
Combination of Advanced Actuator Line/Disk Model and High-Order Unstructured Finite Volume Solver for Helicopter Rotors


Abstract
:1. Introduction
2. Numerical Methodology
2.1. Flow Solver
2.1.1. Governing Equations
2.1.2. Spatial and Temporal Discretization
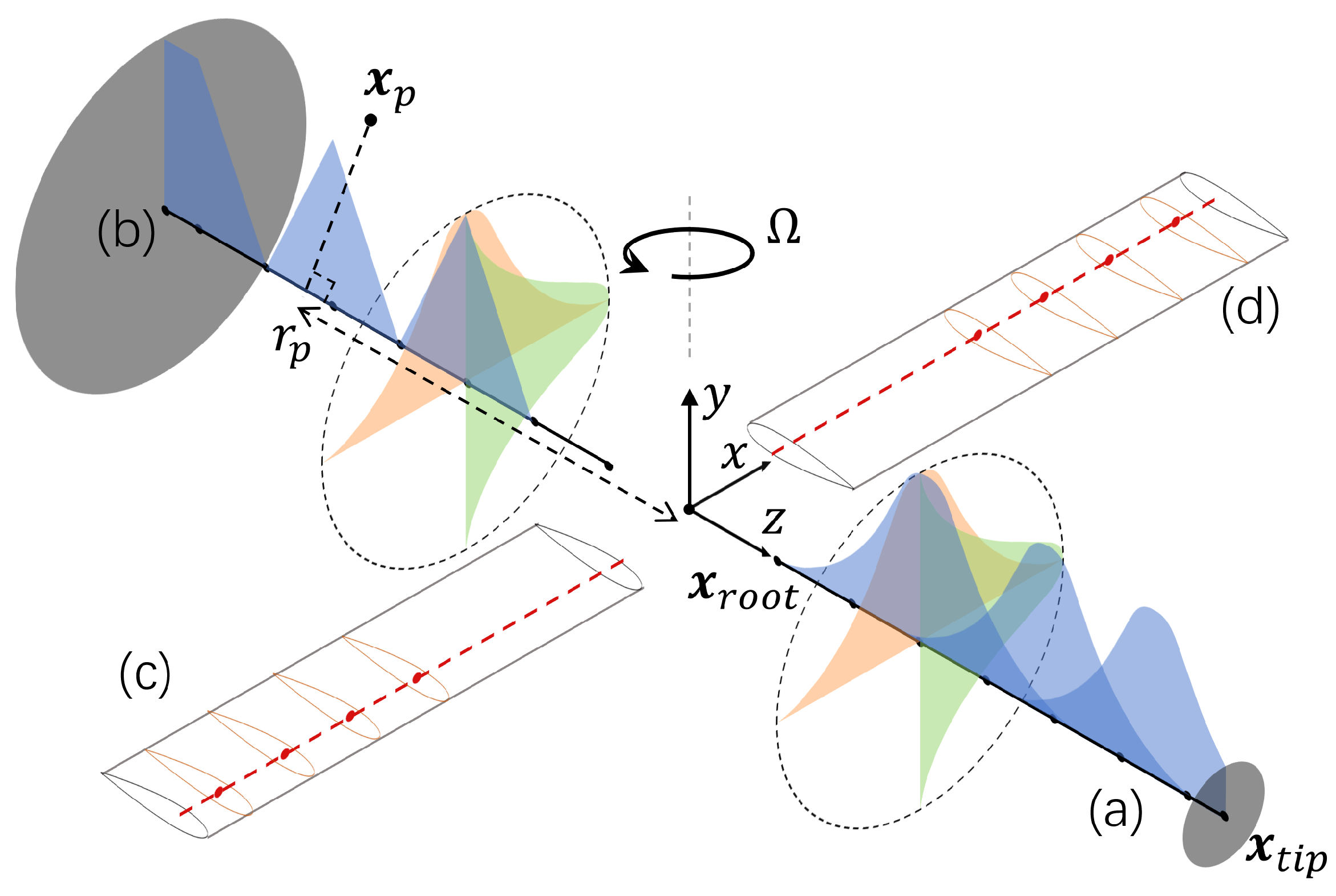
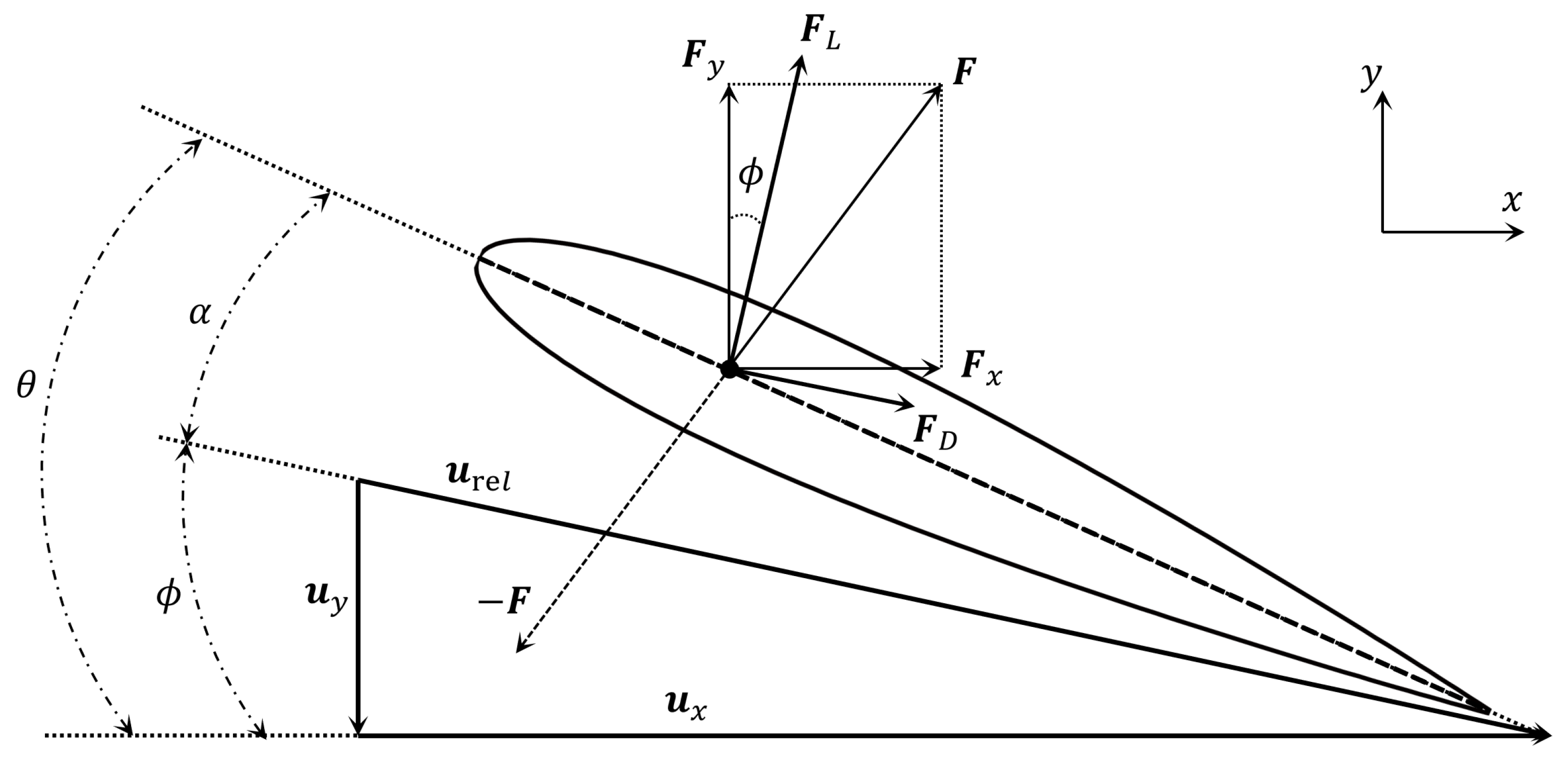
2.2. Advanced Actuator Line/Disk Modeling
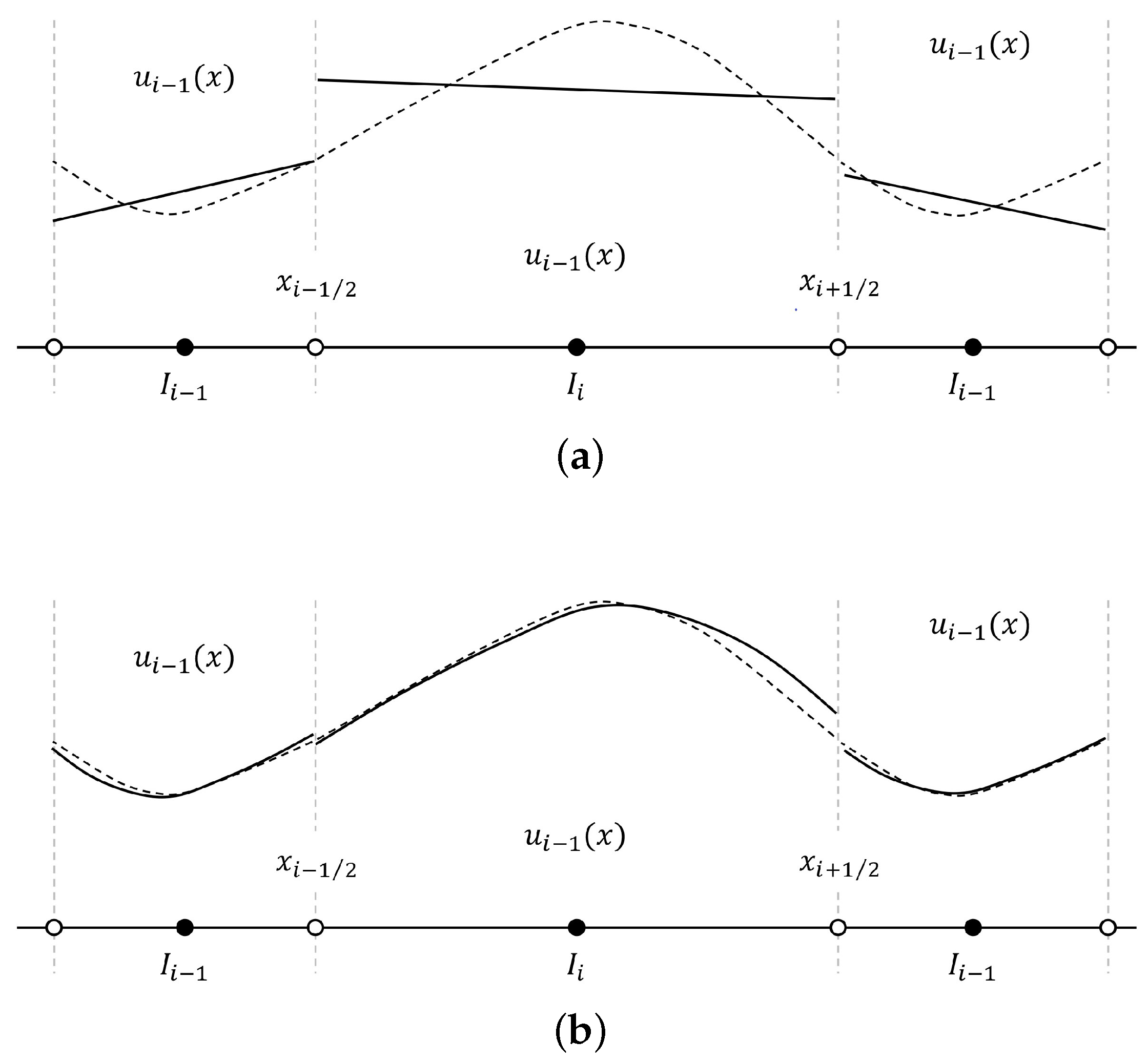
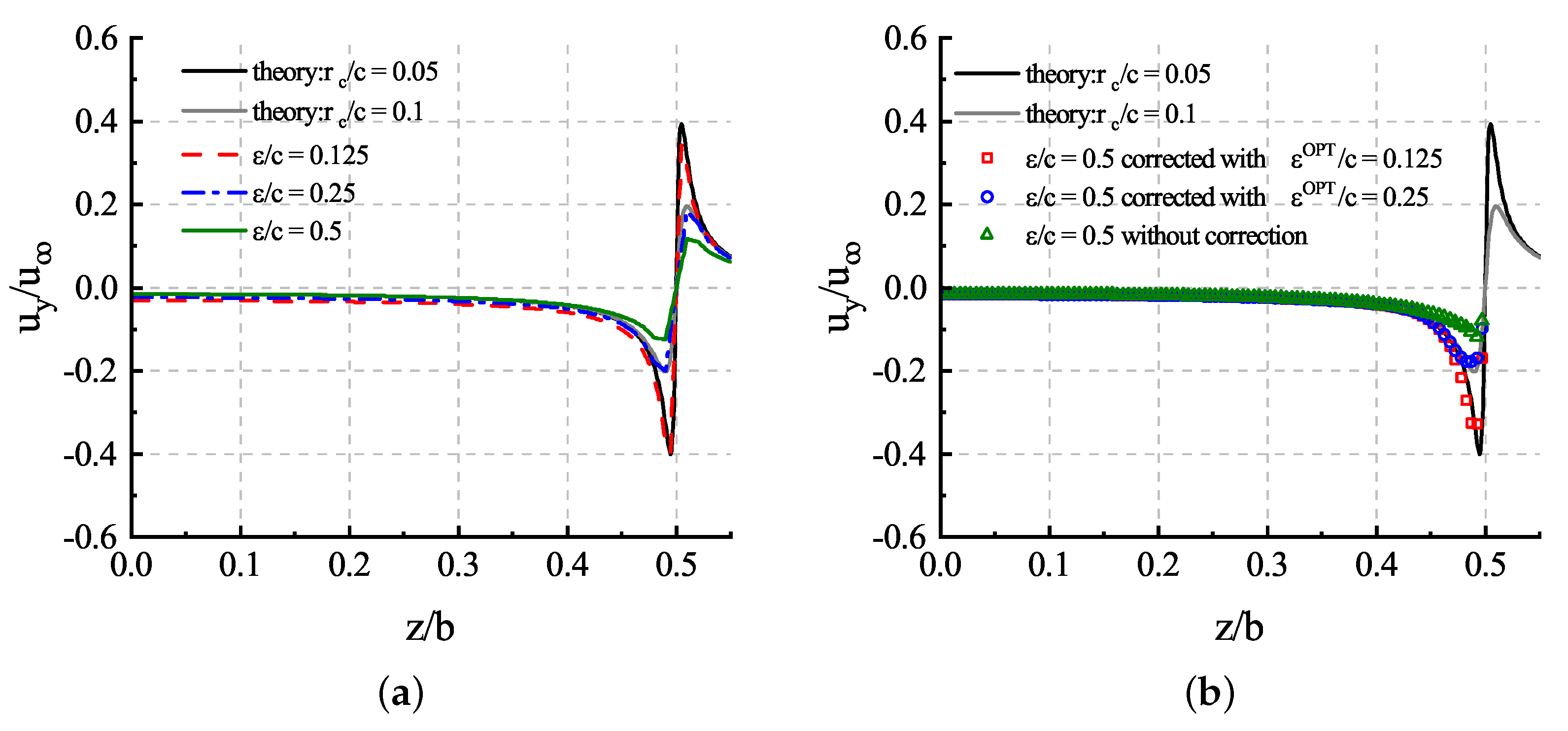
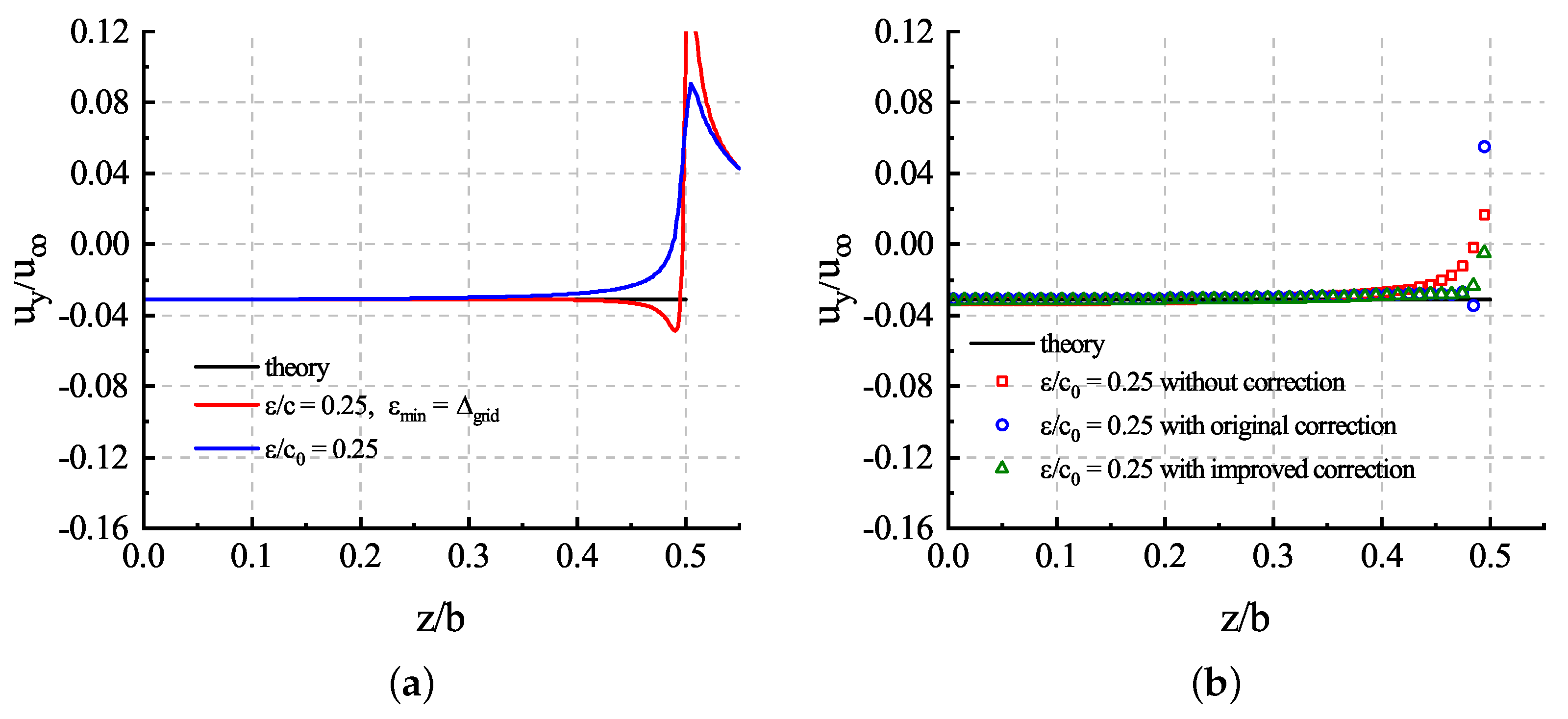
2.3. Improved Tip loss Correction
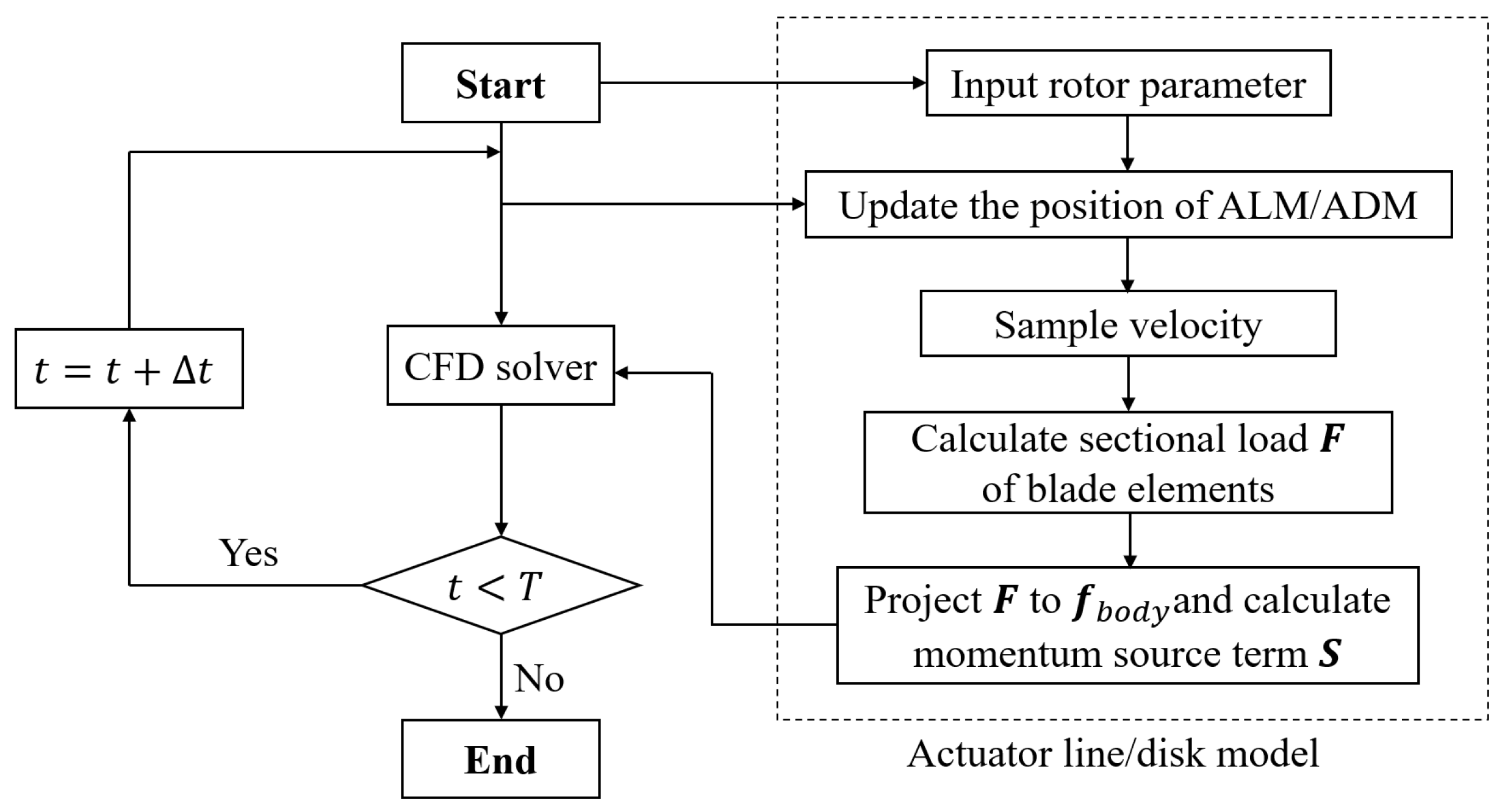
2.4. Implementation
| Algorithm 1: Primary computational process of body force |
| t ← t + Δt; Rotate actuation lines to new position;  Communicate urel between processors;  Communicate Gn−1 between processors; Compute ΔGn−1;  |
3. Results and Discussion
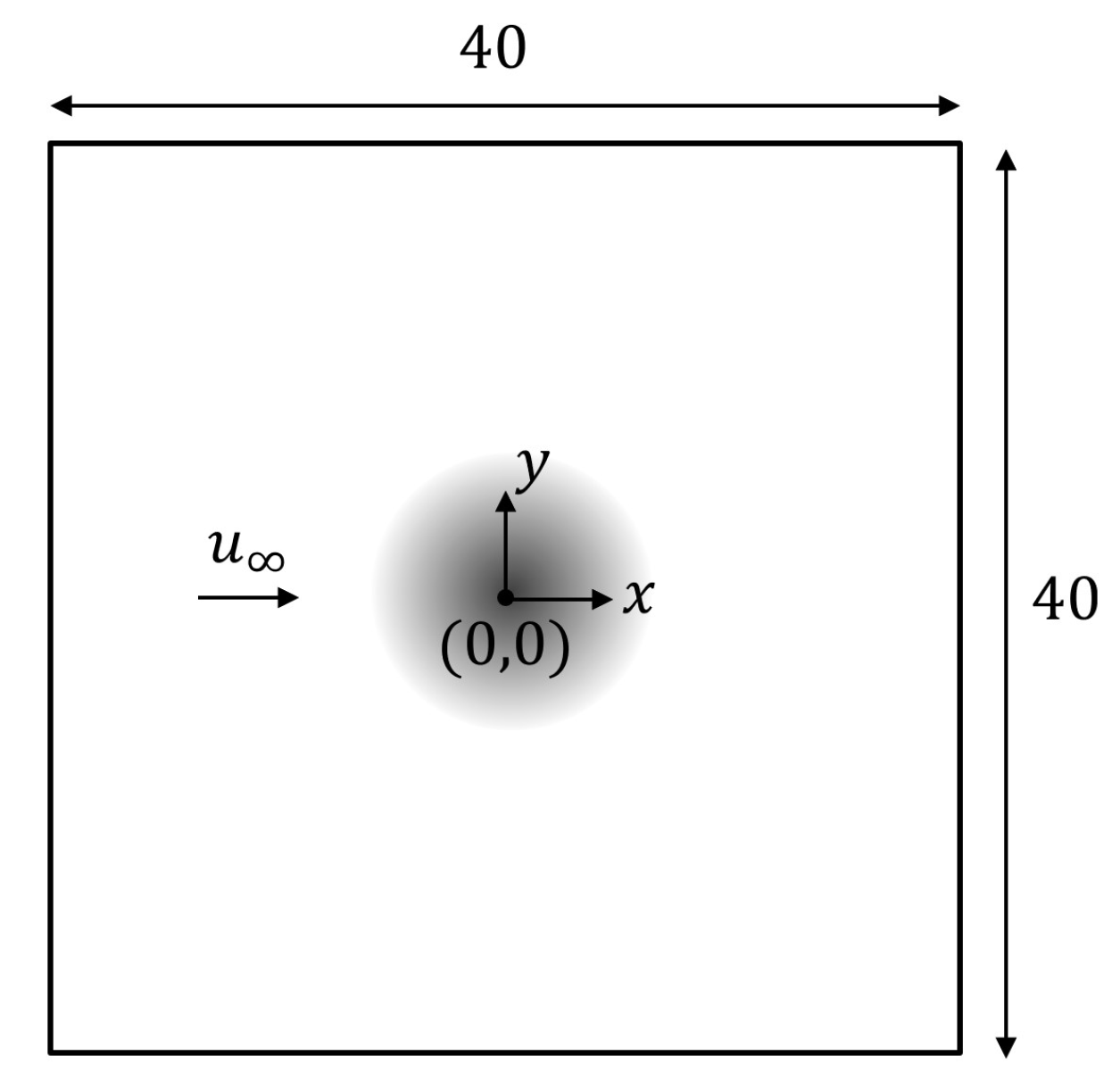
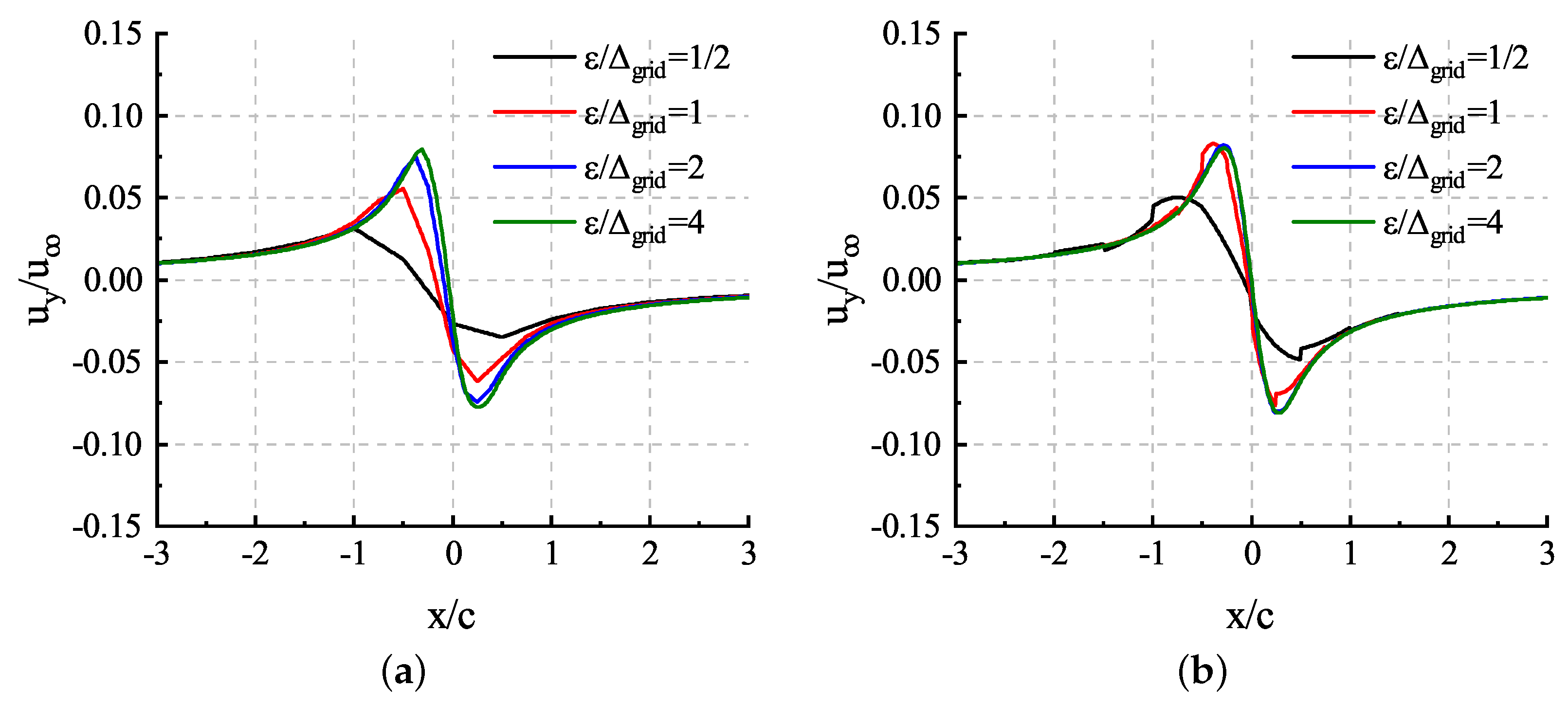
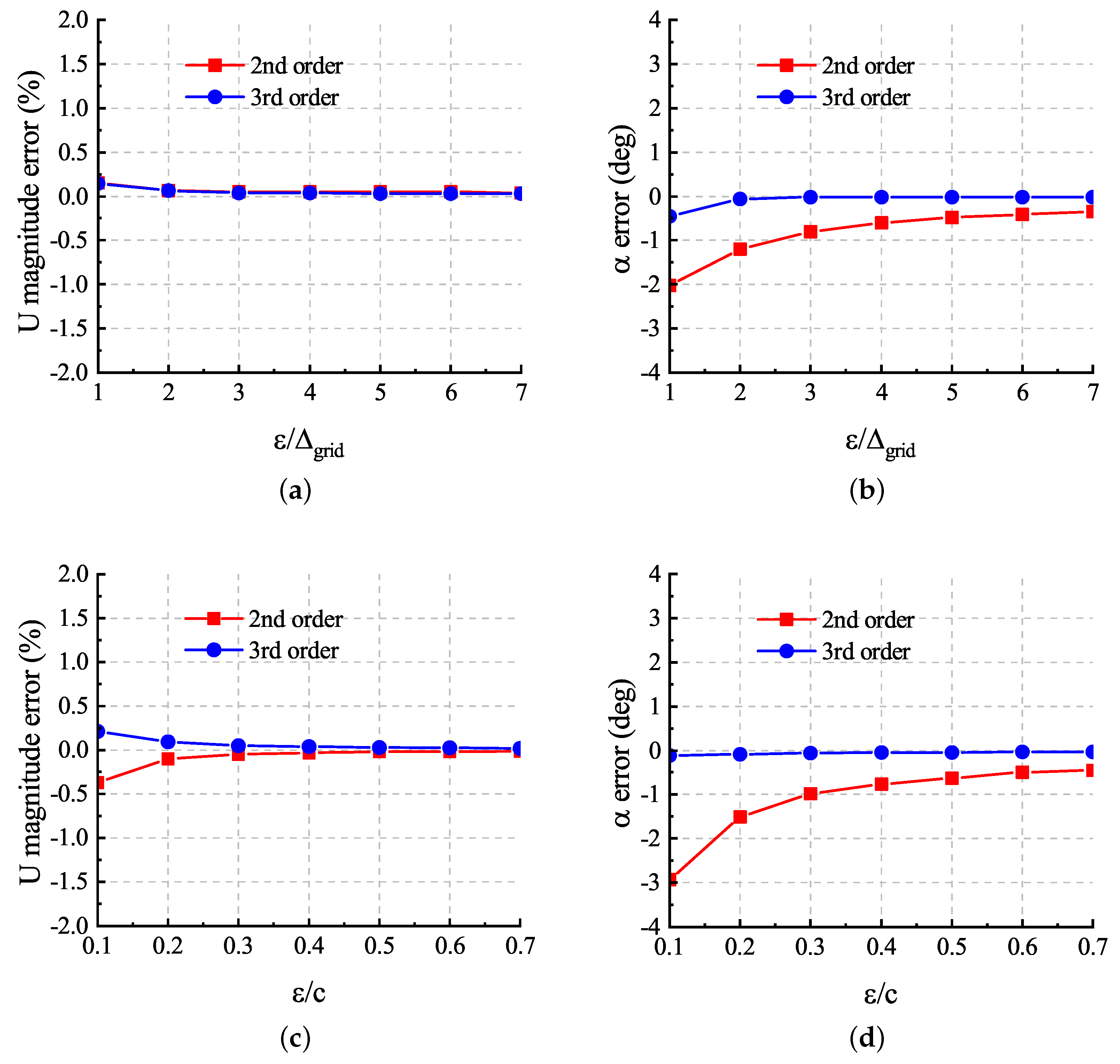
3.1. Two-Dimensional Infinite Wing
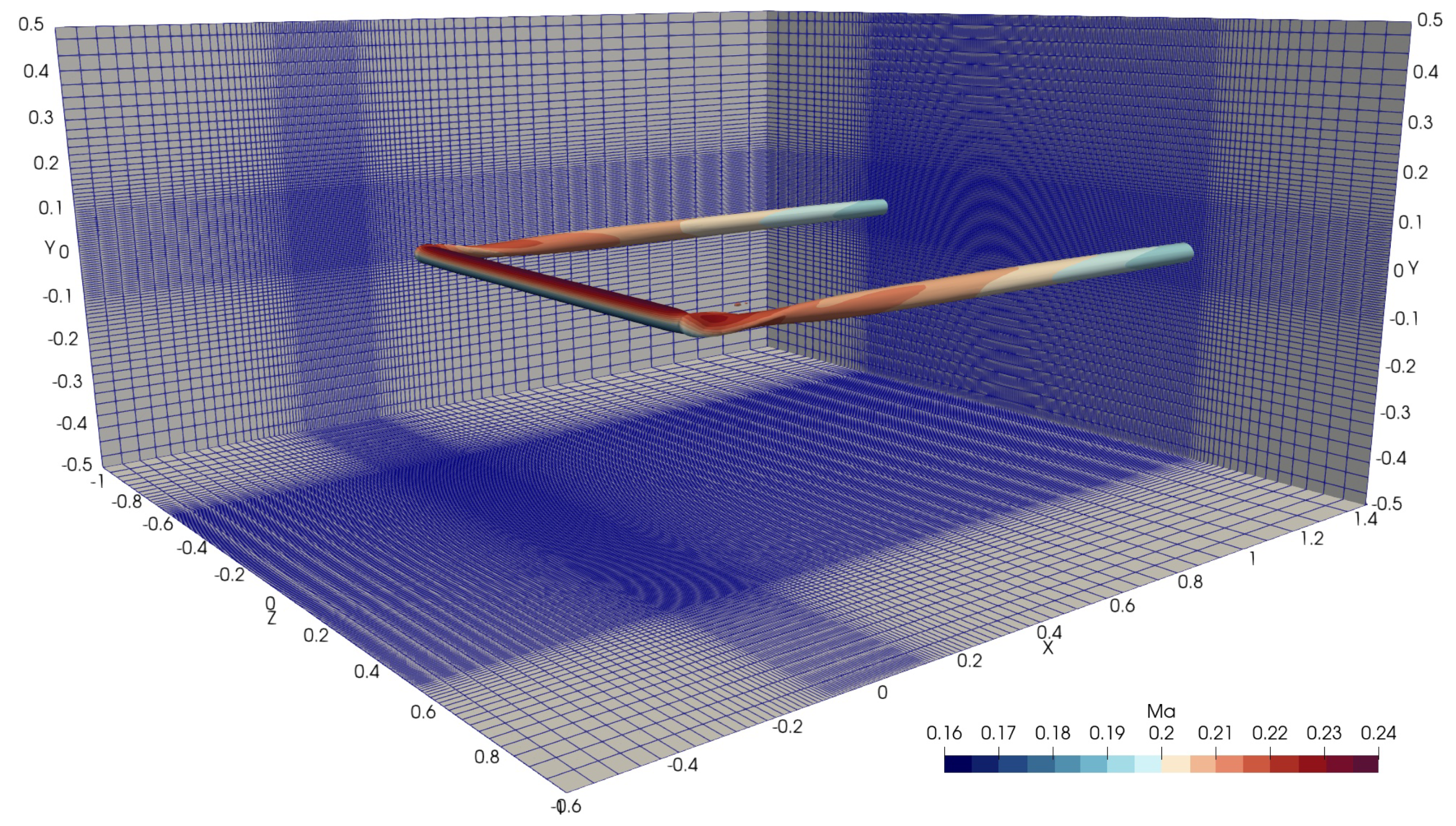
3.2. Three-Dimensional Finite Wing
3.2.1. Constant Circulation Rectangular Wing
3.2.2. Elliptically Loaded Wing
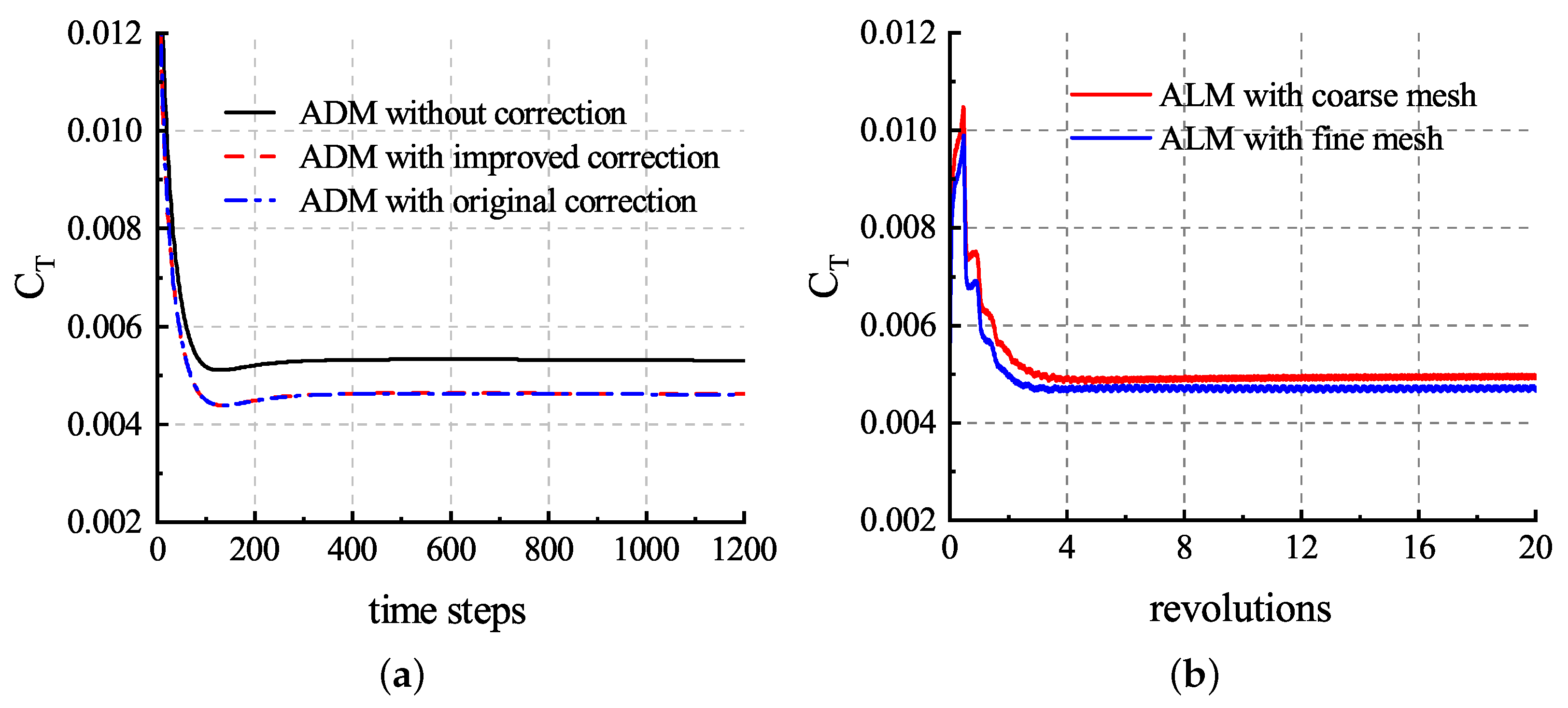
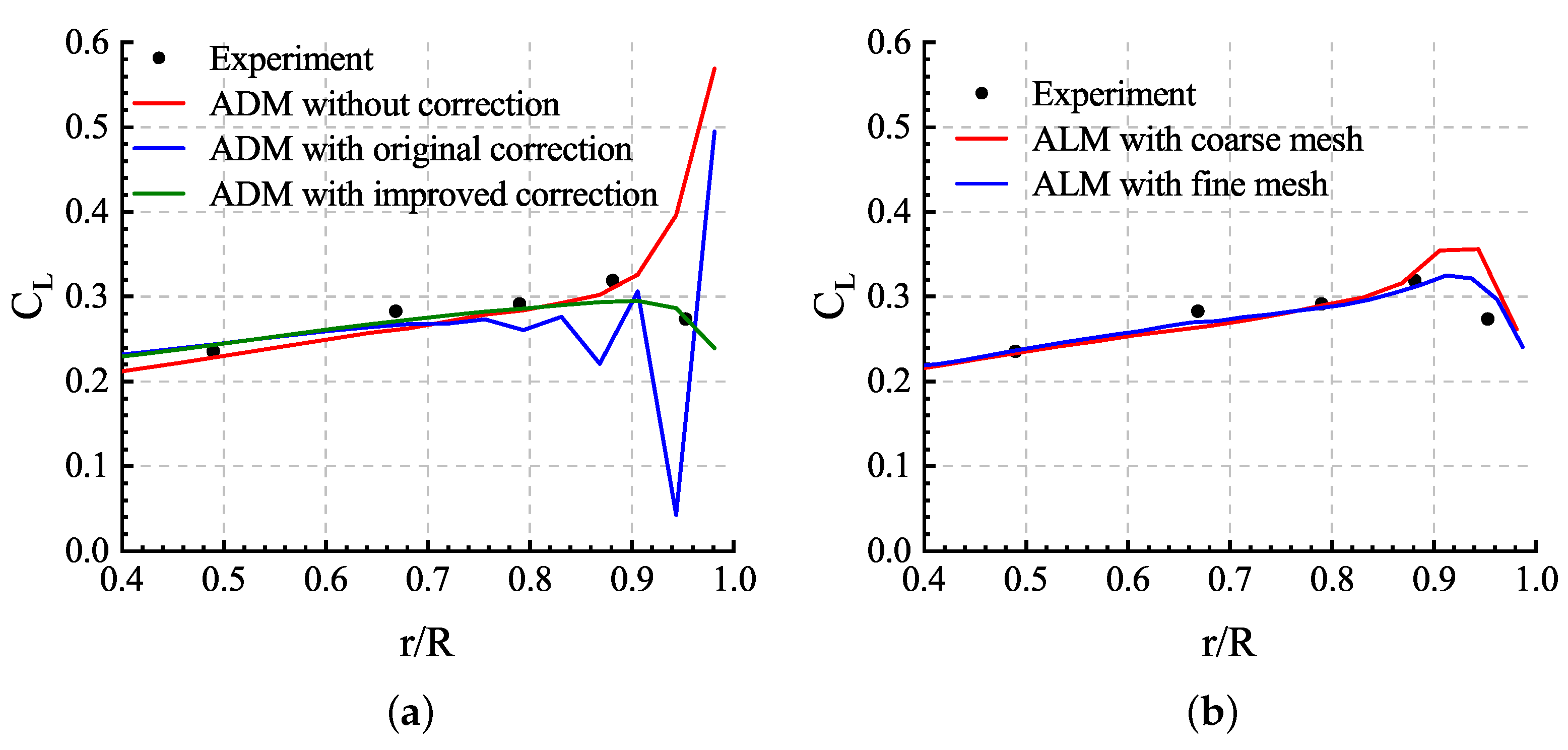
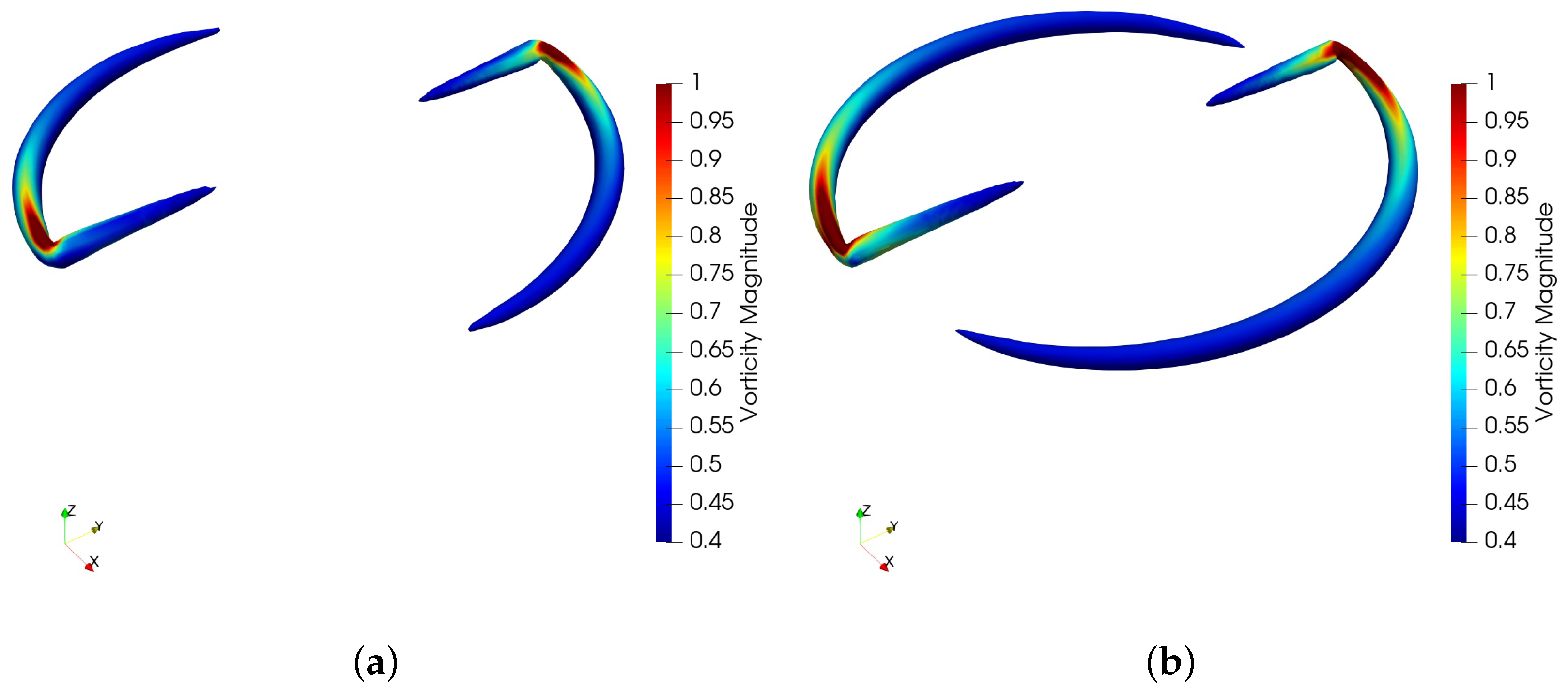
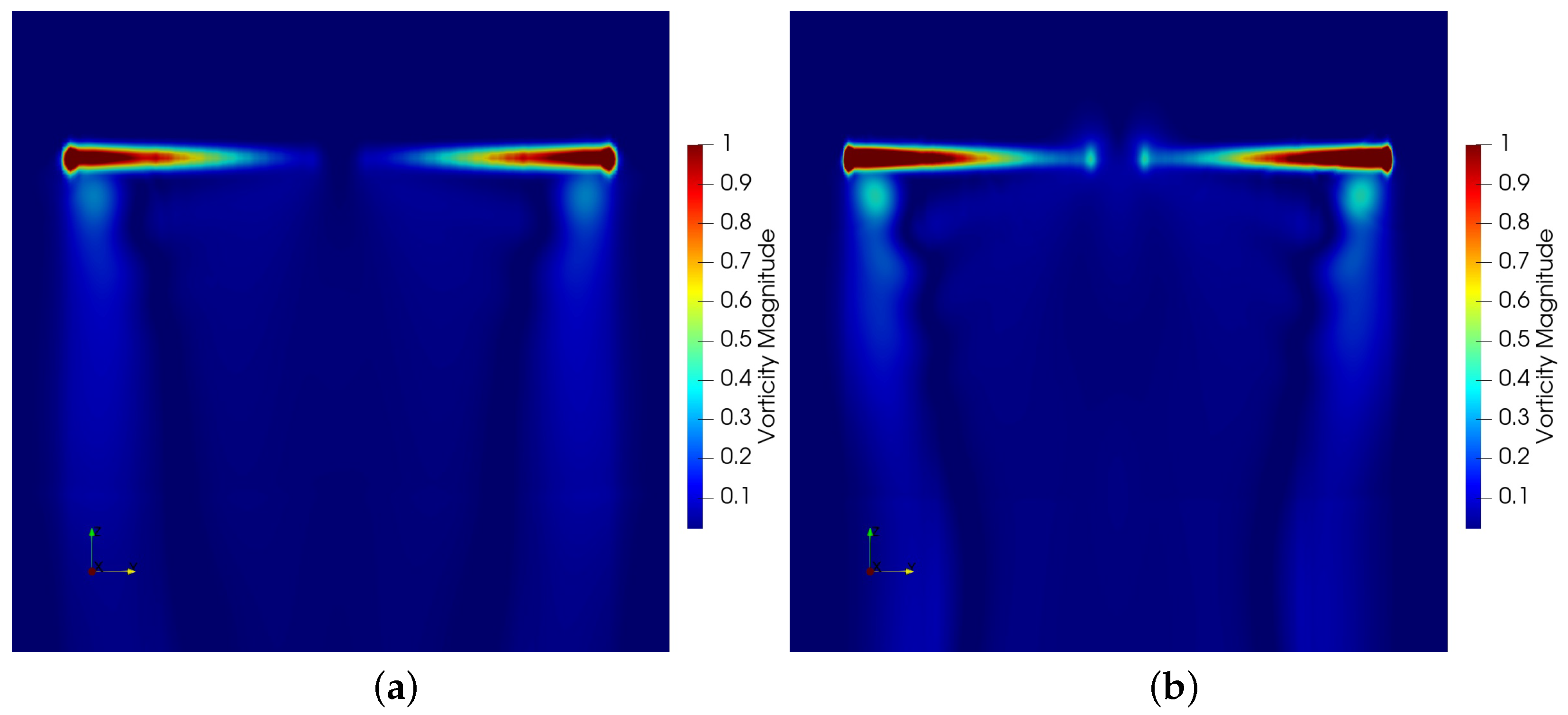
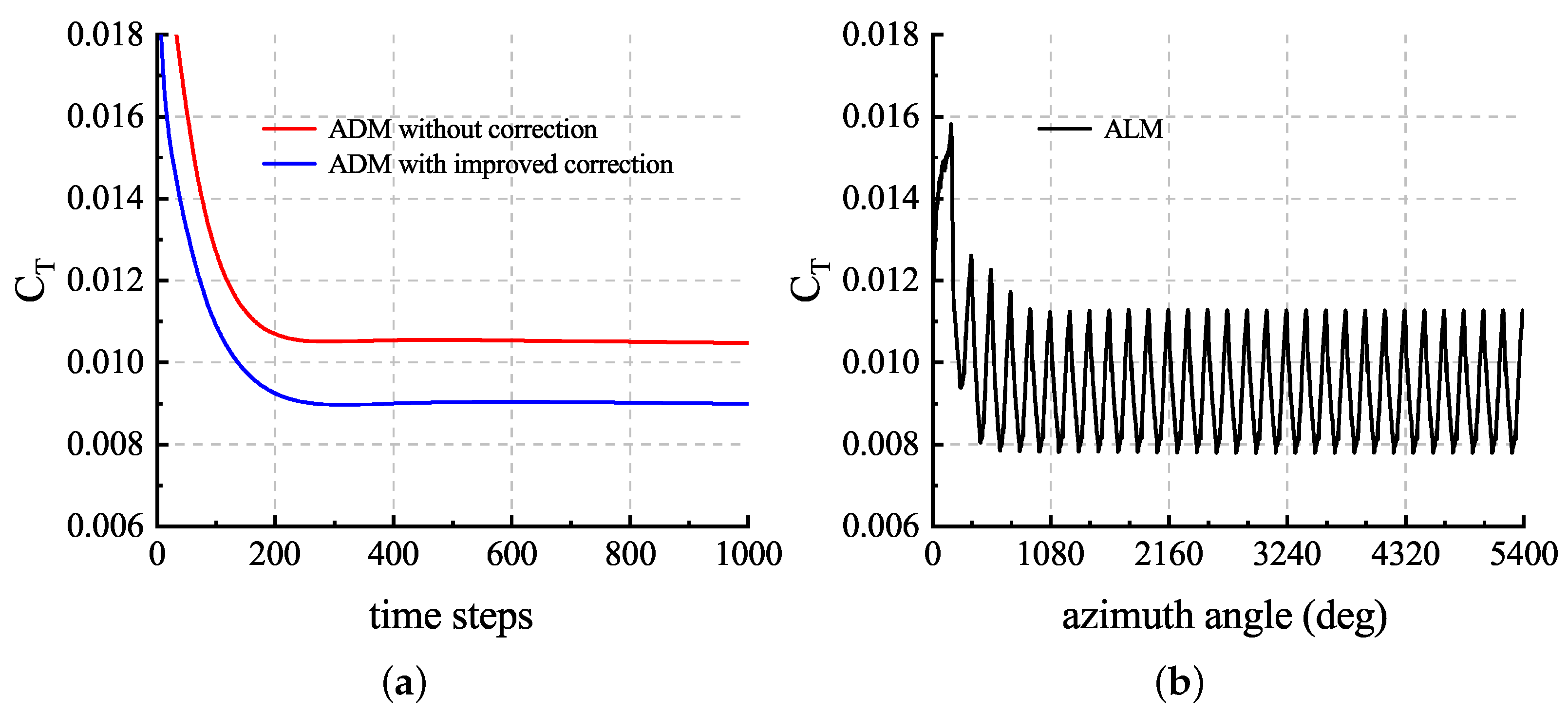
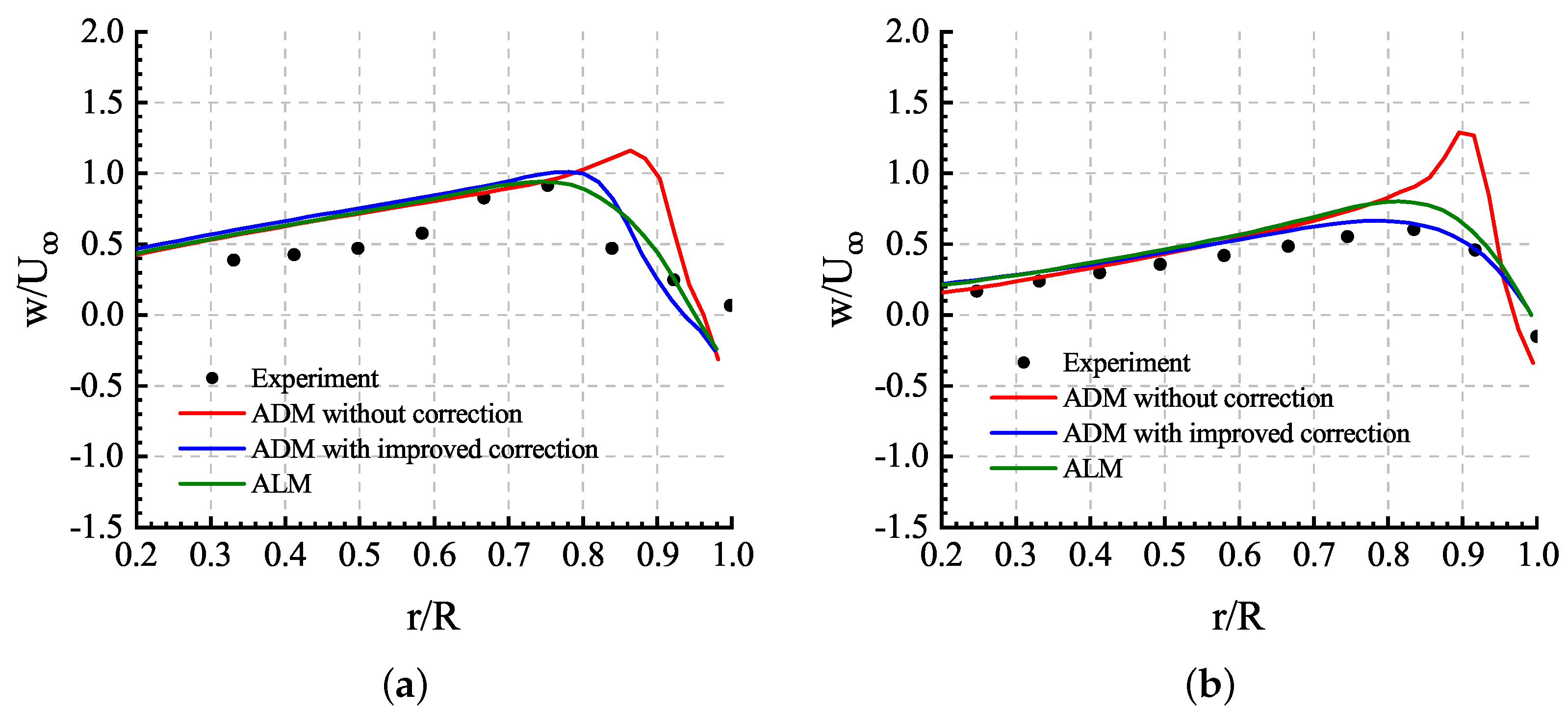
3.3. Hover Flight Rotor
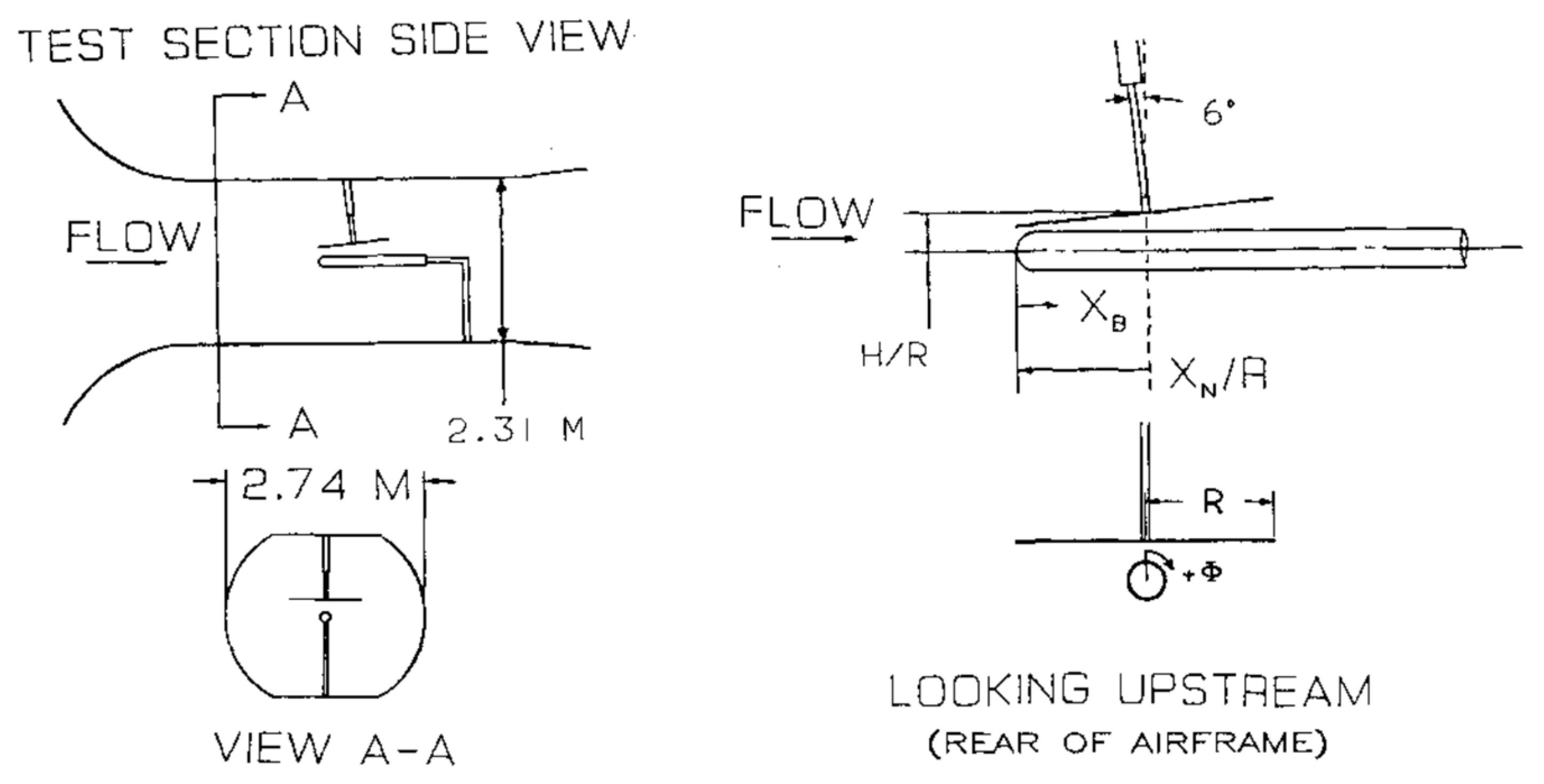
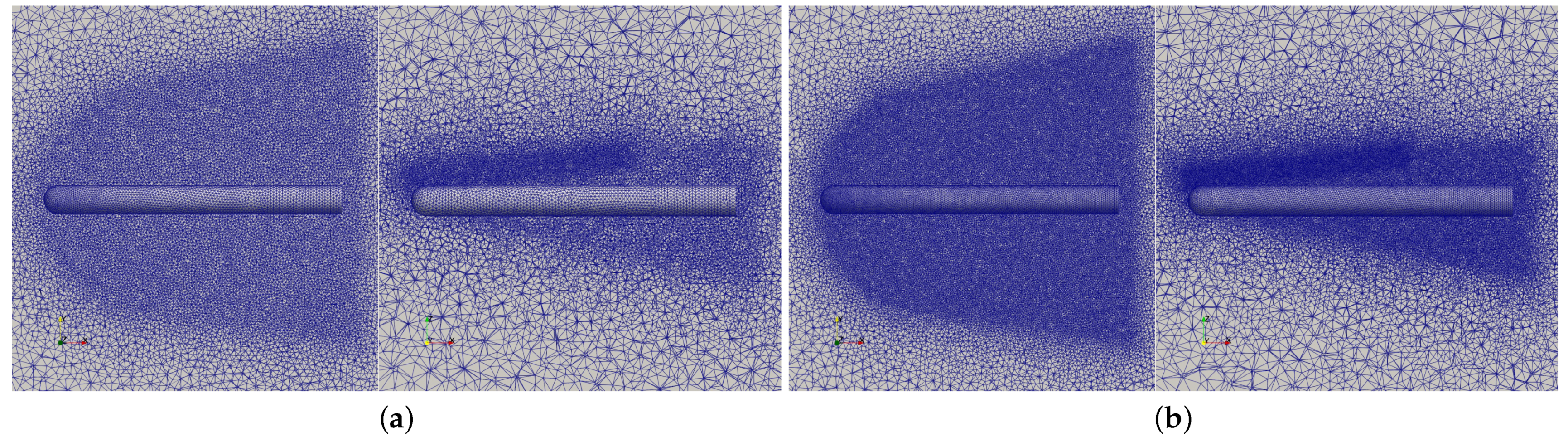
3.4. Forward Flight Rotor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALM | actuator line model |
