
Suggestions for Criteria to Evaluate Lateral-Directional Nonlinear Pilot-Induced Oscillations Due to Fly-by-Wire Civil Aircraft Landing Configuration Switch


Abstract
:1. Introduction
2. Digital Test of Lateral-Directional PIO Prediction Due to Landing Configuration Switching
2.1. Effect of Configuration Switching on Aircraft Dynamic Characteristics
2.2. Test Task and State Determination
2.3. Digital Test Example
3. Characteristic Parameters of Lateral-Directional PIO Due to Landing Configuration Switch
3.1. Instantaneous Amplitude–Frequency Response Peak of Pilot–Vehicle Closed-Loop at Switching
- According to Ref. [17], Zaal’s pilot model is selected to establish the CL-PVS, whose transfer function is as follows [23]:where and Gn both represent the limiting characteristics of the pilot’s manipulation ability. represents the pilot response delay, and the delay time τv is generally 0.3 s. Gn is a simplified expression of a pilot’s neuromotor limb dynamics model, mathematically described as a second-order oscillation element with natural frequency ωn equal to 10 rad/s and damping ratio ξn equal to 0.707:
- Considering only roll damping, the aircraft’s roll motion response in Equation (1) is simplified to the first-order inertial element Kϕ/(s + 1/TR). To compensate for the response lag generated by the first-order inertial element, the lead time parameter Tl in the pilot control model in Equation (3) can be taken as the roll time constant TR1 of the cruise configuration aircraft, namely:Tl = TR1 = 0.67 s,
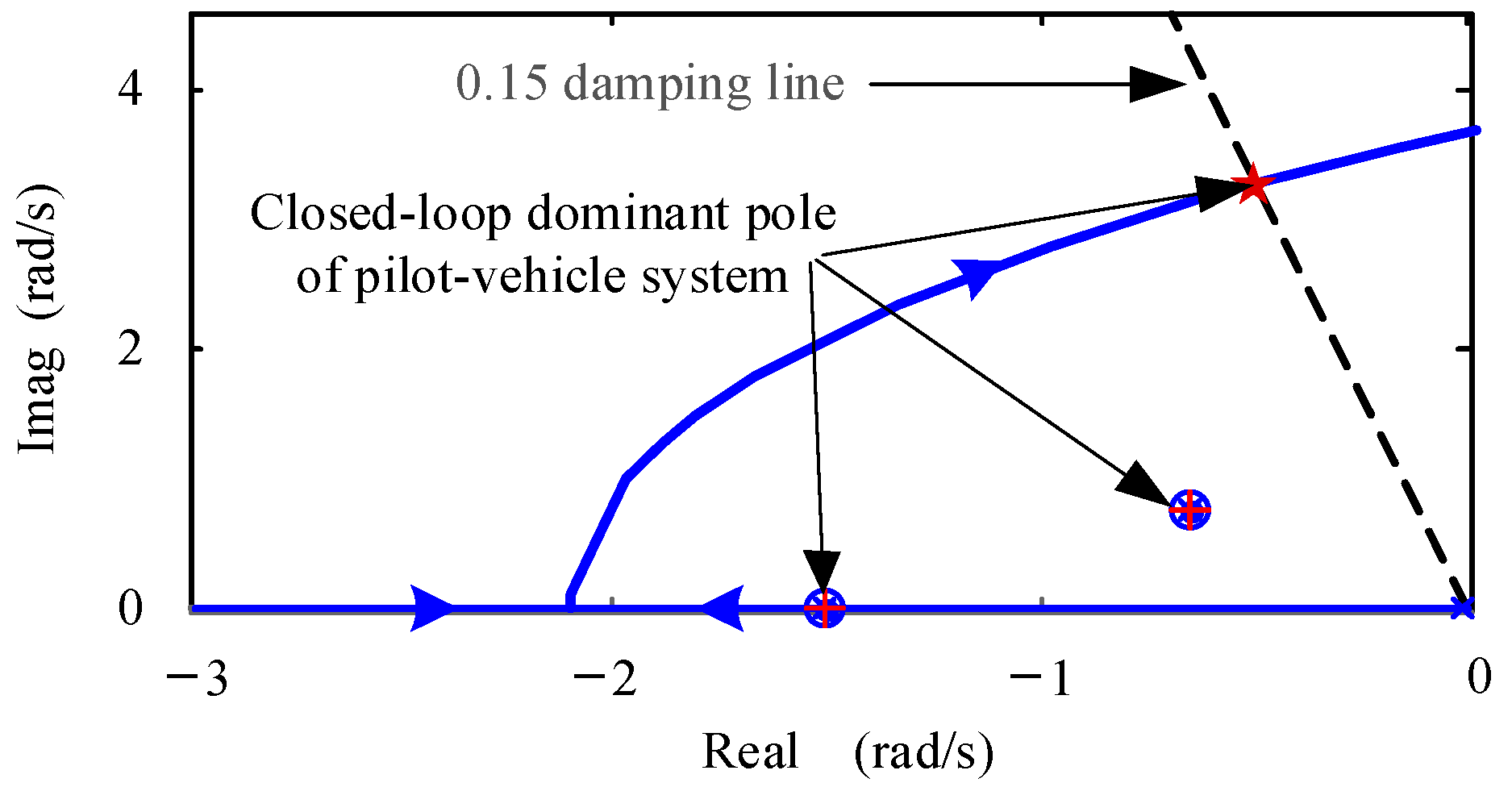
- The root locus plot of the CL-PVS during cruising is shown in Figure 7. According to Ref. [28], to limit the overshoot in the tracking task, the damping ratio of the leading pole of the CL-PVS should be 0.15. To this end, the pilot’s control gain is adjusted to Kp = 3.39 N/rad to meet the requirement of a 0.15 damping ratio of the CL-PVS.
