
Research on Passenger Evacuation Behavior in Civil Aircraft Demonstration Experiments Based on Neural Networks and Modeling


Abstract
:1. Introduction
2. Civil Aircraft Emergency Evacuation Simulation Experiment
3. Establishing a Social Force Simulation Model and Training a BP Neural Network
3.1. Simulation Study Based on the Social Force Model
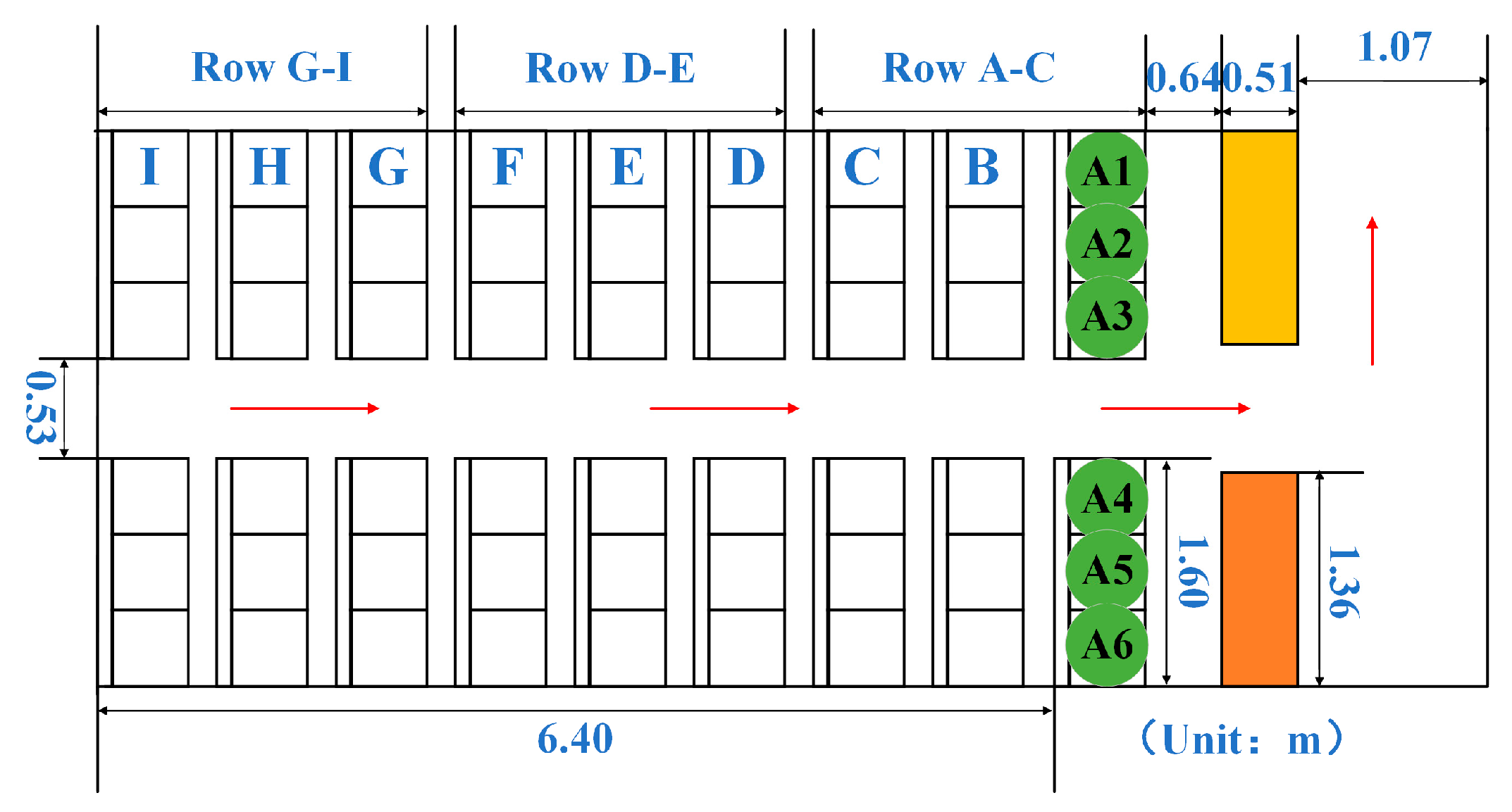
3.1.1. Designing the Simulation Model Layout
3.1.2. Parameter Setting Based on the Social Force Model