| ADM | actuator disk model |
| RANS | Reynolds-averaged Navier–Stokes |
| SA | Spalart–Allmaras |
| SGS | symmetric Gauss–Seidel |
| Re | Reynolds number |
| Ma | Mach number |
| body force applied on control volumes | |
| blade force of the mth section of the nth blade | |
| projection weight of blade force of the mth section of the nth blade | |
| Gaussian length scale | |
| Gaussian length scale for projection | |
| optimal Gaussian length scale | |
| grid size | |
| spacing between actuator points | |
| coordinate of control volume center | |
| coordinate of actuator point of the mth section of the nth blade | |
| coordinate of blade root | |
| coordinate of blade tip | |
| radial coordinate of control volume center | |
| radial coordinate of actuator point of the mth section of the nth blade | |
| radial coordinate of blade root | |
| radial coordinate of blade tip | |
| distance to the actuator line | |
| radial distance over spacing between actuator points | |
| volumetric normalization factor of the mth section of the nth blade | |
| blade sectional lift coefficient | |
| blade sectional drag coefficient | |
| number of blades | |
| number of actuator lines | |
| c | local chord |
| relative angle of attack of a blade section | |
| relative velocity | |
| sampled velocity | |
| corrected velocity | |
| circulation | |
| rotor thrust coefficient | |
| advance ratio |
References
- Steijl, R.; Barakos, G.; Badcock, K. A CFD framework for analysis of helicopter rotors. In Proceedings of the 17th AIAA Computational Fluid Dynamics Conference, Toronto, ON, Canada, 6–9 June 2005; p. 5124. [Google Scholar]