- According to the principle of automatic control [27], the OL-PVS shown in Figure 6b can be used to evaluate the stability of the CL-PVS. The frequency of the OL-PVS with an amplitude of 0 dB is called the crossing frequency ωc. If the corresponding phase lag at ωc is close to or greater than 180°, the CL-PVS is unstable and prone to the PIO phenomenon. Therefore, to ensure that the CL-PVS has sufficient stability and is not prone to Category I or II PIOs, it is necessary to check the phase margin of the OL-PVS during cruise. If the phase margin is not less than 45°, the pilot’s control gain Kp in Equation (3) remains unchanged; otherwise, gradually reduce Kp until the OL-PVS has a phase margin of 45°. In test case F17, when Kp = 3.39 N/rad, the pilot–vehicle system phase margin is 22.6°, which does not meet the requirements. When Kp decreases to 2.22 N/rad, the pilot–vehicle system phase margin is exactly 45°; thus, Kp = 2.22 N/rad.By adjusting the pilot’s control gain Kp, the following requirements have been met during cruise flight:
- The damping ratio of the dominant pole of the CL-PVS is no less than 0.15, and the tracking overshoot is small, meeting the requirements for the pilot’s control stability [28].
- The OL-PVS has a 45° phase margin to ensure the stability of the CL-PVS [28].
- The crossing frequency should be as large as possible to improve the tracking accuracy.
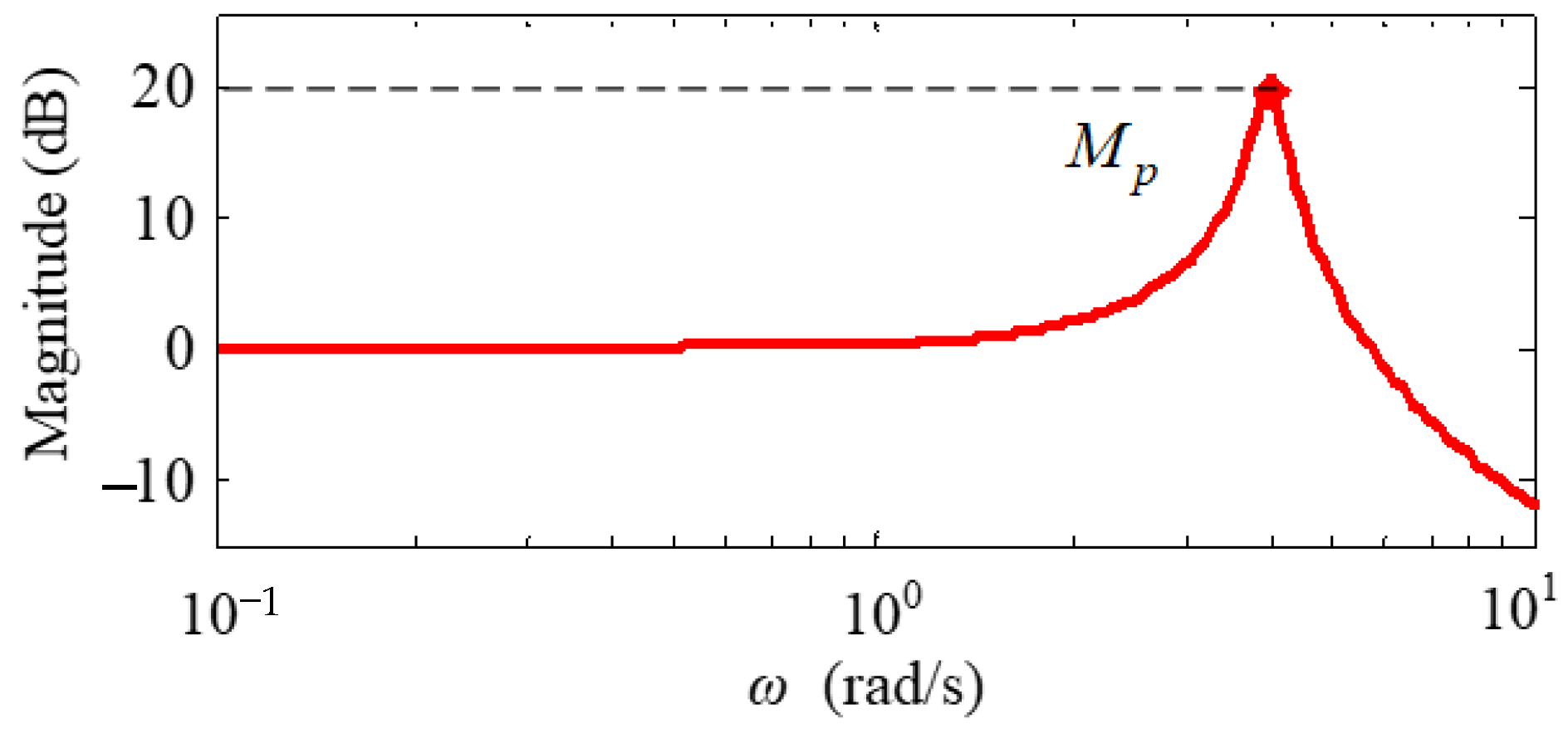
- Finally, a CL-PVS was formed by combining the pilot control model for the cruise phase and the equivalent motion model of the aircraft roll axis in the landing configuration in Equation (3). The amplitude–frequency response curve of the CL-PVS at the landing configuration switching instant is obtained, as shown in Figure 8. The maximum peak value is Mp = 19.6 dB.