3.2. Simulation Study Based on the BP Neural Network
3.2.1. Extracting Feature Data
3.2.2. Establishing a BP Neural Network Model
4. Results and Analysis
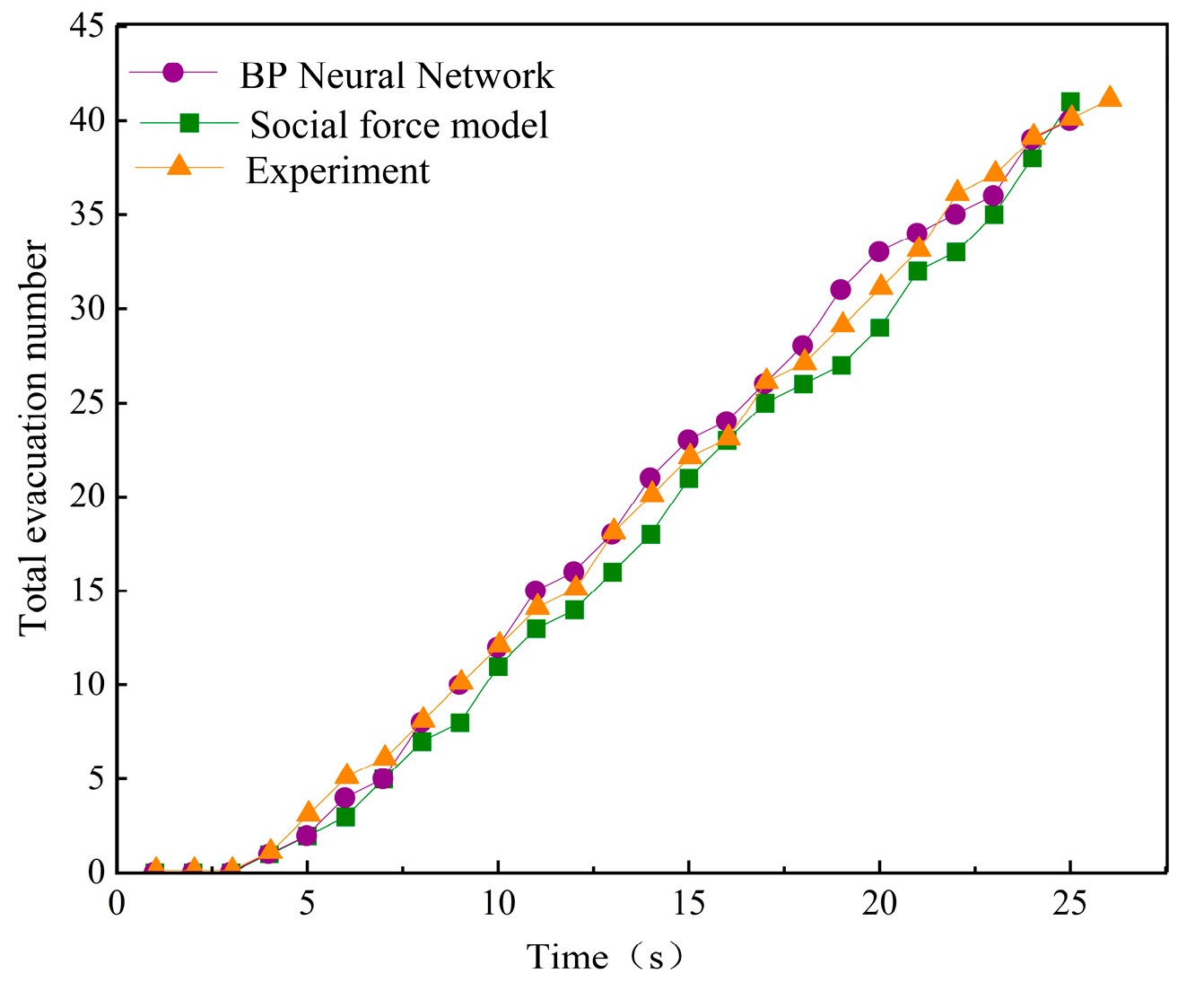
4.1. Evacuation Time of Passengers
4.2. Priority of Main Aisles
4.3. The Bottleneck Distribution in the Main Aisle
5. Summary and Discussion
- Both the BP neural network model and the social force model have high accuracy in predicting evacuation time.