- Ganti, Y.; Baeder, J. CFD analysis of a slatted UH-60 rotor in hover. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; p. 2888. [Google Scholar]
- Jain, R. Hover Predictions on the S-76 Rotor with Tip Shape Variation Using Helios. J. Aircr. 2018, 55, 66–77. [Google Scholar] [CrossRef]
- Guntupalli, K.; Rajagopalan, R.G. Development of discrete blade momentum source method for rotors in an unstructured solver. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 422. [Google Scholar]
- Mikkelsen, R.F. Actuator Disc Methods Applied to Wind Turbines. Ph.D. Thesis, Technical University of Denmark, Kongens Lyngby, Denmark, 2003. [Google Scholar]
- Martinez, L.; Leonardi, S.; Churchfield, M.; Moriarty, P. A comparison of actuator disk and actuator line wind turbine models and best practices for their use. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 900. [Google Scholar]
- Viguera Leza, D. Development of a Blade Element Method for CFD Simulations of Helicopter Rotors Using the Actuator Disk Approach. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Oruc, I.; Shenoy, R.; Shipman, J.; Horn, J.F. Towards Real-Time Fully Coupled Flight Dynamics and CFD Simulations of the Helicopter-Ship Dynamic Interface. In Proceedings of the AHS 72nd Annual Forum, West Palm, FL, USA, 17–19 May 2016. [Google Scholar]
- Shi, Y.; Xu, Y.; Zong, K.; Xu, G. An investigation of coupling ship/rotor flowfield using steady and unsteady rotor methods. Eng. Appl. Comput. Fluid Mech. 2017, 11, 417–434. [Google Scholar] [CrossRef]