3.2. Closed-Loop Aircraft Handling Response Parameters before and after Switch
4. Suggestions for Criteria to Evaluate Lateral-Directional PIOs Due to Landing Configuration Switch
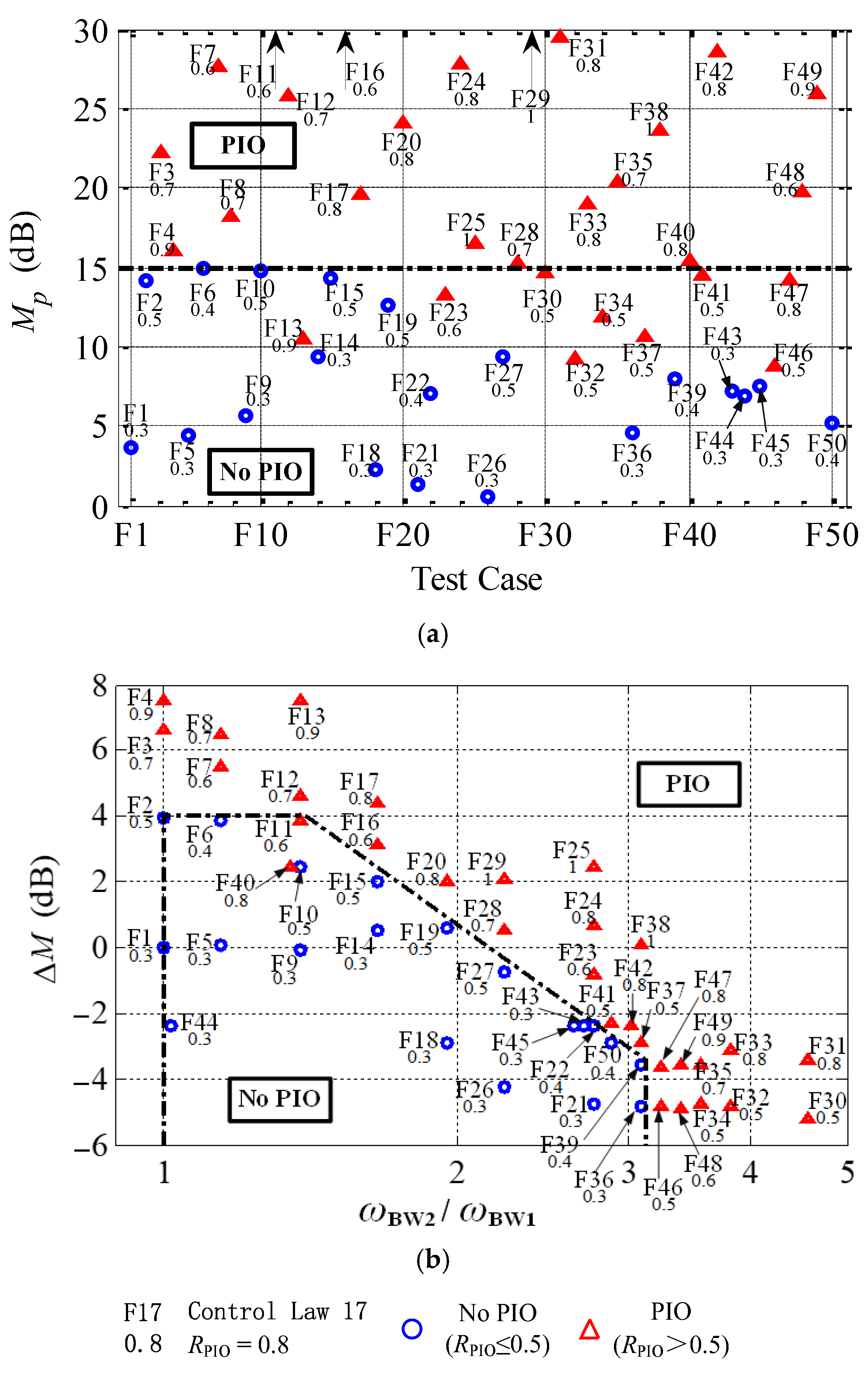
4.1. Requirements for Mp
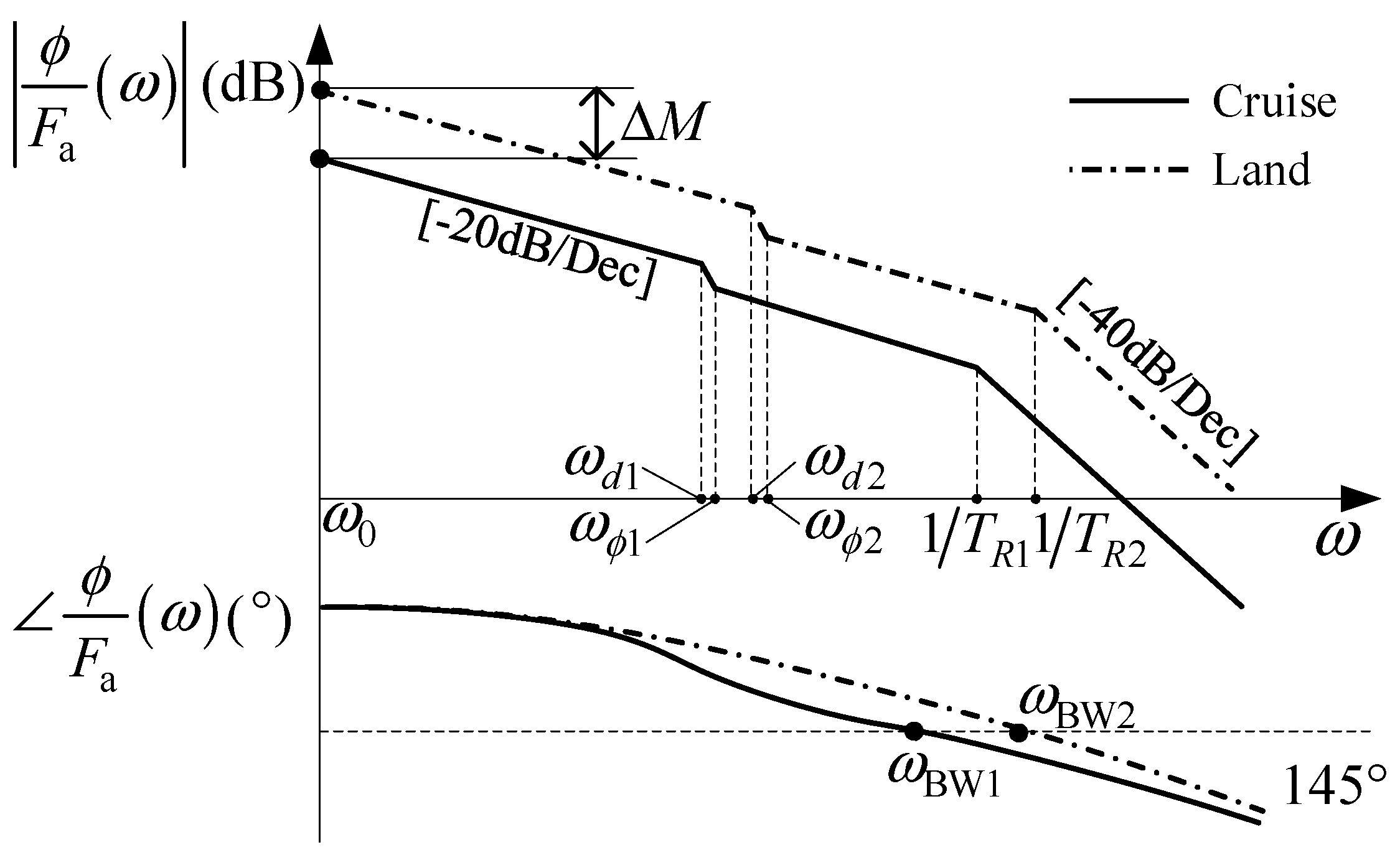
4.2. Requirements for ωBW2/ωBW1 and ΔM
- ωBW2/ωBW1 characterizes the differences in the roll axis manipulation sensitivity before and after the landing configuration switch. ωBW2/ωBW1 > 1, indicating that, after the configuration switch, the manipulation response of the aircraft roll axis is accelerated; otherwise, it slows. As shown in Figure 11b, before and after the configuration switch, the aircraft’s roll attitude bandwidth ωBW should not be increased too much, and a right boundary for the bandwidth ratio is needed, that is, ωBW2/ωBW1 ≤ 3.1. If the bandwidth increases significantly after switching, that is, ωBW2/ωBW1 is greater than 3.1, such as test cases F30 and F31, the aircraft roll handling response is accelerated. If the pilot cannot change the leading manipulation behaviour quickly, a large manipulation amplitude when tracking high-frequency commands after configuration switching may be adopted, resulting in a large tracking overshoot, and then the PIO phenomenon is induced.
- ΔM represents the differences in the rapidity of the roll axis handling response before and after the landing configuration switch. ΔM > 0 dB indicates that the manipulation sensitivity of the aircraft roll axis increases after configuration switching and conversely decreases. As shown in