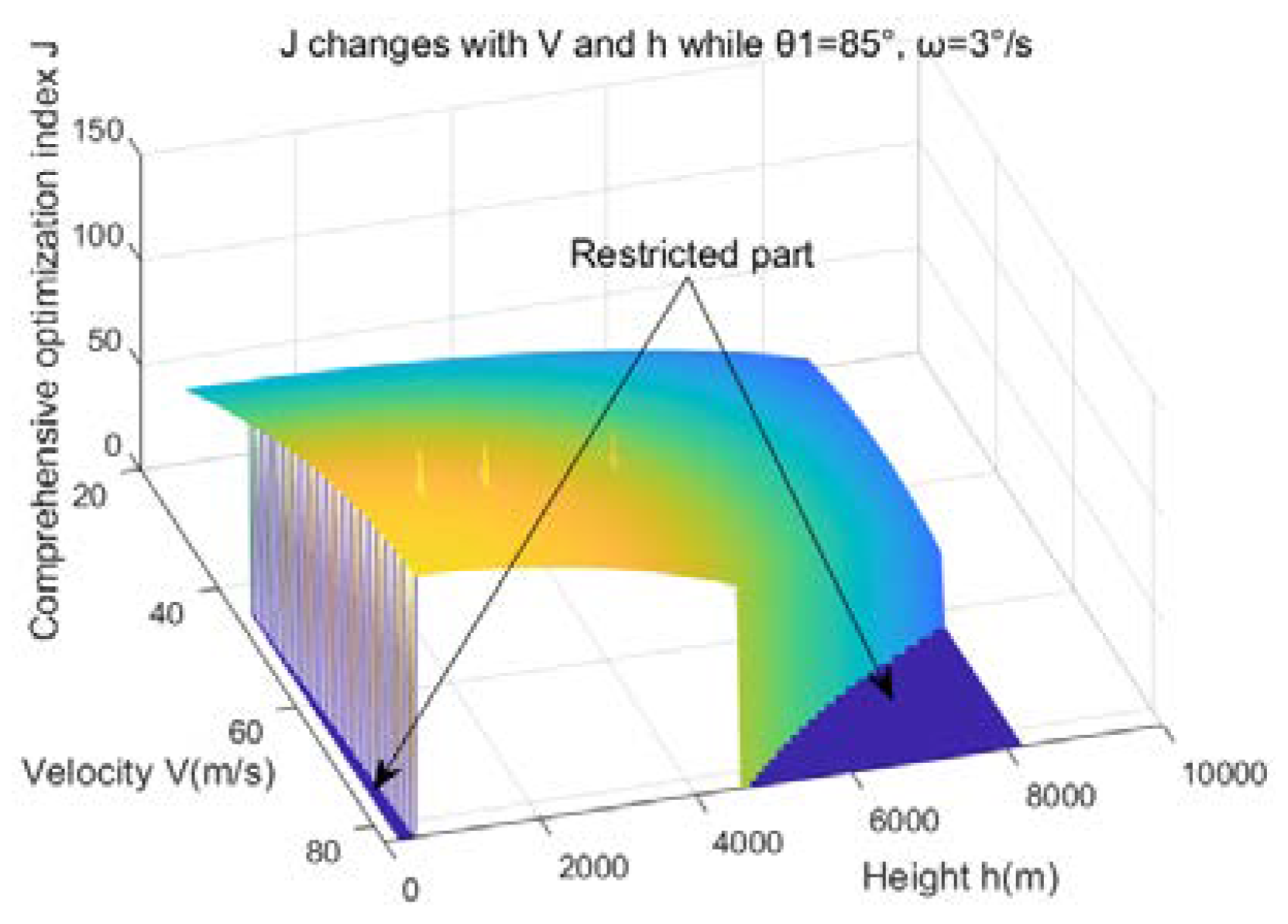
5.2. Analysis of the Changes of J
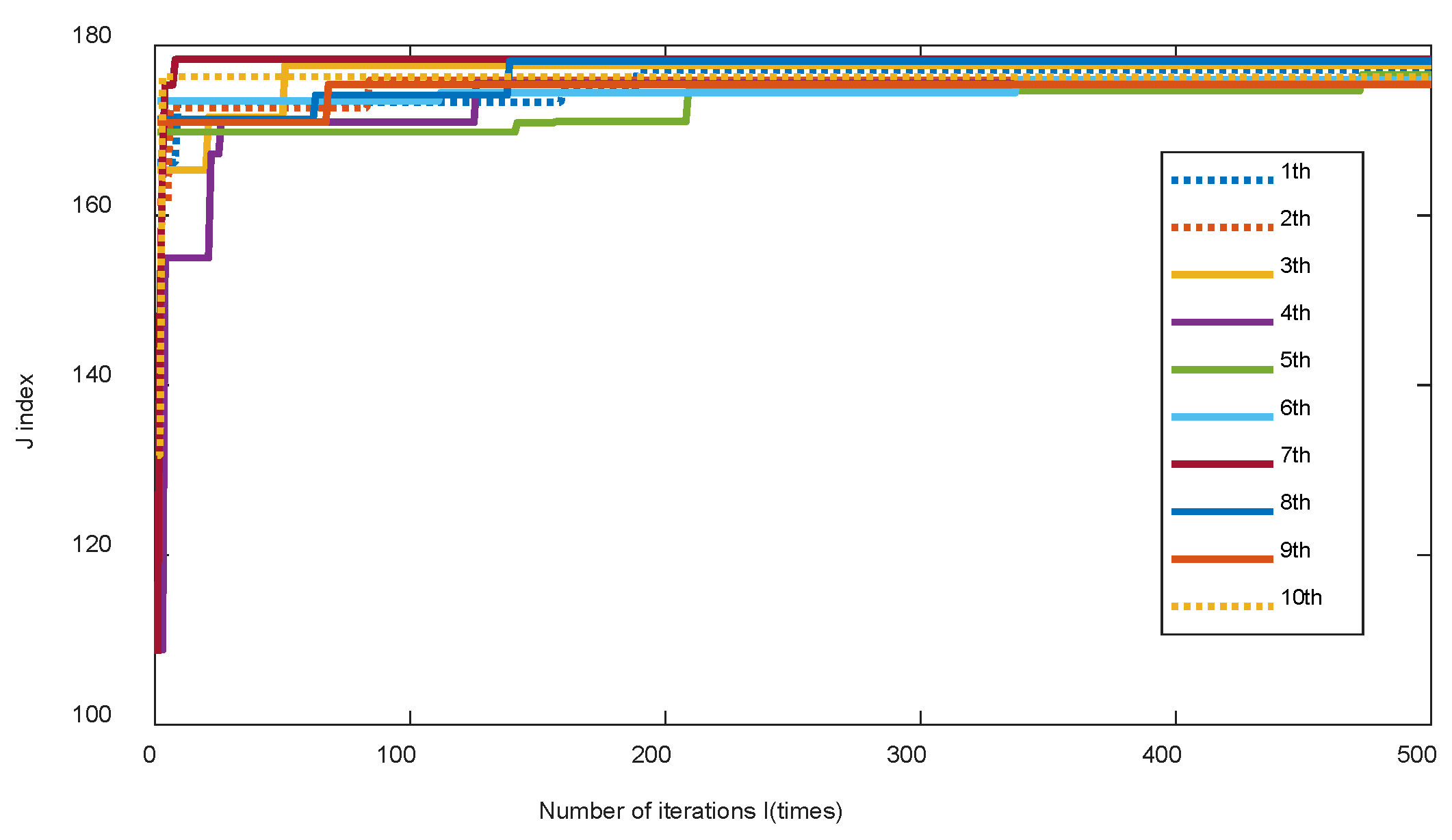
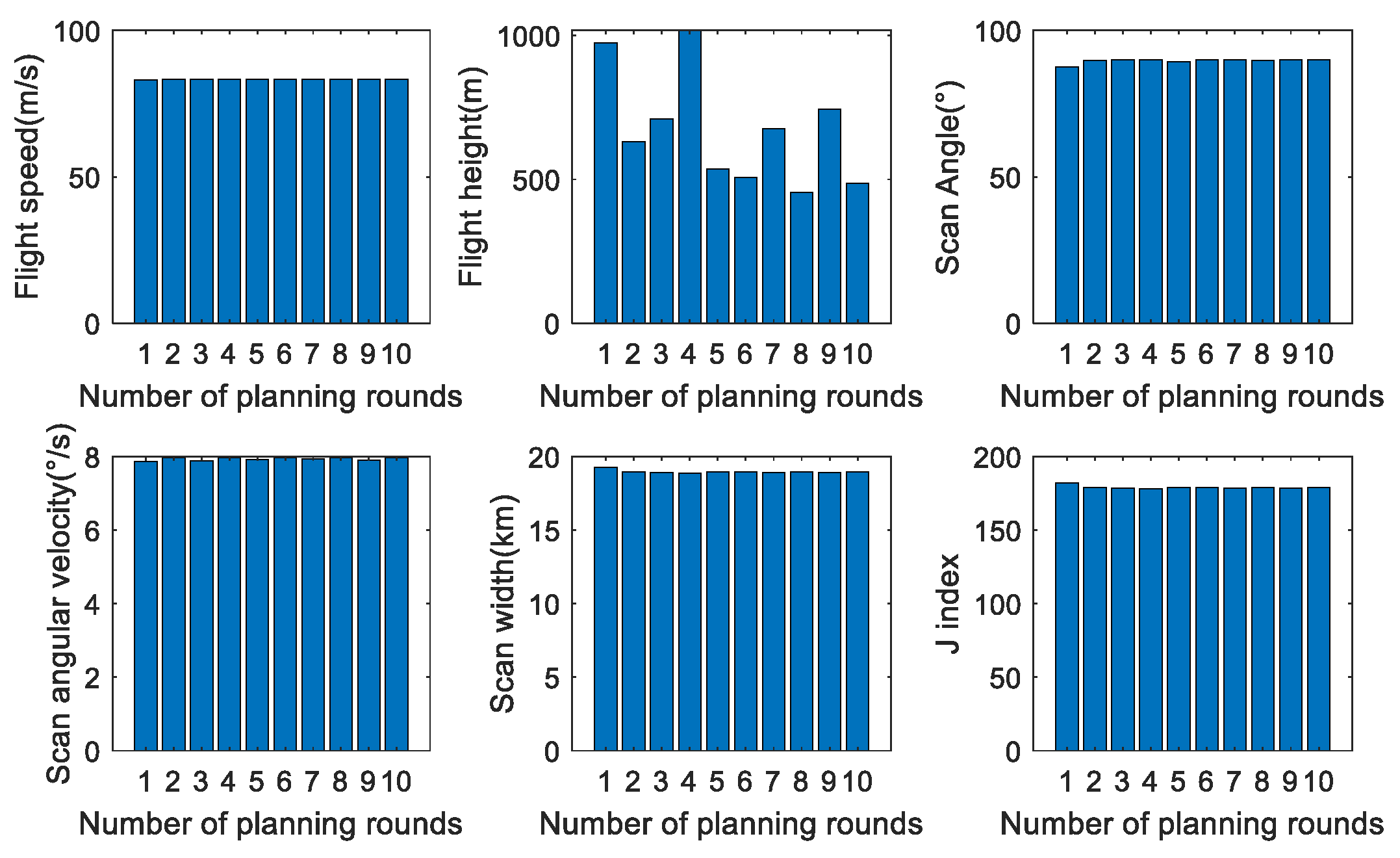
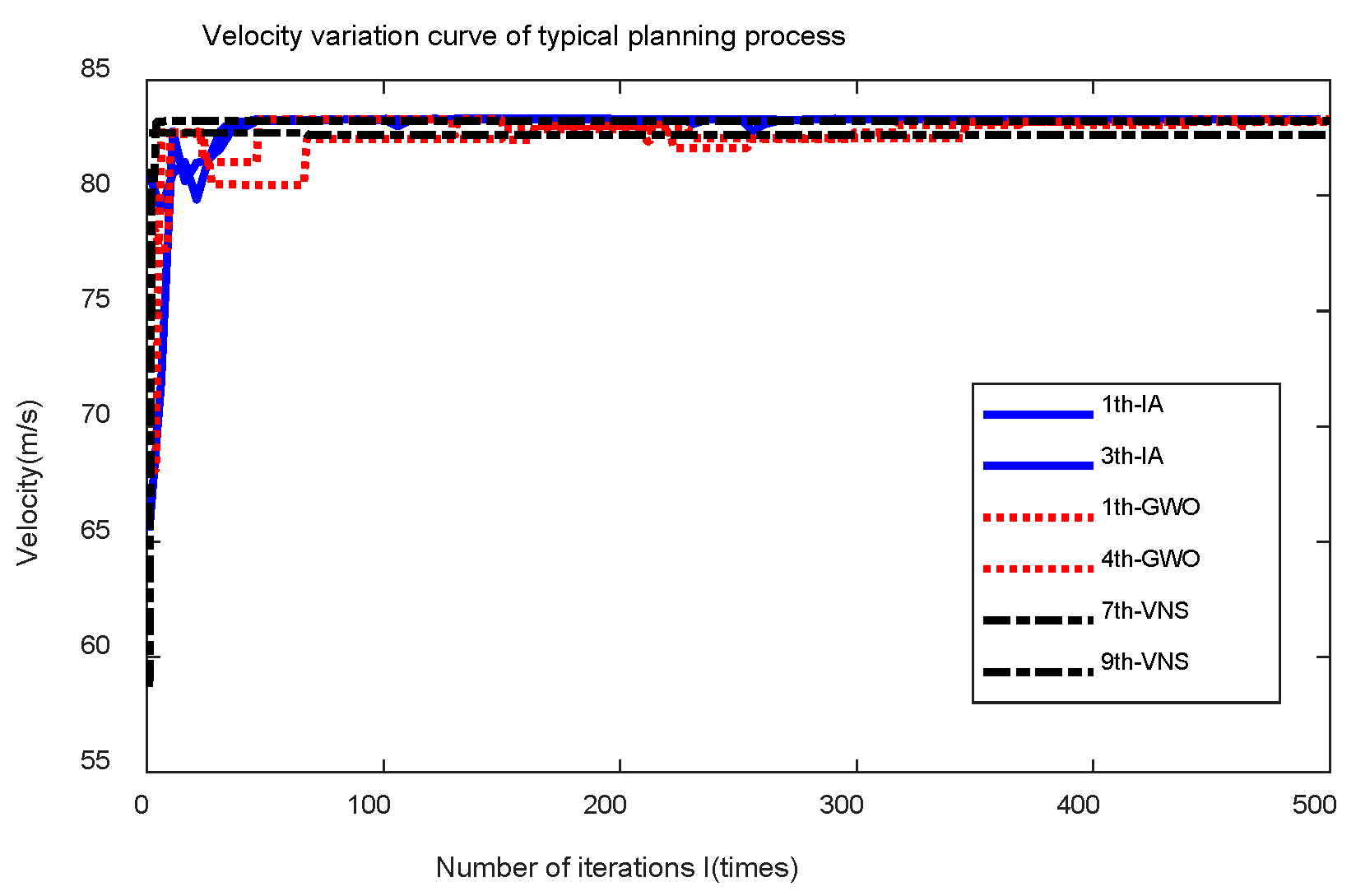
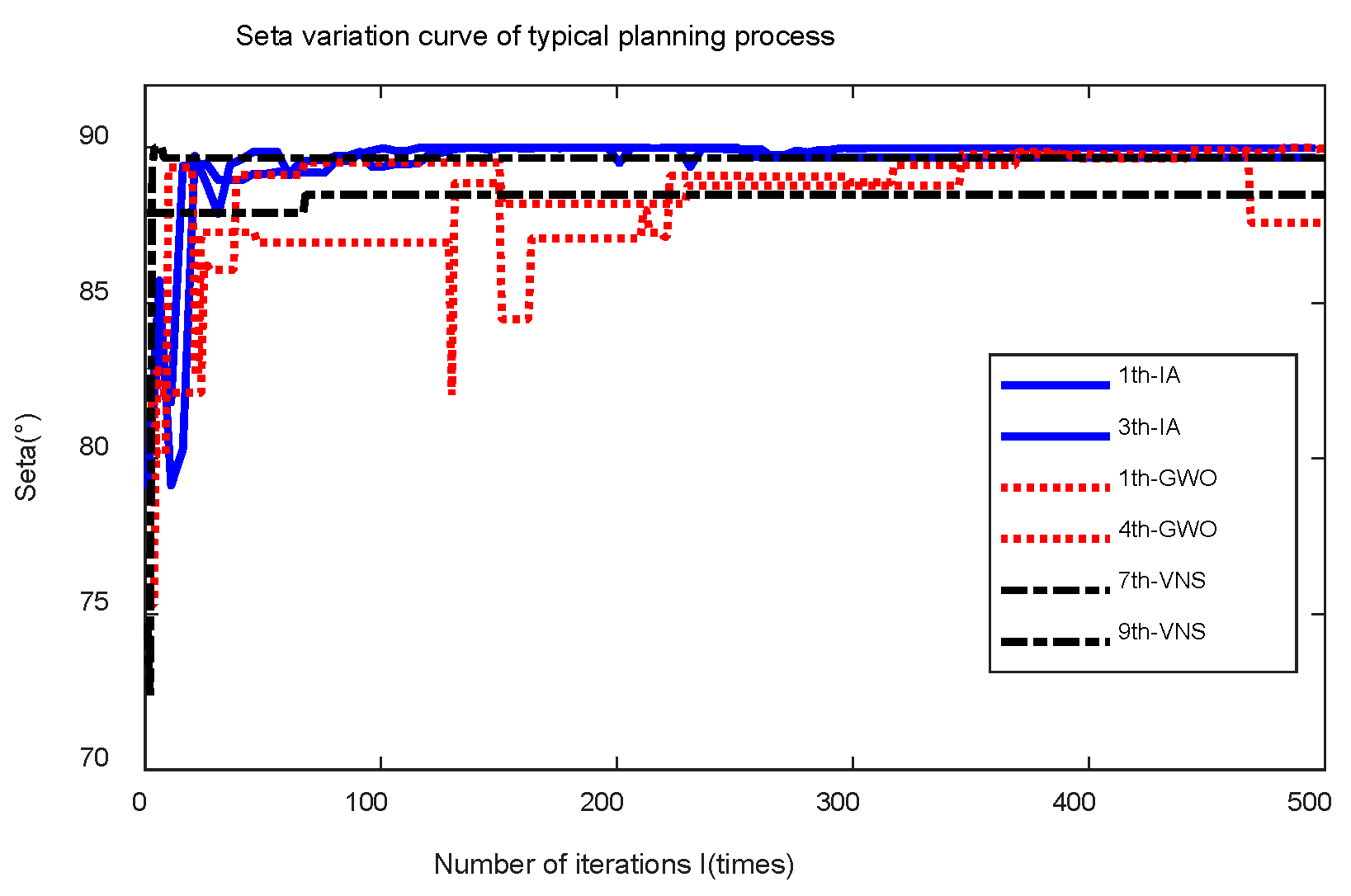
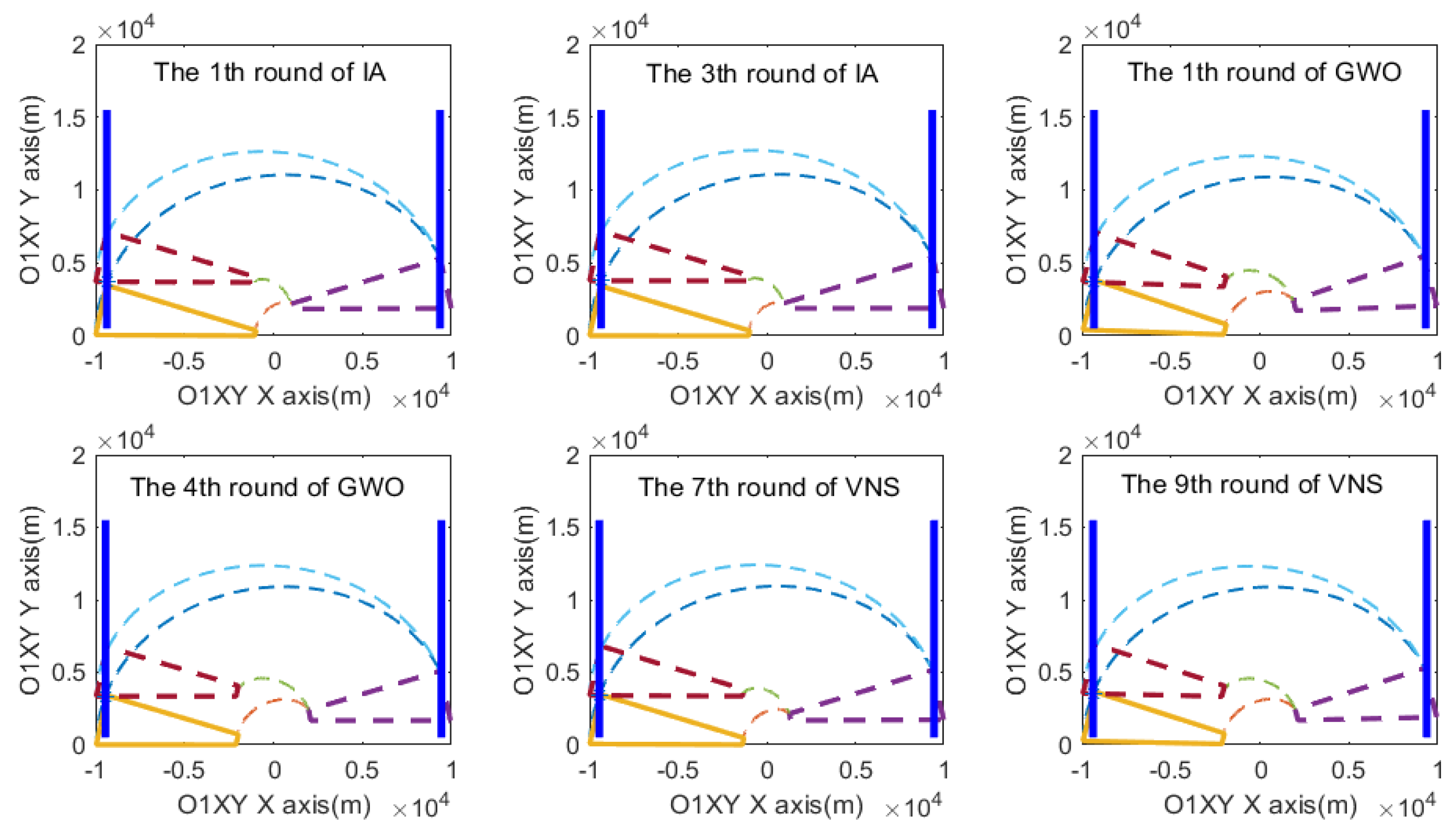
5.3. Task Planning Simulation Based on IA, GWO and VNS
5.4. Comparison of Area Coverage under Different Parameter Sets
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned Aerial Vehicle Routing Problems: A Literature Review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Gómez-Silva, M.J.; Moreno, F.M.; de la Escalera, A.; Armingol, J.M. An Appearance-Based Tracking Algorithm for Aerial Search and Rescue Purposes. Sensors 2019, 19, 652. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erdos, D.; Erdos, A.; Watkins, S.E. An experimental UAV system for search and rescue challenge. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 32–37. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Ji Yeong, L. Sensor-based coverage with extended range detectors. IEEE Trans. Robot. 2006, 22, 189–198. [Google Scholar] [CrossRef]