- Dingxuan, Z.; Haojie, Y.; Shuangji, Y.; Tao, N. Numerical investigation for coupled rotor/ship flowfield using two models based on the momentum source method. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1902–1918. [Google Scholar] [CrossRef]
- Shives, M.; Crawford, C. Mesh and load distribution requirements for actuator line CFD simulations. Wind. Energy 2013, 16, 1183–1196. [Google Scholar] [CrossRef]
- Jha, P.K.; Schmitz, S. Actuator curve embedding–An advanced actuator line model. J. Fluid Mech. 2018, 834, R2. [Google Scholar] [CrossRef]
- Churchfield, M.J.; Schreck, S.J.; Martinez, L.A.; Meneveau, C.; Spalart, P.R. An advanced actuator line method for wind energy applications and beyond. In Proceedings of the 35th Wind Energy Symposium, Grapevine, TX, USA, 9–13 January 2017; p. 1998. [Google Scholar]
- Shen, W.Z.; Mikkelsen, R.; Sørensen, J.N.; Bak, C. Tip loss corrections for wind turbine computations. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 2005, 8, 457–475. [Google Scholar] [CrossRef]
- Jha, P.; Churchfield, M.; Moriarty, P.; Schmitz, S. Accuracy of state-of-the-art actuator-line modeling for wind turbine wakes. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 608. [Google Scholar]
- Jha, P.K.; Churchfield, M.J.; Moriarty, P.J.; Schmitz, S. Guidelines for volume force distributions within actuator line modeling of wind turbines on large-eddy simulation-type grids. J. Sol. Energy Eng. 2014, 136, 031003. [Google Scholar] [CrossRef]
- Kleine, V.G.; Hanifi, A.; Henningson, D.S. Non-iterative vortex-based smearing correction for the actuator line method. J. Fluid Mech. 2023, 961, A29. [Google Scholar] [CrossRef]