Figure 11b, when ωBW increases relatively little, i.e., 1 ≤ ωBW2/ωBW1 ≤ 1.3, it is also necessary to limit the increase in manipulation sensitivity, and the increase in manipulation sensitivity ΔM after switching should not exceed 4 dB. If ΔM increases substantially, such as in test cases F3, F7 and F12, the response amplitude of the aircraft roll attitude increases significantly under the same manoeuvring quantity, and then a large overshoot may be generated during closed-loop tracking, which makes accurate tracking difficult and leads to the PIO phenomenon.
- In addition, with the increase in bandwidth change amplitude after switching, the limit on the increase in manipulation sensitivity is increasingly strict. As shown in Figure 11b, by fitting the characteristic parameters of test cases F19, F22 and F50, the expression of the upper right boundary can be obtained:Equation (5) is the combined boundary formed by ΔM and ωBW2/ωBW1, which reflects the requirement of coordination between the change in response rapidity and manipulation sensitivity. If the upper right boundary is exceeded, the control bandwidth and manipulation sensitivity increase simultaneously after configuration switching. According to the analysis results in 1. and 2. above, an increase in control response rapidity and response amplitude will lead to an increase in overshoot in closed-loop tracking. The superposition effect caused by the simultaneous increase in the two factors may lead to a large increase in overshoot during closed-loop tracking and is thus prone to the PIO phenomenon.