- Tan, L.Z.; Tan, P.; Wang, B. Computing Method of Aerial Searching’s Sweep Width at Sea. Ship Electron. Eng. 2019, 39, 146–150. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Zhou, J. A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios. Knowl.-Based Syst. 2020, 204, 106209. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Liu, L.; Long, T.; Wen, Y. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chin. J. Aeronaut. 2018, 31, 339–350. [Google Scholar] [CrossRef]
- Chen, Z.; Yafei, L.U.; Hou, Z.; Wang, J. UAV’s Coverage Search Planning Algorithm Based on Action Combinations. J. Shanghai Jiao Tong Univ. 2019, 24, 48–57. [Google Scholar] [CrossRef]
- Long, D.; Rehm, P.J.; Ferguson, S. Benefits and challenges of using unmanned aerial systems in the monitoring of electrical distribution systems. Electr. J. 2018, 31, 26–32. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Optimal complete terrain coverage using an Unmanned Aerial Vehicle. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Choset, H. Coverage of Known Spaces: The Boustrophedon Cellular Decomposition. Auton. Robot. 2000, 9, 247–253. [Google Scholar] [CrossRef]
- Mannadiar, R.; Rekleitis, I. Optimal coverage of a known arbitrary environment. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Lumelsky, V.J.; Mukhopadhyay, S.; Sun, K. Dynamic path planning in sensor-based terrain acquisition. IEEE Trans. Robot. Autom. 1990, 6, 462–472. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.; Yuta, S. Planning paths of complete coverage of an unstructured environment by a mobile robot. In Proceedings of the International Conference on Advanced Robotics, Tokyo, Japan, 6–7 July 1993; pp. 533–538. [Google Scholar]
- Yang, S.X.; Luo, C. A neural network approach to complete coverage path planning. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2004, 34, 718–724. [Google Scholar] [CrossRef]
- Perez-Carabaza, S.; Besada-Portas, E.; Lopez-Orozco, J.A.; de la Cruz, J.M. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Appl. Soft Comput. 2018, 62, 789–806. [Google Scholar] [CrossRef]