- Martínez-Tossas, L.A.; Meneveau, C. Filtered lifting line theory and application to the actuator line model. J. Fluid Mech. 2019, 863, 269–292. [Google Scholar] [CrossRef]
- Merabet, R.; Laurendeau, E. Hovering helicopter rotors modeling using the actuator line method. J. Aircraft 2022, 59, 774–787. [Google Scholar] [CrossRef]
- Zhang, C.; Xu, G.; Shi, Y. Investigation of a Virtual Blade Method for Aerodynamic and Acoustic Prediction of Helicopter Rotors. Int. J. Aeronaut. Space Sci. 2023, 24, 381–394. [Google Scholar] [CrossRef]
- Ji, Z.; Liang, T.; Fu, L. High-Order Finite-Volume TENO Schemes with Dual ENO-Like Stencil Selection for Unstructured Meshes. J. Sci. Comput. 2023, 95, 76. [Google Scholar] [CrossRef]
- Pei, W.; Jiang, Y.; Li, S. An Efficient Parallel Implementation of the Runge–Kutta Discontinuous Galerkin Method with Weighted Essentially Non-Oscillatory Limiters on Three-Dimensional Unstructured Meshes. Appl. Sci. 2022, 12, 4228. [Google Scholar] [CrossRef]
- Yang, M.; Li, S. An efficient implementation of compact third-order implicit reconstruction solver with a simple WBAP limiter for compressible flows on unstructured meshes. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2249135. [Google Scholar] [CrossRef]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flows. PhD. Thesis, Imperial College, University of London, UK, 1996. [Google Scholar]
- Huang, Q.M.; Ren, Y.X.; Wang, Q.; Pan, J.H. High-order compact finite volume schemes for solving the Reynolds averaged Navier-Stokes equations on the unstructured mixed grids with a large aspect ratio. J. Comput. Phys. 2022, 467, 111458. [Google Scholar] [CrossRef]