5. Conclusions
- By analysing the digital test results of the lateral-directional PIO due to landing configuration switching and the formation mechanism of nonlinear PIOs, three characteristic parameters, namely the peak of the amplitude–frequency response of the CL-PVS at the switching instant, Mp, the ratio of the roll attitude bandwidth of the landing and cruise configurations, ωBW2/ωBW1, and the difference between the steady-state response of the roll attitude of the landing and cruise configurations, ΔM, are proposed to represent the difference in the lateral-directional dynamic characteristics of the aircraft before and after the landing configuration switch. They are also used to predict the characteristics of a lateral-directional PIO due to configuration switching.
- For the example aircraft, to avoid the lateral-directional PIO phenomenon after the landing configuration switch, Mp cannot exceed 15 dB, which reflects the tracking overshoot limit requirement at the switching instant. ωBW2/ωBW1 should be less than 3.1; that is, the increase in the roll attitude bandwidth should not be more than 3 times, which reflects the requirements for the response speed of the aircraft’s roll handling response. ΔM should not exceed 4 dB, indicating that the increase in the roll manipulation sensitivity should not exceed approximately 1.6 times. Further, |20lg(ωBW2/ωBW1)| + ΔM is no more than 6.5 dB, reflecting the requirements for coordination between changes in roll response rapidity and manipulation sensitivity.
- The research results have certain theoretical reference value for the analysis of the lateral-directional nonlinear PIO characteristics, flight quality assessment and flight control law optimization design of fly-by-wire civil aircraft during the approach phase. In the future, research on the criteria for Category III PIO phenomena induced by other factors can be carried out.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | ΔFa/ (N·s/°) | ξϕ (-) | ωϕ (rad/s) | ξd (-) | ωd (rad/s) | TR (s) | ωBW (rad/s) | τp (s) | Mp (dB) | (-) | ΔM (dB) | RPIO (-) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 3.6 | 1.0 | 0.0 | 0.3 |
| 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | |||||
| F2 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 14.2 | 1.0 | 3.9 | 0.5 |
| 1.4 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | |||||
| F3 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 22.3 | 1.0 | 6.6 | 0.7 |
| 1.0 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | |||||
| F4 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 16.1 | 1.0 | 7.5 | 0.9 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | |||||
| F5 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 4.5 | 1.1 | 0.1 | 0.3 |
| 1.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.59 | 1.70 | 0.008 | |||||
| F6 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 15.0 | 1.1 | 3.8 | 0.4 |
| 1.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.59 | 1.70 | 0.008 | |||||
| F7 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 27.5 | 1.1 | 5.5 | 0.6 |
| 1.0 | 0.45 | 1.0 | 0.45 | 1.0 | 0.59 | 1.70 | 0.008 | |||||
| F8 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 18.2 | 1.1 | 6.5 | 0.7 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.59 | 1.70 | 0.008 | |||||
| F9 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 5.7 | 1.4 | −0.1 | 0.3 |
| 1.6 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 2.04 | 0.008 | |||||
| F10 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 14.7 | 1.4 | 2.5 | 0.5 |
| 1.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 2.04 | 0.008 | |||||
| F11 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 31.9 | 1.4 | 3.9 | 0.6 |
| 1.0 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 2.04 | 0.008 | |||||
| F12 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 25.7 | 1.4 | 4.6 | 0.7 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 2.04 | 0.008 | |||||
| F13 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 10.4 | 1.4 | 7.5 | 0.9 |
| 0.7 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 2.04 | 0.008 | |||||
| F14 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 9.3 | 1.7 | 0.5 | 0.3 |
| 1.2 | 0.40 | 1.1 | 0.40 | 1.1 | 0.40 | 2.45 | 0.008 | |||||
| F15 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 14.3 | 1.7 | 2.0 | 0.5 |
| 1.1 | 0.40 | 1.1 | 0.40 | 1.1 | 0.40 | 2.45 | 0.008 | |||||
| F16 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 30.3 | 1.7 | 3.1 | 0.6 |
| 0.9 | 0.40 | 1.1 | 0.40 | 1.1 | 0.40 | 2.45 | 0.008 | |||||
| F17 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 19.6 | 1.7 | 4.4 | 0.8 |
| 0.8 | 0.40 | 1.1 | 0.40 | 1.1 | 0.40 | 2.45 | 0.008 | |||||