- Majeed, A.; Lee, S. A New Coverage Flight Path Planning Algorithm Based on Footprint Sweep Fitting for Unmanned Aerial Vehicle Navigation in Urban Environments. Appl. Sci. 2019, 9, 1470. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhong, M.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Wu, X.; Bai, W.; Xie, Y.; Sun, X.; Deng, C.; Cui, H. A hybrid algorithm of particle swarm optimization, metropolis criterion and RTS smoother for path planning of UAVs. Appl. Soft Comput. 2018, 73, 735–747. [Google Scholar] [CrossRef]
- De Alcantara Andrade, F.A.; Reinier Hovenburg, A.; Netto de Lima, L.; Dahlin Rodin, C.; Johansen, T.A.; Storvold, R.; Moraes Correia, C.A.; Barreto Haddad, D. Autonomous Unmanned Aerial Vehicles in Search and Rescue Missions Using Real-Time Cooperative Model Predictive Control. Sensors 2019, 19, 4067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rafifandi, R.; Asri, D.L.; Ekawati, E.; Budi, E.M. Leader–follower formation control of two quadrotor UAVs. SN Appl. Sci. 2019, 1, 539. [Google Scholar] [CrossRef] [Green Version]
- Qingbo, W.; Shaolei, Z.; Yan, S. Multi-UAVs cooperative coverage reconnaissance in complex area. Tactical Missile Technol. 2016, 21, 50–55. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Yin, F.; Wang, W.; Sun, H.; Li, J.; Zhang, K. An intelligent UAV path planning optimization method for monitoring the risk of unattended offshore oil platforms. Process Saf. Environ. Prot. 2022, 160, 13–24. [Google Scholar] [CrossRef]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows Using UAV Imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef] [Green Version]
- Avellar, G.S.C.; Pereira, G.A.S.; Pimenta, L.C.A.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [Green Version]
- Di Franco, C.; Buttazzo, G. Coverage Path Planning for UAVs Photogrammetry with Energy and Resolution Constraints. J. Intell. Robot. Syst. 2016, 83, 445–462. [Google Scholar] [CrossRef]
- Pestana, J.; Sanchez-Lopez, J.L.; Campoy, P.; Saripalli, S. Vision based GPS-denied Object Tracking and following for unmanned aerial vehicles. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linköping, Sweden, 21–26 October 2013. [Google Scholar]