- Zhou, C.B.; Wang, Q.; Ren, Y.X. Machine learning optimization of compact finite volume methods on unstructured grids. J. Comput. Phys. 2024, 500, 112746. [Google Scholar] [CrossRef]
- Tsoutsanis, P.; Dumbser, M. Arbitrary high order central non-oscillatory schemes on mixed-element unstructured meshes. Comput. Fluids 2021, 225, 104961. [Google Scholar] [CrossRef]
- Ji, Z.; Liang, T.; Fu, L. A class of new high-order finite-volume TENO schemes for hyperbolic conservation laws with unstructured meshes. J. Sci. Comput. 2022, 92, 61. [Google Scholar] [CrossRef]
- Allmaras, S.R.; Johnson, F.T. Modifications and clarifications for the implementation of the Spalart-Allmaras turbulence model. In Proceedings of the 7th International Conference on Computational Fluid Dynamics (ICCFD7), Big Island, HI, USA, 9–13 July 2012; Volume 1902. [Google Scholar]
- Luo, H.; Baum, J.D.; Löhner, R. A fast, matrix-free implicit method for compressible flows on unstructured grids. J. Comput. Phys. 1998, 146, 664–690. [Google Scholar] [CrossRef]
- Petermann, J.; Jung, Y.S.; Baeder, J.; Rauleder, J. Validation of higher-order interactional aerodynamics simulations on full helicopter configurations. J. Am. Helicopter Soc. 2019, 64, 1–13. [Google Scholar] [CrossRef]
- Yoon, S.; Jameson, A. Lower-upper symmetric-Gauss-Seidel method for the Euler and Navier-Stokes equations. AIAA J. 1988, 26, 1025–1026. [Google Scholar] [CrossRef]