- Compared to the social force simulation model, the BP neural network has a more similar distribution of main aisle priority.
- BP neural networks can better demonstrate the evolution law of experimental bottlenecks, especially in regions 3–7. By comparing the evolution law of bottleneck centers and the relative error, e, it can be found that the BP neural network is more realistic in predicting the main bottleneck, with a smaller difference from the experiment.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Shi, T.; Li, N. Pedestrian evacuation simulation in indoor emergency situations: Approaches, models and tools. Saf. Sci. 2021, 142, 105378. [Google Scholar] [CrossRef]
- Zhang, Z.; Fu, D. Modeling pedestrian–vehicle mixed-flow in a complex evacuation scenario. Phys. A Stat. Mech. Its Appl. 2022, 599, 127468. [Google Scholar] [CrossRef]
- Xu, H.-H.; Guo, R.-Y. Passenger emergency evacuation from bus carriage: Results from realistic data and modeling simulations. J. Manag. Sci. Eng. 2022, 7, 530–549. [Google Scholar] [CrossRef]
- Fang, S.; Liu, Z.; Wang, X.; Wang, J.; Yang, Z. Simulation of evacuation in an inclined passenger vessel based on an improved social force model. Saf. Sci. 2022, 148, 105675. [Google Scholar] [CrossRef]
- Fathianpour, A.; Evans, B.; Jelodar, M.B.; Wilkinson, S. Tsunami evacuation modelling via micro-simulation model. Prog. Disaster Sci. 2023, 17, 100277. [Google Scholar] [CrossRef]
- Liu, J.; Jia, Y.; Mao, T.; Wang, Z. Modeling and simulation analysis of crowd evacuation behavior under terrorist attack. Phys. A Stat. Mech. Its Appl. 2022, 604, 127891. [Google Scholar] [CrossRef]
- Chang, K.-H.; Wu, Y.-Z.; Ke, S.-S. A simulation-based decision support tool for dynamic post-disaster pedestrian evacuation. Decis. Support Syst. 2022, 157, 113743. [Google Scholar] [CrossRef]
- Ren, X.; Hu, Y.; Li, H.; Zhang, J.; Song, W.; Xu, H. Simulation of building evacuation with different ratios of the elderly considering the influence of obstacle position. Phys. A Stat. Mech. Its Appl. 2022, 604, 127833. [Google Scholar] [CrossRef]
- Makinoshima, F.; Oishi, Y.; Imamura, F. Mechanism of an evacuation cascade during the 2011 Tohoku tsunami inferred from an evacuation simulation incorporating communications in social networks. Int. J. Disaster Risk Reduct. 2022, 71, 102810. [Google Scholar] [CrossRef]
- Pan, X. Computational modeling of human and social behaviors for emergency egress analysis. Diss. Abstr. Int. 2006, 67, 448–461. [Google Scholar]
- Huang, S.; Lu, S.; Lo, S.; Li, C.; Guo, Y. Experimental study on occupant evacuation in narrow seat aisle. Phys. A Stat. Mech. Its Appl. 2018, 502, 506–517. [Google Scholar] [CrossRef]
- Helbing, D.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef] [PubMed]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487–490. [Google Scholar] [CrossRef] [PubMed]
- Helbing, D.; Johansson, A. Pedestrian, crowd, and evacuation dynamics. Encycl. Complex. Syst. Sci. 2013, 16, 697–716. [Google Scholar]
- Rudloff, C.; Matyus, T.; Seer, S.; Bauer, D. Can Walking Behavior be Predicted? Analysis of Calibration and Fit of Pedestrian Models. Transp. Res. Rec. J. Transp. Res. Board 2011, 2264, 101–109. [Google Scholar] [CrossRef]
- Kretz, T. On oscillations in the social force model. Phys. A Stat. Mech. Its Appl. 2015, 438, 272–285. [Google Scholar] [CrossRef]