- Al-Kaff, A.; Martn, D.; Garca, F.; Escalera, A.d.l.; Armingol, J.M. Survey of computer vision algorithms and applications for unmanned aerial vehicles. Expert Syst. Appl. 2018, 92, 447–463. [Google Scholar] [CrossRef]
- Cheng, G.; Zhou, P.; Han, J. Learning Rotation-Invariant Convolutional Neural Networks for Object Detection in VHR Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7405–7415. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, J.; Li, B.; Jiang, Y.; Wen, C.-y. A Camera-Based Target Detection and Positioning UAV System for Search and Rescue (SAR) Purposes. Sensors 2016, 16, 1778. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Greenlaw, R.; Hoover, H.J. CHAPTER 1—Introduction. In Fundamentals of the Theory of Computation: Principles and Practice; Greenlaw, R., Hoover, H.J., Eds.; Morgan Kaufmann: Oxford, UK, 1998; pp. 1–18. [Google Scholar]
- Mulvey, J.M.; Vanderbei, R.J.; Zenios, S.A. Robust Optimization of Large-Scale Systems. Oper. Res. 1995, 43, 264–281. [Google Scholar] [CrossRef] [Green Version]
- Fomin, F.V. Proceedings of the Graph-Theoretic Concepts in Computer Science: 32nd International Workshop, WG 2006, Bergen, Norway, 22–23 June 2006.