- Marten, D.; Pechlivanoglou, G.; Nayeri, C.; Paschereit, C. Integration of a WT Blade Design tool in XFOIL/XFLR5. In Proceedings of the 10th German Wind Energy Conference (DEWEK 2010), Bremen, Germany, 17–18 November 2010; pp. 17–18. [Google Scholar]
- Caradonna, F.X.; Tung, C. Experimental and analytical studies of a model helicopter rotor in hover. In Proceedings of the European Rotorcraft and Powered Lift Aircraft Forum, Bristol, UK, 16–19 September 1981. number A-8332. [Google Scholar]
- Young, L.A. Vortex Core Size in the Rotor Near-Wake; Technical Report; NASA: Washington, DC, USA, 2003. [Google Scholar]
- Shi, W.; Zhang, H.; Li, Y. Enhancing the Resolution of Blade Tip Vortices in Hover with High-Order WENO Scheme and Hybrid RANS–LES Methods. Aerospace 2023, 10, 262. [Google Scholar] [CrossRef]
- Brand, A.; McMahon, H.; Komerath, N. Surface pressure measurements on a body subject to vortex wake interaction. AIAA J. 1989, 27, 569–574. [Google Scholar] [CrossRef]
- Park, Y.M.; Nam, H.J.; Kwon, O.J. Simulation of unsteady rotor-fuselage interactions using unstructured adaptive meshes. In Proceedings of the Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 6–8 May 2003. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hexa | Prism | Total | ||||
|---|---|---|---|---|---|---|
| Coarse mesh | R | R | R | 1,000,692 | 969,570 | 1,970,262 |
| Fine mesh | R | R | R | 2,928,744 | 2,993,172 | 5,921,916 |
| Experiment | ADM without Correction | ADM with Origin Correction | ADM with Improved Correction | ALM with Coarse Mesh | ALM with Fine Mesh | |
|---|---|---|---|---|---|---|
| 0.0046 | 0.0053 | 0.00457 | 0.00463 | 0.0048 | 0.00465 |