- Marlow, F.; Jacob, J.; Sagaut, P. A multidisciplinary model coupling Lattice-Boltzmann-based CFD and a Social Force Model for the simulation of pollutant dispersion in evacuation situations. J. Affect. Disord. 2021, 205, 108212. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, H. Crowd evacuation simulation method combining the density field and social force model. Phys. A Stat. Mech. Its Appl. 2020, 566, 125652. [Google Scholar] [CrossRef]
- Han, Y.; Liu, H. Modified social force model based on information transmission toward crowd evacuation simulation. Phys. A Stat. Mech. Its Appl. 2017, 469, 499–509. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, R.; Pan, F.; Yang, Y.; Li, Y.; Yang, X. Stochastic user equilibrium path planning for crowd evacuation at subway station based on social force model. Phys. A Stat. Mech. Its Appl. 2022, 594, 127033. [Google Scholar] [CrossRef]
- Zhou, R.; Cui, Y.; Wang, Y.; Jiang, J. A modified social force model with different categories of pedestrians for subway station evacuation. Tunn. Undergr. Space Technol. 2021, 110, 103837. [Google Scholar] [CrossRef]
- Quagliarini, E.; Bernardini, G.; Romano, G.; D’Orazio, M. Simplified flood evacuation simulation in outdoor built environments. Preliminary comparison between setup-based generic software and custom simulator. Sustain. Cities Soc. 2022, 81, 103848. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, T.; Luh, P.B.; Zhang, H. Modified Social Force Model Based on Predictive Collision Avoidance Considering Degree of Competitiveness. Fire Technol. 2016, 53, 331–351. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, J.; Shang, Z.; Fan, M.; Song, W. The effect of obstacle layouts on regulating luggage-laden pedestrian flow through bottlenecks. Phys. A Stat. Mech. Its Appl. 2022, 608, 128255. [Google Scholar] [CrossRef]
- Chen, H.; Wang, Y.; Wang, J.; Li, H.; Jiang, J.; Ni, L.; Zhou, R. Effect of S-shaped guardrails on pedestrian crowd flows in bottleneck areas. Saf. Sci. 2023, 159, 106020. [Google Scholar] [CrossRef]
- Li, N.; Guo, R.-Y. Simulation of bi-directional pedestrian flow through a bottleneck: Cell transmission model. Phys. A Stat. Mech. Its Appl. 2020, 555, 124542. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Song, W.; Yuen, K.K.R. A comparative study on the bottleneck pedestrian flow under different movement motivations. Fire Saf. J. 2020, 120, 103014. [Google Scholar] [CrossRef]
- National Transportation Safety Board. Safety Aspects of Emergency Evacuations from Air Carrier Aircraft. In Special Study NTSB/AAS-74/03; NTSB: Washington, DC, USA, 1974. [Google Scholar]
- Muir, H.; Cobbett, A. Aircraft Evacuation Tests—An Initial Assessment of the Influence of Various Aisle Configurations and Lighting Conditions under Different Evacuation Scenarios; Transportation Development Center: Montreal, QC, Canada, 1996.
- National Transportation Safety Board. Emergency Evacuation of Commercial Airplanes; NTSB: Washington, DC, USA, 2000.
- McLean, G.A. Access-to-egress: A meta-analysis of the factors that control emergency evacuation through the transport airplane type-III overwing exit. Aviat. Saf. 2001, 30, 15–26. [Google Scholar]
- McLean, G.A.; Corbett, C.L. Access-to Egress III: Repeated Measurement of Factors That Control the Emergency Evacuation of Passengers through the Transport Airplane Type-III Overwing Exit; DOT/FAA/AM-04/2; FAA: Washington, DC, USA, 2004.
- Federal Aviation Regulations. Part 25-Airworthiness Standards: Transport Category Airplanes; Federal Aviation Administration (FAA): Washington, DC, USA, 1989; p. 86.