| F18 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 2.3 | 1.9 | −2.9 | 0.3 |
| 1.5 | 0.45 | 1.0 | 0.45 | 1.0 | 0.33 | 2.88 | 0.008 | |||||
| F19 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 12.6 | 1.9 | 0.6 | 0.5 |
| 1.0 | 0.45 | 1.0 | 0.45 | 1.0 | 0.33 | 2.88 | 0.008 | |||||
| F20 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.48 | 0.008 | 24.0 | 1.9 | 2.0 | 0.8 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.33 | 2.88 | 0.008 | |||||
| F21 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 1.3 | 2.8 | −4.7 | 0.3 |
| 1.3 | 0.25 | 1.1 | 0.25 | 1.0 | 0.29 | 2.57 | 0.036 | |||||
| F22 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 7.0 | 2.8 | −2.4 | 0.4 |
| 1.0 | 0.25 | 1.1 | 0.25 | 1.0 | 0.29 | 2.57 | 0.036 | |||||
| F23 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 13.2 | 2.8 | −0.8 | 0.6 |
| 0.8 | 0.25 | 1.1 | 0.25 | 1.0 | 0.29 | 2.57 | 0.036 | |||||
| F24 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 27.8 | 2.8 | 0.6 | 0.8 |
| 0.7 | 0.25 | 1.1 | 0.25 | 1.0 | 0.29 | 2.57 | 0.036 | |||||
| F25 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 16.4 | 2.8 | 2.4 | 1.0 |
| 0.6 | 0.25 | 1.1 | 0.25 | 1.0 | 0.29 | 2.57 | 0.036 | |||||
| F26 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 0.6 | 2.2 | −4.2 | 0.3 |
| 1.5 | 0.40 | 1.0 | 0.40 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F27 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 9.3 | 2.2 | −0.7 | 0.5 |
| 1.0 | 0.40 | 1.0 | 0.40 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F28 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 15.2 | 2.2 | 0.5 | 0.7 |
| 0.9 | 0.40 | 1.0 | 0.40 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F29 | 2.2 | 0.65 | 1.0 | 0.65 | 1.0 | 0.67 | 1.48 | 0.008 | 35.1 | 2.2 | 2.1 | 1.0 |
| 0.7 | 0.40 | 1.0 | 0.40 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F30 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.43 | 0.72 | 0.008 | 14.6 | 4.6 | −5.2 | 0.5 |
| 0.8 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F31 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.43 | 0.72 | 0.008 | 29.5 | 4.6 | −3.4 | 0.8 |
| 0.7 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F32 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.18 | 0.87 | 0.008 | 9.2 | 3.8 | −4.9 | 0.5 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F33 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.18 | 0.87 | 0.008 | 18.9 | 3.8 | −3.1 | 0.8 |
| 0.8 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F34 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.00 | 1.00 | 0.008 | 11.9 | 3.5 | −4.8 | 0.5 |
| 0.9 | 0.45 | 0.9 | 0.45 | 1.0 | 0.29 | 3.55 | 0.008 | |||||
| F35 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.00 | 1.00 | 0.008 | 20.3 | 3.5 | −3.6 | 0.7 |
| 0.8 | 0.45 | 0.9 | 0.45 | 1.0 | 0.29 | 3.55 | 0.008 | |||||
| F36 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.95 | 1.07 | 0.008 | 4.6 | 3.1 | −4.8 | 0.3 |
| 1.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F37 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.95 | 1.07 | 0.008 | 10.6 | 3.1 | −2.9 | 0.5 |
| 0.9 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F38 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.95 | 1.07 | 0.008 | 23.5 | 3.1 | 0.0 | 1.0 |
| 0.7 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F39 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.95 | 1.07 | 0.008 | 8.0 | 3.1 | −3.6 | 0.4 |
| 1.0 | 0.45 | 1.0 | 0.45 | 1.0 | 0.29 | 3.31 | 0.008 | |||||
| F40 | 2.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.67 | 1.41 | 0.023 | 15.3 | 1.3 | 2.5 | 0.8 |
| 1.2 | 0.45 | 1.0 | 0.45 | 1.0 | 0.48 | 1.91 | 0.023 | |||||
| F41 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 14.4 | 2.9 | −2.3 | 0.5 |
| 0.8 | 0.25 | 1.0 | 0.25 | 1.0 | 0.29 | 2.69 | 0.036 | |||||
| F42 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 28.5 | 3.0 | −2.4 | 0.8 |
| 0.7 | 0.25 | 0.9 | 0.25 | 1.0 | 0.29 | 2.82 | 0.036 | |||||
| F43 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 1.00 | 0.93 | 0.038 | 7.3 | 2.7 | −2.4 | 0.3 |
| 1.0 | 0.45 | 1.1 | 0.45 | 1.0 | 0.29 | 2.51 | 0.036 | |||||
| F44 | 2.2 | 0.25 | 0.5 | 0.25 | 0.5 | 1.00 | 0.93 | 0.038 | 6.9 | 1.0 | −2.4 | 0.3 |
| 1.0 | 0.10 | 1.1 | 0.10 | 1.0 | 0.29 | 0.95 | 0.036 | |||||
| F45 | 2.2 | 0.65 | 0.5 | 0.65 | 0.5 | 1.00 | 0.93 | 0.038 | 7.5 | 2.6 | −2.4 | 0.3 |
| 1.0 | 0.65 | 1.1 | 0.65 | 1.0 | 0.29 | 2.45 | 0.036 | |||||
| F46 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.91 | 1.10 | 0.008 | 8.8 | 3.2 | −4.9 | 0.5 |
| 1.0 | 0.45 | 0.9 | 0.45 | 1.0 | 0.29 | 3.55 | 0.008 | |||||
| F47 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.91 | 1.10 | 0.008 | 14.1 | 3.2 | −3.7 | 0.8 |
| 0.9 | 0.45 | 0.9 | 0.45 | 1.0 | 0.29 | 3.55 | 0.008 | |||||