| Time Step Size (°) | CPU Cores | Computational Time per Revolution (h) | Core Hours per Revolution (h) | |
|---|---|---|---|---|
| ALM2 with coarse mesh | 128 | |||
| ALM3 with coarse mesh | 128 | |||
| ALM2 with fine mesh | 320 | |||
| ALM3 with fine mesh | 320 |
| Tetra | ||||
|---|---|---|---|---|
| Coarse mesh | R | R | R | 3,065,054 |
| Fine mesh | R | R | R | 8,144,171 |
| Time Step Size (°) | CPU Cores | Computational Time per Revolution (h) | Core Hours per Revolution (h) | |
|---|---|---|---|---|
| ALM2 with coarse mesh | 128 | |||
| ALM3 with coarse mesh | 128 | |||
| ALM2 with fine mesh | 512 | |||
| ALM3 with fine mesh | 512 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Li, S.; Pei, W. Combination of Advanced Actuator Line/Disk Model and High-Order Unstructured Finite Volume Solver for Helicopter Rotors. Aerospace 2024, 11, 296. https://doi.org/10.3390/aerospace11040296
Yang M, Li S, Pei W. Combination of Advanced Actuator Line/Disk Model and High-Order Unstructured Finite Volume Solver for Helicopter Rotors. Aerospace. 2024; 11(4):296. https://doi.org/10.3390/aerospace11040296
Chicago/Turabian StyleYang, Minghao, Shu Li, and Weicheng Pei. 2024. "Combination of Advanced Actuator Line/Disk Model and High-Order Unstructured Finite Volume Solver for Helicopter Rotors" Aerospace 11, no. 4: 296. https://doi.org/10.3390/aerospace11040296
APA StyleYang, M., Li, S., & Pei, W. (2024). Combination of Advanced Actuator Line/Disk Model and High-Order Unstructured Finite Volume Solver for Helicopter Rotors. Aerospace, 11(4), 296. https://doi.org/10.3390/aerospace11040296