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Seyyedabbasi, A.; Kiani, F.; Allahviranloo, T.; Fernandez-Gamiz, U.; Noeiaghdam, S. Optimal data transmission and pathfinding for WSN and decentralized IoT systems using I-GWO and Ex-GWO algorithms. Alex. Eng. J. 2023, 63, 339–357. [Google Scholar] [CrossRef]
- Zhang, X.; Ren, Y.; Zhen, G.; Shan, Y.; Chu, C. A color image contrast enhancement method based on improved PSO. PLoS ONE 2023, 18, e0274054. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Ersoy, O.K.; He, M.; Wang, F. Multi-offspring genetic algorithm and its application to the traveling salesman problem. Appl. Soft Comput. 2016, 43, 415–423. [Google Scholar] [CrossRef]
- Shen, Y.; Gao, Y.; Yuan, M.; Sun, H.; Guo, Z. Multi-Objective Immune Optimization of Path Planning for Ship Welding Robot. Electronics 2023, 12, 2040. [Google Scholar] [CrossRef]
- Kong, M.; Zhou, J.; Pei, J.; Liu, X.; Pardalos, P.M. A modified variable neighborhood search algorithm for manufacturer selection and order acceptance in distributed virtual manufacturing network. Optim. Lett. 2022, 16, 117–135. [Google Scholar] [CrossRef]
- Razzaq, S.; Xydeas, C.; Mahmood, A.; Ahmed, S.; Ratyal, N.I.; Iqbal, J. Efficient optimization techniques for resource allocation in UAVs mission framework. PLoS ONE 2023, 18, e0283923. [Google Scholar] [CrossRef] [PubMed]
- Bensi, E.A.B.; Spijkerman, R.; Brown, P.A.; Knights, S.; Nellensteijn, D.R. Helicopter-Based Search and Rescue Operations in the Dutch Caribbean: A Retrospective Analysis. Wilderness Environ. Medicine 2023, 34, 31–37. [Google Scholar] [CrossRef] [PubMed]
- Arkin, V. A Problem of Optimum Distribution of Search Effort. Theory Probab. Its Appl. 1964, 9, 159–160. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, M.; Xu, X.; Yen, G.G. Multi-objective evolution strategy for multimodal multi-objective optimization. Appl. Soft Comput. 2021, 101, 107004. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Tan, S. A multi-objective evolutionary algorithm for steady-state constrained multi-objective optimization problems. Appl. Soft Comput. 2021, 101, 107042. [Google Scholar] [CrossRef]
- Du, W.; Zhong, W.; Tang, Y.; Du, W.; Jin, Y. High-Dimensional Robust Multi-Objective Optimization for Order Scheduling: A Decision Variable Classification Approach. IEEE Trans. Ind. Inform. 2019, 15, 293–304. [Google Scholar] [CrossRef] [Green Version]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | V (m/s) | h (m) | (°) | (°/s) | (m) | (m2/s) |
|---|---|---|---|---|---|---|
| (a) | 80 | 3500 | 75 | 2 | 5822.3 | 465,784 |
| (b) | 70 | 2500 | 60 | 3 | 11,968.2 | 837,774 |
| (c) | 60 | 2000 | 80 | 3 | 14,979.7 | 898,782 |
| (d) | 83 | 3000 | 80 | 4 | 14,161.5 | 1,175,406 |
| (e) | 83 | 1500 | 85 | 2.5 | 9877.3 | 819,816 |
| (f) | 83 | 5000 | 85 | 2.5 | 7105.5 | 589,757 |
| Serial Number | V (m/s) | h (m) | (°) | (°/s) | (m) | (m2/s) | (s) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 83.30 | 432.85 | 89.68 | 7.26 | 19.36 | 1.61 | 183.84 | 47.66 |
| 2 | 83.33 | 398.33 | 89.99 | 7.29 | 18.77 | 1.56 | 178.03 | 57.31 |
| 3 | 83.32 | 418.92 | 89.98 | 7.07 | 18.71 | 1.56 | 177.72 | 51.14 |
| 4 | 83.33 | 418.06 | 89.99 | 7.26 | 18.76 | 1.56 | 177.96 | 53.22 |
| 5 | 83.33 | 409.00 | 89.98 | 7.85 | 18.95 | 1.58 | 179.12 | 60.77 |