- Zhang, J.; Klingsch, W.; Schadschneider, A.; Seyfried, A. Transitions in pedestrian fundamental diagrams of straight corridors and T-junctions. J. Stat. Mech. Theory Exp. 2011, 2011, P06004. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Size (m) | Variable | Size (m) |
|---|---|---|---|
| L0 | 0.10 | H0 | 0.53 |
| L1 | 1.07 | H1 | 1.60 |
| L2 | 0.51 | H2 | 1.11 |
| L3 | 1.14 | H3 | 1.31 |
| L4 | 0.80 | XS, YS | 9.22, 3.63 |
| Parameters | Setting | |
|---|---|---|
| Number of passengers (people) | 54 | |
| Passenger weight (kg) | 60 ± 15 | |
| Body projection diameter (m) | Normal distribution With a mean of 0.33 and a variance of 0.05 | |
| Force intensity, expected distance to maintain (m) | Wall | 2.40, 0.50 |
| Seat to main aisle | 3.00, 0.08 | |
| Main aisle to front of cabin | 2.00, 0.50 | |
| Emergency exit | 3.00, 0.08 | |
| Force range (m) | Range of force from other passengers | 0.50 |
| Range of force from obstacles in the cabin | 0.30 | |
| Expected speed (m/s) | Seat and back half of main aisle | 0.65 ± 0.20 |
| Emergency exit, front half of main Aisle, and partitioned areas | 1.00 ± 0.20 | |
| Maximum speed (m/s) | 1.60 | |
| Elasticity coefficient (N/m) | 28,000 | |
| Sliding friction force (N/m) | 14,000 | |
| Reaction time (s) | 0.3 ± 0.2 | |
| Relaxation time (s) | 0.5 | |
| Parameters | Settings |
|---|---|
| Learning rate | 0.02 |
| Input layer neurons | 7 |
| Output layer neurons | 4 |
| Two hidden layers | [10, 20] |
| Number of training iterations | 1000 |
| Target accuracy | 10−6 |
| Number | Experimental and Calculation Models | Total Evacuation Time (T)/s |
|---|---|---|
| 1 | E | 33.6 |
| S | 30.1 | |
| N | 32.9 | |
| 2 | E | 32.5 |
| S | 30.4 | |
| N | 32.6 |
| 1 | 2 | |||||
|---|---|---|---|---|---|---|
| E | S | N | E | S | N | |
| A1 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| A2 | 0.16 | 0.00 | 0.23 | 0.00 | 0.04 | 0.00 |
| A3 | 0.43 | 0.16 | 0.42 | 0.09 | 0.18 | 0.09 |
| A4 | 0.49 | 0.32 | 0.45 | 0.28 | 0.33 | 0.30 |
| A5 | 0.51 | 0.32 | 0.33 | 0.33 | 0.42 | 0.32 |
| A6 | 0.43 | 0.42 | 0.38 | 0.26 | 0.43 | 0.25 |
| A7 | 0.45 | 0.51 | 0.37 | 0.43 | 0.52 | 0.40 |
| A8 | 0.21 | 0.40 | 0.22 | 0.21 | 0.32 | 0.09 |
| 0.34 | 0.27 | 0.30 | 0.20 | 0.28 | 0.18 | |
| e | 0 | 20% | 12% | 0 | 40% | 10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Z.; You, Q.; Chen, K.; Song, H.; Peng, H. Research on Passenger Evacuation Behavior in Civil Aircraft Demonstration Experiments Based on Neural Networks and Modeling. Aerospace 2024, 11, 221. https://doi.org/10.3390/aerospace11030221
Feng Z, You Q, Chen K, Song H, Peng H. Research on Passenger Evacuation Behavior in Civil Aircraft Demonstration Experiments Based on Neural Networks and Modeling. Aerospace. 2024; 11(3):221. https://doi.org/10.3390/aerospace11030221
Chicago/Turabian StyleFeng, Zhenyu, Qianqian You, Kun Chen, Houjin Song, and Haoxuan Peng. 2024. "Research on Passenger Evacuation Behavior in Civil Aircraft Demonstration Experiments Based on Neural Networks and Modeling" Aerospace 11, no. 3: 221. https://doi.org/10.3390/aerospace11030221
APA StyleFeng, Z., You, Q., Chen, K., Song, H., & Peng, H. (2024). Research on Passenger Evacuation Behavior in Civil Aircraft Demonstration Experiments Based on Neural Networks and Modeling. Aerospace, 11(3), 221. https://doi.org/10.3390/aerospace11030221