| F48 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.91 | 1.10 | 0.008 | 19.7 | 3.4 | −5.0 | 0.6 |
| 0.8 | 0.45 | 0.8 | 0.45 | 1.0 | 0.29 | 3.72 | 0.008 | |||||
| F49 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.91 | 1.10 | 0.008 | 25.9 | 3.4 | −3.6 | 0.9 |
| 0.7 | 0.45 | 0.8 | 0.45 | 1.0 | 0.29 | 3.72 | 0.008 | |||||
| F50 | 2.2 | 0.45 | 0.5 | 0.45 | 0.5 | 0.95 | 1.07 | 0.008 | 5.1 | 2.9 | −2.9 | 0.4 |
| 1.1 | 0.45 | 1.1 | 0.45 | 1.0 | 0.29 | 3.09 | 0.008 |
References
- Endres, G.G.; Gething, M.J. Jane’s Aircraft Recognition Guide, 5th ed.; Harper Collins: New York, NY, USA, 2007; pp. 1–250. [Google Scholar]
- Holzaepfel, F.; Strauss, L.; Schwarz, C. Assessment of Dynamic Pairwise Wake Vortex Separations for Approach and Landing at Vienna Airport. Aerosp. Sci. Technol. 2021, 112, 106618. [Google Scholar] [CrossRef]
- Hameeda, A.S.; Bindu, G.R. Single Segment Approach and Landing Guidance and Control for an Unpowered Reusable Launch Vehicle. Aerosp. Sci. Technol 2021, 115, 106777. [Google Scholar] [CrossRef]
- Etkin, B.; Reid, L.D. Dynamics of Flight Stability and Control, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1996; pp. 93–160. [Google Scholar]
- Fang, Z.; Chen, W.; Zhang, S. Aircraft Flight Dynamics, 1st ed.; Beihang University Press: Beijing, China, 2005; pp. 254–263. (In Chinese) [Google Scholar]
- Iloputaife, O. Minimizing Pilot-induced-oscillation Susceptibility during C-17 Development. In Proceedings of the 22nd Atmospheric Flight Mechanics Conference, New Orleans, LA, USA, 11–13 August 1997. [Google Scholar] [CrossRef]
- Hyokawa, S.; Ueba, M. Design and Verification of Short-Distance Landing Control System for a One-Third-Scale Unmanned Supersonic Experimental Airplane. Aerospace 2023, 10, 334. [Google Scholar] [CrossRef]
- Xu, S.; Tan, W.; Qu, X.; Zhang, C. Prediction of Nonlinear Pilot-induced Oscillation Using an Intelligent Human Pilot Model. Chin. J. Aeronaut. 2019, 32, 2592–2611. [Google Scholar] [CrossRef]
- Pavel, M.D.; Jump, M.; Dang-Vu, B.; Masarati, P.; Gennaretti, M.; Ionita, A.; Zaichik, L.; Smaili, H.; Quaranta, G.; Yilmaz, D.; et al. Adverse Rotorcraft Pilot Couplings: Past, Present and Future Challenges. Prog. Aerosp. Sci. 2013, 62, 1–51. [Google Scholar] [CrossRef]
- Hassan, A.M.; Taha, H.E. Airplane Loss of Control Problem: Linear Controllability Analysis. Prog. Aerosp. Sci. 2016, 55, 264–271. [Google Scholar] [CrossRef]
- Mandal, T.K.; Gu, Y. Analysis of Pilot-Induced-Oscillation and Pilot Vehicle System Stability Using UAS Flight Experiments. Aerospace 2016, 3, 42. [Google Scholar] [CrossRef]
- Drewiacki, D.; Silvestre, F.J.; Neto, A.G. Influence of Airframe Flexibility on Pilot-induced Oscillations. J. Guid. Control Dyn. 2019, 42, 7. [Google Scholar] [CrossRef]
- Shweyk, K.; Weltz, G. Design and Validation of Flight Control Law Changes Intended to Minimize Pilot-induced Oscillations in a Large Transport Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005. [Google Scholar] [CrossRef]
- Bailey, R.E.; Bidlack, T.J. A Quantitative Criterion for Pilot-induced Oscillations: Time Domain Neal-smith Criterion. In Proceedings of the 21st Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 29–31 July 1996. [Google Scholar] [CrossRef]
- Innocenti, M.; Thukral, A. Roll-performance Criteria for High Augmented Aircraft. J. Guid. Control Dyn. 1991, 14, 1277–1286. [Google Scholar] [CrossRef]
- Jones, M.; Alexander, M.; Höfinger, M.; Barnett, M.; Comeau, P.; Gubbels, A. In-Flight Test Campaign to Validate PIO Detection and Assessment Tools. Aerospace 2020, 7, 136. [Google Scholar] [CrossRef]
- Wang, L.; Lu, C.; Liu, H.; Yue, T. Method of Predicting Nonlinear Pilot-induced Oscillations Due to Flight Control Degradation Based on Digital Virtual Flight. Aerosp. Sci. Technol. 2021, 116, 106871. [Google Scholar] [CrossRef]
- Liu, F.; Wang, L.; Tan, X. Digital Virtual Flight Testing and Evaluation Method for Flight Characteristics Airworthiness Compliance of Civil Aircraft Based on HQRM. Chin. J. Aeronaut. 2015, 28, 112–120. [Google Scholar] [CrossRef]
- Wang, L.; Yin, H.; Yang, K.; Liu, H.; Zhu, J. Water Takeoff Performance Calculation Method for Amphibious Aircraft Based on Digital Virtual Flight. Chin. J. Aeronaut. 2020, 33, 3082–3091. [Google Scholar] [CrossRef]
- Gao, J.; Li, L.; Feng, Y. Aircraft Handling Qualities, 1st ed.; National Defense Industry Press: Beijing, China, 2003; pp. 146–153. (In Chinese) [Google Scholar]
- Favre, C. Fly-by-wire for Commercial Aircraft: The Airbus Experience. Int. J. Control 1994, 59, 139–157. [Google Scholar] [CrossRef]
- Federal Aviation Administration. FAR Part 25: Air-Worthiness Standards: Transport Category Airplanes; Federal Aviation Administration: Washington, DC, USA, 1964; pp. 26–28.