| 6 | 83.33 | 442.65 | 90.00 | 7.56 | 18.87 | 1.57 | 178.67 | 47.48 |
| 7 | 83.21 | 400.91 | 89.94 | 7.70 | 18.97 | 1.58 | 179.23 | 54.05 |
| 8 | 83.29 | 429.07 | 89.99 | 8.00 | 19.01 | 1.58 | 179.41 | 45.22 |
| 9 | 83.33 | 396.68 | 89.99 | 8.00 | 19.01 | 1.58 | 179.52 | 44.14 |
| 10 | 83.33 | 407.84 | 89.99 | 7.48 | 18.83 | 1.57 | 178.37 | 42.70 |
| Serial Number | V (m/s) | h (m) | (°) | (°/s) | (m) | (m2/s) | (s) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 83.22 | 974.90 | 87.59 | 7.86 | 19.27 | 1.60 | 182.07 | 58.06 |
| 2 | 83.32 | 630.72 | 89.83 | 7.98 | 18.94 | 1.58 | 178.81 | 45.86 |
| 3 | 83.33 | 709.02 | 89.98 | 7.88 | 18.90 | 1.58 | 178.65 | 53.97 |
| 4 | 83.33 | 1017.45 | 89.97 | 7.97 | 18.87 | 1.57 | 178.22 | 68.81 |
| 5 | 83.29 | 535.72 | 89.28 | 7.92 | 18.96 | 1.58 | 179.02 | 46.38 |
| 6 | 83.32 | 507.00 | 90.00 | 7.97 | 18.95 | 1.58 | 178.99 | 45.12 |
| 7 | 83.32 | 675.99 | 89.97 | 7.93 | 18.92 | 1.58 | 178.72 | 44.57 |
| 8 | 83.33 | 455.82 | 89.84 | 7.98 | 18.95 | 1.58 | 178.95 | 38.47 |
| 9 | 83.32 | 744.37 | 89.99 | 7.90 | 18.90 | 1.58 | 178.62 | 61.12 |
| 10 | 83.33 | 487.38 | 89.97 | 7.98 | 18.95 | 1.58 | 179.02 | 37.62 |
| Serial Number | V (m/s) | h (m) | (°) | (°/s) | (m) | (m2/s) | (s) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 83.01 | 575.38 | 89.37 | 7.50 | 18.77 | 1.56 | 177.07 | 42.07 |
| 2 | 83.31 | 1654.54 | 89.35 | 7.96 | 18.63 | 1.55 | 175.93 | 46.29 |
| 3 | 83.21 | 400.86 | 89.50 | 7.48 | 18.79 | 1.56 | 177.71 | 38.82 |
| 4 | 82.64 | 474.15 | 89.03 | 7.22 | 18.67 | 1.54 | 175.62 | 40.13 |
| 5 | 83.28 | 1437.23 | 89.99 | 7.61 | 18.66 | 1.55 | 176.58 | 37.40 |
| 6 | 83.23 | 582.76 | 87.29 | 7.72 | 18.64 | 1.55 | 175.98 | 37.24 |
| 7 | 83.23 | 589.85 | 89.66 | 7.92 | 18.90 | 1.57 | 178.37 | 42.71 |
| 8 | 83.20 | 463.49 | 89.99 | 7.53 | 18.84 | 1.57 | 178.15 | 40.09 |
| 9 | 82.63 | 1041.88 | 88.47 | 7.91 | 18.74 | 1.55 | 175.41 | 37.88 |
| 10 | 83.26 | 1331.90 | 89.06 | 7.80 | 18.67 | 1.55 | 176.35 | 41.46 |
| Test (a) | Test (b) | Test (c) | Test (d) | Test (e) | |
|---|---|---|---|---|---|
| Coverage width d1 (m) | 18,731 | 18,643 | 18,904 | 11,968 | 19,071 |
| Number of scanning lines | 9 | 9 | 9 | 14 | 9 |
| Time to complete coverage (s) | 10,742 | 10,858 | 10,761 | 19,328 | 11,331 |
| Miss ratio Pmissed | 0% | 0% | 0% | 0% | 13.96% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, X.; Hou, M.; Li, W.; Chen, C.; Feng, Z.; Wang, M. Task Parameter Planning Algorithm for UAV Area Complete Coverage in EO Sector Scanning Mode. Aerospace 2023, 10, 612. https://doi.org/10.3390/aerospace10070612
Jing X, Hou M, Li W, Chen C, Feng Z, Wang M. Task Parameter Planning Algorithm for UAV Area Complete Coverage in EO Sector Scanning Mode. Aerospace. 2023; 10(7):612. https://doi.org/10.3390/aerospace10070612
Chicago/Turabian StyleJing, Xianyong, Manyi Hou, Wei Li, Cui Chen, Zhishu Feng, and Mingwei Wang. 2023. "Task Parameter Planning Algorithm for UAV Area Complete Coverage in EO Sector Scanning Mode" Aerospace 10, no. 7: 612. https://doi.org/10.3390/aerospace10070612
APA StyleJing, X., Hou, M., Li, W., Chen, C., Feng, Z., & Wang, M. (2023). Task Parameter Planning Algorithm for UAV Area Complete Coverage in EO Sector Scanning Mode. Aerospace, 10(7), 612. https://doi.org/10.3390/aerospace10070612