- Zaal, P.; Sweet, B. Estimation of Time Varying Pilot Model Parameters. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar] [CrossRef]
- Mitchell, D.G.; Hoh, R.H.; Aponso, B.L. Proposed Incorporation of Mission-oriented Flying Qualities into MIL-STD-1797A; Wright Laboratory, Hoh Aeronautics, Inc.: Lomita, CA, USA, 1994. [Google Scholar]
- MIL-HDBK-1797A; Flying Qualities of Piloted Aircraft. Military Standard. Department of Defense: Arlington, VA, USA, 2004.
- Innocenti, M.; Bava, R. Lateral-direction Tracking Requirements from Simulation Data. J. Guid. Control Dyn. 1991, 14, 701–703. [Google Scholar] [CrossRef]
- Meng, Q. Automatic Control Theory, 2nd ed.; Higher Education Press: Beijing, China, 2008; pp. 11–30. (In Chinese) [Google Scholar]
- Martz, J.; Biezad, D.J.; DiDominico, E.D. Loop Separation Parameter-A New Metric for Landing Flying Qualities. J. Guid. Control Dyn. 1988, 11, 535–541. [Google Scholar] [CrossRef]












| No. | ωi (rad/s) | Ai (rad) | No. | ωi (rad/s) | Ai (rad) |
|---|---|---|---|---|---|
| 1 | 0.262 | 2.970 | 8 | 2.618 | 0.155 |
| 2 | 0.524 | 1.474 | 9 | 3.142 | 0.120 |
| 3 | 0.785 | −0.890 | 10 | 3.927 | 0.098 |
| 4 | 1.047 | 0.575 | 11 | 5.236 | −0.055 |
| 5 | 1.309 | 0.393 | 12 | 7.854 | 0.035 |
| 6 | 1.571 | 0.348 | 13 | 10.470 | 0.028 |
| 7 | 2.094 | −0.235 | 14 | 15.710 | −0.010 |
| No. | Parameter | Configuration | |
|---|---|---|---|
| Cruise | Landing | ||
| 1 | ΔFa/ (N·s/°) | 2.20 | 0.80 |
| 2 | Tw (s) | 3 | 3 |
| 3 | τact (s) | 0.3 | 0.3 |
| 4 | KIa | 0.39 | 0.39 |
| 5 | Kfa | 0.10 | 0.10 |
| 6 | KIr | 0.02 | 0.02 |
| 7 | Kfr | 0.02 | 0.02 |
| 8 | Kny | 1.97 | 2.20 |
| 9 | Kr | 0.14 | 0.01 |
| 10 | Kp | −0.26 | −0.19 |
| No. | Parameter | Configuration | |
|---|---|---|---|
| Cruise | Landing | ||
| 1 | ξϕ | 0.65 | 0.40 |
| 2 | ωϕ (rad/s) | 1.0 | 1.1 |
| 3 | TR (s) | 0.67 | 0.40 |
| 4 | ξd | 0.65 | 0.40 |
| 5 | ωd (rad/s) | 1.0 | 1.1 |
| 6 | ωBW (rad/s) | 1.48 | 2.45 |
| 7 | τp (s) | 0.008 | 0.008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lu, C.; Jin, T.; Liu, H.; Yue, T. Suggestions for Criteria to Evaluate Lateral-Directional Nonlinear Pilot-Induced Oscillations Due to Fly-by-Wire Civil Aircraft Landing Configuration Switch. Aerospace 2023, 10, 799. https://doi.org/10.3390/aerospace10090799
Wang L, Lu C, Jin T, Liu H, Yue T. Suggestions for Criteria to Evaluate Lateral-Directional Nonlinear Pilot-Induced Oscillations Due to Fly-by-Wire Civil Aircraft Landing Configuration Switch. Aerospace. 2023; 10(9):799. https://doi.org/10.3390/aerospace10090799
Chicago/Turabian StyleWang, Lixin, Chang Lu, Tao Jin, Hailiang Liu, and Ting Yue. 2023. "Suggestions for Criteria to Evaluate Lateral-Directional Nonlinear Pilot-Induced Oscillations Due to Fly-by-Wire Civil Aircraft Landing Configuration Switch" Aerospace 10, no. 9: 799. https://doi.org/10.3390/aerospace10090799
APA StyleWang, L., Lu, C., Jin, T., Liu, H., & Yue, T. (2023). Suggestions for Criteria to Evaluate Lateral-Directional Nonlinear Pilot-Induced Oscillations Due to Fly-by-Wire Civil Aircraft Landing Configuration Switch. Aerospace, 10(9), 799. https://doi.org/10.3390/aerospace10090799